Изобретение относится к радиолокации и может быть использовано для повышения точности измерения угловых координат малоразмерных наземных радиоконтрастных целей.
Известны различные способы, обеспечивающие оценку угловых координат наземных стационарных целей. Наиболее простой из них - способ, заключающийся в сканировании антенны радиолокационной системы (РЛС) узким лучом ее диаграммы направленности (ДНА) заданного углового сектора и фиксации уровня отраженных сигналов приемным устройством РЛС с отображением интенсивности отраженных сигналов на индикаторе (формирование радиолокационного изображения (РЛИ) окружающего пространства в сектора обзора). При наличии в зоне обзора радиоконтрастной цели и попадании ее в луч ДНА индикатор фиксирует наличие цели (формирует отметку цели) и ее угловое положение по максимальному уровню принятого сигнала, соответствующему угловому положению максимума диаграммы направленности. Этот способ получил название «метод максимума» и описан, например в [П.А. Бакулев. Радиолокационные системы. Учебник для вузов - М.: Радиотехника, 2004].
Для повышения точности измерения угловых координат объектов используют моноимпульсный метод, суть которого состоит в сравнении параметров сигналов, принятых суммарной и разностными ДНА, формируемыми на единой апертуре антенны [Леонов А.И., Фомичев К.И., Моноимпульсная радиолокация, Москва, Радио и связь, 1984]. При этом угловое положение объекта определяется по положению так называемого равносигнального направления (РСН) - направления, соответствующего положению оптической оси антенны при одинаковом уровне принимаемых сигналов лучами разностной диаграммы.
Известный способ реализуется устройством (патент №2287839, Россия), которое содержит два приемных тракта, каждый из которых содержит последовательно включенную приемную антенну, усилитель высокой частоты, делитель мощности, один из выходов которого соединен с частотомером, а другие выходы с последовательно соединенными амплитудными детекторами, видеоусилителями и аналого-цифровыми преобразователями (АЦП), выходы усилительных трактов и частотомера подключены к вычислителю. Нормированное отношение разности принятых сигналов, с учетом частоты принятого сигнала, определяет пеленг цели.
Техническим результатом изобретения является повышение точности оценки угловых координат неземных малоразмерных целей, что позволит решить различные функциональные задачи, связанные с прицеливанием по обнаруженным целям, их сопровождением при маневрах носителя РЛС и т.д.
В предлагаемом способе измерение угловых координат наблюдаемых объектов осуществляется моноимпульсным методом, но в отличие от известных необходимая двухлепестковая диаграмма направленности антенны формируется за счет последовательного во времени установления синтезированной ДНА в два пространственных положения, при которых синтезированные диаграммы пересекаются на уровне 0,6-0,8 от максимального значения. Луч, проходящий через фазовый центр антенны и точку пересечения синтезированных диаграмм, определяет РСН, относительно которого обеспечивается определение углового положения цели (объекта).
Поставленная задача решаются тем, что осуществляется излучение и прием зондирующего сигнала в пределах диаграммы направленности антенны РЛС и его запоминание в течение определенного времени накопления; производится сжатие сигнала и стробирование по каналам дальности; в каждом из каналов дальности проводится доплеровская фильтрация запомненного сигнала, реализуемая алгоритмами спектрального анализа, в пределах времени накопления с вычислением амплитудного спектра; осуществляется поиск номеров каналов дальности и доплеровских фильтров, в которых значение амплитуды выходного сигнала фильтра превышает определенное пороговое значение (обнаружение целей); для каждой из обнаруженных целей определяется номер вспомогательного фильтра с наибольшим значением выходного сигнала из двух соседних с фильтром, значение амплитуды выходного сигнала которого превышает пороговое; по номерам каналов дальности и доплеровских фильтров рассчитываются грубые угловые положения обнаруженных целей; для каждой из обнаруженных целей формируются линейные комбинации значений выходных сигналов фильтров, содержащих сигнал от целей, и вспомогательных фильтров; на основании сформированных линейных комбинаций рассчитываются поправки к угловым положениям целей для каждой из целей; оценивается уточненное значение угловых положений целей как сумма грубых оценок угловых положений и угловых поправок.
В заявленном изобретении повышение точности оценки угловых координат цели обеспечивается за счет синтезирования апертуры антенны с дальнейшим уточнением углового положения цели за счет обработки, аналогичной обработке сигналов в амплитудных суммарно-разностных моноимпульсных пеленгаторах, позволяющей сформировать угловую поправку, которая рассчитывается на основе амплитуд выходных сигналов доплеровских фильтров, оцениваемых в процессе синтезирования апертуры.
Известно, что отклик радиолокационной системы с синтезированием апертуры антенны на входной сигнал одиночной точечной цели, иногда называют синтезированной диаграммой направленности (СДН) [Радиолокационные станции с цифровым синтезированием апертуры антенны / В.Н. Антипов, В.Т. Горяинов, А.Н. Кулин, и др.; Под ред. В.Т. Горяинова. - М.: Радио и связь, 1988, стр. 17]. Таким образом, можно применить моноимпульсный подход к выходным сигналам доплеровских фильтров. Поскольку при формировании РЛИ оцениваются только амплитуды сигналов доплеровских фильтров, то целесообразно использовать подходы, реализуемые в амплитудных моноимпульсных системах. Наиболее часто используются амплитудные суммарно-разностные системы моноимпульсные системы. В подобных системах направление на цель отсчитывается относительно равносигнального направления (РСН), положение которого считается заранее известным. Для расчета поправки относительно РСН осуществляется оценка амплитуд сигналов с двух антенн, диаграммы направленности которых пересекаются по выбранному уровню, и после этого формируются их линейные комбинации (сумма и разность), а затем и отношение разности амплитуд к их сумме. Это отношение далее умножается на крутизну пеленгационной характеристики (которая определяется параметрами антенной системы РЛС и считается известной). Результат умножения есть модуль величины поправки. Кроме этого, анализируя разность амплитуд, оценивается знак поправки (плюс или минус). После оценки модуля и разности поправки она добавляется к углу ориентации РСН.
Исследования показали, что повышение точности определения углового положения наземных целей, достигается примерно в 10-20 раз по сравнению с оценками, формируемыми без использования заявленных алгоритмов уточнения.
Изобретение поясняется чертежами. На фиг. 1 иллюстрируется положение двух СДН, на фиг. 2 показана исходная ситуация, на фиг. 3 - пояснения к моноимпульсному способу оценки углового положения цели, на фиг. 4 - пояснения к заявленному способу уточнения углового положения цели.
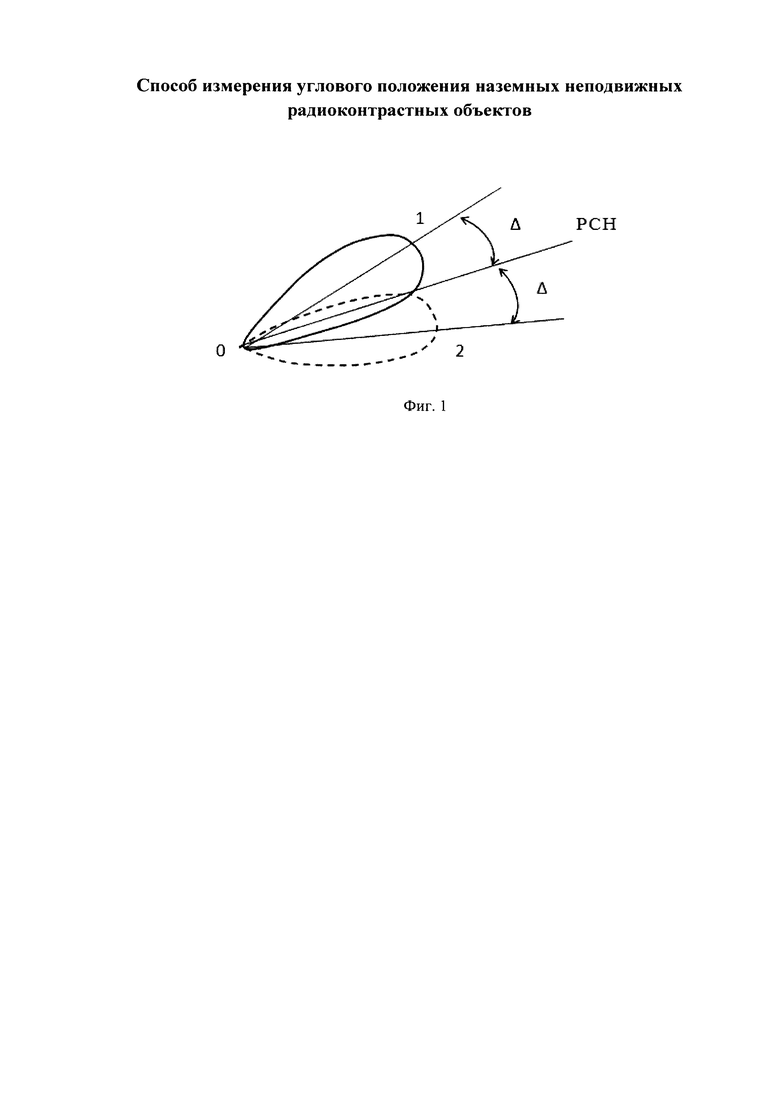
На фиг. 1 представлено изображение, поясняющее процесс образования равносигнального направления (РСН) путем пересечения двух ДН синтезированных апертур искусственной антенны при последовательном их формировании во времени и удовлетворяющих двум пространственным положениям (1 и 2), при которых обеспечивается смещение максимумов диаграмм, равное 2Δ.
На фиг. 2 обозначено: ЦК - центр кадра, формируемого на носителе РЛС (радиолокационного изображения), ТЦ - точечная цель, угловое положение которой необходимо оценить, Θц - истинное угловое положение точечной цели, которое подлежит оцениванию, Θ0 - ширина диаграммы направленности антенны, Θн - угловое направление на центр кадра, Rн -дальность до центра кадра.
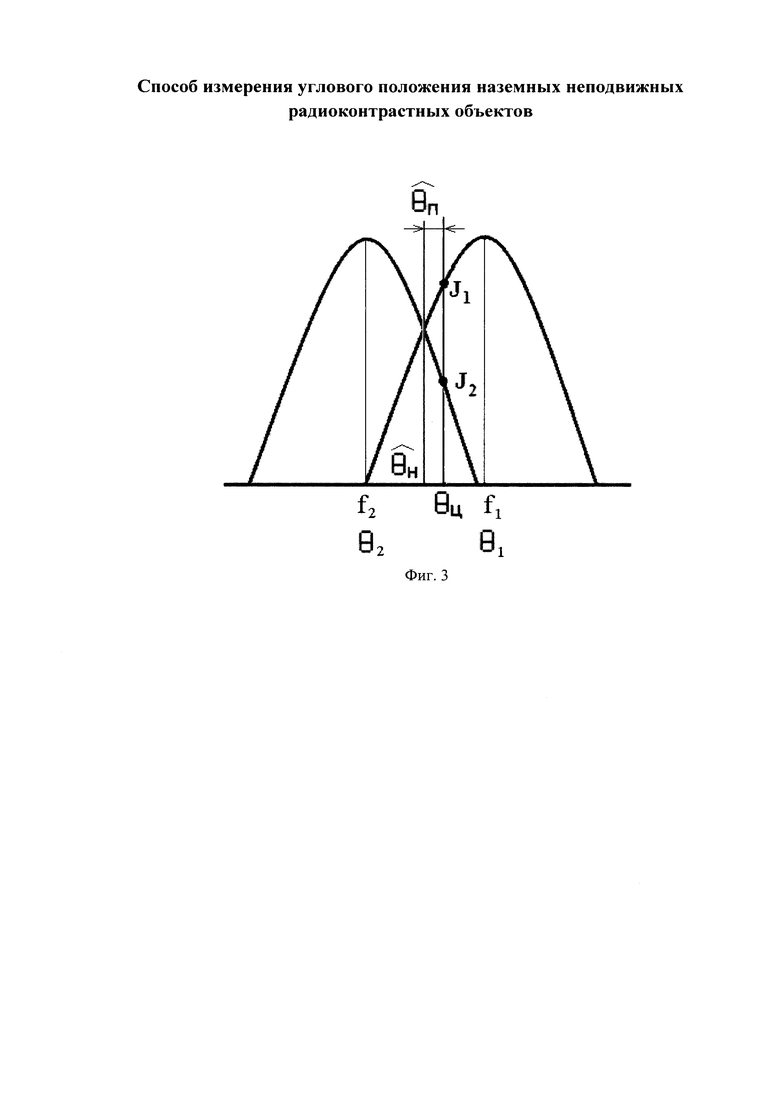
На фиг. 3 введены следующие обозначения. Θц - истинное угловое положение цели, Θн - угловое положение равносигнального направления (РСН),  - оценка угловой поправки, J1, J2 - амплитуды выходных сигналов с 1 и 2 доплеровских фильтров соответственно, f1, f2 - частоты настройки доплеровских фильтров, Θ1, Θ2 - соответствующие им угловые направления.
- оценка угловой поправки, J1, J2 - амплитуды выходных сигналов с 1 и 2 доплеровских фильтров соответственно, f1, f2 - частоты настройки доплеровских фильтров, Θ1, Θ2 - соответствующие им угловые направления.
Угловое положение РСН Θн считается известным. На основе амплитуд выходных сигналов антенн J1, J2 угловая поправка  рассчитывается по следующему правилу:
рассчитывается по следующему правилу:  .
.
Знак разности амплитуд указывает на знак поправки. Для формирования оценки углового положения  к угловому положению РСН добавляется оцененное значение поправки
к угловому положению РСН добавляется оцененное значение поправки 
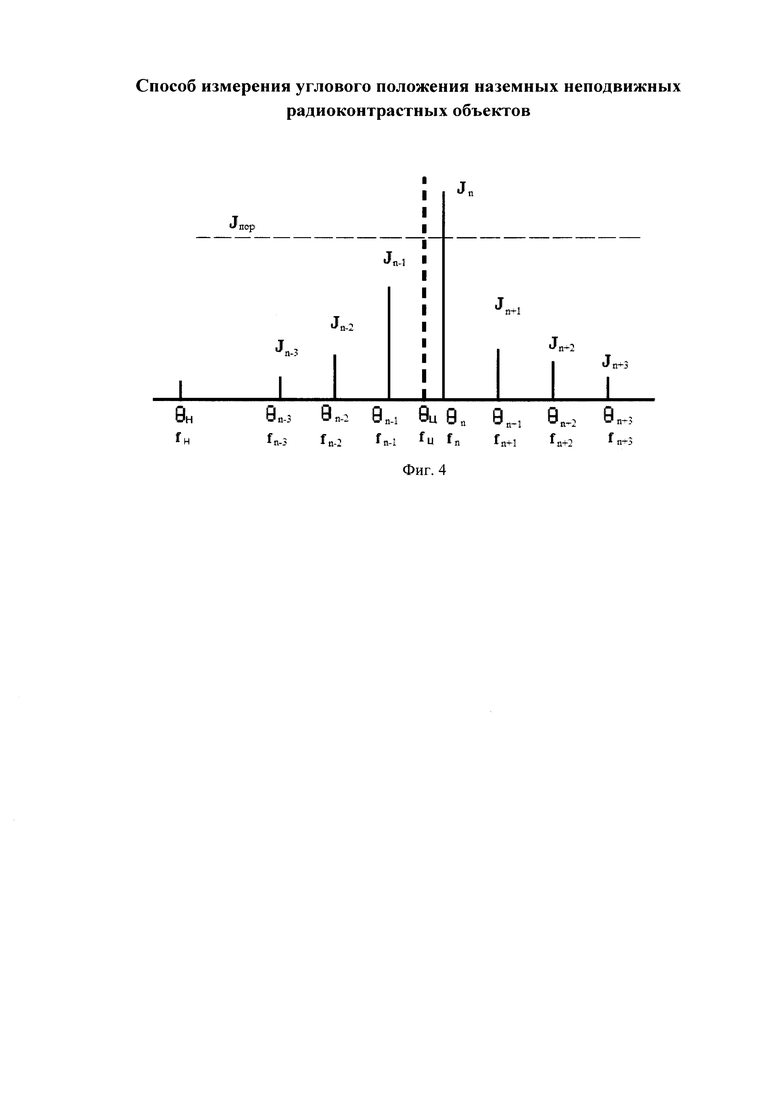
Фиг. 4 поясняет заявленный способ оценки углового положения цели. Здесь Θн - угловое положение максимума ДН реальной антенны, соответствующее центру формируемого кадра РЛИ, fH - доплеровская частота сигнала, соответствующая максимуму ДНА,  , V - скорость полета носителя РЛС, λ - длина волны зондирующего сигнала РЛС, fn - частоты настройки фильтров доплеровской селекции, Θn - соответствующие им угловые положения
, V - скорость полета носителя РЛС, λ - длина волны зондирующего сигнала РЛС, fn - частоты настройки фильтров доплеровской селекции, Θn - соответствующие им угловые положения  , Jn - значения амплитуд выходных сигналов доплеровской селекции, Jпор - пороговое значение амплитуды, Θц - истинное угловое положение цели, fц - истинная частота сигнала цели
, Jn - значения амплитуд выходных сигналов доплеровской селекции, Jпор - пороговое значение амплитуды, Θц - истинное угловое положение цели, fц - истинная частота сигнала цели  .
.
После формирования массива амплитуд выходных сигналов фильтров доплеровской селекции J во всех каналах дальности осуществляется пороговая обработка, которая заключается в сравнении значения амплитуды сигнала на выходе фильтра с пороговым значением Jпор. Фильтр, выходной сигнал которого превысил порог (Jn), содержит в себе основную часть сигнала от цели, поскольку имеет ближайшую к истинной частоте сигнала опорную частоту. После этого определяется номер соседнего фильтра, имеющего максимальную амплитуду (вспомогательный фильтр). В данном случае этот фильтр расположен слева и имеет номер (n-1). Используя номера основного и вспомогательного фильтра рассчитывается грубое угловое положение цели  .
.
Расчет угловой поправки осуществляется следующим образом. После определения номеров основного и вспомогательного фильтров формируются линейные комбинации амплитуд их выходных сигналов - JΣ=Jn+Jn-1, JΔ=Jn-Jn-1. Затем рассчитывается оценка угловой поправка, уточняющая угловое положение цели, -  , где КПХ - крутизна пеленгационной характеристики, определяемая следующим образом:
, где КПХ - крутизна пеленгационной характеристики, определяемая следующим образом: 
 - угловая разрешающая способность РЛС при накоплении сигнала в течение времени синтезирования ТН, ΔJ - разница амплитуд выходных сигналов при нахождении цели на краях доплеровских фильтров, которая определяется экспериментальным путем. Для получения окончательной оценки углового положения цели рассчитанная угловая поправка
- угловая разрешающая способность РЛС при накоплении сигнала в течение времени синтезирования ТН, ΔJ - разница амплитуд выходных сигналов при нахождении цели на краях доплеровских фильтров, которая определяется экспериментальным путем. Для получения окончательной оценки углового положения цели рассчитанная угловая поправка  добавляется к грубой оценке угловой координаты цели
добавляется к грубой оценке угловой координаты цели  .
.
Реализация данного способа высокоточного измерения углового положения стационарных наземных точечных целей возможна при использовании когерентной РЛС с режимом синтезирования апертуры искусственной антенны при последовательном во времени формировании двух ДН синтезированных апертур, максимумы которых смещены друг относительно друга на величину, не превышающую значение ширины диаграммы θCA синтезированной апертуры. Смещение синтезированных ДН обеспечивается путем формирования опорных функций с требуемыми параметрами при обработке траекторного сигнала в системе обработки РЛС в течение времени синтезирования. Процесс обработки также включает сжатие сигнала и стробирование по каналам дальности с последующим проведением спектрального анализа запомненного сигнала в каждом из каналов дальности и вычислением амплитудного спектра, определение номеров каналов дальности и доплеровских фильтров, в которых уровень выходного сигнала превысил установленный порог, вычисление грубых значений  угловых координат обнаруженных целей, формирование суммы и разности значений выходных сигналов основных и вспомогательных фильтров, вычисление поправки
угловых координат обнаруженных целей, формирование суммы и разности значений выходных сигналов основных и вспомогательных фильтров, вычисление поправки  к угловым координатам целей (для каждой из целей) и определение их точного углового положения.
к угловым координатам целей (для каждой из целей) и определение их точного углового положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЗЕМНЫХ ПРЕПЯТСТВИЙ ПРИ ПОЛЕТЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА МАЛОЙ ВЫСОТЕ | 1997 |
|
RU2128846C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ БОРТОВОЙ РЛС, УСТАНОВЛЕННОЙ НА ДВИЖУЩЕМСЯ ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2013 |
|
RU2528169C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО ДАЛЬНОСТИ И АЗИМУТУ | 2005 |
|
RU2287879C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| Способ обработки радиолокационных сигналов в моноимпульсной РЛС | 2016 |
|
RU2636058C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ В БОРТОВОЙ ДОПЛЕРОВСКОЙ РЛС С ЛИНЕЙНОЙ АНТЕННОЙ РЕШЕТКОЙ | 2014 |
|
RU2569843C1 |
| Способ оценки радиальной скорости объекта | 2018 |
|
RU2696084C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ В БОРТОВОЙ ЧЕТЫРЕХКАНАЛЬНОЙ ДОПЛЕРОВСКОЙ РЛС | 2014 |
|
RU2572357C1 |

Изобретение относится к радиолокации и может быть использовано для любых летательных аппаратов, имеющих на борту радиолокационную систему обзора подстилающей поверхности. Технический результат заключается в повышении точности измерения азимутального (горизонтального) углового положения радиоконтрастных наземных стационарных целей при функционировании РЛС в режиме синтезирования апертуры (СА). Указанный технический результат достигается путем использования моноимпульсных принципов обработки выходных сигналов доплеровских фильтров, реализованных в цифровой системе обработки сигналов РЛС в режиме картографирования подстилающей поверхности. 4 ил.
Способ измерения углового положения наземных неподвижных радиоконтрастных объектов, содержащий в себе этапы:
- излучение и прием зондирующего сигнала в пределах диаграммы направленности антенны РЛС, преобразование его в цифровую форму и запоминание в течение определенного времени накопления;
- сжатие сигнала и стробирование по каналам дальности;
- в каждом из каналов дальности проводится доплеровская фильтрация запомненного сигнала в пределах времени накопления с вычислением амплитудного спектра;
- осуществляется поиск номеров каналов дальности и доплеровских фильтров, в которых значение амплитуды выходного сигнала фильтра превышает определенное пороговое значение;
- для каждой из обнаруженных целей определяется номер вспомогательного фильтра с наибольшим значением выходного сигнала из двух соседних с фильтром, значение амплитуды выходного сигнала которого превышает пороговое;
- по номерам каналов дальности и доплеровских фильтров рассчитываются грубые угловые положения обнаруженных целей;
- для каждой из обнаруженных целей формируются линейные комбинации значений выходных сигналов фильтров, содержащих сигнал от целей, и вспомогательных фильтров;
- на основании сформированных линейных комбинаций рассчитываются поправки к угловым положениям целей для каждой из целей;
- оценивается уточненное значение угловых положений целей как сумма грубых оценок угловых положений и угловых поправок.
| УСТРОЙСТВО ДЛЯ МОНОИМПУЛЬСНОГО ИЗМЕРЕНИЯ ПЕЛЕНГА ИСТОЧНИКОВ РАДИОСИГНАЛОВ | 2004 |
|
RU2287839C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЗЕМНЫХ ПРЕПЯТСТВИЙ ПРИ ПОЛЕТЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА МАЛОЙ ВЫСОТЕ | 1997 |
|
RU2128846C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПОВЕРХНОСТЬЮ НА БАЗЕ МНОГОКАНАЛЬНОЙ БОРТОВОЙ РЛС | 2006 |
|
RU2316786C1 |
| МОНОИМПУЛЬСНОЕ РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО СОПРОВОЖДЕНИЯ ПО НАПРАВЛЕНИЮ | 2004 |
|
RU2273863C1 |
| US 7522090 B2, 21.04.2009 | |||
| СПОСОБ ДУГОВОЙ СВАРКИ В ИНЕРТНЫХ ГАЗАХ СТЫКОВЫХ СОЕДИНЕНИЙ РАЗНОРОДНЫХ АЛЮМИНИЕВЫХ СПЛАВОВ | 2006 |
|
RU2357841C2 |
| US 8212714 B1, 03.07.2012. | |||

