Изобретение относится к области радиолокации и может быть использовано для углового разрешения цели наземных и бортовых радиолокационных станций (РЛС) при обзоре воздушного пространства или поверхности земли.
Известен способ углового разрешения цели РЛС в режиме обзора - формирование узкой диаграммы направленности антенны (ДНА), которое достигается за счет увеличения размера антенны или уменьшения длины волны (Применение цифровой обработки сигналов: Пер. с англ./Под ред. Э. Оппенгейма, пер. под ред. А.М. Рязанцева. - М.: Мир, 1980, стр.269).
Известному способу углового разрешения цели РЛС свойственны недостатки, заключающиеся в том, что при переходе к более коротким волнам уменьшается дальность действия РЛС, поскольку такие волны сильнее затухают при распространении в среде, а применение антенн больших размеров весьма ограниченно вследствие немалых материальных и финансовых затрат на их создание, изготовление и обслуживание.
Из известных способов углового разрешения цели РЛС при обзоре поверхности земли наиболее близким по достигаемому результату является способ формирования синтезированной ДНА (В.н. Антипов, В.Т. Горянов и др. Радиолокационные станции с цифровым синтезированием апертуры антенны. - М.: Радио и связь, 1988).
Сущность этого способа заключается в излучении РЛС, установленной на движущемся самолете, когерентных зондирующих сигналов, приеме соответствующих отраженных сигналов вдоль прямолинейной траектории полета носителя, их запоминании и когерентном (синфазном) сложении, аналогично тому, как это делается в фазированных антенных решетках большого раскрыва. Роль искусственного раскрыва антенны в данном случае играет участок траектории полета самолета. Размер этого участка определяется возможным временем запоминания отраженных сигналов. В результате синфазного сложения принимаемых сигналов осуществляется сжатие антенного луча и существенное повышение разрешающей способности РЛС вдоль линии пути носителя.
Процесс синтезирования апертуры (СА) антенны известным способом реализуется в согласованном фильтре и описывается следующим выражением (В.Н. Антипов, В.Т. Горяинов и др.; Под ред. В.Т. Горяинова. Радиолокационные станции с цифровым синтезированием апертуры антенны. - М.: Радио и связь, 1988, стр. 16).

где J(η) - сигнал, соответствующий радиолокационному изображению (РЛИ);
ξ(x) - траекторный сигнал на выходе согласованного фильтра;
ξT(x) - траекторий сигнал на входе согласованного фильтра;
hC(x)=h0(-x) - импульсная характеристика согласованного фильтра, которая совпадает с инвертированной во времени опорной функцией h0(x);
x=V•t - азимутальная координата;
V - скорость носителя;
L - длина интервала синтезирования;
η - временной сдвиг между траекторным сигналом ξT(x) и импульсной характеристикой согласованного фильтра hС(x), который становится координатой РЛИ; операция взятия модуля функции.
операция взятия модуля функции.
В качестве опорной функции выбирается взвешенная функция с точностью до начальной фазы, комплексно-сопряженная с сигналом, отраженным от одиночной точечной цели
h0(x)=Н0(х)(ехр[j•Ф(х)], (2)
где H0(x) - действительная весовая функция, вид которой зависит от выбранного подхода к синтезу системы обработки;
Ф(x) = 4πR(x)/λ - закон изменения фазы отраженного сигнала от одиночной точечной цели;
R(x) - расстояние между летательным аппаратом и целью.
Поскольку при боковом обзоре опорная функция четная, то импульсная характеристика согласованного фильтра
hС(x)=h0(х)=Н0(х)•ехр[j•Ф(х)], (3)
где Ф(x) = 2πx2/(λRo) - закон изменения фазы отраженного сигнала от одиночной точечной цели;
Rо - расстояние между летательным аппаратом и целью при t=0.
Недостатком прототипа является то, что реальная система формирования радиолокационных изображений обладает определенными ограниченными возможностями, а именно синтезированная ДНА или импульсная характеристика радиолокационной системы (включая систему обработки сигнала) имеет конечную ширину, что приводит к неизбежному снижению разрешающей способности. Поэтому в результате обработки известным способом отраженного сигнала от одиночной точечной цели на выходе согласованного фильтра получаем размытое изображение точечной цели или синтезированную ДНА не нулевой ширины. Если на изображении необходимо выделить важные детали, размер которых близок к ширине синтезированной ДНА, то необходимо бороться с потерями разрешения. Кроме того, способ СА не всегда можно использовать. Например, при обзоре воздушного пространства СА практически не применяется.
Задачей изобретения является повышение угловой разрешающей способности наземных и бортовых РЛС при обзоре пространства и поверхности земли.
Решение ее достигается тем, что в известном способе углового разрешения цели, заключающемся в том, что излучают зондирующие сигналы, принимают отраженные сигналы, запоминают их, осуществляют согласованную фильтрацию зажженного сигнала, обнаруживают цель и оценивают ее угловое положение, согласно изобретению до обнаружения цели производят апостериорную обработку отфильтрованных сигналов путем восстановления входного сигнала.
Конечная ширина импульсной характеристики реальной радиолокационной системы формирования отраженного сигнала и системы его обработки вызывает искажение входного сигнала. Процесс восстановления (или устранение искажений) предусматривает апостериорное обращение тех этапов формирования и обработки сигнала, которые вызвали его искажение. При этом реальные явления, вызывающие искажения, заменяются их математической моделью. Так, траекторный сигнал ξ(x) на выходе согласованного фильтра можно представить в виде свертки (см. фиг.1)
ξ(x) = ρ(x)**h(x)+n(x), (4)
где ρ(x) - входной сигнал или функция отражения цели;
h(x)= F(x)**hC(x) - импульсная характеристика радиолокационной системы или синтезированная ДНА;
F(x) - импульсная характеристика системы формирования траекторного сигнала;
hC(x) - импульсная характеристика согласованного фильтра;
n(x) - шум;
** - знак операции свертки.
Соотношение (4) можно трактовать следующим образом. На вход радиолокационной системы СИСТЕМА ФОРМИРОВАНИЯ ТРАЕКТОРНОГО СИГНАЛА ---> СОГЛАСОВАННЫЙ ФИЛЬТР поступает входной сигнал ρ(x) (где СИСТЕМА ФОРМИРОВАНИЯ ТРАЕКТОРНОГО СИГНАЛА включает в себя АНТЕННУ ---> ПРИЕМНИК ---> СИНХРОННЫЙ ДЕТЕКТОР). На выходе системы наблюдаем искаженный сигнал ξ(x). Степень искажения входного сигнала ρ(x) определяется длительностью импульсной характеристики системы h(x) и шумом n(х).
Под восстановлением сигнала понимается такая обработка искаженного сигнала ξ(x), которая позволяет получить функцию, наиболее близкую (по тому или иному критерию) к истинному входному сигналу ρ(x). Сущностью предлагаемого способа является нахождение оценки входного сигнала (функции отражения цели)  по искаженному сигналу ξ(x) (4) при известной импульсной характеристике радиолокационной системы h(x). To есть на основе знания импульсной характеристики системы создается восстанавливающий фильтр, устраняющий внесенное в процессе формирования и обработки траекторного сигнала искажение входного сигнала. Таким образом, метод восстановления сигнала основан на использовании априорной информации об искажении входного сигнала. Обработка искаженного сигнала осуществляется в частотной области, оценка спектра входного сигнала
по искаженному сигналу ξ(x) (4) при известной импульсной характеристике радиолокационной системы h(x). To есть на основе знания импульсной характеристики системы создается восстанавливающий фильтр, устраняющий внесенное в процессе формирования и обработки траекторного сигнала искажение входного сигнала. Таким образом, метод восстановления сигнала основан на использовании априорной информации об искажении входного сигнала. Обработка искаженного сигнала осуществляется в частотной области, оценка спектра входного сигнала  производится с помощью фильтрации Винера и выполняется восстанавливающим фильтром с передаточной функцией (Василенко Г.И. Теория восстановления сигналов: О редукции к идеальному прибору в физике и технике. - М.: Сов. радио, 1979, - стр. 113).
производится с помощью фильтрации Винера и выполняется восстанавливающим фильтром с передаточной функцией (Василенко Г.И. Теория восстановления сигналов: О редукции к идеальному прибору в физике и технике. - М.: Сов. радио, 1979, - стр. 113).
и
где * - означает комплексное сопряжение;
H(ω) - спектр импульсной характеристики h(х) радиолокационной системы;
Pn(ω), Pρ(ω) - энергетические спектры шума и входного сигнала ρ(x);
Ξ(ω) - спектр искаженного сигнала ξ(x) (4);
ω - круговая частота.
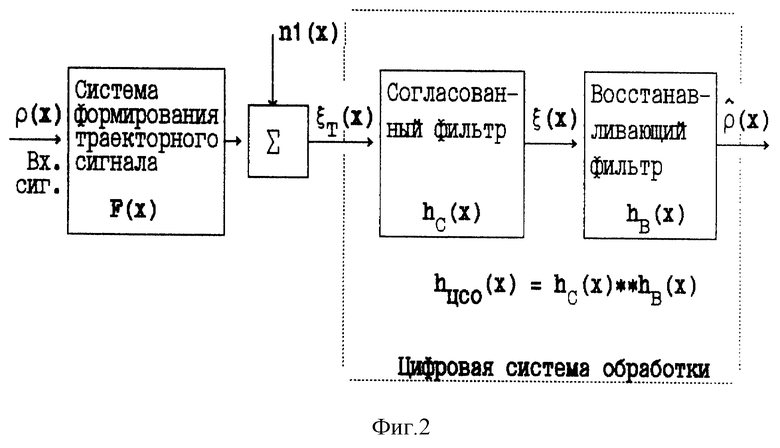
Согласованный и восстанавливающий фильтры являются линейными инвариантными к сдвигу системами и комплексный сигнал на выходе этих систем описывается выражением типа свертки. Из закона ассоциативности операции свертка в случае каскадного включения двух линейных инвариантных к сдвигу систем следует, что результирующая импульсная характеристика двух систем hЦСО(р) представляет собой свертку импульсных характеристик этих систем (см. фиг.2)
hЦСО(p)=hС(p)**hВ(p), (7)
где hЦСО(р) - импульсная характеристика блока цифровой системы обработки (ЦСО);
hС(p) - импульсная характеристика согласованного фильтра (1);
hВ(p) - импульсная характеристика восстанавливающего фильтра с частотной характеристикой (5);
р= 0, 1, 2, 3. . . - номер отсчета сигнала по азимутальной координате (дискретизация осуществляется с частотой зондирования в соответствии с импульсным режимом работы РЛС).
Следовательно, в конкретной реализации предполагаемого изобретения операции согласованной фильтрации траекторного сигнала и восстановление сигнала выполняются одновременно в блоке ЦСО с импульсной характеристикой hЦСО(р).
Процедура оценивания входного сигнала (или функции отражения цели)  для каждого канала дальности сводится к линейной свертке траекторного сигнала ξT(p) с соответствующей импульсной характеристикой блока ЦСО hЦСО(р). Линейная свертка двух последовательностей производится с использованием дискретного преобразования Фурье (ДПФ). С этой целью выполняется круговая свертка hЦСО(р) с ξT(p) и выделяется та часть круговой свертки, которая соответствует линейной свертке (Оппенгейм А. В., Шафер Р.В. Цифровая обработка сигналов. Пер. с англ. под ред. С.Я. Шаца. - М.: Связь, 1979, стр.88). Одно из свойств круговой свертки состоит в том, что при NО отсчетах входного сигнала и импульсной характеристики фильтра среди NO отсчетов выходного сигнала лишь один соответствует линейной свертке, то есть лишь один отсчет является "правильным", а все остальные - "неправильные". Для того чтобы получить N1≥1 отсчетов сигнала линейной свертки с помощью круговой свертки, число отсчетов входного сигнала необходимо расширить до величины NО+N1-1, увеличив при этом число отсчетов импульсной характеристики блока ЦСО до той же величины путем добавления нулевых по значению отсчетов. Поэтому для получения N1 отсчетов сигнала РЛИ в каждом канале дальности необходимо реализовать соотношение
для каждого канала дальности сводится к линейной свертке траекторного сигнала ξT(p) с соответствующей импульсной характеристикой блока ЦСО hЦСО(р). Линейная свертка двух последовательностей производится с использованием дискретного преобразования Фурье (ДПФ). С этой целью выполняется круговая свертка hЦСО(р) с ξT(p) и выделяется та часть круговой свертки, которая соответствует линейной свертке (Оппенгейм А. В., Шафер Р.В. Цифровая обработка сигналов. Пер. с англ. под ред. С.Я. Шаца. - М.: Связь, 1979, стр.88). Одно из свойств круговой свертки состоит в том, что при NО отсчетах входного сигнала и импульсной характеристики фильтра среди NO отсчетов выходного сигнала лишь один соответствует линейной свертке, то есть лишь один отсчет является "правильным", а все остальные - "неправильные". Для того чтобы получить N1≥1 отсчетов сигнала линейной свертки с помощью круговой свертки, число отсчетов входного сигнала необходимо расширить до величины NО+N1-1, увеличив при этом число отсчетов импульсной характеристики блока ЦСО до той же величины путем добавления нулевых по значению отсчетов. Поэтому для получения N1 отсчетов сигнала РЛИ в каждом канале дальности необходимо реализовать соотношение
где q= 0, 1, 2, . ..N1-1; N2=NO+N1-1. При этом, имеют в виду, что импульсная характеристика блока ЦСО h'ЦСО(k) включает hцсо(k) и (N1-1) дополнительных нулевых по значению отсчетов. В связи с тем что круговая свертка выполняется с использованием алгоритмов БПФ, ее называют быстрой сверткой.
Перейдем к рассмотрению РЛС бокового обзора, связанной единым изобретательским замыслом с вышеописанным способом углового разрешения цели.
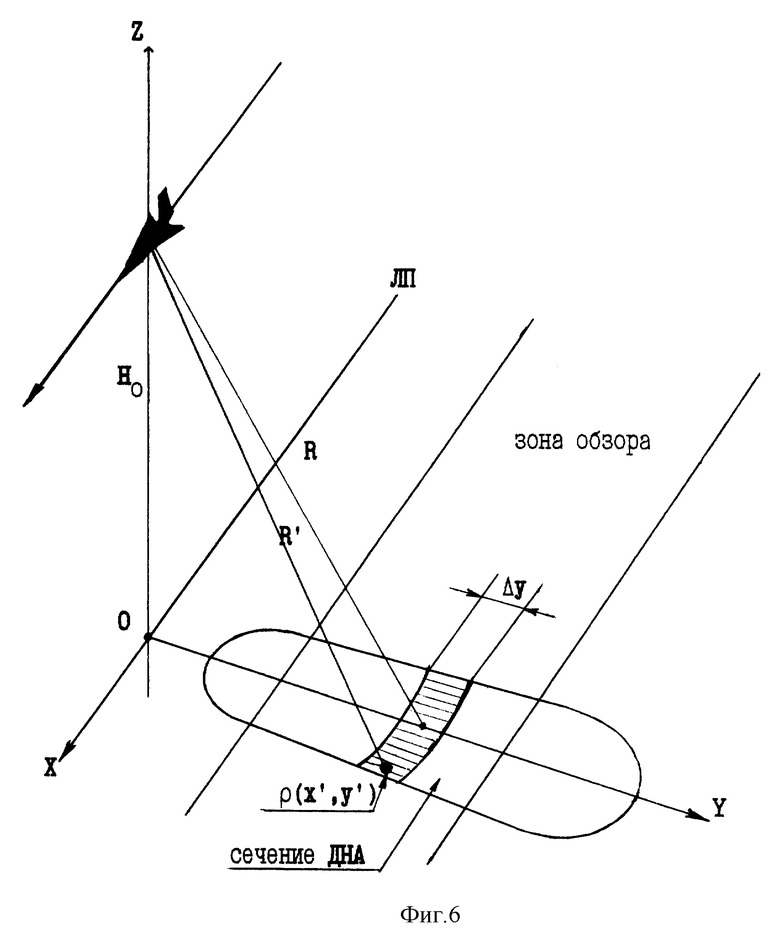
РЛС бокового обзора предназначена для получения радиолокационного изображения (РЛИ) земной поверхности. При этом ось диаграммы направленности реальной антенны располагается перпендикулярно линии движения летательного аппарата. Предполагается, что летательный аппарат перемещается равномерно и прямолинейно на неизменной высоте над земной поверхностью, которая считается плоской. Проекцию траектории полета летательного аппарата на земную поверхность называют линией пути. При боковом обзоре на некотором расстоянии от линии пути располагается полоса земной поверхности, представляющая собой зону радиолокационного обзора, границы которой параллельны линии пути. Взаимное положение летательного аппарата и зоны обзора в нормальной земной системе координат OXYZ, ось Х которой совпадает с линией пути летательного аппарата, а плоскость OXY - с земной поверхностью, показано на фигуре 6.
В известной РЛС бокового обзора (Реутов А.П., Михайлов Б.А., Кондратенков Г.С., Бойко Б.В. Радиолокационные станции бокового обзора. М.: Советское радио, 1970 г.) высокая угловая разрешающая способность по азимуту достигается за счет увеличения размера раскрыва антенны путем ее расположения вдоль фюзеляжа самолета.
Однако увеличить размеры антенны больше габаритов летательного аппарата таким способом практически не удается и разрешающая способность для целого ряда задач оказывается недостаточной.
Наиболее близкой по своей технической сущности к предлагаемому изобретению является РЛС бокового обзора с синтезированной апертурой антенны (Радиолокационные станции с цифровым синтезированием апертуры антенны /В.Н. Антипов, В. Т. Горяинов, А. Н. Кулин и др. Под ред. В.Т. Горяинова. - М.: Радио и связь, 1988 - стр.61).
Известная РЛС бокового обзора с СА состоит из двух частей: когерентного приемопередающего тракта и цифровой системы обработки (ЦСО) сигналов. Радиолокационный приемопередатчик, установленный на движущемся носителе, дает на выходе сигналы, отраженные от целей, с сохранением информации об их фазовой структуре (Справочник по радиолокации. Под ред. М. Сколника, 1970. Пер. с англ. под общей ред. К.Н. Трофимова. Том 2. Радиолокационные антенные устройства. Под ред. П.И. Дудника. - М., Советское радио, 1977, стр.342). Цифровая система обработки осуществляет когерентное суммирование этих сигналов от каждой цели за время пролета носителем участка траектории, равного искусственному раскрыву антенны.
Однако в реальной системе не удается достичь теоретического значения предельного углового разрешения по азимуту, равного D/2 (где D - горизонтальный размер апертуры реальной антенны), по двум причинам:
1. Из-за дестабилизирующих факторов практически трудно осуществить обработку на всей максимально возможной длине синтезированной апертуры Lm, что накладывает ограничение на фактический размер синтезированной апертуры L (L<Lm).
2. Использование при обработке методики сжатия именно импульсов с линейной частотной модуляцией приводит к ограничению предельного размера синтезируемой апертуры L<<RO, где RO - расстояние между летательным аппаратом и целью, при t=0.
Следовательно, из-за ограничений на размер СА в реальных РЛС невозможно получить идеально четкое изображение земной поверхности.
Задачей предлагаемого изобретения является повышение угловой разрешающей способности РЛС бокового обзора.
Решение поставленной задачи достигается тем, что в радиолокатор бокового обзора, содержащий гетеродин, генератор промежуточной частоты, первый смеситель, входы которого соединены с соответствующими выходами гетеродина и генератора промежуточной частоты, усилитель мощности, вход которого подключен к выходу первого смесителя, усилитель высокой частоты, антенну, соединенную через антенный переключатель с выходом усилителя мощности и входом усилителя высокой частоты, второй смеситель, первый вход которого соединен с выходом усилителя высокой частоты, а второй вход - с выходом гетеродина, усилитель промежуточной частоты, вход которого соединен с выходом второго смесителя, два фазовых детектора, первые входы которых соединены с выходом усилителя промежуточной частоты, второй вход первого фазового детектора - с выходом генератора промежуточной частоты, второй вход второго фазового детектора через фазовращатель на π/2 радиан - с выходом генератора промежуточной частоты, два аналого-цифровых преобразователя, входы которых соединены с соответствующими выходами фазовых детекторов, согласованный фильтр, входы которого соединены с соответствующими выходами аналого-цифровых преобразователей, блок вычисления модуля сигнала, цифровую систему индикации, вход которого подключен к выходу блока вычисления модуля сигнала, дополнительно введен восстанавливающий фильтр вход которого соединен с выходом согласованного фильтра, а выход - с входом блока вычисления модуля сигнала.
На фигуре 1 приведена блок-схема алгоритма предлагаемого способа, где:
ξ(x) = ρ(x)**h(x)+n(x) - траекторный сигнал на выходе согласованного фильтра; оценка входного сигнала;
оценка входного сигнала;
h(x)= F(х)**hC(х) - импульсная характеристика радиолокационной системы или синтезированная ДНА;
n(x)=n1(x)**hC(x) - шум на выходе согласованного фильтра;
n1(х) - белый шум на входе согласованного фильтра (см. фиг.3);
- передаточная функция или спектр импульсной характеристики hВ(x) восстанавливающего фильтра;
H(ω) - спектр импульсной характеристики h(x) радиолокационной системы;
Pn(ω), Pρ(ω) - энергетические спектры шума и входного сигнала;
** - знак операции свертки.
На фигуре 2 - эквивалентная схема алгоритма, где:
ξT(x) = ρ(X)**F(x)+n1(x) - траекторный сигнал;
n1(х) - белый шум;
ξ(x) = ξT(x)**hC(x) - сигнал на выходе согласованного фильтра; оценка входного сигнала;
оценка входного сигнала;
hЦСО(х)= hС(x)**hВ(x) - импульсная характеристика цифровой системы обработки сигнала;
F(x) - импульсная характеристика системы формирования траекторного сигнала;
hC(х) - импульсная характеристика согласованного фильтра;
hB(x) - импульсная характеристика восстанавливающего фильтра;
** - знак операции свертки.
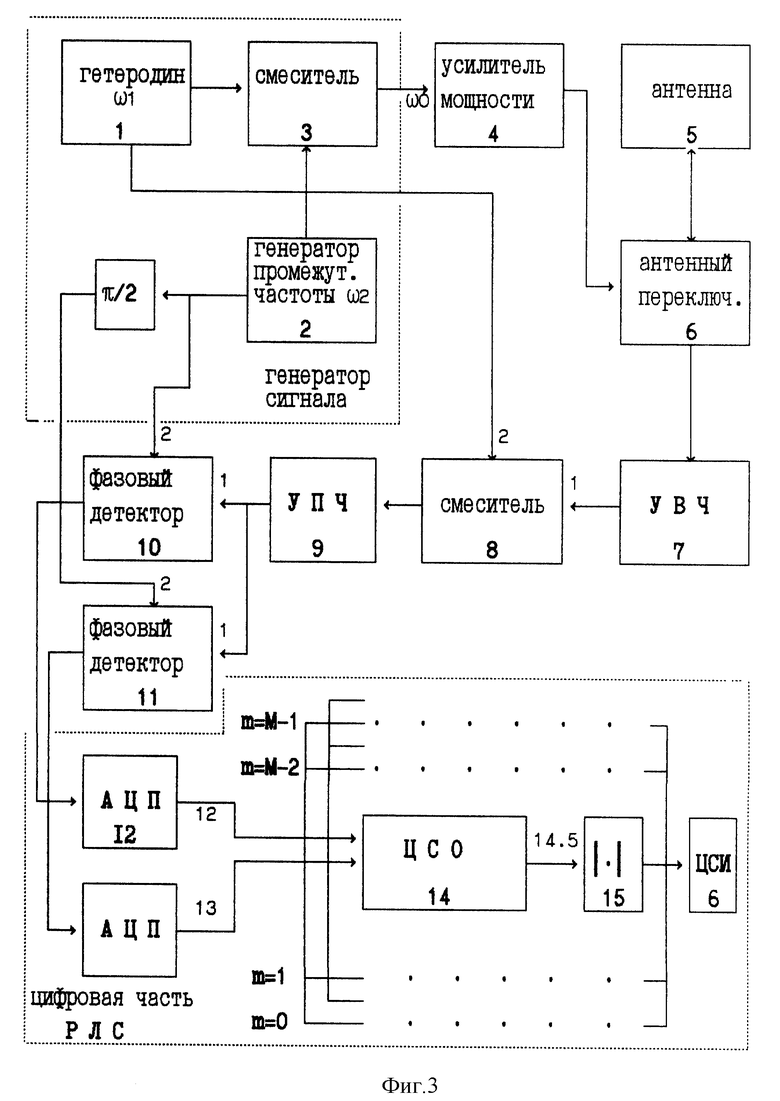
На фигуре 3 представлена структурная схема РЛС бокового обзора, реализующая предложенный способ.
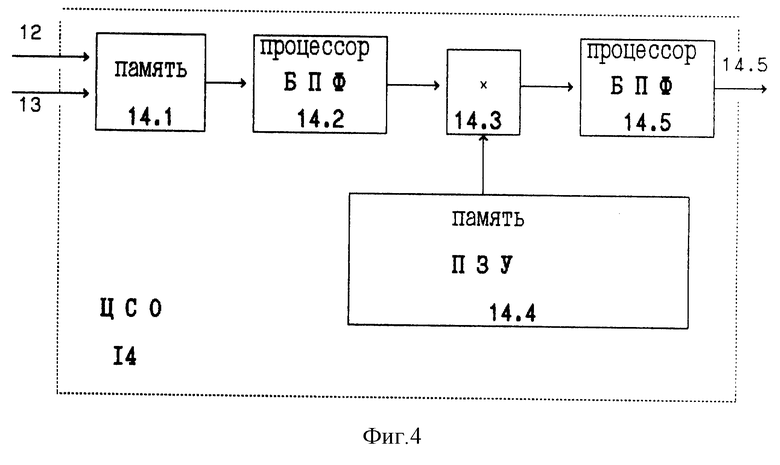
На фигуре 4 приведена структурная схема цифровой системы обработки сигнала, где:
14.1 - оперативная память;
14.2 - процессор прямого БПФ;
14.3 - блок перемножения;
14.4 - постоянная память, где хранятся отсчеты передаточной функции блока ЦСО;
14.5 - процессор обратного БПФ.
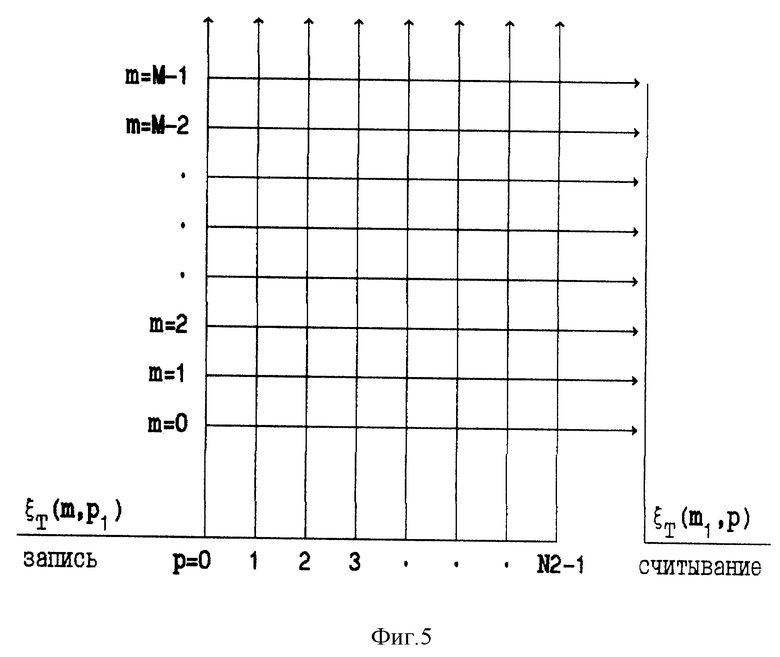
На фигуре 5 представлена схема расположения отсчетов сигнала в оперативной памяти цифровой системы обработки.
На фигуре 6 изображена система координат и схема бокового обзора, где:
ЛП - линия пути;
hо - высота носителя РЛС над землей;
Δy - размер участка земной поверхности, соответствующий длительности зондирующего импульса;
ρ(x′,y′) - входная функция или функция отражения цели.
На фигуре 3 представлена структурная схема РЛС бокового обзора. РЛС бокового обзора содержит (см. фиг.3) два высокостабильных генератора - гетеродин I, выполняющий функции местного гетеродина с частотой генерации ωI, и генератор 2, выполняющий функцию опорного генератора промежуточной частоты ω2, смеситель 3, усилитель мощности 4, антенну 5, антенный переключатель 6, усилитель высокой частоты (УВЧ) 7, смеситель 8, усилитель промежуточной частоты (УПЧ) 9, два фазовых детектора (ФД) ФД10 и ФД11, два аналого-цифровых преобразователя (АЦП) АЦП12 и АЦП13, цифровую систему обработки сигналов 14, блок 15 вычисления модуля сигнала, цифровую систему индикации (ЦСИ) 16.
Цифровая система обработки сигнала 14 содержит (см. фиг.4) оперативную память 14.1, процессор прямого быстрого преобразования Фурье (БПФ) 14.2, умножитель 14.3, постоянное запоминающее устройство (ПЗУ) 14.4, где хранятся отсчеты передаточной функции блока ЦСО, процессор обратного БПФ 14.5.
РЛС бокового обзора работает следующим образом:
Выходные сигналы гетеродина 1 и генератора 2 подаются в смеситель 3, который на выходе имеет составляющие суммарных и разностных частот. Отфильтрованный сигнал суммарной частоты (ω0 = ω1+ω2) подается далее на усилитель мощности 4, где зондирующий сигнал усиливается до требуемого уровня и подается в антенну 5 через антенный переключатель 6. Отраженные от цели сигналы улавливаются антенной 5 и поступают на вход УВЧ7 через антенный переключатель 6. Сигналы с выхода УВЧ7 подаются на смеситель 8, где они смешиваются с сигналом местного гетеродина 1, в результате чего получается сигнал разностной частоты ω2. Последний усиливается в УПЧ9 и подается на два фазовых детектора ФД10 и ФД11, на соответствующие входы которых поступают также сигналы от опорного генератора 2 промежуточной частоты ω2, эти сигналы сдвинуты по фазе на π/2 радиан друг относительно друга. Выходные сигналы фазовых детекторов можно рассматривать как действительную и мнимую составляющие комплексной огибающей отраженного сигнала. Видеосигнал с выходов фазовых детекторов ФД10 и ФД11 поступают на соответствующие входы АЦП12 и АЦП13, где производится преобразование аналоговых сигналов в цифровые. Квадратурные составляющие комплексного сигнала ξT(m,p) = ξC(m,p)+j•ξS(m,p) с выходов АЦП12 и АЦП13 в каждом периоде зондирования р распределяются по М каналам дальности в соответствии с номером отсчета по дальности m. Далее в каждом m-ом канале дальности реализуется соотношение (8). Предварительно отсчеты комплексного сигнала ξT(m,p) записывают в память 14.1 (см. фиг.4). Если эту память рассматривать для М каналов (см. фиг.5), то запись сигнала в такую общую память производится строками по дальности. В этой памяти хранится массив отсчетов накопленных за N2 (N2=NO+N1-1) периодов зондирования. Считывание сигнала из этой памяти для обработки производится строкой по азимуту. То есть для решения задачи восстановления сигнала в каждом m-м канале дальности считывается из памяти N2-отсчетов траекторного сигнала. Эти N2-отсчетов комплексного сигнала ξT(m,p) поступают в процессор БПФ 14.2 (см. фиг. 4), на выходе которого формируется N2 отсчетов сигнала ДПФ. Импульсная характеристика блока 14 ЦСО hЦСО(р), содержащая N0 ненулевых отсчетов, дополняется N1-1 числом нулевых отсчетов, заранее преобразуется с помощью процессора БПФ в N2 отсчетов сигнала ДПФ и хранится в постоянной памяти 14.4 в виде комплексных коэффициентов. Далее ДПФ сигнала и импульсной характеристики блока 14 ЦСО перемножаются, и результат перемножения поступает в процессор БПФ, который осуществляет обратное ДПФ. В результате вычисления модуля комплексного сигнала, поступающего с выхода процессора БПФ 14.5, образуется N2 отсчетов выходного сигнала блока 15 (см. фиг.3), из которых лишь первые N1 отсчетов являются "правильными", то есть сигналом РЛИ. Эти отсчеты цифрового сигнала направляются в цифровую систему индикации. Строка РЛИ складывается из групп отсчетов, каждая из которых образуется за один цикл обработки, состоит из N1 отсчетов и по существу формируется на перекрывающихся интервалах обработки. После образования группы из N1 отсчетов по мере полета носителя РЛС N1 новых отсчетов сигнала "вытесняют" из оперативной памяти блока 14 ЦСО столько же устаревших, и цикл обработки повторяется. Если рассматривать при этом все М каналов по дальности, то становится ясно, что РЛИ формируется кадрами в N1 отсчетов по азимуту и М отсчетов по дальности. По мере полета носителя РЛС парциальные кадры выстраиваются в полосу.
Блок 14 цифровой системы обработки может быть реализован на основе программно-управляемого процессора фирмы RCA (США) [Радиолокационные станции с цифровым синтезированием апертуры антенны / В.Н. Антипов, В.Т. Горяинов, А. Н. Кулин и др.; Под ред. В.Т. Горяинова. - М.: Радио и связь, 1988 - стр. 211].
Поскольку уравнение (4) также описывает процесс формирования амплитуды отраженного сигнала для каждого канала дальности при круговом обзоре воздушного пространства, то предложенный способ можно использовать и в этом случае. Традиционно оценка функции отражения цели находится посредством согласованного фильтра для пачки импульсов, который представляет собой последовательное включение согласованного фильтра для одиночного импульса пачки и накопителя с весовым суммированием (Финкельштейн М.И. Основы радиолокации. - М. : Радио и связь, 1983). Оптимальная обработка пачки импульсов с помощью согласованного фильтра осуществляется в два этапа: внутрипериодная обработка, происходящая в согласованном фильтре для одиночных импульсов пачки, и межпериодная обработка в накопителе. Накопитель обеспечивает в момент окончания ТО суммирование всей группы импульсов с соответствующими весовыми коэффициентами. В частности, при круговом обзоре эти коэффициенты равны соответствующим значениям отсчетов ДНА F(р) (Финкельштейн М.И. Основы радиолокации. - М.: Радио и связь, 1983, стр.208). Таким образом, при согласованной фильтрации пачки импульсов угловое разрешение по азимуту определяется шириной автокорреляционной функции ДНА. Поскольку ширина автокорреляционной функции ДНА незначительно отличается от ширины ДНА по половинной мощности, то согласованная фильтрация для пачки импульсов практически используется для повышения отношения сигнал/шум, а не для повышения углового разрешения. Ясно, что использование теории восстановления сигналов для оценки функции отражения воздушной цели является более эффективным. Таким образом, предложенный способ можно использовать для повышения углового разрешения наземных РЛС, что позволит значительно сократить затраты на проектирование и изготовление антенн для РЛС с заданными техническими характеристиками.
С целью проверки предлагаемого способа углового разрешения цели были проведены численные эксперименты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗРЕШЕНИЯ ЦЕЛЕЙ ПО ДАЛЬНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И ИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СЖАТИЕМ ИМПУЛЬСОВ И ВОССТАНОВЛЕНИЕМ СИГНАЛОВ | 2004 |
|
RU2296345C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2151407C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| ВЕРТОЛЕТНАЯ ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2191401C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И КВАЗИНЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2012 |
|
RU2510685C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2194288C2 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2531255C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2001 |
|
RU2206903C2 |
| Радиолокационная станция кругового обзора | 2018 |
|
RU2691129C1 |
Изобретение относится к области радиолокации и может быть использовано для углового разрешения цели наземных и бортовых радиолокационных станций при обзоре воздушного пространства или поверхности Земли. При этом производится излучение зондирующих импульсов, прием отраженных сигналов, запоминание их, согласованная фильтрация запомненных сигналов, обнаружение цели и оценивание ее углового положения, согласно изобретению до обнаружения цели осуществляется апостериорная обработка отфильтрованных сигналов путем восстановления входного сигнала. Сущностью изобретения является нахождение оценки входного сигнала по искаженному сигналу на основании априорной информации об искажении входного сигнала. Достигаемым техническим результатом является повышение угловой разрешающей способности наземных и бортовых РАС при обзоре пространства и поверхности Земли. 2 с. и 2 з.п. ф-лы, 6 ил.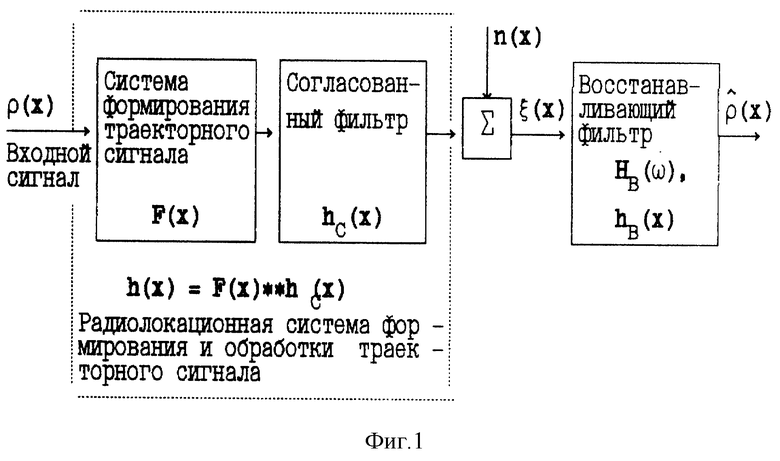
h(x)= hC(x)**hB(x),
где hC(x) - импульсная характеристика согласованного фильтра;
hВ(x) - импульсная характеристика восстанавливающего фильтра;
** - знак операции свертки.
| АНТИПОВ В.А | |||
| и др | |||
| Радиолокационные станции с цифровым синтезированием апертуры антенны | |||
| - М.: Радио и связь, 1988, с | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| US 4616227, 07.10.1986 | |||
| Устройство для формирования пакетов шестигранной формы из штучных цилиндрических грузов | 1976 |
|
SU576264A1 |
| RU 2066060 C1, 27.08.1996. | |||

