Изобретение относится к медицинским ультразвуковым диагностическим системам и в частности к ультразвуковым системам, которые выполняют измерения жесткости или упругости тканей с использованием поперечных (сдвиговых) волн.
Были разработаны различные средства удаленного исследования механических свойств ткани для диагностических целей, которые используют силу излучения ультразвукового пучка для удаленного приложения силы к области ткани в теле пациента (сила акустического излучения; также называются «толкающими» импульсами). Сила акустического излучения может быть приложена таким образом, что можно будет измерить упругие свойства, либо визуально различить области различной жесткости локально в точке деформации путем отслеживания деформации непосредственно с помощью дальнейшей ультразвуковой визуализации, чтобы следовать модели деформации квазистатически. См., например, публикацию Nightingale, K.R. et al, “On the feasibility of remote palpation using acoustic radiation force”, J. Acoust. Soc. Am., vol. 110 no. 1 (2001), pp. 625-34; и M.L Palmieri и соавт. Деформация, вызванная силой акустического излучения, также может быть использована в качестве источника поперечных волн, распространяющихся в сторону от зоны деформации, которые затем могут быть отображены для исследования соседних областей на их материальные свойства посредством визуализации скорости поперечных волн во временной области. См. в этой связи публикации Sarvazyan, A. et al., “Shear wave elasticity imaging: A new ultrasonic technology of medical diagnostics”, Ultrasound Med. Biol. 24, pp 1419-1435 (1998) и ”Quantifying Hepatic Shear Modulus In Vivo Using Acoustic Radiation Force”, Ultrasound in Med. Biol., vol. 34, 2008. Этот способ также может быть использован для оценки частотной области, волнового модуля сдвига и вязкости. См. публикацию Fatemi, M. et al., “Ultrasound-stimulated vibro-acoustic spectrography”, Science 280, pp 82-85 (1998). Эти способы используют одномерный массив излучателей для формирования поперечных волн и, таким образом, связаны ограниченной эффективной глубиной проникновения и сочетанием слабой связи и ограничений безопасности, налагаемых на максимальную мощность возбуждающих лучей, в сочетании с неблагоприятными эффектами дифракции, которые ограничивают глубину проникновения для эффективного измерения. См. публикацию Bouchard, R. et al., “Image Quality, Tissue Heating, and Frame Rate Trade-offs in Acoustic Radiation Force Impulse Imaging”, IEEE Trans. UFFC 56, pp 63-76 (2009).
В дополнение к этому, существующие способы из-за ограниченной степени толкающего импульса возбуждения и двумерной методологии визуализации не способны различить те области изменения свойств, которые находятся в плоскости визуализации, и те области, которые могут находиться рядом, но вне плоскости. Смешение этих значений свойств вне плоскости визуализации со значениями в плоскости визуализации во время процесса визуализации может привести к ненужному снижению точности и диагностической ценности на выходе этих способов.
В обычной визуализации и количественных измерениях с использованием силы акустического излучения, практикуемых в настоящее время, толчок формируется одномерным массивом, который производит луч, который может легко контролироваться в одной плоскости визуализации, но ограничен одним, небольшой величины, фокусом в пересекающей плоскости, или плоскости возвышения, фиксированным фокусом механического объектива. Это приводит к механической силе толчка, который создает боковой ответ во всех направлениях, в и из плоскости массива. Движение ткани, вызванное этим толчком, распространяется в основном радиально во всех боковых направлениях, и затухает с коэффициентом 1/R в радиальных направлениях (в случае линейного источника в направлении толкающего импульса) в дополнение к нормальному затуханию, вызванному вязкостью ткани. В случае качественной и количественной визуализации с использованием силы акустического излучения это вредно, потому что области изменения жесткости, находящиеся вне плоскости, будут способствовать осевому смещению в плоскости изображения, снижая точность измерения жесткости в плоскости изображения. В случае количественного измерения радиальное распространение распределяет полезную энергию поперечной волны наружу из плоскости изображения, уменьшая амплитуду сигнала, необходимого для точной оценки свойств.
Движение, производимое передачей силы акустического излучения в допустимых пределах ограничений по диагностическому излучению, очень мало, в диапазоне от 0,1 до 15 мкм по амплитуде. Измерение таких малых движений осуществляется путем отслеживания отражений от локальных неоднородностей в изучаемой ткани, что означает, что влияние поперечной волны на принимаемый сигнал может быть трудно различить. В дополнение к этому, движение поперечной волны сильно затухает в ткани, которая является вязкоупругой по своей природе. Таким образом, адекватное отношение сигнала к шуму трудно получить, и диапазон проникновения очень ограничен. Любые интерферирующие сигналы отрицательно сказываются на результатах. Важным источником помех является относительное движение датчика, используемого для изучения, и изучаемой области ткани. Это может быть вызвано внешними источниками, такими как дрожание руки оператора, или внутренними источниками, такими как дыхание, сердцебиение, или другие вольные или невольные движения объекта. Попытки улучшения соотношения сигнал-шум для способов использования силы акустического излучения из уровня техники использовали полосовую фильтрацию сигналов для устранения низких частот из данных. Большинство артефактов движения имеют частоту ниже 50 Гц, так что может быть сделано некоторое улучшение. См., например, публикацию Urban et al, “Error in Estimates of Tissue Material Properties from Shear Wave Dispersion Ultrasound Vibrometry,” IEEE Trans. UFFC, vol. 56, No. 4, (Apr. 2009). Тем не менее, некоторые из этих помех являются довольно большими по амплитуде, и полосовой фильтрации не всегда достаточно, чтобы исключить неблагоприятные влияния. Артефакты в виде неправильной оценки смещений и, следовательно, неверно рассчитанных скоростей и модулей поперечных волн являются общими.
Соответственно, задача настоящего изобретения состоит в улучшении эффективной глубины проникновения эффектов силы акустического излучения, таких как поперечные (сдвиговые) волны. Еще одна задача настоящего изобретения состоит в уменьшении внеплоскостных влияний во время оценки материала. Еще одна задача настоящего изобретения состоит в уменьшении погрешности измерений, связанной с относительным движением датчика в исследованиях, основанных на силе акустического излучения.
В соответствии с принципами настоящего изобретения описаны диагностическая ультразвуковая система визуализации и способ, которые позволяют пользователю получать данные изображения с высоким разрешением, достаточным для измерения движения ткани или характеристик поперечной волны, распространяющейся через ткань. Ультразвуковой зонд с двумерным массивом преобразовательных элементов передает толкающий импульс в виде широкой полосы энергии в ткань. Широкая полоса энергии может быть плоской или неплоской, и может быть получена с помощью последовательности индивидуально передаваемых импульсов ультразвука или путем передачи плоского волнового фронта. В отличие от одиночных векторных толкающих импульсов из уровня техники, двумерный толкающий импульс широкой полосы энергии производит плоский или полуплоский волновой фронт сдвига, который не страдает от затухания распространения энергии с коэффициентом 1/R, свойственного уровню техники. В соответствии с еще одним аспектом настоящего изобретения множество фоновых импульсов отслеживания передаются в область вокруг местоположения толкающего импульса и интересующей области, в которой поперечная волна должна быть обнаружена. Эхо-сигналы, полученные от фоновых импульсов отслеживания, коррелируются с течением времени для оценки фонового движения в интересующей области при распространении сдвиговой волны, что используется для корректировки измеренного смещения, вызванного прохождением поперечной волны.
НА ПРИВЕДЕННЫХ ЧЕРТЕЖАХ:
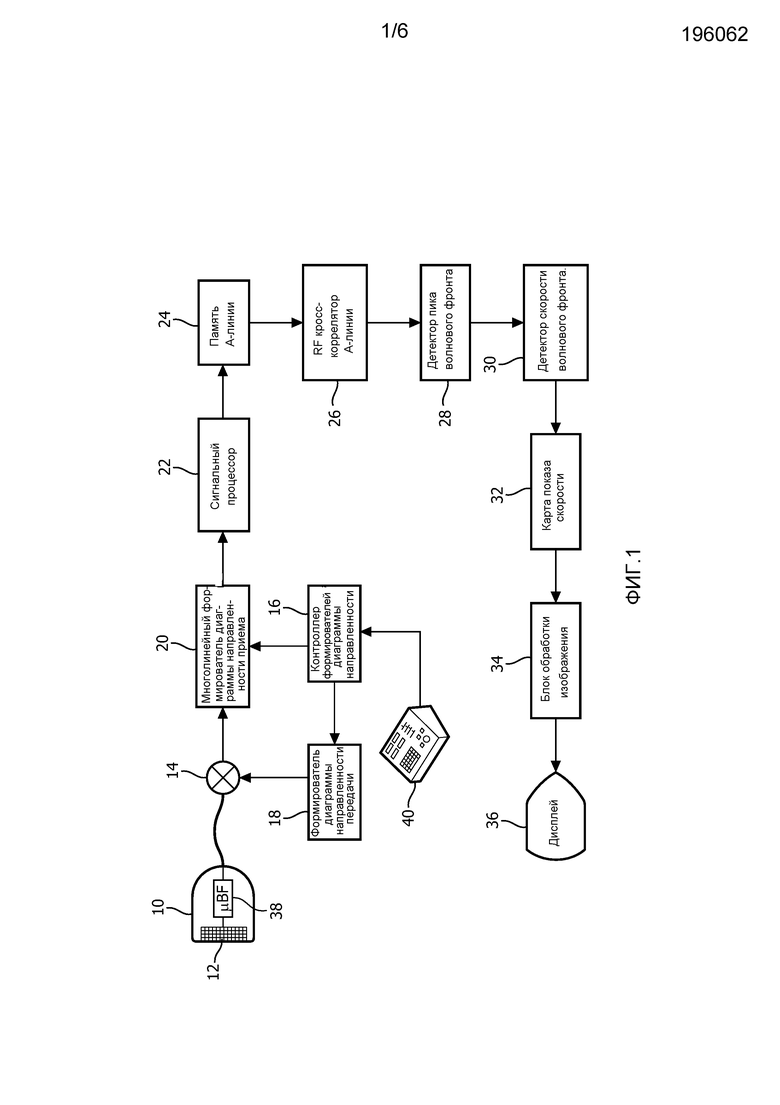
Фиг. 1 иллюстрирует в виде блок-схемы ультразвуковую диагностическую систему визуализации, выполненную в соответствии с принципами настоящего изобретения.
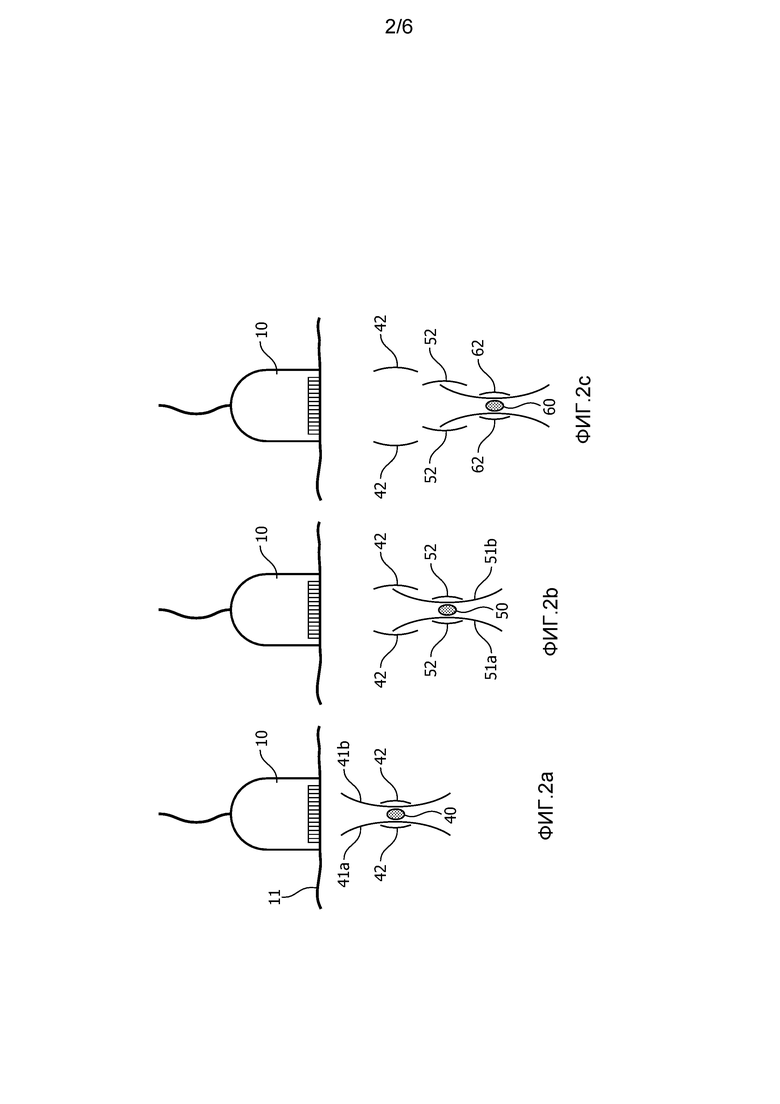
Фиг. 2a-2с иллюстрируют передачу последовательности толкающих импульсов на различную глубину, чтобы произвести волновой фронт поперечной волны.
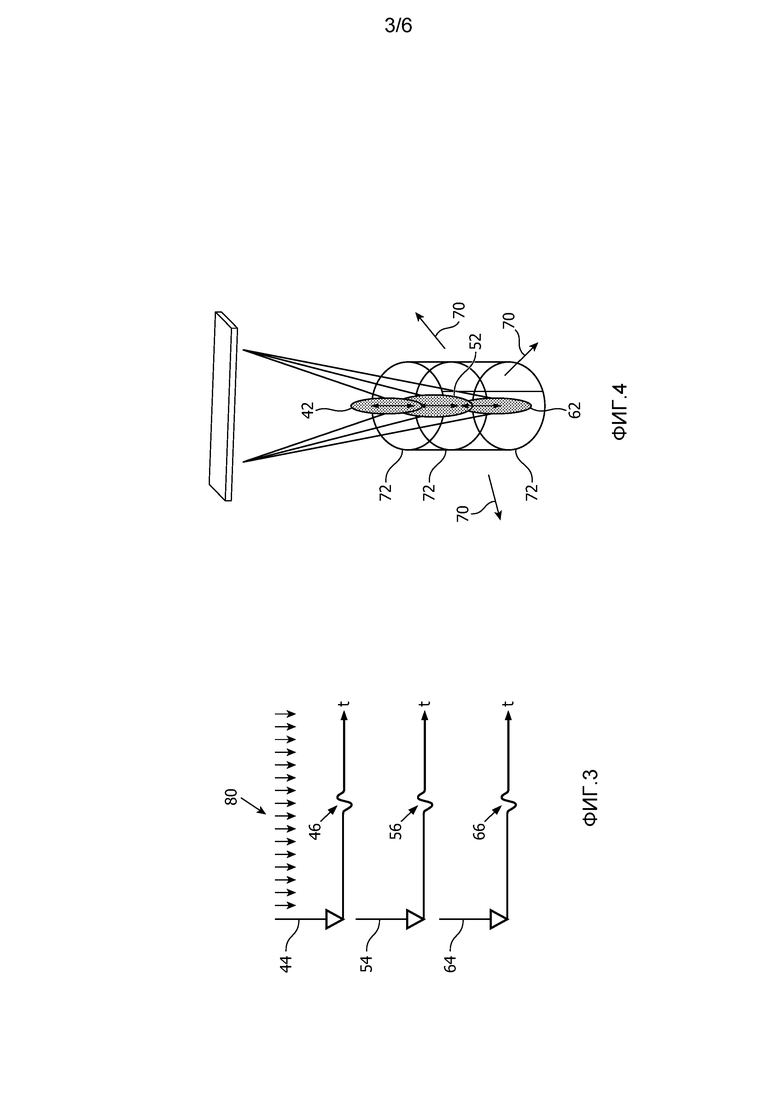
Фиг. 3 пространственно иллюстрирует последовательность импульсов вдоль вектора толкающего импульса, полученный волновой фронт поперечной волны, а также серии векторов импульсов отслеживания.
Фиг. 4 иллюстрирует радиальное распространение волнового фронта поперечной волны, исходящей из вектора толкающего импульса.
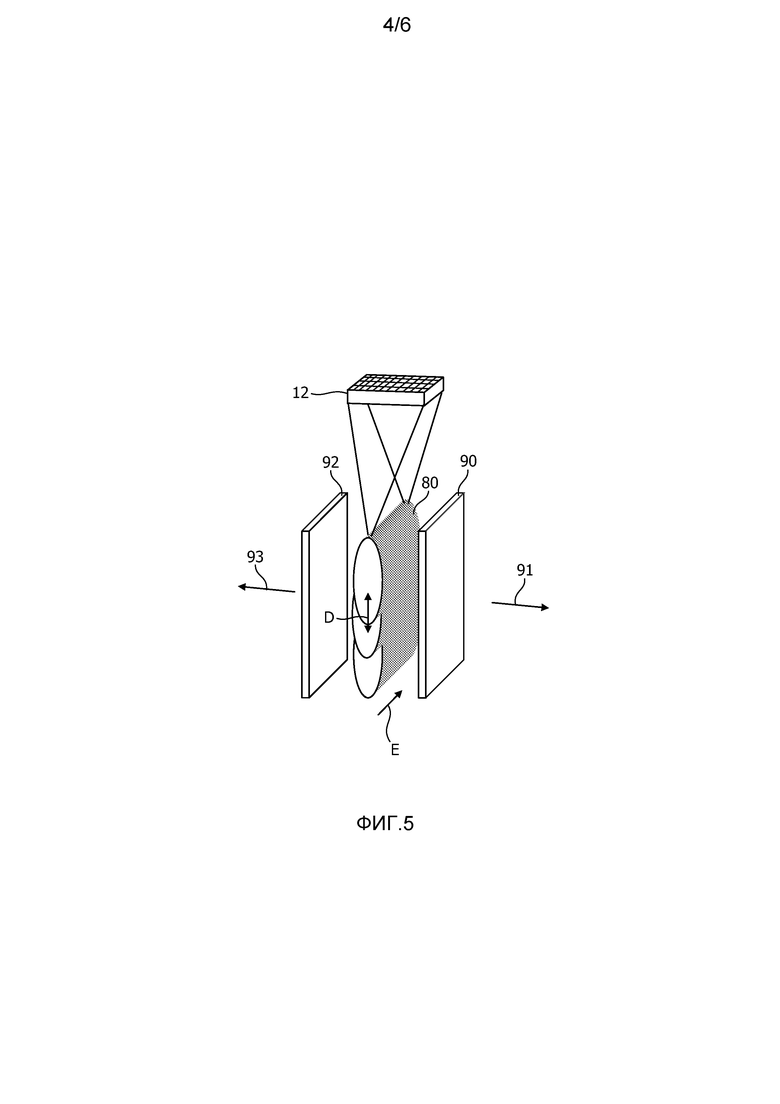
Фиг. 5 иллюстрирует двумерный толкающий импульс, полученный в соответствии с принципами настоящего изобретения.
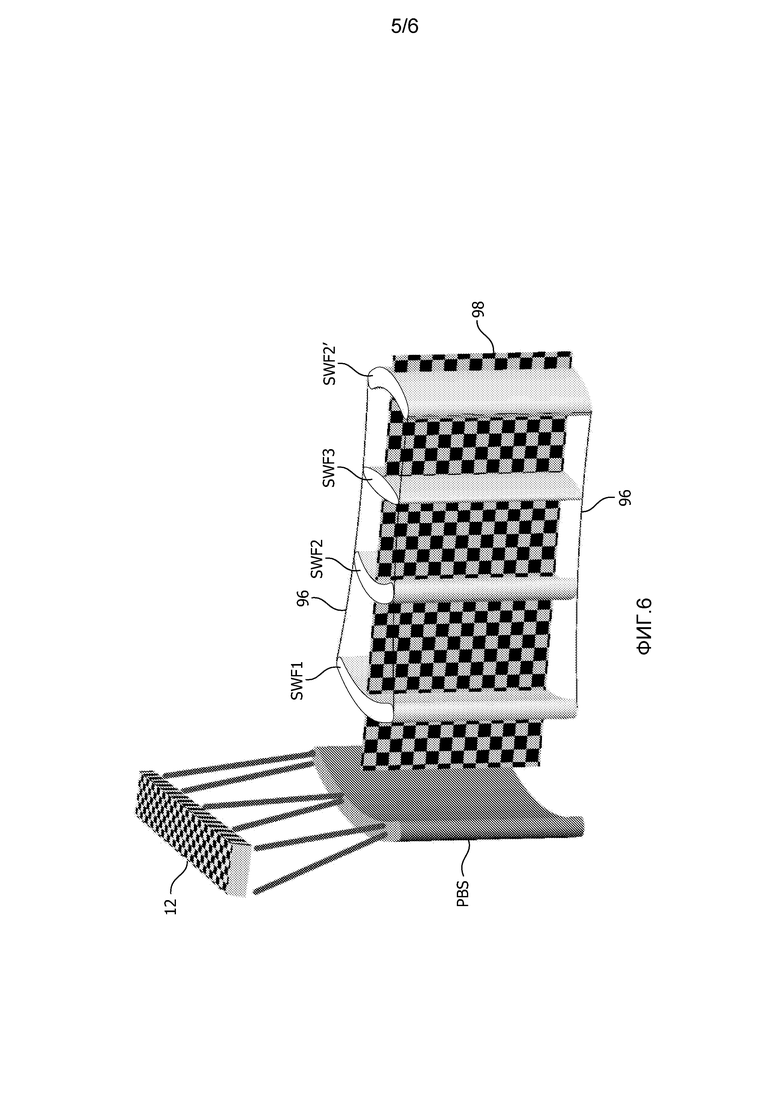
Фиг. 6 иллюстрирует криволинейный двумерный толкающий импульс, полученный в соответствии с принципами настоящего изобретения.
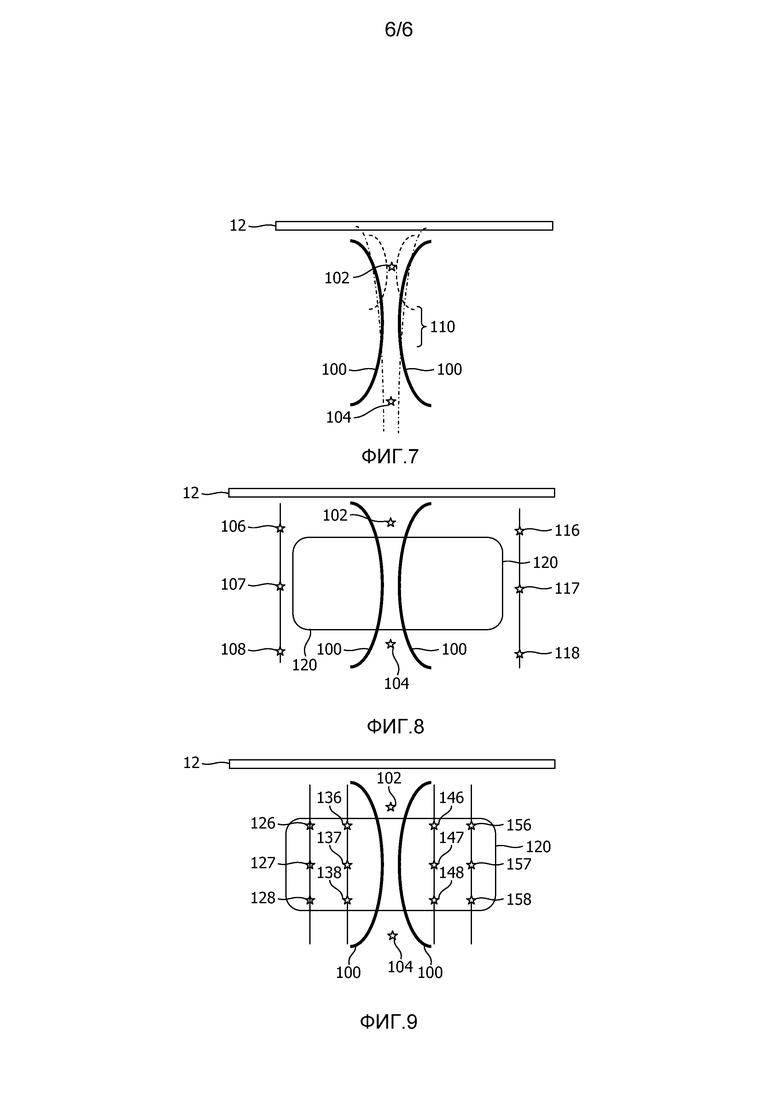
Фиг. 7-9 иллюстрируют использование фоновых импульсов отслеживания для оценки фонового движения ткани в области поперечной волны в соответствии с принципами настоящего изобретения.
Обращаясь сначала к Фиг. 1, ультразвуковая система, построенная в соответствии с принципами настоящего изобретения для измерения поперечных волн, показана в виде блок-схемы. Ультразвуковой зонд 10 имеет двумерный массив 12 преобразовательных элементов для передачи и приема ультразвуковых сигналов. Двумерный массив преобразователей может сканировать двумерную (2D) плоскость передачи посредством излучения пучков и приема возвращающихся эхо-сигналов по одной плоскости в организме, а также может быть использован для сканирования объемной области путем излучения пучков в различных направлениях и/или плоскостях объемной (3D) области тела. Элементы массива соединены с расположенным внутри зонда микроформирователем 38 диаграммы направленности, который контролирует передачу элементами и обрабатывает эхо-сигналы, получаемые от групп или подмассивов элементов в сигналы с частично сформированной диаграммой направленности. Сигналы с частично сформированной диаграммой направленности подаются из зонда в многолинейный формирователь 20 диаграммы направленности приема в ультразвуковой системе переключателем 14 приема/передачи (T/R). Координацией передачи и приема формирователями диаграммы направленности управляет контроллер 16 формирователей диаграммы направленности, соединенный с многолинейным формирователем диаграммы направленности приема и с контроллером 18 передачи, который подает управляющие сигналы на микроформирователь диаграммы направленности. Контроллер формирователей диаграммы направленности реагирует на сигналы, производимые в ответ на манипуляции пользователя с пользовательской панелью 40 управления для управления работой ультразвуковой системы и ее зонда.
Многолинейный формирователь 20 диаграммы направленности приема создает множество пространственно различающихся линий приема (А-линий) эхо-сигналов в течение одного интервала приема-передачи. Эхо-сигналы обрабатываются на предмет фильтрации, уменьшения шума и т.п. сигнальным процессором 22, а затем сохраняются в памяти 24 А-линии. Различающиеся по времени отсчеты А-линии, относящиеся к одному пространственному положению вектора, связываются друг с другом в ансамбль эхо-сигналов, относящихся к общей точке в поле изображения. RF эхо-сигналы последовательной выборки А-линии того же пространственного вектора кросс-коррелируются RF кросс-коррелятором 26 А-линии для получения последовательности отсчетов смещения ткани для каждой точки отсчета на векторе. В качестве альтернативы, А-линии пространственного вектора могут быть допплеровски обработаны для обнаружения движения поперечной волны вдоль вектора, либо могут быть использованы другие фазочувствительные способы, такие как отслеживание спеклов во временной области. Детектор 28 пика волнового фронта реагирует на обнаружение смещения поперечной волны вдоль вектора А-линии для обнаружения пика смещения поперечной волны в каждой точке отсчета на А-линии. В предпочтительном варианте осуществления это делается путем построения кривой, хотя кросс-корреляция и другие интерполяционные способы также могут быть использованы при желании. Момент времени, в который достигается пик смещения поперечной волны, отмечается в отношении времен того же самого события в других положениях А-линии, все по отношению к общему отсчету времени, и эта информация поступает на детектор 30 скорости волнового фронта, который дифференциально вычисляет скорость поперечной волны из времен пика смещения на соседних А-линиях. Эта информация о скорости поступает в карту 32 отображения скорости, которая указывает скорость поперечной волны в пространственно различных точках в двумерной и трехмерной области изображения. Карта показа скорости соединена с блоком 34 обработки изображения, который обрабатывает карту скорости, предпочтительно перекрывая анатомическое ультразвуковое изображение ткани, для отображения на дисплее 36 изображения.
Фиг. 2a-2с иллюстрируют передачу последовательности сфокусированных толкающих импульсов с высоким значением MI (например, MI 1,9 или менее, так, чтобы быть в диагностических пределах, установленных FDA) вдоль одного направления вектора для получения волнового фронта поперечной волны. Импульсы с высоким значением MI и большой длительностью используются так, чтобы передавалось достаточное количество энергии, чтобы сместить ткани вниз вдоль вектора передачи и вызвать развитие поперечной волны. На Фиг. 2a зонд 10 на поверхности 11 кожи передает первый толкающий импульс 40 в ткань с профилем 41a, 41b пучка к заданной глубине фокуса, обозначенной заштрихованной областью 40. Этот толкающий импульс будет смещать ткань, находящуюся в фокусе, вниз, в результате чего волновой фронт 42 поперечной волны будет исходить наружу от смещенной ткани.
Фиг. 2b иллюстрирует второй толкающий импульс 50, передаваемый зондом 10 вдоль того же самого вектора и фокусируемый на большей глубине, обозначенной заштрихованной областью 50. Этот второй толкающий импульс 50 смещает ткань, находящуюся в фокусе, вызывая волновой фронт 52 поперечной волны, исходящий наружу от смещенной ткани. Таким образом, оба волновых фронта 42 и 52 поперечных волн распространяются в боковых направлениях через ткань, с начальным волновым фронтом 42, идущим перед вторым волновым фронтом в зависимости от интервала времени между передачей двух толкающих импульсов и от разности задержки распространения в связи с изменением расстояния распространения до фокуса.
Фиг. 2c иллюстрирует передачу зондом 10 третьего толкающего импульса 60 на большую глубину, что производит исходящее наружу излучение волнового фронта 62 поперечной волны. На Фиг. 2c видно, что составной волновой фронт от трех толкающих импульсов, обозначенный профилем составного волнового фронта 42, 52 и 62, распространяется на заметную глубину в ткань, от малой глубины первого толкающего импульса 40 до самой большой глубины третьего толкающего импульса 60. Это позволяет измерять поперечную волну на значительной глубине ткани. В реализации системы, показанной на Фиг. 1, такая последовательность толкающих импульсов может быть использована для обнаружения распространения поперечной волны на глубину 6 см, что является подходящей глубиной для визуализации и диагностики масс в молочных железах.
Следует иметь в виду, что большее или меньшее количество толкающих импульсов может быть передано вдоль вектора толкающего импульса, в том числе один толкающий импульс. Множественные толкающие импульсы могут передаваться в любом порядке, который собственно и определяет форму и направление составного волнового фронта поперечной волны. Например, если толкающие импульсы, изображенные на Фиг. 2a-2c, были переданы последовательно от самых глубоких (60) к самым мелким (40) с соответствующей задержкой между передачами, составной волновой фронт поперечной волны, изображенный на Фиг. 2c, будет иметь наклон, обратный наклону, показанному на Фиг. 2c. Как правило, каждый толкающий импульс представляет собой длинный импульс продолжительностью от 50 до 200 микросекунд. Типичная длительность составляет, например, 100 микросекунд. Ультразвук, образуемый при импульсе длительностью 100 микросекунд, является импульсами волны сжатия и может иметь частоту 7 или 8 МГц, например. Толкающие импульсы хорошо сфокусированы, предпочтительно с числом f от 1 до 2. В одной типичной реализации толкающий импульс передается каждые 2,5 мс (при условии, что скорость перемещения источника сдвига от (40) к (50) и от (50) к (60) больше, чем скорость распространения поперечной волны), что дает толкающие импульсы с частотой передачи 400 Гц. В другой реализации все три толкающих импульса передаются в одной последовательности, чтобы запустить полный волновой фронт поперечной волны до того, как начнется отслеживание А-линий.
Фиг. 3 является еще одной иллюстрацией использования трех толкающих импульсов для создания составного волнового фронта поперечной волны. Три толкающих импульса передаются вдоль векторов 44, 54 и 64, которые, как это видно, выровнены вдоль одного векторного направления на Фиг. 3. Когда самый глубокий толкающий импульс вектора 64 передается первым, а за ним толкающие импульсы, сфокусированные на последовательно меньших глубинах, волновые фронты поперечных волн соответствующих толкающих импульсов будут распространяться как указано волнами 46, 56 и 66 по времени вскоре после того, как будет передан последний толкающий импульс (вектор 64). Интервалы времени между временами передачи толкающих импульсов определяются сдвиговой и продольной скоростями, потому что время распространения до фокуса должно быть принято во внимание. Так как поперечные волны 46, 56 и 66 движутся наружу от вектора толкающего импульса, они отслеживаются импульсами 80 отслеживания, показанными в пространственной прогрессии вдоль верхней части чертежа. Импульсы отслеживания могут возникать как между, так и после толкающих импульсов. В отличие от изображения Фиг. 2c, иллюстрация поперечных волн 46, 56, и 56 составного волнового фронта на Фиг. 3 показывает, что распространяющиеся поперечные волны существенно совмещены во времени и расстоянии горизонтального распространения. С точки зрения резкого различия в скорости распространения между продольными толкающими импульсами и поперечными волнами в тканях, порядка 100 к 1, типичной картиной является, когда индивидуальные толкающие импульсы передаются в быстрой последовательности. Поскольку единственной функцией толкающих импульсов является приложение силы к ткани и не требуется никакого последующего периода времени для приема отраженного сигнала, как в случае с эхо-импульсной ультразвуковой визуализацией, после каждого импульса, по существу, не требуется никакого времени задержки, и толкающие импульсы могут быть переданы в очень быстрой последовательности. Время прохождения толкающего импульса в ткани составляет порядка 100 микросекунд (ультразвук перемещается в тканях со скоростью около 1560 м/с), в то время как время прохождения поперечной волны в ткани составляет порядка от 2 до 10 миллисекунд (поперечные волны перемещаются в тканях со скоростью около 1-5 м/с в ткани). Таким образом, с точки зрения периодичности и скорости прохождения поперечной волны, быстрая последовательность толкающих импульсов является почти мгновенной, обеспечивая единый волновой фронт.
В обычной визуализации и количественных измерениях с использованием силы акустического излучения толкающий импульс (импульсы) передается по одному направлению вектора. Когда толчок порождается одномерным массивом, т.е. зондом, имеющим одну строку преобразовательных элементов, массив производит пучок, который может легко контролироваться в одной плоскости изображения массива, но ограничивается одним, относительно небольших размеров фокусом в поперечной или продольной плоскости фиксированным фокусом механического объектива зонда. Это приводит к механическому толчку, который создает ответ, излучаемый вбок во всех направлениях, в и наружу из одной плоскости изображения массива. Движение ткани, вызванное энергией этого толчка, распространяется примерно радиально во всех боковых направлениях, как показано круговыми волновыми фронтами 72, окружающими вектор толкающего импульса и направленными наружу стрелками 70 на Фиг. 4, и испытывает затухание энергии с коэффициентом 1/R в радиальных направлениях в дополнение к обычному затуханию в ткани. В случае качественной и количественной визуализации с использованием силы акустического излучения это вредно, потому что внеплоскостные области изменения жесткости будут вносить свой вклад в осевое смещение тканей в плоскости изображения, снижая точность измерения жесткости в плоскости изображения. В случае количественных измерений с использованием силы акустического излучения радиальное распространение удаляет полезную энергию поперечной волны из плоскости изображения, уменьшая амплитуду сигнала, необходимую для оценки свойства.
В соответствии с принципами настоящего изобретения толкающий импульс формируется как двумерная широкая полоса энергии вместо одного одномерного вектора. Такие двумерные широкие толкающие пучки проходят в измерении D глубины, а также в измерении Е по высоте или азимуту, как показано широким толкающим пучком 80 на Фиг. 5. Широкий толкающий пучок 80 приводит к формированию поперечных волн с плоскими фронтами, как показано плоскими волновыми фронтами 90, 92 на Фиг. 5, которые перемещаются в поперечном направлении от силового поля широкого толкающего пучка 80, как показано стрелками 91, 93. Эта возбуждающая поперечная волна является источником плоской волны, а не линейным источником, изображенным на Фиг. 4, устраняя затухание с коэффициентом 1/R в радиальной диссипации энергии. Программируемость и гибкость двумерного массива 12 для формирования пучков в произвольных направлениях и из очевидных центров в различных местах на поверхности массива используются для формирования толкаемых областей ткани общей формы, размера и направления толчка посредством осевого и/или бокового качания фокального пятна, быстрого перепрыгивания фокусного пятна из одного места в другое, или и того, и другого, используя преимущество существенного соотношения между скоростями распространения продольных толкающих волн и поперечных волн в ткани (порядка 100 к 1), чтобы обеспечить формирование эффективного источника поперечных волн, который может иметь достаточно произвольные размер, форму и ориентацию, так что может быть сформирован сфокусированный и управляемый источник двумерного или трехмерного пучка поперечных волн желаемой ориентации, формы и размера.
В простой реализации настоящего изобретения, показанной на Фиг. 5, возбуждается плоская, расширенная полоса толкаемой ткани 80, что формирует поперечные волны в плоской полосе 90, 93, распространяющиеся вбок, а не в радиальном направлении наружу, и затухающие с ростом расстояния, пройденного поперечной волной. Это улучшает расстояние проникновения различных модальностей силы излучения. Этот слой может быть сформирован путем фокусировки глубоко в ткани и начала передачи длинного ультразвукового пакета. В то время как пакет передается, точка фокуса переводится на более мелкую позицию, по направлению к зонду, для формирования линейного источника. Несколько таких линий силового толкающего пучка передаются в плоскости, перпендикулярной к поверхности зонда, как показано на Фиг. 5. В качестве альтернативы, плоскость силового толкающего пучка передается в других плоскостях, не перпендикулярных к поверхности массива и в пределах направленности массива, чтобы создать плоский источник поперечных волн. Такая передача будет эффективно производить единичную толкающую силу в двух измерениях, в течение такого времени, что продолжительность всей возбуждающей последовательности несколько быстрее, чем период получаемых поперечных волн. Поскольку время продольного распространения ультразвука составляет порядка 100 мкс, в то время как нужный период поперечной волны составляет порядка 2 мс, имеется время для многочисленных передач, чтобы создать полосу 90, 92 энергии.
Разновидностью способа передачи, изображенного на Фиг. 5, является передача полосовым пучком, который посредством одновременного возбуждения элементов двумерного массива преобразователей по высоте и азимуту передает полосовой пучок из двумерного массива. Так как профиль задержки двумерного массива является полностью программируемым, передача полосы, сфокусированной глубоко в поле, а затем перемещение точки фокуса ближе со скоростью, сравнимой со скоростью поперечной волны, будет обеспечивать формирование простого плоского источника поперечной волны. Этот плоский источник может быть передан под любым углом поворота, так что поперечные волны могут распространяться в любом боковом направлении. Кроме того, угол наклона плоского источника может изменяться, так что источник поперечной волны может быть направлен в плоскости, не перпендикулярные к массиву.
Третья реализация настоящего изобретения проиллюстрирована на Фиг. 6. В этом варианте осуществления полосовой пучок передается двумерным массивом преобразователей, который является криволинейным в поперечном направлении, либо в пространстве, либо в профиле задержки, либо и в том, и в другом, так что результирующий источник поперечной волны фокусируется в тонкий пучок, что дополнительно увеличивает разрешение и чувствительность способов, используемых для его обнаружения. Возможно даже создать кривизну в осевом направлении, как показано широким толкающим пучком (PBS) на Фиг. 6, создавая двумерную фокусировку поперечных волн. Как показывает этот чертеж, двумерный 12 массив преобразователей формирует криволинейный широкий толкающий пучок PBS. Кривизна PBS заставляет фронт поперечной волны SWF постепенно сходиться по мере его прохождения, как показано постепенным схождением SWF1, SWF2 и SWF3 к закрашенной клеточками плоскости 98. Это схождение показано также профилем 96 криволинейных фронтов поперечной волны. Справа на чертеже изображен фронт поперечной волны SWF2, иллюстрирующий обратную кривизну фронта поперечной волны по мере того, как он проходит за линию максимального схождения SWF3. Этот метод фокусировки поперечных волн является наиболее подходящим для линейного способа измерения, а не для плоскостного способа измерения. Скорость сбора данных резко снижается в обмен на значительное увеличение чувствительности вблизи фокуса поперечной волны в SWF3. Этот способ может также использоваться для фокусировки двумерного криволинейного волнового фронта поперечной волны в ограниченную лишь дифракцией точку фокуса или в область с ограниченной осевой глубиной.
Диагностика жесткости ткани, которая выполняется путем измерения поперечных волн, сильно зависит от точного отслеживания волнового фронта поперечной волны во времени так, чтобы изменения в скорости его распространения по мере прохождения через различные ткани могли быть точно измерены. В системах из уровня техники эти измерения проводились в предположении, что не было относительного движения между ультразвуковым зондом и тканью, так что единственным относительным движением ткани является движение, производимое силой толкающего импульса. Это предположение зачастую неверно, так как относительное движение может также происходить от нетвердого удержания зонда, от движения пациента, или от анатомического движения за счет дыхания и сердцебиения. Смещение, вызываемое силой излучения, очень мало, порядка 10 мкм. Хотя точность ультразвукового RF отслеживания может достигать 1-2 мкм, движение поперечной волны может быть забито гораздо большими движениями пациента, такими как сердечные и дыхательные движения, а также окружающими шумами. Хотя может быть использована фильтрация, чтобы попытаться устранить шум, частота которого находится за пределами диапазона гармонических частот поперечной волны, в соответствии с еще одним аспектом настоящего изобретения предпринят дополнительный шаг для снижения шума. Этот шаг заключается в использовании смещения, оцененного вдали от области возбуждения (например, на глубине, составляющей по меньшей мере половину глубины поля, находящегося вдали от фокуса в направлении глубины) в качестве фонового шума, так как можно допустить, что в этой области не прикладывается никакой существенной силы излучения. Этот «источник» шума в форме оценки смещения вычитается из смещения поперечной волны, оцененного в интересующей области.
Простой пример обнаружения фонового движения показан на Фиг. 7. Одновекторный толкающий пучок, будучи сфокусированным, имеет наиболее существенное влияние вдоль оси пучка вблизи глубины 110 фокуса. Фиг. 7 иллюстрирует профиль 100 векторного толкающего пучка, в котором сила толкающего пучка является сконцентрированной. Некоторые эластографические способы, основанные на силе акустического излучения, включают в себя только отслеживание вдоль той же оси, что и у толкающего пучка, и в этом случае данные от отслеживающих пучков, которые уже используются, могут быть использованы для обнаружения фонового движения, но из диапазонов, которые значительно короче, и значительно больше, чем фокусная длина, то есть за пределами глубины поля сфокусированного толкающего пучка, чтобы сделать оценку осевого движения для вычитания из отсчета измерения. Звездочки 102 и 104 иллюстрируют области фокуса двух фоновых отслеживающих пучков, один из которых расположен выше области фокуса толкающего импульса, а другой расположен ниже области фокуса толкающего импульса. Области фокуса фоновых отслеживающих пучков показаны пунктирными профилями пучка по обе стороны фоновых отслеживающих пучков. Эхо-сигналы от этих мест фонового отслеживания оцифровываются многократно до, во время и/или после передачи толкающего импульса (импульсов). Эти различающиеся по времени эхо-сигналы сравниваются, обычно путем корреляции, и для оценки наличия осевого фонового движения используется сравнение (сравнения). Любое смещение ткани из-за фоновых эффектов вычитается из оценок движения, вызванного поперечной волной, чтобы скорректировать оценку движения поперечной волны на величину фоновых эффектов.
Фиг. 8 иллюстрирует другой пример обнаружения фонового движения. В этом примере дополнительные точки 106, 107, 108 и 116, 117, 118, расположенные сбоку далеко за пределами области 120 отслеживания поперечной волны, представляющей интерес, могут отслеживаться в течение интервала измерения для получения данных, которые позволяют вычислить оценку фонового движения в любой точке внутри или вокруг области, представляющей интерес. Таким образом могут быть обнаружены эффекты движения от наклона или вращения зонда во время интервала измерения. Например, если сравнения изменений в эхо-сигналах в точках 106, 107, 108 с течением времени указывают на движение вверх и влево от интересующей области 120, а разности в точках 116, 117, 118 в то же время указывают на движение вниз и вправо от интересующей области, можно сделать вывод, что существует общее вращательное или наклонное движение зонда по отношению к области, представляющей интерес, для которого должна быть сделана компенсация измерений.
Как показано на Фиг. 9, также возможно, а в некоторых случаях может быть желательно, отслеживать в плоскости двумерного изображения вдоль нескольких линий в интересующей области 120, прилегающей к области 100 толчка, в моменты времени до и после события толчка. В этом примере две линии 126, 127, 128 и 136, 137, 138 отслеживания фонового движения оцифровываются периодически в течение интервала измерения слева от вектора 100 толкающего импульса и две линии 146, 147, 148 и 156, 157, 158 отслеживания фонового движения оцифровываются справа от вектора толкающего импульса. Как правило, необходимы одна выборка значений фонового движения до и несколько выборок значений фонового движения после события толчка, чтобы получить оценку движения из-за события толчка. Тем не менее, если получены два или более ансамбля выборок значений фонового движения перед толчком, оценка фонового движения также может быть получена. Если по меньшей мере один ансамбль эхо-сигналов фонового движения также получен через достаточно длительное время после толчка, дополнительные оценки фонового движения также могут быть получены, так как движение может быть интерполировано, а не экстраполировано, во времени от момента перед толкающим импульсом до момента после толкающего импульса. Этот способ может быть выполнен с множественными боковыми смещениями от оси толкающего пучка. Если фоновое движение не является равномерным в области, представляющей интерес, может быть получена оценка скалярного поля осевой составляющей движения в пределах объема образца.
Следует иметь в виду, что коррекция с учетом фонового движения может быть выполнена для измерений, выполненных в трехмерном пространстве, в дополнение к одной плоскости. Использование двумерного массива преобразователей, как показано на Фиг. 1, позволяет использовать эффективность трехмерной эластографии для получения дополнительной клинической пользы, поскольку внеплоскостные изменения упругих свойств могут отрицательно повлиять на эффективность одноплоскостных эластографических измерений. Дополнительное трехмерное управление геометрией толкающего пучка посредством двумерного массива может улучшить отношение сигнал-шум и дать дополнительную функциональность. В этом случае дополнительные пучки отслеживания фонового движения за пределами области, представляющей интерес, в течение интервала измерения и/или ранние и поздние пучки отслеживания фонового движения могут быть добавлены в трехмерной области, представляющей интерес, как указано выше для двумерного случая, чтобы получить полную трехмерную объемную оценку осевого движения для коррекции измеренного отклика на возбуждение от толкающего пучка. Например, четыре линии отслеживания фонового движения могут передаваться с интервалами в 90° вокруг вектора толкающего импульса. Линии отслеживания фонового движения могут быть переданы спереди и сзади двумерной полосы толкающего импульса, как описано выше, чтобы обнаружить движение ткани в трехмерном пространстве, над которым измеряются поперечные волны.
Группа изобретений относится к медицинской технике, а именно к ультразвуковым диагностическим системам визуализации. Система визуализации для поперечно-волнового анализа содержит ультразвуковой матричный зонд, содержащий двумерный массив преобразовательных элементов, который передает толкающий импульс вдоль заданного вектора для формирования поперечной волны, импульсы отслеживания вдоль линий отслеживания, примыкающих к вектору толкающего импульса, и принимает эхо-сигналы из точек вдоль линий отслеживания, причем сфокусированный толкающий импульс имеет измерение как по высоте, так и по азимуту, память для хранения эхо-данных линии отслеживания, детектор движения, реагирующий на данные линии отслеживания для обнаружения поперечной волны, проходящей через местоположения линий отслеживания, и дисплей для отображения характеристики обнаруженной поперечной волны, причем ультразвуковой матричный зонд дополнительно выполнен с возможностью передачи вдоль одной или более линий отслеживания фонового движения, вдоль которых принимают эхо-сигналы фонового движения, по соседству с вектором толкающего импульса в различные моменты времени, которые сравнивают для обнаружения фонового движения вблизи поперечной волны. Способ коррекции измерения характеристики поперечной волны в области ткани, с учетом эффекта относительного движения между тканью и ультразвуковым зондом, содержит этапы, на которых используют ультразвуковой зонд для передачи сфокусированного толкающего импульса, передают и принимают эхо-сигналы фонового движения вдоль линий отслеживания фонового движения вне глубины фокуса сфокусированного толкающего пучка, сравнивают эхо-сигналы фонового движения, принятые в различные моменты времени, и формируют характеристику поперечной волны, которая скорректирована с учетом относительного движения. Использование изобретений позволяет уменьшить погрешности измерений, связанные с относительным перемещением датчика. 2 н. и 12 з.п. ф-лы, 9 ил.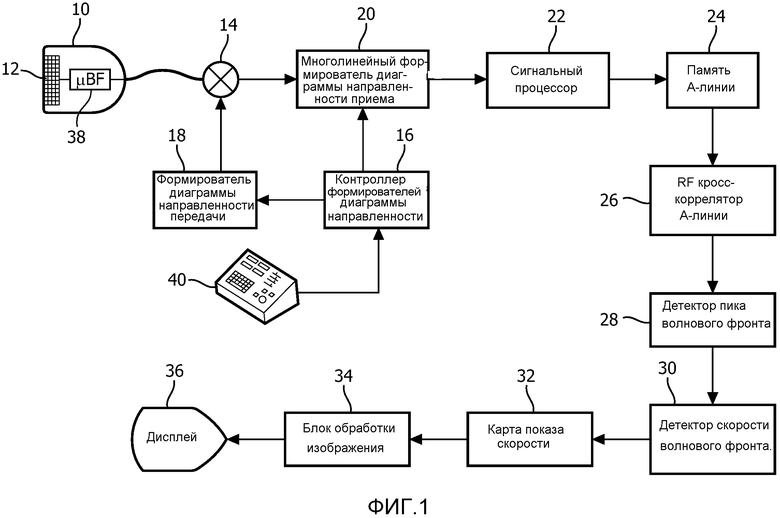
1. Ультразвуковая диагностическая система визуализации для поперечно-волнового анализа, содержащая:
ультразвуковой матричный зонд, содержащий двумерный массив преобразовательных элементов, который передает толкающий импульс вдоль заданного вектора для формирования поперечной волны, передает импульсы отслеживания вдоль линий отслеживания, примыкающих к вектору толкающего импульса, и принимает эхо-сигналы из точек вдоль линий отслеживания, причем сфокусированный толкающий импульс имеет измерение как по высоте, так и по азимуту;
память для хранения эхо-данных линии отслеживания;
детектор движения, реагирующий на данные линии отслеживания для обнаружения поперечной волны, проходящей через местоположения линий отслеживания; и
дисплей для отображения характеристики обнаруженной поперечной волны,
причем ультразвуковой матричный зонд дополнительно выполнен с возможностью передачи вдоль одной или более линий отслеживания фонового движения, вдоль которых принимают эхо-сигналы фонового движения, по соседству с вектором толкающего импульса в различные моменты времени, которые сравнивают для обнаружения фонового движения вблизи поперечной волны.
2. Ультразвуковая диагностическая система визуализации по п. 1, в которой сигналы фонового движения, принимаемые в различные моменты времени, сравнивают посредством корреляционной обработки.
3. Ультразвуковая диагностическая система визуализации по п. 1, в которой линия отслеживания фонового движения расположена вдоль вектора толкающего импульса,
причем фоновое движение обнаруживают в точках, расположенных выше и ниже глубины фокуса толкающего импульса.
4. Ультразвуковая диагностическая система визуализации по п. 1, в которой линия отслеживания фонового движения расположена на любой из боковых сторон вектора толкающего импульса.
5. Ультразвуковая диагностическая система визуализации по п. 1, дополнительно содержащая интересующую область для анализа поперечной волны, расположенную по меньшей мере на одной стороне вектора толкающего импульса,
причем линия отслеживания фонового движения расположена рядом с интересующей областью.
6. Ультразвуковая диагностическая система визуализации по п. 1, дополнительно содержащая интересующую область для анализа поперечной волны, расположенную по меньшей мере на одной стороне вектора толкающего импульса,
причем линия отслеживания фонового движения расположена в интересующей области.
7. Ультразвуковая диагностическая система визуализации по п. 6, в которой вторая линия отслеживания фонового движения расположена в интересующей области, смежной с первой линией отслеживания фонового движения.
8. Ультразвуковая диагностическая система визуализации по п. 1, в которой ультразвуковой матричный зонд дополнительно содержит двумерный массив преобразовательных элементов,
причем сигналы фонового движения расположены в трехмерном пространстве вокруг вектора толкающего импульса.
9. Ультразвуковая диагностическая система визуализации по п. 8, в которой сигналы фонового движения принимают из объемных квадрантов, расположенных вокруг вектора толкающего импульса.
10. Ультразвуковая диагностическая система визуализации по п. 8, в которой двумерный матричный преобразовательный элемент дополнительно выполнен с возможностью производить полосу энергии толкающего импульса для формирования волнового фронта поперечной волны,
причем сигналы фонового движения принимаются от областей спереди и сзади волнового фронта поперечной волны.
11. Ультразвуковая диагностическая система визуализации по п. 1, дополнительно содержащая процессор, реагирующий на измерение поперечной волны и обнаруженное фоновое движение, который выполнен с возможностью коррекции измерения поперечной волны с учетом обнаруженного фонового движения.
12. Способ коррекции измерения характеристики поперечной волны, измеренного в области ткани, с учетом эффекта относительного движения между тканью и ультразвуковым зондом, содержащий этапы, на которых:
используют ультразвуковой зонд для передачи сфокусированного толкающего импульса для формирования поперечной волны в области ткани, причем ультразвуковой зонд содержит двумерный массив преобразовательных элементов;
передают вдоль одной или более линий отслеживания фонового движения и принимают эхо-сигналы фонового движения вдоль линий отслеживания фонового движения вне глубины фокуса сфокусированного толкающего импульса;
сравнивают эхо-сигналы фонового движения, принятые в различные моменты времени, для обнаружения относительного движения между ультразвуковым зондом и областью ткани в течение интервала времени, когда обнаруживается поперечная волна, и
формируют характеристику поперечной волны, которая скорректирована с учетом относительного движения.
13. Способ по п. 12, в котором использование ультразвукового зонда дополнительно содержит этап, на котором передают толкающий импульс посредством ультразвукового зонда для формирования поперечной волны,
причем обнаружение относительного движения дополнительно содержит этапы, на которых:
получают эхо-сигналы фонового движения вблизи толкающего импульса в различные моменты времени и
сравнивают полученные в различные моменты времени эхо-сигналы фонового движения для обнаружения фонового движения.
14. Способ по п. 13, в котором сравнение полученных в различные моменты времени эхо-сигналов фонового движения дополнительно содержит этап, на котором коррелируют эхо-сигналы фонового движения.
| 2010191113 A1, 29.07.2010;US 5810731 A, 22.09.1998;US 2010069751 A1, 18.03.2010;US 2003158483 A1, 21.08.2003;WO 2009140607 A1, 19.11.2009;RU 2005135637 A, 10.06.2006 | |||
| Л.В.ОСИПОВ ";Ультразвуковые диагностические приборы";, глава ";Разнообразный мир ультразвуковых диагностических приборов";, М., ВИДАР, 1999, с.с.27-59. |

