ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к направляемому магнитным резонансом сфокусированному ультразвуку высокой интенсивности, в частности, оно относится к определению смещения ткани посредством сфокусированного ультразвука высокой интенсивности с использованием магнитно-резонансной визуализации.
УРОВЕНЬ ТЕХНИКИ
Для сфокусированного ультразвука высокой интенсивности (HIFU) матрица элементов ультразвуковых преобразователей используется, чтобы сформировать ультразвуковой преобразователь. Подача электропитания переменного тока на элементы преобразователя заставляет их генерировать ультразвуковые волны. Ультразвуковые волны от каждого из элементов преобразователя складываются или вычитаются в различных местах на пути прохождения пучка. Управляя фазой переменного тока электропитания, подаваемого на каждый из элементов преобразователя, можно управлять фокусом или объемом, в котором фокусируется мощность ультразвука.
Терапия опухолей сфокусированным ультразвуком высокой интенсивности (HIFU) требует большой степени пространственной точности, чтобы избежать повреждения здоровой ткани, а также для получения оптимального использования системы. Как показывает существующая практика, хотя избежать повреждения здоровой ткани из-за плохого наведения обычно легко для больших стационарных опухолей, если в качестве текущей практики использовать маломощную тестовую обработку ультразвуком, технические характеристики и/или клинические показатели системы могут пострадать, например, при использовании неправильного знания положения для алгоритма обратной связи. А это переходит в снижение эффективности лечения.
Магнитно-резонансная (MR) визуализация, использующая силу давления акустического излучения, (MR-ARFI) может использоваться для наблюдения силы излучения, с помощью которой на ткань в организме оказывают воздействие волны механического давления. Это, например, содержит оценку силы излучения, создаваемой поглощаемым сфокусированным ультразвуком высокой интенсивности.
Статья "Magnetic resonance acoustic radiation force imaging" авторов McDannold и Maier, опубликованная в журнале Medical Physics, том 35, август 2008, стр. 3748-3758, раскрывает эластографический способ определения смещения, вызываемого сфокусированным ультразвуком, использующий магнитно-резонансную визуализацию.
Патентная заявка США US 2011/0270136 описывает эффективную фокусировку ультразвука, причем фокусировка регулируется, регулируя фазы и амплитуды фазированной матрицы элементов преобразователя. Местоположение и критерий ультразвукового фокуса подтверждаются или визуализируются посредством магнитно-резонансной визуализации с использованием силы акустического излучения (MR-ARFI).
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Изобретение обеспечивает в независимых пунктах формулы изобретения медицинское устройство, компьютерный программный продукт и способ. Варианты осуществления описываются в зависимых пунктах формулы изобретения.
Как должны понимать специалисты в данной области техники, варианты настоящего изобретения могут быть реализованы как устройство, способ или компьютерный программный продукт.
Соответственно, варианты настоящего изобретения могут принимать форму полностью аппаратурного варианта осуществления, полностью программного варианта осуществления (содержащего встроенные программы, резидентное программное обеспечение, микрокод и т. д.) или варианта осуществления, объединяющего программный и аппаратурный варианты, которые все могут обычно здесь упоминаться как "схема", "модуль" или "система". Дополнительно, варианты настоящего изобретения могут принимать форму компьютерного программного продукта, реализуемого на одном или более считываемых компьютером носителях, имеющих содержащийся на них исполняемый компьютером код.
Может использоваться любая комбинация одного или более считываемых компьютером носителей. Считываемый компьютером носитель может быть машиночитаемым носителем сигнала или считываемым компьютером носителем для хранения данных. Термин "машиночитаемый носитель", как он используется здесь, охватывает любой физический носитель для хранения данных, который может хранить команды, исполняемые процессором компьютерного устройства. Машиночитаемый носитель может упоминаться как считываемый компьютером непередаваемый носитель для хранения данных. Машиночитаемый носитель может также упоминаться как физический считываемый компьютером носитель. В некоторых вариантах осуществления машиночитаемый носитель для хранения данных может также быть способен хранить данные, к которым может быть способен получать доступ процессор компьютерного устройства. Примерами машиночитаемых носителей для хранения данных являются, не ограничиваясь только этим: дискета, магнитный жесткий диск, твердотельный жесткий диск, флэш-память, карта флэш-памяти USB, оперативная память (RAM), постоянная память (ROM), оптический диск, магнитооптический диск и файл регистра процессора. Примерами оптических дисков являются компакт-диски (CD) и цифровые универсальные диски (DVD), например CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или диски DVD-R. Термин "машиночитаемый носитель" также относится к различным типам носителей записи, пригодных для получения к ним доступа компьютерным устройством через сеть или линию связи. Например, данные могут быть получены через модем, через Интернет или по локальной сети. Машиноисполняемый код, находящийся на машиночитаемом носителе, может передаваться, используя любую соответствующую среду, включая, в том числе, но не ограничиваясь только этим, беспроводную среду, проводную среду, оптоволоконный кабель, радиочастотную среду и т.д. или любую соответствующую комбинацию вышесказанного.
Машиночитаемый носитель сигнала может содержать распространяющийся сигнал данных с исполняемым компьютером кодом, заключенным в нем, например, в основной полосе или как часть несущей волны. Такой распространяемый сигнал может принимать любую из множества форм, в том числе, в частности, электромагнитную, оптическую или любую соответствующую их комбинацию. Машиночитаемый носитель сигнала может быть любым машиночитаемым носителем, который не является машиночитаемым носителем для хранения данных и который может передавать, распространять или транспортировать программу для использования системой исполнения команд, оборудованием или устройством или в связи с ними.
"Компьютерная память" или "память" является примером машиночитаемого носителя для хранения данных. Компьютерная память является любой памятью, которая напрямую доступна процессору. "Компьютерное запоминающее устройство" или "запоминающее устройство" является дополнительным примером машиночитаемого носителя для записи данных. Компьютерное запоминающее устройство является любым энергонезависимым машиночитаемым носителем для хранения данных. В некоторых вариантах осуществления компьютерное запоминающее устройство может также быть компьютерной памятью или наоборот.
Термин "процессор", как он используется здесь, охватывает электронный компонент, способный исполнять программу или исполняемую машиной команду или исполняемый компьютером код. Ссылки на компьютерное устройство, содержащее "процессор", должны интерпретироваться как возможно содержащие более чем один процессор или процессорное ядро. Процессор может быть, например, многоядерным процессором. Термин "процессор" может также относиться к группе процессоров внутри единой компьютерной системы или системы, распределенной среди множественных компьютерных систем. Термин "компьютерное устройство" также должен интерпретироваться так, чтобы по возможности относиться к группе или сети компьютерных устройств, каждое из которых содержит процессор или процессоры. Исполняемый компьютером код может исполняться многочисленными процессорами, которые могут присутствовать в пределах одного и того же компьютерного устройства или которые могут быть даже распределены среди множества компьютерных устройств.
Исполняемый компьютером код может содержать машиноисполняемые команды или программу, которые побуждают процессор выполнять вариант настоящего изобретения. Исполняемый компьютером код выполнения операций для вариантов настоящего изобретения может быть записан в любой комбинации одного или более языков программирования, в том числе объектно-ориентированных языков программирования, таких как Java, Smalltalk, C++ и т.п., и традиционных языков процедурного программирования, таких как язык программирования "C" или подобные языки программирования, и быть скомпилирован в машиноисполняемые команды. В некоторых случаях исполняемый компьютером код может быть в форме языка высокого уровня или в предварительно скомпилированной форме и использоваться в сочетании с интерпретатором, который на лету формирует машиноисполняемые команды.
Исполняемый компьютером код может исполняться полностью на компьютере пользователя, частично на компьютере пользователя, как автономный пакет программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть соединен с компьютером пользователя через любой тип сети, в том числе, через локальную сеть (LAN) или глобальную сеть (WAN), или соединение может быть сделано с внешним компьютером (например, через Интернет, используя Интернет-провайдера).
Варианты настоящего изобретения описываются со ссылкой на блок-схему и/или блок-схемы последовательности выполнения операций способов, оборудования (систем) и компьютерных программных продуктов в соответствии с вариантами осуществления изобретения. Следует понимать, что каждый блок или часть блоков блок-схемы последовательности выполнения операций, чертежей и/или блок-схем могут реализовываться командами компьютерной программы в форме исполняемого компьютером кода, когда это применимо. Дополнительно, следует понимать, что когда это не является взаимоисключающим, блоки на различных блок-схемах последовательностей выполнения операций, чертежах и/или блок-схемах могут объединяться. Эти команды компьютерной программы могут подаваться на процессор универсального компьютера, специализированного компьютера или другого программируемого устройства обработки данных, образуя такую машину, чтобы, когда команды исполняются процессором компьютера или другого программируемого устройства обработки данных, осуществлять средство для реализации функций/действий, определенное в блок-схеме последовательности выполнения операций и/или блоке или блоках блок-схемы.
Эти команды компьютерной программы могут также храниться на машиночитаемом носителе, который может управлять компьютером, другим программируемым устройством обработки данных или другими устройствами, чтобы функционировать должным образом, так чтобы команды, хранящиеся на машиночитаемом носителе, создавали производственное изделие, содержащее команды, осуществляющие функцию/действие, указанную в блок-схеме последовательности выполнения действий или в блоке или блоках блок-схемы.
Команды компьютерной программы могут также загружаться на компьютер, другое программируемое устройство обработки данных или другие устройства, чтобы заставить выполнять последовательность операционных этапов, которые должны выполняться на компьютере, другом программируемом устройстве или других устройствах, чтобы создать осуществляемый компьютером процесс, так чтобы команды, исполняемые на компьютере или другом программируемом устройстве, обеспечивали процессы реализации функций/действий, определенных в блок-схеме последовательности выполнения операций и/или блоке или блоках блок-схемы.
Термин "интерфейс пользователя", как он используется здесь, является интерфейсом, позволяющим пользователю или оператору взаимодействовать с компьютером или компьютерной системой. "Интерфейс пользователя" может также упоминаться как "человеко-машинный" интерфейс. Интерфейс пользователя может предоставлять информацию или данные оператору и/или получать информацию или данные от оператора. Интерфейс пользователя может позволить выполнять ввод от оператора, который должен приниматься компьютером, и может предоставлять пользователю выход от компьютера. Другими словами, интерфейс пользователя может позволять оператору управлять или манипулировать компьютером и интерфейс может позволять компьютеру показывать эффекты от управления или манипулирования оператора. Отображение данных или информации на устройстве отображения или графическом интерфейсе пользователя является примером предоставления информации оператору. Прием данных через клавиатуру, "мышь", шаровой манипулятор, сенсорную панель, джойстик, графический планшет, ручку управления, игровой планшет, веб-камеру, гарнитуру, рычаги, рулевое колесо, педали, проводящие перчатки, управляющий коврик, дистанционное управление и акселерометр - все это примеры компонент интерфейса пользователя, которые позволяют принимать информацию или данные от оператора.
Термин "аппаратурный интерфейс", как он используется здесь, охватывает интерфейс, позволяющий процессору компьютерной системы взаимодействовать и/или управлять внешним компьютерным устройством и/или оборудованием. Аппаратурный интерфейс может позволить процессору посылать управляющие сигналы или команды на внешнее компьютерное устройство и/или оборудование. Аппаратурный интерфейс может также позволить процессору обмениваться данными с внешним компьютерным устройством и/или оборудованием. Примерами аппаратурного интерфейса являются, в частности: универсальная последовательная шина, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE 488, соединение Bluetooth, соединение беспроводной локальной сети, соединение TCP/IP, соединение Ethernet, интерфейс управляющего напряжения, MIDI-интерфейс, интерфейс аналогового входа и интерфейс цифрового входа.
Термин "устройство отображения", как он используется здесь, охватывает устройство вывода или интерфейс пользователя, выполненный с возможностью отображения изображений или данных. Устройство отображения может выводить визуальные, аудио- и/или тактильные данные. Примерами устройства отображения являются, в частности: компьютерный монитор, телевизионный экран, сенсорный экран, тактильный электронный дисплей, экран Брейля, электронно-лучевая трубка (CRT), запоминающая трубка, бистабильный дисплей, электронная бумага, векторный дисплей, плоский дисплей, вакуумный флюоресцирующий дисплей (VF), светодиодный (LED) дисплей, электролюминесцентный дисплей (ELD), плазменные панели (PDP), жидкокристаллический дисплей (LCD), дисплей на органических светодиодах (OLED), проектор и шлем-дисплей.
Медицинские данные изображения определяются здесь как двумерные или трехмерные данные, полученные, используя сканер для получения медицинских изображений. Сканер для получения медицинских изображений определяется здесь как устройство, выполненное с возможностью получения информации о физическом строении субъекта и создания наборов двумерных или трехмерных медицинских данных изображения. Медицинские данные изображения могут использоваться, чтобы создавать визуализацию, полезную для диагностики врачом. Эта визуализация может быть выполнена, используя компьютер.
Данные магнитного резонанса (MR) определяются здесь как записанные результаты измерений радиочастотных сигналов, излучаемых атомными спинами, антенной магнитно-резонансного устройства во время сканирования магнитно-резонансной визуализации. Данные магнитного резонанса являются примером медицинских данных изображения. Изображение магнитно-резонансной визуализации (MRI) определяется здесь как реконструированная двумерная или трехмерная визуализация анатомических данных, содержащихся в данных магнитно-резонансной визуализации. Эта визуализация может быть выполнена, используя компьютер.
Магнитно-резонансные данные могут содержать результаты измерений радиочастотных сигналов, излучаемых атомными спинами антенной магнитно-резонансного устройства во время сканирования магнитно-резонансной визуализации, которые содержат информацию, пригодную для использования для магнитно-резонансной термометрии. Магнитно-резонансная термометрия действует, измеряя изменения температурно-чувствительных параметров. Примерами параметров, которые могут измеряться во время магнитно-резонансной термометрии, являются: смещение частоты протонного резонанса, коэффициент диффузии или изменения времени релаксации T1 и/или T2, которые могут использоваться для измерения температуры, используя магнитный резонанс. Смещение частоты протонного резонанса является температурно-зависимым, потому что, как показывает опыт, магнитное поле индивидуальных протонов атомов водорода зависит от окружающей молекулярной структуры. Увеличение температуры уменьшает молекулярный скрининг за счет воздействия температуры на водородные связи. Это приводит к температурной зависимости частоты протонного резонанса.
Плотность протонов линейно зависит от равновесного намагничивания. Поэтому изменения температуры можно определить, используя взвешенные изображения плотности протонов.
Времена релаксации T1, T2, и T2 со звездочкой (иногда записываемое как T2*) также являются температурно-зависимыми. Реконструкция взвешенных изображений T1, T2 и T2 со звездочкой может поэтому использоваться для создания тепловых или температурных карт.
Температура также оказывает влияние на броуновское движение молекул в водном растворе. Поэтому для измерения температуры могут использоваться последовательности импульсов, способные измерять коэффициенты диффузии, такие как импульсные эхо-сигналы спинов градиента диффузии.
Одним из самых полезных способов измерения температуры, используя магнитный резонанс, является измерение смещения частоты протонного резонанса (PRF) протонов воды. Резонансная частота протонов является температурно-зависимой. По мере изменения температуры в объемном элементе изменение частоты будет заставлять изменяться измеренную фазу протонов воды. Поэтому может быть определено изменение температуры между двумя фазовыми изображениями. Этот способ определения температуры обладает тем преимуществом, что он является относительно быстрым по сравнению с другими способами. Способ PRF обсуждается здесь более подробно, чем другие способы. Однако, обсуждаемые здесь способы и технологии также применимы к другим системам термометрии с магнитно-резонансной визуализацией.
Спектральные данные магнитного резонанса определяются здесь как зарегистрированные результаты измерений радиочастотных сигналов, излучаемых атомными спинами антенной магнитно-резонансного устройства во время сканирования магнитно-резонансной визуализации, которая содержит информацию, описывающую пики многочисленных резонансов.
Спектральные данные магнитного резонанса могут, например, использоваться для протонного спектрального (PS) получения изображения, основанного на способе температурного картографирования, который может создавать температурные карты по абсолютной шкале. Эта карта температур абсолютной шкалы может поэтому использоваться для выполнения температурной калибровки. Этот способ опирается на физические принципы температурной зависимости смещения протонного резонанса воды как способе, связанном с частотой протонного резонанса, но способ сбора данных является другим: смещение частоты вычисляется из спектра магнитного резонанса. Смещение вычисляется по разности положений пика воды и эталонного протонного пика. В качестве эталона могут использоваться, например, протоны в липидах, поскольку, как известно, их резонансная частота почти независима от температуры, в то время как протонный пик воды имеет линейную зависимость от температуры. Это может быть сделано в объемных элементах, в которых присутствуют оба типа ткани. Если вода и липиды не существуют в одном и том же объемном элементе, можно попытаться использовать в качестве эталона какой-то другой тип ткани, отличный от липидов. Если это не получается, то могут существовать некоторые объемные элементы, для которых эталонные пики и, следовательно, температурные данные недоступны. В таких случаях могут помочь интерполяция и/или температурная фильтрация, поскольку температура тела, как обычно ожидают, пространственно быстро не изменяется и очевидно, что в качестве исключений существуют места с чрезвычайно локализованным повышением температуры, обычно вызываемым тепловой терапией. Использование эталонных пиков делает способ относительно независимым от отклонений в условиях применения или движения между сканированиями. Поскольку при существующих способах сканирование занимает время, по меньшей мере, порядка одной минуты, способ PS чувствителен к движению между сканированиями или изменению температуры во время сканирования. В случае, когда температура постоянна или изменение температуры мало как во времени, так и в пространстве, способ способен создавать полезную информацию. Например, при сфокусированном ультразвуке высокой интенсивности, направляемом магнитным резонансом (MR-HIFU), способ PS может использоваться для обеспечения фактического распределения температуры тела перед началом MR-HIFU или другого температурного лечения, в отличие от использования пространственно однородной начальной температуры запуска, взятой в качестве внутренней температуры тела, измеренной с помощью температурного датчика. Альтернативно, способ PS может использоваться для проверки работоспособности для накопленной температуры между тепловыми процедурами. Этот способ может также использоваться в качестве калибровки в заданные моменты времени во время гипертермии, чтобы уменьшить/удалить фазовые артефакты, например, за счет дрейфа основного поля или движения, которые накапливаются во время PRF-термометрии.
Используемое здесь "ультразвуковое окно" охватывает окно, которое эффективно прозрачно для ультразвуковых волн или энергии. Обычно в качестве ультразвукового окна используется тонкая пленка или мембрана. Ультразвуковое окно может, например, быть выполнено в виде тонкой мембраны из BoPET (двуосно ориентированный терефталат полиэтилена).
В одном из вариантов изобретение обеспечивает медицинское устройство, содержащее систему магнитно-резонансной визуализации. Система магнитно-резонансной визуализации выполнена с возможностью сбора данных магнитного резонанса от субъекта в зоне визуализации. Медицинское устройство дополнительно содержит систему сфокусированного ультразвука высокой интенсивности для направления ультразвука вдоль оси пучка для ультразвуковой обработки целевой зоны отображения. Целевая зона находится внутри зоны визуализации. Медицинское устройство дополнительно содержит процессор для управления медицинским устройством. Медицинское устройство дополнительно содержит память для хранения машиночитаемых команд. Исполнение машиночитаемых команд побуждает процессор управлять системой магнитно-резонансной визуализации, чтобы собирать данные магнитного резонанса, используя импульсную последовательность. Импульсная последовательность, как она используется здесь, является набором команд или управлением, которые последовательно управляют работой системы магнитно-резонансной визуализации для сбора данных магнитного резонанса. Импульсная последовательность содержит импульсную последовательность визуализации с использованием силы акустического излучения. Следует понимать, что импульсная последовательность, как она используется здесь, может также быть комбинацией или чередованием различных импульсных последовательностей. Импульсная последовательность визуализации, используя силу акустического излучения, содержит возбуждающий импульс. Импульсная последовательность визуализации, используя силу акустического излучения, дополнительно содержит многомерный градиентный пульс или волновой сигнал, применяемый во время импульса радиочастотного возбуждения для выборочно возбуждаемой интересующей области.
Многомерный градиентный импульс или волновой сигнал, как он используется здесь, охватывает градиентный импульс или фоновый сигнал, содержащий по меньшей мере две зависящие от времени пространственные составляющие в перпендикулярных направлениях. K-пространство передачи, в результате, пересекается по меньшей мере в двух измерениях при применении радиочастотного возбуждающего импульса в сочетании с многомерной формой градиентного волнового сигнала. Траектория круговой передачи в k-пространстве может достигаться, например, приложением синусоидальных градиентных волновых сигналов в направлениях по осям x и y. Траектория многомерной передачи в k-пространстве заставляет возбужденную интересующую область ограничиваться более чем в одном направлении. Пространственные составляющие многомерного градиента не должны применяться одновременно во времени, хотя они часто применяются или могут применяться последовательно. Радиочастотный возбуждающий импульс может быть импульсной последовательностью, состоящей из нескольких радиочастотных возбуждающих импульсов, немного разделенных во времени с нулевой радиочастотной мощностью в промежутках между ними. Во многих применениях несколько радиочастотных возбуждающих импульсов разделяются во времени на 5 мс или менее.
Интересующая область содержит заданный объем, который охватывает целевую зону и, по меньшей мере, участок оси пучка. Исполнение команд дополнительно побуждает процессор управлять системой сфокусированного ультразвука высокой интенсивности, чтобы обрабатывать ультразвуком целевую зону, используя систему сфокусированного ультразвука высокой интенсивности, так что ультразвуковая обработка целевой зоны происходит во время импульсной последовательности визуализации, используя силу акустического излучения. Исполнение команд дополнительно побуждает процессор реконструировать изображение, полученное с использование силы излучения, используя данные магнитного резонанса. Этот вариант осуществления может быть предпочтительным, потому что многомерный градиентный импульс ограничивает размер интересующей области. Уменьшенный размер интересующей области может значительно сокращать время, необходимое для конструирования изображения, полученного с использованием силы излучения. Это может позволить управление медицинским устройством в реальном времени, используя изображение, полученное с использованием силы давления.
Варианты осуществления изобретения могут ускорять работу MR-ARFI, так что технология может стать полезной для решения многих проблем, которые все, в первую очередь, связаны с прямой оценкой поля давления внутри живого организма. Эта оценка полезна, например, для оптимизации эффективности нагревания и точности, максимизируя выходное давление в желаемом местоположении для любой установленной выходной мощности от преобразователя (изменяя фазы возбуждения элементов преобразователя, а также для проверки правильности положения точки фокуса, причем все это делается, не создавая заметного нагрева или повреждения самой ткани. Кроме того, MR-ARFI может также использоваться для контроля частоты появления кавитации и нелинейностей в зависимости от локального поглощения, а также внезапных изменения, изменяющих, таким образом, локально приложенную силу излучения. Наконец, может также использоваться контроль давления для трансгенеза и доставки лекарственных средств. Эти применения хорошо известны, но оптимизации MR-технологии было уделено мало внимания. Хотя использование MR-ARFI для целей тестовых проверок не критично ко времени, для большинства других намерений использование MR-ARFI критично ко времени. Кроме того, понимание, что обычно существует заинтересованность только в изменениях оценочного давления, когда изменяется какой-то параметр, а не в точных картах смещения высокого разрешения, позволяет среди других способов ускорения сбора данных использовать результаты считываний идентификаторов и получение изображений при уменьшенном поле зрения (FOV).
В некоторых вариантах осуществления заданный объем намного меньше, чем зона визуализации. В некоторых вариантах осуществления заданный объем составляет 1/10 объема зоны визуализации. В других вариантах осуществления заданный объем равен 1/100 объема зоны визуализации.
В некоторых вариантах осуществления пространственное кодирование, выполняемое во время импульсной последовательности визуализации, используя силу акустического давления, осуществляется во время смещения ткани пучком системы сфокусированного ультразвука высокой интенсивности после того, как заканчивается импульс от ультразвуковой системы и ткань затем расслабляется обратно на место, прежде чем будут считаны данные.
Использование многомерного градиентного импульса для выбора трехмерной интересующей области было, например, подробно описано в журнальной статье Schneider et. al. (2012), Inner-volume imaging in vivo using three-dimensional parallel spatially selective excitation. Magn. Reson. Med., doi: 10.1002/mrm.24381. В этой статье пространственно выборочное возбуждение более чем в одном измерении достигается, заканчивая градиентные волновые сигналы в многочисленных пространственных направлениях одновременно с радиочастотным возбуждением. В ней подробно описываются две различные трехмерные траектории передачи в k-пространстве траекторий: одна является массой спиральных траекторий в k-пространстве и другая является концентрической траекторией сферической оболочки в k-пространстве. Масса спиральных траекторий содержит x- и y-градиентные составляющие, которые являются синусоидальными, и результирующие спирали в плоскости xy в k-пространстве разделяются короткими градиентами в направлении оси z. Концентрическая траектория сферической оболочки достигается, кодируя спирали вдоль поверхности сферических оболочек с переменным радиусом. В концентрической траектории оболочки x- и y-градиентные составляющие также являются синусоидальными, хотя и с радиусом, зависящим от z-составляющей. Z-градиент, в свою очередь, имеет постоянную амплитуду во время кодирования каждой оболочки, затем амплитуда меняется для кодирования следующей оболочки. Технологии параллельной передачи использовались в этом исследовании, чтобы субдискретизировать k-пространство передачи, сокращая, таким образом, общую продолжительность возбуждения.
В другом варианте осуществления многомерный градиентный импульс является двумерным градиентным импульсом для возбуждения интересующей области так, что интересующая область имеет двумерное поперечное сечение. Это может, например, быть достигнуто, завершая синусоидальный градиентный волновой сигнал линейным увеличением или уменьшением амплитуды во время возбуждения в двух пространственных направлениях. Результирующая траектория передачи в k-пространстве является тогда двумерной скручивающейся или раскручивающейся спиралью в зависимости от того, уменьшается или увеличивается амплитуда градиента, соответственно. Спиральная траектория передачи в k-пространстве в соединении с радиочастотным импульсом будет приводить в результате к цилиндрическому, так называемому остронаправленному пучку объема возбуждения с круговым поперечным сечением. Завершение различных градиентных волновых сигналов в двух пространственных направлениях будет приводить в результате к различным возбуждениям объема. Двумерное поперечное сечение имеет осевую симметрию относительно оси интересующей области. Ось интересующей области и ось пучка HIFU могут быть коаксиальными. По существу, многомерные градиенты используются, чтобы управлять формой интересующей области. В некоторых вариантах осуществления двумерное поперечное сечение перпендикулярно оси интересующей области. Осевая симметрия может иметь различные формы. В некоторых случаях вращение может быть вращением на конкретный угол, например, если какой-то угол обладает одной и той же симметрией, то поперечное сечение является круговым. Поперечное сечение может также иметь прямоугольную, треугольную, многоугольную или другую форму, которая при вращении на конкретное число градусов является идентичной. Это, конечно, исключает случай, когда двумерное поперечное сечение вращается на 360 градусов.
В другом варианте осуществления двумерный возбужденный объем имеет одно из следующего: круговое поперечное сечение, эллиптическое поперечное сечение, прямоугольное поперечное сечение и многоугольное поперечное сечение.
В другом варианте осуществления импульсная последовательность визуализации дополнительно содержит одномерный градиентный импульс считывания, выровненный с осью пучка. Это особенно предпочтительно при использовании двумерного объема возбуждения, как говорилось выше. В этом случае пространственное направление двумерных градиентов может предпочтительно быть выбранным перпендикулярным к оси пучка HIFU, что приведет к объему возбуждения, который пространственно ограничивается в направлениях, перпендикулярных оси пучка HIFU. Применение одномерного градиента считывания вдоль оси пучка HIFU затем заставит всю возбужденную намагниченность в каждом месте перпендикулярно оси пучка отображаться как спроектированную на ось пучка. Если интересующая область, которая возбуждается многомерным возбуждением, делается достаточно малой вокруг оси пучка, то тогда этот спроецированный одномерный результат считывания может использоваться для получения точного значения смещения ткани, вызванного системой сфокусированного ультразвука высокой интенсивности. Это может иметь преимущество дополнительного ускорения сбора данных.
В другом варианте осуществления система магнитно-резонансной визуализации содержит многоэлементную передающую катушку. Импульсная последовательность выполнена с возможностью заставить систему магнитно-резонансной визуализации сократить продолжительность, требующуюся, чтобы ограничить интересующую область до заданного объема, используя многоэлементную передающую катушку. Этот вариант осуществления может иметь преимущество дополнительного уменьшения времени, необходимого для ограничения размера интересующей области. Точно также, уменьшение времени может обмениваться на улучшенный профиль пространственного возбуждения. Мультипередающая катушка позволяет субдискретизацию k-пространства возбуждения точно таким же образом, как матрица приемных катушек позволяет SENSE или субдискретизацию k-пространства приема, чтобы сократить сбор данных, требуя меньшего объема фазовых кодирований.
В другом варианте импульсная последовательность является импульсной последовательностью SENSE или импульсной последовательностью GRAPPA.
В другом варианте осуществления медицинское устройство использует градиент кодирования движения, который является биполярным градиентным импульсом. В этом варианте осуществления ультразвуковая обработка может выполняться дважды и полярность градиента кодирования движения меняется на обратную. Это подобно технологии, используемой при эхо-планарной визуализации, чтобы уменьшить влияние неоднородностей магнитного поля. Два фазовых изображения могут затем вычитаться, чтобы удалить фоновую фазу, в то же время одновременно получая фазовое изображение со средним значением двух выборок, которое содержит только смещение ARFI. Это предпочтительно по сравнению с подходом получения отдельного ARFI-изображения без HIFU, чтобы удалить фоновую фазу, когда кодированное ARFI-изображение смещения усредняется (N=2) и приводит в результате к получению улучшенного SNR без дополнительного времени сканирования.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор выполнять любое из следующего, используя изображение, полученное с использованием силы излучения: обнаруживать пузырьки, обнаруживать некроз ткани, определять смещение ткани, регулировать положение цели и их комбинации.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор выполнять оптимизацию сигнала запуска для системы сфокусированного ультразвука высокой интенсивности, используя изображение, полученное с использованием силы излучения. Измеряя смещение, вызванное ультразвуковым пучком, уровень ультразвука, формируемого системой сфокусированного ультразвука высокой интенсивности, и система сфокусированного ультразвука могут оптимизироваться или регулироваться.
В другом варианте осуществления возбуждающий импульс является одиночным возбуждающим импульсом. Это дает то, что возбуждение и многомерный градиентный импульс формируются как единая группа действий в конкретном окне времени. В этом состоит отличие от других возбуждающих импульсов, которые делятся на две части, например, когда используются 90-градусный и 180-градусный импульсы.
В другом варианте осуществления импульсная последовательность дополнительно содержит градиентный импульс кодирования смещения.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор управлять системой сфокусированного ультразвука высокой интенсивности, чтобы обрабатывать ультразвуком целевую зону, используя систему сфокусированного ультразвука высокой интенсивности, так чтобы обработка ультразвуком целевой зоны происходила, по меньшей мере, во время участка градиентного импульса кодирования смещения.
В другом варианте осуществления импульсная последовательность дополнительно содержит импульсную последовательность подавления внешнего объема для ослабления сигнала магнитного резонанса за пределами интересующей области. Это может быть достигнуто, применяя радиочастотный импульс во время применения одномерных или двумерных градиентов на этапе подготовки, чтобы отклонить намагничивание в областях, которые должны подавляться. Это затем сопровождается градиентами спойлеров, чтобы расфазировать отклоненную намагниченность. Импульсные последовательности, использующие импульсы отклонения и возвращения, могут использоваться перед градиентами спойлеров, чтобы создать более сложные объемы подавления, такие как цилиндрический объем подавления с неподавленным центром. Применяя затем одномерный импульс возбуждения вдоль оси цилиндра, результатом будет возбужденный интересующий объем, очень похожий на объем многомерного остронаправленного цилиндрического пучка возбуждения, описанного ранее. Этот вариант осуществления может быть предпочтительным, потому что он может дополнительно уменьшать сигнал, поступающий извне интересующей области. Например, может использоваться последовательность подготовки намагничивания, которая ослабляет сигнал за пределами интересующей области. Это может, например, выполняться перед многомерным возбуждающим импульсом. Альтернативно, возможно, что область за пределами интересующей области полностью подавляется, используя импульсную последовательность подавления внешнего объема. Затем одномерное возбуждение может использоваться для возбуждения интересующей области. Этот способ может использоваться для ограничения области, необходимой для взятия выборок, также как это делает многомерное возбуждение. Сбор данных для малых объемов в этом варианте осуществления может выполняться быстрее за счет меньшего объема, необходимого для выборки.
В другом варианте осуществления импульсная последовательность содержит импульсную последовательность тепловой визуализации для сбора тепловых данных магнитного резонанса. Импульсная последовательность тепловой визуализации чередуется с импульсной последовательностью визуализации, используя силу акустического излучения. Исполнение команд дополнительно побуждает процессор управлять системой магнитно-резонансной визуализации, чтобы собирать тепловые данные магнитного резонанса, используя импульсную последовательность тепловой визуализации. Исполнение команд дополнительно побуждает процессор реконструировать тепловую карту, используя тепловые данные магнитного резонанса. Исполнение команд дополнительно побуждает процессор отображать на устройстве отображения тепловую карту и изображение, полученное с использованием силы излучения.
В другом варианте осуществления система сфокусированного ультразвука высокой интенсивности имеет регулируемый фокус для управления местоположением целевой зоны. Исполнение команд дополнительно побуждает процессор принимать план лечения, указывающий местоположение целевой зоны внутри субъекта. Исполнение команд дополнительно побуждает процессор управлять системой сфокусированного ультразвука высокой интенсивности, чтобы неоднократно управлять регулируемым фокусом, по меньшей мере, частично, в соответствии с изображением, полученным с использованием силы излучения и планом лечения в реальном времени. Этот вариант осуществления может обладать тем преимуществом, что изображение, получаемое с использованием силы излучения, создается настолько быстро, что оно может использоваться в реальном времени. Используя это в сочетании с планом лечения, субъект может обрабатываться ультразвуком более эффективно.
В другом варианте осуществления импульсная последовательность содержит импульсную последовательность визуализации, чтобы получить данные магнитного резонанса изображения. Исполнение команд дополнительно побуждает процессор неоднократно собирать данные магнитного резонанса изображения. Исполнение команд дополнительно побуждает процессор неоднократно реконструировать изображение, используя данные магнитного резонанса изображения. Исполнение команд дополнительно побуждает процессор неоднократно определять местоположение, используя изображение. Регулируемый фокус управляется, конечно, по меньшей мере, частично используя определение местоположения.
В другом варианте изобретение обеспечивает компьютерный программный продукт, содержащий машиноисполняемый код для его исполнения процессором, управляющим медицинским устройством. Медицинское устройство содержит систему магнитно-резонансной визуализации для сбора данных магнитного резонанса от субъекта внутри зоны визуализации. Медицинское устройство дополнительно содержит систему сфокусированного ультразвука высокой интенсивности для направления ультразвука вдоль оси пучка для обработки ультразвуком целевой зоны. Целевая зона находится внутри зоны визуализации. Исполнение команд дополнительно побуждает процессор управлять системой магнитно-резонансной визуализации для сбора данных магнитного резонанса, используя импульсную последовательность. Импульсная последовательность содержит импульсную последовательность визуализации, используя силу акустического излучения. Импульсная последовательность визуализации, используя силу акустического излучения, содержит возбуждающий импульс. Импульсная последовательность визуализации, используя силу акустического излучения, содержит многомерный градиентный импульс, подаваемый во время радиочастотного возбуждающего импульса для выборочного возбуждения интересующей области. Интересующая область содержит заданный объем, который охватывает целевую зону и, по меньшей мере, участок оси пучка. Исполнение команд дополнительно побуждает процессор управлять системой сфокусированного ультразвука высокой интенсивности для ультразвуковой обработки целевой зоны, используя систему сфокусированного ультразвука высокой интенсивности, так чтобы ультразвуковая обработка целевой зоны происходила во время импульсной последовательности визуализации, используя силу акустического излучения. Исполнение команд дополнительно побуждает процессор реконструировать изображение, полученное с применением силы излучения, используя данные магнитного резонанса.
В другом варианте изобретение обеспечивает способ функционирования медицинского устройства. Медицинское устройство содержит систему магнитно-резонансной визуализации для сбора данных магнитного резонанса от субъекта в зоне визуализации. Медицинское устройство дополнительно содержит систему сфокусированного ультразвука высокой интенсивности для направления ультразвука вдоль оси пучка для ультразвуковой обработки целевой зоны. Целевая зона находится внутри зоны визуализации. Система содержит этап, на котором управляют системой магнитно-резонансной визуализации, чтобы собирать данные магнитного резонанса, используя импульсную последовательность. Импульсная последовательность является импульсной последовательностью визуализации, используя силу акустического излучения. Импульсная последовательность визуализации, используя силу акустического излучения, содержит возбуждающий импульс. Импульсная последовательность визуализации, используя силу акустического излучения, содержит многомерный градиентный импульс, подаваемый во время радиочастотного возбуждающего импульса для выборочного возбуждения интересующей области. Интересующая область содержит заданный объем, который охватывает целевую зону и, по меньшей мере, участок оси пучка. Способ дополнительно содержит этап управления системой сфокусированного ультразвука высокой интенсивности для ультразвуковой обработки целевой зоны, используя систему сфокусированного ультразвука высокой интенсивности, так чтобы обработка ультразвуком целевой зоны происходила во время импульсной последовательности визуализации, используя силу акустического излучения. Способ дополнительно содержит этап реконструкции изображения, полученного с помощи силы излучения, используя данные магнитного резонанса.
Понятно, что один или более из вышеупомянутых вариантов осуществления изобретения может объединяться, если объединенные варианты осуществления не являются взаимоисключающими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Здесь далее предпочтительные варианты осуществления изобретения будут описаны только для примера и со ссылкой на чертежи, на которых:
Фиг. 1 - способ, соответствующий варианту осуществления изобретения;
Фиг. 2 - медицинское устройство, соответствующее варианту осуществления изобретения;
Фиг. 3 - увеличенный участок фиг. 2;
Фиг. 4 - медицинское устройство, соответствующее дополнительному варианту осуществления изобретения;
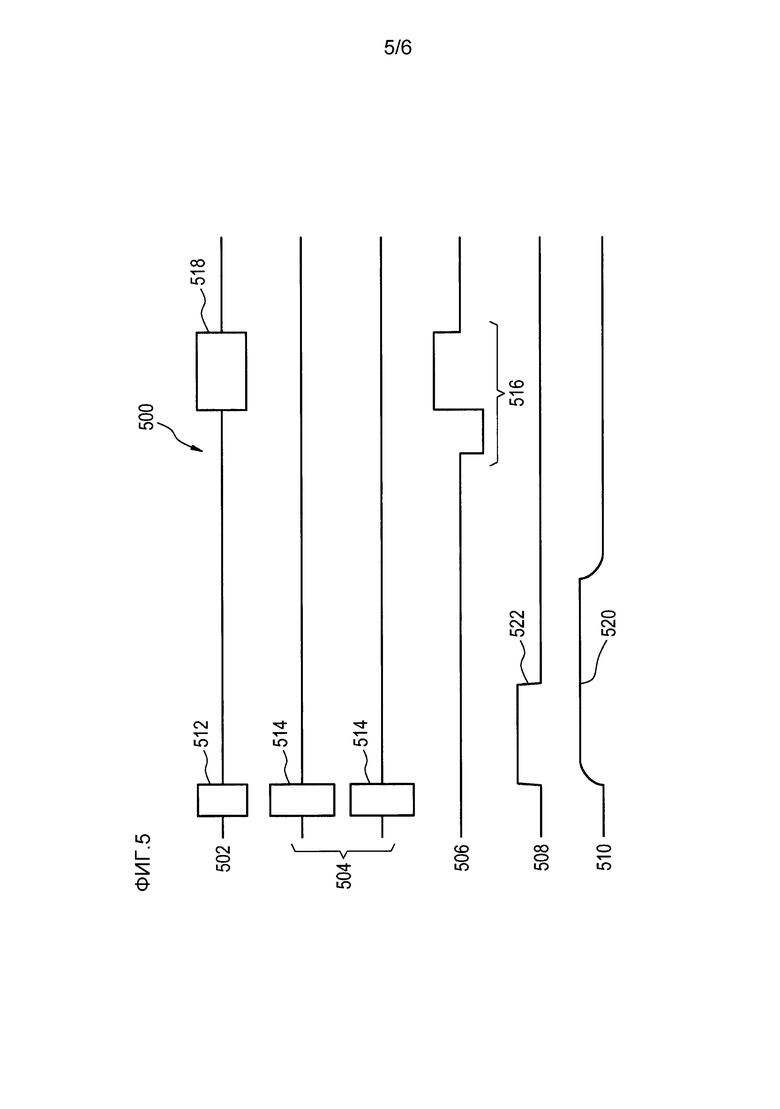
Фиг. 5 - пример импульсной последовательности визуализации, используя силу акустического излучения; и
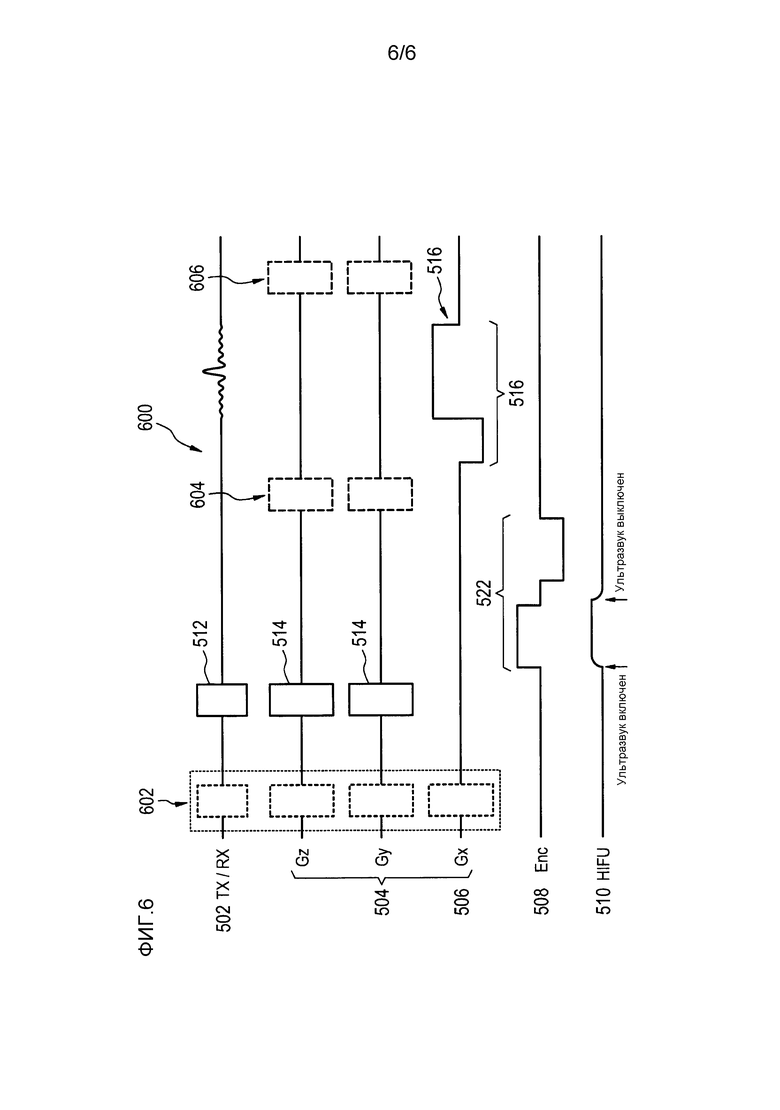
Фиг. 6 - дополнительный пример импульсной последовательности визуализации, используя силу акустического излучения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Схожим образом обозначенные элементы на этих чертежах являются либо эквивалентными элементами, либо выполняют одну и ту же функцию. Элементы, которые были обсуждены ранее, не обязательно будут обсуждаться на последующих чертежах, если функция является эквивалентной.
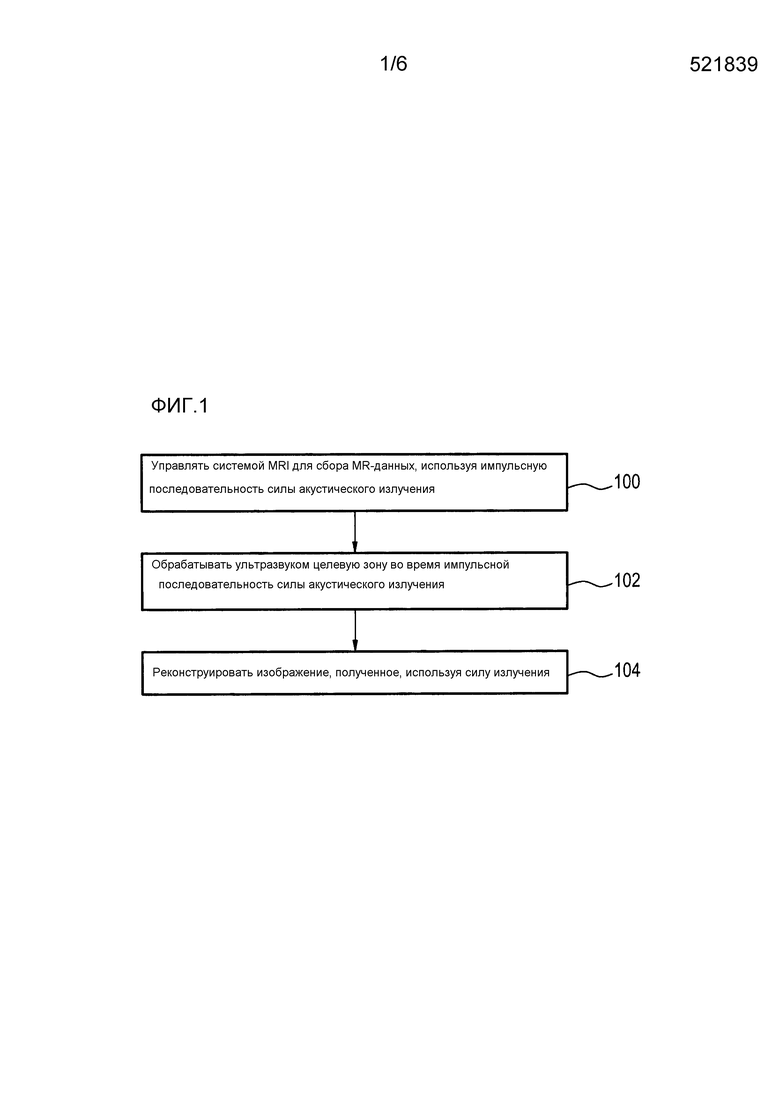
На фиг. 1 показана блок-схема последовательности выполнения операций способа, соответствующего варианту осуществления изобретения. Сначала на этапе 100 системой магнитно-резонансной визуализации управляют, чтобы собрать данные магнитного резонанса, используя импульсную последовательность. Импульсная последовательность содержит импульсную последовательность визуализации, используя силу акустического излучения. Импульсная последовательность визуализации, используя силу акустического излучения, содержит возбуждающий импульс. Импульсная последовательность визуализации, используя силу акустического излучения, содержит многомерный градиентный импульс, подаваемый во время радиочастотного возбуждающего импульса для выборочного возбуждения интересующей области. Интересующая область содержит заданный объем, который охватывает целевую зону и, по меньшей мере, участок оси пучка. Затем на этапе 102 система сфокусированного ультразвука высокой интенсивности управляется для ультразвуковой обработки целевой зоны так, чтобы ультразвуковая обработка целевой зоны происходила во время импульсной последовательности визуализации, используя силу акустического излучения. Наконец, на этапе 104 изображение, полученное, используя излучение, реконструируется, используя данные магнитного резонанса. Изображение, полученное, используя излучение, может содержать одномерные данные, например, в случае использования одномерного градиента считывания.
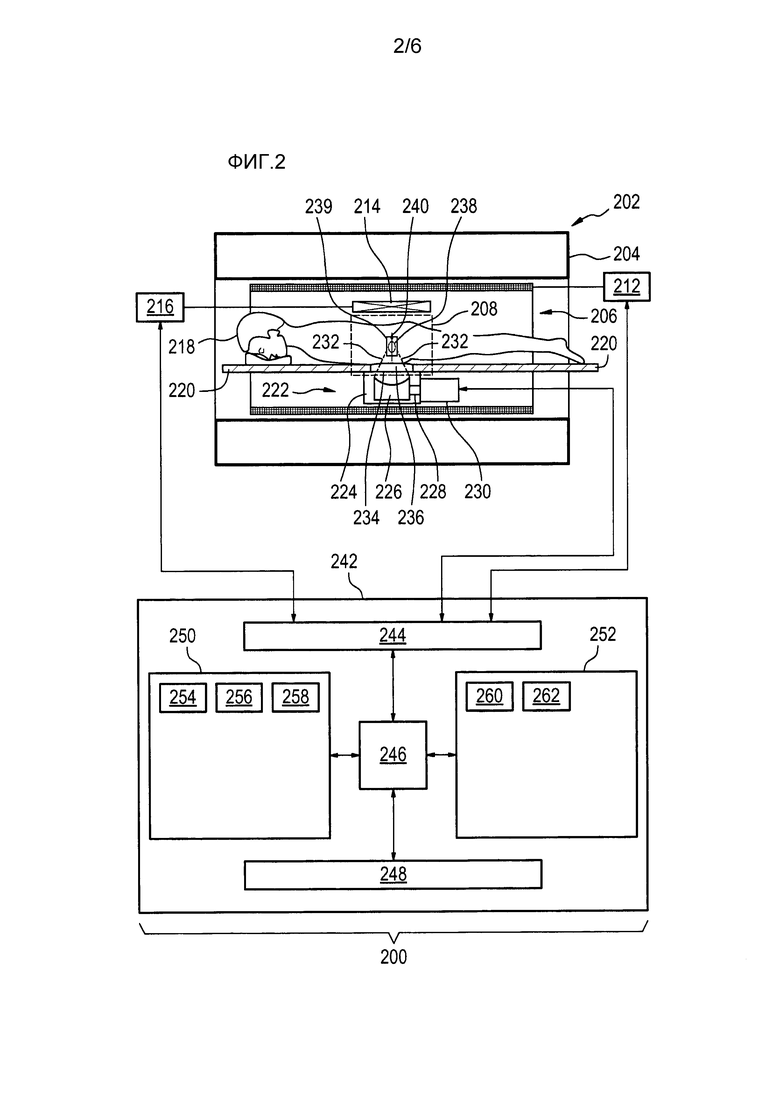
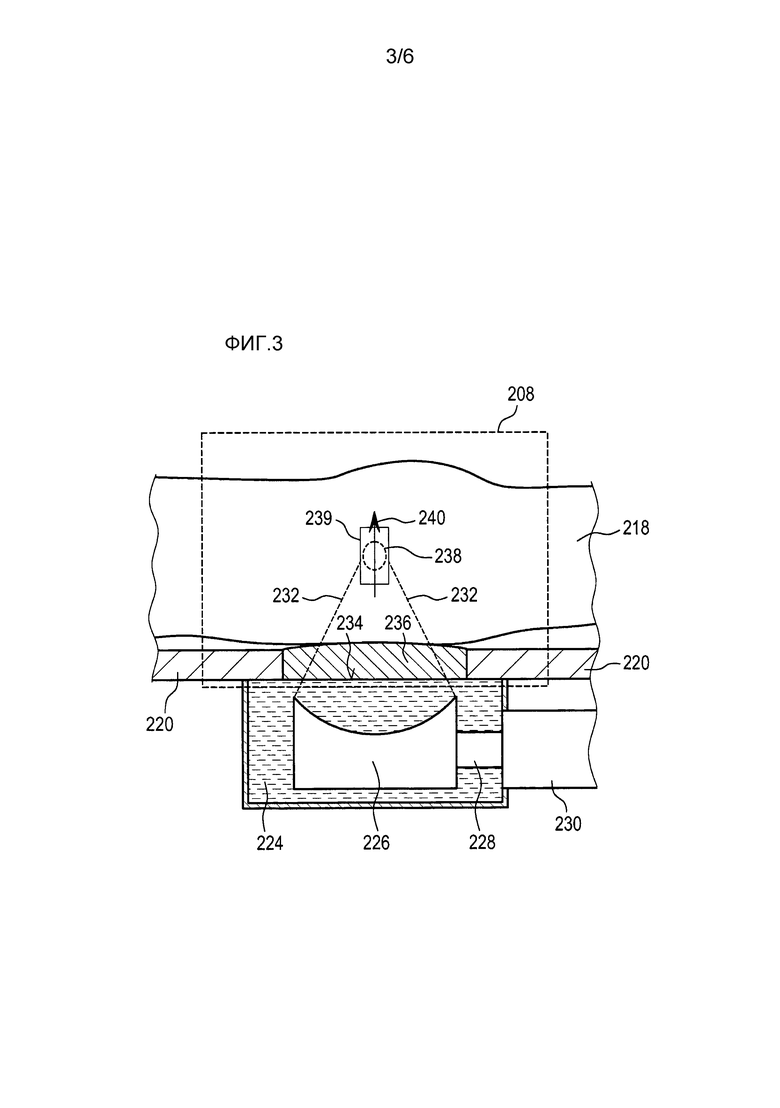
На фиг. 2 и 3 показано медицинское устройство 200, соответствующее варианту осуществления изобретения. На фиг. 3 показан увеличенный участок фиг. 2. Медицинское устройство 200 содержит систему 202 магнитно-резонансной визуализации. Система магнитно-резонансной визуализации содержит магнит 204. Магнит 204 является сверхпроводящим магнитом цилиндрического типа с отверстием 206 в его центре. Магнит имеет охлаждаемый жидким гелием криостат со сверхпроводящими катушками. Также возможно использовать постоянные или резистивные магниты. Использование различных типов магнитов также возможно, например, в случае, когда можно также использовать разрезанный цилиндрический магнит и так называемый открытый магнит. Разрезанный цилиндрический магнит подобен стандартному цилиндрическому магниту, за исключением того, что криостат разделен на две секции, чтобы предоставить доступ к изоплоскости магнита, такие магниты могут, например, использоваться в сочетании с терапией пучком заряженных частиц. Открытый магнит имеет две магнитные секции, одна над другой, с промежутком между ними, который является достаточно большим, чтобы поместить в него субъект: расположение двух областей секций подобно расположению катушки Гельмгольца. Открытые магниты популярны, потому что субъект в них меньше ограничивается. Внутри криостата цилиндрического магнита имеется набор сверхпроводящих катушек. Внутри отверстия 206 цилиндрического магнита имеется зона 308 визуализации, где магнитное поле сильное и достаточно однородное, чтобы выполнить магнитно-резонансную визуализацию.
Внутри отверстия 206 магнита имеется также набор катушек 210 градиентного магнитного поля, которые используются для сбора данных магнитного резонанса, чтобы пространственно кодировать магнитные спины в зоне 208 визуализации магнита 204. Катушки градиентного магнитного поля соединяются с источником 212 электропитания питания катушек градиентного магнитного поля. Катушки 210 градиентного магнитного поля предназначены быть репрезентативными. Обычно катушки градиентного магнитного поля содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Источник 212 электропитания градиентного магнитного поля подает ток в катушки 210 градиентного магнитного поля. Ток, подаваемый в катушки магнитного поля, управляется как функция времени и может линейно изменяющимся или импульсным.
Рядом с зоной 208 визуализации находится радиочастотная катушка 214 для управление ориентацией магнитных спинов в зоне 208 визуализации и для приема радиопередач от спинов также в зоне визуализации. Радиочастотная катушка может содержать многочисленные элементы катушки. Радиочастотная катушка может также упоминаться как канал или антенна. Радиочастотная катушка 214 соединяется с радиочастотным приемопередатчиком 216. Радиочастотная катушка 214 и радиочастотный приемопередатчик 216 могут заменяться отдельными передающей катушкой и приемной катушкой и отдельными передатчиком и приемником. Понято, что радиочастотная катушка 214 и радиочастотный приемопередатчик 216 являются репрезентативными. Радиочастотная катушка 214 предназначена также представлять специализированную передающую антенну и специализированную приемную антенну. Аналогично приемопередатчик 216 может также представлять отдельные передатчик и приемники.
Субъект 218 показан лежащим на подставке 220 для субъекта и частично располагается внутри зоны 208 визуализации. Медицинское устройство 200 также содержит систему сфокусированного ультразвука 222 высокой интенсивности. Система сфокусированного ультразвука высокой интенсивности содержит камеру 224, заполненную текучей средой. Внутри камеры 224, заполненной текучей средой, находится ультразвуковой преобразователь 226. Хотя на этом чертеже не показано, ультразвуковой преобразователь 226 может содержать многочисленные элементы ультразвукового преобразователя, каждый из которых способен генерировать индивидуальный пучок ультразвука. Это может использоваться для электронного управления местоположением точки 238 ультразвуковой обработки, управляя фазой и/или амплитудой переменного электрического тока, подаваемого на каждый из элементов ультразвукового преобразователя. Точка 238 представляет регулируемый фокус медицинского устройства 200.
Ультразвуковой преобразователь 226 соединяется с механизмом 228, позволяющим механически изменять местоположение ультразвукового преобразователя 226. Механизм 228 соединяется с механическим приводом 230, выполненным с возможностью приведения в действие механизма 228. Механический привод 230 также представляет источник питания для подачи электропитания на ультразвуковой преобразователь 226. В некоторых вариантах осуществления источник электропитания может управлять фазой и/или амплитудой электропитания, подаваемого на индивидуальные элементы ультразвукового преобразователя. В некоторых вариантах осуществления механический привод/источник электропитания 230 располагается вне отверстия 206 магнита 204.
Ультразвуковой преобразователь 226 генерирует ультразвук, как проходящий по пути 232. Ультразвук 232 проходит через камеру 228, заполненную текучей средой, и через ультразвуковое окно 234. В этом варианте осуществления ультразвук затем проходит через гелевую прокладку 236. Гелевая прокладка 236 не обязательно присутствует во всех вариантах осуществления, но в этом варианте осуществления в подставке 220 для субъекта имеется углубление установки в него гелевой прокладки 236. Гелевая прокладка 236 помогает передавать ультразвуковую мощность между преобразователем 226 и субъектом 218. После прохождения через гелевую прокладку 236, ультразвук 232 проходит через субъекта 218 и фокусируется на точке 238 ультразвуковой обработки или целевой зоне. Стрелка 240 указывает ось пучка. Когда ультразвук подается на целевую зону, субъект будет испытывать воздействие силы в направлении стрелки 240. Интересующая область 239 указывается прямоугольником 239. Она показана как охватывающая целевую зону 238 и участок оси 240 пучка.
Точка 238 ультразвуковой обработки может перемещаться посредством комбинации механического смещения ультразвукового преобразователя 226 и электронного смещения положения точки 238 ультразвуковой обработки, чтобы обрабатывать весь целевой объем 240.
Источник 212 электропитания катушки градиентного магнитного поля, приемопередатчик 216 и механический привод/источник электропитания 230 системы 222 сфокусированного ультразвука высокой интенсивности показаны как присоединяемые к аппаратурному интерфейсу 244 компьютера 242. Компьютер 242 дополнительно содержит процессор 246, интерфейс 248 пользователя, компьютерное запоминающее устройство 250 и компьютерную память 2. Аппаратурный интерфейс 244 позволяет процессору 246 посылать и принимать команды и данные, чтобы управлять функционированием медицинского устройства 200. Процессор 246 дополнительно соединяется с интерфейсом 248 пользователя, компьютерным запоминающим устройством 250 и компьютерной памятью 252.
Компьютерное запоминающее устройство 250 показано как содержащее импульсную последовательность 254. Импульсная последовательность 254 содержит импульсную последовательность визуализации, используя силу акустического излучения. Импульсная последовательность может также содержать другие типы импульсных последовательностей, такие как нормальная импульсная последовательность визуализации или импульсная последовательность тепловой визуализации. Компьютерное запоминающее устройство 250 показано как дополнительно содержащее данные 256 магнитного резонанса, которые были собраны системой магнитно-резонансной визуализации 202, используя импульсную последовательность 254. Компьютерное запоминающее устройство 250 дополнительно показано как содержащее изображение 258, полученное с использованием силы излучения, которое было реконструировано из данных 256 магнитного резонанса.
Компьютерная память 252 показано как содержащая модуль 260 управления. Модуль 260 управления содержит исполняемый компьютером код, позволяющий процессору 246 управлять действиями и функцией системы 202 магнитно-резонансной визуализации. Например, модуль 260 управления может использовать импульсную последовательность 254, чтобы управлять системой 202 магнитно-резонансной визуализации для сбора данных 256 магнитного резонанса. Компьютерная память 252 показана как дополнительно содержащая модуль 262 реконструкции изображения, полученного с использованием силы излучения. Модуль 262 реконструкции изображения, полученного с использованием силы излучения, содержит исполняемый компьютером код, позволяющий процессору 246 реконструировать изображение 258, полученное с применением силы излучения, используя данные 256 магнитного резонанса. Модуль 262 реконструкции изображения, полученного с применением силы излучения, может также использовать данные в отношении действия и синхронизации системы 222 сфокусированного ультразвука высокой интенсивности для реконструкции изображения 228, полученного с использованием силы излучения. Так как обработка ультразвуком целевой зоны 238 синхронизируется со сбором данных 256 магнитного резонанса, возможно, что в некоторых вариантах осуществления система 222 сфокусированного ультразвука высокой интенсивности будет стробироваться, используя импульсную последовательность 254.
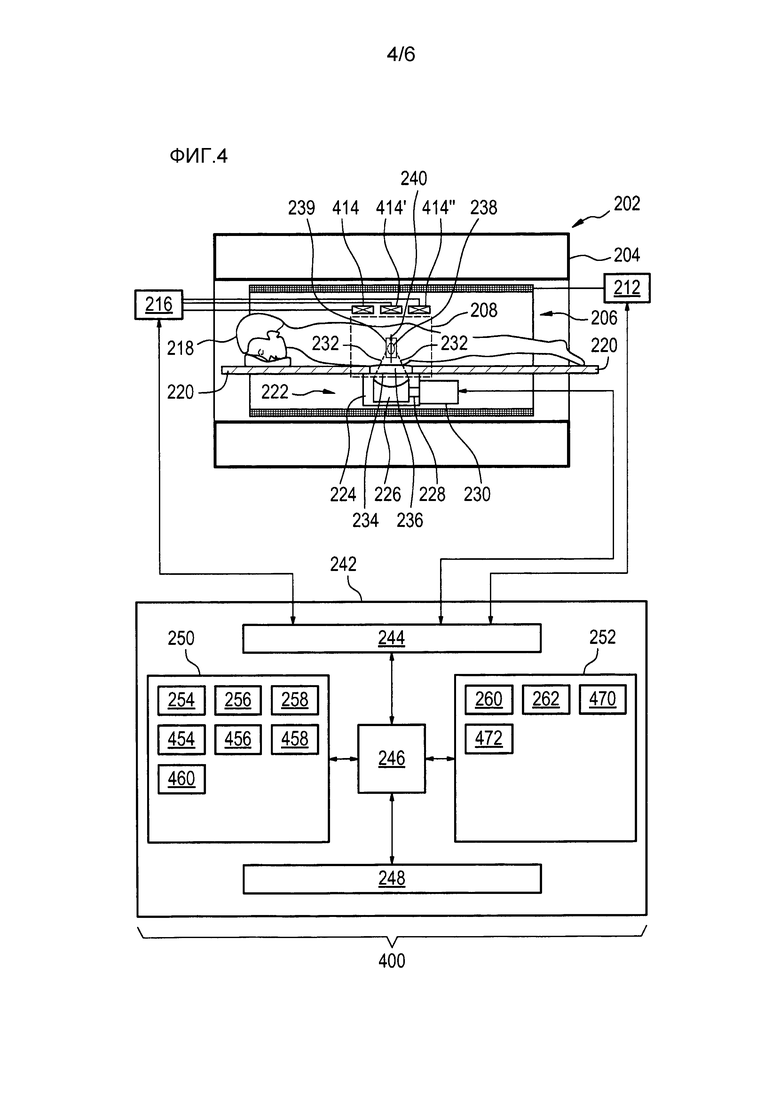
На фиг. 4 показано медицинское устройство 400, схожее с медицинским устройством, показанным на фиг. 2 и 3. В этом случае есть четыре радиочастотные катушки 414, 414', 414''. Они показаны как соединенные с приемопередатчиком 216. Объединение приемопередатчика 216 с радиочастотными катушками 414, 414', 414'' представляет радиочастотную систему, соединенную с многоэлементной передающей катушкой. Это может использоваться для уменьшения длительности возбуждающего импульса или улучшения профиля пространственного возбуждения интересующей области.
Компьютерное запоминающее устройство 250 показано как содержащее импульсную последовательность 454 тепловой визуализации. Импульсная последовательность 454 тепловой визуализации может чередоваться с импульсной последовательностью 254. Компьютерное запоминающее устройство 250 дополнительно показано как содержащее тепловые данные 456 магнитного резонанса, которые были собраны, используя импульсную последовательность 454 тепловой визуализации. Компьютерное запоминающее устройство 250 дополнительно показано как содержащее тепловую карту 258, которая была реконструирована из тепловых данных 456 магнитного резонанса 456. Компьютерное запоминающее устройство дополнительно показано как содержащее план 460 лечения, определяющий местоположение целевой зоны 238. Модуль 260 управления может позволить процессору 246 управлять действием и функцией медицинского устройства 400, используя план 460 лечения.
Компьютерное запоминающее устройство 252 показано как содержащее модуль 470 реконструкции тепловой карты. Модуль 470 реконструкции тепловой карты позволяет процессору 246 реконструировать тепловую карту 458 из тепловых данных 456 магнитного резонанса. Компьютерное запоминающее устройство 252 дополнительно показано как содержащее модуль 472 изменения плана лечения. Модуль 472 изменения плана лечения позволяет процессору 246 изменять план 460 лечения, используя, по меньшей мере, изображение 258, полученное с использованием силы излучения.
На фиг. 5 показана импульсная последовательность 500 визуализации, используя силу акустического излучения, соответствующая варианту осуществления изобретения. На фиг. 5 показаны несколько линий синхронизации. Первая линия синхронизации является линией 502, которая показывает радиочастотную линию синхронизации. Две линии, обозначенные как 504, являются линиями синхронизации градиента выбора линии. Линия 506 является линией синхронизации для градиентов считывания. Линия 508 показывает линию синхронизации градиента кодирования. Линия 510 показывает линию синхронизации для переключения системы сфокусированного ультразвука высокой интенсивности. Во многих случаях различные действия, выполняемые на линиях, обозначенных 504, 506 и 508, должны фактически выполняться одними и теми же градиентными катушками в различные периоды времени. Это можно видеть на диаграмме синхронизации, где сначала присутствует радиочастотный возбуждающий импульс 512, который указывается на линии 502. Форма прямоугольника указывает неопределенную форму для радиочастотного импульса. Одновременно на линиях, обозначенных 504, выполняется многомерный градиент 514. Формы градиентов также представляются как неопределенные формами прямоугольников. После того, как радиочастотное возбуждение 512 закончено, система сфокусированного ультразвука высокой интенсивности включается. Это указывается ультразвуком на импульсе 520 на линии 510. Во время, по меньшей мере, участка, на котором ультразвук находится на импульсе 520, выполняется градиентный импульс 522 пространственного кодирования. Это указывается на линии 508. После сфокусированного ультразвука высокой интенсивности выключается градиентный импульс 516 считывания
На фиг. 6 показана альтернативная импульсная последовательность 600 визуализации с использованием силы акустического излучения. Импульсная последовательность 600 подобна импульсной последовательности 500, показанной на фиг. 5. Кроме того, был добавлен дополнительный набор из радиочастотного импульса и градиентных импульсов 602, чтобы выполнить дополнительное объемное подавление, используя технологию внешнего объемного подавления, как она изложена в работе Wilm et. al. Magnetic resonance in Medicine 57: 625-630 (2007). Также показаны дополнительные градиентные импульсы 604 и 606. Градиентный импульс 604 является дополнительным градиентом фазового кодирования, который может быть необходим, если формируются двумерные или трехмерные изображения по технологии MR-ARFI. Важно иметь в виду, что MR-AFRI-изображения могут быть одномерными данными и в этом случае градиентный импульс 604 не требуется. Градиентный импульс 606 является дополнительным перефокусирующим градиентным импульсом, необходимым, если считываются более одного эхо-сигнала для каждого возбуждения, как это делается при считываниях типа EPI и TSE. Градиентный импульс 606 может также использоваться в качестве расфазирующего спойлерного градиента для уменьшения риска возникновении побочных эхо-сигналов.
MR-ARFI является объединением сбора MR-данных с полем механического давления для измерения смещения в живой ткани за счет силы, прикладываемой полем механического давления. В контексте этого ID, основное внимание будет уделяться MR-ARFI для оценки различных признаков, связанных со сфокусированным ультразвуком высокой интенсивности.
Переключая сбор MR-данных, чтобы запустить импульс HIFU (с непрерывной длительностью несколько миллисекунд) и кодировать смещение, например, посредством биполярных градиентов, возможно затем получить карту смещений, которая дает критерий силы акустического излучения, которая, в свою очередь, коррелируется с приложенным полем локального давления.
Однако, так как HIFU, требуемый для ARFI, прикладывается только кратковременными пакетами длительностью десятки миллисекунд с рабочим циклом менее 30 % вместо непрерывной работы в течение более десятков секунд, не происходит нагревание. Кроме того, требующиеся акустические мощности при ARFI довольно низкие, но это оказывает влияние на SNR карт смещения, давая оценки шумового смещения, если мощность слишком низка.
Применение технологии MR-ARFI может, например, использоваться для получения оценки местоположения фокусной точки, не вызывая нагревания или повреждения ткани. Это само по себе может быть полезно в акустически разнородных тканях или при малых структурах, где точность определения места нагревания является главной.
Другим применением, которое может также быть особенно полезным в акустически сложных средах, таким как ультразвуковая обработка между ребрами, и в направлении к печени, должна быть максимизация смещения в фокусе, максимизируя, таким образом, поле давления для заданной прилагаемой мощности. Это может делаться, поочередно изменяя фазу индивидуальных элементов или групп элементов, пока фазовый резонанс в фокусной точке не максимизируется. Кроме того, может вводиться отключение элементов, которые вообще не вносят свой вклад в давление в фокусной точке, при допущении, что их мощность тогда поглощается только ребрами и во время абляции они будут способствовать нагреванию одних только ребер. Если нагревание ребер является чрезмерным, то результатом может быть повреждение нервов и кожи.
Еще одним возможным применением является контроль изменений структуры ткани во время ультразвуковой обработки. Это может, например, использоваться, чтобы контролировать возникновение кавитации, которая способна привести к увеличению локального отражения/поглощения. Кроме того, для более высоких акустических интенсивностей энергия передается высшим гармоникам, что, в свою очередь, вызывает более эффективное поглощение вблизи фокуса. Это может быть очень желательно и ARFI может потенциально использоваться для контроля начала и степень этих нелинейностей за счет повышенного поглощения и силы давления, которую они создают. Это, в свою очередь, может увеличивать силу излучения, которая может легко контролироваться посредством MR-ARFI. Этот ARFI-контроль должен делаться периодически, чередуясь с термометрией, когда она используется для контроля кавитации во время абляции с использованием HIFU.
Еще одним установленным применением является контроль давления, вызывающего доставку лекарственных средств или экспрессию генов.
Однако все эти применения могут извлекать значительную выгоду из быстрой технологии MR-ARFI, особенно при тех применениях, когда ARFI должна делаться чередуясь с термометрией или другим контролем или когда количество повторений, необходимых для ARFI, является большим, как это имеет место в случае оптимизации сигнала запуска. Настоящее изобретение обсуждает способы, с помощью которых MR-ARFI может ускоряться до клинически приемлемых продолжительностей визуализации.
Традиционно MR-ARFI использует получение двумерных изображений или в некоторых случаях также сообщалось об использовании сгруппированных ID-профилей, объединенных с двумерным изображением. По существу, создаются двумерные изображения.
Для некоторых наиболее интересных применений MR-ARFI, таких как адаптивная перефокусировка, контроль поля давления, контроль кавитации/нелинейности, MR-ARFI предпочтительно должна быть очень быстрой. Это не относится к пробным испытаниям, где эта технология вполне приемлема для визуализации, когда речь идет о нескольких секундах.
Однако для адаптивной перефокусировки это сканирование должен повторяться по меньшей мере 3 раза для количества элементов в преобразователе, у которых должен быть изменен их сигнал управления. 3 повторения необходимы при различных фазах запуска для каждого элемента, чтобы получить соответствующее понимание поведения силы излучения в зависимости от фазового поведения этого канала. Предпочтительно, для каждой фазы запуска должны быть получены два изображения для каждого канала, чтобы удалить фоновый фазовый MR-шум. Если изображение с использованием силы давления получено за 2 с, что может быть приемлемо для испытательных целей, повторения, необходимые для быстрой адаптивной перефокусировки заставляет иметь время сканирования порядка часа. Это, конечно, слишком долго, чтобы быть клинически полезным.
Однако, поскольку мы заинтересованы в максимизации силы излучения, нам нет необходимости получать двумерное изображение поля смещения после определения правильного местоположения фокуса в одном изображении.
В одном из вариантов осуществления двумерный цилиндрический возбуждающий импульс сопровождается импульсом считывания ID-градиента. Направление возбуждения цилиндрического остронаправленного луча должно быть таким же, как импульса ID-считывания и должно совпадать с осью пучка поля HIFU. Сигнал MR-фазы в каждом объемном элементе этого ID-профиля должен тогда представлять среднюю силу излучения, перпендикулярную оси пучка, которая находилась внутри объема, возбужденного двумерным радиочастотным импульсом. Чтобы для усреднения не выравнивать сигнал слишком сильно, диаметр остронаправленного пучка должен поддерживаться как можно меньшим и совпадать с осью пучка HIFU. Такое возбуждение с разумным диаметром (~5 мм) плюс считывание могут быть получены за 30 мс. Это должно позволить адаптивную перефокусировку преобразователя с 256 элементами, которая должна быть сделана менее чем за минуту (3*2*256*30 мс = 46 с). Однако усреднение может быть необходимо, чтобы получить достаточно надежные оценки силы излучения. Хотя это может, по меньшей мере, удваивать время на получение изображения, время сканирования, там не менее, остается пригодным.
В другом варианте осуществления может быть использована технология мультипередачи, чтобы сократить время, необходимое для многомерного кодирования k-пространства возбуждения, позволяя субдискретизацию или обмен этого на улучшенный охват k-пространства возбуждения способом, очень близким к традиционному приему кодирования SENSitivity Encoding (SENSE).
В другом варианте осуществления ограниченная интересующая область, которая возбуждается посредством многомерного возбуждения, реконструируется как двумерное изображение. Ограниченное возбужденное поле зрения позволяет затем меньшие дискреты фазового кодирования, которые должны требоваться, чтобы таким образом уменьшить длительность сканирования любого обычного способа получения двумерного изображения для ARFI. Это может объединяться с технологиями ускорения считывания, такими как SENSE или Generalized Autocalibrating Partially Parallel Acquisition (GRAPPA) (частично параллельный сбор данных с обобщенной автокалибровкой), чтобы дополнительно уменьшить необходимое количество этапов фазового кодирования. Используя быстрые полевые эхо-сигналы последовательности визуализации в сочетании, например, с сегментированным считыванием Echo Planar Imaging (EPI) затем позволяет быстрый сбор данных со скоростью 100-200 мс на изображение. Технологии реконструкции, основанные на наследовании данных или редкой выборке, могут дополнительно объединяться с традиционными сканированиями для получения изображения, поскольку существует очень небольшое изменение от одного изображения к следующему, и большая часть данных может наследоваться.
Если назвать некоторые из технологий, которые могут использоваться, то такими являются реконструкция с ограниченным размером изображения и k-t GRAPPA.
Эти технологии, также как описанная, могут применяться для контроля кавитации и нелинейности и также для контроля поля давления, а не только для фазовой калибровки запуска.
Во многих применениях изобретения абсолютное значение смещения не важно, но вместо этого важно, было ли какое-либо изменение смещения, например, в результате кавитации или изменение в фазе запуска.
Следовательно, возбуждения остронаправленным пучком могут использоваться, чтобы уменьшать поле зрения (Field of View, FOV)) и получать очень быстрое представление в отношении оценки смещения в пределах остронаправленного пучка.
Сравнение между последовательными профилями может позволить определение зависимости между сигналом запуска элемента преобразователя и силой излучения, позволяя, таким образом, адаптивную перефокусировку. Альтернативно, это сравнение может давать в результате информацию об изменениях в поле локального давления и поведении ткани вблизи фокуса, которые возникают в результате увеличения уровня мощности (кавитации/нелинейностей).
Немного другим способом технологии мультипередачи и/или традиционного ускорения приема могут использоваться для субдискретизации k-пространства, соответственно. Субдискретизация может использоваться, чтобы уменьшить покрытия k-пространства, необходимого, таким образом, для укорачивания длительности возбуждающего импульса для возбуждения k-пространства и уменьшения объема фазовых кодирований, необходимых в k-пространстве приема, не вызывая помехи дискретизации. Кроме того, субдискретизация при приеме может объединяться с технологиями реконструкции, которые используют наследование данных, такими как k-t GRAPPA, сжатое считывание и реконструкция с ограничением размеров изображения.
Технологии визуализации, описанные выше, могут объединяться с импульсами градиентов считывания движения в направлении пучка. Это затем объединяется с изображениями, полученными с активным ультразвуком, и затем повторяется с градиентами противоположной полярности. Результирующие данные затем позволять реконструкцию карты смещений с удаленной фоновой MR-фазой.
Хотя изобретение было показано и подробно описано на чертежах и в предшествующем описании, такие чертежи и описание следует считать иллюстративными или примерными и не создающими ограничений; изобретение не ограничивается раскрытыми вариантами осуществления.
Другие изменения в раскрытых вариантах осуществления могут стать поняты и реализованы специалистами в данной области техники при практическом осуществлении заявленного изобретения, исходя из изучения чертежей, раскрытия и приложенной формулы изобретения. В формуле изобретения слово "содержащее" не исключает других элементов или этапов и единственное число не исключает множественное число. Один процессор или другой блок могут выполнять функции нескольких позиций, перечисленных в формуле изобретения. Простой факт, что некоторые критерии повторяются во взаимно различных зависимых пунктах формулы изобретения, не указывает, что объединение этих критериев не может использоваться для достижения преимущества. Компьютерная программа может храниться/распространяться на соответствующем носителе, таком как оптический носитель или твердотельный носитель, поставляемые вместе с другим аппаратурным обеспечением или как его часть, но может также распространяться в других формах, таких как через Интернет или другие проводные или беспроводные системы связи. Любая ссылочные символы в формуле изобретения не должны истолковываться как ограничивающие ее объем.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
200 Медицинское устройство
202 Система магнитно-резонансной визуализации
204 Магнит
206 Отверстие магнита
208 Зона визуализации
210 Градиентные катушки магнитного поля
212 Источник электропитания градиентных катушек магнитного поля
214 Радиочастотная катушка
216 Приемопередатчик
218 Субъект
220 Подставка для субъекта
222 Система сфокусированного ультразвука высокой интенсивности
224 Камера, заполненная текучей средой
226 Ультразвуковой преобразователь
228 Механизм
230 Механический привод/источник электропитания
232 Путь прохождения ультразвука
234 Ультразвуковое окно
236 Гелевая прокладка
238 Точка ультразвуковой обработки или целевая зона
239 Интересующая область
240 Ось пучка
242 Компьютерная система
244 Аппаратурный интерфейс
246 Процессор
248 Интерфейс пользователя
250 Компьютерное запоминающее устройство
252 Компьютерная память
254 Импульсная последовательность
256 Данные магнитного резонанса
258 Изображение, полученное с использованием силы излучения
260 Модуль управления
262Модуль реконструкции изображения, полученного с использованием силы излучения
414 Радиочастотная катушка
414' Радиочастотная катушка
414'' Радиочастотная катушка
454 Импульсная последовательность тепловой визуализации
456 Тепловые данные магнитного резонанса
458 Тепловая карта
460 План лечения
470 Модуль реконструкции тепловой карты
472 Модуль изменения плана лечения
500 Импульсная последовательность визуализации с использованием акустического излучения
502 Линия радиочастотной синхронизации
504 Линия синхронизации градиентов выбора линии
506 Линия синхронизации градиентов считывания
508 Линия синхронизации градиента кодирования
510 Линия синхронизации сфокусированного ультразвука высокой интенсивности
512 Возбуждающий импульс
514 Многомерный градиент
516 Градиент считывания
518 Принятый радиочастотный сигнал
520 Ультразвук включен
522 Пространственное кодирование
Группа изобретений относится к медицинской технике, а именно к диагностическим магнитно-резонансным устройствам визуализации. Устройство содержит систему магнитно-резонансной визуализации для сбора данных магнитного резонанса от субъекта в зоне визуализации, систему сфокусированного ультразвука высокой интенсивности, процессор, причем исполнение команд побуждает процессор управлять системой магнитно-резонансной визуализации, чтобы собирать данные магнитного резонанса, используя импульсную последовательность, при этом импульсная последовательность содержит импульсную последовательность визуализации, используя силу акустического излучения, которая содержит возбуждающий импульс, многомерный градиентный импульс, подаваемый во время импульса радиочастотного возбуждения для выборочного возбуждения интересующей области, который является двумерным, так что интересующая область имеет двумерное поперечное сечение, причем двумерное поперечное сечение имеет вращательную симметрию относительно оси интересующей области, при этом ось интересующей области и ось пучка коаксиальны. Интересующая область содержит заданный объем, который охватывает целевую зону и, по меньшей мере, участок оси пучка. Процессор также управляет системой сфокусированного ультразвука высокой интенсивности для ультразвуковой обработки целевой зоны таким образом, чтобы ультразвуковая обработка целевой зоны происходила во время импульсной последовательности визуализации, используя силу акустического излучения, и реконструирует изображение, полученное с использованием силы излучения, используя данные магнитного резонанса. В медицинском устройстве, работающем с использованием машиночитаемого носителя, выполняется способ функционирования медицинского устройства для магнитно-резонансной визуализации с использованием силы акустического излучения. Использование группы изобретений позволяет сократить время конструирования изображения в реальном времени. 3 н. и 11 з.п. ф-лы, 6 ил.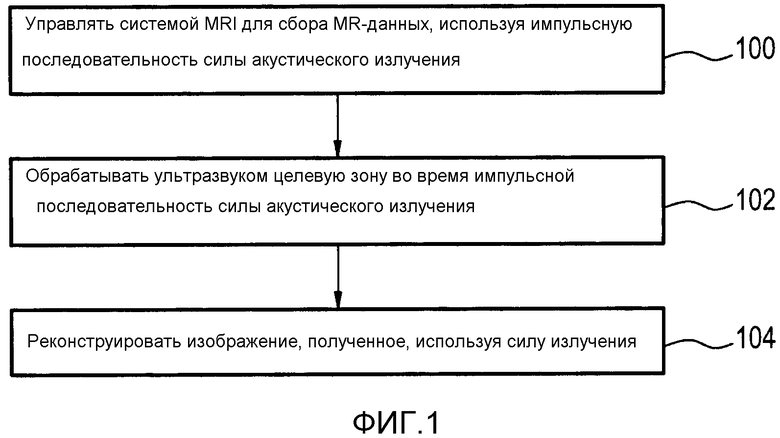
1. Медицинское устройство (200, 400) для магнитно-резонансной визуализации с использованием силы акустического излучения, при этом медицинское устройство содержит:
- систему (202) магнитно-резонансной визуализации для сбора данных (254) магнитного резонанса от субъекта (218) в зоне (208) визуализации;
- систему (222) сфокусированного ультразвука высокой интенсивности для направления ультразвука вдоль оси (240) пучка для ультразвуковой обработки целевой зоны (238), причем целевая зона находится в зоне визуализации;
- процессор (246) для управления медицинским устройством;
- память (252) для хранения машиночитаемых команд, причем исполнение команд побуждает процессор:
- управлять (100) системой магнитно-резонансной визуализации, чтобы собирать данные магнитного резонанса, используя импульсную последовательность (254), при этом импульсная последовательность содержит импульсную последовательность (500, 600) визуализации, используя силу акустического излучения, причем импульсная последовательность визуализации, используя силу акустического излучения, содержит возбуждающий импульс (512), при этом импульсная последовательность визуализации, используя силу акустического излучения, содержит многомерный градиентный импульс (514), подаваемый во время импульса радиочастотного возбуждения для выборочного возбуждения интересующей области (239), причем многомерный градиентный импульс является двумерным градиентным импульсом (514) для возбуждения интересующей области, так что интересующая область имеет двумерное поперечное сечение, причем двумерное поперечное сечение имеет вращательную симметрию относительно оси интересующей области, при этом ось интересующей области и ось пучка коаксиальны и
- при этом интересующая область содержит заданный объем, который охватывает целевую зону и, по меньшей мере, участок оси пучка; и
- управлять (102) системой сфокусированного ультразвука высокой интенсивности для ультразвуковой обработки целевой зоны таким образом, чтобы ультразвуковая обработка целевой зоны происходила во время импульсной последовательности визуализации, используя силу акустического излучения; и
- реконструировать (104) изображение (258), полученное с использованием силы излучения, используя данные магнитного резонанса.
2. Медицинское устройство по п. 1, в котором двумерный возбужденный объем имеет одно из следующего: круговое поперечное сечение, эллиптическое поперечное сечение, прямоугольное поперечное сечение или многоугольное поперечное сечение.
3. Медицинское устройство по п. 1 или 2, в котором импульсная последовательность визуализации дополнительно содержит одномерный градиентный импульс считывания, выровненный относительно оси пучка.
4. Медицинское устройство по п. 1 или 2, в котором система магнитно-резонансной визуализации содержит многоэлементную передающую катушку, причем импульсная последовательность выполнена с возможностью побуждать систему магнитно-резонансной визуализации ограничивать интересующую область до заданного объема, используя многоэлементную передающую катушку, использующую многомерное возбуждение.
5. Медицинское устройство по п. 1, в котором импульсная последовательность является любой из следующих: импульсная последовательность SENSE или импульсная последовательность GRAPPA.
6. Медицинское устройство по п. 1, в котором градиент кодирования движения является биполярным градиентным импульсом.
7. Медицинское устройство по п. 1, в котором исполнение команд побуждает процессор выполнять любое из следующего, используя изображение, полученное с использованием силы излучения: обнаружение пузырьков, обнаружение некроза ткани, определение смещения ткани, коррекцию целевого положения, оптимизацию сигнала запуска системы сфокусированного ультразвука высокой интенсивности или комбинацию вышеуказанного.
8. Медицинское устройство по п. 1, в котором возбуждающий импульс является одиночным возбуждающим импульсом.
9. Медицинское устройство по п. 1, в котором импульсная последовательность дополнительно содержит градиентный импульс (516) кодирования смещения, причем исполнение команд побуждает процессор управлять системой сфокусированного ультразвука высокой интенсивности для ультразвуковой обработки целевой зоны, используя систему сфокусированного ультразвука высокой интенсивности таким образом, чтобы ультразвуковая обработка целевой зоны происходила во время, по меньшей мере, части градиентного импульса кодирования смещения.
10. Медицинское устройство по п. 1, в котором импульсная последовательность дополнительно содержит последовательность импульсов (602) подавления наружного объема для ослабления сигнала магнитного резонанса за пределами интересующей области.
11. Медицинское устройство по п. 1, в котором импульсная последовательность содержит импульсную последовательность (454) тепловой визуализации для сбора тепловых данных магнитного резонанса (456), причем импульсная последовательность тепловой визуализации чередуется с импульсной последовательностью визуализации с использованием силы акустического излучения, при этом исполнение команд дополнительно побуждает процессор:
- управлять системой магнитно-резонансной визуализации для сбора тепловых данных магнитного резонанса, используя импульсную последовательность тепловой визуализации;
- реконструировать тепловую карту (458), используя тепловые данные магнитного резонанса; и
- отображать на устройстве (248) отображения тепловую карту и изображение, полученное с помощью силы излучения.
12. Медицинское устройство по п. 1, в котором система сфокусированного ультразвука высокой интенсивности имеет регулируемый фокус для управления местоположением целевой зоны, при этом исполнение команд дополнительно побуждает процессор:
- принимать план (460) лечения, указывающий местоположение целевой зоны внутри субъекта;
- управлять системой сфокусированного ультразвука высокой интенсивности, чтобы неоднократно управлять регулируемым фокусом, по меньшей мере, частично в соответствии с изображением, полученным с помощью силы излучения, и планом лечения в реальном времени.
13. Машиночитаемый носитель, содержащий машиноисполняемый код (260, 262, 470, 472) для магнитно-резонансной визуализации с использованием силы акустического излучения, при этом машиноисполняемый код исполняется процессором, управляющим медицинским устройством (200, 400), причем медицинское устройство содержит систему магнитно-резонансной визуализации для сбора данных (256) магнитного резонанса от субъекта (218) в зоне (208) визуализации, при этом медицинское устройство дополнительно содержит систему (222) сфокусированного ультразвука высокой интенсивности для направления ультразвука вдоль оси (240) пучка для ультразвуковой обработки целевой зоны (238), причем целевая зона находится в зоне визуализации, при этом исполнение команд побуждает процессор:
- управлять (100) системой магнитно-резонансной визуализации для сбора данных магнитного резонанса, используя импульсную последовательность (254), причем импульсная последовательность содержит импульсную последовательность (500, 600) визуализации, используя силу акустического излучения, при этом импульсная последовательность визуализации, используя силу акустического излучения, содержит возбуждающий импульс (512), причем импульсная последовательность визуализации, используя силу акустического излучения, содержит многомерный градиентный импульс (514), подаваемый во время радиочастотного возбуждающего импульса для выборочного возбуждения интересующей области, причем многомерный градиентный импульс является двумерным градиентным импульсом (514) для возбуждения интересующей области, так что интересующая область имеет двумерное поперечное сечение, причем двумерное поперечное сечение имеет вращательную симметрию относительно оси интересующей области, и ось интересующей области и ось пучка коаксиальны,
- при этом интересующая область (239) содержит заданный объем, который охватывает целевую зону и, по меньшей мере, участок оси пучка; и
- управлять (102) системой сфокусированного ультразвука высокой интенсивности для ультразвуковой обработки целевой зоны таким образом, чтобы ультразвуковая обработка целевой зоны происходила во время импульсной последовательности визуализации, используя силу акустического излучения; и
- реконструировать (104) изображение (258), полученное посредством силы излучения, используя данные магнитного резонанса.
14. Способ функционирования медицинского устройства для магнитно-резонансной визуализации с использованием силы акустического излучения, причем медицинское устройство содержит систему магнитно-резонансной визуализации для сбора данных магнитного резонанса от субъекта в зоне визуализации, при этом медицинское устройство дополнительно содержит систему сфокусированного ультразвука высокой интенсивности для направления ультразвука вдоль оси пучка для ультразвуковой обработки целевой зоны, причем целевая зона находится в зоне визуализации, при этом способ содержит этапы, на которых:
- управляют (100) системой магнитно-резонансной визуализации для сбора данных магнитного резонанса, используя импульсную последовательность (254), причем импульсная последовательность содержит импульсную последовательность (500, 600) визуализации, используя силу акустического излучения, при этом импульсная последовательность визуализации, используя силу акустического излучения, содержит возбуждающий импульс (512), причем импульсная последовательность визуализации, используя силу акустического излучения, содержит многомерный градиентный импульс (514), применяемый во время возбуждающего радиочастотного импульса для выборочного возбуждения интересующей области (239), причем многомерный градиентный импульс является двумерным градиентным импульсом (514) для возбуждения интересующей области, так что интересующая область имеет двумерное поперечное сечение, при этом двумерное поперечное сечение имеет вращательную симметрию относительно оси интересующей области и ось интересующей области и ось пучка коаксиальны,
при этом интересующая область содержит заданный объем, который охватывает целевую зону и, по меньшей мере, участок оси пучка; и
- управляют (102) системой сфокусированного ультразвука высокой интенсивности для ультразвуковой обработки целевой зоны таким образом, чтобы ультразвуковая обработка целевой зоны происходила во время импульсной последовательности визуализации, используя силу акустического излучения; и
- реконструируют (104) изображение (258), полученное с помощью силы излучения, используя данные магнитного резонанса.
| US 20110270136 А1, 03.11.2011 | |||
| Бойлер-гранулятор | 1980 |
|
SU948929A1 |
| WO 2012063162 А1, 18.05.2012 | |||
| US 2011080166 A1, 07.04.2011 | |||
| WILM B J ET AL | |||
| Reduced field-of-view MRI using outer volume suppression for spinal cord diffusion imaging | |||
| MAGNETIC RESONANCE IN MEDICINE, ACADEMIC PRESS, DULUTH, 01.03.2007, vol.57, no.3, p.625-630 | |||
| Тележка для подъема и транспортирования навоев | 1947 |
|
SU71531A1 |

