Область техники, которой относится изобретение
Изобретение относится к области авиастроения, а именно к летательным аппаратам вертикального взлета и посадки, и может быть использовано как персональное средство передвижения, как летающий кран, как платформа для сброса парашютиста, как средство разведки и атаки, как тяжелый беспилотный летательный аппарат (БПЛА) или дистанционно пилотируемый летательный аппарат (ДПЛА).
Уровень техники
Из уровня техники известен «летающий мотоцикл» (см. патент RU 108016, 29.10.2010 г.), обладающий системой спасения парашютного типа, содержащий крестообразную раму, 4 симметричных пропеллера и двигатель. Недостатками указанного устройства является то, что рама плоского балочного типа не обеспечивает необходимой жесткости конструкции, стойкой к прецессионным и нутационным колебаниям пропеллеров большой массы, что приводит к резонансным колебаниям, влечет образование усталостных дефектов в конструкции и усложняет задачу стабилизации аппарата в воздухе, отказ хотя бы одного пропеллера из четырех (а также любых других элементов конструкции, обеспечивающих работу пропеллера) ведет к аварии, а система спасения парашютного типа не предотвращает аварию, а лишь смягчает ее последствия. Сомнительна эффективность парашютной системы спасения на малых высотах полета. Пропеллеры большого диаметра и массы не могут быть быстро остановлены при аварии.
Также из уровня техники известен летающий мотоцикл по проекту Aero-Х Hoverbike (http://aerofex.com/theaerox/), содержащий двигатель внутреннего сгорания и два пропеллера для обеспечения тяги, а также систему управления на отклоняемых аэродинамических рулях. Недостатками указанного устройства является то, что привод обоих пропеллеров осуществляется от одного двигателя, а двухпропеллерная схема является неустойчивой, и отказ двигателя или любое нарушение в работе пропеллеров, трансмиссии, аэродинамических рулей или других систем, обеспечивающих их функционирование, ведет к немедленной раскрутке аппарата в воздухе и делает невозможным его спасение, а также его безопасное покидание пилотом. Рама плоского типа не обеспечивает необходимой жесткости конструкции, стойкой к прецессионным и нутационным колебаниям пропеллеров большой массы, что приводит к резонансным колебаниям, влечет образование усталостных дефектов в конструкции и усложняет задачу стабилизации аппарата в воздухе. Пропеллеры большого диаметра и массы не могут быть быстро остановлены при аварии.
Из уровня техники также известен летающий мотоцикл по проекту «МА hoverbike helicopter» (http://www.hover-bike.com/MA/product/hoverbike-helicopter/), обладающий, в разных конфигурациях, двумя или четырьмя пропеллерами. Недостатками указанного устройства является то, что привод пропеллеров осуществляется от одного двигателя, а двухпропеллерная схема является неустойчивой, отказ двигателя или любое нарушение в работе пропеллеров, трансмиссии, аэродинамических рулей или других систем, обеспечивающих их функционирование, ведет к немедленной раскрутке аппарата в воздухе и делает невозможным его спасение, а также его безопасное покидание пилотом. Это же справедливо и для четырехпропеллерного варианта, т.к. аппарат не может продолжить полет в случае отказа хотя бы одного пропеллера. Рама плоского типа не обеспечивает необходимой жесткости конструкции, стойкой к прецессионным и нутационным колебаниям пропеллеров большой массы, что приводит к резонансным колебаниям, влечет образование усталостных дефектов в конструкции и усложняет задачу стабилизации аппарата в воздухе. Пропеллеры большого диаметра и массы не могут быть быстро остановлены при аварии.
Известен летательный аппарат под названием «Moller M200G Volantor» (US) (http://www.moller.com/), содержащий платформу, фюзеляж, восемь роторно-поршневых двигателей Ванкеля, восемь пропеллеров в кольцевом ободе, кабину, сиденье пилота. Недостатками указанного устройства является единая топливная система и бак для питания всех двигателей, отказ которой приводит к остановке всех двигателей сразу, а посадка на авторотации невозможна в силу малого диаметра пропеллеров и тормозящих сил в двигателях, что не обеспечивает безопасности полета через резервирование. Высокая сложность управления двигателями Ванкеля за счет низкой, по сравнению с электродвигателями, приемистостью этих моторов, а также необходимость постоянно выдерживать высокие обороты для сохранения оптимального режима работы примененного двигателя вынуждает использовать систему управления шагом воздушного винта. Данная система увеличивает массу аппарата, снижает его надежность, добавляет лишний обслуживаемый узел у каждого мотора. Совокупность недостатков примененной системы движителя приводит к раскачкам аппарата даже в безветрие (хорошо заметным на опубликованных видео испытаний) с перспективой потери стабилизации и аварии. Неоднократные перегревы и возгорания двигателей вынудили конструкторов перейти с бензина на токсичную этаноло-водную смесь в качестве топлива, что не исправило проблемы пожароопасности полностью, зато снизило итак невысокую энерговооруженность и приемистость аппарата. Низкая надежность, ресурс и ремонтопригодность двигателей Ванкеля и системы управления шагом винта, низкая технологичность производства аппарата, а также громоздкая компоновка в форме тарелки с высокой парусностью поверхности, высокая итоговая стоимость аппарата, не позволили ему пойти в серийное производство.
Наиболее близким аналогом заявленного изобретения является летательный аппарат VC200 компании e-volo (http://www.e-volo.com/), содержащий 16 горизонтально расположенных электродвигателей с пропеллерами, кабину пилота и аккумуляторную батарею в ней, а также систему спасения всего аппарата парашютного типа. Недостатками наиболее близкого аналога является зависимая энергосистема, где все двигатели питаются от одной батареи с большой протяженностью силовой проводки от единственной батареи к двигателям, что не обеспечивает безопасности полета через резервирование, т.к. отказ батареи ведет к отказу всех двигателей сразу, а посадка на авторотации невозможна в силу малого диаметра пропеллеров и тормозящих сил в электродвигателях привода. Тяжелая конструкция фюзеляжа с работающими на излом карбоновыми элементами рамы пропеллеров не обеспечивает прочности и жесткости конструкции по сравнению с пространственными рамными конструкциями, увеличивает массу аппарата, а сами детали фюзеляжа уникальны по конструкции и не могут быть изготовлены пользователем самостоятельно или приобретены где-нибудь кроме производителя аппарата. Совокупность описанных недостатков увеличивает стоимость аппарата и не позволяет данному аппарату поднимать в воздух более собственной массы. Органы управления авиационного типа требуют от пилота навыков управления вертолетом. Сомнительна эффективность парашютной системы спасения на малых высотах полета.
Сущность изобретения
Задачей, решаемой заявленным изобретением, является создание малогабаритной, мобильной, экологичной, безопасной и удобной конструкции летательного аппарата вертикального взлета, обладающей высокой ремонтопригодностью, отказоустойчивостью, экономичностью в эксплуатации.
Технический результат заявленного изобретения заключается в повышении отказоустойчивости, ремонтопригодности и безопасности летательного аппарата вертикального взлета и посадки.
Технический результат заявленного изобретения достигается за счет того, что летательный аппарат вертикального взлета и посадки, включающий несущую раму пространственной конструкции, сиденье, органы управления, мотоустановки, систему управления, систему дистанционного управления, причем базовая несущая рама выполнена с центральной частью и с по меньшей мере двумя периферийными кластерами, при этом центральная часть и периферийные кластеры рамы выполнены пространственной конструкцией, причем каждый периферийный кластер выполнен ферменной конструкцией по меньшей мере из трех однотипных сегментов, соединенных между собой, при этом внутри каждого сегмента размещена мотоустановка, содержащая как минимум один двигатель и как минимум один пропеллер горизонтального вращения.
В частном случае выполнения заявленного изобретения периферийные кластеры пространственной рамы состоят из однотипных сегментов, полностью или частично составленных из идентичных деталей, причем деталь с одного сегмента может быть переставлена в другой сегмент
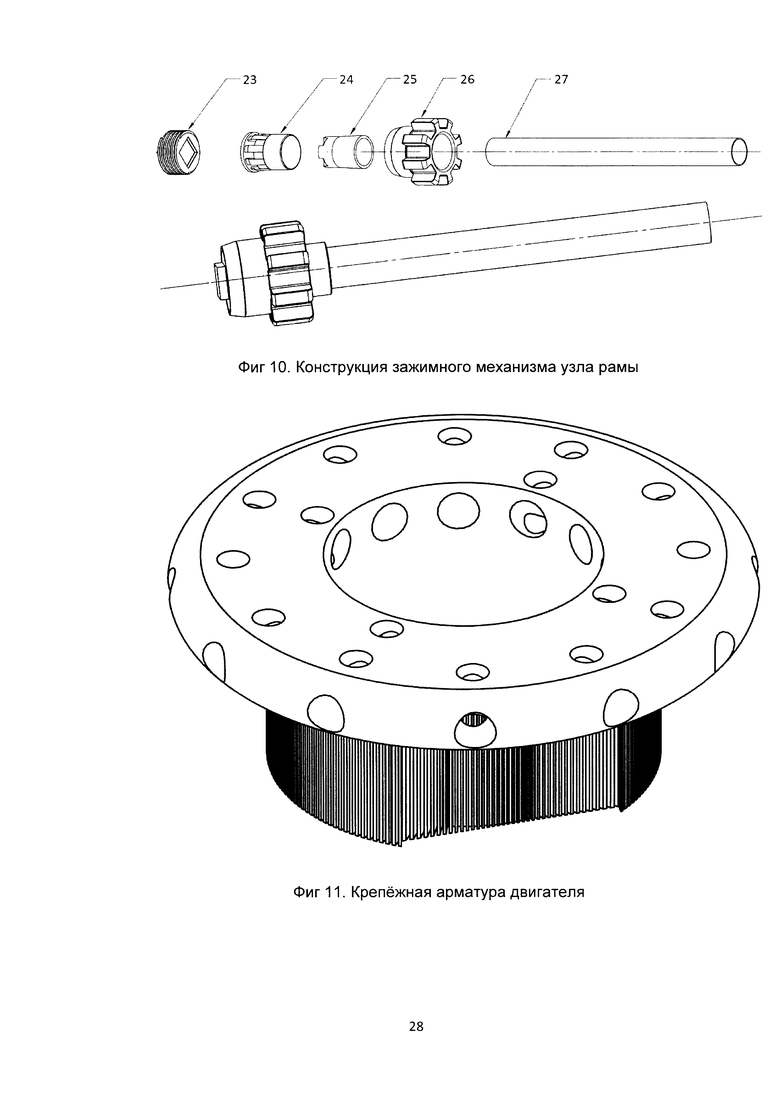
В частном случае выполнения заявленного изобретения рама пространственной конструкции содержит узлы с быстроразборным зажимным присоединением однотипных деталей.
В частном случае выполнения заявленного изобретения сегмент периферийного кластера рамы летательного аппарата ограничен по объему элементами фермы, образующими не менее трех граней, при этом по меньшей мере одна грань сегмента выполнена общей с гранью соседнего сегмента.
В частном случае выполнения заявленного изобретения сегменты рамы с мотоустановками размещены линейно и симметрично относительно друг друга по меньшей мере в одной горизонтальной плоскости.
В частном случае выполнения заявленного изобретения сегменты рамы с мотоустановками размещены в шахматном порядке со смещением относительно друг друга по меньшей мере в одной горизонтальной плоскости.
В частном случае выполнения заявленного изобретения каждая мотоустановка содержит по меньшей мере один электрический двигатель, при этом питание электрического двигателя осуществлено по меньшей мере от одного источника электрического питания, размещенного непосредственно на мотоустановке и расположенного в потоке воздуха пропеллера двигателя мотоустановки.
В частном случае выполнения заявленного изобретения мотоустановка содержит по меньшей мере два электрических двигателя размещенных соосно.
В частном случае выполнения заявленного изобретения летательный аппарат выполнен с возможностью аварийного переключения источников питания на питание других мотоустановок по кабелю системой коммутаторов.
В частном случае выполнения заявленного изобретения источник электрического питания выполнен в виде топливных ячеек, радиоизотопных и ядерных источников электрического питания.
В частном случае выполнения заявленного изобретения каждая мотоустановка с электрическим двигателем является самостоятельной единицей с собственным источником питания и контрольно-измерительной аппаратурой, получающей команды от центрального блока управления.
В частном случае выполнения заявленного изобретения каждая мотоустановка содержит пневматический двигатель, при этом питание каждого пневматического двигателя каждой мотоустановки осуществлено от установленного в центральной части рамы летательного аппарата компрессора через отдельный трубопровод с системой клапанов с электроприводом, регулирующих подачу сжатого газа на пневмодвигатели и их тягу, получая команды от центрального блока управления летательного аппарата,
В частном случае выполнения заявленного изобретения трубопроводы проложены внутри или снаружи элементов рамы.
В частном случае выполнения заявленного изобретения компрессор дополнительно содержит пневмоаккумулятор.
В частном случае выполнения заявленного изобретения каждая пневматическая мотоустановка является самостоятельной единицей с собственным каналом передачи пневматической энергии от центрального компрессора и контрольно-измерительной аппаратурой, получающая команды от центрального блока управления.
В частном случае выполнения заявленного изобретения дополнительно содержит дублирующий компрессор и дублирующие трубопроводы с независимыми клапанами, при этом дублирующий компрессор устанавливается внутри центральной части рамы летательного аппарата, совместно с основным.
В частном случае выполнения заявленного изобретения на центральной части рамы выполнено посадочное место пилота, установлены органы управления системы управления, органов ручного и ножного управления, блок рулевого управления, компрессора и его систем.
В частном случае выполнения заявленного изобретения штатные органы управления выполнены с возможностью демонтажа в сборе быстросъемным соединителем и использования их в качестве пульта дистанционного управления для дистанционного управления аппаратом в беспилотном режиме.
В частном случае выполнения заявленного изобретения каждая мотоустановка управляется индивидуально, при этом каждый периферийный кластер выполнен с равным числом мотоустановок, пропеллеры, которых вращаются по часовой стрелке, и мотоустановок, пропеллеры которых вращаются против часовой стрелки.
В частном случае выполнения заявленного изобретения каждая мотоустановка управляется индивидуально, при этом каждый периферийный кластер выполнен с мотоустановками, содержащими четное число пропеллеров противоположного вращения.
В частном случае выполнения заявленное изобретение содержит систему удержания заданной высоты, курса, маршрута, положения в пространстве.
В частном случае выполнения заявленное изобретение содержит систему автоматического управления, работающую в пилотируемом, автономном беспилотном и дистанционно управляемом режимах.
В частном случае выполнения заявленного изобретения в центре масс расположено подвесное устройство для подъема и транспортировки грузов на внешнем подвесе.
В частном случае выполнения заявленного изобретения периферийные кластеры выполнены с возможностью размещения блоков сканирования переднего и заднего пространства, вспомогательных устройств, освещения.
Краткое описание чертежей
Детали, признаки, а также преимущества настоящего изобретения следуют из нижеследующего описания вариантов реализации заявленного летательного аппарата вертикального взлета и посадки с использованием чертежей.
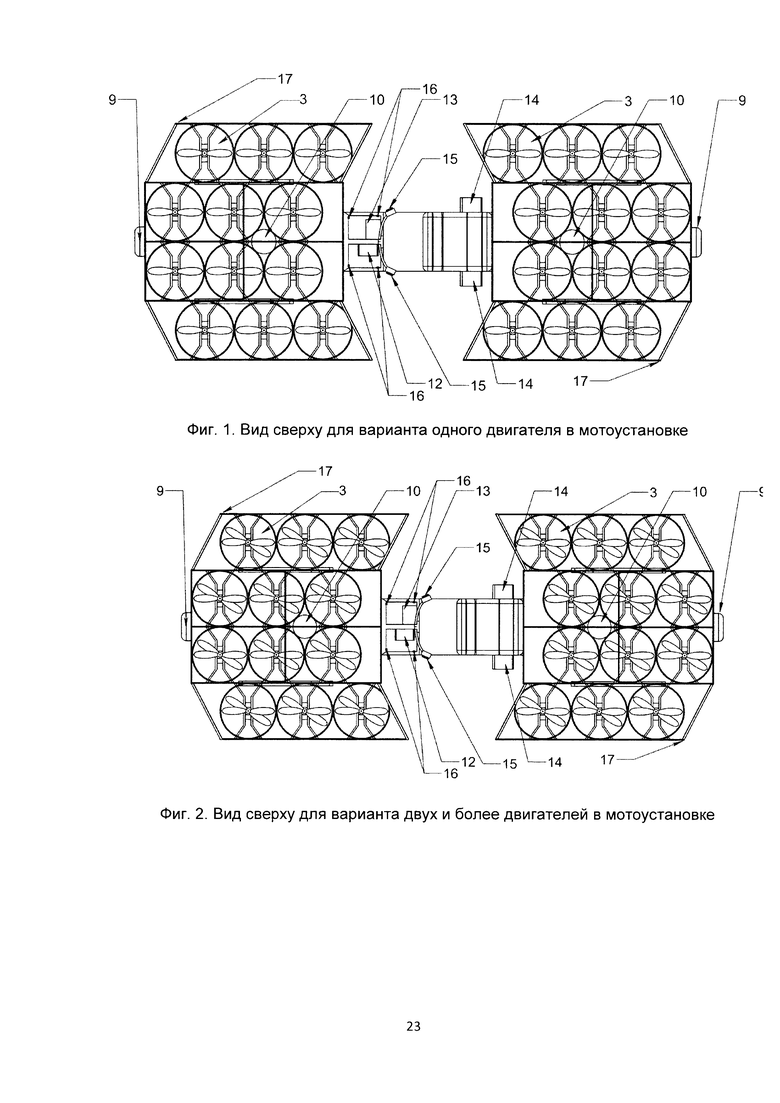
Фиг. 1 - Вид сверху для варианта одного двигателя в мотоустановке.
Фиг. 2 - Вид сверху для варианта двух и более двигателей в мотоустановке.
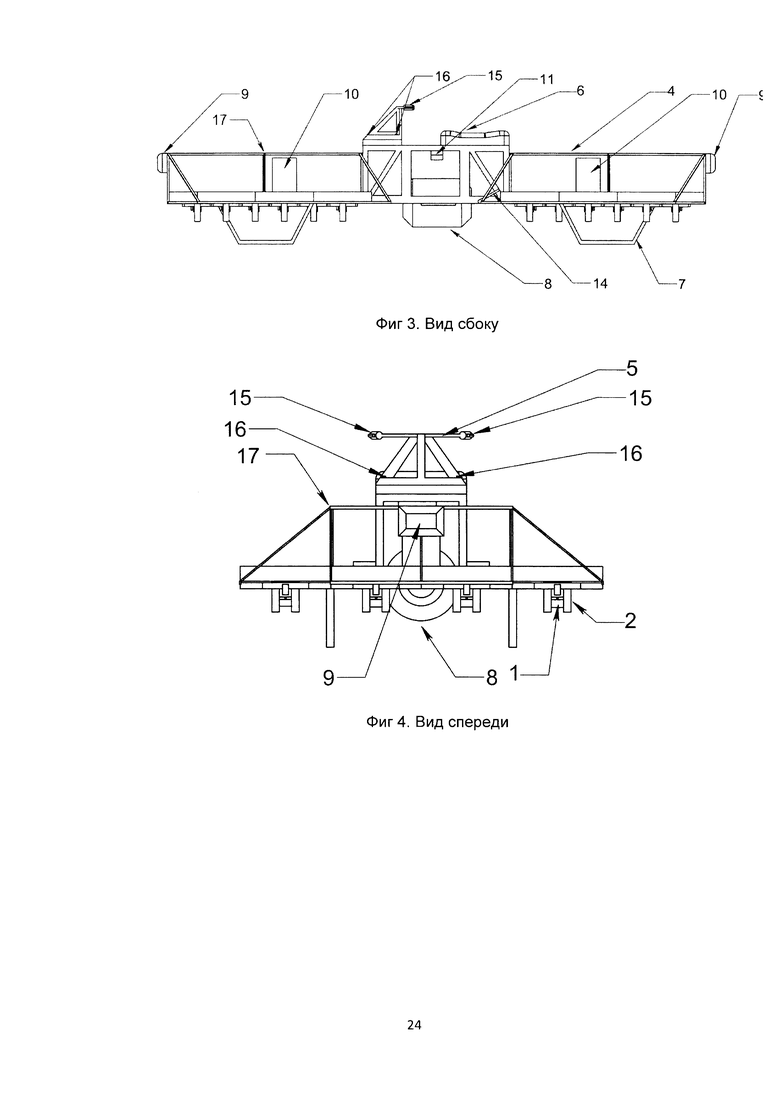
Фиг. 3 - Вид сбоку.
Фиг. 4 - Вид сбоку.
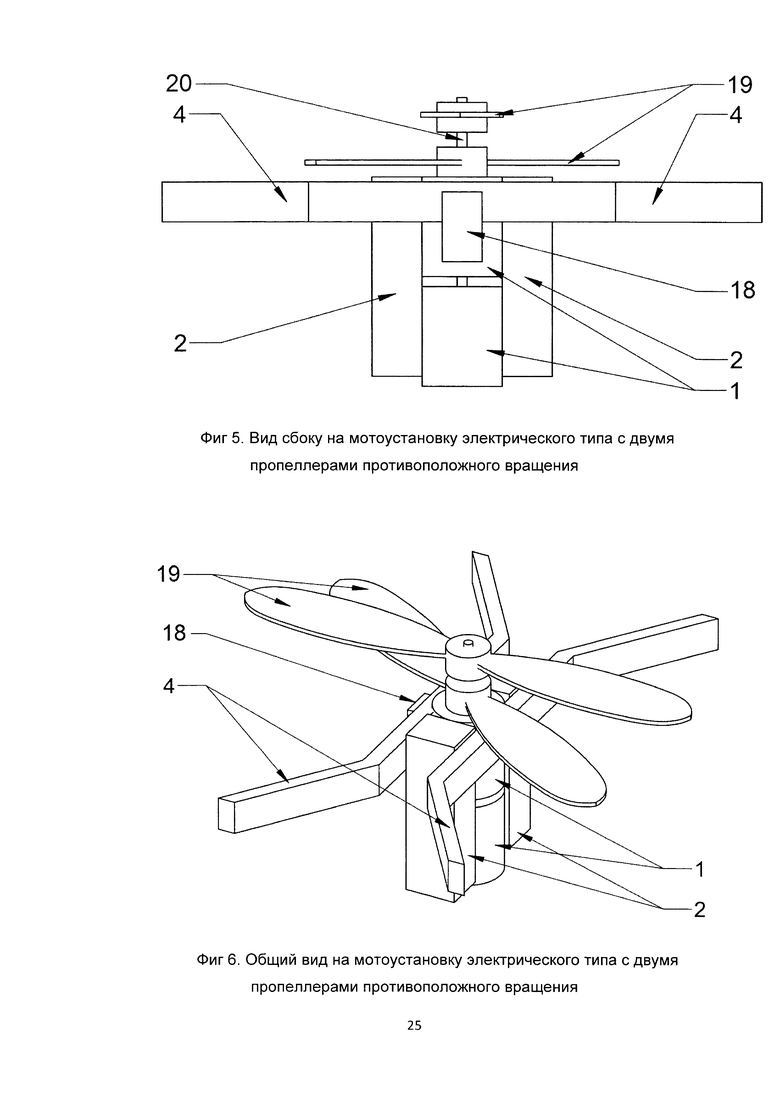
Фиг. 5 - Вид сбоку на мотоустановку электрического типа с двумя пропеллерами противоположного вращения.
Фиг. 6 - Общий вид на мотоустановку электрического типа с двумя пропеллерами противоположного вращения.
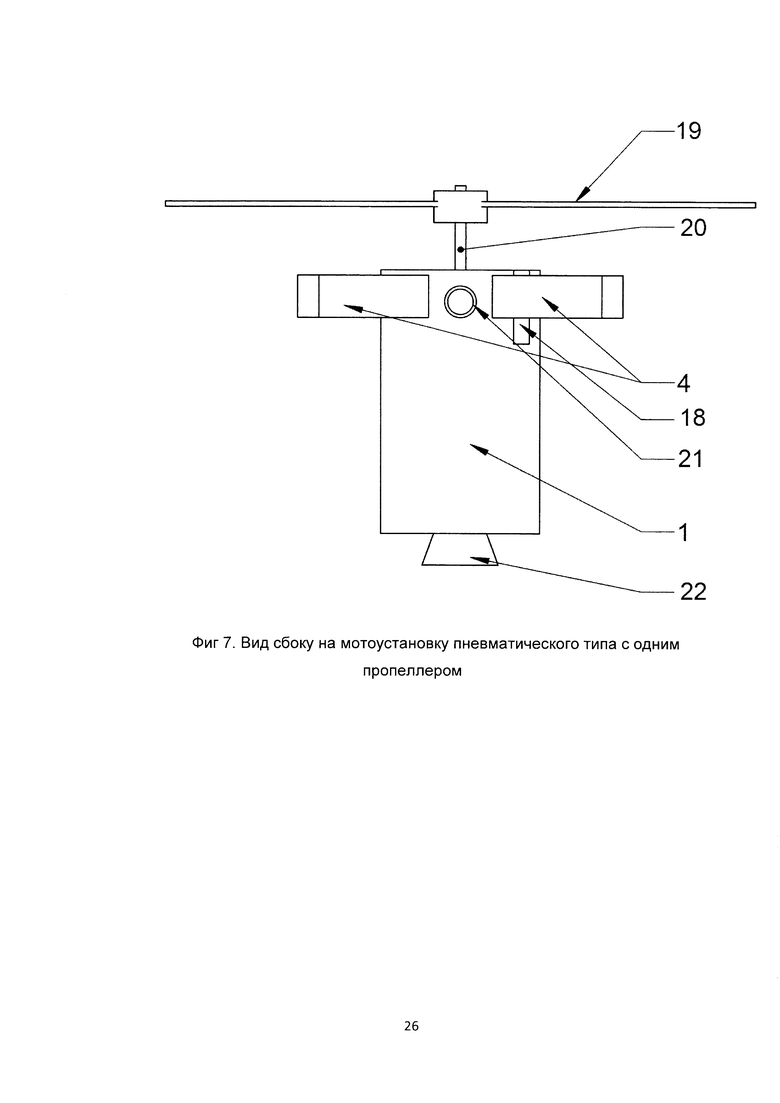
Фиг. 7 - Вид сбоку на мотоустановку пневматического типа с одним пропеллером.
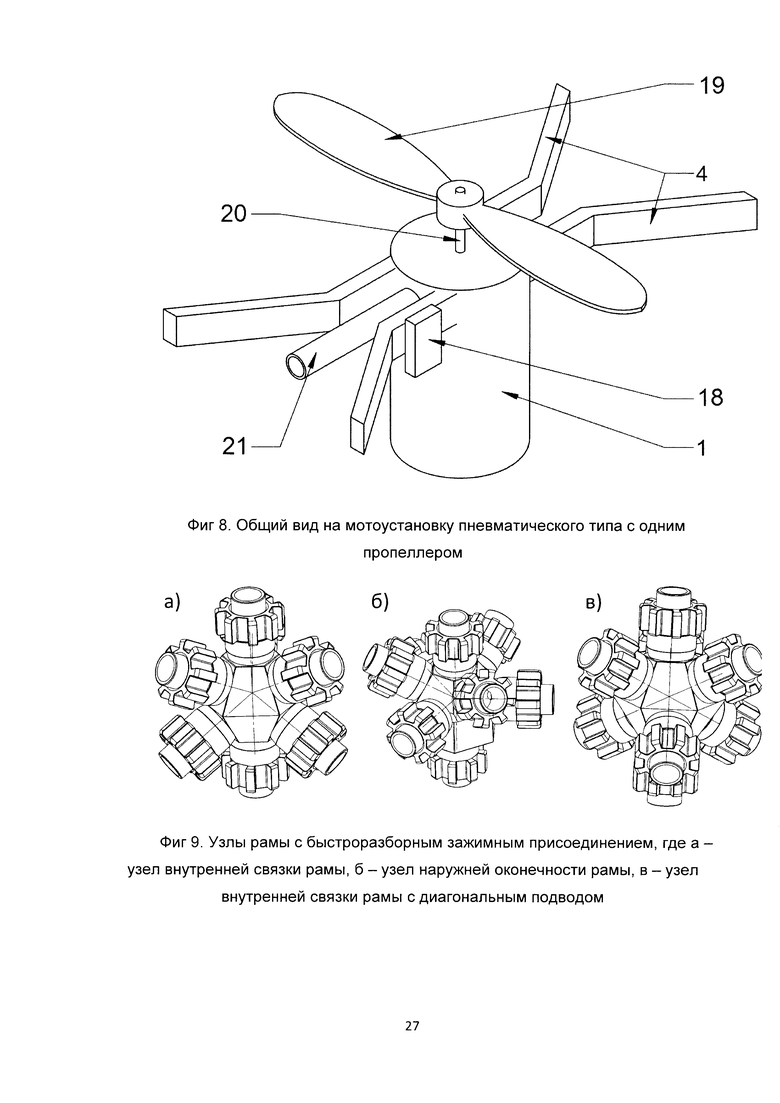
Фиг. 8 - Общий вид на мотоустановку пневматического типа с одним пропеллером.
Фиг. 9 - Узлы рамы с быстроразборным зажимным присоединением, где а - узел внутренней связки рамы, б - узел наружной оконечности рамы, в - узел внутренней связки рамы с диагональным подводом.
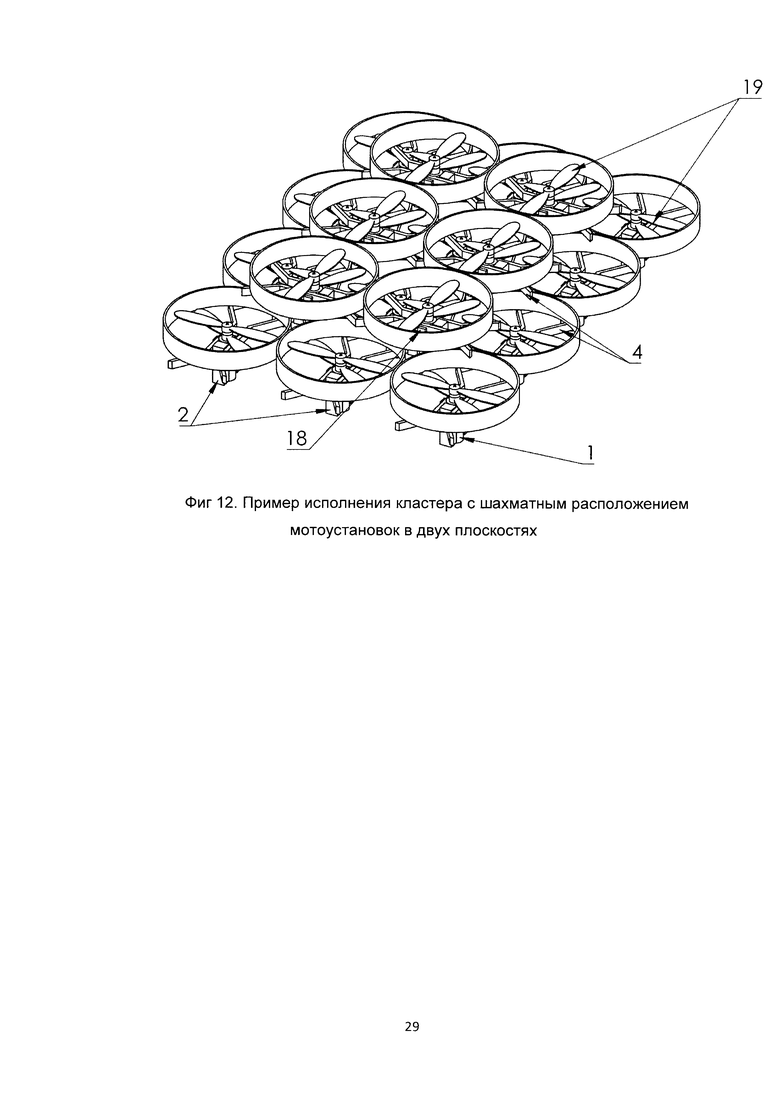
Фиг. 10 - Конструкция зажимного механизма узла рамы.
Фиг. 11 - Крепежная арматура двигателя.
Фиг. 12 - Пример исполнения кластера с шахматным расположением мотоустановок в двух плоскостях.
На фигурах цифрами обозначены следующие позиции:
1 - двигатель, 2 - электрический источник питания (для варианта электрического привода), 3 - мотоустановка в составе кластера, 4 - рама, 5 - блок рулевого управления, 6 - место пилота, 7 - посадочное шасси, 8 - компрессор (для варианта пневматического привода), 9 - ультразвуковой дальномер с радаром, 10 - вспомогательный источник питания, 11 - центральный блок управления (автопилот), 12 - аккумулятор блока рулевого управления, 13 - блок управления рулевой колонки с радиопередатчиком, 14 - педали управления, 15 - ручки управления на руле, 16 - быстросъемные защелки крепления рулевой колонки, 17 - узлы рамы, 18 - контроллер двигателя, 19 - пропеллер, 20 - вал привода пропеллера, 21 - входной патрубок сжатого газа, 22 - выходной патрубок отработанного газа, 23 - порт узла, 24 - вставка с храповиком и цанговым зажимом, обжимающая элемент рамы и приводящая элемент рамы к круглой форме, если он изначально не круглый, 25 - эластичная втулка, обеспечивающая обжим элемента рамы, а также имеющая расширение к концу втулки, позволяющее скомпенсировать боковой изгиб элемента рамы, 26 - гайка, 27 - элемент рамы (раскос, стойка).
Раскрытие изобретения
Заявляемая конструкция летательного аппарата содержит кластеры, составленные каждый из трех или более мотоустановок, состоящих каждая, как минимум, из одного мотора, электрического или пневматического, и, как минимум, одного пропеллера горизонтального вращения, независимых друг от друга электрически и механически, управляемых индивидуально, вращающихся поровну по часовой и против часовой стрелки (если пропеллеров больше одного). Каждая мотоустановка содержит индивидуальный источник питания или использует индивидуальный канал передачи энергии. Неисправность одной или нескольких мотоустановок не ведет к опрокидыванию или раскрутке аппарата, т.к. потерянная тяга и крутящий момент автоматически перекладываются на исправные мотоустановки кластера, при условии достаточного запаса мощности исправных мотоустановок, причем исправные мотоустановки полностью независимы от неисправных. Это делает не нужным установку каких-либо дополнительных систем спасения, как для пилота, так и для аппарата в целом, достигается цель отказоустойчивости во всем диапазоне высот полета. Пропеллеры малого диаметра и массы могут быть быстро остановлены как за счет естественного торможения двигателем, так и принудительно, созданием двигателем обратного усилия, чем достигается эксплуатационная безопасность.
Система безопасности аппарата также реализована, во-первых, группой оптических сенсоров, расположенных непосредственно у пропеллеров, по сигналу с которых (в случае попадания предметов в зону пропеллера) происходит экстренный останов данного пропеллера. В случае работы аппарата в условиях сильной запыленности оптические сенсоры могут быть заменены емкостными или радиолокационными сенсорами, при этом радиолокационные обеспечивают большее покрытие, а емкостные - большую избирательность. Во-вторых, системой оптических датчиков внутри полых элементов рамы, состоящей из приемников и передатчиков оптических сигналов, работающих постоянно в течение полета. В случае разлома элемента рамы канал оптической связи рвется, и центральный блок управления (автопилот) получает сигнал о месте повреждения рамы.
Несущая рама летательного аппарата объемной пространственной конструкции обеспечивает необходимую жесткость при малом весе. Высокая ремонтопригодность достигается блочной конструкцией аппарата с большим количеством повторяющихся элементов, а также минимальным количеством механических подвижных и изнашивающихся частей и точек обслуживания. В зависимости от конфигурации, летательный аппарат может иметь электрический или пневматический привод, чем достигается эксплуатационная экономичность.
Летательный аппарат (ЛА) вертикального взлета и посадки состоит из несущей рамы, системы автоматического управления, органов ручного управления, посадочного места пилота, мотоустановок, объединенных в кластеры, и вспомогательных систем.
Рама летательного аппарата выполнена пространственной конструкцией с центральной частью и частями, расположенными спереди и сзади летательного аппарата по направлению полета. При этом центральная часть рамы летательного аппарата представляет собой ферму и предназначена для установки органов управления, посадочного места пилота, центрального блока управления (автопилота), органов ручного и ножного управления, отъемного блока рулевого управления, выполняющего также роль пульта дистанционного управления аппаратом, компрессора (для варианта пневматического исполнения) и его систем. Форма центральной части определяется эргономикой размещения пилота в зависимости от его массы, роста, необходимости нести амуницию.
Передняя и задняя части рамы предназначены для размещения мотоустановок, основных и резервных источников питания, электрической и трубной проводки, блоков сканирования переднего и заднего пространства, вспомогательных устройств, таких как фары, бамперы и т.п. Эти части рамы представляют собой фермы и реализованы в виде набора однотипных сегментов, соединенных между собой, внутри которых размещены однотипные мотоустановки, совместно с рамой образующие передний и задний кластер мотоустановок, причем устанавливается не более одной мотоустановки в сегменте. Сегментом называется участок рамы, ограниченный по объему элементами фермы (раскосами, стойками, силовыми поясами и узлами), но не имеющий их внутри, имеющий не менее трех граней, при этом хотя бы одна грань является общей с соседним сегментом. При этом соседние сегменты полностью или частично идентичны по использованным в их составе элементам фермы (раскосам, стойкам, силовым поясам и узлам), что позволяет использовать в конструкции кластера мотоустановок ограниченное число однотипных деталей, а также переставлять эти детали между сегментами, чем обеспечивается ремонтопригодность. Этим также обеспечивается гибкость в конструировании аппаратов разной грузоподъемности, т.к. число сегментов (и мотоустановок в них) может быть легко увеличено как продолжение существующей рамы (кластера). Форма сегментов и порядок их установки выбирается таким образом, чтобы минимизировать свободное пространство между мотоустановками. Допустимо линейное размещение, когда мотоустановки располагаются в одной плоскости, симметрично относительно друг друга, и размещение в шахматном порядке, когда мотоустановки располагаются со смещением относительно друг друга в горизонтальной и/или в вертикальной плоскостях, что является более универсальным и предпочтительным вариантом.
Летательный аппарат содержит, по меньшей мере, два кластера, при этом каждый кластер содержит, по меньшей мере, три мотоустановки. Количество мотоустановок в кластере определяется из необходимой грузоподъемности аппарата и располагаемой тяги одной мотоустановки.
Рама летательного аппарата изготавливается из легких профильных материалов, таких как карбон, алюминий, дюраль-алюминий или титан (предпочтительным является карбон), и представляет собой пространственную конструкцию из раскосов круглого, овального и прямоугольного сечения, объединенных в ферму через узлы с зажимами. Расположение зажимов определяется количеством и формой подходящих к узлу раскосов, углами, с которыми они подходят, а также сечением раскосов. Согласно этому на поверхности узла формируются точки стыковки (порты) в виде круглого цилиндра с резьбой. В случае подвода полого раскоса порт содержит штырь, формой и сечением соответствующий внутреннему сечению полого раскоса. Раскос подводится к точке стыковки (одевается на штырь, если он полый), затем на него одевается эластичная втулка из мягкого материала (резины, полиэтилена, силикона, эластичного пластика, при этом резина является наиболее предпочтительной из соображений цены и морозостойкости), своей формой соответствующая наружной форме (сечению) раскоса, а сверху - вставка с цангой и храповиком, помимо фиксации гайки и раскоса, приводящая форму раскоса к круглой, если наружная форма (сечение) раскоса изначально не круглая, и затягивается гайкой. Под действием давления гайки эластичная втулка деформируется в ширину и надежно зажимает раскос на узле, дополнительно фиксируясь цангой вставки, делая соединение разборным и ремонтопригодным. Сами раскосы изготавливаются из профилей стандартных типов и сечений, широко представленных на рынке от разных производителей, что делает возможным их покупку пользователем независимо от производителя ЛА и самостоятельное изготовление необходимого раскоса из них. Узел, порт, вставка и гайка изготавливаются из того же материала, что и рама. Если разборность узла не требуется, зажимное соединение может быть заменено на склейку, сварку или склепку в точках стыковки, причем предпочтительным вариантом является склейка, как универсальный и не нарушающий структуру узла и раскоса вариант соединения.
Необходимая жесткость и защита пилота и окружающих от воздействия вращающихся пропеллеров или их осколков при разрушении достигается объемной конструкцией рамы и защитными ограждениями пропеллеров, расположенных внутри сегментов рамы. Мотоустановки собираются на арматуре, изготовленной, предпочтительно, из того же материала, что и рама, и посредством данной арматуры крепятся к раме одним из описанных для узла способом. К раме также крепятся электрическая и трубная проводка, датчики и системы аппарата, рулевое управление и место пилота, источники питания и энергии. Внутри полых элементов рамы проходят оптические каналы системы контроля целостности рамы, а также может быть проложена проводка (электрическая и трубная) в тех случаях, когда требуется повышенная защищенность проводки от внешних механических воздействий.
По первому варианту исполнения изобретения мотоустановка содержит один или более электрических двигателей, расположенных соосно, с присоединенными к ним пропеллерами горизонтального вращения. Питание двигателей осуществляется от одного источника питания (ИП) или группы ИП, размещенных непосредственно на крепежной арматуре двигателя и находящихся в потоке воздуха от пропеллера данной мотоустановки. Также могут быть использованы вспомогательные ИП, расположенные вне мотоустановки и питающие сразу несколько мотоустановок, но не все сразу от одного ИП. Возможно расположение вспомогательных ИП внутри полых элементов рамы, в свободном пространстве между пропеллерами кластера, над и под мотоустановками. Предпочтительным является расположение в свободном пространстве между пропеллерами кластера.
Каждая мотоустановка содержит индивидуальный контроллер двигателей, принимающий команды от центрального блока управления (автопилота) летательного аппарата и осуществляющий управление электродвигателями мотоустановки, контроль исправности и контроль соответствия заданному режиму работы двигателей и ИП мотоустановки, используя датчики тока, напряжения, температуры, оборотов, вибрации. Датчики тока располагаются на входе в мотоустановку по электрической схеме и измеряют потребляемый мотоустановкой от ИП ток. Датчики напряжения расположены на печатной плате контроллера и подключены к измеряемым точкам в мотоустановке: входному напряжению ИП, напряжению на двигателе, напряжению питания электронных элементов контроллера. Датчики оборотов расположены у электродвигателей и измеряют обороты и факт вращения по изменению магнитного поля двигателей при вращении. Датчики температуры располагаются на печатной плате контроллера и в контролируемых точках: на ИП, на обмотках двигателей, на силовых ключах. Датчики вибрации расположены на точках крепления двигателей к раме. В случае использования перезаряжаемых ИП, контроллер двигателя также осуществляет контроль зарядки ИП мотоустановки. Таким образом, каждая мотоустановка является самостоятельной функциональной единицей.
Между центральным блоком управления (автопилотом) и мотоустановками проложен кабель, по которому передаются команды управления (основной канал) от центрального блока управления (автопилота), расположенного в центре масс летательного аппарата, к мотоустановкам и осуществляется медленная зарядка ИП мотоустановок малым током в случае использования перезаряжаемых ИП. Существует возможность переключать питание с соседних мотоустановок на требуемую мотоустановку системой коммутаторов, расположенных в мотоустановках, по данному кабелю. Быстрая зарядка большими токами осуществляется подключением зарядного устройства непосредственно к ИП мотоустановки.
Резервный канал управления (передачи команд) мотоустановками реализуется либо другим кабелем, проложенным иным маршрутом (во избежание одновременного повреждения обоих кабелей), либо по радиоканалу, при этом вариант радиоканала позволяет сэкономить вес проводки, а вариант кабеля улучшает помехозащищенность канала. Кабели прокладываются матричным методом, когда один канал управления прокладывается кабелями, проходящими поперечно оси симметрии аппарата, а второй канал - продольно (такая прокладка возможна за счет кластерной конструкции передней и задней частей рамы). В этом случае к каждой мотоустановке подходит два кабеля с разных сторон и без повторяющихся участков маршрута прокладки. В случае использования радиоканала приемопередатчики устанавливаются в каждой мотоустановке и в центральном блоке управления (автопилоте). Для синхронизации передачи используется протокол с разрешением коллизий по приоритету передатчика. Наивысший приоритет имеет центральный блок управления (автопилот), далее приоритеты распределяются между мотоустановками от наивысшего к наименьшему, причем наивысший приоритет имеют дальние от центра масс мотоустановки, как вносящие наибольший вклад в управляющее воздействие на аппарат за счет большего рычага к центру масс.
В качестве ИП возможно использование генераторов и турбогенераторов всех видов, аккумуляторов всех видов, химических источников тока всех видов, топливных ячеек всех видов, радиоизотопных и ядерных элементов питания всех видов. Установка и подключение перечисленных типов ИП осуществляется согласно руководству завода-изготовителя относительно используемой модели ИП. Предпочтительными являются перезаряжаемые химические источники тока (аккумуляторы).
По второму варианту исполнения изобретения мотоустановка представляет собой пневматический двигатель, расположенный горизонтально, с присоединенным к нему пропеллером горизонтального вращения, выхлоп отработанного газа осуществляется вниз.
Питание каждого пневматического двигателя каждой мотоустановки осуществляется от установленного в центральной части летательного аппарата компрессора через трубопроводы и систему клапанов с электроприводом, регулирующих подачу сжатого газа на пневмодвигатели и их тягу, получающих команды от центрального блока управления (автопилота) летательного аппарата. Компрессор представляет собой двигатель внутреннего сгорания или турбоагрегат с блоком сжатия воздуха, питаемый топливом от бака, расположенного над компрессором и закрепленного на его корпусе. Для нужд временного резервирования компрессор содержит пневмоаккумулятор, расположенный сбоку от компрессора и закрепленный на его корпусе, предназначенный для временного питания двигателей в случае отказа основного компрессора. Переключение на пневмоаккумулятор происходит автоматически при помощи трехходового клапана, установленного на пневмоаккумуляторе в разрыве трубопровода между пневмоаккумулятором и компрессором, с отводом в трубопроводы питания двигателей, и реагирующего на неравенство давлений по обеим сторонам (компрессора и пневмоаккумулятора), переключающегося в сторону источника большего давления. В роли компрессора наиболее оправдано применение пневматических вспомогательных силовых установок авиационной техники, таких как отечественный двигатель АИ-9, и подобных.
Сжатый воздух от компрессора поступает к пневмодвигателям по независимым трубопроводам, каждый трубопровод к своему двигателю, проложенным внутри или снаружи элементов рамы, при этом внутренняя прокладка улучшает защищенность трубопроводов, а внешняя прокладка - охлаждение. Предпочтительна наружная прокладка, для улучшения ремонтопригодности. Клапаны управления пневмодвигателем находятся по обоим концам каждого трубопровода, причем один из пары клапанов может быть дискретным, предназначенным лишь для запирания аварийного трубопровода, а второй должен быть регулировочным. Центральный блок управления (автопилот) отдает команды контроллеру двигателя, и тот управляет степенью открытия регулировочных клапанов путем изменения подводимых к ним по проводам электрических сигналов и, тем самым, регулирует расход газа в данном канале и, следовательно, подводимую к пневмодвигателю мощность и тягу данной мотоустановки.
Установленный на пневмодвигатель контроллер осуществляет непрерывный контроль исправности пневмодвигателя по показаниям датчиков давления, оборотов, температуры, вибрации и может самостоятельно принимать решение об отключении аварийного двигателя путем перекрывания клапанами подводящих трубопроводов с оповещением центрального блока управления (автопилота). Центральный блок управления (автопилот) также может отдать команду блоку управления двигателя на отключение пневмодвигателя. Датчики оборотов расположены у пневмодвигателей и измеряют обороты и факт вращения по изменению магнитного поля лопаток пневмодвигателя при его вращении. Датчики температуры располагаются на печатной плате контроллера и в контролируемых точках: на клапанах, на корпусах двигателей, на трубопроводе. Датчики вибрации расположены на точках крепления двигателей к раме. Датчики давления установлены на плате контроллера и подключены к контрольным точкам на трубопроводе, двигателе и клапанах и измеряют давления относительно атмосферы и перепады давлений между контрольными точками. Передача команд контроллеру и сбор диагностической информации от контроллера осуществляется по кабелям управления и радиоканалу эквивалентно предыдущему варианту изобретения.
Возможна установка дублирующего компрессора и дублирующих трубопроводов с независимыми (от основного) клапанами для компенсации повреждений в полете, при этом дублирующий компрессор устанавливается внутри центральной части рамы летательного аппарата, совместно с основным, таким образом, чтобы не нарушить центр тяжести аппарата, а дублирующие трубопроводы прокладываются внутри кластера маршрутом, не совпадающим с маршрутом основных трубопроводов, чтобы избежать их одновременного разрушения. То есть матричным методом, когда один канал управления прокладывается трубопроводами, проходящими поперечно оси симметрии аппарата, а второй канал - продольно (такая прокладка возможна за счет кластерной конструкции рамы с повторяющимися элементами). В этом случае к каждому пневмодвигателю подходит два трубопровода с разных сторон и без повторяющихся участков маршрута прокладки. Компрессоры имеют независимые системы управления, топливную аппаратуру и баки. Возможна установка отдельного источника давления со сжатым или сжиженным газом вместо основного или дублирующего компрессора.
Система автоматического управления выполняет задачу стабилизации углового и пространственного положения ЛА, а также стабилизацию заданной высоты, путем избирательного изменения тяги мотоустановок кластеров, путем передачи команд управления контроллерам двигателей каждой мотоустановки. Система автоматического управления состоит их трех независимых плат центрального блока управления (автопилота), контроль исправности которых осуществляется отдельным контроллером, мажоритарным способом, по принимаемым ими решениям. Каждая плата центрального блока управления (автопилота) содержит набор инерциальных датчиков (трехосевой гироскоп и трехосевой акселерометр), магнитный датчик (компас), барометрический датчик высоты и датчик воздушной скорости, выполненный по схеме дифференциального датчика давления с воздухозаборником типа «трубка Пито», пирометрические датчики горизонта, а также приемник спутниковой навигационной системы. Показания датчиков собираются в центральном процессоре, где комплексируются и корректируются с помощью фильтра Калмана, на выходе которого получаются истинные значения углов ориентации аппарата, а также угловых и линейных скоростей и ускорений. На основании этих параметров центральный процессор рассчитывает необходимую тягу индивидуально для каждого двигателя мотоустановок либо решением уравнений Навье-Стокса, где мотоустановки кластера представлены векторным полем (метод дает самый точный результат для универсальной размерности кластера, но и требует максимальных вычислительных ресурсов), либо векторным разложением тяги каждой мотоустановки на центр масс ЛА в трехмерном пространстве (метод требует тригонометрических вычислений с плавающей точкой для каждой мотоустановки, но при этом меньше вычислительных ресурсов, чем уравнения Навье-Стокса), либо через закон Гука с диффузией, где каждая мотоустановка представлена инерционным упругим элементом, т.к. работает в упругой газовой (воздушной) среде, а взаимосвязь соседних мотоустановок (градиент тяги) описана уравнением диффузии на соседние мотоустановки (метод дает наименее точный результат за счет зависимости от упругости среды, определяемой высотой полета, зато может быть легко сведен к целочисленным вычислениям и через коэффициенты диффузии возможно гибко регулировать нагрузку на моторы кластера, располагающиеся на разных удалениях от центра масс, выравнивая их износ). Оптимальным методом является векторное разложение.
В случае ручного управления пилотом система управления аппаратом имитирует известные и привычные пользователю схемы управления наземного транспорта, для чего содержит органы управления, присущие наземным транспортным средствам - руль и ручки или педали акселератора и тормоза, для варианта только ручного или смешанного ручного/ножного управления - чем обеспечивается техника управления, идентичная наземному транспортному средству, мотоциклу или автомобилю, путем обработки центральным блоком управления (автопилотом) сигналов органов управления и преобразования их в команды для мотоустановок. Высота полета устанавливается отдельной ручкой и автоматически удерживается системой управления (автопилотом) в течение всего полета по показаниям группы датчиков, таких как приемник спутниковой навигационной системы, барометрический датчик высоты, оптический (для малых высот) и/или радиовысотомер (для больших высот), радар, ультразвуковой дальномер (для радиопрозрачных препятствий). Это и делает возможным применение схемы управления наземного транспорта на летательном аппарате и снижает порог входа для пользователя, избавляет его от необходимости изучать технику пилотирования летательных аппаратов. Причем блок рулевого управления может быть снят с аппарата в сборе путем разъединения быстросъемных защелок «лягушек» и разъединением штыревого разъема, связывающего блок рулевого управления с центральным блоком управления (автопилотом) по проводной связи, и использоваться как самостоятельный пульт дистанционного управления аппаратом в беспилотном и дистанционно пилотируемом режимах, для чего блок управления содержит собственный подзаряжаемый источник питания и радио приемопередатчик.
Таким образом, совокупность признаков предлагаемого летательного аппарата, реализация которых может быть выполнена в соответствии фиг. 1 - фиг. 8, позволяет получить малогабаритную, мобильную, экологичную, безопасную и удобную конструкцию летательного аппарата вертикального взлета, обладающего высокой ремонтопригодностью, отказоустойчивостью, экономичностью в эксплуатации, что позволяет использовать летательный аппарат службами экстренного реагирования, медицинской и почтовой службой, как средство ближних перелетов в горной, заболоченной и прочих труднопроходимых местностях, как средство геологоразведки и армейской разведки, как средство осмотра и ремонта линий электропередач, как транспортное средство десантных групп, в складской логистике и охране, как средство эвакуации (в беспилотном или дистанционно-пилотируемом режиме), как летающий кран при возведении инженерных и фортификационных сооружений, как средство развлечений.
Изобретение относится к области авиастроения, а именно к летательным аппаратам вертикального взлета и посадки. Летательный аппарат включает несущую раму пространственной конструкции, сиденье, органы управления, мотоустановки, систему управления, систему дистанционного управления. Базовая несущая рама выполнена с центральной частью и с по меньшей мере двумя периферийными кластерами. Центральная часть и периферийные кластеры рамы выполнены пространственной конструкцией. Каждый периферийный кластер выполнен ферменной конструкцией по меньшей мере из трех однотипных сегментов, соединенных между собой. Внутри каждого сегмента размещена мотоустановка, содержащая как минимум один двигатель и как минимум один пропеллер горизонтального вращения. Использование изобретения позволяет повысить отказоустойчивость и безопасность, улучшить ремонтопригодность летательного аппарата вертикального взлета и посадки. 23 з.п. ф-лы, 12 ил.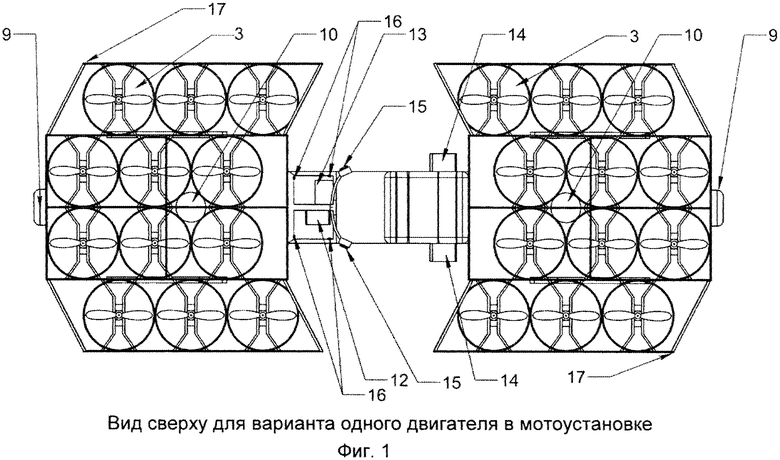
1. Летательный аппарат вертикального взлета и посадки, включающий несущую раму пространственной конструкции, сиденье, органы управления, мотоустановки, систему управления, систему дистанционного управления, отличающийся тем, что базовая несущая рама выполнена с центральной частью и с по меньшей мере двумя периферийными кластерами, при этом центральная часть и периферийные кластеры рамы выполнены пространственной конструкцией, причем каждый периферийный кластер выполнен ферменной конструкцией по меньшей мере из трех однотипных сегментов, соединенных между собой, при этом внутри каждого сегмента размещена мотоустановка, содержащая как минимум один двигатель и как минимум один пропеллер горизонтального вращения.
2. Летательный аппарат по п. 1, отличающийся тем, что периферийные кластеры пространственной рамы состоят из однотипных сегментов, полностью или частично составленных из идентичных деталей, причем деталь с одного сегмента может быть переставлена в другой сегмент.
3. Летательный аппарат по п. 1, отличающийся тем, что рама пространственной конструкции содержит узлы с быстроразборным зажимным присоединением однотипных деталей.
4. Летательный аппарат по п. 1, отличающийся тем, что сегмент периферийного кластера рамы летательного аппарата ограничен по объему элементами фермы, образующими не менее трех граней, при этом по меньшей мере одна грань сегмента выполнена общей с гранью соседнего сегмента.
5. Летательный аппарат по п. 1, отличающийся тем, что сегменты рамы с мотоустановками размещены линейно и симметрично относительно друг друга по меньшей мере в одной горизонтальной плоскости.
6. Летательный аппарат по п. 1, отличающийся тем, что сегменты рамы с мотоустановками размещены в шахматном порядке со смещением относительно друг друга по меньшей мере в одной горизонтальной плоскости.
7. Летательный аппарат по п. 1, отличающийся тем, что каждая мотоустановка содержит по меньшей мере один электрический двигатель, при этом питание электрического двигателя осуществлено по меньшей мере от одного источника электрического питания, размещенного непосредственно на мотоустановке и расположенного в потоке воздуха пропеллера двигателя мотоустановки.
8. Летательный аппарат по п. 1, отличающийся тем, что мотоустановка содержит по меньшей мере два электрических двигателя, размещенных соосно.
9. Летательный аппарат по п. 1, отличающийся тем, что летательный аппарат выполнен с возможностью аварийного переключения источников питания на питание других мотоустановок по кабелю системой коммутаторов.
10. Летательный аппарат по п. 7, отличающийся тем, что источник электрического питания выполнен в виде топливных ячеек, радиоизотопных и ядерных источников электрического питания.
11. Летательный аппарат по п. 1, отличающийся тем, что каждая мотоустановка с электрическим двигателем является самостоятельной единицей с собственным источником питания и контрольно-измерительной аппаратурой, получающей команды от центрального блока управления.
12. Летательный аппарат по п. 1, отличающийся тем, что каждая мотоустановка содержит пневматический двигатель, при этом питание каждого пневматического двигателя каждой мотоустановки осуществлено от установленного в центральной части рамы летательного аппарата компрессора через отдельный трубопровод с системой клапанов с электроприводом, регулирующих подачу сжатого газа на пневмодвигатели и их тягу, получая команды от центрального блока управления летательного аппарата.
13. Летательный аппарат по п. 1, отличающийся тем, что трубопроводы проложены внутри или снаружи элементов рамы.
14. Летательный аппарат по п. 1, отличающийся тем, что компрессор дополнительно содержит пневмоаккумулятор.
15. Летательный аппарат по п. 1, отличающийся тем, что каждая пневматическая мотоустановка является самостоятельной единицей с собственным каналом передачи пневматической энергии от центрального компрессора и контрольно-измерительной аппаратурой, получающая команды от центрального блока управления.
16. Летательный аппарат по п. 12, отличающийся тем, что дополнительно содержит дублирующий компрессор и дублирующие трубопроводы с независимыми клапанами, при этом дублирующий компрессор устанавливается внутри центральной части рамы летательного аппарата совместно с основным.
17. Летательный аппарат по п. 1, отличающийся тем, что на центральной части рамы выполнено посадочное место пилота, установлены органы управления системы управления, органов ручного и ножного управления, блок рулевого управления, компрессора и его систем.
18. Летательный аппарат по п. 1, отличающийся тем, что штатные органы управления выполнены с возможностью демонтажа в сборе быстросъемным соединителем и использования их в качестве пульта дистанционного управления для дистанционного управления аппаратом в беспилотном режиме.
19. Летательный аппарат по п. 1, отличающийся тем, что каждая мотоустановка управляется индивидуально, при этом каждый периферийный кластер выполнен с равным числом мотоустановок, пропеллеры которых вращаются по часовой стрелке, и мотоустановок, пропеллеры которых вращаются против часовой стрелки.
20. Летательный аппарат по п. 1, отличающийся тем, что каждая мотоустановка управляется индивидуально, при этом каждый периферийный кластер выполнен с мотоустановками, содержащими четное число пропеллеров противоположного вращения.
21. Летательный аппарат по п. 1, отличающийся тем, что содержит систему удержания заданной высоты, курса, маршрута, положения в пространстве.
22. Летательный аппарат по п. 1, отличающийся тем, что содержит систему автоматического управления, работающую в пилотируемом, автономном беспилотном и дистанционно управляемом режимах.
23. Летательный аппарат по п. 1, отличающийся тем, что в центре масс расположено подвесное устройство для подъема и транспортировки грузов на внешнем подвесе.
24. Летательный аппарат по п. 1, отличающийся тем, что периферийные кластеры выполнены с возможностью размещения блоков сканирования переднего и заднего пространства, вспомогательных устройств, освещения.
| WO 2004065208 A2, 05.08.2004 | |||
| US 20130311008 A1, 21.11.2013 | |||
| RU 2001836 C1, 30.10.1993 | |||
| US 2014097290 A1, 10.04.2014. |

