Изобретение относится к области авиации, а именно к летательным аппаратам (ЛА) вертикального взлета и посадки - мультикоптерам с увеличенной мобильностью и компактностью.
Из уровня техники известно множество летательных аппаратов (ЛА), которые включают от двух до нескольких десятков электродвижителей в виде электромоторов с пропеллерами (винтами) (см., например, заявки и патенты на изобретения и полезные модели: DE 102013108206, US 2015012154, KR 20180102781, CN 208233360, US 2016114887, RU 147731, RU 2547950, RU 2577822).
Недостатками известных ЛА являются:
- большие массогабаритные размеры ЛА и низкая безопасность полета за счет наличия открытых вращающихся лопастей сравнительно большого размера;
- невозможность обеспечения должного уровня тяги при использовании открытых лопастей (пропеллеров) малого диаметра.
Из уровня техники известны летательные аппараты, которые включают электродвигатели (моторы) с пропеллерами (винтами) с защитой (см. патенты RU 127039 и RU 163412 на полезные модели).
Недостатками известных ЛА являются:
- большие массогабаритные размеры ЛА за счет наличия лопастей и защитных экранов сравнительно большого размера;
- невозможность обеспечения должного уровня тяги при сравнительно малом диаметре лопастей;
- сложность конструкции (используются пары электродвигателей с пропеллерами, помещаемые в защитный корпус-кольцо).
Техническими результатами заявленного изобретения являются:
- увеличение компактности и мобильности летательного аппарата - мультикоптера;
- увеличение безопасности полета летательного аппарата - мультикоптера;
- увеличение эффективности работы движителей на больших скоростях (увеличение тяги).
Технические результаты достигаются тем, что мультикоптер вертикального взлета и посадки с импеллерными движителями включает:
- N - независимо работающие электродвигатели несущих импеллеров в горизонтальной плоскости, установленные равными блоками на левом и правом борту летательного аппарата по направлению движения, противоположно и симметрично относительно друг друга и продольной оси летательного аппарата;
- К - электронные регуляторы хода (ESC);
- М - аккумуляторные батареи (АКБ);
- бортовой летный компьютер с пропорционально-интегрально-дифференцирующим регулятором (PID-регулятором);
где:
N=К - целое положительное четное число, ≥2;
М - целое число, ≥1;
при этом:
- N - независимо работающие электродвигатели несущих импеллеров взаимосвязаны с К - электронными регуляторами хода (ESC);
- К - электронные регуляторы хода (ESC) взаимосвязаны с бортовым летным компьютером;
- для каждого несущего импеллера используется индивидуальный независимо работающий электродвигатель;
при этом бортовой летный компьютер выполнен с возможностью:
- управления электродвигателями несущих импеллеров через электронные регуляторы хода ESC;
- расчета по поступившему сигналу управления от пилота или от системы стабилизации необходимой тяги индивидуально для каждого независимо работающего электродвигателя несущего импеллера;
- выдачи управляющих сигналов на равномерное перераспределение или увеличение, в случае необходимости, тяги к электродвигателям несущих импеллеров;
- автоматического контроля за тягой путем подачи управляющих сигналов электродвигателям несущих импеллеров, используя данные датчиков, например, акселерометра, барометра, гироскопа, компаса и gps;
- управления скоростями вращения каждого отдельного независимого несущего импеллера;
- контроля соответствия заданному режиму работы;
- обеспечения синхронной работы электродвигателей несущих импеллеров.
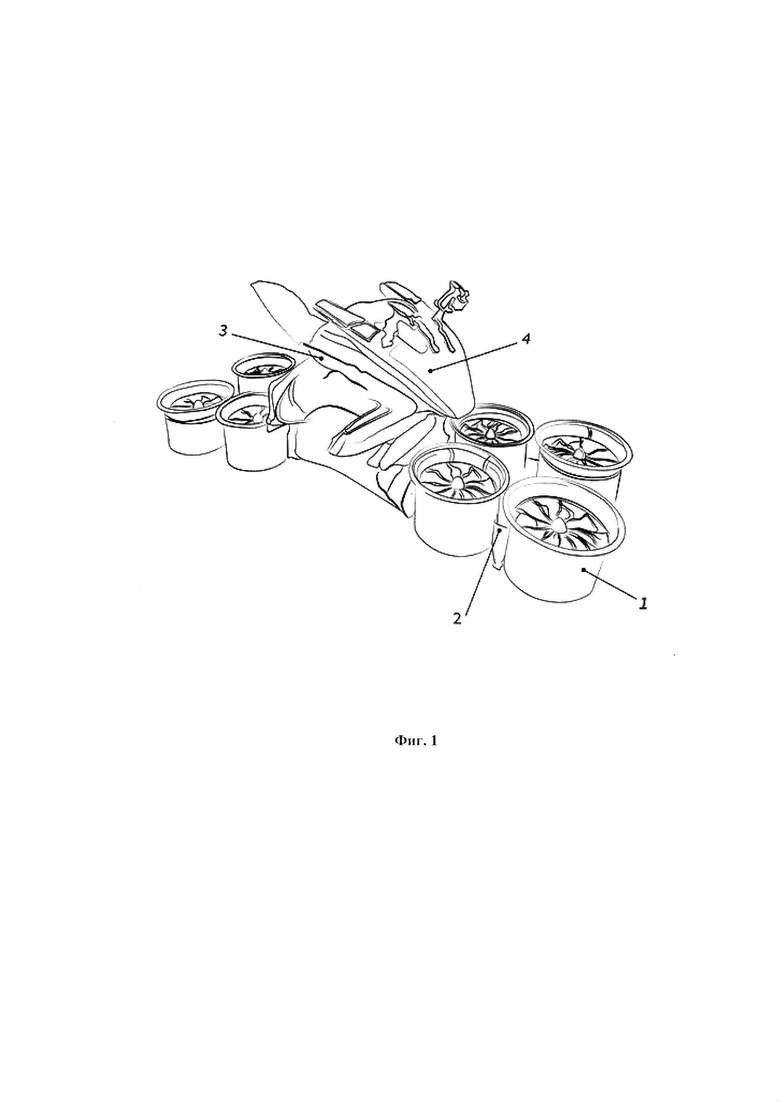
Признаки и сущность заявленного изобретения поясняются в последующем детальном описании, иллюстрируемом чертежом (см. фиг. 1), где показан пример реализации ЛА - мультикоптера вертикального взлета и посадки с импеллерными движителями в виде летающего мотоцикла.
На фигуре 1 обозначено следующее:
1 - N - несущих импеллеров (в примере N=8);
2 - N - электронных регуляторов хода - ESC (в примере N=8, расположение перед каждым из N импеллеров);
3 - М - аккумуляторных батарей (АКБ);
4 - бортовой летный компьютер.
Заявленный ЛА (см. фиг. 1) содержит от 2-х до N (где N - целое положительное четное число) электродвигателей с импеллерами (1), кабину пилота (либо сидение, либо его отсутствие в случае БПЛА) и аккумуляторную батарею (3). Питание всех устройств и элементов ЛА осуществляется от одной или нескольких аккумуляторных батарей (3). Вместо АКБ (3) может использоваться генератор. Вентилятор внутри импеллера (1) ("Рабочее колесо") неподвижно закреплено на оси электродвигателя. Каждому импеллеру (1) присвоен индивидуальный электрический двигатель. Возможно использование преобразователя энергии в виде ДВС с генератором и по меньшей мере одного накопителя энергии в виде батареи или суперконденсатора.
Бортовой летный компьютер (4) выполнен с возможностью:
- управления электродвигателями несущих импеллеров (1) через ESC (2);
- по поступившему сигналу управления (от пилота, либо от системы стабилизации, заложенной в алгоритм), бортовой летный компьютер (4), по заданной программе рассчитывает необходимую тягу индивидуально для каждого независимо работающего электродвигателя несущего импеллера (1), выдает команду (сигнал) управления на равномерное перераспределение и увеличение, в случае необходимости, тяги к электродвигателям несущих импеллеров (1), увеличивая при этом скорость их работы;
- автоматического контроля за тягой путем подачи управляющих сигналов (команд) электродвигателям несущих импеллеров (1), используя данные от любых подключаемых датчиков (например, акселерометра, барометра, гироскопа, компаса, gps и др.);
- управления скоростями вращения каждого отдельного независимого несущего импеллера (1);
- контроля соответствия заданному режиму работы;
- обеспечения синхронной работы электродвигателей несущих импеллеров (1).
В программу бортового летного компьютера (4) заложен пропорционально-интегрально-дифференцирующий регулятор (ПИД-регулятор), алгоритм с обратной связью, для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса.
Электронный регулятор хода (ESC) (2) предназначен для управления оборотами электродвигателя, позволяет плавно варьировать электрическую мощность, подаваемую на электродвигатель.
Бортовой летный компьютер (4) в соответствии сигналам от пилота или заданной программе полета, рассчитывает данные о необходимой тяге и необходимой электроэнергии для каждого из N импеллеров (1), и отправляет управляющий сигнал на ESC (2), который обрабатывает этот запрос, и в соответствии с этим запросом распределяет выделенную мощность на электродвигатели несущих импеллеров (1).
Этот этап проходит следующим образом: сначала отправляются данные на электронные регуляторы хода (ESC) (2) (электродвигатель полностью компенсирует разницу предыдущего состояния и нового). Сразу после этого отправляются данные на алгоритм пропорционально-интегрально-дифференцирующего регулятора (PID-регулятора), который заложен в ПО бортового летного компьютера (4). В результате меняется ток двигателя, электронный регулятор хода (ESC) (2) это определяет и отправляет данные о токе, оборотах, а также о других параметрах винтомоторной группы на бортовой летный компьютер (4), который проверяет соответствие с запрашиваемыми параметрами (если достигли - ничего не предпринимаем, если не достигли повторяем процедуру).
Возможность маневрирования по рысканию, как и тангажу и крену, с точки зрения распределения энергии на движители полетным компьютером, остается для данного изобретения неизменной. Т.к. крутящий момент присутствует как у открытого пропеллера, так и у импеллера, то разница моментов может быть нивелирована программно.
Использование импеллеров (1) позволяет обеспечить требуемый уровень тяги по сравнению с использованием открытых пропеллеров малых диаметров. При аналогичных диаметрах, тяга открытого пропеллера будет меньше, чем у импеллера (1) за счет отсутствия концентрирующего воздушный поток канала, меньшего количествава лопастей и индуктивных потерь.
В заявленном ЛА не требуется дополнительная защита пропеллеров, т.к. вместо пропеллеров используются "рабочие колеса" с лопатками, скрытые в цилиндрическом воздушном канале импеллера (см. фиг. 1, поз. 1).
Также, в заявленном изобретении не требуется специальное помещение пропеллеров с электродвигателями и их пар в защитный корпус - кольцо.
Одним из преимуществ заявленного ЛА является то, что основным параметром является тяга винтомоторной группы, которая устанавливается сразу же после получения данных от пилота или бортового летного компьютера с заданной программой полета, что показывает отличные динамические характеристики.
Увеличение компактности и мобильности летательного аппарата достигаются благодаря использованию импеллеров - "рабочих колес" с лопатками, скрытых в цилиндрическом воздушном канале импеллера малого размера.
Увеличение безопасности полета мультикоптера достигается за счет отсутствия открытых вращающихся лопастей и наличия пропорционально-интегрально-дифференциального алгоритма стабилизации полета (ПИД-регулятора).
Увеличение эффективности работы движителей на больших скоростях (увеличения тяги) достигается за счет аэродинамических свойств используемых импеллеров.
Заявленный мультикоптер, в частных вариантах выполнения, может быть выполнен беспилотным, либо может содержать кабину пилота или сидение».
Проведенный анализ уровня техники позволил установить: аналоги с совокупностью существенных признаков, тождественных и идентичных существенным признакам заявленного мультикоптера отсутствуют, что указывает на соответствие заявленной мультикоптера условию патентоспособности «новизна».
Результаты поиска известных решений с целью выявления существенных признаков, совпадающих с отличительными от аналогов существенными признаками заявленного мультикоптера, показали, что они не следуют явным образом из уровня техники, а также не установлена известность влияния отличительных существенных признаков на указанные автором технические результаты. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Несмотря на то, что заявленное изобретение показано и описано со ссылкой на его определенные предпочтительные варианты осуществления, специалистам в данной области техники будет понятно, что различные изменения по форме и содержанию могут быть сделаны в нем без отклонения от сущности и объема изобретения, которые определены прилагаемой формулой изобретения с учетом описания и чертежа.
Изобретение относится к области авиации, а именно к летательным аппаратам (ЛА) вертикального взлета и посадки - мультикоптерам с увеличенной мобильностью и компактностью. Мультикоптер вертикального взлета и посадки с импеллерными движителями включает независимо работающие электродвигатели несущих импеллеров, электронные регуляторы хода (ESC), аккумуляторные батареи (АКБ) и бортовой летный компьютер с пропорционально-интегрально-дифференцирующим регулятором (PID - регулятором). Обеспечивается компактность и мобильность, повышение безопасности летательного аппарата, повышение эффективности работы движителей. 1 з.п. ф-лы, 1 ил.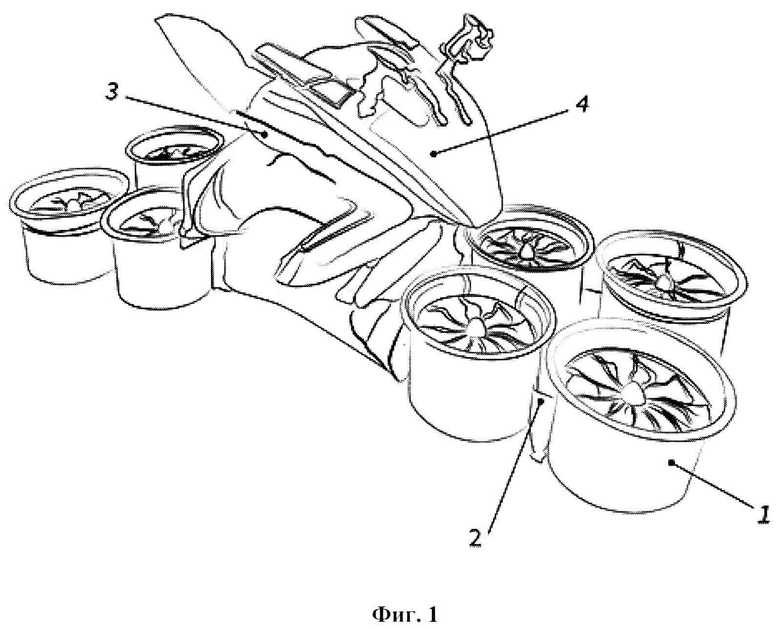
1. Мультикоптер вертикального взлета и посадки с импеллерными движителями, включающий:
- N - независимо работающие электродвигатели несущих импеллеров в горизонтальной плоскости, установленные равными блоками на левом и правом борту летательного аппарата по направлению движения противоположно и симметрично относительно друг друга и продольной оси летательного аппарата;
- К - электронные регуляторы хода (ESC);
- М - аккумуляторные батареи (АКБ);
- бортовой летный компьютер с пропорционально-интегрально-дифференцирующим регулятором (PID - регулятором);
где:
N=К - целое положительное четное число, ≥2;
М - целое число, ≥1;
при этом:
- N - независимо работающие электродвигатели несущих импеллеров взаимосвязаны с К - электронными регуляторами хода (ESC);
- К - электронные регуляторы хода (ESC) взаимосвязаны с бортовым летным компьютером;
- для каждого несущего импеллера используется индивидуальный независимо работающий электродвигатель;
при этом бортовой летный компьютер выполнен с возможностью:
- управления электродвигателями несущих импеллеров через электронные регуляторы хода ESC;
- расчета по поступившему сигналу управления от пилота или от системы стабилизации необходимой тяги индивидуально для каждого независимо работающего электродвигателя несущего импеллера;
- выдачи управляющих сигналов на равномерное перераспределение или увеличение, в случае необходимости, тяги к электродвигателям несущих импеллеров;
- автоматического контроля за тягой путем подачи управляющих сигналов электродвигателям несущих импеллеров, используя данные датчиков, например, акселерометра, барометра, гироскопа, компаса и gps;
- управления скоростями вращения каждого отдельного независимого несущего импеллера;
- контроля соответствия заданному режиму работы;
- обеспечения синхронной работы электродвигателей несущих импеллеров.
2. Мультикоптер по п. 1, отличающийся тем, что выполнен беспилотным, либо содержит кабину пилота или сидение.
| СИСТЕМА ДЛЯ УВЕЛИЧЕНИЯ ПРОДОЛЖИТЕЛЬНОСТИ И ДАЛЬНОСТИ ПОЛЕТА МУЛЬТИКОПТЕРА | 2017 |
|
RU2657666C1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Способ выплавки металлов | 1959 |
|
SU127039A1 |
| Д.А.Журман и др | |||
| "Настройка ПИД регулятора для БПЛА на базе микроконтроллера семейства ARDUINO", найдено онлайн в интернете: http://earchive.tpu.ru/bitstream/11683/52541/1/conference_tpu-2018 C04_p267-268.pdf | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Установка барабанного типа для разделения зерновой смеси | 1960 |
|
SU134515A1 |

