Область техники, к которой относится изобретение
Заявленное изобретение относится к области авиастроения, а именно к летательным аппаратам вертикального взлета и посадки тяжелее воздуха, к транспортной технике. Изобретение относится к винтокрылым летательным аппаратам за счет конструктивных особенностей винтов и их большого размера.
Летательный аппарат вертикального взлета и посадки может использоваться как персональное средство передвижения.
Уровень техники
Из уровня техники известны различные летательные аппараты, включающие в себя свойства самолета, вертолета, дельтаплана, планера и т.д.
1. Аналогом заявленного изобретения можно считать Аэробайк патент RU №127039.
Конструкция полезной модели состоит из планера, силовой установки с винтами вертикального взлета и посадки, механизма управления полетом.
Аэробайк выполнен аналогично квадрокоптеру, включающему электродвигатели привода винтов, которые одновременно являются тяговыми винтами и винтами управления
Недостатком такого решения можно считать то, что качество управления таким летательным аппаратом представляется недостаточным за счет сложности синхронизации работы одновременно четырех двигателей, соединяющих в себе функции маршевых и рулевых двигателей, а так же достаточно сложной возможности вывода устройства из аварийного режима при отказе части двигателей. Кроме того, тяговые винты летательного аппарата оснащены рулевыми пластинами, что еще больше усложняет механизм управления аэробайком, что не лучшим образом влияет на его надежность (Аэробайк патент RU №127039 https://fips.ru).
2. Известен летательный аппарат вертикального взлета и посадки патент RU №2603302 С1 МПК В64С 29/00 (2006.01) В64С 27/08 (2006, 01).
Представленное решение так же относится к авиастроению, а именно летательным аппаратам вертикального взлета и посадки.
Конструкция состоит из несущей рамы пространственной конструкции, системы управления, системы дистанционного управления, сидения, мотоустановки.
Несущая рама выполнена таким образом, что на ней расположена центральная часть и два периферийных кластера. Периферийные кластеры выполнены из однотипных, соединенных между собой сегментов, имеющих ферменную конструкцию. Количество сегментов у кластера более трех, внутри каждого из них находится мотоустановка с двигателем и пропеллером, который имеет горизонтальное вращение. Изобретение имеет стандартное управление (летательный аппарат вертикального взлета и посадки патент RU №2603302 С1 МПК В64С 29/00 (2006.01) В64С 27/08 (2006.01) https://fips.ru).
3. Известен конвертоплан с реактивным приводом роторов WO 2015094020 А2.
Изобретение управляется роторами посредством автоматов перекоса через рычаги управления. Данное изобретение имеет подъемные роторы (несущие винты), служащие для вертикального взлета и посадки.
Управление конвертопланом осуществляется с помощью роторов через автомат перекоса вертолетного типа без использования иных устройств (руля, элерона и других механизмов) (WO 2015094020 А2 https://worldwide.espacenet.com).
4. Известно персональное полетное устройство ЕА 200701893 (А1) - 2008-04-28.
Изобретение относится к индивидуальным летательным аппаратам вертикального взлета и посадки.
Персональное полетное устройство может прикрепляться к пилоту как индивидуальный ранцевый реактивный летательный аппарат.
Изобретение дает возможность пилоту осуществлять полет с включенной силовой установкой.
Персональное полетное устройство состоит из корпуса, который крепится к пилоту, двух вентиляторов с противоположных сторон корпуса (ЕА 200701893 (А1), https://worldwide. espacenet.com).
5. Из уровня техники известен так же аэромобиль WO 2016/022040 А1.
Конструкция изобретения состоит из планера, силовой установки с винтами вертикального взлета и посадки, средства управления полетом.
Управление полетом аэромобиля при его использовании осуществляется с помощью винтов с приводом от электрических двигателей и маршевыми винтами с приводом от двигателя внутреннего сгорания (Аэромобиль WO 2016/022040 А1 https://worldwide.espacenet.com).
Все указанные аналоги имеют ряд недостатков:
1 - Летательные аппараты имеют низкую скорость и маневренность при посадке и взлете;
2 - Известные летательные аппараты для осуществления взлета и посадки требуют наличия специально оборудованных аэродромов, для осуществления взлета и посадки необходимо применение специальных технических средств и труда обслуживающего персонала;
3 - Для осуществления парковки и стоянки летательных аппаратов требуются специально оборудованные помещения, ангары и стоянки;
4 - При использовании известных летательных аппаратов существуют проблемы его адаптации к условиям города;
5 - Неустойчивость динамики полета летательного аппарата, особенно в момент перехода из вертикального взлета (посадки) в горизонтальный режим полета;
6 - При использовании механизма крыла для маневрирования снижаются аэродинамические свойства летательных аппаратов ввиду увеличения лобового сопротивления, вследствие чего понижается эффективность использования данных летательных аппаратов;
7 - При переходе из режима взлета (посадки) в режим горизонтального полета необходимо использование дополнительных приводов и поворотных механизмов, осуществляющих разворот силовых установок, которые увеличивают размер и вес летательных аппаратов, кроме того снижают его надежность и усложняют конструкцию.
Раскрытие изобретения.
На сегодняшний день необходимость создания сверхлегких летательных аппаратов вертикального взлета и посадки не вызывает сомнений. Такие устройства можно успешно применять не только в различных местностях (лес, горы, поле), природных условиях, но и в условиях городской застройки.
Задачами заявленного решения является разработка летательного аппарата вертикального взлета и посадки с улучшенными летными качествами и улучшенным элементом управления полетом, конструкция которого при этом была бы проста и надежна в использовании.
Поставленные задачи достигаются за счет разработанной конструкции летательного аппарата вертикального взлета и посадки, который устраняет недостатки вышеописанных летательных устройств, созданных ранее.
Заявленное изобретение, реализуя свойства представленных аппаратов, решает ряд проблем:
1. Летательный аппарат обеспечивает пользователя персональным летательным транспортным средством, адаптируемым к различным природным, климатическим условиям, к условиям города;
2. Заявленный летательный аппарат позволяет осуществлять парковку на неподготовленных для этого площадках и аэродромах, в лесу, в горах, поле и другой местности, позволяет осуществлять парковку в условиях городской застройки (автопарковки, стоянки, крыши домов) без специализированных технических средств и без использования труда обслуживающего персонала;
3. Устройство удобно и просто в эксплуатации, позволяет пилоту осуществлять маневры в
воздухе, а также вертикальный взлет и посадку.
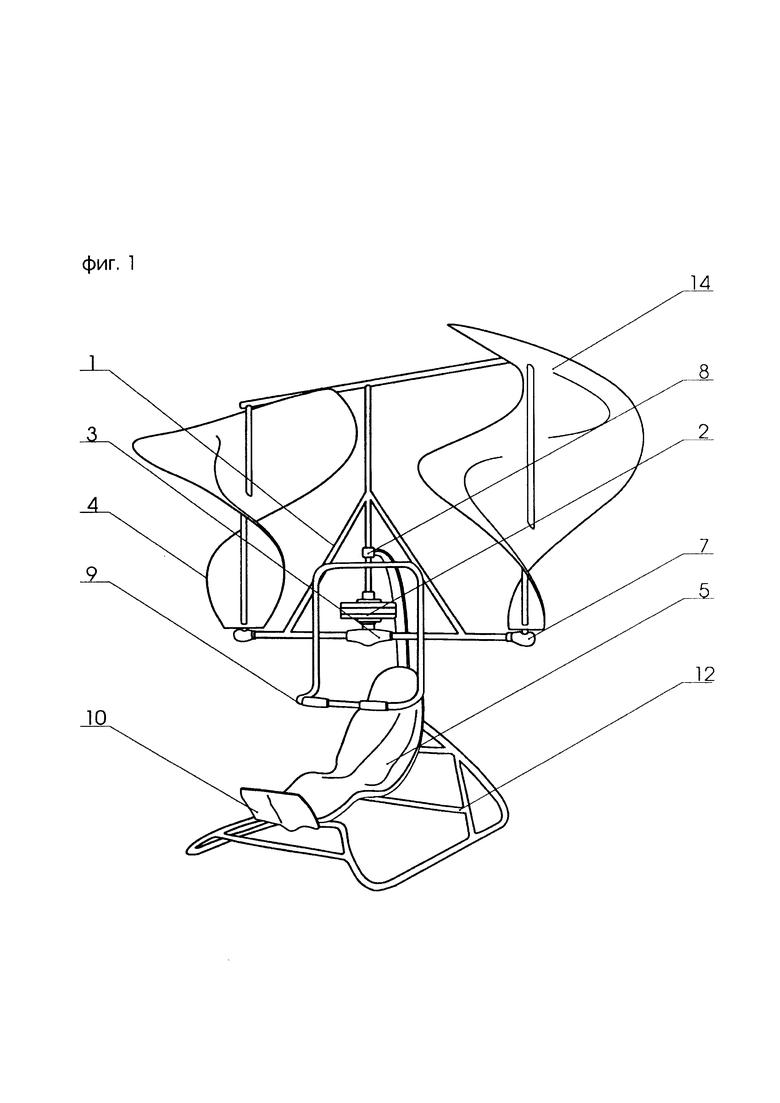
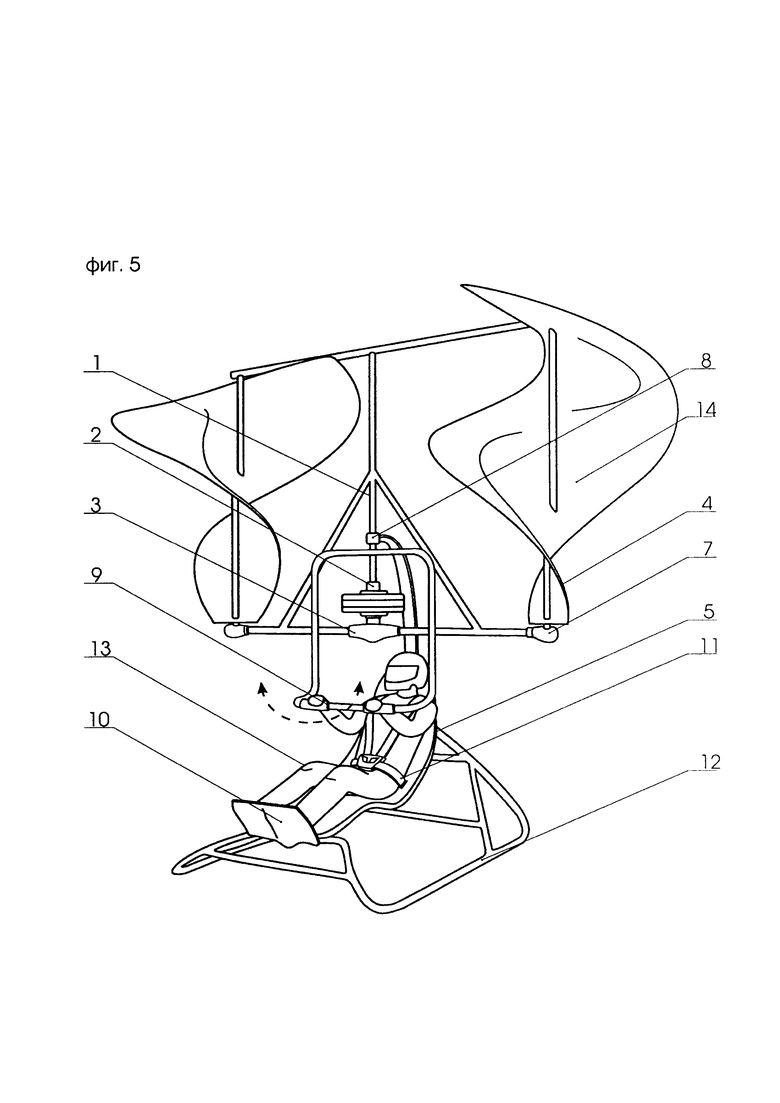
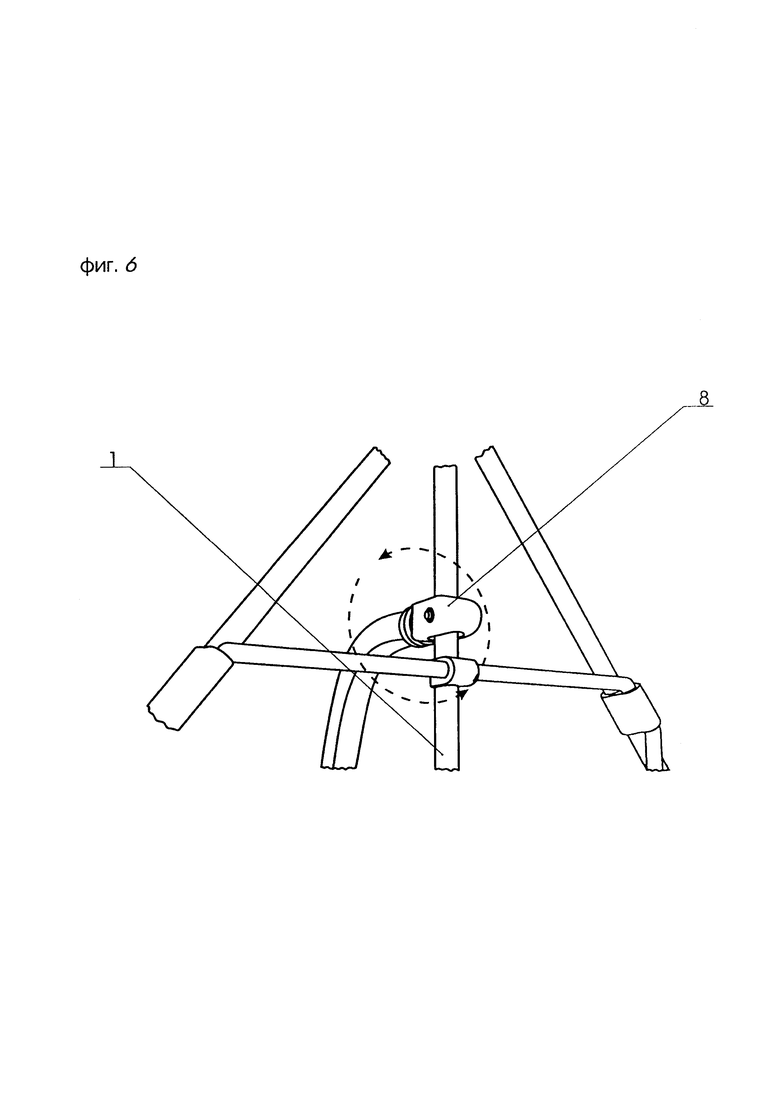
Летательный аппарат вертикального взлета и посадки (фигЛ-5) включает раму (1) с электромотором (2), редуктор (3), два закрепленных вертикально глубоких винта с переменным шагом (4), сиденье (5) для размещения в нем пилота (13), управляющего летательным аппаратом, угловые редукторы (7), ручку (9), жестко закрепленную на раме (1). К опорной раме (12) с помощью шарнирного соединения (8) фиг. 6 крепится рама (1) с винтами (4).
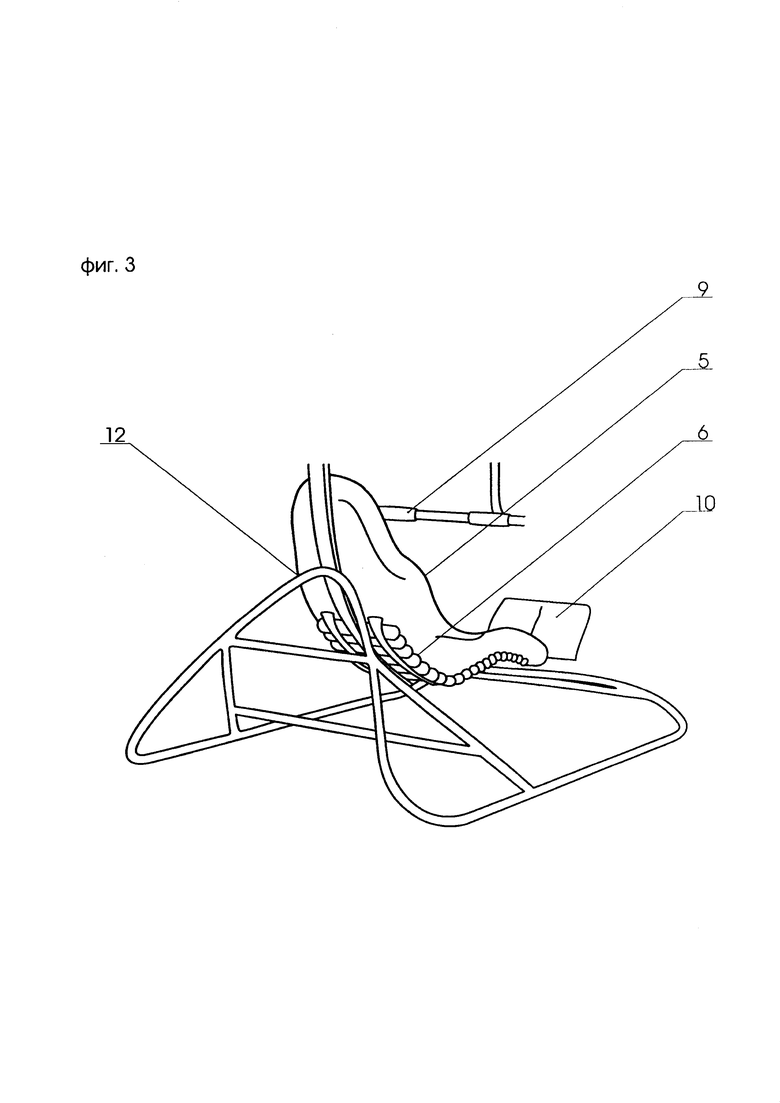
На опорной раме (12) под сиденьем (5) пилота располагаются аккумуляторные батареи (6). Электромотор (2) расположен на вертикальном элементе рамы (1) над сиденьем (5) пилота.
В частном случае исполнения, когда в качестве основной движущей силы для вращения винтов (4) в аппарате используется двигатель внутреннего сгорания, он располагается на раме (12).
По бокам заявленного летательного аппарата установлены вертикальные винты (4) с переменным шагом и разным направлением вращения, по размеру составляющие приблизительно одну вторую всей конструкции летательного аппарата фиг. 1.
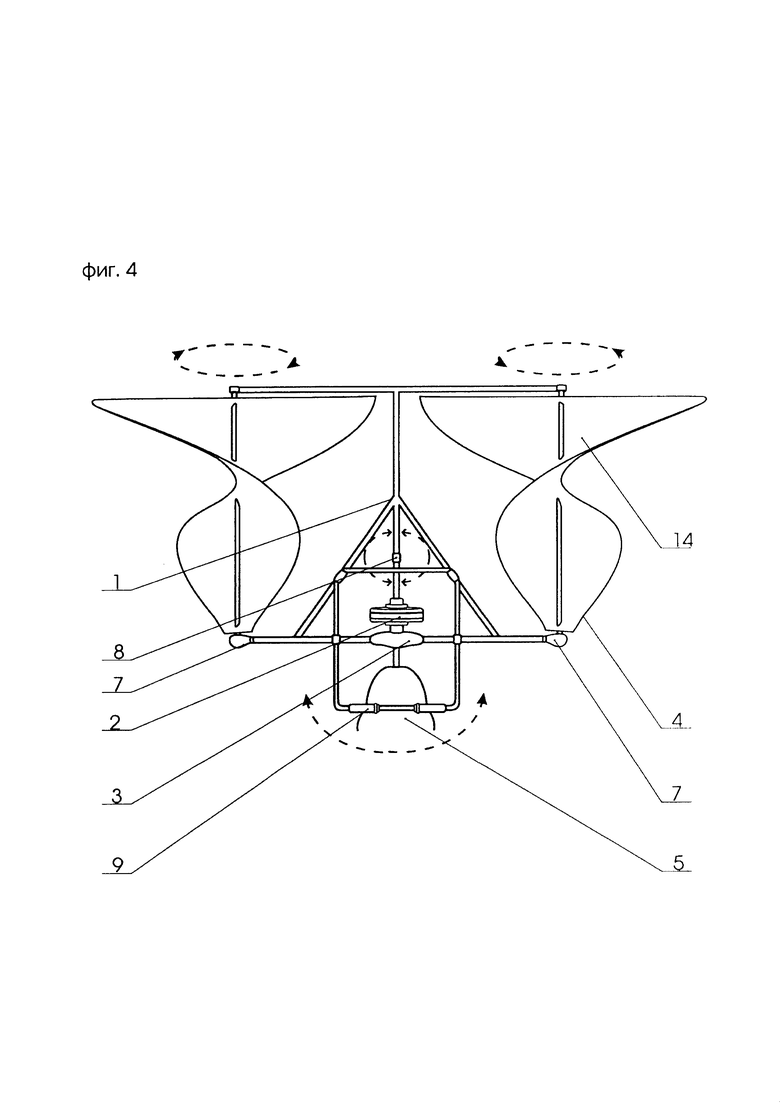
Винты (4) фиг. 4 заявленного летательного аппарата имеют форму геликоида1 (1 Геликоид - винтовая поверхность, описываемая прямой, которая вращается с постоянной угловой скоростью вокруг неподвижной оси, пересекает ось движения под постоянным углом и одновременно перемещается поступательно с постоянной скоростью вдоль этой оси. Математическая энциклопедия.- М.: Советская энциклопедия И.М. Виноградов 1977-1985.)и расположены ортогонально нижней части рамы (1) фиг. 4.
Преимуществом заявленного летательного аппарата является ортогональное расположение оси винтов фиг. 4, которое делает летательный аппарат более устойчивым к турбулентности, чем существующие аналоги. Лопасти (14) фиг. 4 несущих винтов (4) обтекаются потоком воздуха, возникающим в результате вращательного движения фиг,4.
Летательный аппарат поднимается в воздух за счет конструкции воздушного винта (4) - главной детали, отличающей заявленный аппарат от существующих аналогов. Вертикальный подъем осуществляется при раскручивании винтов (4), которые вращаются одновременно в разных направлениях фиг. 4, каждый вокруг своей фиксированной оси.
При вращении винта (4) захватываемый лопастями воздух закручивается и ускоряется, создавая подъемную силу и тягу, которые приводят летательный аппарат в движение.
Заявленный летательный аппарат создает такие условия, при которых потоки воздуха, находящиеся в области вращения винтов под заданным вращательным направлением, искусственно образуют воронку, по принципу своего действия аналогичную торнадо, таким образом, летательному аппарату задается движущая сила. Благодаря центробежной силе воздух, проходя через лопасти (14), закручивается, образуя воронку вокруг каждого винта (4). Воздух, таким образом, одновременно вращается вокруг двух осей вращения, создавая подъемную силу для летательного аппарата.
Управление движением осуществляется за счет наклона рамы (1) с винтами (4) при помощи шарнирного соединения (8) фиг. 6 рамы (1) фиг. 4. Перемещая ручку (9) фиг. 5 влево, вправо, к себе и от себя, пилот (13) меняет направление движения летательного аппарата.
Заявленный летательный аппарат приспособлен к изменениям скорости и направления ветровых потоков за счет того, что задает направление движения ветровым потокам с помощью конструкции летательного аппарата и формы винтов, а также способен преобразовывать силу ветра для подъема за счет придания ему направления вращения, образуемая воронка создает подъемную силу.
Винты (4) работают как подъемные при взлете и посадке (вертикальном полете) и как тянущие (толкающие) при горизонтальном полете, кроме того поворот рамы (1) с винтами (4) регулирует направление полета (фиг. 5). Центр тяги винтов (4) расположен параллельно с двух боковых сторон летательного аппарата.
В качестве основной движущей силы для вращения винтов (4) в аппарате используется электромотор (2) и/или двигатель внутреннего сгорания.
Возможен частный случай исполнения заявленного решения, имеющего и двигатель внутреннего сгорания и электромотор (2), которые осуществляют вращение винтов совместно, при этом двигатель внутреннего сгорания располагается на раме (12), а электромотор устанавливается на раме 1.
Такая конструкция летательного аппарата позволяет увеличить уровень безопасности использования изобретения за счет повышения устойчивости полета.
Краткое описание чертежей:
Фиг. 1 - схематичное изображение летательного аппарата вертикального взлета и посадки. Общий вид.
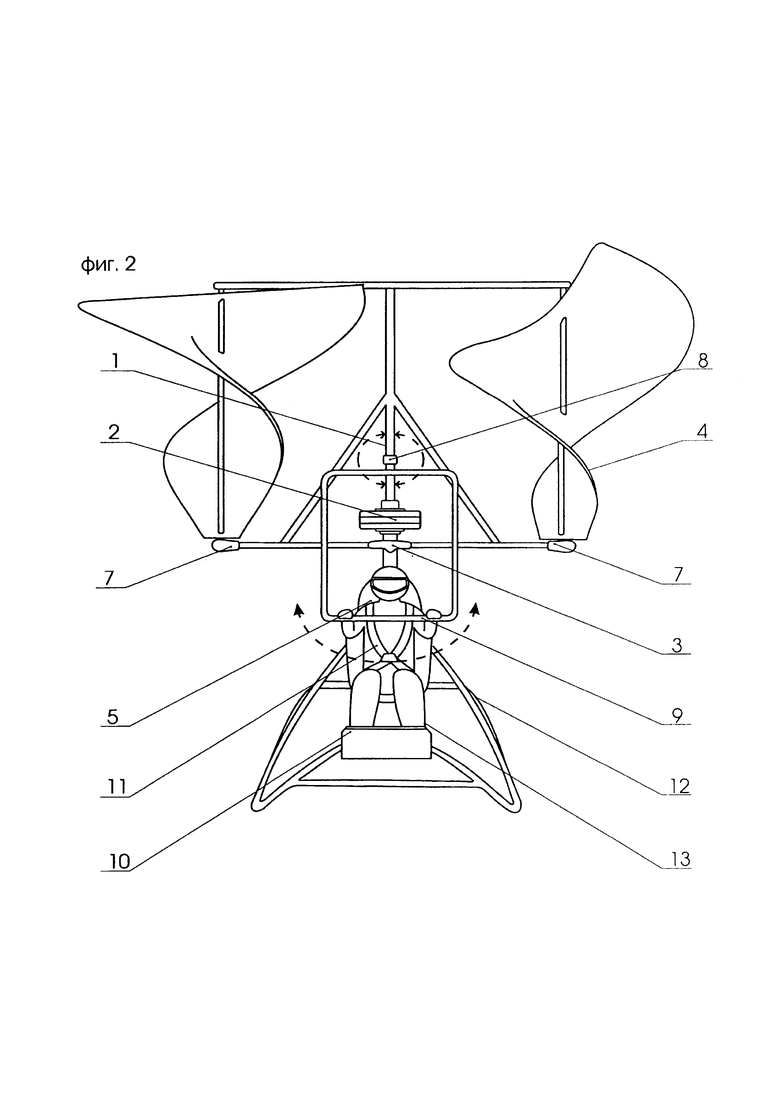
Фиг. 2 - схематичное изображение летательного аппарата вертикального взлета и посадки. Вид спереди.
Фиг. 3 - схематичное изображение сидения летательного аппарата вертикального взлета и посадки. Вид сзади.
Фиг. 4 - схематичное изображение верхней части летательного аппарата вертикального взлета и посадки. Вид спереди.
Фиг. 5 - схематичное изображение летательного аппарата вертикального взлета и посадки с пилотом. Общий вид.
Фиг. 6 - схематичное изображение шарнирного соединения. Общий вид.
Краткое описание конструктивных элементов:
1. Рама;
2. Электромотор;
3. Редуктор;
4. Винт;
5. Сиденье пилота;
6. Аккумуляторные батареи;
7. Угловые редукторы;
8. Шарнирное соединение подвесной рамы;
9. Ручка;
10. Подставка для ног;
11. Ремень безопасности;
12. Опорная рама;
13. Пилот;
14. Лопасть.
Принцип работы
Заявленный летательный аппарат вертикального взлета и посадки (фиг. 1-5) достаточно прост и безопасен в использовании.
Летательный аппарат вертикального взлета и посадки при использовании предполагает осуществление следующего порядка действий.
Пилот (13), пристегнутый к креслу ремнями безопасности (11), подает напряжение на электродвигатель (2), который вращает вины (4), и создаваемая подъемная сила отрывает аппарат от земли.
Управление летательным аппаратом осуществляется перемещением ручки (9), закрепленной на раме (1) через шарнирное соединение с рамой (12).
Перемещая ручку влево, вправо к себе и от себя пилот меняет направление движения летательного аппарата (фиг. 5).
Скорость полета регулируется путем изменения числа оборотов вращения винта. Таким образом, с помощью заявленного изобретения достигается технический результат: летательный аппарат имеет упрощенную и облегченную конструкцию, при этом обладает повышенной маневренностью на всех стадиях полета как при вертикальном подъеме (посадке) так и при горизонтальном полете. Кроме того, изобретение обладает улучшенными аэродинамическими свойствами и качествами, повышенной устойчивостью и прочностью, безопасностью в использовании.
Изобретение можно использовать в качестве персонального средства передвижения по воздуху с возможностью взлета и посадки в различных, специально не приспособленных для этого условиях без использования дополнительной техники и обслуживающего персонала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета | 2017 |
|
RU2681464C1 |
| МУСКУЛОЛЕТ (ВАРИАНТЫ) | 2022 |
|
RU2786028C1 |
| РАМА МУЛЬТИКОПТЕРА (ВАРИАНТЫ) | 2017 |
|
RU2657650C1 |
| СПОСОБ АВАРИЙНОЙ ПОСАДКИ КВАДРОКОПТЕРА | 2017 |
|
RU2657659C1 |
| Мультикоптер вертикального взлета и посадки с импеллерными движителями | 2020 |
|
RU2761991C2 |
| СПОСОБ РАЗМЕЩЕНИЯ ВИНТОМОТОРНЫХ ГРУПП НА ЛЕТАТЕЛЬНОМ АППАРАТЕ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ И ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2777677C1 |
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2013 |
|
RU2534112C1 |
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ КОМБИНИРОВАННОГО НАЗНАЧЕНИЯ И ГИБРИДНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ ВИНТОМОТОРНЫХ ГРУПП | 2022 |
|
RU2803214C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| АЭРОЛЕТ (ВАРИАНТЫ), ЧАСТИ АЭРОЛЕТА, СПОСОБЫ ИСПОЛЬЗОВАНИЯ АЭРОЛЕТА И ЕГО ЧАСТЕЙ | 2010 |
|
RU2466061C2 |
Изобретение относится к области авиации, в частности к конструкциям винтокрылых летательных аппаратов. Летательный аппарат вертикального взлета и посадки включает раму с электромотором, редуктор, два закрепленных вертикально винта в форме геликоида с переменным шагом, сиденье для размещения в нем пилота, управляющего летательным аппаратом, угловые редукторы, ручку, жестко закрепленную на раме. К опорной раме с помощью шарнирного соединения крепится рама с винтами. На подвесной раме под сиденьем пилота располагаются аккумуляторные батареи. В качестве основной движущей силы для вращения винтов предусмотрен электромотор. Дополнительно может использоваться двигатель внутреннего сгорания, который может работать как отдельно, так и совместно с электромотором. Обеспечивается повышение устойчивости, прочности, безопасности в использовании. 3 з.п. ф-лы, 6 ил.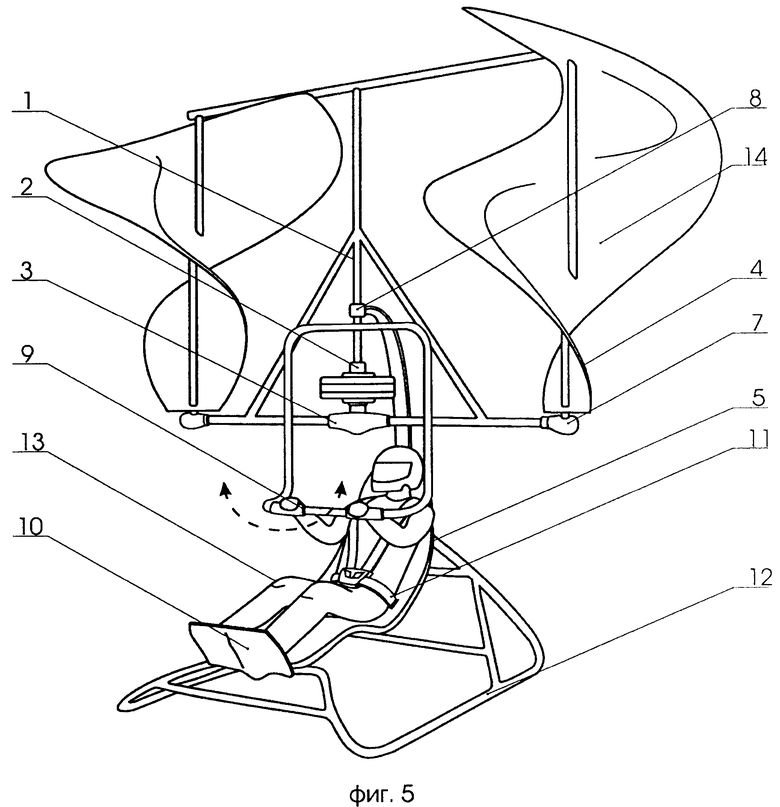
1. Летательный аппарат вертикального взлета и посадки, включающий силовую установку с винтами, установленными на раме, сиденье пилота и ручку управления, отличающийся тем, что винты, выполненные с переменным шагом, имеют геликоидную форму, при этом лопасти винтов расположены ортогонально нижней части рамы, ручка управления жестко закреплена на раме, которая шарнирно соединена с опорной рамой.
2. Летательный аппарат по п. 1, отличающийся тем, что в качестве силовой установки используется электромотор.
3. Летательный аппарат по п. 1, отличающийся тем, что в качестве силовой установки используется двигатель внутреннего сгорания.
4. Летательный аппарат по п. 1, отличающийся тем, что в качестве силовой установки используются совместно электромотор и двигатель внутреннего сгорания.
| ДВИЖИТЕЛЬНАЯ СИСТЕМА ВЫСОКОСКОРОСТНОГО ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2015 |
|
RU2629635C2 |
| Жезловой аппарат | 1928 |
|
SU12396A1 |
| US 9878258 B2, 30.01.2018 | |||
| US 1990573 A1, 2.02.1935 | |||
| НАРОДНЫЙ ВЕРТОЛЕТ 21 ВЕКА КАН 21 (ВАРИАНТЫ) | 2007 |
|
RU2364550C2 |

