Область техники
Изобретение относится к области авиации, а именно к летательным аппаратам (ЛА) вертикального взлета и посадки: мультикоптерам и конвертопланам.
Уровень техники
Из уровня техники известен ЛА вертикального взлета и посадки (см. патент Российской Федерации RU 143505 на полезную модель, Патентообладатель: Арсентьев Д.А., опубл. 27.07.2014).
ЛА включает два двигателя, каждый из которых механически связан с одним из двух несущих винтов. Синхронная работа обоих двигателей обеспечивается блоком управления - бортовым компьютером. Управление по тангажу производится за счет перераспределения тяги между двумя несущими винтами по сигналу от бортового компьютера на соответствующий двигатель, а также на сервоприводы рулей управления, которыми оснащены каналы винтов. Управление по крену регулируется по сигналу от бортового компьютера на сервоприводы рулей управления. Сочетая управление по тангажу и крену, обеспечивают управление по курсу. При продолжительном (более нескольких секунд) отклонении центра тяжести выдается команда на перераспределение тяги между двигателями. Также, двигатели используются для управления ЛА на резком маневре, обеспечив быстрое перераспределение тяги за короткий промежуток времени.
Недостатками известного технического решения являются:
- использование только двух двигателей и двух винтов, что не обеспечивает аварийную посадку при возникновении аварийной (нештатной) ситуации на одном из двигателей (его отказе), система парашютного типа не предотвращает аварию, а лишь смягчает ее последствия, невозможность аварийной посадки с помощью парашюта на малых высотах полета;
- маленькая дальность полета, безопасность и аварийно-устойчивость;
- невозможность вертикального взлета/посадки на стандартное парковочное место 2,5×5 м.
Из уровня техники известен аэромобиль (см. патент Российской Федерации RU 147731 на полезную модель, Патентообладатель: Арсентьев Д.А., опубл. 20.11.2014).
Аэромобиль включает планер, силовую установку с винтами вертикального взлета и посадки, средства управления полетом, винты управления полетом с приводом от электрических двигателей, бортовой компьютер и, по меньшей мере, два маршевых винта. Маршевые двигатели обеспечивают необходимую подъемную силу и стабилизацию по тангажу и крену. Каждый из электрических двигателей винтов управления полетом, подключен к «своему» генератору, передающему электрическую энергию в распределитель питания. Распределитель питания, в свою очередь, передает электрическую энергию прямо на электрические двигатели, которые приводят в движение винты управления полетом, режимы работы которых обеспечивают выравнивание центра тяжести и стабилизацию аэромобиля в воздухе. При отказе одного из двигателей винтов управления полетом, а также одного из двигателей привода маршевых винтов становится возможным аварийное питание электрических двигателей от накопленного заряда из аккумулятора. В течение нештатного режима аппарат сможет безопасно активировать парашютную систему спасения.
Недостатками известного технического решения являются:
- использование системы спасения парашютного типа, которая не предотвращает аварию, а лишь смягчает ее последствия;
- невозможность аварийной посадки с помощью парашюта на малых высотах полета;
- маленькая дальность полета, безопасность и аварийно-устойчивость;
- невозможность вертикального взлета/посадки на стандартное парковочное место 2,5×5 м вследствие больших габаритов.
Из уровня техники известен ЛА вертикального взлета и посадки (см. патент Российской Федерации RU 140653 на полезную модель, Патентообладатель: ООО «ДиалКом», опубл. 20.05.2014).
ЛА вертикального взлета и посадки оборудован системой аварийной посадки, состоящей из блока управления, парашюта, исполнительного механизма отстрела парашюта, аварийного радиомаяка, аварийного светового маяка, аварийного маяка инфракрасного диапазона и ультразвукового зуммера.
Недостатками известного технического решения являются:
- использование системы спасения парашютного типа, которая не предотвращает аварию, а лишь смягчает ее последствия;
- невозможность аварийной посадки с помощью парашюта на малых высотах полета, а также невозможность аварийной посадки при возникновении аварийной (нештатной) ситуации на одном из двух электродвигателей;
- маленькая дальность полета, безопасность и аварийно-устойчивость;
- невозможность вертикального взлета/посадки на стандартное парковочное место 2,5×5 м вследствие больших габаритов.
Из уровня техники известен «летающий мотоцикл» (см. патент Российской Федерации RU 108016 на полезную модель, Патентообладатель: Злобин А.А., опубл. 10.09.2010).
Летающий мотоцикл обладает системой спасения парашютного типа, содержащий крестообразную раму, 4 симметричных пропеллера и двигатель, система управления имеет электронно-цифровой блок, обеспечивающий автоматический контроль за положением аппарата в воздухе по горизонтали и вертикали путем подачи управляющих сигналов моторам, использующий данные от электронных датчиков и вычисляющий скорость вращения для каждого отдельного пропеллера, и компенсирующий внешние воздействия, обеспечивающий передачу исполнительных команд на моторы с управляющих устройств мотоцикла; управляющие устройства располагаются на руле. Снизу к платформе крепятся стояночные опоры; сверху в середине несущей платформы на крепежной площадке устанавливается конструкция для размещения пилота, либо пилота и пассажира, либо пилота и груза, включающая сиденье для пилота, либо пилота и пассажира.
Недостатками известного технического решения являются:
- пропеллеры большого размера и массы не могут быть быстро остановлены при аварии, что усложняет задачу стабилизации аппарата в воздухе, отказ хотя бы одного пропеллера из четырех, а также любых других элементов конструкции, обеспечивающих работу пропеллера, ведет к аварии;
- система спасения парашютного типа не предотвращает аварию, а лишь смягчает ее последствия, невозможность аварийной посадки с помощью парашюта на малых высотах полета;
- большие массогабаритные показатели и невозможность взлета-посадки со стандартного парковочного места 2,5×5 метров;
- маленькая дальность, продолжительность и скорость прямолинейного полета;
- двигатели обладают большой массой и сильным шумом, что исключает использование аппарата в условиях города.
Из уровня техники известен летающий мотоцикл по проекту Aero-X Hoverbike (http://aerofex.com/theaerox/), содержащий двигатель внутреннего сгорания и два пропеллера для обеспечения тяги, а также систему управления на отклоняемых аэродинамических рулях.
Недостатками известного технического решения являются:
- двухпропеллерная схема с применением двигателя внутреннего сгорания является неустойчивой, отказ одного двигателя или любое нарушение в работе пропеллеров ведет к немедленной раскрутке ЛА в воздухе и делает невозможным его спасение;
- пропеллеры большого диаметра и массы усложняют стабилизацию ЛА, пропеллеры не могут быть быстро остановлены при аварии;
- невозможность вертикального взлета/посадки на стандартное парковочное место 2,5×5 м вследствие больших габаритов.
Из уровня техники известен летающий мотоцикл по проекту «МА hoverbike helicopter» (http://www.hover-bike.com/MA/product/hoverbike-helicopter/), обладающий, в разных конфигурациях, двумя или четырьмя пропеллерами.
Недостатками известного технического решения являются:
- отказ двигателя или любое нарушение в работе пропеллеров ведет к немедленной раскрутке ЛА в воздухе и делает невозможным его спасение;
- пропеллеры большого диаметра и массы усложняют стабилизацию аппарата в воздухе, они не могут быть быстро остановлены при аварии;
- невозможность вертикального взлета/посадки на стандартное парковочное место 2,5×5 м вследствие больших габаритов.
Из уровня техники известен ЛА под названием «Moller M200G Volantor» (US) (http://www.moller.com/), содержащий платформу, фюзеляж, восемь роторно-поршневых двигателей Ванкеля, восемь пропеллеров в кольцевом ободе, кабину, сиденье пилота.
Недостатками известного технического решения являются:
- отказ единой топливной системы с баком для питания всех двигателей приводит к остановке всех двигателей сразу, а посадка на авторотации невозможна в силу малого диаметра пропеллеров и тормозящих сил в двигателях, что не обеспечивает безопасности полета через резервирование;
- высокая сложность управления двигателями, необходимость постоянно выдерживать высокие обороты для сохранения оптимального режима работы двигателя. Данная система увеличивает массу аппарата, снижает его надежность, добавляет лишний обслуживаемый узел у каждого мотора. Совокупность недостатков системы движителя приводит к раскачкам ЛА даже в безветрие с перспективой потери стабилизации и аварии;
- невозможность вертикального взлета/посадки на стандартное парковочное место 2,5×5 м вследствие больших габаритов.
Из уровня техники известен ЛА (см. http://www.e-volo.com/, заявка US 2015012154 на изобретение, опубл. 08.01.2015, Заявитель: VOLO GMBH Е [DE].
ЛА содержит 16 горизонтально расположенных электродвигателей с пропеллерами, кабину пилота и аккумуляторную батарею в ней, а также систему спасения всего аппарата парашютного типа.
Винты неподвижно закреплены на осях электродвигателей. Изменение высоты полета, поворот и горизонтальное движение обеспечивается исключительно за счет уменьшения или увеличения оборотов двигателей. Положение и направление полета автоматически поддерживают несколько независимых и взаимно контролируемых компьютеров ((), управляя индивидуальной скоростью вращения каждого двигателя. ЛА содержит датчики положения для управления ориентацией ЛА, один блок обработки сигнала, предназначенный для автоматического управления ориентацией на основе данных измерений, поступающих от датчика ориентации, регулируя скорость мотора для ориентации по горизонту, блок обработки сигнала строится как процессор цифровых сигналов, микроконтроллер, FPGA цифровой контроллер, аналоговый процессор, аналоговый компьютер или аналоговый контроллер.
Недостатками известного технического решения являются:
- система спасения парашютного типа не предотвращает аварию, а лишь смягчает ее последствия;
- большие массогабаритные показатели и невозможность взлета-посадки со стандартного парковочного места 2,5×5 метров вследствие наличия 16 двигателей с пропеллерами большого размера и массы;
- зависимая энергосистема, где все двигатели питаются от одной батареи, что не обеспечивает безопасности полета через резервирование, т.к. отказ батареи ведет к отказу всех двигателей сразу.
Из уровня техники известен мультикоптер (см. патент РФ 2577822 на изобретение, опубл. 20.03.2016).
Мультикоптер содержит платформу винтомоторной группы из продольных силовых балок - лонжеронов, расположенных вдоль полета, к лонжеронам крепятся поперечные силовые балки, на оконечностях которых устанавливаются электромоторы с несущими воздушными винтами, снизу к платформе прикрепляется грузопассажирская кабина с пакетами аккумуляторов, при этом количество винтомоторных установок должно обеспечивать грузоподъемность мультикоптера в вариантах воздушного робота, воздушного мотоцикла, микроавтомобиля, грузотакси, автобуса, боевой машины пехоты и пр.
Недостатками известного технического решения являются:
- большие массогабаритные показатели вследствие наличия винтомоторной группы из множества продольных силовых балок - лонжеронов с поперечными силовыми балками, на которых установлены двигатели с винтами;
- невозможность взлета-посадки со стандартного парковочного места 2,5×5 метров вследствие больших габаритов.
Из уровня техники известен аэробайк (см. патент РФ 127039 на полезную модель, опубл. 20.04.2013).
Аэробайк включает несущую раму прямоугольной формы, восемь попарно установленных моторов с двух, трех или четырехлопастными пропеллерами, закрепленных на углах рамы, два блока горизонтальной стабилизации, фюзеляж и место пилота, два блока горизонтальной стабилизации. На углах прямоугольной рамы жестко крепятся восемь электромоторов.
Недостатками известного технического решения являются:
- маленькая дальность, продолжительность и скорость прямолинейного полета;
- большие массогабаритные характеристики и невозможность взлета/посадки со стандартного парковочного места 2,5×5 метров;
- отказ хотя бы одного пропеллера или двигателя из четырех ведет к аварии, что приводит к низкой безопасности полета;
- сложность конструкции ввиду использования восьми попарно установленных моторов с пропеллерами.
Из уровня техники известен многороторный пассажирский ЛА (см. заявка AU 2016100121 на изобретение, опубл. 10.03.2016).
ЛА включает пассажирскую кабину и попарно расположенные, разнесенные от корпуса кабины пилота, двигатели с винтами. Первый винт и второй винт расположены вертикально на одном и том же плече ЛА. Винты меньшего размера установлены как выше, так и ниже каждого плеча воздушного судна. Шасси расположено в нижней части корпуса ЛА. Четыре двигателя с пропеллерами расположены симметрично относительно пассажирской кабины.
Недостатками известного технического решения являются:
- маленькая дальность, продолжительность и скорость прямолинейного полета;
- большие массогабаритные характеристики и невозможность взлета/посадки со стандартного парковочного места 2,5×5 метров;
- сложность конструкции ввиду использования попарно установленных моторов с пропеллерами.
Раскрытие сущности изобретения
Техническим результатом заявленного изобретения являются:
- увеличение дальности и скорости полета ЛА;
- уменьшение массогабаритных показателей с обеспечением вертикального взлета-посадки со стандартного парковочного места 2,5×5 метров;
- обеспечение безопасности полета ЛА;
- повышение экологичности;
- повышение аварийно-устойчивости ЛА.
- повышение эффективности ЛА;
- обеспечение малошумности ЛА;
- обеспечение экономии энергии аккумуляторов при полете ЛА.
Технический результат достигается тем, что малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета включает:
- съемные пассажирскую кабину, сиденье пилота или грузовой отсек;
- маршевые и взлетно/посадочные электрические турбины типа Вентури, представляющие собой ротор турбины с лопаточным аппаратом с приводом от электромотора в корпусе, состоящим из заборника и выходного сопла турбины по принципу сопла Лаваля с инжектором Вентури;
- динамическое крыло, имеющее складной профиль с шарнирами с возможностью сдвига для изменения угла атаки всего крыла и создания необходимой подъемной силы или торможения, при этом складное динамическое крыло в разложенном виде выполнено с возможностью экономии энергии аккумуляторов и преодоления больших расстояний после вертикального взлета, переходя в режим полета раскладываясь в горизонтальной плоскости включением маршевых электрических турбин Вентури для создания горизонтальной тяги, а при наборе скорости маршевые электрические турбины Вентури выполнены с возможностью автоматического отключения для экономии энергии;
- количество движителей составляет не менее 8, что исключает аварию в случае выхода из строя одного из движителей,
- полетный компьютер с программным обеспечением выполнен с возможностью по заранее заданной программе управления устройствами и элементами, балансировкой и режимами полета, углом атаки, режимами полета ЛА и экономией энергии с возможностью беспилотной эксплуатации ЛА;
- при этом во время полета ЛА при возникновении аварийных (нештатных) ситуаций, на одном из движителей, сигнал ошибки с неисправного движителя фиксируется процессором и датчиками и мгновенно поступает на полетный компьютер, который по заданной программе определяет соответствующую неисправность, выдает команду (сигнал) управления на мгновенное отключение неисправного движителя и равномерное перераспределение и увеличение тяги к другим работающим исправно работающим движителям, обеспечивая стабилизацию в воздухе по горизонту и аварийную, в случае необходимости, плавную безопасную посадку ЛА по вертикали
Краткое описание чертежей
Признаки и сущность заявленного изобретения поясняется в последующем детальном описании, иллюстрируемом чертежами, где показано следующее.
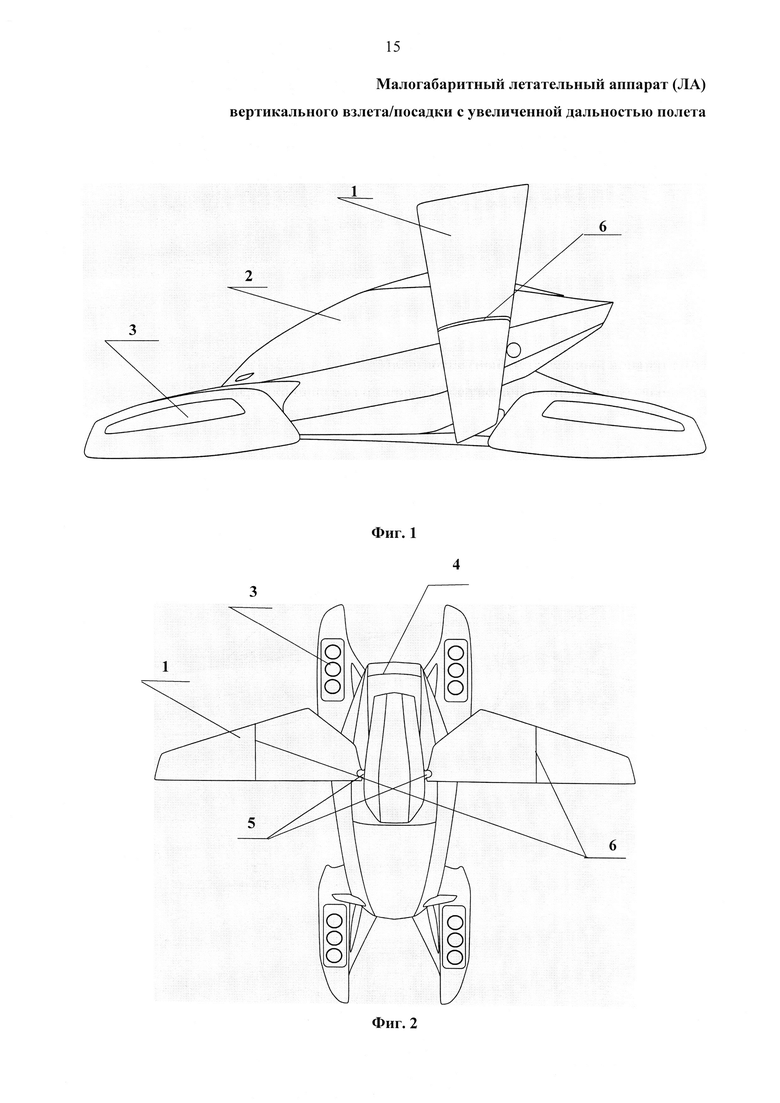
На фиг. 1 - пример реализации ЛА - пассажирский дрон автомобиль (вид сбоку).
На фиг. 2 - пример реализации ЛА - пассажирский дрон автомобиль (вид сверху).
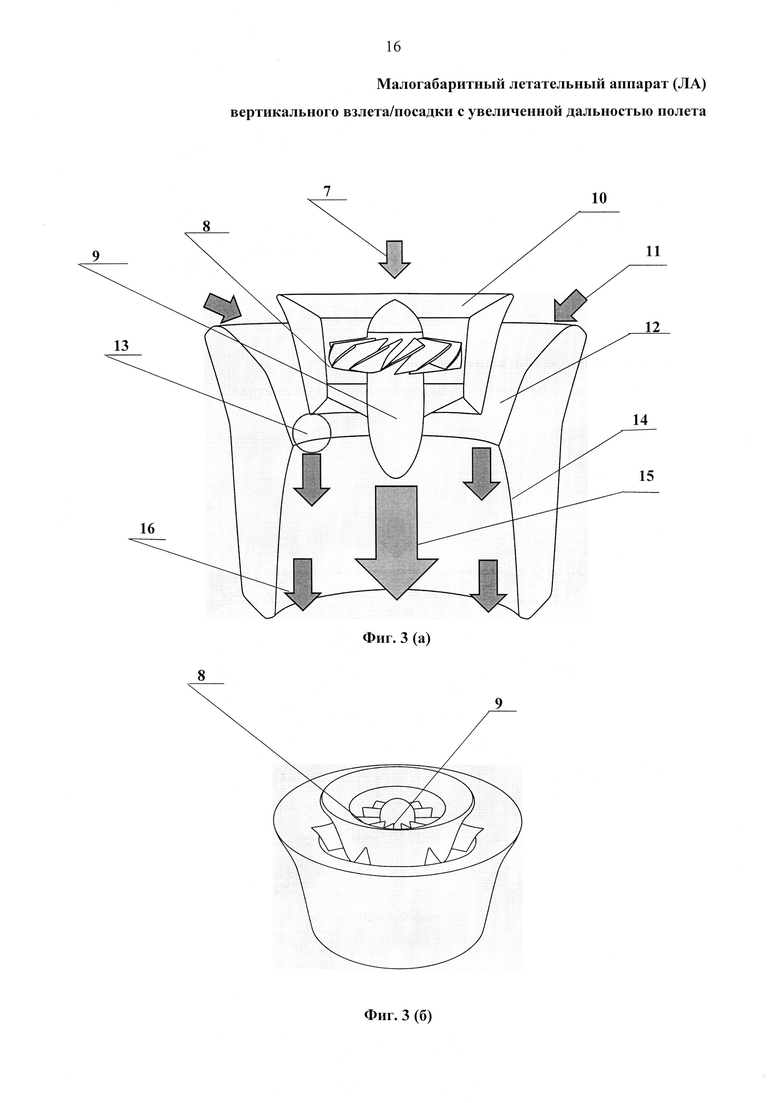
На фиг. 3 (а, б) - разрез турбины Вентури.
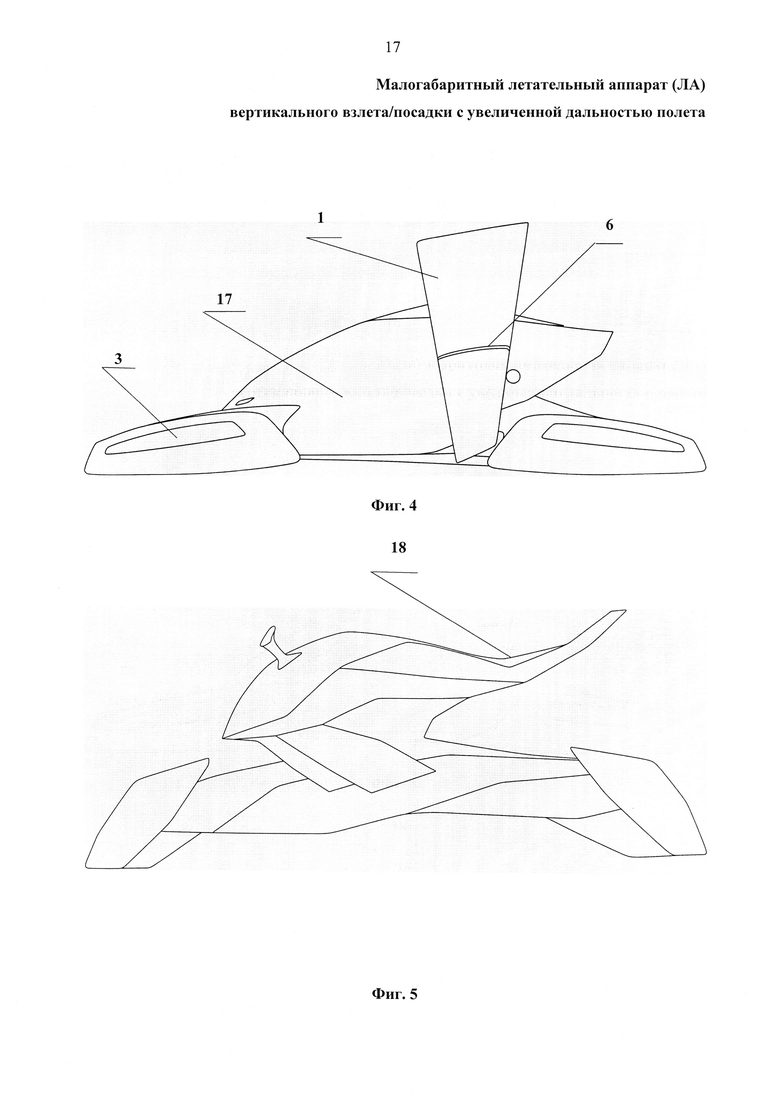
На фиг. 4 - пример реализации ЛА - грузовой дрон.
На фиг. 5 - пример реализации ЛА - пассажирский дрон мотоцикл.
На фигурах 1-5 обозначено следующее:
1 - складное динамическое гибридное крыло;
2 - пассажирская кабина;
3 - турбины Вентури для вертикального взлета/посадки;
4 - маршевые турбины Вентури для прямолинейного полета;
5 - основные шарниры динамического крыла;
6 - складные шарниры динамического крыла;
7 - входной воздушный поток;
8 - ротор турбины Вентури;
9 - электрический двигатель турбины Вентури;
10 - заборник турбины Вентури;
11 - инжектируемый поток;
12 - инжектор Вентури круговой;
13 - зона пониженного давления;
14 - выходное сопло типа Лаваля турбины Вентури;
15 - высокоскоростной поток;
16 - низкоскоростной поток;
17 - грузовой отсек;
18 - сиденье пилота.
Осуществление изобретения
Для осуществления полета малогабаритного ЛА (см. фиг. 1 и 2) осуществляется вертикальный взлет при помощи турбин Вентури (3). Перемещение в пространстве возможно исключительно при помощи тяги от турбин Вентури (3) для вертикального взлета/посадки в режиме коптера. Пассажиры размещаются в кабине (2). При необходимости перелета на значительное расстояние, после вертикального взлета складное динамическое гибридное крыло (1) переходит в режим полета раскладываясь в горизонтальной плоскости. После этого подключаются маршевые турбины Вентури (4) для создания горизонтальной тяги и прямолинейного полета. При наборе скорости, турбины Вентури (3) для вертикального взлета/посадки отключаются для экономии энергии. Подъемная сила складного динамического гибридного крыла (1) обеспечивает удержание ЛА. Приземление происходит в обратном порядке. Балансировкой и режимами полета управляет полетный компьютер.
Складное динамическое гибридное крыло (1) складывается при посадке при помощи складных шарниров (6). Таким образом ЛА имеет возможность взлета/посадки на стандартное парковочное место автомобиля размером 2,5×5 метров. При полете угол атаки складного динамического гибридного крыла (1) изменяется при помощи основных шарниров (5), таким образом создавая максимальную подъемную силу или торможение. Использование всей площади складного динамического гибридного крыла (1) при этом гораздо эффективнее использования отдельных его частей, как в случае с элеронами или закрылками. Углом атаки, режимами складного динамического гибридного крыла (1) управляет полетный компьютер.
Турбины Вентури (см. фиг. 3а, б) представляют собой ротор (8) турбины с лопаточным аппаратом с приводом от электромотора (9) в корпусе, состоящем из заборника (10) и выходного сопла (14) турбины типа Лаваля. В отличие от пропеллера турбина Вентури вращается на значительно больших оборотах и имеет замкнутую окольцовку, что приводит к достижению равной тяги с пропеллером, при значительно меньших габаритах. Входной воздушный поток (7) засасывается в турбину ротором (8) и разгоняется в выходном сопле турбины (14) типа Лаваля. Форма выходного сопла турбины (14) построена по принципу сопла Лаваля, что дополнительно ускоряет воздушный поток при прохождении через турбину, по аналогии с ракетными двигателями. При этом в области инжектора Вентури кругового (12) под действием эффекта Вентури образуется зона пониженного давления (13). Атмосферный воздух стремится в зону пониженного давления (13), как инжектируемый поток (11) через инжектор Вентури круговой (12). Таким образом, вместо только потока от турбины Вентури проявляется еще дополнительный поток от инжектора Вентури кругового (12), что приводит к росту эффективности устройства в целом при генерации тяги. Снижение шумности турбины Вентури происходит за счет того, что высокоскоростной и более шумный поток (15) оказывается в центре менее шумного низкоскоростного потока (16). Низкоскоростной поток (16) обволакивает по кругу более высокоскоростной поток (15), выступая в роли экрана для звука. Применение электрического привода (9) турбины Вентури вызвано требованиями к экологичности ЛА и исключению выгорания стартовой площадки, которое возможно при использовании газовых или жидко-топливных турбин с высокой температурой выходного потока.
ЛА может быть реализован с любым количеством турбин Вентури для обеспечения необходимой тяги. Также ЛА может быть реализован в виде летающего мотоцикла (см. фиг. 5), отличием которого является сиденье пилота (18) вместо пассажирской кабины, или в виде грузового дрона (см. фиг. 4), где вместо пассажирской кабины присутствует грузовой отсек (17).
Для снижения шума и температуры генерируемого потока для вращения ротора турбины применяется электропривод.
Складное динамическое крыло в разложенном виде выполнено с возможностью экономии энергии аккумуляторов и преодоления больших расстояний после вертикального взлета, переходя в режим полета раскладываясь в горизонтальной плоскости включением маршевых электрических турбин Вентури для создания горизонтальной тяги, а при наборе скорости маршевые электрические турбины Вентури выполнены с возможностью автоматического отключения для экономии энергии.
Количество движителей составляет не менее 8, что исключает аварию в случае выхода из строя одного из движителей.
Полетный компьютер с программным обеспечением выполнен с возможностью по заранее заданной программе управления устройствами и элементами, балансировкой и режимами полета, углом атаки, режимами полета ЛА и экономией энергии с возможностью беспилотной эксплуатации ЛА;
- при этом во время полета ЛА при возникновении аварийных (нештатных) ситуаций, на одном из движителей, сигнал ошибки с неисправного движителя фиксируется процессором и датчиками и мгновенно поступает на полетный компьютер, который по заданной программе определяет соответствующую неисправность, выдает команду (сигнал) управления на мгновенное отключение неисправного движителя и равномерное перераспределение и увеличение тяги к другим работающим исправно работающим движителям, обеспечивая стабилизацию в воздухе по горизонту и аварийную, в случае необходимости, плавную безопасную посадку ЛА по вертикали.
Динамическое крыло (1) закреплено к ЛА при помощи подвижных шарниров с электроприводом. Турбины Вентури (3) собраны в блоки с равным количеством турбин на каждый угол ЛА и эти блоки закреплены на угловых частях корпуса ЛА в монолитном корпусе.
Шарнирные элементы складного крыла позволяют сделать складную конструкцию с возможностью регулировки оптимального угла расположения крыльев в вертикальной и горизонтальной плоскостях.
Увеличение дальности полета достигается за счет размещения на верхней части корпуса кабины пилота складного крыла.
Высокая скорость прямолинейного полета достигается за счет установки на задней части корпуса дополнительного блока маршевых турбин Вентури.
Складное крыло закреплено шарнирно на корпусе ЛА (на боковых частях корпуса ЛА). Складное крыло имеет складные шарниры вдоль обеих продольных, относительно корпуса ЛА, частей крыла с возможностью раскрытия и свертывания при посадке и полете.
Для вертикального взлета/посадки ЛА подъемная сила создается не пропеллерами, а гораздо меньшими по размеру электрическими турбинами типа Вентури.
При прямолинейном полете подъемная сила обеспечивается наличием крыла.
При полете угол атаки крыла изменяется при помощи основных шарниров, таким образом создавая максимальную подъемную силу или торможение.
Для обеспечения взлета/посадки ЛА на стандартное парковочное место автомобиля 2,5×5 метров крыло выполнено с возможностью складывания при помощи складных шарниров.
Количество турбин на один летательный аппарат составляет от 8 шт., что исключает аварию в случае выхода из строя одного из движителей, как в случае с квадрокоптером с 4-мя несущими движителями.
Дальность полета достигается за счет использования динамического крыла (1), имеющего складной профиль, что позволяет при посадке или взлете занимать стандартное парковочное место автомобиля, однако в разложенном виде крыло позволяет экономить энергию аккумуляторов и преодолевать значительно большие расстояния. Крыло также подвижно у основания, что позволяет менять угол атаки всего крыла, а не отдельных его частей, что позволяет более эффективно использовать площадь крыла в отличие от использования элеронов или закрылков.
Применение эффекта Вентури и сопла Лаваля позволяет снизить шумность турбин и повысить их эффективность за счет подсоса атмосферного воздуха вследствие проявления эффекта Вентури.
Для перехода из режима вертикального взлета в прямолинейный полет не используется поворотный механизм движителей. За режим прямолинейного полета отвечает отдельный блок турбин Вентури, что обеспечивает безопасность переходных режимов.
Динамическое складное гибридное крыло (1) закреплено к ЛА при помощи подвижных шарниров с электроприводом. Турбины Вентури (3) собраны в блоки с равным количеством турбин на каждый угол ЛА и эти блоки закреплены на угловых частях корпуса ЛА в монолитном корпусе.
Шарнирные элементы складного крыла позволяют сделать складную конструкцию с возможностью регулировки оптимального угла расположения крыльев в вертикальной и горизонтальной плоскостях.
Увеличение дальности полета достигается за счет размещения на верхней части корпуса кабины пилота складного крыла.
Высокая скорость прямолинейного полета достигается, в предпочтительном варианте, за счет установки на задней части корпуса дополнительного блока маршевых турбин Вентури.
Складное крыло закреплено шарнирно на корпусе ЛА (на боковых частях корпуса ЛА). Складное крыло имеет складные шарниры вдоль обеих продольных, относительно корпуса ЛА, частей крыла с возможностью раскрытия и свертывания при посадке и полете.
На данный момент изготовлен опытный образец, проведены испытания и демонстрация возможностей ЛА в Инновационном Центре Сколково, показаны компьютерные расчеты и моделирования. Испытания опытного образца подтвердили надежность и безопасность полета ЛА.
Проведенный анализ уровня техники позволил установить: аналоги с совокупностью существенных признаков, тождественных существенным признакам заявленного ЛА, отсутствуют, что указывает на соответствие заявленного ЛА условию патентоспособности «новизна».
Результаты поиска известных решений с целью выявления существенных признаков, совпадающих с отличительными от аналогов существенными признаками заявленного ЛА, показали, что они не следуют явным образом из уровня техники, а также не установлена известность влияния отличительных существенных признаков на указанный авторами технический результат. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Несмотря на то, что заявленное изобретение показано и описано со ссылкой на его определенные предпочтительные варианты осуществления, специалистам в данной области техники будет понятно, что различные изменения по форме и содержанию могут быть сделаны в нем без отклонения от сущности и объема изобретения, которые определены прилагаемой формулой изобретения с учетом описания и чертежей.
Малогабаритный летательный аппарат вертикального взлета/посадки содержит съемные пассажирскую кабину, сиденье пилота или грузовой отсек, маршевые и взлетно-посадочные электрические турбины типа Вентури, представляющие собой ротор турбины с лопаточным аппаратом с приводом от электромотора в корпусе, состоящем из заборника и выходного сопла турбины по принципу сопла Лаваля с инжектором Вентури, динамическое крыло, имеющие складной профиль с шарнирами, не менее восьми движителей, полетный компьютер. Обеспечивается увеличение дальности и скорости полета, уменьшение массогабаритных показателей, увеличение безопасности полета, повышение экологичности, аварийной устойчивости, малошумности. повышение экономии энергии аккумуляторов при полете. 6 ил.
Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета, включающий:
- съемные пассажирскую кабину, сиденье пилота или грузовой отсек;
- маршевые и взлетно-посадочные электрические турбины типа Вентури, представляющие собой ротор турбины с лопаточным аппаратом с приводом от электромотора в корпусе, состоящим из заборника и выходного сопла турбины по принципу сопла Лаваля с инжектором Вентури;
- динамическое крыло, имеющее складной профиль с шарнирами с возможностью сдвига для изменения угла атаки всего крыла и создания необходимой подъемной силы или торможения, при этом складное динамическое крыло в разложенном виде выполнено с возможностью экономии энергии аккумуляторов и преодоления больших расстояний после вертикального взлета, переходя в режим полета раскладываясь в горизонтальной плоскости включением маршевых электрических турбин Вентури для создания горизонтальной тяги, а при наборе скорости маршевые электрические турбины Вентури выполнены с возможностью автоматического отключения для экономии энергии;
- количество движителей составляет не менее 8, что исключает аварию в случае выхода из строя одного из движителей;
- полетный компьютер с программным обеспечением выполнен с возможностью по заранее заданной программе управления устройствами и элементами, балансировкой и режимами полета, углом атаки, режимами полета ЛА и экономией энергии с возможностью беспилотной эксплуатации ЛА;
- при этом во время полета ЛА при возникновении аварийных (нештатных) ситуаций, на одном из движителей, сигнал ошибки с неисправного движителя фиксируется процессором и датчиками и мгновенно поступает на полетный компьютер, который по заданной программе определяет соответствующую неисправность, выдает команду (сигнал) управления на мгновенное отключение неисправного движителя и равномерное перераспределение и увеличение тяги к другим исправно работающим движителям, обеспечивая стабилизацию в воздухе по горизонту и аварийную, в случае необходимости, плавную безопасную посадку ЛА по вертикали.
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ | 2014 |
|
RU2563921C1 |
| Красочный аппарат для адресопечатающих машин | 1934 |
|
SU43901A1 |
| RU 2014151977 А, 10.07.2016 | |||
| US 20150336663 A1, 26.11.2015 | |||
| US 20030006339 A1, 09.01.2003. | |||

