Настоящее изобретение относится к областям биомеханики и клеточной биологии и может быть использовано в широком спектре исследований молекулярных взаимодействий в системах «антиген-антитело», «вирус-про-эукариоцит» или «лиганд-рецептор» с использованием метода оптической ловушки (соответствующую измерительную установку называют «оптическим пинцетом»).
Проведение подобных исследований обусловлено необходимостью расшифровки тонких механизмов физико-химического, иммунохимического взаимодействия биообъектов в целях разработки или совершенствования медицинских средств (диагностических, профилактических, лечебных).
Метод оптической ловушки для манипулирования микрообъектами был предложен в середине 80-х гг. прошлого века [Ashkin A., Dziedzic J.M. Optical trapping and manipulation of viruses and bacteria // Science. - 1987. - Vol. 235. - P. 1517-1520]. Метод основан на физическом феномене захвата и удерживания в фокальной области сильно сфокусированного светового пучка диэлектрических микрообъектов, например стеклянных либо полистироловых микросфер. Для создания оптической ловушки обычно используют лазерный луч, пропускаемый через объектив микроскопа с большими показателями увеличения и числовой апертуры. На основе этого методического подхода были получены новые знания во многих областях биофизики, биохимии, биомеханики, иммунологии, клеточной биологии. Для качественной или количественной оценки изучаемых взаимодействий в зависимости от цели, объекта, условий проведения эксперимента применяются различные варианты осуществления метода оптической ловушки.
Известен способ изучения сил, определяемых функционированием цитоскелета эукариоцитов, с помощью оптической ловушки [Farrell В. et al. Measuring forces at the leading edge: a force assay for cell motility // Integr Biol (Camb). - 2013. - Vol. 5, №1. - P. 204-214]. В соответствии с процедурой способа адгезированная на стеклянной подложке клетка автоматически при постоянной скорости 1 мкм/сек подводилась к сульфатированной полистироловой микросфере и через 5-15 сек контакта, необходимого для достаточно прочной адгезии, с той же скоростью отводилась от микросферы на определенное расстояние с образованием вытягивающейся от клетки мембранной «трубки». Одновременно проводилась регистрация силовой кривой (axial membrane force) от момента завершения растяжения «трубки» в течение периода релаксации (3÷10 мин).
Недостатки данного технического решения, делающие некорректным его применение для оценки силы отрыва микросферы от эукариоцита, состоят в использовании автоматического подведения клетки к микросфере, не корректируемого оператором на завершающем этапе сближения, а также значительной длительности и широком диапазоне значений периода контакта (5÷15 сек). За такой период времени должно происходить необратимое залипание микросферы, вероятность ее отрыва от клетки чрезвычайно низка даже при использовании большей жесткости ловушки по сравнению с примененной авторами (0,1÷0,2 пН/нм).
Известен также способ изучения динамики связывания сенсибилизированных липополисахаридом (ЛПС) Escherichia coli микросфер с поверхностью эукариотических клеток [Wei М.-Т. et al. The interaction of lipopolysaccharide with membrane receptors on macrophages pretreated with extract of Reishi polysaccharides measured by optical tweezers // Optics Express. - 2007. - Vol. 15, №17. - P. 11020-11032]. Для этого авторы подводили столик с распластанными на покровном стекле эукариоцитами к сенсибилизированной микросфере, фиксированной лазерным лучом с мощностью 15 мВт. При такой мощности среднеквадратичная амплитуда броуновских смещений микросферы в ловушке составляла 50 нм. О моменте контакта и постконтактного смещения микросферы эукариоцитом на 50 нм они судили по изменению сигнала квадрантного фотодетектора (КвФД). Далее столик одномоментно отводили от микросферы на расстояние 100 нм и снижали мощность лазера до 1 мВт, что обеспечивало увеличение среднеквадратичной амплитуды броуновских смещений микросферы до 150 нм. Далее авторы отслеживали динамику связывания микросферы с эукариоцитом, регистрируя зависимость расстояния между поверхностями этих объектов от времени. Вычисляемая константа времени практически экспоненциального убывания этого расстояния характеризует интенсивность взаимодействия микросферы с эукариоцитом. Однако такая характеристика является косвенной и не позволяет получить практически важную константу силового взаимодействия.
Недостатком данного технического решения является то, что не определены условия осуществления фазы подведения, связанные с морфологическими особенностями строения эукариоцитов (наличием филоподий), а также время контакта, от которого зависит сила связывания. Не сформулированы четко и критерии контакта микросфер с клетками, а в качестве установочного параметра прибора используется не коэффициент жесткости оптической ловушки, а мощность лазера. Все это не позволяет стандартизировать методику в условиях работы с другим прибором. Метод описанного аналога не предназначен для определения силы отрыва в системе «микросфера - клетка».
Наиболее близким к заявленному техническому решению является способ оценки сил связывания антигена вируса гриппа с поверхностью эукариоцитов [Sieben С. et al. Influenza virus binds its host cell using multiple dynamic interactions // PNAS. - 2012. - Vol. 109, №34. - P. 13626-13631]. В рамках исследования адгезивных свойств белковых антигенов предлагается использовать в качестве носителей полистироловые или стеклянные микросферы диаметром 1,5 мкм и оценивать напрямую силы, необходимые для отрыва микросфер от клеток.
В этом случае методика регистрации силовых характеристик взаимодействия антигенов с поверхностью клеток включает следующие этапы: сенсибилизация полистироловых микросфер вирионами вируса гриппа АХ31; автоматическое подведение микросфер к адгезированным клеткам в жидкой фазе; автоматическое отведение микросфер после контактирования с клеточной поверхностью; обработка полученных данных и вычисление величины сил отрыва.
Общими существенными признаками описанного аналога и предлагаемого решения являются: автоматическое отведение после контактирования, регистрация непосредственно силы отрыва сенсибилизированной микросферы от клетки.
Недостатком данного технического решения является то, что в нем отсутствуют указания как на критерии достоверной констатации факта возникновения физического контакта между поверхностью клетки и микросферой, так и на длительность этого контакта. При разработке подхода не учитывается также возможный эффект существенного искажения сигнала фотоприемника КвФД, регистрирующего смещения микросферы при отрыве от клетки. Такое искажение может возникать за счет дополнительного рассеяния лазерного излучения близко расположенным подвижным крупным объектом - исследуемой клеткой. Кроме того, подведение осуществляется в полностью автоматическом режиме, без корректирующего воздействия оператора. Это не позволяет в достаточной мере адекватно контролировать момент физического контакта между микросферой и поверхностью клетки, а также глубину вдавливания микросферы в тело клетки. Эти факторы могут существенно влиять на силу связывания названных объектов.
Задачей, на решение которой направлено заявляемое изобретение, является разработка способа определения прочности связывания сенсибилизированных микросфер и фиксированных на твердой фазе эукариоцитов путем количественной оценки силы разрыва связи с помощью оптического пинцета.
Данная задача решается за счет того, что в заявленном способе, включающем последовательно подготовку культуры адгезированных эукариоцитов, калибровку оптического пинцета, подведение пьезостоликом клетки к удерживаемой сфокусированным лучом лазера микросфере до их соприкосновения, отведение пьезостолика с автоматической регистрацией динамики исследуемого взаимодействия между клеткой и микросферой, обоснованы условия проведения отдельных стадий способа, а также критерии соприкосновения микросфер с поверхностью исследуемых эукариоцитов и критерии выбраковки первичных данных на фазе подведения и отведения столика.
Технический результат заявляемого решения заключается в улучшении контроля за количественной оценкой силы связывания сенсибилизированных микросфер и фиксированных макрофагов методом оптической ловушки, а также повышении точности изменения параметров, характеризующих упомянутую силу.
Указанный технический результат достигается тем, что прецизионное подведение клетки к микросфере проводится в ручном режиме, момент контакта микрообъектов с погрешностью не более 50 нм устанавливается по наличию на непрерывно регистрируемой силовой кривой характерных изменений, соответствующих обоснованным критериям, а величина силы отрыва микросферы от клетки вычисляется автоматически по амплитуде характерного скачка на силовой кривой, обусловленного изменением положения микросферы в оптической ловушке в результате отрыва.
Заявляемый способ представляет собой следующую последовательность манипуляций (соответственно, существенных признаков):
1. Подготовка культуры эукариоцитов.
2. Калибровка оптического пинцета.
3. Осуществление процедуры сближения адгезированного эукариоцита и микросферы в соответствии со специально выработанным алгоритмом, с регистрацией формирования между ними физического контакта.
4. Осуществление специально выработанной процедуры отведения столика с эукариоцитом от микросферы.
5. Статистическая обработка данных регистрации сил отрыва.
Между совокупностью существенных признаков заявляемого способа и достигаемым техническим результатом существует причинно-следственная связь, поскольку исключение из процедуры измерений любой из указанных выше манипуляций не позволяет получить заявляемый результат.
Возможность осуществления заявляемого изобретения показана следующими примерами.
Пример 1. Определение момента физического контакта микросферы и клетки J-774.
Подготовка эукариоцитов линии J-774 (гистиоцитарная саркома мыши) осуществлялась по методике, подробно описанной в работе [Wei М.-Т. et al. The interaction of lipopolysaccharide with membrane receptors on macrophages pretreated with extract of Reishi polysaccharides measured by optical tweezers // Optics Express. - 2007. - Vol. 15, №17, P. 11020-11032].
Перед подведением столика с клеткой J-774 к неподвижной микросфере, удерживаемой лазерным лучом, производили настройку параметров оптического пинцета. Для этого захватывали микросферу лазерным лучом мощностью 1000 мВт. В отдалении от клетки J-774 (не менее 5 мкм) производили калибровку прибора, меняя значение мощности лазера до тех пор, пока значение коэффициента жесткости системы «микросфера в ловушке» не оказывалось в диапазоне 240-300 мкН/м. Сопутствующее значение коэффициента чувствительности квадрантного фотодетектора при этом составляло 25-30 мВ/нм.
Были использованы следующие условия проведения экспериментов:
а) первоначальное расстояние между микросферой и клеткой J-774 не фиксировалось и определялось визуально, составляя 3-4 мкм;
б) шаг подведения пьезостолика при ручном режиме - 50 нм;
в) направление подведения и отведения - горизонтальное;
г) скорость подведения в ручном режиме - 2-3 шага в секунду;
д) скорость автоматического отведения пьезостолика - 100 нм в секунду;
е) частота оцифровки сигнала фотодетектора - 1000 Гц.
Затем выбирали объект (клетку J-774), которую планировали подводить к микросфере, руководствуясь следующими критериями:
а) клетка J-774 не находится в стадии разрушения;
б) выбранный участок цитоплазматической мембраны не содержит визуально различимых филоподий (специфических выростов на клеточной поверхности);
в) микросфера, захваченная ловушкой, позиционируется на высоте 3-4 мкм от дна чашки.
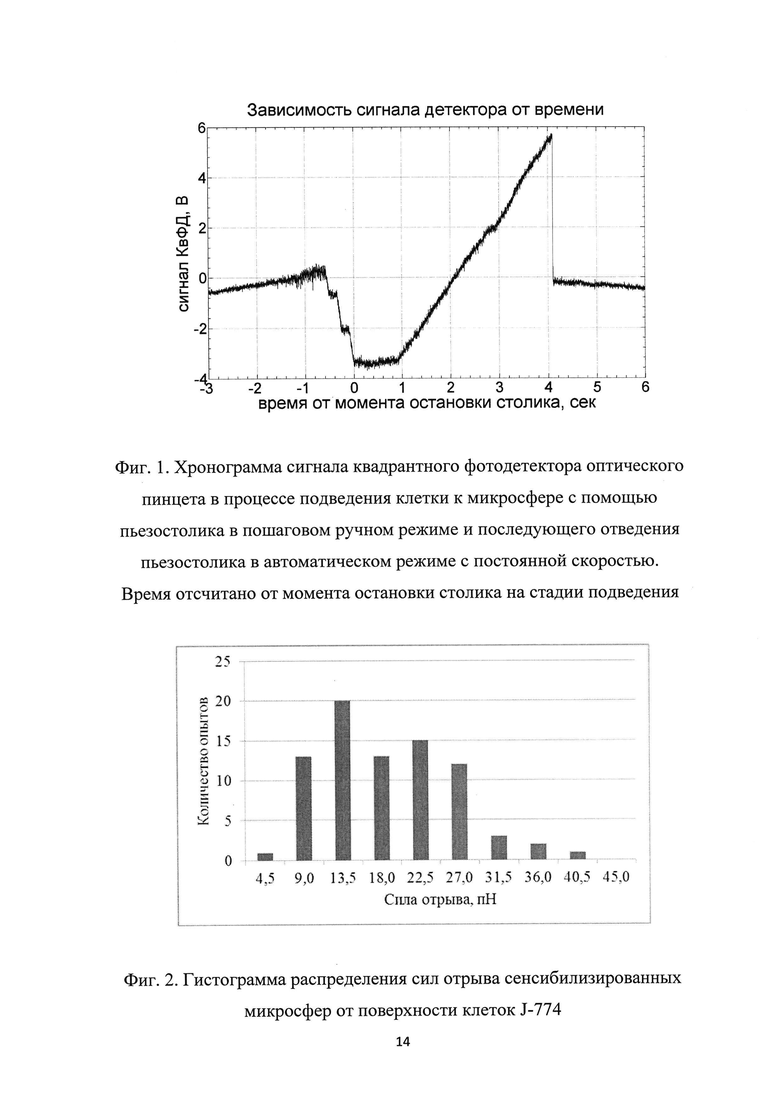
Задав начальную конфигурацию эксперимента, начинали пошаговое подведение клетки J-774 к микросфере пьезостоликом с шагом 50 нм, производя 2-3 шага в секунду в ручном режиме путем последовательных активаций соответствующей кнопки интерфейса программы управления. Процесс подведения и касания клеткой J-774 микросферы контролировали визуально по выводимой на монитор хронограмме сигнала квадрантного фотодетектора, регистрирующего смещения микросферы в ловушке (Фиг. 1). Показателями достоверности касания считали появление на хронограмме сигнала трех инвертированных (нисходящих) ступеней повышенной амплитуды в ответ на три последовательных шага столика, а также предшествующее этим признакам изменение амплитуды броуновских смещений микросферы (Фиг. 1). Это свидетельствовало о соприкосновении с клеткой J-774 микросферы и последующем ее смещении от центра ловушки под действием клетки J-774. Длительность стадии подведения, от начала движения до формирования указанных выше трех нисходящих ступеней, регистрировали секундомером. С помощью датчика координат столика фиксировали пройденное им расстояние.
В процессе подведения клетки J-774 и ее отведения от лазерного луча производилась регистрация и запись в память компьютера зависимости сигнала КвФД, регистрирующего положение микросферы в ловушке, от времени (хронограммы сигнала).
Основным фактором, определяющим резкие изменения формы и шумовой структуры хронограммы сигнала КвФД, является сам факт соприкосновения микросферы с достаточно жесткой, но динамически нестабильной поверхностью клетки J-774. Регистрируемые изменения сигнала обусловлены как общим смещением микросферы от центра ловушки под действием подводимой клетки J-774, так и колебаниями поверхности клетки J-774, обусловленными активными клеточными процессами.
Анализ влияния указанных факторов на форму хронограммы сигнала КвФД позволяет сформулировать следующие критерии инструментальной идентификации момента соприкосновения микросферы и подводимой клетки J-774:
- смена полярности скачков сигнала КвФД, возникающих в ответ на последовательные шаговые передвижения клетки J-774;
- синхронное появление на хронограмме сигнала серии резких однонаправленных скачков повышенной амплитуды (например, три последовательные ступеньки сигнала на рисунок 1 в опыте перед остановкой столика;
- существенное изменение амплитуды мгновенных броуновских смещений микросферы, непосредственно предшествующее проявлению двух первых признаков.
Согласно этим критериям в опыте, результаты которого представлены на Фиг. 1, физический контакт клетки J-774 с микросферой произошел приблизительно за 0,6 сек до остановки пьезостолика. После контакта микросфера совершила три последовательных смещения от центра ловушки под действием клетки J-774.
Пример 2. Определение величины силы разрыва связи между микросферой и эукариоцитом
Все настройки прибора и весь пространственно-временной график стадий подведения и отведения клетки J-774 идентичны указанным для Примера 1.
Последовательности действий на стадии подведения клетки J-774 в опыте идентична описанной в Примере 1. После появления на отслеживаемой по монитору хронограмме сигнала КвФД трех нисходящих высокоамплитудных ступеней, свидетельствующих согласно сформулированному выше критерию о возникновении физического контакта между поверхностями микросферы и клетки J-774, столик останавливают. Вслед за этим за время, не превышающее 1 секунду, переводят пьезостолик в режим автоматического отведения с заданной постоянной скоростью на заданное расстояние.
Зарегистрированный физический контакт клетки J-774 с микросферой может, вообще говоря, иметь три исхода: отсутствие адгезивного связывания между поверхностями объектов; обратимое (в масштабе силовых характеристик оптической ловушки) связывание, характеризуемое некоторой силой разрыва возникшей связи; необратимую (в этом же масштабе сил) связь микросферы с клеткой J-774, иными словами, прилипание микросферы. Во втором случае, иллюстрируемом Фиг. 1, отведение пьезостолика с клеткой J-774, приводящее к смещению микросферы от центра ловушки, обусловливает линейный рост оптической силы, удерживающей микросферу в ловушке. При увеличении этой силы (если его обеспечивают параметры ловушки - мощность лазера и характеристики фокусирующей системы) до величины силы связывания клетки J-774 с микросферой происходит разрыв связи и почти мгновенное, за время порядка микросекунд, возвращение отклонившейся микросферы в центр ловушки. Этому событию соответствует резкий скачок сигнала КвФД, отслеживающего положение микросферы, к уровню нулевой линии сигнала. Амплитуда этого скачка дает возможность определить величину силы связи, пользуясь предварительно измеренными на основании специальных процедур калибровки значениями двух параметров: коэффициента чувствительности КвФД к смещению микросферы и коэффициента жесткости ловушки. В опыте, результаты которого иллюстрирует Фиг. 1, разрыв связи между эукариоцитом и микросферой произошел приблизительно через 4,1 сек после остановки пьезостолика на стадии подведения.
Измерение амплитуды скачков сигнала КвФД, калибровка прибора и вычисление, в конечном итоге величины силы отрыва микросферы производят с использованием программного обеспечения фирмы-производителя оптического пинцета. Для адекватной оценки амплитуды скачка сигнала КвФД производят также предварительное измерение, «нулевой» линии сигнала КвФД, которая имеет достаточно сложную форму в условиях эффекта тени клетки J-774.
На всех этапах постановки эксперимента, включая стадии подведения и отведения столика, важным моментом является выбраковка данных. Причинами исключения опытов из общего массива данных являются:
- необратимое прикрепление микросферы к поверхности клетки J-774 и (или) к филоподиям;
- попадание в оптическую ловушку посторонней частицы на стадии подведения клетки J-774 либо на стадии отведения до момента отрыва.
Пример 3. Количественная оценка распределения сил отрыва микросфер от поверхности клеток J-774
Совокупность имеющихся знаний о процессах и механизмах адгезии микрочастиц и биологических клеток J-774 на молекулярном уровне свидетельствует о большом разнообразии типов и характерных величин силовых взаимодействий, определяющих эти процессы. По этой причине экспериментальную информацию, получаемую методами молекулярной силовой спектроскопии процессов связывания, целесообразно представлять в виде гистограмм распределения регистрируемых значений сил разрыва связей. Такой подход позволяет естественным образом вычленять проявления различных типов связи, формирующих адгезивное взаимодействие конкретно исследуемых объектов. На Фиг. 2 представлена гистограмма распределения сил отрыва в серии опытов с использованием макрофагов мыши линии J-774 и полистироловых микросфер диаметром 1 мкм, сенсибилизированных препаратом ЛПС, выделенным из клеток Yersinia pseudotuberculosis, выращенных при температуре 10°С. Зарегистрированная гистограмма имеет заметно выраженную бимодальность формы. Это, по-видимому, свидетельствует о наличии двух типов взаимодействия либо двух групп молекулярных структур, обусловливающих связь сенсибилизированных микросфер с макрофагами мыши линии J-774.
Таким образом, предлагаемое изобретение позволяет воспроизводимо оценивать методами молекулярной силовой спектроскопии силу связи между адгезированным эукариоцитом и сенсибилизированной микросферой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ СИЛЫ МЕЖМОЛЕКУЛЯРНЫХ ВЗАИМОДЕЙСТВИЙ В МОДЕЛЬНОЙ СИСТЕМЕ "ФУНКЦИОНАЛИЗИРОВАННАЯ ПОЛИСТИРОЛОВАЯ МИКРОСФЕРА-ФУНКЦИОНАЛИЗИРОВАННОЕ СТЕКЛО" МЕТОДОМ ОПТИЧЕСКОЙ ЛОВУШКИ | 2017 |
|
RU2660556C1 |
| ИЗМЕРЕНИЕ И ИСПОЛЬЗОВАНИЕ МЕЖМОЛЕКУЛЯРНОГО ВЗАИМОДЕЙСТВИЯ | 2000 |
|
RU2223500C2 |
| Способ создания оптического пинцета с конфигурируемым массивом вихревых лазерных пучков | 2023 |
|
RU2807969C1 |
| Способ введения диэлектрического микроконтейнера в клетку млекопитающего с использованием фемто-пикосекундных импульсов лазерного излучения | 2015 |
|
RU2614269C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АДГЕЗИИ STAPHYLOCOCCUS SPP. К ГЕМОПРОТЕИНАМ | 2008 |
|
RU2393229C1 |
| СПОСОБ ИММУНОФЛУОРЕСЦЕНТНОГО ОПРЕДЕЛЕНИЯ ПРОТЕКТИВНОГО АНТИГЕНА ВОЗБУДИТЕЛЯ СИБИРСКОЙ ЯЗВЫ | 2011 |
|
RU2478970C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ МАНИПУЛЯЦИИ ОБЪЕКТАМИ | 2001 |
|
RU2243630C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ КЛЕТОК-ПРЕДШЕСТВЕННИЦ ЭПИТЕЛИОИДНЫХ КЛЕТОК | 1997 |
|
RU2132063C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АДГЕЗИИ Staphylococcus spp. К ФИБРОНЕКТИНУ И ФИБРИНОГЕНУ | 2012 |
|
RU2490329C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УПРУГОСТИ КЛЕТОК КРОВИ | 2011 |
|
RU2466401C1 |
Изобретение относится к области биохимии. Предложен способ количественной оценки силы связывания сенсибилизированной полистироловой микросферы с эукариоцитом линии J-774. Способ включает подготовку культуры адгезированных эукариоцитов J-774, калибровку оптического пинцета, подведение пьезостоликом клетки J-774 к удерживаемой микросфере до их соприкосновения, отведение пьезостолика с автоматической регистрацией динамики взаимодействия между клеткой и микросферой. Прецизионное подведение клетки к микросфере проводится в ручном режиме с пошаговым подведением. Момент контакта микрообъектов устанавливается по наличию на непрерывно регистрируемой силовой кривой изменений, соответствующих показателям достоверности касания. Показатели достоверности касания включают появление на хронограмме сигнала трех инвертированных ступеней повышенной амплитуды в ответ на три последовательных шага столика, а также предшествующее этим признакам изменение амплитуды броуновских смещений микросферы. Величина силы отрыва микросферы от клетки вычисляется автоматически по амплитуде характерного скачка на силовой кривой. Изобретение обеспечивает улучшение контроля над количественной оценкой силы связывания сенсибилизированных микросфер и фиксированных макрофагов, повышение точности изменения параметров, характеризующих упомянутую силу. 2 ил., 3 пр.
Способ количественной оценки силы связывания сенсибилизированной полистироловой микросферы с эукариоцитом линии J-774 на основе метода оптической ловушки, включающий подготовку культуры адгезированных эукариоцитов J-774, калибровку оптического пинцета, подведение пьезостоликом клетки J-774 к удерживаемой сфокусированным лучом лазера полистироловой микросфере до их соприкосновения, отведение пьезостолика с автоматической регистрацией динамики исследуемого взаимодействия между вышеуказанной клеткой и полистироловой микросферой, отличающийся тем, что прецизионное подведение клетки к полистироловой микросфере с расстояния 3-4 мкм проводится в ручном режиме, включающем пошаговое подведение пьезостоликом клетки к полистироловой микросфере с шагом 50 нм, производя 2-3 шага в секунду, направление подведения и отведения пьезостолика - горизонтальное, скорость автоматического отведения пьезостолика - 100 нм в секунду, а частота оцифровки сигнала фотодетектора - 1000 Гц, момент контакта микрообъектов с погрешностью не более 50 нм устанавливается по наличию на непрерывно регистрируемой силовой кривой изменений, соответствующих показателям достоверности касания, включающим появление на хронограмме сигнала трех инвертированных ступеней повышенной амплитуды в ответ на три последовательных шага столика, а также предшествующее этим признакам изменение амплитуды броуновских смещений полистироловой микросферы, а величина силы отрыва полистироловой микросферы от клетки вычисляется автоматически по амплитуде характерного скачка на силовой кривой, обусловленного изменением положения полистироловой микросферы в оптической ловушке в результате отрыва.
| Sieben C., Kappel C | |||
| AND ET AL., Influenza virus binds its host cell using multiple dynamic interactions // PNAS, 21.08.2012, Vol | |||
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
| Wei M., Hua K., Hsu J | |||
| AND ET AL., The interaction of lipopolysaccharide-coated polystyrene particle with membrane receptor proteins on macrophage measured by optical tweezers // Optics | |||

