Изобретение относится к области автоматики и вычислительной техники и может быть применено при автоматизации объектов управления в ракетно-космической области, в частности, для управления в реальном времени технологическим оборудованием, например газораспределительным комплексом, при испытаниях и заправке двигательных установок.
Известна автоматизированная система управления подготовкой и пуском ракет-носителей (см. патент на изобретение РФ №2450306, М. кл. G05B 19/00, опубл. 10.05.2012 г.), которая содержит четыре автоматизированных рабочих места операторов (АРМ), в которое входят последовательно соединенные устройство ввода/вывода, операционная система и устройство отображения, два устройства связи с волоконно-оптической линией передачи информации, пятнадцать блоков определения функциональной готовности, семь устройств связи с объектом - технологическим оборудованием, одиннадцать устройств запуска исполнительных элементов, восемь блоков ввода-вывода дискретной информации, пять устройств управления и связи, пульт подкомплекса контроля аппаратно-программных средств, два сетевых системных коммутатора, четыре устройства распределения первичного электропитания, устройство дистанционного управления первичным электропитанием выносного командного пункта, устройство дистанционного управления первичным электропитанием стартового сооружения, четыре устройства распределения вторичного электропитания для различных моделей семейства ракет-носителей, четыре устройства запитки исполнительных элементов и систем ракеты-носителя, пять программных имитаторов, четыре устройства бесперебойного электропитания, соединенных соответствующей совокупностью связей.
Данная система является сложным изделием, которое целесообразно применять в опасных условиях эксплуатации, в основном, в ракетно-космической области и характеризуется большим количеством пространственно разнесенных блоков и устройств, что снижает надежность и требует большой трудоемкости при техническом обслуживании, в частности, ее трудно использовать для заключительных этапов подготовки и пуска ракеты космического назначения (РКН), разгонного блока (РБ) и космической головной части (КГЧ) в случае, когда этапы технологических процессов подготовки и испытаний указанных узлов перекрываются во времени.
Кроме того, данная система требует наличия двух систем обслуживания - подготовки к работе на технических и стартовых комплексах, что снижает надежность и требует сложного управления и обслуживания.
Известна автоматизированная система управления подготовкой и пуском ракет-носителей (см. патент на изобретение РФ №2491599, М. кл. G05B 19/409, F41F 3/04, опубл. 27.08.2013 г.), которая содержит четыре автоматизированных рабочих места операторов (АРМ), пульт подкомплекса контроля аппаратно-программных средств, передвижной пульт заказчика, пять устройств управления и связи, два устройства связи с волоконно-оптической линией передачи информации, два сетевых коммутатора, три устройства распределения первичного электропитания, устройство дистанционного управления первичным электропитанием, устройство дистанционного управления первичным электропитанием стартового сооружения, два устройства распределения вторичного электропитания (УРВЭП), два устройства запитки исполнительных элементов и систем, три устройства бесперебойного электропитания для УРПЭП, восемь устройств запуска исполнительных элементов, девять блоков определения функциональной готовности, семь блоков ввода/вывода дискретной информации, распределитель питания аппаратуры комплекса единого времени, устройство обработки временной информации, блок ввода-вывода аналоговой и дискретной информации, два устройства искробезопасного ввода аналоговой информации, семь устройств искробезопасного ввода дискретной информации, устройство искробезопасного ввода дискретных датчиков "контакта подъема", блок обработки дискретных сигналов, два устройства питания пироэлементов, при этом в АРМ входят последовательно соединенные устройство ввода/вывода, операционная система и устройство отображения, причем устройство ввода/вывода связано с устройствами управления и связи, устройствами связи с волоконно-оптической линией передачи информации и сетевыми коммутаторами, которые, в свою очередь, соединены с блоком ввода/вывода аналоговой и дискретной информации, блоком определения функциональной готовности, блоками ввода/вывода дискретной информации, устройствами запуска исполнительных элементов и с пультом подкомплекса контроля аппаратно-программных средств, связанным также с операционной комплексом АРМ, при этом исполнительные элементы соединены с устройством запуска исполнительных элементов, а питание блоков и устройств данной комплекса обеспечивается упомянутыми блоками первичного и вторичного электропитания.
Однако, как и предыдущий аналог, данная система функционирует на основе жесткой логики дискретных устройств и не способна обслуживать ракетные комплексы, относящиеся к другим классам. Наличие большого числа активных блоков измерения, управления и контроля требует наличия двух систем обслуживания - подготовки к работе на технических и стартовых комплексах, что требует сложного управления и обслуживания, и в результате не обладает достаточной надежностью работы.
Оба рассмотренные комплекса могут работать с одним семейством ракет.
За прототип выбрана система по патенту №2450306.
Техническим результатом предлагаемого изобретения является повышение автоматизации, уменьшение времени и повышение качества управления и обслуживания, а также повышение надежности подготовки двигательных установок ракеты носителя и расширение номенклатуры типов обслуживаемых ракет.
При этом под повышением автоматизации понимается возможность в автоматическом режиме выполнять отдельные технологические операции, заданные алгоритмами этих операций, по выбору оператора АРМ в соответствии с технологическим графиком работ, а также возможность последовательного автоматического выполнения технологических операций в соответствии с алгоритмами управления технологическим процессом испытаний, а в ручном режиме осуществлять индивидуальное управление отдельными, выбранными операторами, исполнительными элементами по алгоритмам, учитывающим необходимые блокировки, обеспечивающие безопасность работ.
Предлагаемый информационно управляющий комплекс (ИУК АСУ) предназначен для проведения всех видов испытаний двигательных установок ракеты-носителя (РКН) на техническом и стартовом комплексах, включая контроль и управление заправкой РКН, а также обеспечение изделия необходимыми сжатыми газами с требуемыми параметрами при всех видах испытаний на ТК и СК /см. Основы проектирования ракетно-космических комплексов/ Методология обоснования облика комплексов. Г.П. Бирюков и др. - СПб.: АЛФАВИТ, 2002. - 320 с., Справочник по эксплуатации космических средств /Л.Т. Баранов и др./ под общ. ред. Проф. А.П. Полякова. - 2-е изд., пер. и доп. - СПб.: ВКА им А.Ф. Можайского, 2006. - 758 с., Технологические объекты наземной инфраструктуры ракетно-космической техники /Ю.Л. Арзуманов и др.; под общ. Ред. Чл. - корр. РАН И.В. Бармина. В двух кн. - М.: Полиграфикс, 2006. - Кн. 1 - 420 с., Кн. 2-376 с./.
ИУК АСУ взаимодействует с объектом управления ОУ, РКН, с помощью газораспределительного модуля, предназначенного для обеспечения подачи сжатого газа с заданными характеристиками на борт РКН при проведении различных испытаний на ТК. А при работе на стартовом комплексе ИУК АСУ взаимодействует с объектом управления, РКН, с помощью наземного технологического оборудования (ТО), предназначенного для подключения пневмокоммуникаций и средств измерения к ОУ и состоящего из пневмоколодок, приспособлений, гибких трубопроводов и переходников / см. Справочник по эксплуатации космических средств /Л.Т. Баранов и др./ под общ. ред. Проф. А.П. Полякова. - 2-е изд., пер. и доп. - СПб.: ВКА им А.Ф. Можайского, 2006. - 758 с., Технологические объекты наземной инфраструктуры ракетно-космической техники /Ю.Л. Арзуманов и др.; под общ. Ред. Чл. - корр. РАН И.В. Бармина. В двух кн. - М.: Полиграфикс, 2006. - Кн. 1-420 с., Кн. 2-376 с./.
Достижение указанного технического результата обеспечивается в предлагаемом информационно-управляющем комплексе автоматизированной системы управления (ИУК АСУ) подготовкой двигательных установок (ПДУ) и технологическим оборудованием (ТО) ракет космического назначения (РКН) на техническом (ТК) и стартовом комплексах (СК), содержащем, автоматизированные рабочие места (АРМ) операторов, число которых соответствует числу технических подразделений, осуществляющих управление этапами технологического графика (ТГ) подготовки и пуска РКН, блок управления, связи и коммутации (БУСК), содержащий устройства коммутации локальной вычислительной сети (КЛВС), шлюз связи с комплексом единого времени (ШСЕВ), подключенные к первой двунаправленной шине передачи данных, блоки ввода/вывода измерительной информации и сигналов управления (БВВИ), число которых соответствует числу подсистем РКН, обслуживаемых комплексом ИУК АСУ, причем каждый из БВВИ содержит блок ввода дискретных данных (БДД), аналого-цифровой и цифро-аналоговый преобразователи (АЦП и ЦАП) и формирователь сигналов управления (ФСУ), связанных друг с другом второй двунаправленной шиной передачи данных, а также устройство первичного электропитания (УПЭ), и блоки управляемого вторичного электропитания (БУВЭП) по числу блоков БВВИ, отличающемся тем, что введены табло коллективного пользования (ТКП), блоки кабельных соединений (БКС), блоки соединений датчиков и исполнительных механизмов (БСД), причем число БКС и БСД соответствует числу участвующих в подготовке и пуске подсистем РКН с учетом технического и стартового комплексов, при этом БУСК дополнительно содержит базу данных технологической информации (БДТИ), систему управления информационным обменом (СУИО), устройство управления АРМ пользователя и технологическим процессом (УУ АРМ/ТП), связанные с КЛВС и с ШСЕВ первой двунаправленной шиной передачи данных, третьей двунаправленной шиной БУСК связан с ТКП и блоками БВВИ, причем каждый БВВИ дополнительно содержит микроконтроллер блока (МКБ), драйверы управления передачей данных (ДУПД) по двунаправленным шинам и контроллер целостности цепей управления (КЦУ), при этом соответствующие входы/выходы блоков АЦП, ЦАП, КЦУ, ФСУ и БДД являются дискретными входами и аналоговыми входами/выходами БВВИ, а четвертой двунаправленной шиной БУСК связан с блоками вторичного управляемого электропитания БУВЭП, выходы которых служат для подачи электропитания на БВВИ и БКС, при этом соответствующие выходы УПЭ соединены параллельно с соответствующими входами АРМ, ТКП, БУСК и БУВЭП, а сигнальные и управляющие входы и выходы каждого из блоков БВВИ соединены с соответствующими выходами и входами соответствующего БКС, каждый из которых, в свою очередь, связан сигнальными проводами и кабелями с исполнительными механизмами РКН и соответствующим БСД, выходные сигнальные провода и кабели которых связаны с соответствующими датчиками подсистем РКН.
Введение в БУСК, изначально предназначенного для связи со смежными системами и управления трафиком в ИУК АСУ, базы данных технологической информации (БДТИ) для архивирования и использования технологических данных комплекса ИУК АСУ, системы управления информационным обменом (СУИО) обеспечивающего обмен информацией между подсистемами БУСК и внешними системами, устройства управления АРМ пользователя и технологическим процессом (УУАРМ/ТП) позволяют реализовать дистанционное, автоматизированное управление технологическим оборудованием и подготовкой двигательных установок в полном соответствии с технологическим графиком подготовки и пуска, независимо от типа РКН. Модуль УУАРМ /ТП в БУСК представляет собой троированные контроллеры высокой производительности, содержащие технологическое программное обеспечение комплекса ИУК АСУ, которое обеспечивает автоматизацию работы оператора АРМ, отвечает за алгоритмы функционирования технологического оборудования, регулирование процессов, синхронизацию и взаимодействие технологического оборудования. При смене типа РКН меняется программа технологического процесса подготовки и пуска и технологический график. Аппаратное и программное обеспечение ИУК обеспечивает единое время для всех задач ИУК АСУ с помощью шлюза единого времени ШСЕВ. Кроме того, введение указанных блоков обеспечивает визуализацию процесса управления на основе 2 и 3-Д графических мнемосхем отдельных элементов и подсистем РКН, отражающих техническое состояние двигательных установок (ДУ) и технологического оборудования (ТО) в процессе подготовки к пуску РКН в реальном масштабе времени. Таким образом, обеспечивается автоматизация процесса управления, сокращение времени и повышение качества управления и обслуживания, а также повышение надежности подготовки двигательных установок ракеты носителя.
Введение в БВВИ блоков МКБ, ДУПД и КЦУ, а также наличие у БВВИ дискретных входов и аналоговых входов/выходов (входы/выходы АЦП, ЦАП, КЦУ, ФСУ и БДД) обеспечивает универсальность ИУК АСУ по отношению к виду и конкретному исполнению датчиков и исполнительных механизмов. Блок контроля цепей управления КЦУ обеспечивает своевременное обнаружение повреждений цепей управления, повышение надежности и исключение ложных срабатываний.
Введение блоков БКС и БСД, предназначенных для коммутации сигналов управления исполнительными элементами на техническом и механизмами технологического оборудования на стартовом комплексах, а также согласования сигналов датчиков на ТК и СК, обеспечивает независимость управления подготовкой двигательных установок и технологическим оборудованием ИУК АСУ от типа двигательных установок РКН, поскольку при смене типа РКН изменяется только конфигурация подключения сигнальных проводов и кабелей на стартовом и техническом комплексах и программное обеспечение проведения технологических операций.
Введение блока табло коллективного пользования ТКП обеспечивает операторов и руководителя ИУК АС ПДУ информацией коллективного пользования, что способствует повышению надежности и оперативности принятия решений, обеспечивая повышение автоматизации, уменьшение времени, повышение качества управления и подготовки, а также повышение надежности управления технологическим оборудованием, подготовки двигательных установок ракеты носителя на техническом комплексе (ТК) и стартовом комплексе (СК) и расширение номенклатуры типов обслуживаемых ракет.
Причем повышение надежности достигается также тем, что при включении первичного источника питания УПЭ в начальный момент времени подается питающее напряжение на БУСК, БВВИ и БУВЭП, а подача питающего напряжения на БКС блокируется. После завершения переходных процессов УУАРМ/ТП, проведения самодиагностики и анализа исходных данных, автоматически устанавливаются требуемые по технологическому графику режимы подачи управляющих сигналов и команд, и только после этого разрешают подачу питающих напряжений со стороны БУВЭП на БКС для пропуска сигналов датчиков со стороны БСД. После анализа сигналов и оценки состояния ОУ с помощью БУВЭП и БКС разрешается подача команд в сторону исполнительных механизмов или технологического оборудования ОУ (РКН).
В результате отпадает необходимость в сложной системе, содержащей устройства управления и обслуживания датчиков и исполнительных элементов технологических подсистем подготовки и пуска, а также в сложной системе эксплуатации, и тем самым повышается надежность подготовки двигательных установок ракеты носителя и уменьшение времени ее подготовки к старту.
А расширение класса обслуживаемых ракет достигается в результате того, что при обслуживании различных классов ракет изменяемой частью в ИУК ИУК АСУ является БСД и программа управления технологическим графиком, в которых изменяются только точки соединения датчиков и исполнительных механизмов и программа обслуживания технологического графика соответственно.
Предлагаемый информационно-управляющий комплекс автоматизированной системы управления (ИУК АСУ) подготовкой двигательных установок (ПДУ) и технологическим оборудованием (ТО) ракет космического назначения (РКН) на техническом и стартовом комплексах (ТК и СК) поясняется чертежами, где на фиг. 1 приведена его структурная схема, на фиг. 2 показан общий алгоритм работы ИУК АСУ, на фиг. 3 показана блок схема программы алгоритма проверки пневматического мембранного реле одного из блоков РКН, на фиг. 4 показаны примеры мнемосхем для управления ТО и ДУ на техническом и стартовом комплексах (мнемосхема двигательных установок одного из блоков РН Союз-2 на ТК (4а), мнемосхема системы термостатирования воздухом низкого давления на СК, мнемосхема системы заправки жидким кислородом на СК (4б и 4в)), на фиг. 5 представлена схема взаимодействия блоков ИУК АСУ при прохождении команд управления, на фиг. 6 представлена структурная схема АРМ. На фиг. 7 представлена функциональная схема БВВИ 6, на фиг. 8 представлена структура ЛВС Ethernet, на фиг. 9 представлена логические сети нижнего и верхнего уровня ЛВС. На фиг. 10. представлена организация информационного взаимодействия сети нижнего уровня, на фиг. 11 представлена схема прохождения информации в БВВИ 6, на фиг. 12 представлен блок микропроцессора для УУАРМ/ТП 5.3, на фиг. 13 представлена схема мажоритирования, на фиг. 14 представлена схема выходного каскада ФСУ 6.5, на фиг. 15 представлена плата ФСУ, на фиг. 16 представлена схема выходного каскада БДД 6.7, на фиг. 17 представлена плата БДД 6.7, на фиг. 18 представлена схема КЦУ 6.6, на фиг. 19 представлена плата АЦП 6.3, на фиг. 20 представлена структурная схема ПО ИУК АСУ, на фиг. 21 представлена структурная схема ПО АРМ 4, на фиг. 22 представлена структурная схема ПО УУАРМ/ТП 5.3, на фиг. 23 представлена структурная схема ПО БВВИ 6, на фиг. 24 представлена экранная форма интерфейса имитатора.
Согласно фиг. 1 предлагаемый ИУК АСУ содержит устройство 1 первичного электропитания (УПЭ), по меньшей мере, два блока 2 вторичного электропитания (БУВЭП), (в общем случае число блоков БУВЭП соответствует числу подсистем РКН, обслуживаемых комплексом ИУК ИУК АСУ), табло 3 коллективного пользования (ТКП), автоматизированные рабочие места 4 (АРМ) операторов, число которых «п» соответствует числу технических подразделений, осуществляющих управление этапами технологического графика (ТГ) подготовки и пуска РКН, блок 5 управления, связи и коммутации (БУСК), содержащий, в свою очередь, базу 5.1 данных технологической информации (БДТИ), систему 5.2 управления обменом информацией (СУОИ), устройство 5.3 управления АРМ пользователя и технологическим процессом (УУАРМ/ТП), устройство 5.4 коммутации локальной вычислительной сети (КЛВС), шлюз 5.5 связи с комплексом единого времени (ШСЕВ), связанные между собой первой двунаправленной шиной передачи данных, по меньшей мере, два блока 6 ввода/вывода измерительной информации и сигналов управления (БВВИ) (в общем случае число БВВИ соответствует числу подсистем РКН, обслуживаемых комплексом ИУК ИУК АСУ), причем каждый из БВВИ содержит микроконтроллер 6.1 блока (МКБ), не менее двух драйверов 6.2 управления передачей данных (ДУПД) по двунаправленным шинам, аналого-цифровой и цифро-аналоговый преобразователи 6.3 и 6.4 (АЦП и ЦАП), формирователь 6.5 сигналов управления (ФСУ), контроллер 6.6 целостности цепей управления (КЦУ), блок 6.7 ввода/вывода дискретных данных (БДД), при этом соответствующие входы/выходы блоков АЦП 6.3, ЦАП 6.4, КЦУ 6.6, ФСУ 6.5 и БДД 6.7 являются дискретными входами/выходами и аналоговыми входами/выходами БВВИ и связаны между собой второй двунаправленной шиной передачи данных, с которой также связаны блоки 6.1 и 6.2, блоки 7 кабельных соединений (БКС), блоки 8 соединений (БСД) датчиков 9 и исполнительных механизмов или технологического оборудования 10, причем число БКС и БСД соответствует числу участвующих в подготовке и пуске подсистем ОУ (РКН) 11 с учетом технического и стартового комплексов, при этом сигнальные и управляющие входы и выходы каждого из блоков БВВИ соединены с соответствующими выходами и входами соответствующего БКС, каждый из которых, в свою очередь, связан двунаправлено с соответствующим БСД, а сигнальными проводами и кабелями - с исполнительными механизмами или технологическим оборудованием 10 ОУ (РКН) 11, причем выходные сигнальные провода и кабели БСД связаны с соответствующими датчиками 9 подсистем ОУ (РКН) 11.
Предлагаемый информационно-управляющий комплекс работает следующим образом (согласно фиг. 1 и фиг. 2). При включении узла первичного электропитания УПЭ 1 первичное напряжение 220 вольт переменного тока подается на блоки БУВЭП 2, БУСК 5, БВВИ 6, АРМ 4 и ТКП 3. Устройство управления УУАРМ/ТП 5.3 выводит на экраны мониторов АРМ 4 текущее состояние процесса управления в виде 3-Д графических мнемосхем, на которых в виде 2-Д проекций и цветом отражено состояние исполнительных механизмов, датчиков и технологического оборудования с привязкой к технологическому графику, который отображается в виде отдельного объекта. При этом УУАРМ/ТП 5.3 с помощью БУВЭП 2 блокирует подачу управляющих сигналов и команд, питающих напряжений через БКС 7 и БСД 8 на и от объекта управления 11 на техническом и стартовом комплексах. После анализа, по технологическому графику и мнемосхеме, технического состояния объекта управления ОУ (РКН) 11 и принятия управляющего решения оператор, с помощью БУВЭП 2, разрешает подачу управляющих питающих напряжений на БКС 7, разрешая тем самым прохождение сигналов датчиков через БСД 8 от ОУ 11. После анализа технического состояния ОУ, оператором в ручном режиме управления или автоматически производится разблокировка прохождения сигналов управления от УУ АРМ/ТП 5.3, через БВВИ 6 и БКС 7 на исполнительные механизмы или технологическое оборудование 10 объекта управления ОУ 11 на техническом и стартовом комплексах соответственно. Далее оператор, в соответствии с технологическим графиком, запускает на мнемосхеме (фиг. 4) цикл управления технологическим оборудованием для подготовки и проведения проверок, испытаний и анализа готовности к заправке и старту двигательных установок (фиг. 3) РКН. В начале цикла работ по проведению испытаний на техническом комплексе ТК, с помощью УУАРМ/ТП 5.3, БВВИ 6, БКС 7, БСД 8 и датчиков 9 осуществляется проверка наличия и установка конкретных, определенных текущей задачей блокировок безопасности на исполнительных механизмах 10 (газораспределительном модуле ТК). После проверки соответствия блокировок текущей задаче испытаний, осуществляется, в соответствии с инструкцией по эксплуатации, ввод в БДТИ 5.1 технологических уставок (допусков на значения величин) и инициализируется начало параллельной проверки и испытаний нескольких узлов РКН. Для чего с помощью УУАРМ/ТП 5.3 по соответствующей программе (пример на фиг. 3) осуществляется подача управляющих воздействий, пневматических и электрических, на исполнительные механизмы газораспределительного модуля 10. Далее по программе проверки осуществляются с помощью БВВИ 6 и БКС 7 переключения исполнительных механизмов 10 и контроль показаний датчиков 9 в соответствии с логическими условиями проверки. Ход испытаний и результаты отображаются на мнемосхеме (фиг. 4). Далее производится снятие управляющих воздействий и переключение исполнительных механизмов 10 в исходное (до проверки) состояние. Аналогично реализуются следующие циклы проверки. После проведения всех требуемых по технологическому графику циклов проверок производится протоколирование результатов, их визуализация на мнемосхеме и передача сообщения о завершении проверки в АСУ верхнего уровня.
Работы по проведению технологических операций на СК (фиг. 2) проводятся в соответствии с правой ветвью алгоритма и характеризуются последовательностью действий представленной на фиг. 2, подобной алгоритму проверок и испытаний на ТК.
Таким образом, предлагаемый ИУК АСУ выполняет следующие функции:
- управления (блоки БУСК 5, БВВИ 6, БКС 7, БСД 8);
- отображения информации (АРМ 4, ТКП 3);
- документирования (БДТИ 5.2);
(вспомогательных) функций (УПЭ 1, БУВЭП 2, ТКПЗ, БДТИ 5.1, УУАРМ/ТП 5.3, АРМ 4, БВВИ 6, БКС 7, БСД 8).
Для этого производится решение основных задач:
- управление выдачей в исполнительные механизмы 10 (пневмогидравлическую систему (ПГС) и газораспределительный модуль (ГРМ)) управляющих воздействий (сжатых газов) с необходимыми параметрами как в автоматическом режиме, при отработке комплексом циклограммы испытаний технологического графика, так и в дистанционно ручном от АРМ 4 пользователя (приоритет ручного режима);
- прием сигналов состояния (дискретных и аналоговых) для контроля прохождения операций проверки двигательных установок (ДУ) на техническом и стартовом комплексах ТК и СК соответственно;
- контроль соблюдения последовательности выполнения технологических операций, при проведении испытаний двигательных установок (ДУ) на ТК и СК (включая автономные испытания (АИ), комплексные испытания (КИ) при подготовке ДУ РКН 11);
- перевод исполнительных механизмов в безопасное для обслуживающего персонала и изделия состояние при возникновении условий или поступление команды на немедленный останов испытаний;
- учет и хранение результатов испытаний двигательных установок (ДУ) с возможностью оперативного доступа к ним операторов АРМ 4;
- формирование протоколов и графиков по результатам выполнения технологических операций подготовки ДУ РКН;
обеспечение оперативного доступа операторов АРМ 4 к информационно-справочной системе (ИСС) по ДУ РКН «Союз-2»;
- обеспечение оперативного доступа операторов АРМ 4 к нормативно-технической и эксплуатационной документации, хранящейся в электронном виде в информационно справочной системе (ИСС) ИУК;
- проведение технического диагностирования ИУК АСУ и линий связи при подготовке к работе и в процессе работы, обеспечение локализации места отказа с глубиной до элемента замены.
Рассмотрим прохождение сигнала от оператора АРМ 4 (фиг. 6) до исполнительного механизма 10 (ТК и СК РКН, см. фиг. 1).
Схема взаимодействия блоков ИУК АСУ при прохождении команд управления (структура канала управления) представлена на фиг. 5. На пульте АРМ 4 (см. фиг. 6) на технологической мнемосхеме комплекса (см. фиг. 4) оператор инициирует определенный процесс (закрытие клапана, начало операции, изменение положения задвижки, конец операции и т.п.). Действие оператора уже на уровне АРМ 4 проходит несколько уровней контроля: персонализация, квитирование, контроль безопасности операции по заданным критериям и др.
Далее команда оператора попадает в БУСК 5 и через СУОИ 5.1, затем на УУАРМ/ТП 5.3 (см. фиг. 5), где обрабатывается в рамках технологических алгоритмов (фиг. 3) со всем массивом данных БДТИ 5.1 о состоянии технологических и смежных систем на троированных (для повышения надежности) микропроцессорных сборках (контроллерах). Троированный контроллер - это трехканальный контроллер, каждый канал которого выполняет одни и те же алгоритмы, а результаты обработки данных сравниваются по мажоритарному принципу и окончательное решение о выдаче (снятии) управляющего воздействия принимается большинством. Далее команда поступает в троированный блок (стойку) БВВИ 6 (см. фиг. 7) на все три канала БВВИ 6 (см. фиг. 5). Блоками формирования сигналов управления (БФСУ 6.5) формируется выходной сигнал, который также мажоритируется и передается в БКС 7 и БСД 8 (фиг. 1). БКС 7 получает от стойки БУВЭП 2 напряжение питания постоянного тока. Блок БКС 7 проводит коммутацию сигналов, осуществляет питание выходные каскадов БФСУ 6.5 от БВВИ 6 постоянным напряжением от резервированных фидеров стойки БУВЭП 2 и передает их на технологическое оборудование объекта управления. Блок БУВЭП 2 осуществляют электроснабжение специальными токами технологического оборудования, контроль изоляции кабельной сети, аварийное отключение питания выходных сигналов ИУК АСУ по прямой (минуя вычислительные средства) команде оператора.
Обратное следование сигнала (дискретного или аналогового) происходит таким же образом, но в обратном направлении: от датчиков 9 и исполнительных механизмов 10 к БСД 8, БКС 7 к БВВИ 6 -блокам БДД 6.7 и ЦАП 6.4, от БВВИ 6 к БУСК 5 (СУОИ5.1, УУАРМ/ТП 5.3) от УУАРМ/ТП 5.3 через СУОИ 5.1 к АРМ 4. По пути сигналы подаются на три канала стойки БВВИ 6, сравниваются, мажоритируются, чтобы исключить ложные выбросы или ложные срабатывания, вызванные потенциальной неисправностью оборудования ИУК АСУ.
Основой сети передачи данных в ИУК АСУ является распределенная дублированная сеть Ethernet (см. фиг. 8). Дублирование сети необходимо для обеспечения резервирования. В случае выхода из строя одной из информационных сетей вторая полностью обеспечивает работоспособность ИУК АСУ.
В ИУК АСУ используется в качестве среды передачи данных медный кабель: устройства объединяются в сеть медными проводами (витая пара пятой категории). Пропускная способность таких каналов - до 1 Гбит/с, возможная длина кабеля - до 100 м. Все оборудование ИУК АСУ объединяется в единую дублированную Ethernet сеть (КЛВС 5.4), что позволяет осуществлять глобальный мониторинг ИУК АСУ в режиме реального времени.
Сеть передачи данных представляет собой совокупность узлов сети, соединенных информационными каналами. К аппаратному обеспечению информационных каналов относятся физические линии связи, сетевые адаптеры узлов сети и сетевые устройства (коммутаторы КЛВС 5.4). Под узлами сети понимаются вычислительные модули на промышленных контроллерах программно-технического комплекса ИУК АСУ. В частности, узлами сети являются БУСК 5, БВВИ 6, АРМ 4. Информационные каналы представляют собой совокупность физических линий связи (витая пара), сетевых коммутаторов КЛВС 5.4 и программных модулей поддержки сетевых протоколов СУОИ 5.2. Протокол Ethernet реализует физический и канальный уровень передачи данных. На транспортном уровне передачи данных используются протоколы TCP/IP, UDP, IPX. На прикладном уровне используется протокол OrionNet. Протокол OrionNet определяет содержимое пакетов данных, передаваемых по сети и правила их обработки, обеспечивает надежную передачу пакетов от источника к потребителю.
Сеть передачи данных ИУК АСУ логически разделена на 2 уровня: верхний уровень - уровень передачи информации между АРМ 4 и БУСК 5, нижний уровень - уровень взаимодействия БУСК 5 и БВВИ 6 (см. фиг. 9). Сети верхнего и нижнего уровня логически изолированы друг от друга, то есть БВВИ 6 и АРМ 4 не могут непосредственно обмениваться информацией. Сети верхнего и нижнего уровня резервируются как по линиям связи, так и по сетевым устройствам (коммутаторам КЛВС 5.4).
Программное обеспечение (ПО) информационных каналов включает системное ПО сетевых устройств и программную поддержку сетевых протоколов в узлах сети (составная часть системного ПО БВВИ 6, УУАРМ/ТП 5.3, СУОИ 5.1, АРМ 4).
На АРМ 4 - рабочем месте инженера-испытателя ИУК АСУ осуществляется сбор самодиагностики оборудования ИУК АСУ и диагностики технологического оборудования для формирования сигнала готовности ИУК АСУ. Оператор АРМ 4 с помощью мнемосхемы осуществляет управление питанием технологических систем, аварийное отключение в случае необходимости и обслуживание архива ИУК АСУ. На мониторы АРМ 4 выводится информация по графику работ на ТК и СК, обобщенная информация о состоянии подсистем и их текущее состояние, циклограмма работ и другая информация. Таким образом, АРМ 4 важный элемент отображения состояния и управления подсистемами РКН и технологическим оборудованием. На АРМ 4 концентрируется вся информация о технологическом оборудовании и операторы могут осуществлять управление в ручном, автоматическом и полуавтоматическом режимах.
Для передачи сигналов технологического оборудования и датчиков на БСД 7 и БКС 8 осуществляется коммутация сигналов от кабелей датчиков 9 и исполнительных элементов 10 технологических систем на кабели стоек БСД 8 и БКС 7 (см. фиг. 1).
Параллельно с этим, исполнительные элементы управления и диагностики (на БСД 7 и БКС 8, см. фиг. 1) запитываются по двум независимым фидерам от стойки БУВЭП 2. Фидер управления может отключаться в стойке БУВЭП 2 по аварийному сигналу от АРМ 4 оператора. Фидер диагностики в аварийной ситуации не отключается, позволяя системе ИУК АСУ следить за показателями технологически систем в любом случае.
При этом реализуется нормализация и гальваническая изоляция сигналов управления от датчиков 9 технологических систем.
При включении и выключении комплекса или отдельных его устройств исключена возможность выдачи управляющих воздействий на технологическое оборудование.
Аппаратное и программное обеспечение ИУК обеспечивает единое время для всех задач ИУК АСУ с помощью шлюза единого времени ШСЕВ 5.5.
При работе комплекса со средствами имитатора объекта управления исключена возможность выдачи управляющих воздействий на технологическое оборудование.
Организация и построение аппаратных и программных средств комплекса обеспечивают сохранение ее работоспособности при одиночном отказе или сбое в канале сети передачи данных и при одиночных отказах или сбоях в устройствах.
Выполнение блоков предлагаемого ИУК АСУ можно пояснить следующим образом. ИУК АСУ, по существу, представляет собой информационно-управляющую систему или программно - аппаратный комплекс мониторинга, анализа, оценки технического состояния и управления объектом - РКН. Поэтому основные узлы ИУК АСУ могут быть выполнены по технологии промышленных контроллеров, к периферийным выходам которых подключены цифровые или аналоговые цепи согласования с исполнительными устройствами и датчиками /см. Бунтов В.Д., Макаров СБ. Микропроцессорные системы Часть II. Микропроцессоры. Учебное пособие. - СПб.: Изд-во политехнического университета, 2008. - 199 с. (F2MC-16LX FAMILY 16-BIT MICROCONTROLLER МВ90590 SERIES HARDWARE MANUAL FUJITSU LIMITED)/.
Блоки устройства предлагается реализовывать по агрегатно-блочному принципу блок (модуль) - крейт (кассета) - стойка (пульт, шкаф) с широким применением унифицированных покупных устройств /Конструирование электронных устройств систем автоматизации и вычислительной техники С.Г. Григорьян, Феникс, 2007, ISBN: 978-5-222-11954-9/.
В качестве УПЭ 1 могут быть использованы щиты питания, которые производятся на предприятиях кооперации ЗАО «СКБ Орион» на основе продукции концерна ABB /www.enerq.ru/brand/abb; www.abb.ru/ProdactGuide - щиты первичного электропитания; www.emea-tdk-lambda.com - вторичные источники электропитания для монтажа в стойках/. Щиты строятся по модульному принципу с максимальным использованием типовых легко заменяемых элементов.
Стойка УЭП должна питаться от двух фидеров 220 В и должна быть включена всегда - должна находиться в режиме ожидания внешней команды для включения выходных фидеров, а через них - уже стоек УСО и потребителей низкого напряжения постоянного напряжения 27 В. Стойка УЭП должна быть способна сформировать 4 резервированных фидера питания постоянного напряжения 27 В мощностью до 1000 Вт каждый с возможностью регулирования в диапазоне от 24 до 32 В.
Блок управления электропитанием в БУВЭП 2 можно выполнить из трех контроллеров /F2MC-16LX FAMILY 16-BIT MICROCONTROLLER МВ90590 SERIES HARDWARE MANUAL FUJITSU LIMITED/, которые подключены с помощью двух коммутаторов Switch /www.inSAT.ru/Products/ к резервированной сети Ethernet системы АСП ДУ;
двух отдельных коммутаторов Swich /www.inSAT.ru/Products/;
микропроцессорного устройства контроля и управления электропитанием /F2MC-16LX FAMILY 16-BIT MICROCONTROLLER МВ90590 SERIES HARDWARE MANUAL FUJITSU LIMITED/ - предназначенного для сбора информации о состоянии питающей сети ~220 В, состоянии источников питания контроллеров, сигнализации о закрытом или открытом состоянии дверей, сигнализации о подключении кабелей, о состоянии оборудования, подключенного к сети ~220 В;
микропроцессорного устройства ввода и защиты электропитания ~220 В /F2MC-16LX FAMILY 16-BIT MICROCONTROLLER МВ90590 SERIES HARDWARE MANUAL FUJITSU LIMITED/ - предназначенного для ввода электропитания, защиты от перегрузок, формирования сигналов о состоянии входного электропитания ~220 В и узлов устройства;
устройства питания коммутаторов Switch /www.emea-tdk-lambda.com - вторичные источники электропитания для монтажа в стойках/;
устройства питания /www.emea-tdk-lambda.com - вторичные источники электропитания для монтажа в стойках/, питающего блоки в стойке УЭП;
микропроцессорного устройства контроля сопротивления изоляции - УКСИ. /F2MC-16LX FAMILY 16-BIT MICROCONTROLLER МВ90590 SERIES HARDWARE MANUAL FUJITSU LIMITED/.
В состав стойки управления электропитанием УЭП входят резервированные источники питания AC/DC /www.emea-tdk-lambda.com - вторичные источники электропитания для монтажа в стойках/, подключенные к двум фидерам ~220 В. Источники питания установлены в устройство, объединяющее их выходы. Кроме того, в устройстве собираются сигналы о состоянии этих источников, которые поступают в микропроцессорное устройство контроля и управления электропитанием.
После подачи команды оператора на включение питания, в стойку БУВЭП 2 поступает команда на включение источника питания для микропроцессорного устройства контроля и управления электропитанием-УКУП. После чего, по командам оператора или согласно технологического алгоритма (см. фиг. 3) включаются необходимые источники AC/DC в результате чего электропитание подается на потребители. Для обеспечения высокой надежности при управлении источниками питания стоек УЭП каждая команда управления формируется в трех независимых блоках управления стойки БУВЭП, мажоритируется, и результирующий сигнал поступает на управляющий включением вход блока AC/DC. Сигналы об исправности блока питания AC/DC и параметрическом контроле выходного напряжения по резервированным каналам, через управление стойки УЭП поступают для анализа в систему ИУК АСУ.
Управление каждым из резервированных блоков проводится независимо друг от друга. Информация о состоянии системы вентиляции, аналогично информации о состоянии источников питания, так же поступает в систему управления для анализа.
В качестве табло коллективного пользования можно использовать проекционное оборудование фирмы NEC /www.nec-display-solutions.com мониторы и табло коллективного пользования фирмы NEC/. Комплект АРМ (см. фиг. 4) состоит из стандартных устройств промышленных контроллеров и их аксессуаров /http://ipc-gridex.ru Многофункциональная вычислительная платформа. Промышленный контроллер/.
Комплект АРМ состоит из (см. фиг. 6):
двух контроллеров /http://adlinktech.com/prodacts/ETX, www.eltech.ru /каталог/ - микропроцессоры (контроллеры)/;
необходимого для конкретного пульта количества мониторов /www.nec-display-solutions.com мониторы и табло коллективного пользования фирмы NEC/ (обычно мониторов три штуки, но для некоторых систем этого недостаточно и число мониторов может быть увеличено до 6 штук);
источников бесперебойного питания /www.emea-tdk-lambda.com - вторичные источники электропитания для монтажа в стойках/ (при необходимости);
двух клавиатур и двух манипуляторов типа «мышь»;
двух коммутаторов Ethernet /www.inSAT.ru/Products/.
Мониторы АРМ 4 и ТКП 3 - стандартные средства отображения, например, как в /www.nec-display-solutions.com мониторы и табло коллективного пользования фирмы NEC/.
Все составные части комплекта АРМ резервируют друг друга (см. фиг. 6.), что обеспечивает необходимый уровень безопасности при функционировании комплекта АРМ.
Блок БУСК 5 конструктивно может быть выполнен в виде двух стоек /Конструирование электронных устройств систем автоматизации и вычислительной техники С.Г. Григорьян, Феникс, 2007, ISBN: 978-5-222-11954-9/ из промышленных комплектующих и аксессуаров /Бунтов В.Д., Макаров СБ. Микропроцессорные системы Часть II. Микропроцессоры. Учебное пособие. - СПб.: Изд-во поли- технического университета, 2008. - 199 с. (F2MC-16LX FAMILY 16-BIT MICROCONTROLLER МВ90590 SERIES HARDWARE MANUAL FUJITSU LIMITED); Основы конструирования корпоративных сетей Cisco: Учебное пособие, А.Е. Ермаков, УМЦ ЖДТ (Маршрут), 2013, 248 с; М. Кульгин, Компьютерные сети, Практика построения. Для профессионалов.- СПб.: ПИТЕР, 2-е изд. - 462 с.: илл ISBN: 5-94723-563-3/.
Информационный обмен между технологическим оборудованием и смежными системами может быть организован при помощи сети Ethernet, интерфейсов RS-485, RS-422, RS-232 или иных в зависимости от протоколов согласования.
Все основные узлы стойки (база данных - архив, контроллер управления и смежных систем, коммутаторы сети Ethernet и шлюз системы единого времени) дублированы.
Архив, для хранения данных может быть организован по принципу RAID-массива.
Питание стойки может осуществляться переменным напряжением 220 В по резервированному каналу. Внутри стойки из двух фидеров питания формируется один при помощи устройства ввода резерва. Данное устройство позволяет переключаться с одного фидера на второй (в случае отказа первого фидера) без перебоев.
В состав стойки, при необходимости, могут быть включены источники бесперебойного питания.
УУАРМ/ТП 5.3, далее УУ, построено на промышленных контроллерах /Бунтов В.Д., Макаров С.Б. Микропроцессорные системы Часть II. Микропроцессоры. Учебное пособие. - СПб.: Изд-во политехнического университета, 2008. - 199 с. (F2MC-16LX FAMILY 16-BIT MICROCONTROLLER МВ90590 SERIES HARDWARE MANUAL FUJITSU LIMITED)/.
Модуль УУ обменивается с внешними устройствами информацией по сети Ethernet через два Ethernet-коммутатора (Ethernet-Switch) /www.inSAT.ru/Products/). Каждый контроллер стойки связан с обоими коммутаторами. Всего три контроллера каналов обработки информации. Программное обеспечение контроллеров канала (/http://ipc-gridex.ru Многофункциональная вычислительная платформа. Промышленный контроллер/) содержит в себе технологические алгоритмы, по которым осуществляется управление внешними устройствами.
Блок контроллера можно реализовать на базе платы-носителя разработки ЗАО «СКБ Орион» и модуля ETX-LX в сборе (см. фиг. 12). Модуль ETX-LX с процессором AMD LX800 500 MHz устанавливается в качестве мезонинного на плату-носитель. Плата-носитель имеет два встроенных изолированных интерфейса CAN и два порта Ethernet 10/100Base-T. Блок контроллера может быть выполнен в конструктиве «Евромеханика» /Конструирование электронных устройств систем автоматизации и вычислительной техники С.Г. Григорьян, Феникс, 2007, ISBN: 978-5-222-11954-9/.
Стойка БВВИ имеет трехканальную структуру для реализации принципа безотказной и безошибочной работы.
В стойке БВВИ имеется три независимых блока процессорного модуля (МП 1) /F2MC-16LX FAMILY 16-BIT MICROCONTROLLER МВ90590 SERIES HARDWARE MANUAL FUJITSU LIMITED/. Каждый из блоков МП 1 взаимодействует с внешними устройствами верхнего (технологического) уровня по двум сетям Ethernet, а также обменивается информацией с внутренними устройствами стойки по двум дублирующим друг друга интерфейсам CAN v.2.0. Схема информационного взаимодействия блоков МП 1 и других блоков стойки БВВИ представлена на фиг. 11.
Выходные сигналы стойки БВВИ формируются по мажоритарной схеме (см. фиг. 13). В формировании каждого выходного дискретного сигнала участвуют три блока дискретного вывода, каждый из которых управляется своим блоком МП 1 по двум линиям CAN. Для дискретного вывода информации задействованы блоки различных исполнений, отличающихся максимальными значениями коммутируемых токов, их количество зависит от конкретного исполнения стойки БВВИ.
Контроль целостности цепей управления осуществляется блоком контроля цепей управления (КЦУ 6.6), устанавливаемым с каждой группой из трех блоков ФСУ 6.5. В отличие от блоков ФСУ 6.5, блок КЦУ 6.6 связывается с двумя из трех блоков МП 1 стойки БВВИ по одной линии CAN с каждым процессорным модулем.
Каждый входной сигнал стойки БВВИ принимается тремя блоками дискретного ввода. Каждый из блоков передает данные о входных дискретных сигналах в блок МП 1 своего канала по двум линиям CAN. Для дискретного ввода информации задействованы блоки БДД 6.7, их количество зависит от конкретного исполнения стойки БВВИ.
Блок МП 1 (фиг. 12) состоит из платы-носителя разработки ЗАО «СКБ Орион» и модуля ETX-LX в сборе (www.rtsoft.ru/prodact/detail/.php).
Блоки МП 1 устанавливаются в секцию стойки БВВИ.
Питание стойки БВВИ осуществляется постоянным напряжением +27 В по резервированному каналу таким образом, что имеется возможность местного включения и отключения как всей стойки, так и посекционно.
Блоки АЦП 6.3, КЦУ 6.6, БДД 6.7, ФСУ 6.5 выполнены в конструктиве «Евромеханика» /Конструирование электронных устройств систем автоматизации и вычислительной техники С.Г. Григорьян, Феникс, 2007, ISBN: 978-5-222-11954-9/. Блоки выполнены на многослойных печатных платах. Ввод, вывод внешних сигналов блока, последовательные каналы связи (CAN v. 2.0) и питание блока осуществляется через разъемы в задней части блока.
Блоки АЦП 6.3, КЦУ 6.6, БДД 6.7, ФСУ 6.5 различаются между собой периферийными устройствами ввода-вывода входных и выходных сигналов блоков. Их общая часть: источник питания /www.emea-tdk-lambda.com - вторичные источники электропитания для монтажа в стойках/, микроконтроллер блока /http://ipc-gridex.ru Многофункциональная вычислительная платформа. Промышленный контроллер/ и внешние интерфейсы.
Блок БВВИ подключен к внешним контроллерами по двум интерфейсным каналам CAN v. 2.0 /www.ixxat.com/usb-to-can-v2_en.html/, программирование и диагностика блока осуществляется по интерфейсу RS-232.
Микроконтроллер блока осуществляет связь с периферийными устройствами блока напрямую через свои порты ввода-вывода.
В качестве центрального обрабатывающего устройства блока выбран микроконтроллер MB90F591 фирмы Fujitsu /http://ipc-gridex.ru Многофункциональная вычислительная платформа. Промышленный контроллер; Бунтов В.Д., Макаров С.Б. Микропроцессорные системы Часть II. Микропроцессоры. Учебное пособие. - СПб.: Изд-во поли- технического университета, 2008. - 199 с. (F2MC-16LX FAMILY 16-BIT MICROCONTROLLER МВ90590 SERIES HARDWARE MANUAL FUJITSU LIMITED)/ (см. фиг. 12),. Этот контроллер в 100 контактном корпусе обладает развитой номенклатурой периферийных устройств и высокой вычислительной мощностью. Основными его характеристиками являются:
- быстрое 16 битное ядро (время выполнения инструкции 62,5 нс);
- обработка команд с использованием 4-байтной очереди;
- мощная система команд (340 инструкций);
- аппаратное умножение 16×16 и деление 32/16, 32-битный аккумулятор;
- большой объем Flash памяти программ на кристалле (384 Кбайт) программируемых в системе;
- ОЗУ данных 8 Кбайт на кристалле;
- 9 портов ввода-вывода;
- два полных CAN интерфейса версий 2.0 А и 2.0 В;
- три Full duplex UART на скорость до 2 Мбит;
- высокоскоростной последовательный порт ввода-вывода;
- встроенный быстрый АЦП (время преобразования 26,3 мкс для одного канала) 10 или восемь бит восьми разрядов;
- широкая номенклатура встроенных таймеров.
Встроенные функции контроллера, большое число портов ввода-вывода, высокая тактовая частота (16 МГц) позволяет нагрузить центральное обрабатывающее устройство блока дополнительными функциями, такими как, например, предварительная фильтрация аналогового сигнала.
Блок ФСУ 6.5 предназначен для использования в мажоритарной схеме формирования выходного сигнала. Блок ФСУ формирует непрерывный дублированный дискретный сигнал типа «сухой контакт».
Мажоритарная схема формируется из одноименных контактных групп поляризационных реле /www.RZA.ORG.ua, www.novoelectronica.ru/catalog/ трех блоков ФСУ 6.5 (см. фиг. 13).
Каждое реле, участвующее в мажоритарной сборке, имеет дублированные выходные контакты. В каждом из трех каналов сборки участвуют два различных реле. В результате, для того, чтобы питание было подано на исполнительный элемент, необходимо замыкание как минимум двух реле из трех. Диоды в каждом канале сборки необходимы для исключения взаимного влияния каналов при диагностике. Для увеличения надежности предохранитель поставлен в каждый канал сборки. С целью уменьшения количества внешних элементов сборки предохранители, диоды и цепи диагностики включаются в состав блока ФСУ 6.5.
Выходные сигналы блока ФСУ 6.5 формируются поляризованным реле FTR-B4CB4.5Z фирмы Fujitsu-Takamisawa /http://www.fujitsu.com/downloads/MICRO/fcai/relays/ftr-b4.pdf/.
Использование поляризованных реле позволяет подавать на обмотку реле управляющий импульс только в момент переключения, кроме того, поляризованное реле сохраняет свое состояние при выключенном питании блока. В примененном типе реле для размыкания выходных контактов необходимо пропустить через обмотку реле ток противоположного направления, чем при замыкании. Поэтому выходной каскад блока ФСУ 6.5 имеет вид, представленный на фиг. 14.
Микросхемы /Зарубежные микросхемы, транзисторы, диоды +SMD, т. 1, т. 2: Наука и Техника, 4-е изд, 2008/ D1 и D2 (два транзистора - р- и n-канальный - в одном корпусе) позволяют пропускать ток через обмотку реле К1 как в прямом, так и в обратном направлении. Контакт В1 (ОП) необходим для диагностики канала мажоритарной схемы. Если в канале, к которому относится вторая контактная группа выходного реле, оба контакта замкнуты, то через оптопару /Зарубежные микросхемы, транзисторы, диоды +SMD, т. 1, т. 2: Наука и Техника, 4-е изд, 2008/ D3 проходит малый ток в обход исполнительного элемента. По наличию или отсутствию этого тока можно судить о замыкании реле в канале.
В блоке ФСУ 6.5-24 выходных каскада. Для уменьшения числа сигналов управления и элементной базы блока транзистор D2 делается единым на группу реле, а сигналы состояния с выходов оптронов поступают на вход микроконтроллера по матричной схеме.
Общий вид блока ФСУ 6.5 представлен на фиг. 15.
Блок БДД 6.7 предназначен для приема дискретных сигналов типа «сухой контакт». При соблюдении полярности подключения блок БДД 6.7 может принимать сигналы типа «открытый коллектор». Для чтения входных сигналов блоку необходимо дополнительное питание, гальванически отвязанное от питания блока. Блок БДД 6.7 рассчитан на напряжение питания датчиков +27 В, при этом через контакты датчиков проходит ток 50 мА. Общие провода подключаемых к блоку БДД датчиков объединяются.
Входной каскад бока БДД 6.7 представлен на фиг. 16. Входной каскад блока БДД 6.7 состоит из оптрона D4, токозадающего резистора R1, диодной сборки V1 и согласующего резистора R10 /Зарубежные микросхемы, транзисторы, диоды +SMD, т. 1, т. 2: Наука и Техника, 4-е изд, 2008/. Диодная сборка предназначена для защиты от входного напряжения и разделения каналов при тестировании.
Остальные элементы, представленные на фиг. 16, являются общими для группы входных сигналов. Это элементы отключения питания и общего провода источника питания датчиков (D1.2, D2.1, D3.1, D5.1) и элементы тестирования (D1.1, D3.2).
Тестирование проводится в два этапа:
открываются транзисторы D1.1 и D1.2, что вызывает протекание тока через все входные оптроны и соответствует замкнутому состоянию всех подключенных к блоку датчиков; закрываются транзисторы D1.1 и D1.2, что вызывает прекращение протекания тока через все входные оптроны и соответствует разомкнутому состоянию всех подключенных к блоку датчиков.
Общий вид блока БДД 6.7 представлен на фиг. 17.
Блок КЦУ 6.6 (блок контроля цепей управления) предназначен для контроля целостности цепей подключения исполнительных механизмов путем формирования малых токов, протекающих в обход мажоритарной цепи управления исполнительными элементами блоков ФСУ 6.5.
Принцип действия блока КЦУ отображен фиг. 18.
Входной каскад блока КЦУ состоит из: цепи контроля подключения исполнительного элемента (R1, V1, D1) /Зарубежные микросхемы, транзисторы, диоды +SMD, т. 1, т. 2: Наука и Техника, 4-е изд, 2008/.
При включенном питании +Uпит., разомкнутых контактах К1.1-К3.2, исправной цепи управления и наличии исполнительного элемента по цепи от +Uпит., R1, V1, D1 протекает ток, вызывающий открывание оптрона. При отказе исполнительного элемента или нарушении линий связи ток прекращается, и оптрон закрывается. Таким образом, по состоянию оптрона V1 проводится оценка исправности цепи управления.
Блок АЦП 6.3 /Зарубежные микросхемы, транзисторы, диоды +SMD, т. 1, т. 2: Наука и Техника, 4-е изд, 2008/ предназначен для приема нормированных аналоговых сигналов, их преобразования в цифровой код и групповой гальванической развязки.
Блок АЦП 6.3 осуществляет следующие функции:
- прием и аналого-цифровое преобразование нормированного сигнала по 24 каналам в диапазоне от 0 до 10 В, с разрешением 12 бит и погрешностью не более 0,1%;
- групповая гальваническая развязка аналоговых сигналов от цифровых сигналов блока;
- автокалибровка по контрольным точкам.
Измерительный канал блока АЦП 6.3 состоит из мультиплексора ADG1674, 12 битного АЦП с поразрядным уравновешиванием и параллельным выходом - AD1674 и устройства гальванической развязки (/Зарубежные микросхемы, транзисторы, диоды +SMD, т. 1, т. 2: Наука и Техника, 4-е изд, 2008/).
Работа блока АЦП 6.3 заключается в последовательном циклическом преобразовании всех 24 аналоговых сигналов, поступающих на входы блока, в коды и сохранении этих значений кодов в оперативной памяти процессора блока.
Для борьбы с помехами осуществляется цифровая фильтрация входного потока данных от каждого датчика методом скользящего среднего с окном не менее четырех отсчетов (Баскаков С.И. Радиотехничнские цепи и сигналы. Москва, 1988 (гл. 15); www.irbislab.ru/module.php, Практическая реализация цифрового фильтра). Так как основной помехой является наводка от сети питания, то период опроса входных сигналов выбирается таким образом, чтобы в период 20 мс входило четное число отсчетов каждого входного сигнала, частота опроса при этом кратна 100 Гц. Частота опроса и окно усреднения зависят от реального быстродействия блока и могут быть увеличены по результатам макетирования блока АЦП.
Общий вид блока АЦП 6.3 представлен на фиг. 19.
Блок ЦАП 6.4 /Зарубежные микросхемы, транзисторы, диоды +SMD, т. 1, т. 2: Наука и Техника, 4-е изд, 2008/ позволяет принимать цифровые сигналы по CAN-сети и формировать из цифрового кода аналоговые выходные сигналы.
Блок ЦАП 6.4 обеспечивает прием команд управления, задание поканальных режимов работ и цифровых кодов по CAN-сети, обработку и преобразование цифрового кода в аналоговые сигналы 16 каналов с групповой гальванической развязкой.
Представление входных сигналов целочисленным кодом со знаком (±32000), при этом в диапазоне: от 4 до 20 мА и от 0 до 5 мА - 1 единица младшего разряда соответствует 1 мкА; от 0 до 10 В - 1 единица младшего разряда соответствует 1 мВ.
Программирование блока ЦАП 6.4 осуществляется через специальный разъем Х3, установленный на ППМ блока.
Настройка каналов на оговоренные параметры выходных сигналов производится индивидуально для каждого канала программным способом. Предусмотрена индивидуальная программная тарировка данных по каждому каналу, что позволяет работать с данными, представленными в единицах физических величин. Пересчет кодов по таблицам тарировки выполняются в процессе работы блока автоматически по каждому каналу в соответствии с заданным режимом.
Масштабные коэффициенты по сети могут загружаться в память блока и храниться там (проводится изготовителем блока).
Цикл обновления данных по всем каналам - не более 20 мс.
Скорость общения блока с другими устройствами CAN-сети может выбираться из значений: 125, 250, 500, 1000 Кбит/с.
Групповая гальваническая развязка допускает рабочее напряжение между любыми аналоговыми каналами и питающим напряжением - не менее 500 В.
Блок ЦАП 6.4 имеет гальваноразвязанный выход на CAN-сеть.
Напряжение изоляции не менее 500 В.
Дополнительная погрешность преобразования от изменения температуры окружающей среды на каждые 10°C не более 50% от значений основной погрешности преобразования.
Блоки ЦАП 6.4 взаимозаменяемы без дополнительных настроек и регулировок.
Питание блока ЦАП осуществляется от источника питания постоянного тока напряжением 24 В ±10%.
На лицевой панели блока располагается светодиод «+24 В» зеленого цвета, сигнализирующий о наличии питания и светодиод СН красного цвета, сигнализирующий о неисправности блока.
Потребляемая мощность не более 15 Вт.
Программное обеспечение ИУК АСУ
/см. www/comhitech.ru/html.cgi/arhiv/01_07/stat_104.html/Интегрированная среда разработки программ микроконтроллеров Futjitsu/.
Структура программного обеспечения
Программное обеспечение ИУК АСУ, в соответствии с последними достижениями в области проектирования и эксплуатации автоматизированных систем контроля и управления сложным технологическим оборудованием / Теория и практика построения автоматизированных систем мониторинга технического состояния космических средств: монография / О.В. Майданович, В.А. Каргин, В.В. Мышко, М.Ю. Охтилев, Б.В. Соколов; под ред. О.В. Майдановича - СПб., ВКА имени А.Ф. Можайского, 2011. - 219 с/, имеет двухуровневую структуру своего построения: нижний уровень - уровень датчиков и/или исполнительных устройств и обработки данных, получаемых от программируемых логических контроллеров, к которым могут быть подключены датчики, коммутаторы, собирающие измерительную информацию от датчиков, уровень двухстороннего обмена данными с технологическими станциями верхнего уровня, уровень реализации алгоритмов управления объектов контроля; верхний уровень - уровень рабочих мест операторов ИУК АСУ, на которых обеспечивается диалог с оператором, визуализация получаемых с нижнего уровня данных, обработка и анализ результатов испытаний, ведение протоколов работы комплекса и архивов, взаимодействие с АСУ вышестоящего уровня.
С учетом задач, которые должны решаться программным обеспечением ИУК АСУ, разработана структура ПО (см. фиг. 20). Как видно из структуры, все ПО подразделяется на две группы:
общее ПО (ОПО) /www.hbc.ru/service/itdevelop/data-center/syssoft/;
прикладное ПО (ППО) /http://tpl-it.wikispaces.com/.
Общее ПО обеспечивает функционирование технических средств комплекса, информационное взаимодействие вычислительного оборудования, определенную технологию разработки, отладки и эксплуатации ПО, обусловленные выбранной программно-аппаратной платформой. Функции общего ПО определяются не только структурой технических средств но и потребностями прикладного ПО, реализующего выполнение функциональных задач. Поэтому общее программное обеспечение может различаться как по составу системного ПО, так и по составу модулей в зависимости от функционального назначения конкретного устройства.
Прикладное ПО обеспечивает функционирование объекта управления, контроль и диагностику в соответствии со штатной технологией. Функции прикладного ПО определяются требованиями и параметрами объекта управления (ИУК АСУ).
В состав общего ПО входит /www.lessons-tva.info/edu-inf1/e-inf1-3-1.html/:
- системное ПО;
- прикладное системное ПО;
- диагностическое (тестовое) ПО.
Системное ПО обеспечивает функционирование технических средств и других составных частей ПО комплекса.
В состав системного ПО включаются:
- операционные комплексы вычислительных средств;
- драйверы, обеспечивающие функционирование аппаратных средств;
- сетевое ПО, реализующее удаленное взаимодействие процессов;
- комплексы исполнения, функционирующие в операционных средах;
- графические оболочки, функционирующие в операционных средах;
- системы управления базами данных СУБД.
Прикладное системное ПО включает в себя компоненты, обеспечивающие функционирование определенного класса оборудования и решение таких задач, как:
- обеспечение резервирования и мажоритирования информационных каналов и каналов управления;
- поддержание интерфейса взаимодействия с оператором АРМ;
- обеспечение взаимодействия с объектами контроля и смежными системами;
- регистрацию, документирование и архивацию информации в процессе работы комплекса;
- поддержку проведения метрологических работ.
Диагностическое (тестовое) ПО обеспечивает:
- проверку работоспособности ИУК АСУ в процессе ее включения и работы в автоматизированном режиме, периодически или по команде оператора;
- обнаружение неисправностей, как комплекса в целом, так и отдельных устройств и модулей, каналов информационных связей;
- электрические проверки комплекса и цепей связи с элементами объектов управления и смежными системами.
В состав прикладного ПО входит /http://tpl-it.wikispaces.com/:
ПО АРМ 4 инженера-испытателя,
/http://bolid.ru/production/orion/po-orion/arm_orion.html/;
ПО алгоритмов мониторинга и управления / Теория и практика построения автоматизированных систем мониторинга технического состояния космических средств: монография / О.В. Майданович, В.А. Каргин, В.В. Мышко, М.Ю. Охтилев, Б.В. Соколов; под ред. О.В. Майдановича - СПб., ВКА имени А.Ф. Можайского, 2011. - 219 с./;
имитационное ПО /www.lessons-tva.info/edu-inf1/e-inf1-3-1html/.
ПО АРМ обеспечивает взаимодействие инженера-испытателя, контролера, РР с комплексом при выполнении функций управления, контроля и диагностики технологических процессов.
ПО алгоритмов мониторинга и управления обеспечивает выполнение основных функций управления, контроля и диагностики технологических процессов.
Имитационное ПО обеспечивает имитацию работы ИУК АСУ и смежных систем на различных этапах их разработки и функционирования.
Программное обеспечение этапа эксплуатации поддерживает трехуровневую иерархическую структуру аппаратных средств ИУК АСУ:
нижний уровень (уровень БВВИ) - прием измерительной информации от датчиков и выдача управляющих команд на исполнительные элементы, обеспечение питанием устройств комплекса;
средний уровень (уровень УУ) - обработка первичных данных, выполнение алгоритмов мониторинга диагностики и управления технологическим оборудованием, двустороннее взаимодействие с АРМ средствами сетевого системного кросса (ССК) и заполнение сервера архива;
верхний уровень (уровень АРМ) - визуализация технологических данных, обеспечение интерактивного взаимодействия с оператором, передача управляющих воздействий в УУ. На данном уровне расположены АРМ операторов различных систем и АРМ инженера, который дополнительно контролирует техническое состояние аппаратных средств.
В ПО ИУК АСУ реализовано выполнение следующих задач:
- задача контроля и диагностики, предусматривающая прием и обработку команд оператора, предварительную обработку сигналов от объекта управления, мониторинг и отображение состояния объекта на АРМ оператора, вывод трендов изменения параметров, вывод сообщений с предупредительной сигнализацией о состоянии параметров и объекта управления;
- задача управления, предусматривающая прием команд и сигналов от смежных систем, прием и обработку команд оператора, предварительную обработку сигналов от объекта управления; выдачу команд ручного и автоматического управления, реализацию алгоритмов управления, вывод сообщений;
- задача протоколирования работы комплекса, предусматривающая распределенное протоколирование всех сигналов от аппаратных средств и действий операторов, а также между ИУК АСУ и смежными системами в ходе работы технологического оборудования подготовки изделия, с привязкой к текущему времени, создание объединенного протокола всех сигналов от аппаратных средств и действий операторов;
- задача тестирования, предусматривающая проверку работоспособности аппаратных средств, проверку прохождения информации по каналам связи (на физическом и логическом уровне);
- задача ведения архива документации, предусматривающая прием и обработку запросов оператора, поиск и отображение требуемых разделов документации, расширение и корректировку базы документов, подготовку и печать требуемых документов;
- задача имитации объекта, предусматривающая описание модели объекта, подготовку и оперативную корректировку параметров моделируемого объекта, прием, формирование и вывод в реальном времени сигналов, описывающих поведение объекта в заданном интервале времени, протоколирование результатов моделирования;
- задача защиты от несанкционированного доступа, предусматривающая защиту заданных функций комплекса от несанкционированного использования, данных от несанкционированного доступа, фиксацию и протоколирование попыток доступа к защищенным ресурсам.
Программное обеспечение АРМ оператора
/http://bolid.ru/production/orion/po-oriori/arm_orion.html/.
ПО АРМ оператора обеспечивает взаимодействие оператора с аппаратным комплексом при выполнении функций мониторинга и управления технологическим оборудованием, а также для контроля, диагностики и поддержания технического состояния аппаратно-программных средств ИУК АСУ.
ПО АРМ оператора реализует интерфейс "оператор-АРМ", позволяющий контролировать текущее состояние объекта управления в целом, отдельных устройств и датчиков, изменять параметры функционирования, запускать и блокировать технологическое оборудование, предупреждать о нестандартных ситуациях и сбоях в системе.
Структурная схема ПО АРМ оператора приведена на фиг. 21.
Для отображения технологического процесса используются различные элементы отображения и управления:
экраны, панели /www.nec-display-solutions.com мониторы и табло коллективного пользования фирмы NEC/ и другие устройства для визуальной и логической группировки условных графических объектов, отображающих состояния технологического процесса (см. фиг. 4);
объекты растровой, векторной (при необходимости, трехмерной графики), представляющие схематические изображения устройств, на которых различными цветовыми схемами индицируется текущее состояние ассоциированного устройства, и к которым могут привязываться контекстные меню, позволяющие изменять состояние устройства, если это позволяет технология; различные индикаторы и шкалы, представляющие значения датчиков и параметров комплекса, а также произвольных арифметических выражений от них; графики изменений значений датчиков и производных параметров; диалоговые окна и строки информации, позволяющие предоставить оператору информацию о ходе технологического процесса и управлять его прохождением; протоколы для регистрации истории событий, тревог и сообщений; кнопки, позволяющие запускать разрешенные технологические процессы; главное меню экрана, управляющее программой и этапами выполнения технологического процесса; общее контекстное меню, используемое для смены экранов и работы со вспомогательными журналами комплекса.
Пример визуального отображения технологического процесса представлен на фиг. 4.
Подсистема взаимодействия с оператором реализует поддержку интерфейса, обработку команд оператора и передачу в технологический контроллер разрешенных в данный момент управляющих воздействий, инициирующих запуск новых технологических процессов, изменение параметров текущих процессов или их завершение.
Для реализации интерфейса могут быть использованы следующие решения: командные кнопки; главное меню экранной формы; контекстное меню, которое может быть привязано к любому графическому элементу; поля ввода и выбора информации различного типа и формата.
Кроме того, необходимость участия оператора в управлении состоянием и параметрами технологического процесса может быть инициирована с помощью технологических сообщений. Технологические сообщения имеют различный формат и функциональную нагрузку и реализуют как механизм взаимодействия с оператором, так и возможность влияния на ПО АРМ из технологических алгоритмов.
Виды технологических сообщений: сообщения с ожиданием ответа и без; сообщения с показом дополнительной информации; сообщения с изменяемым параметром для запроса значения от оператора; сообщения для управления формами представления и отдельными графическими элементами; сообщения для управления работой операторских терминалов и т.д.
Подсистема контроля прав доступа к АРМ и управлению реализует механизм авторизации оператора для работы с данной комплексом и следит за соблюдением предоставленных ему прав на выполнение тех или иных операций (www.cnews.ru/revuiews/free/oldcom/security/sarp_products/shtml; ПАК СЗИ НСД «Аккорд-Рубеж 1.4»).
Подсистема резервирования и передачи функций управления (www.alpro-automatic.ru/technology/basicsbulding/ Резервированная АСУТП), контролируя работоспособность и полномочия терминалов, обеспечивает корректность одновременной работы нескольких терминалов АРМ одной комплекса. Терминал может работать в основном или вспомогательном режиме. С основного терминала оператор имеет возможность отправлять управляющие воздействия в технологический контроллер, в то время как вспомогательный терминал работает только на прием и визуализацию данных. Во избежание коллизий управляющих воздействий, основной терминал может быть только один в каждый момент времени. Вспомогательный терминал, получая тот же самый объем технологических данных, в любой момент готов заменить основной. Передача управления от основного терминала вспомогательному может быть произведена как вручную по инициативе оператора, так и автоматически в случае отказа основного терминала. В процессе штатной работы вспомогательные терминалы обычно используются для отображения дополнительной информации (графиков, протоколов работы, и т.д.).
Служба регистрации событий (http//:msch.microsoft.com/ru-ru/library/office/ Практическое руководство. Создание обработчиков событий Project-Server и регистрация событий) реализует сбор и отправку серверу архива информации обо всех значимых фактах, характеризующих работу ПО АРМ и действия оператора, например, изменение внешнего вида графических элементов, прием и вывод технологических сообщений, пользовательский ввод и последующую отправку управляющих воздействий и т.д., то есть множество достаточно детальной информации, необходимой для восстановления картины и анализа правильности функционирования АРМ и корректности действий оператора.
Подсистема межмашинного обмена (www.iaes.ru/ Ландман А.К. Петров А.Э. Сакаев О.О. Организация межмашинного обмена информацией в иерархической системе противоаварийного управления ЦСПА ОЭС Сибири.: ЗАО Институт автоматизации энергетических систем, 2014-2015) (служба сетевого взаимодействия) реализует передачу информации о состоянии объекта и запросов на ввод данных от устройства управления (УУ ТП) и команд оператора в УУ АРМ.
Программное обеспечение УУАРМ/ТП
Программное обеспечение УУ (ПО УУ) предназначено для обеспечения поддержки выполнения алгоритмов управления, контроля работоспособности, формирования признаков аппаратной и функциональной исправности, формирования достоверных массивов входной и выходной информации и реконфигурации ПО УУ в случае обнаружения отказа.
ПО УУ (совместно с аппаратурой УУ) обеспечивает выполнение следующих функций:
- управления аппаратными средствами УУ;
- обеспечения взаимодействия с БВВИ по сети нижнего уровня;
- выдачи команд в БВВИ для ОУ;
- приема информации из БВВИ от ОУ;
- обеспечение межканального обмена в УУ;
- обеспечение связи с АРМ по сети верхнего уровня;
- контроля и диагностики аппаратных средств УУ;
- обеспечения отказоустойчивости УУ.
В состав ПО УУ входит /www.lessons-tva.info/edu-inf1/e-inf1-3-1.html/:
- системное ПО;
- прикладное системное ПО;
- диагностическое (тестовое) ПО.
Системное ПО УУ обеспечивает функционирование технических средств и других составных частей ПО комплекса.
В состав системного ПО УУ включаются:
операционная система; драйверы, поддерживающие взаимодействие с аппаратными средствами; система обновления ПО. Обеспечивает удаленное обновление ПО через АРМ.
В состав прикладного системного ПО УУ включается следующие подкомплекса и службы:
- подсистема межмашинного обмена;
- подсистема исполнения алгоритмов управления;
- модуль пакетной передачи данных;
- служба регистрации событий;
- служба времени;
- служба восстановления и резервного переключения;
- подсистема синхронизации и мажоритирования;
- служба сторожевого таймера;
- служба переключения режимов работы.
Структурная схема ПО УУ приведена на фиг. 22.
Подсистема межмашинного обмена. Обеспечивает связь с другими хост-компьютерами (со смежными каналами УУ, с контроллерами БВВИ с АРМ), базируется на семействе протоколов TCP/IP (Стандарты вычислительных сетей. Взаимосвязи сетей. Справочник. - Кудиц-Образ, 2000, 278 с. ISBN: 5-93378-012-Х; Амато Вито, Основы организации сетей Cisco.: т. 1, т. 2).
Модуль пакетной передачи данных. Обеспечивает обработку команд поступающих от АРМ для дальнейшей передачи их в алгоритмы управления и подготовку к передаче информационных сообщений для АРМ, сформированных в алгоритмах управления. Включает в свой состав следующие модули:
- модуль поддержки очереди команд (www.gaw.ru/ 16-ти разрядный микроконтроллер фирмы Futjitsu MB90F497).
- модуль поддержки очереди сообщений (www.citforum.ru/ Игнатович Н. IBM MQSeries: архитектура системы очередей сообщений.: Открытые системы, №9-10/1999).
Служба регистрации событий (https://Microsoft.com/ru-ru/library/cc732119.aspx/Настройка регистрации событий) Регистрирует события, происходящие в УУ: регистрация контрольных точек выполняемых алгоритмов, изменения аналоговых датчиков на заданные уставки, изменения дискретных датчиков, команды передаваемые с АРМ, неисправности, результаты тестирования и прочее.
Служба времени (https://Microsoft.com/ru-ru/library/cc731191.aspx/Настройка службы времени)отвечает за синхронизацию времени между УУ и серверами времени и обеспечивает обслуживание технологических таймеров используемых в алгоритмах управления. В состав службы времени входят:
- подсистема точного времени (www.rtsoft.ru/press/product/details.php/Новые возможности RTX8.1: поддержка протокола точного времени PTP/IEEE 1588/);
- подсистема технологических таймеров (www.meradat.ru/catalog/list2level.php)
- реализация протокола синхронизации времени
(http://support.microsoft.com/kb/307897/ru-ru/kb/307897/Синхронизация времени).
Служба восстановления и резервного переключения (www.mdl.ru/Futjitsu/20140605-01.htm/Основанная на кластере технология контроллера для реализации отказоустойчивой сети). На данную службу возложены функции восстановления управляющих сигналов из межканальных связей в случае перезапуска контроллера УУ. Перезапуск контроллера может происходить после замены неисправных модулей в процессе штатной работы комплекса.
Подсистема синхронизации и мажоритирования (http://support.microsoft.com/kb/307897/ru-ru/kb/307897/Синхронизация времени). Подсистема занимается мажоритированием однородных сигналов, получаемых в трех каналах УУ и синхронизацией алгоритмов управления.
Служба сторожевого таймера /http://winlios.ru/37-programmnye-tajmery.html/. Служит для предотвращения программных зависаний контроллера.
Служба переключения режимов работы /http://winlios.ru/37-programmnye-tajmery.html/. Отвечает за перераспределение потоков обрабатываемых данных в случае изменения режима работы УУ. Возможные режимы работы УУ: штатная работа; режим имитации.
Подсистема исполнения алгоритмов управления /www/comhitech.ru/html.cgi/arhiv/01_07/stat_104.html/Интегрированная среда разработки программ микроконтроллеров Futjitsu/. Обеспечивает выполнение алгоритмов управления.
Диагностическое (тестовое) ПО обеспечивает обнаружение неисправностей отдельных устройств и модулей, а также каналов информационных связей в штатном режиме работы.
Программное обеспечение БВВИ
Программное обеспечение БВВИ (ПО БВВИ) предназначено для контроля работоспособности, формирования признаков аппаратной и функциональной исправности, формирования достоверных массивов входной и выходной информации и реконфигурации ПО БВВИ в случае обнаружения отказа. В состав ПО БВВИ входит /www.lessons-tva.info/edu-inf1/e-inf1-3-1.html/:
системное ПО; прикладное системное ПО; диагностическое (тестовое) ПО.
Структурная схема ПО БВВИ приведена на фиг. 23.
Системное ПО БВВИ обеспечивает функционирование технических средств и других составных частей ПО комплекса.
В состав системного ПО БВВИ включаются: операционная система;
драйверы, поддерживающие взаимодействие с аппаратными средствами;
система обновления ПО. Обеспечивает удаленное обновление ПО через АРМ.
В состав прикладного системного ПО БВВИ включаются следующие подсистемы и службы:
- подсистема ввода-вывода /www.delphi.int.ru/articles/113/;
- подсистема межмашинного обмена (Стандарты вычислительных сетей. Взаимосвязи сетей. Справочник. - Кудиц-Образ, 2000, 278 с. ISBN: 5-93378-012-Х Амато Вито, Основы организации сетей Cisco.: т. 1, т. 2);
- служба регистрации событий (https://Microsoft.com/ru-ru/library/cc732119.aspx/Настройка регистрации событий);
- служба времени (https://Microsoft.com/ru-ru/library/cc731191.aspx/Настройка службы времени);
- служба восстановления и резервного переключения (www.mdl.ru/Futjitsu/20140605-01.htm/Основанная на кластере технология контроллера для реализации отказоустойчивой сети);
- подсистема синхронизации и мажоритирования (http://support.microsoft.com/kb/307897/ru-ru/kb/307897/Синхронизация времени);
- служба сторожевого таймера /http://winlios.ru/37-programmnye-tajmery.html/;
- служба переключения режимов работы.
Подсистема ввода-вывода. Обеспечивает связь БВВИ с ОУ и включает в себя алгоритмы первичной обработки технологической информации. В состав подкомплекса ввода-вывода входят:
- модули интерфейсных плат ввода-вывода, обслуживающие различные интерфейсы (по необходимости: RS-485, RS-232, CAN, Ethernet и другие) /www.cisco.eom/cisco/web/support/ru/9/99/92023-vwicmf_el.pdf/;
- модуль первичной обработки технологической информации, который служит для обработки информации получаемой от ОУ / Теория и практика построения автоматизированных систем мониторинга технического состояния космических средств: монография / О.В. Майданович, В.А.Каргин, В.В. Мышко, М.Ю. Охтилев, Б.В. Соколов; под ред. О.В. Майдановича - СПб., ВКА имени А.Ф. Можайского, 2011. - 219 с/.
Сбор первичной информации и выдача сигналов управления в БВВИ осуществляется при помощи блоков дискретного и аналогового ввода-вывода (АЦП, НДД, ФСУ) и блоков контроля цепей управления (КЦУ) /Зарубежные микросхемы, транзисторы, диоды +SMD, т. 1, т. 2: Наука и Техника, 4-е изд, 2008/. Блоки дискретного и аналогового ввода-вывода и каждый контроллер БВВИ объединены в общую сеть с интерфейсом CAN v. 2.0 /www.ixxat.com/usb-to-can-v2_en.html/.
ПО блоков ввода-вывода состоит из:
- ПО драйвера CAN, которые служит для обмена по CAN-интерфейсу и является универсальным для всех блоков /www.micromax.ru/solutions/theory-practice/article/2160/;
- ПО драйвера блока, которое является специальным ПО, обслуживающим только данный тип блока (http://darxton.ru/catalog_section/spetsializirovannye-drayvery-shd/).
Подсистема межмашинного обмена (Стандарты вычислительных сетей. Взаимосвязи сетей. Справочник.- Кудиц-Образ, 2000, 278 с. ISBN: 5-93378-012-Х Амато Вито, Основы организации сетей Cisco.: т. 1, т. 2). Обеспечивает связь с другими хост-компьютерами (со смежными каналами БВВИ с контроллерами УУ). Поддерживается подмножество семейства протоколов TCP/IP.
Служба регистрации событий (htpp//:msch.microsoft.com/ru-ru/library/office/ Практическое руководство. Создание обработчиков событий Project-Server и регистрация событий). Регистрирует события, происходящие в БВВИ: изменения аналоговых датчиков на заданные уставки, изменения дискретных датчиков, получение новых управляющих сигналов от УУ, неисправности, результаты тестирования и т.д.
Служба времени (https://Microsoft.com/ru-ru/library/cc731191.aspx/Настройка службы времени). Отвечает за синхронизацию времени между БВВИ и серверами времени.
Служба восстановления и резервного переключения (www.mdl.ru/Futjitsu/20140605-01.htm/Основанная на кластере технология контроллера для реализации отказоустойчивой сети). На данную службу возложены функции восстановления управляющих сигналов из межканальных связей в случае перезапуска контроллера. Перезапуск контроллера может происходить по причине срабатывания супервизора или сторожевого таймера или после замены неисправных модулей в процессе штатной работы комплекса.
Подсистема синхронизации и мажоритирования http://support.microsoft.com/kb/307897/ru-ru/kb/307897/Синхронизация времени). Подсистема занимается мажоритированием однородных сигналов получаемых в трех каналах БВВИ для дальнейшей передачи в БУУСК.
Служба сторожевого таймера /http://winlios.ru/37-programmnye-tajmery.html/. Служит для предотвращения программных зависаний контроллера.
Служба переключения режимов работы (www.mdl.ru/Futjitsu/20140605-01.htm/Основанная на кластере технология контроллера для реализации отказоустойчивой сети). Отвечает за перераспределение потоков обрабатываемых данных в случае изменения режима работы БВВИ. Возможные режимы работы БВВИ: штатная работа; режим имитации.
Диагностическое (тестовое) ПО /www.lessons-tva.info/edu-inf1/e-inf1-3-1.html/ обеспечивает обнаружение неисправностей отдельных устройств и модулей, а также каналов информационных связей в штатном режиме работы
База данных технической информации БДТИ ИУК /http://bd-sql-xml.org.ua/index/php/luchshee-po-bd/233-vidy-bd/.
Основное назначение комплекса БДТИ состоит в обеспечении:
- записи в реальном масштабе времени и долговременного хранения (архивации) регистрируемых событий и данных об истории работы технологического оборудования, работе технических средств, действиях персонала на всех этапах эксплуатации технологического оборудования;
- многопользовательского доступа к информации для проведения мониторинга состояния контролируемых систем на заданных интервалах времени с возможностью представления данных в графическом и табличном виде;
- возможности печати графических и табличных данных, а также их документирования в виде HTML страниц.
Сервер архива (http://www.adastra.ru/products/runtime/scada/siad/) принимает и обрабатывает данные от ПО всех уровней ИУК АСУ. Система регистрации событий дублирована, в случае отказа основного сервера архива произойдет переключение на резервный архив с последующей синхронизацией записанных данных, также реализовано резервное хранение всех поступивших данных.
Архив - представляет собой реляционную базу данных /http://bd-sql-xml.org.ua/index/php/luchshee-po-bd/233-vidy-bd/, организация взаимосвязи между таблицами которой оптимизирована по скорости записи поступающих данных. Для каждого события существуют обязательные поля, которыми являются источник, тип и время, а также специфичные данные для каждого типа события.
С точки зрения файловой комплекса архив представляет собой множество бинарных файлов, соответствующих типам регистрируемой информации. Объем архива в целом ограничен только размером свободного дискового пространства.
Структурно архив состоит из следующих модулей:
- модуля приема и распаковки данных
/http://www.opennet.ru/docs/RUS/linux_parallel/node237.html/;
- модуля администрирования /www.opennet.ru/docs/RUS/db_admin/;
- модуля обработки и выполнения запросов
/http://citforum.ru/database/osbd/glava_90.shtml/;
- сервера удаленного доступа /https://msdn.microsoft.com/ru-ru/library/cc736357(v=ws.10).aspx/;
- модулей локальной и удаленной работы /www.litemanager.ru/articles/remote_access_to_the_desktop/.
Модуль приема и распаковки данных обеспечивает:
сетевое общение (прием, квитирование) с подсистемами регистрации событий, входящих в состав ПО всех уровней АСУ;
разбор и проверку корректности поступающих данных;
запись в архив и резервное хранение.
Модуль администрирования позволяет:
определять источники событий, входящих в состав АСУ;
корректировать описания входных данных и форматы вывода данных;
настраивать параметры работы с базой данных;
производить резервное копирование данных.
Модуль обработки и выполнения запросов представляет собой ядро доступа к данным архива, реализует функционал, предоставляемый пользователю (обрабатывая запросы пользователей, предоставляет требуемую информацию).
Сервер удаленного доступа реализует возможность многопользовательской работы с архивом с удаленных рабочих мест.
Модули локальной и удаленной работы предоставляют пользователю интерфейс и различные сервисы для работы с данными архива.
Для просмотра содержимого архива оператор может запросить как весь объем данных, так и задать произвольный фильтр, детализируя интересующие источники данных, типы событий и интервалы времени. Результирующая выборка представляется в табличном виде. Если результат выборки содержит события только одного типа, тогда таблица будет иметь по отдельному столбцу на каждое поле данных события, если же выборка состоит из событий разных типов - вывод специфичных полей происходит в общий столбец с обобщенным сообщением в соответствующем типу события формате. Над выборкой доступны стандартные сервисные функции сортировки, фильтрации и поиска, а также возможны печать и экспорт данных.
При включении режима мониторинга архив с заданной периодичностью будет опрашиваться на предмет поступления новых подходящих записей, которые добавляются к выборке.
Представление числовой информации также доступно в графическом виде. Для графиков реализованы стандартные возможности масштабирования и настройки визуальных атрибутов.
По умолчанию в окне «Графики» отображаются все значения выбранных технологических параметров, полученных при чтении данных из архивной БД в соответствии с выбранным профилем.
Масштабирование графиков осуществляется при помощи мыши с нажатой левой клавишей. Возврат в исходное положение производится нажатием правой кнопки мыши.
Всплывающее меню при наведении курсора на точку графика с нажатой левой кнопкой мыши отображает пару «время-значение».
Диалог «Настройки» предназначен для выбора параметров отображения графиков на форме и позволяет задавать:
для графика - фон, цвет, толщину, стиль линии и маркеры для отображения значений; для осей и шкал - цвет, толщину, стиль линии, число основных и промежуточных интервалов, длины засечек, а также шрифт, формат и ориентацию меток; для сетки - цвет, толщину, стиль основных и промежуточных линий; для легенды - наличие и положение сопроводительного текста.
Встроенная функция печати позволяет вывести видимую область таблицы на устройство печати, с выбором требуемого устройства через менеджер печати. Существует возможность сохранить видимую область таблицы в виде HTML файла.
Программное обеспечение имитатора объекта
/www/.ulstu.ru/main/view/article/9524/. предназначено для моделирования работы управляемой комплекса. Имитатор особо востребован в процессе разработки и отладки алгоритмов управления, т.к. позволяет:
- работать без полного комплекта аппаратных средств и объекта управления;
- моделировать нештатные ситуации и отказы, которое не всегда просто создать на реальном оборудовании.
Минимально ПО имитатора объекта реализует обмен данными, передавая состояния измерительной информации от имитатора к контроллеру и сигналы управления от контроллера к имитатору, и позволяет в ручном режиме изменять значения измерительной информации. Дополнительно могут быть разработаны алгоритмы, по которым имитатор проводит начальную инициализацию и, отслеживая изменения сигналов управления, запускает алгоритмы, моделирующие работу отдельных устройств, их реакцию на команды управления и сигналы датчиков комплекса. Таким образом, имитируется работа управляемого комплекса в целом и внешние условия, т.е. имитатор программно исполняет роль объекта управления и УСО, реализуя обмен данными. Разработка имитатора ведется параллельно с разработкой баз описания объекта и алгоритмов управления.
Интерфейс программного имитатора представлен на фиг. 24.
Управление конфигурацией программного обеспечения /www.doza.ru/docs/radiation_control/PO_Configurator.pdf/
ПО предназначено для: конфигурации сети Ethernet; конфигурации устройств, входящих в состав комплекса.
Конфигуратор представляет собой визуальное средство обновления ПО на контроллерах и других устройствах комплекса управления. Благодаря интеграции необходимых функций, процесс установки ПО становится более удобным, надежным и быстрым.
Конфигуратор предназначен для выполнения основных операций по загрузке ПО на различные сетевые устройства комплекса управления. Установка ПО подразумевает физическую запись различных файлов программ и проектов на разного типа сетевые устройства (контроллеры, автоматизированные рабочие места и др.). Для увеличения скорости, удобства и надежности все операции (как подготовительные, так и основные) интегрированы в едином инструменте. Операции, обеспечиваемые конфигуратором, выполняются над всеми сетевыми узлами комплекса автоматически по запросу оператора. О результатах выполнения операции оператор судит по выдаваемым сообщениям.
Тестирование программного обеспечения /www.protesting.ru/testing/. Для оценки качества ПО всегда применяется целый комплекс мер, среди которых тестирование ПО на предмет обнаружения ошибок - один из важнейших этапов. Тестирование ПО проводится на соответствие заранее определенным требованиям (по функциональности, производительности, безопасности и пр.). Поскольку объект тестирования сложный, необходим системный подход к тестированию, его организации и проведению. Тестирование разделено по уровням задач и объектов на разных стадиях и этапах разработки ПО:
- тестирование частей ПО (модулей, компонентов) с целью проверки правильности реализации алгоритмов;
- функциональное тестирование подсистем и ПО в целом с целью проверки степени выполнения функциональных требований к ПО;
- нагрузочное тестирование (в том числе стрессовое) для выявления характеристик функционирования ПО при изменении нагрузки (интенсивности обращений к нему, наполнения базы данных и т.п.).
Модульному тестированию подвергаются небольшие модули (процедуры, классы и т.п.). При тестировании относительно небольшого модуля есть возможность проверить, если не все, то, по крайней мере, многие логические ветви в реализации, разные пути в графе зависимости данных, граничные значения параметров. В соответствии с этим строятся критерии тестового покрытия (покрыты все операторы, все логические ветви, все граничные точки и т.п.).
Проверка корректности всех модулей, к сожалению, не гарантирует корректности функционирования комплекса модулей. Полностью реализованный программный продукт подвергается системному тестированию. На данном этапе тестера интересует не корректность реализации отдельных процедур и методов, а вся программа в целом, как ее видит конечный пользователь. Основой для тестов служат общие требования к программе, включая не только корректность реализации функций, но и производительность, время отклика, устойчивость к сбоям, атакам, ошибкам пользователя и т.д. Для системного и компонентного тестирования используются специфические виды критериев тестового покрытия (например, покрыты ли все типовые сценарии работы, все сценарии с нештатными ситуациями, попарные композиции сценариев и проч.).
Аппаратно-программный комплекс подвергается тестированию на всех этапах его эксплуатации:
- при проведении пуско-наладочных работ;
- перед проведением штатных работ;
- в ходе проведения планового годового обслуживания комплекса.
Взаимодействие со смежными системами
/www.ermasoft.ru/ru/main/GeoLogist/Complecs/Sistem_integrator.asp/.
Смежными системами для ИУК АСУ являются комплексы: АСУ ПП, КИАСУ, НИУКСИ.
Автоматизированная система управлением подготовкой и пуском РН (АСУ ПП).
АСУ ПП является информационной комплексом технического комплекса ТК.
ИУК АСУ выдает в АСУ ПП основные параметры текущих операций.
Связь ИУК АСУ с АСУ ПП происходит по двум резервирующим друг друга каналам Ethernet. Используется пакетный метод передачи данных. Каждый пакет данных квитируется контрольной суммой пакета.
Стыковка оборудования ИУК АСУ и АСУ ПП осуществляется в помещениях ТК.
Контрольно-измерительная аппаратура комплекса управления РН (КИАСУ) передает команды в ИУК АСУ по следующему порядку функционирования газораспределительного модуля ГРМ при проведении испытаний на ТК. ИУК АСУ осуществляет управление функционирования ГРМ при проведении испытаний на ТК в соответствии с заданными режимами.
Стыковка оборудования ИУК АСУ и КИАСУ осуществляется в помещениях ТК.
Наземный информационно-управляющий комплекс комплекса измерений (НИУКСИ).
ИУК АСУ должно получать от НИУКСИ определенные данные от датчиков на борту изделия для осуществления автоматизированного контроля в масштабе реального времени.
Стыковка оборудования ИУК АСУ и НИУКСИ осуществляется в помещениях ТК.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрированная автоматизированная система космодрома | 2017 |
|
RU2669330C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ПОДГОТОВКОЙ РАКЕТ-НОСИТЕЛЕЙ | 2011 |
|
RU2450306C1 |
| КОМПЛЕКС ЭЛЕКТРООБОРУДОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНЫХ РЕАКТОРОВ | 2014 |
|
RU2574289C2 |
| Тренажерный комплекс для подготовки эксплуатационного персонала Автоматизированных систем управления технологическим процессом (АСУ ТП) | 2019 |
|
RU2699688C1 |
| АВТОМАТИЗИРОВАННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ЗАПРАВКОЙ КРИОГЕННОГО РАЗГОННОГО БЛОКА | 1995 |
|
RU2084011C1 |
| Программно-технический комплекс контроля, управления и предиктивной диагностики технологического оборудования подъемно-транспортного механизма | 2021 |
|
RU2770052C1 |
| Система автоматического управления электрогидравлической системы регулирования | 2021 |
|
RU2759419C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОПЕРЕКАЧИВАЮЩИМ АГРЕГАТОМ "КВАНТ-Р" | 2017 |
|
RU2660216C1 |
| Программно-технический комплекс контроля и управления технологическими процессами в горно-обогатительном производстве | 2018 |
|
RU2698627C1 |
| АВТОМАТИЗИРОВАННЫЙ КОРАБЕЛЬНЫЙ КОМПЛЕКС СВЕТОСИГНАЛЬНОЙ СВЯЗИ | 2015 |
|
RU2600121C1 |
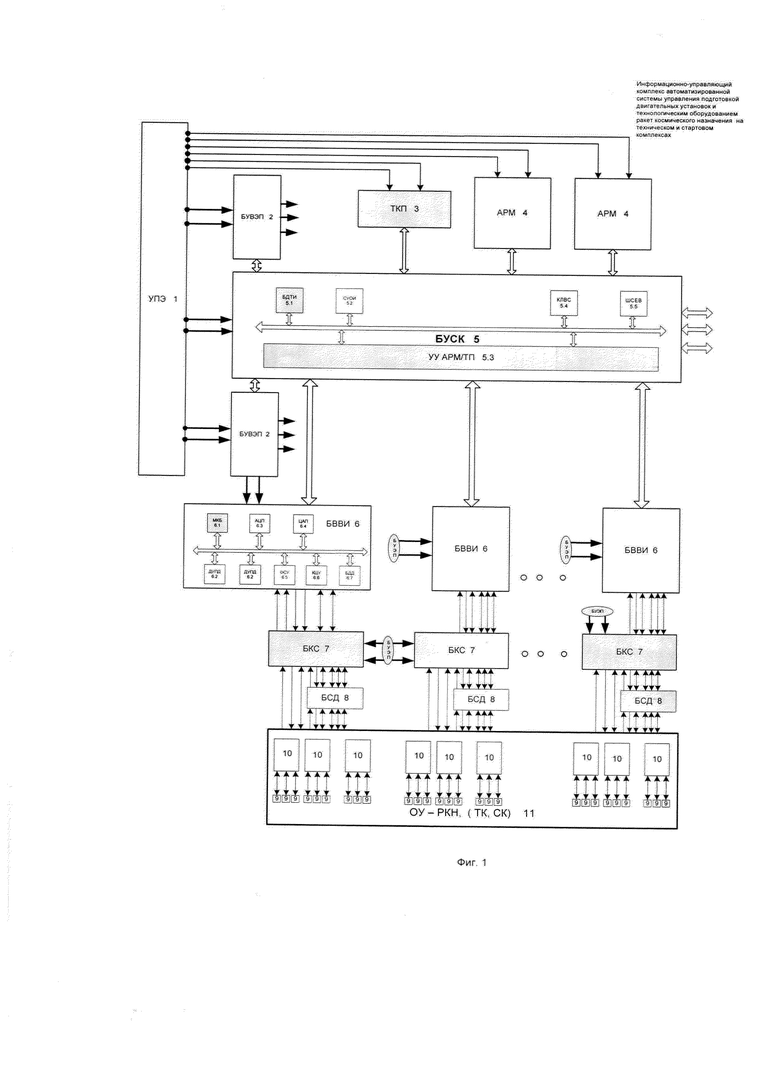
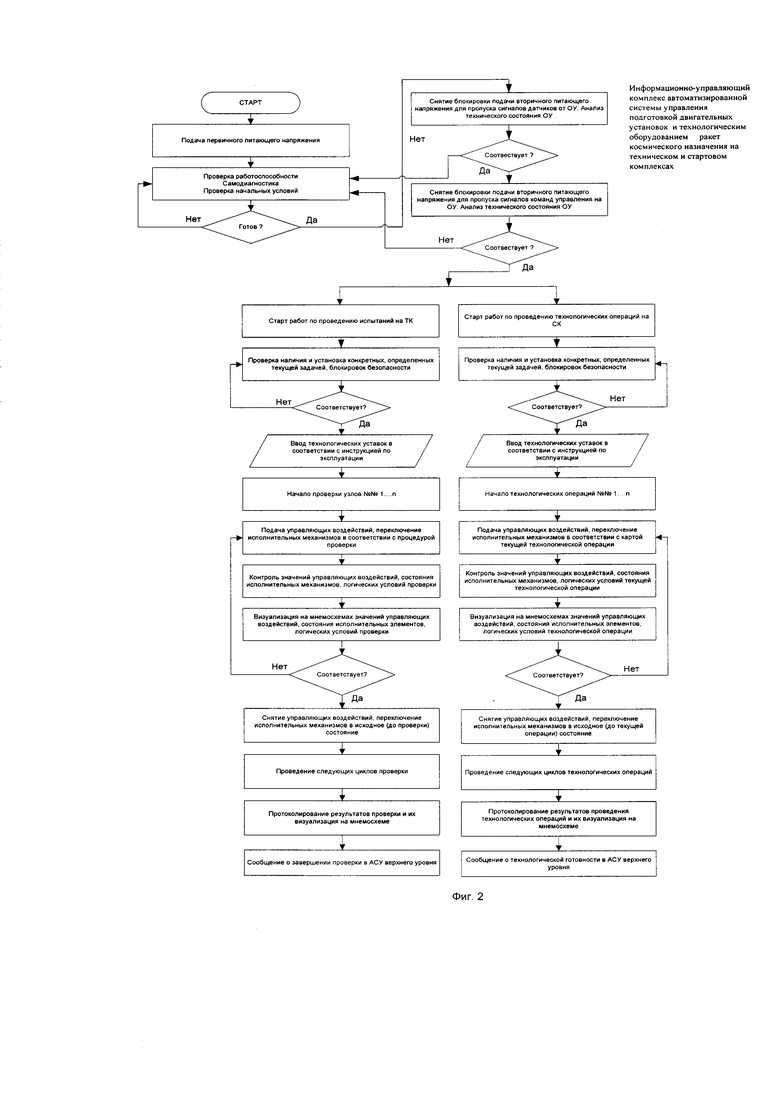
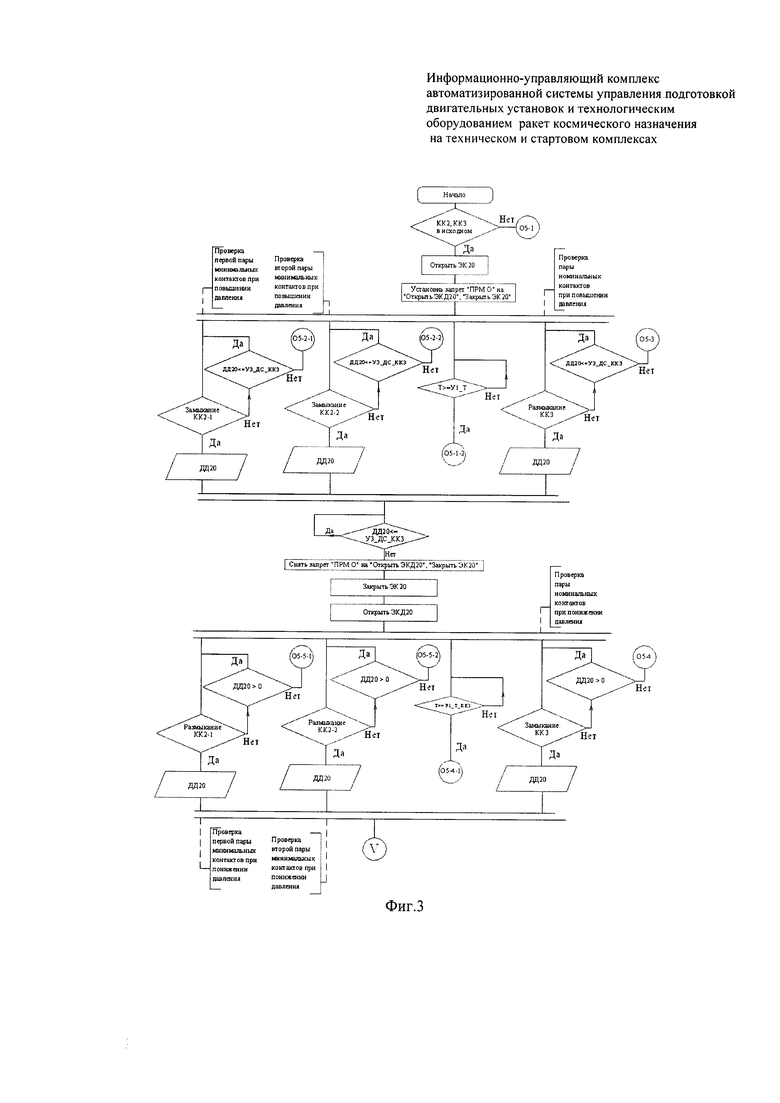
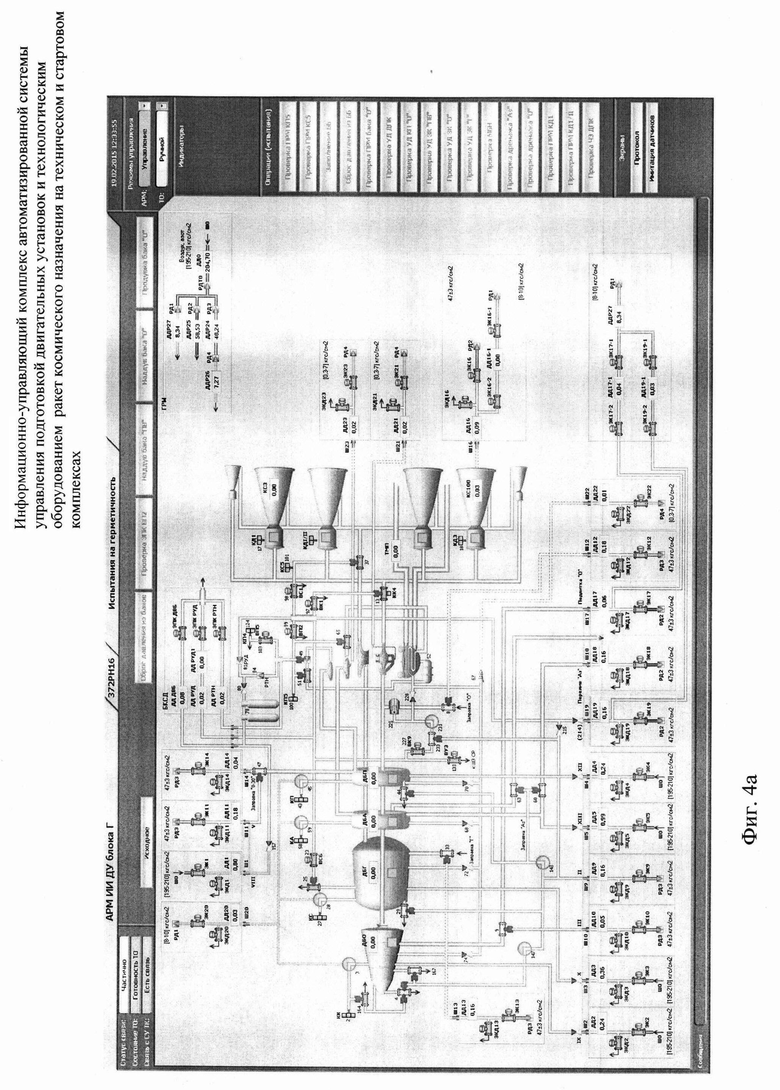
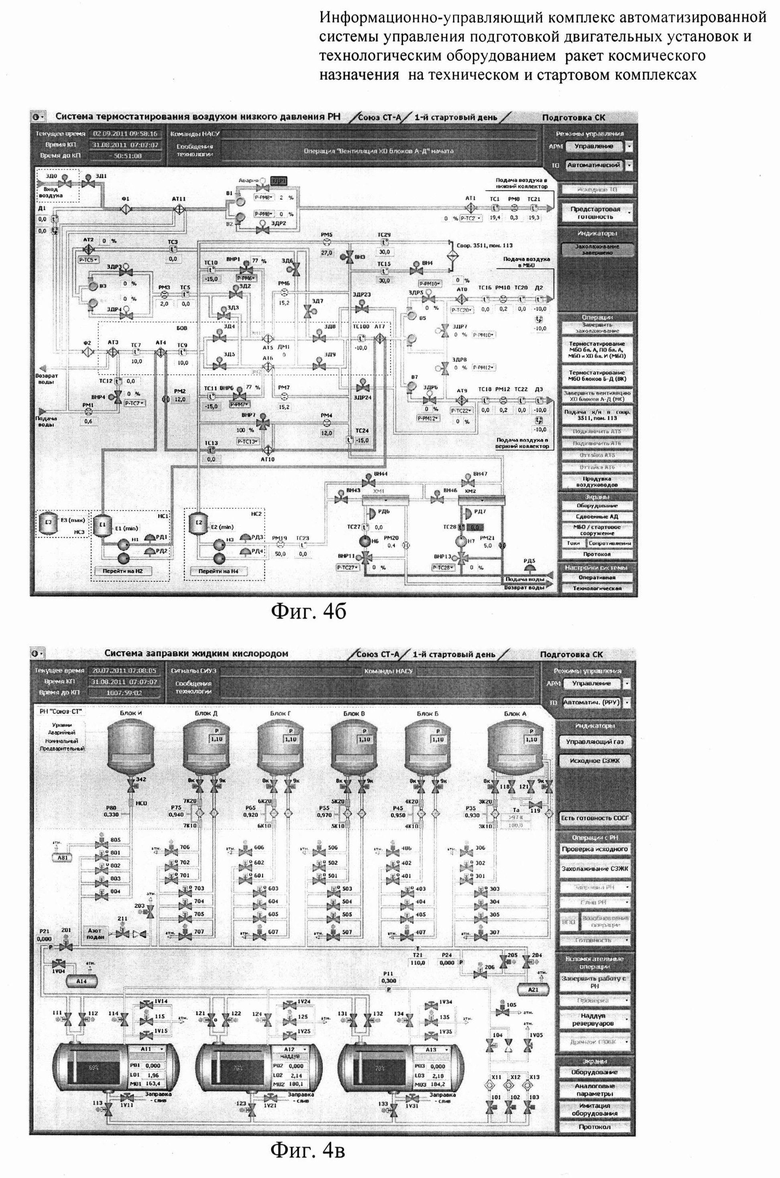

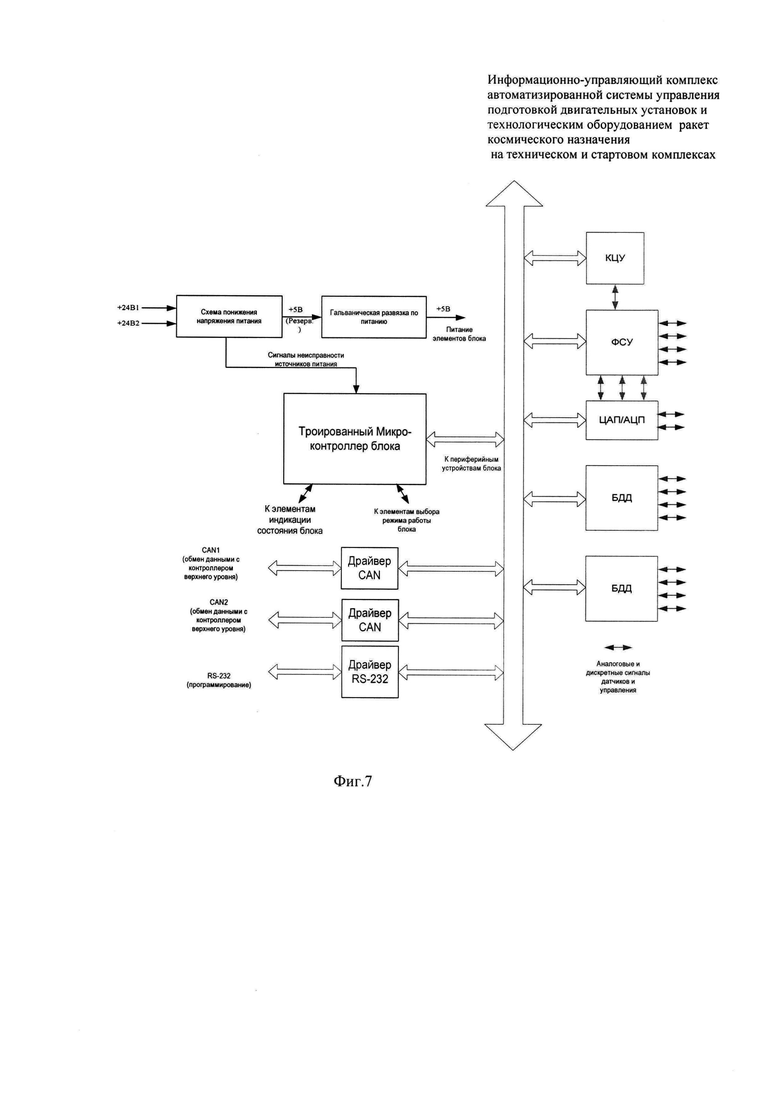

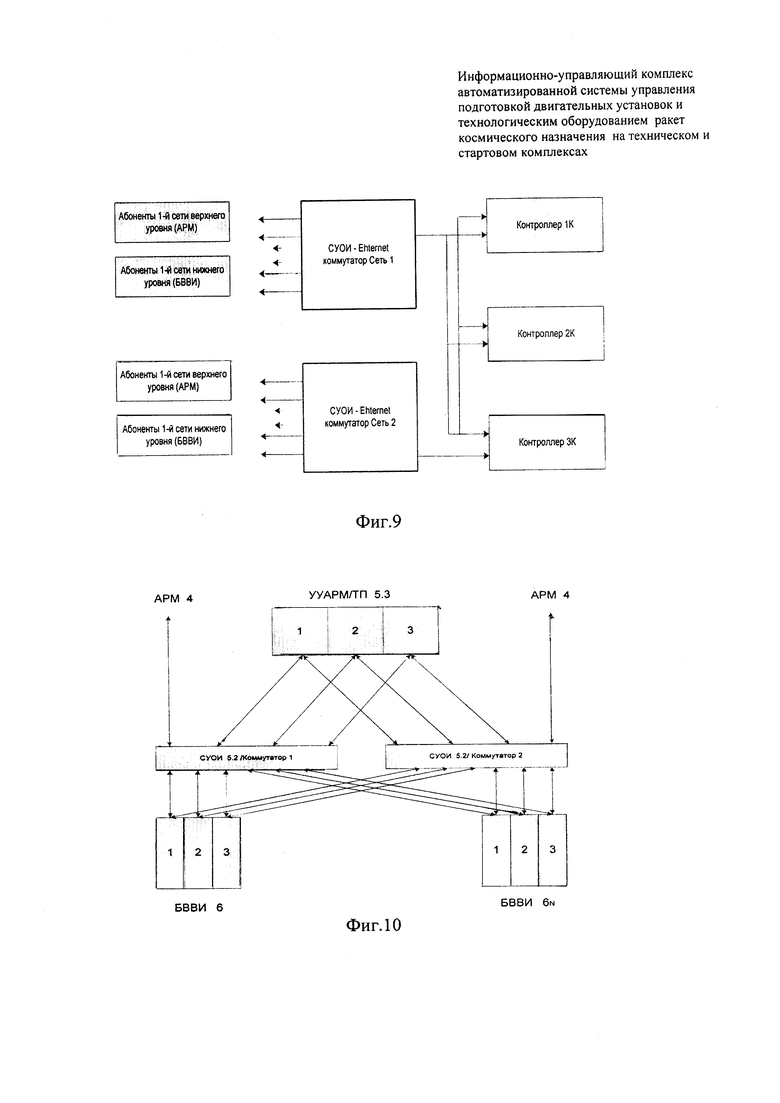

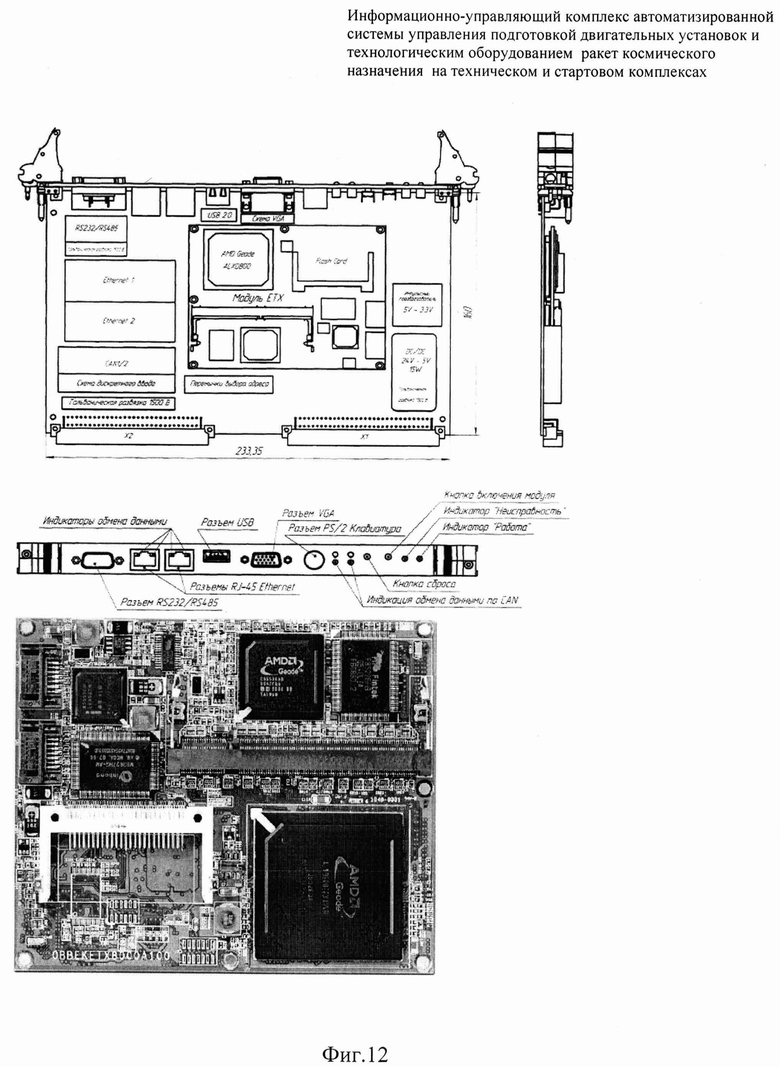

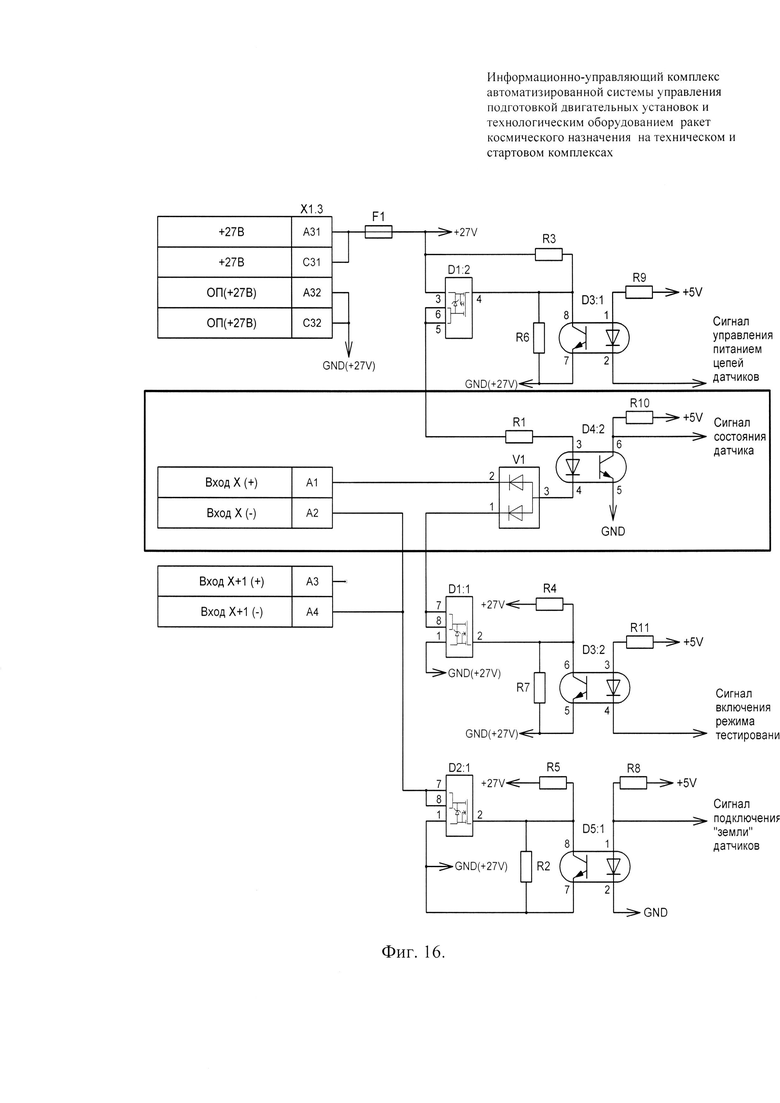
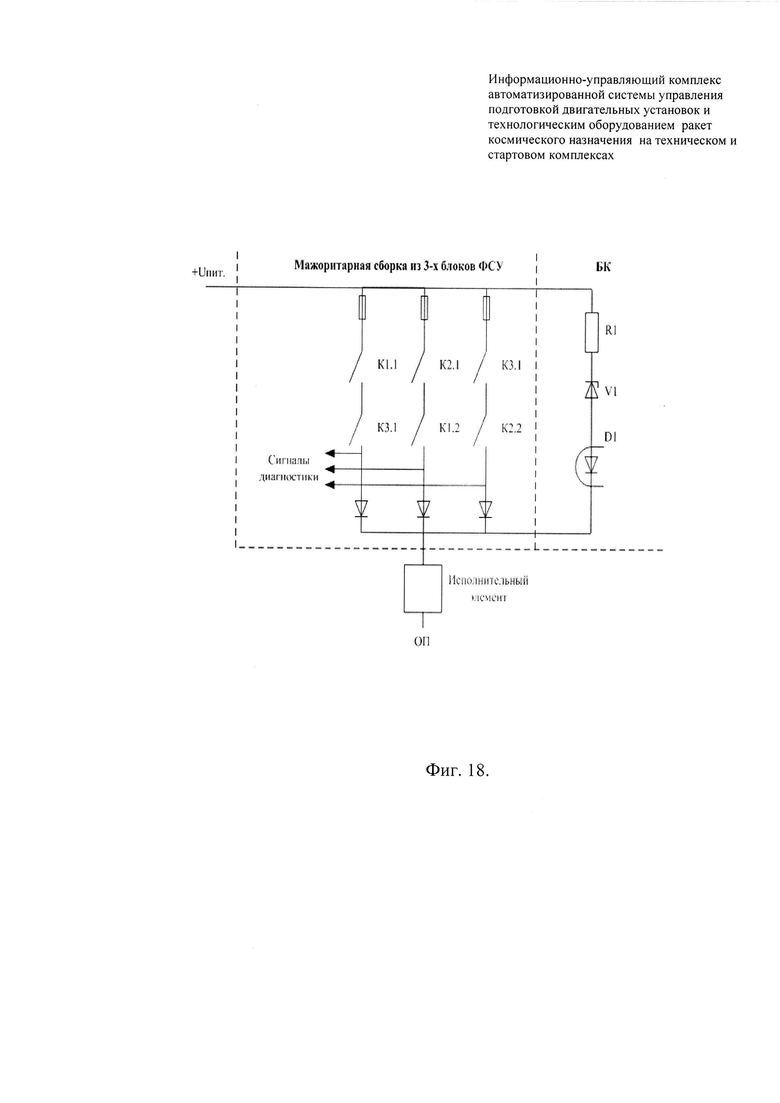
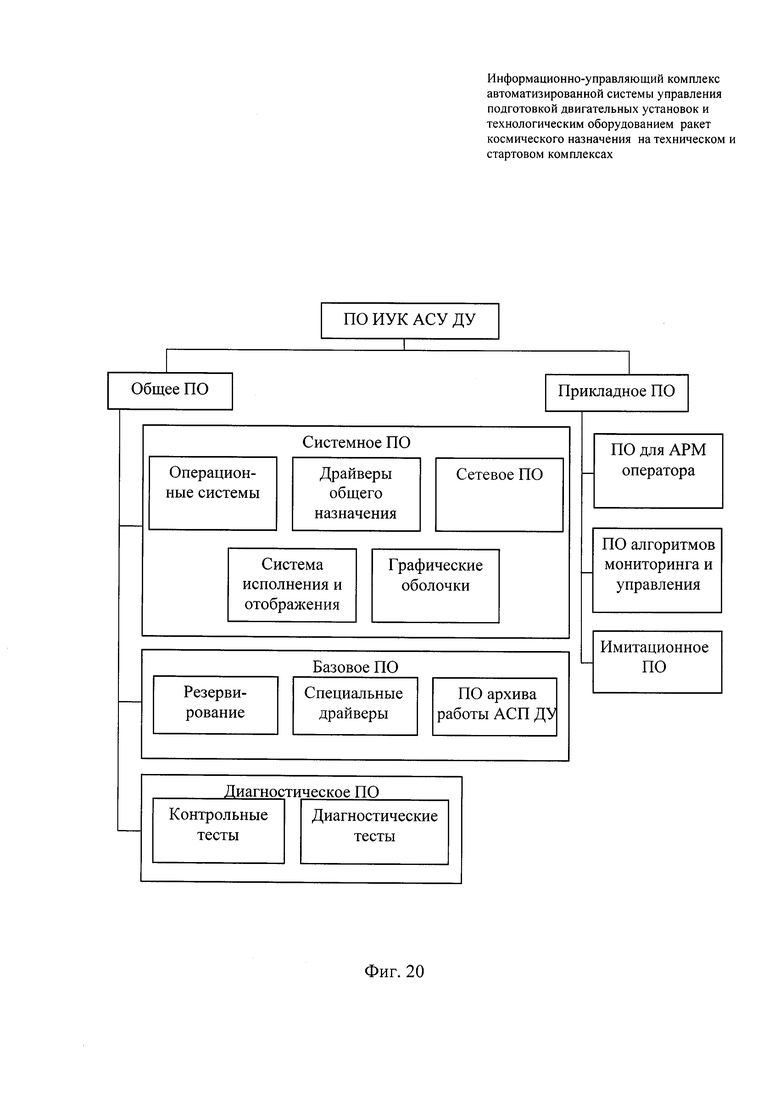

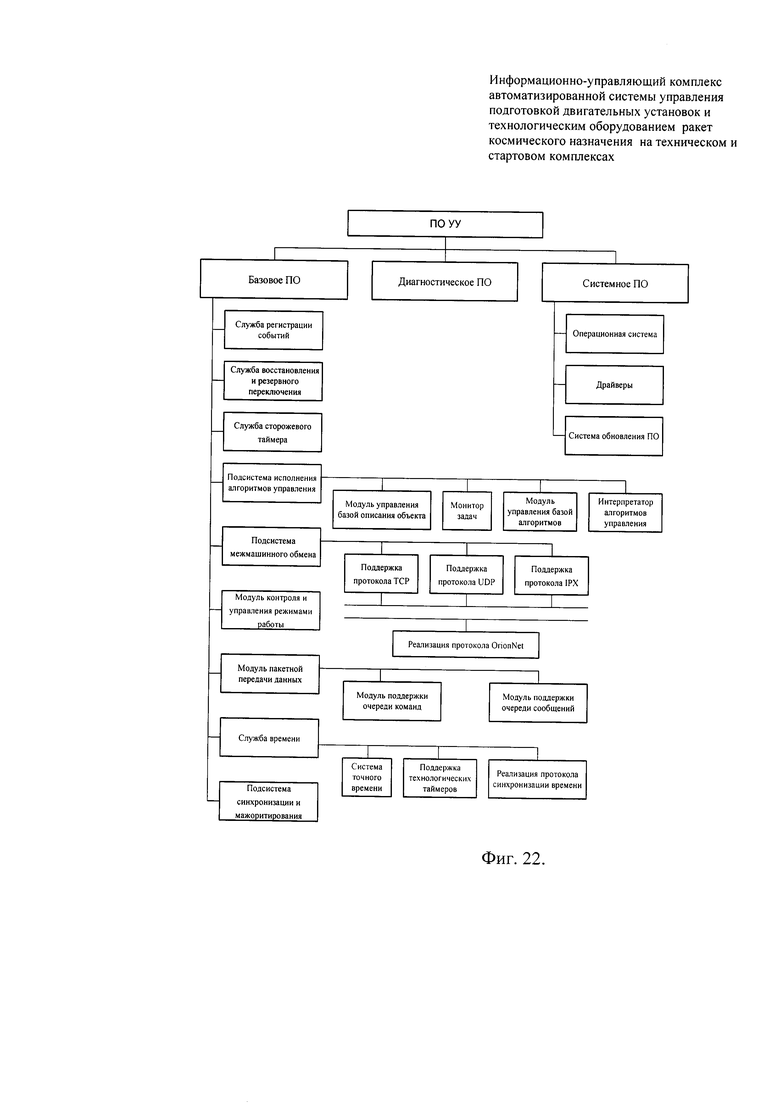
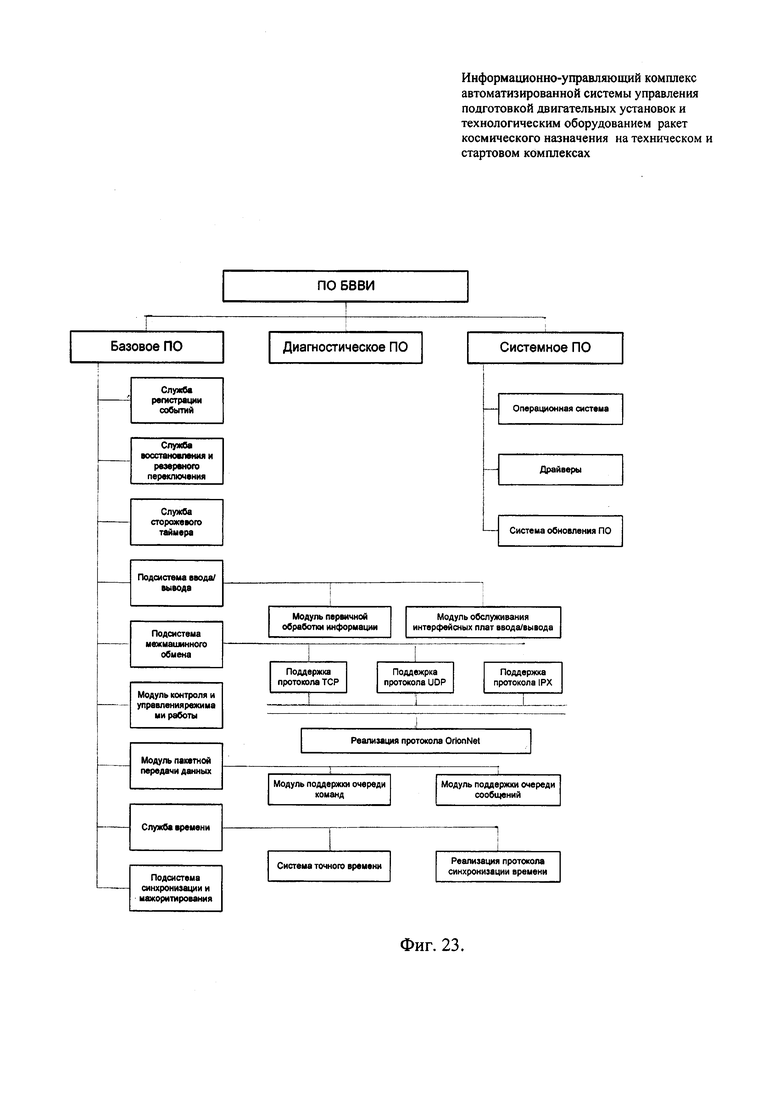
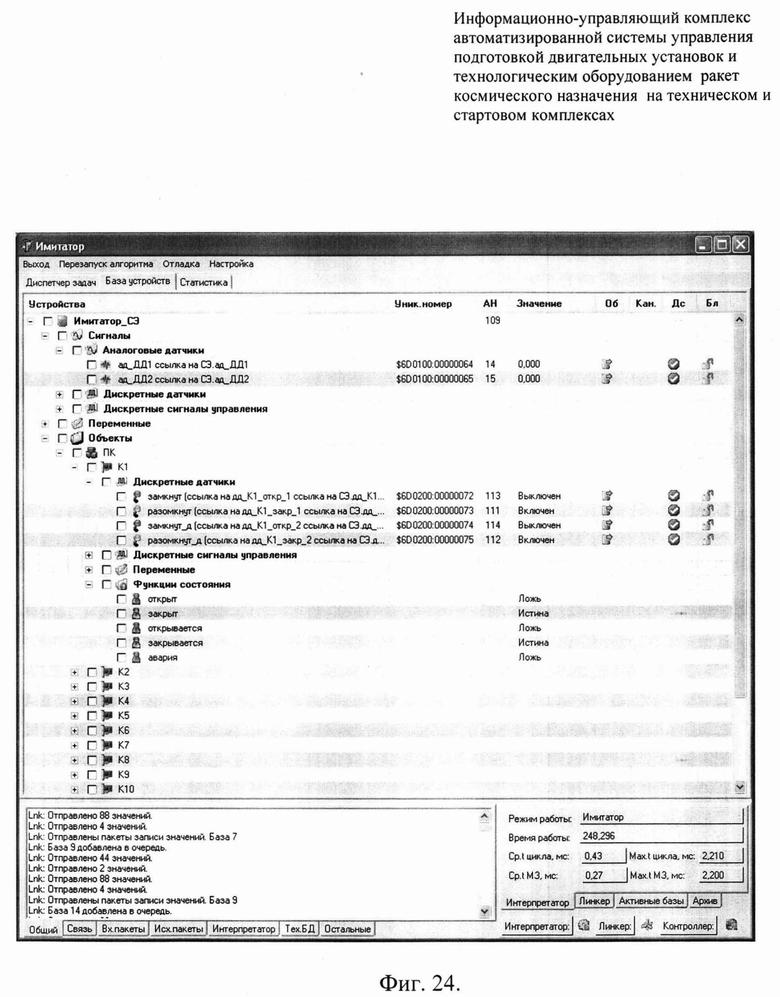
Информационно-управляющий комплекс автоматизированной системы управления (ИУК АСУ) подготовкой двигательных установок (ПДУ) и технологическим оборудованием (ТО) ракет космического назначения (РКН) на техническом и стартовом комплексах (ТК И СК) содержит автоматизированные рабочие места операторов (АРМ), блок управления связи и коммутации (БУСК) с устройствами коммутации локальной вычислительной сети (КЛВС), шлюз связи с комплексом единого времени (ШСЕВ), блоки ввода-вывода измерительной информации и сигналов управления (БВВИ), табло коллективного пользования (ТКП), блоки кабельных соединений (БКС), блоки соединений датчиков и исполнительных механизмов (БСД), четыре двунаправленные шины данных, исполнительные механизмы БКН, соединенные определенным образом. Блоки БВВИ содержат блок ввода дискретных данных (БДД), аналого-цифровой и цифроаналоговый преобразователи (АЦП И ЦАП), формирователь сигналов управления (ФСУ), устройство первичного электропитания (УПЭ), блоки управляемого вторичного электропитания (БУВЭП), микроконтроллер блока (МКБ), драйверы управления передачи данных по двунаправленным шинам (ДУПД), контроллер целостности цепей управления (КЦУ). БУСК содержит базу данных технологической информации (БДТИ), систему управления информационным обменом (СУИО), устройство управления АРМ пользователя и технологическим процессом (УУ АРМ/ТП). Обеспечивается проведение всех видов испытаний двигательных установок ракеты-носителя на техническом и стартовом комплексах. 24 ил.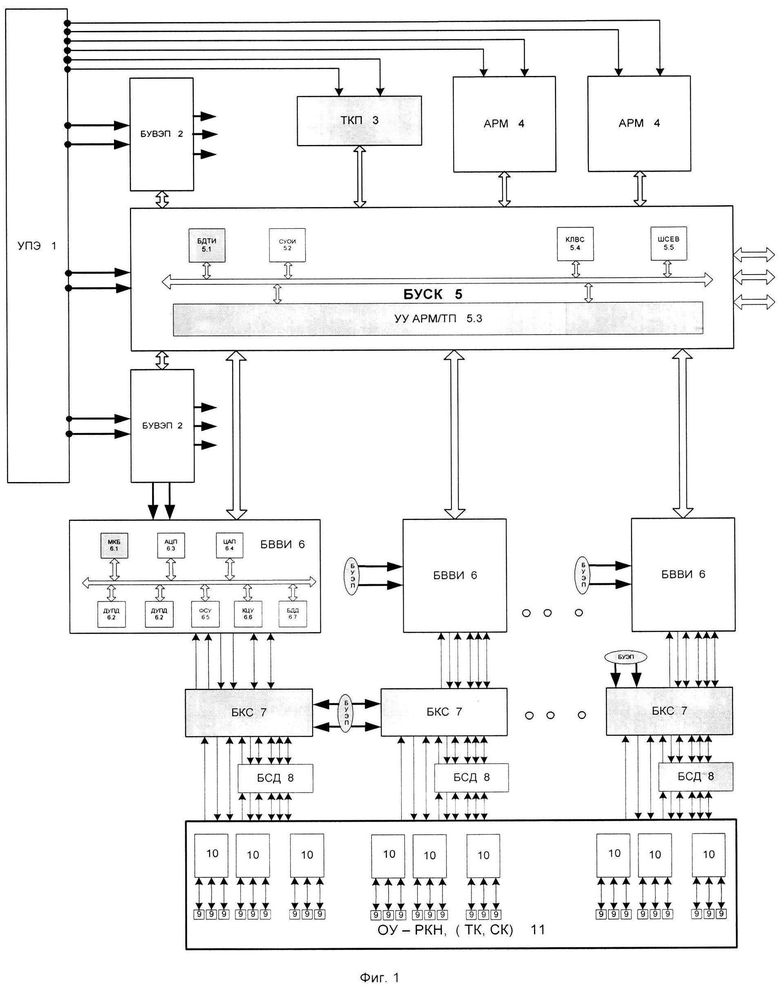
Информационно-управляющий комплекс автоматизированной системы управления (ИУК АСУ) подготовкой двигательных установок (ПДУ) и технологическим оборудованием (ТО) ракет космического назначения (РКН) на техническом (ТК) и стартовом комплексах (СК), содержащий автоматизированные рабочие места (АРМ) операторов, число которых соответствует числу технических подразделений, осуществляющих управление этапами технологического графика (ТГ) подготовки и пуска РКН, блок управления, связи и коммутации (БУСК), содержащий устройства коммутации локальной вычислительной сети (КЛВС), шлюз связи с комплексом единого времени (ШСЕВ), подключенные к первой двунаправленной шине передачи данных, блоки ввода/вывода измерительной информации и сигналов управления (БВВИ), число которых соответствует числу подсистем РКН, обслуживаемых комплексом ИУК АСУ, причем каждый из БВВИ содержит блок ввода дискретных данных (БДД), аналого-цифровой и цифро-аналоговый преобразователи (АЦП и ЦАП) и формирователь сигналов управления (ФСУ), связанных друг с другом второй двунаправленной шиной передачи данных, а также устройство первичного электропитания (УПЭ), и блоки управляемого вторичного электропитания (БУВЭП) по числу блоков БВВИ, отличающийся тем, что введены табло коллективного пользования (ТКП), блоки кабельных соединений (БКС), блоки соединений датчиков и исполнительных механизмов (БСД), причем число БКС и БСД соответствует числу участвующих в подготовке и пуске подсистем РКН с учетом технического и стартового комплексов, при этом БУСК дополнительно содержит базу данных технологической информации (БДТИ), систему управления информационным обменом (СУИО), устройство управления АРМ пользователя и технологическим процессом (УУ АРМ/ТП), связанные с КЛВС и с ШСЕВ первой двунаправленной шиной передачи данных, третьей двунаправленной шиной БУСК связан с ТКП и блоками БВВИ, причем каждый БВВИ дополнительно содержит микроконтроллер блока (МКБ), драйверы управления передачей данных (ДУПД) по двунаправленным шинам и контроллер целостности цепей управления (КЦУ), при этом соответствующие входы/выходы блоков АЦП, ЦАП, КЦУ, ФСУ и БДД являются дискретными входами и аналоговыми входами/выходами БВВИ, а четвертой двунаправленной шиной БУСК связан с блоками вторичного управляемого электропитания БУВЭП, выходы которых служат для подачи электропитания на БВВИ и БКС, при этом соответствующие выходы УПЭ соединены параллельно с соответствующими входами АРМ, ТКП, БУСК и БУВЭП, а сигнальные и управляющие входы и выходы каждого из блоков БВВИ соединены с соответствующими выходами и входами соответствующего БКС, каждый из которых, в свою очередь, связан сигнальными проводами и кабелями с исполнительными механизмами РКН и соответствующим БСД, выходные сигнальные провода и кабели которых связаны с соответствующими датчиками подсистем РКН.
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ПОДГОТОВКОЙ И ПУСКОМ РАКЕТ-НОСИТЕЛЕЙ | 2012 |
|
RU2491599C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ РАКЕТНЫМ КОМПЛЕКСОМ | 1996 |
|
RU2108540C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССАМИ ПОДГОТОВКИ И ЭКСПЛУАТАЦИИ СЛОЖНЫХ ТЕХНИЧЕСКИХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2552881C1 |
| CN 2891495 Y, 18.04.2007 | |||
| CN 201575752 U, 08.09.2010. | |||

