Техническое решение относится к системам управления подъёмно-транспортными механизмами промышленного назначения, а именно – к автоматизированным системам контроля, управления и предиктивной диагностики технологического оборудования подъёмно-транспортных механизмов повышенной опасности в тяжёлых условиях промышленной эксплуатации и может быть использовано для разработки и производства систем управления технологическим оборудованием подъемно-транспортных механизмов любой сложности.
Известно устройство управления электроприводами башенного крана по патенту РФ № 2286305, МПК B66C 13/18, B66C 13/40, опубл. 27.10.2006 Бюл. № 30, которое содержит управляющий блок и блок управления электроприводами, блок определения условий работы и состояния крана, блок преобразования аналоговых сигналов в цифровые сигналы и наоборот и блок контроля состояния электроприводов. Управляющий блок соединен первым двухсторонним каналом связи с блоком преобразования, вторым двухсторонним каналом связи - с блоком определения условий работы и состояния крана, блок управления электроприводами соединен с блоком контроля состояния электроприводов и блоком преобразования, а последний соединен с блоком контроля состояния электроприводов.
Общими признаками предлагаемого технического решения и аналога являются: подключённые к блоку ввода и распределения напряжения питания управляющий блок, средства шифрации и дешифрации аналоговых и цифровых сигналов, устройства управления электроприводами, блок определения условий работы подъёмно-транспортного механизма, блок взаимодействия с оператором, при этом все указанные блоки подключены к общему двухстороннему каналу связи, (в аналоге – управляющий блок и блок управления электроприводами, блок определения условий работы и состояния крана, блок преобразования аналоговых сигналов в цифровые сигналы и наоборот и блок контроля состояния электроприводов).
Недостатком такого устройства является ограничение его функциональных возможностей по числу контролируемых и управляемых параметров, так как контролируемые устройства подключаются к контроллеру через концентраторы связи посредством стандартного последовательного интерфейса, как правило, не обладающего достаточной пропускной способностью и помехоустойчивостью. Кроме того, это устройство не обладает достаточной надёжностью и безопасностью в тяжёлых условиях промышленной эксплуатации, так как контроллер реализован в виде промышленного компьютера и, соответственно, содержит все недостатки этих компьютеров (отсутствие операционной системы реального времени, возможность зависания и т.д.).
Наиболее близким к заявляемому техническому решению по технической сущности и совокупности существенных признаков является устройство управления электроприводами грузоподъёмного механизма по патенту РФ № 2417937, МПК B66C 13/18, опубл. 10.05.2011 Бюл. № 13, взятое в качестве прототипа, которое содержит управляющий блок, средства шифрации и дешифрации аналоговых и цифровых сигналов, командоконтроллеры и органы управления грузоподъёмным механизмом, средства сигнализации и индикации, блок индикации информации о состоянии грузоподъёмного крана, устройства управления электроприводами, датчики состояния и исполнительные устройства, блок определения условий работы, средство связи, блоки управления механизмами, блок взаимодействия с оператором блок ввода и распределения напряжения питания. Все блоки, входящие в состав устройства, выполнены в виде унифицированных, автономных блоков. Блоки управления механизмами содержат устройство управления электроприводом и блок шифраторов и дешифраторов, к которому подключены датчики состояния и исполнительные устройства механизмов. Блок взаимодействия с оператором содержит блок индикации состояния грузоподъёмного механизма и блок шифраторов и дешифраторов, к которому подключены командоконтроллеры, органы управления, средства сигнализации и индикации. Блок ввода и распределения напряжения питания содержит блок шифраторов и дешифраторов, к которому подключены средства ввода и распределения напряжения питания.
Общими признаками предлагаемого технического решения и прототипа являются: блок ввода и распределения напряжения питания, управляющий блок, выполненный на базе подключённого к общему каналу связи единого управляющего микропроцессорного контроллера, программное обеспечение которого имеет модульную структуру, соответствующую механизмам и функциям подъёмно-транспортного механизма, средства шифрации и дешифрации аналоговых и цифровых сигналов, устройства управления электроприводами, блок определения условий работы подъёмно-транспортного механизма, блок диагностики, настройки и управления режимами работы подъёмно-транспортного механизма, блок взаимодействия с оператором, при этом все указанные блоки подключены к общему двухстороннему каналу связи, (в прототипе – подключённые к напряжению питания управляющий блок, блоки шифрации и дешифрации аналоговых и цифровых сигналов, командоконтроллеры и органы управления грузоподъёмным механизмом, средства сигнализации и индикации, блок индикации информации о состоянии грузоподъёмного крана, устройства управления электроприводами, датчики состояния и исполнительные устройства, блок определения условий работы, средство связи, блоки управления механизмами, блок взаимодействия с оператором, средство связи выполнено в виде единого для всех блоков двухстороннего канала связи, к которому подключены все блоки устройства).
Недостатком данного устройства является стандартный подход к измерению и контролю различных параметров технологического оборудования и к алгоритмам управления, так как в таких устройствах применяют только стандартные, унифицированные, автономные технические средства и стандартное программное обеспечение, что ведёт к значительному снижению эффективности и надёжности управления технологическим оборудованием в тяжёлых условиях промышленной эксплуатации. Кроме того, применение стандартных, унифицированных технических средств и стандартного программного обеспечения, существенно снижающих функциональные возможности работы систем управления подъёмно-транспортными механизмами в тяжёлых условиях промышленной эксплуатации, ведёт к снижению защиты от несанкционированного доступа, не обеспечивая безопасной работы производства, а значит, также снижает эффективность контроля и управления подъёмно-транспортным механизмом. Наконец, стандартный подход ведёт к неизбежной избыточности всех компонентов систем управления подъемно-транспортными механизмами, отсутствию отраслевых технологических алгоритмов и, как следствие, к невозможности эффективного и надёжного контроля и управления технологическим оборудованием в тяжёлых условиях эксплуатации в различных отраслях промышленности.
Решаемая техническая проблема заключается в повышении эффективности и надёжности работы программно-технического комплекса (ПТК) в процессе контроля, управления и предиктивной диагностики технологического оборудования подъёмно-транспортного механизма в тяжёлых условиях промышленной эксплуатации за счёт повышения точности, подробности и наглядности представляемой информации для анализа о состоянии технологических параметров технологического оборудования и выработки чётких управляющих воздействий для предотвращения аварийных ситуаций, а также в оперативности доступа к представляемой информации для анализа и оценки состояния технологических параметров и управления в режиме реального времени технологическим оборудованием подъёмно-транспортного механизма путём использования интерфейсных подсистем программно-модульного исполнения и организации взаимосвязи между ними посредством электрических, цифровых и программно-логических каналов связи, снижению зависимости от человеческого фактора по управлению технологическим оборудованием подъёмно-транспортного механизма.
Технический результат заключается в повышении точности, подробности и наглядности представляемой информации для анализа и оценки состояния технологического оборудования подъёмно-транспортного механизма и выработки чётких управляющих воздействий для предотвращения аварийных ситуаций, а также в снижении зависимости от человеческого фактора по контролю, управлению и предиктивной диагностике технологического оборудования подъёмно-транспортного механизма.
Поставленная техническая проблема решается тем, что в ПТК контроля, управления и предиктивной диагностики технологического оборудования подъёмно-транспортного механизма, содержащем блок ввода и распределения напряжения питания, управляющий блок, выполненный на базе единого управляющего микропроцессорного контроллера, программное обеспечение которого имеет модульную структуру, соответствующую механизмам и функциям подъёмно-транспортного механизма, блоки шифрации и дешифрации аналоговых и цифровых сигналов, блоки управления электроприводами, блок определения условий работы подъёмно-транспортного механизма, блок диагностики, настройки и управления режимами работы подъёмно-транспортного механизма, блок взаимодействия с оператором, при этом все указанные блоки подключены к общему двухстороннему каналу связи, согласно техническому решению все указанные блоки ПТК выполнены в виде соединённых между собой посредством аналоговых, цифровых и программно-логических каналов связи в программе упомянутого микропроцессорного контроллера соответственно интерфейсной подсистемы управления напряжением питания, интерфейсной подсистемы ввода/вывода, преобразования, обработки сигналов и управления технологическим оборудованием, интерфейсной подсистемы мониторинга технологических параметров, интерфейсной подсистемы исполнения алгоритмов управления, защит и диагностики технологического оборудования и интерфейсной подсистемы взаимодействия с оператором-машинистом, причём указанный ПТК дополнительно снабжён интерфейсной подсистемой предиктивной диагностики технологического оборудования и интерфейсной подсистемой взаимодействия с сервером сбора, хранения технологических данных и выдачи заданий от автоматизированной системы управления (АСУ) предприятия, которые также подключены к общему двухстороннему каналу связи посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, при этом на базе единого управляющего микропроцессорного контроллера, программное обеспечение которого имеет модульную структуру, соответствующую механизмам и функциям подъёмно-транспортного механизма, выполнен указанный ПТК. Указанная нтерфейсная подсистема управления напряжением питания включает, по меньшей мере, один аппаратный блок ввода/вывода дискретных и аналоговых сигналов, цифровые входы/выходы которого через блок интерфейса соединены посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера с соответствующими цифровыми входами/выходами программного блока драйвера, при этом аналоговые входы указанного аппаратного блока ввода/вывода соединены с соответствующими аналоговыми выходами блока измерения напряжения и силы электрического тока силовых цепей питания технологического оборудования подъёмно-транспортного механизма, дискретные выходы указанного аппаратного блока ввода/вывода соединены с соответствующими дискретными входами блока источников питания и главного контактора, а также блок выпрямителя, цифровые входы/выходы которого через блок управления силовой частью выпрямителя соединены посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера с соответствующими цифровыми входами/выходами программного блока драйвера, причём другие цифровые входы/выходы указанных программных блоков драйверов соединены соответственно с указанной интерфейсной подсистемой предиктивной диагностики технологического оборудования и со всеми остальными указанными интерфейсными подсистемами посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, причём указанный аппаратный блок ввода/вывода дискретных и аналоговых сигналов имеет соответствующие входы для дискретных входных сигналов от соответствующих датчиков безопасности технологического оборудования подъёмно-транспортного механизма. Указанная интерфейсная подсистема ввода/вывода, преобразования, обработки сигналов и управления технологическим оборудованием включает, по меньшей мере, один аппаратный блок ввода/вывода дискретных и аналоговых сигналов, цифровые входы/выходы которого через блок интерфейса соединены посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера с соответствующими цифровыми входами/выходами программного блока драйвера, при этом указанный аппаратный блок ввода/вывода дискретных и аналоговых сигналов имеет дискретные выходы, которые соединены с соответствующими дискретными входами блока управления исполнительными механизмами, и блок силовой части с возможностью формирования посредством силового управления напряжением заданной амплитуды и частоты на электродвигателе, соответствующие цифровые входы/выходы которого посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера через блок управления блоком силовой части соединён с соответствующими цифровыми входами/выходами программного блока драйвера, причём другие цифровые входы/выходы указанных программных блоков драйверов соединены соответственно с указанной интерфейсной подсистемой взаимодействия с сервером сбора, хранения технологических данных и выдачи заданий АСУ предприятия и со всеми остальными указанными интерфейсными подсистемами посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, причём указанный аппаратный блок ввода/вывода дискретных и аналоговых сигналов имеет соответствующие входы для дискретных, аналоговых входных сигналов от соответствующих датчиков контроля электроприводов и исполнительных механизмов подъёмно-транспортного механизма, блок управления исполнительными механизмами имеет соответствующие выходы для дискретных выходных сигналов управления исполнительными механизмами подъёмно-транспортного механизма и блок силовой части имеет соответствующие выходы для силового управления соответствующими электродвигателями в составе электроприводов подъёмно-транспортного механизма посредством силовых кабельных каналов. Указанная интерфейсная подсистема мониторинга технологических параметров включает, по меньшей мере, один аппаратный блок ввода/вывода дискретных и аналоговых сигналов, цифровые выходы которого через блок интерфейса посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера соединены с соответствующими цифровыми входами программного блока драйвера, цифровые выходы которого соединены соответственно с указанной интерфейсной подсистемой взаимодействия с оператором-машинистом и со всеми остальными указанными интерфейсными подсистемами посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, причём указанный аппаратный блок ввода/вывода дискретных и аналоговых сигналов имеет соответствующие входы для дискретных, аналоговых входных сигналов от соответствующих датчиков мониторинга внешних параметров безопасности и состояния подъёмно-транспортного механизма. Указанная интерфейсная подсистема исполнения алгоритмов управления, защит и диагностики технологического оборудования включает программный блок исполнения алгоритмов управления ПТК, связанный посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера с программным блоком исполнения алгоритмов технологических защит и программным блоком исполнения алгоритмов технологической диагностики, соответствующие цифровые входы/выходы которых связаны соответственно между собой, с указанной интерфейсной подсистемой предиктивной диагностики технологического оборудования и со всеми остальными указанными интерфейсными подсистемами посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера. Указанная интерфейсная подсистема взаимодействия с оператором-машинистом включает программный блок драйвера, соответствующие цифровые входы/выходы которого через блок интерфейса посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера соединены с соответствующими цифровыми входами/выходами, по меньшей мере, одного аппаратного блока ввода/вывода дискретных и аналоговых сигналов управления подъёмно-транспортным механизмом со стороны оператора-машиниста и посредством физических сигналов связаны соответственно с блоком взаимодействия с оператором-машинистом и, связанным с упомянутым блоком драйвера, блоком отображения информации о состоянии технологического оборудования подъёмно-транспортного механизма посредством цифровых сигналов соответственно, причём блок взаимодействия с оператором-машинистом и блок отображения информации о состоянии технологического оборудования подъёмно-транспортного механизма выполнены в виде, по меньшей мере, одного автоматизированного рабочего места (АРМ) оператора-машиниста, получающего соответствующие физические и цифровые сигналы ввода/вывода, при этом соответствующие цифровые входы/выходы блока отображения информации о состоянии технологического оборудования подъёмно-транспортного механизма и программного блока драйвера связаны соответственно с указанной интерфейсной подсистемой мониторинга технологических параметров и со всеми остальными указанными интерфейсными подсистемами посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, а указанный аппаратный блок ввода/вывода дискретных и аналоговых сигналов управления подъёмно-транспортным механизмом со стороны оператора-машиниста имеет соответственно аналоговые и цифровые входы/выходы для связи с АРМ подъёмно-транспортного механизма посредством физических и цифровых каналов связи соответственно. Указанная интерфейсная подсистема предиктивной диагностики технологического оборудования включает программный блок вычисления теоретического остаточного ресурса механического и электрического оборудования подъёмно-транспортного механизма с возможностью расчёта с использованием математической модели износа, на вход которой в режиме реального времени поступают соответствующие измеренные и вычисленные параметры, характеризующие нагрузку, возникающую в процессе работы технологического оборудования подъёмно-транспортного механизма и интенсивность его использования, программный блок вибродиагностики с возможностью определения текущего состояния технологического оборудования подъёмно-транспортного механизма, скорости его изменения для выявления состояний, требующих немедленного реагирования, и программный блок планирования сервисного обслуживания с возможностью формирования перечня технологического оборудования и вида проводимого сервисного обслуживания с целью сохранения ресурса ПТК подъёмно-транспортного механизма в целом. Все указанные программные блоки имеют цифровые входы/выходы, которые связаны соответственно между собой посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, при этом результаты расчётов в указанных программных блоках в режиме реального времени поступают соответственно в указанную интерфейсную подсистему взаимодействия с оператором-машинистом и в указанную интерфейсную подсистему взаимодействия с сервером сбора, хранения технологических данных и выдачи заданий АСУ предприятия посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера. Указанная интерфейсная подсистема взаимодействия с сервером сбора, хранения технологических данных и выдачи заданий АСУ предприятия включает блок сбора, предварительной обработки и накопления данных для АСУ предприятия, соответствующие цифровые входы/выходы которого через программный блок обеспечения информационной безопасности, предназначенного для защиты ПТК от воздействия третьей стороны, направленного на несанкционированное получение информации о работе ПТК, возникновение сбоев в работе ПТК, несанкционированную модификацию программного обеспечения ПТК, связаны посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера с программным блоком драйвером взаимодействия с АСУ предприятия, предназначенного для постоянной передачи или передачи по запросу (появлению связи) накопленной информации о работе технологического оборудования в АСУ предприятия, причём программный блок драйвера взаимодействия с АСУ предприятия имеет соответствующие цифровые входы/выходы для связи с сервером сбора, хранения технологических данных и выдачи заданий АСУ предприятия посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, а программный блок сбора, предварительной обработки и накопления данных для АСУ предприятия имеет соответствующие цифровые входы/выходы для связи с указанной интерфейсной подсистемой предиктивной диагностики технологического оборудования и со всеми остальными указанными интерфейсными подсистемами, посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера соответственно.
Указанная совокупность существенных признаков предлагаемого технического решения позволяет повысить эффективность и надёжность контроля, управления и предиктивной диагностики технологического оборудования подъёмно-транспортного механизма за счёт повышения точности, подробности и наглядности, а также оперативности и достоверности полученной информации в режиме реального времени, для анализа технологических параметров и оценки состояния технологического оборудования, на основе которых принимается решение по дальнейшему управлению технологическим оборудованием подъёмно-транспортного механизма в тяжёлых условиях промышленной эксплуатации и выработки чётких управляющих воздействий для предотвращения аварийных ситуаций. Кроме того, указанная совокупность признаков позволяет повысить эффективность и надёжность контроля и управления в режиме реального времени технологическим оборудованием подъёмно-транспортного механизма при работе ПТК за счёт снижения зависимости от человеческого фактора по управлению технологическим оборудованием подъёмно-транспортного механизма путём использования интерфейсных подсистем программно-модульного исполнения и организации взаимосвязи между ними, разделения на функциональные модули и организации взаимосвязей между ними, что позволяет повысить точность, подробность и наглядность представляемой информации для анализа и оценки состояния технологического оборудования подъёмно-транспортного механизма и вырабатывать чёткие управляющие воздействия, для предотвращения аварийных ситуаций, тем самым повышая безопасность эксплуатации технологического оборудования в промышленном производстве. Также указанная совокупность признаков позволяет посредством предиктивной диагностики технологического оборудования подъёмно-транспортного механизма автоматически получать в режиме реального времени в месте контроля и измерения технологических параметров необходимую информацию для дальнейшего управления в режиме реального времени технологическим оборудованием подъёмно-транспортного механизма путём автоматического сравнения с ранее полученными технологическими данными и автоматического внесения корректировок в настройки регуляторов для повышения точности, качества и безопасности ведения технологических работ, что позволяет оперативно и достоверно оценивать качество контроля и управления в режиме реального времени технологическим оборудованием подъёмно-транспортного механизма и своевременно принять решение об их прекращении, как несоответствующим принятым технологическим регламентам и нормам технологических параметров, и тем самым, снизить производственные затраты для дальнейшего ведения технологического процесса, а значит – повысить эффективность и надёжность работ по управлению в режиме реального времени технологическим оборудованием подъёмно-транспортного механизма в тяжёлых условиях промышленной эксплуатации, что в конечном счёте обеспечивает безопасную эксплуатацию подъёмно-транспортного механизма в целом.
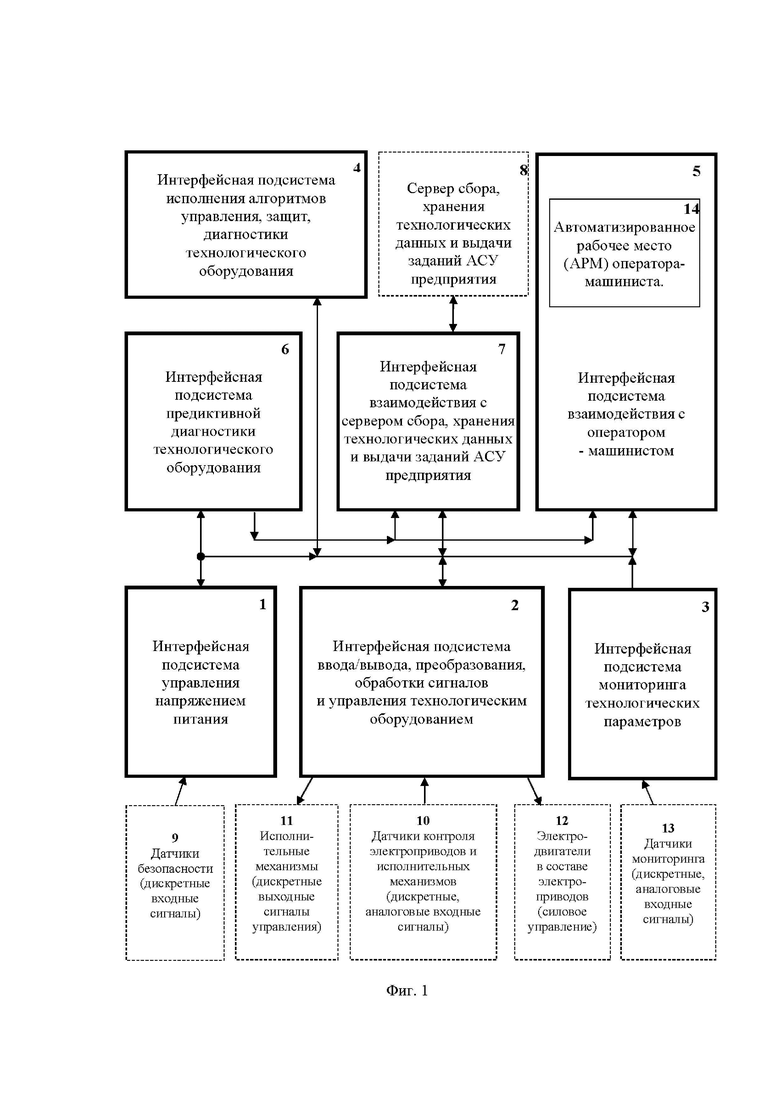
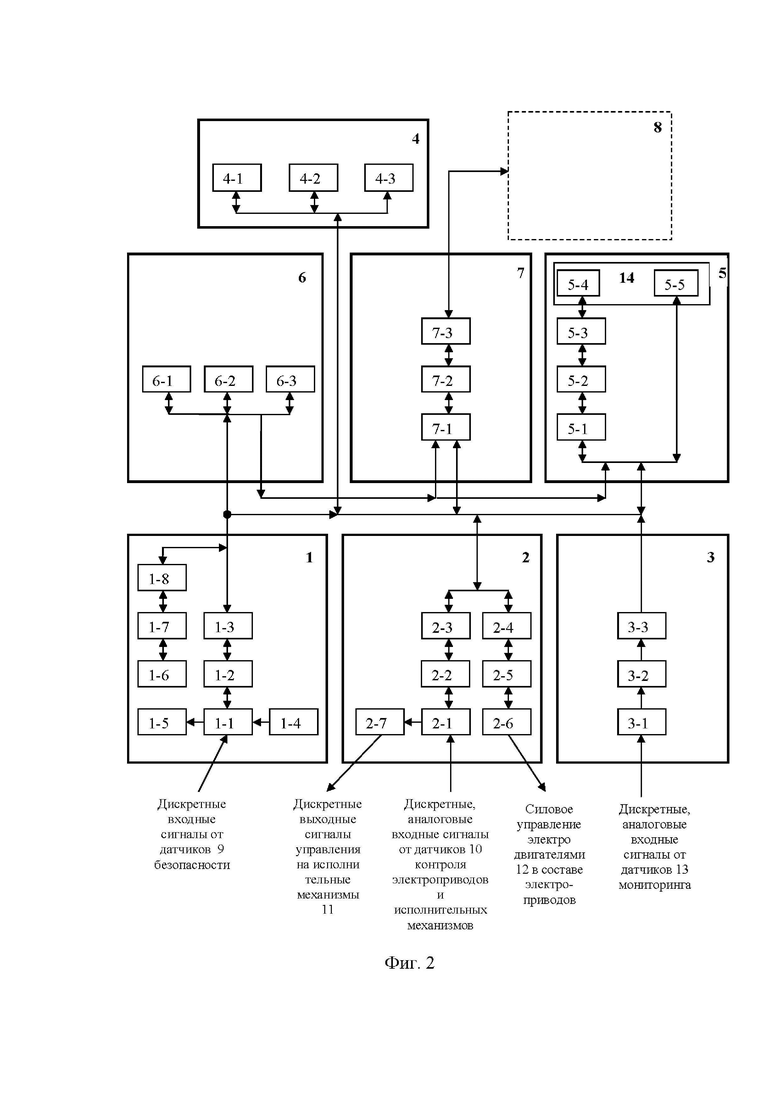
Сущность технического решения поясняется примером конструктивного исполнения ПТК и чертежами фиг. 1, фиг. 2, где на фиг. 1 представлена общая структурная схема ПТК на примере работы любого промышленного предприятия, на фиг. 2 – структурная блок-схема ПТК.
Общая структурная схема ПТК состоит (см. Фиг.1) из семи интерфейсных подсистем на базе единого управляющего микропроцессорного контроллера, программное обеспечение которого имеет модульную структуру, соответствующую механизмам и функциям подъёмно-транспортного механизма: интерфейсной подсистемы 1 управления напряжением питания (далее – интерфейсная подсистема 1), интерфейсной подсистемы 2 ввода/вывода, преобразования, обработки сигналов и управления технологическим оборудованием (далее – интерфейсная подсистема 2), интерфейсной подсистемы 3 мониторинга технологических параметров (далее – интерфейсная подсистема 3), интерфейсной подсистемы 4 исполнения алгоритмов управления, защит и диагностики технологического оборудования (далее – интерфейсная подсистема 4), интерфейсной подсистемы 5 взаимодействия с оператором-машинистом (далее – интерфейсная подсистема 5), интерфейсной подсистемы 6 предиктивной диагностики технологического оборудования (далее – интерфейсная подсистема 6), интерфейсной подсистемы 7 взаимодействия с сервером 8 сбора, хранения технологических данных и выдачи заданий АСУ предприятия (далее – интерфейсная подсистема 7), (далее –. сервером 8 АСУ предприятия). Все интерфейсные подсистемы 1-7 связаны между собой посредством аналоговых, цифровых и программно-логических каналов связи в программе единого управляющего микропроцессорного контроллера и подключены к общему двухстороннему каналу связи соответственно. Интерфейсная подсистема 1 (см. Фиг.2) включает, по меньшей мере, один аппаратный блок 1-1 ввода/вывода дискретных и аналоговых сигналов (далее – аппаратный блок 1-1), цифровые входы/выходы которого через блок интерфейса 1-2 соединены посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера с соответствующими цифровыми входами/выходами программного блока драйвера 1-3, при этом аналоговые входы аппаратного блока 1-1 соединены с соответствующими аналоговыми выходами блока 1-4 измерения напряжения и силы электрического тока силовых цепей питания технологического оборудования подъёмно-транспортного механизма (далее – блок 1-4). Дискретные выходы аппаратного блока 1-1 соединены с соответствующими дискретными входами блока 1-5 источников питания и главного контактора (далее – блок 1-5), а также блок 1-6 выпрямителя (далее – блок 1-6), цифровые входы/выходы которого через блок 1-7 управления силовой частью выпрямителя (далее – блок 1-7) соединены посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера с соответствующими цифровыми входами/выходами программного блока драйвера 1-8, причём другие цифровые входы/выходы программного блока драйвера 1-3 и программного блока драйвера 1-8 соединены соответственно с интерфейсной подсистемой 6 предиктивной диагностики технологического оборудования и со всеми остальными интерфейсными подсистемами 2-5,7 посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера. Аппаратный блок 1-1 имеет соответствующие входы для дискретных входных сигналов от соответствующих датчиков 9 безопасности технологического оборудования подъёмно-транспортного механизма посредством кабельных каналов связи. Интерфейсная подсистема 2 (см. Фиг. 2) включает, по меньшей мере, один аппаратный блок 2-1 ввода/вывода дискретных и аналоговых сигналов (далее – аппаратный блок 2-1), цифровые входы/выходы которого через блок интерфейса 2-2 соединены посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера с соответствующими цифровыми входами/выходами программного блока драйвера 2-3. Аппаратный блок 2-1 имеет дискретные выходы, которые соединены с соответствующими дискретными входами блока 2-7 управления исполнительными механизмами (далее – блок 2-7), и блок 2-6 силовой части с возможностью формирования посредством силового управления напряжением, заданной амплитуды и частоты, на электродвигателе (далее – блок 2-6), соответствующие цифровые входы/выходы которого посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера через блок 2-5 управления блоком 2-6 силовой части (далее – блок 2-5) соединены с соответствующими цифровыми входами/выходами программного блока драйвера 2-4, причём другие цифровые входы/выходы указанных программных блоков драйверов 2-3, 2-4 соединены соответственно с интерфейсной подсистемой 7 взаимодействия с сервером 8 сбора, хранения технологических данных и выдачи заданий АСУ предприятия (далее – сервер 8) и со всеми остальными интерфейсными подсистемами 1,3-6 посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера. Аппаратный блок 2-1 имеет соответствующие входы для дискретных, аналоговых входных сигналов от соответствующих датчиков 10 контроля электроприводов и исполнительных механизмов подъёмно-транспортного механизма (далее – датчики 10 контроля). Блок 2-7 имеет соответствующие выходы для дискретных выходных сигналов управления исполнительными механизмами 11 подъёмно-транспортного механизма и блок 2-6 силовой части имеет соответствующие выходы силового управления соответствующими электродвигателями 12 в составе электроприводов подъёмно-транспортного механизма посредством силовых кабельных каналов. Интерфейсная подсистема 3 (см. Фиг.2) включает, по меньшей мере, один аппаратный блок 3-1 ввода/вывода дискретных и аналоговых сигналов (далее – аппаратный блок 3-1), цифровые выходы которого через блок интерфейса 3-2 посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера соединены с соответствующими цифровыми входами программного блока драйвера 3-3, цифровые выходы которого соединены соответственно с интерфейсной подсистемой 5 и со всеми остальными интерфейсными подсистемами 1,2,4,6,7 посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера. Аппаратный блок 3-1 имеет соответствующие входы для дискретных, аналоговых входных сигналов от соответствующих датчиков 13 мониторинга внешних параметров безопасности и состояния подъёмно-транспортного механизма (далее – датчики 13 мониторинга) посредством кабельных каналов связи. Интерфейсная подсистема 4 (см. Фиг.2) включает программный блок 4-1 исполнения алгоритмов управления ПТК (далее – программный блок 4-1), связанный посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера с программным блоком 4-2 исполнения алгоритмов технологических защит (далее – программный блок 4-2) и программным блоком 4-3 исполнения алгоритмов технологической диагностики (далее – программный блок 4-3), соответствующие цифровые входы/выходы которых связаны между собой, с интерфейсной подсистемой 6 и со всеми остальными интерфейсными подсистемами 1-3,5,7 посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера. Интерфейсная подсистема 5 (см. Фиг.2) включает программный блок драйвера 5-1, соответствующие цифровые входы/выходы которого через блок интерфейса 5-2 посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера соединены с соответствующими цифровыми входами/выходами, по меньшей мере, одного аппаратного блока 5-3 ввода/вывода дискретных и аналоговых сигналов управления подъёмно-транспортным механизмом со стороны оператора-машиниста (далее – аппаратный блок 5-3) и посредством физических сигналов связаны соответственно с блоком 5-4 взаимодействия с оператором-машинистом (далее – блок 5-4) и, связанным с упомянутым блоком драйвера 5-1, блоком 5-5 отображения информации о состоянии технологического оборудования подъёмно-транспортного механизма (далее – блок 5-5) посредством цифровых сигналов соответственно. Блок 5-4 и блок 5-5 выполнены в виде, по меньшей мере, одного автоматизированного рабочего места 14 оператора-машиниста (АРМ 14), получающего соответствующие физические сигналы ввода/вывода и сигналы, передаваемые по цифровым каналам связи, при этом соответствующие цифровые входы/выходы блока 5-5 и программного блока драйвера 5-1 связаны соответственно с интерфейсной подсистемой 3 и со всеми остальными интерфейсными подсистемами 1,2,4,6,7 посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера. Аппаратный блок 5-3 имеет соответственно аналоговые и цифровые входы/выходы для связи с АРМ 14 подъёмно-транспортного механизма посредством физических и цифровых каналов связи, соответственно. Интерфейсная подсистема 6 (см. Фиг.2) включает программный блок 6-1 вычисления теоретического остаточного ресурса механического и электрического оборудования подъёмно-транспортного механизма (далее – программный блок 6-1) с возможностью расчёта с использованием математической модели износа, на вход которой в режиме реального времени поступают соответствующие измеренные и вычисленные параметры, характеризующие нагрузку, возникающую в процессе работы технологического оборудования подъёмно-транспортного механизма и интенсивность его использования, программный блок 6-2 вибродиагностики (далее – программный блок 6-2) с возможностью определения текущего состояния технологического оборудования подъёмно-транспортного механизма, скорости его изменения для выявления состояний, требующих немедленного реагирования, и программный блок 6-3 планирования сервисного обслуживания (далее – программный блок 6-3) с возможностью формирования перечня технологического оборудования и вида проводимого сервисного обслуживания с целью сохранения ресурса механического и электрического оборудования подъёмно-транспортного механизма в целом. Все указанные программные блоки имеют цифровые входы/выходы, которые связаны соответственно между собой посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера. При этом результаты расчётов в указанных программных блоках в режиме реального времени поступают соответственно в интерфейсную подсистему 5 и интерфейсную подсистему 7 посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера ПТК. Интерфейсная подсистема 7 (см. Фиг.2) включает блок 7-1 сбора, предварительной обработки и накопления данных для АСУ предприятия (далее – блок 7-1), соответствующие цифровые входы/выходы которого через программный блок 7-2 обеспечения информационной безопасности (далее – программный блок 7-2), предназначенного для защиты ПТК от воздействия третьей стороны, направленного на несанкционированное получение информации о работе ПТК, возникновение сбоев в работе ПТК, несанкционированную модификацию программного обеспечения ПТК, связаны посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера с программным блоком 7-3 драйвером взаимодействия с АСУ предприятия (далее – программный блок 7-3), предназначенного для постоянной передачи или передачи по запросу (появлению связи) накопленной информации о работе технологического оборудования в АСУ предприятия. Причём программный блок 7-3 имеет соответствующие цифровые входы/выходы для связи с сервером 8 посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, а программный блок 7-1 имеет соответствующие цифровые входы/выходы для связи с интерфейсной подсистемой 6 и со всеми остальными интерфейсными подсистемами 1-5, посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера соответственно. В интерфейсной подсистеме 1, которая обеспечивает электропитанием все интерфейсные подсистемы ПТК, а также аварийные блокировки (см. Фиг.1, 2), происходит считывание аналоговых и цифровых сигналов от, по меньшей мере, одного аппаратного блока 1-1 и преобразование физических дискретных аналоговых и цифровых сигналов в логические, а также гальваническая развязка физических сигналов от внутренней цифровой шины микропроцессорного контроллера ПТК посредством цифровых программно-логических связей в программе упомянутого микропроцессорного контроллера, с помощью блоков 1-3 и 1-8 передача преобразованных цифровых сигналов в интерфейсные подсистемы 4 и 6. В блоке 1-3 взаимодействия с блоком интерфейса 1-2 происходит декодирование информации в пригодную для обработки интерфейсными подсистемами 4 и 6 форму и диагностирования состояния сигналов ввода/вывода. В блоке 1-4 происходит измерение напряжения и тока силовых цепей питания технологического оборудования подъёмно-транспортного механизма. В блоке 1-5 происходит формирование различных уровней напряжения питания, подача силового напряжения в цепи управления технологическим оборудованием подъёмно-транспортного механизма. В блоке 1-6 происходит выпрямление напряжения переменного тока и подача его на вход блоков 2-6 подъёмно-транспортного механизма (соответствующая связь не показана). Блок 1-7 предназначен для коммуникации с интерфейсными подсистемами 4 и 6 исполнения алгоритмов в программе упомянутого микропроцессорного контроллера, управляет включением/выключением блока 1-6, регулирует значение его выходного напряжения, обеспечивает защиту силовой части электроприводов подъёмно-транспортного механизма. Блок 1-8 драйвера взаимодействия с блоком 1-7 предназначен для декодирования информации в пригодную для обработки интерфейсными подсистемами 4 и 6 исполнения алгоритмов в программе упомянутого микропроцессорного контроллера форму. Управление подъёмно-транспортным механизмом производится от интерфейсной подсистемы 2 в соответствии с заданными алгоритмами управления, выполняемыми в интерфейсной подсистеме 4. При этом производится непрерывное считывание сигналов состояния технологического оборудования и мониторинг технологических параметров интерфейсными подсистемами 4 и 6. Аналоговые и цифровые сигналы, полученные от технологического оборудования (технологических исполнительных механизмов, датчиков), поступают в интерфейсную подсистему 2 (см. Фиг. 1, 2). В интерфейсной подсистеме 2, которая реализует базовые алгоритмы ввода/вывода, преобразования, обработки сигналов и управления технологическим оборудованием подъёмно-транспортного механизма (см. Фиг. 1, 2) осуществляется циклическая обработка информации в режиме реального времени, а именно, в аппаратном блоке 2-1 происходит преобразование электрических сигналов (значений напряжения или тока) в формат представления данных для блока интерфейса 2-2. Блок интерфейса 2-2 предназначен для передачи информации в кодированном виде в интерфейсные подсистемы 4 и 5 исполнения алгоритмов в программе упомянутого микропроцессорного контроллера ПТК, а также в интерфейсную подсистему 7. Блок 2-3 драйвера взаимодействия с блоком интерфейса 2-2 предназначен для декодирования информации в форму, пригодную для обработки интерфейсными подсистемами 4 и 5 в программе упомянутого микропроцессорного контроллера ПТК, и диагностирования состояния сигналов ввода/вывода. В блоке 2-4 драйвера взаимодействия с блоком 2-5 происходит декодирование информации в форму, пригодную для обработки интерфейсными подсистемами 4, 5 в программе упомянутого микропроцессорного контроллера ПТК, и диагностирования состояния сигналов ввода/вывода. В блоке 2-5 происходит расчёт требуемых значений частоты и амплитуды питающего напряжения электродвигателя подъёмно-транспортного механизма. Блок 2-6 управляется в программе упомянутого микропроцессорного контроллера ПТК от блока 2-5 и предназначен для формирования напряжения заданной амплитуды и частоты на электродвигателе подъёмно-транспортного механизма. Блок 2-7 предназначен для управления по командам от аппаратного блока 2-1 электромеханическими тормозами, вентиляторами принудительного охлаждения двигателей и прочими устройствами. Посредством программных блоков 2-3 и 2-4 интерфейсной подсистемы 2 обработанная информация о состоянии технологического оборудования непрерывно передается в программные блоки 4-2, 6-2, 5-1, 7-2 и блок 5-5 интерфейсных подсистем 4, 6, 5, 7, соответственно. В соответствии с заданными алгоритмами и полученной информацией от блока интерфейса 3-2, программные блоки 4-1, 4-2, 4-3 интерфейсной подсистемы 4 осуществляют выполнение функций технологических защит, диагностики и управления технологическим оборудованием и выработку команд управления, передаваемых на программные блоки 6-1, 5-1, 7-2 и блок 5-5. Программные блоки 1-3, 1-8, 2-3, 2-4, 3-3, 5-1, 6-1, 6-2, 6-3, 7-2, реализуют базовые типовые алгоритмы управления с контролем обратной связи, диагностикой, управлением режимами работы, формированием сообщений, организацией человеко-машинного интерфейса и выполнены в среде операционной системы упомянутого микропроцессорного контроллера ПТК. Программные блоки 4-1, 4-2, 4-3 интерфейсной подсистемы 4 в соответствии с заданными алгоритмами осуществляют функцию общей координации и взаимосвязанного управления технологическим оборудованием, получая информацию от программных блоков 1-3, 1-8, 2-3, 2-4, 3-3 интерфейсных подсистем 1, 2, 3, соответственно, и воздействуют на программный блок 7-1. Программный блок 7-1 интерфейсной подсистемы 7 получает информацию о работе всех блоков интерфейсной подсистемы 2 и посредством программного блока 7-3 передает информацию на сервер 8 АСУ предприятия. В интерфейсной подсистеме 7 программный блок 7-1 связан с программным блоком 7-3 посредством программных логических связей в программе упомянутого микропроцессорного контроллера ПТК и с сервером 8 АСУ предприятия, например, посредством цифрового канала связи Ethernet, Profinet, Profibus, Modbus. В интерфейсной подсистеме 3, которая реализует базовые алгоритмы мониторинга технологических параметров (см. Фиг. 1, 2) от датчиков 13 мониторинга, например, датчиков вибрации, температуры воздуха, скорости ветра, массы груза и состояния подъемно-транспортного механизма, посредством, по меньшей мере, одного аппаратного блока 3-1 происходит преобразование электрических сигналов (значений напряжения или тока) в формат представления данных для блока интерфейса 3-2. Блок интерфейса 3-2 предназначен для передачи информации в кодированном виде в интерфейсные подсистемы 4 и 5, а также в интерфейсные подсистемы 6 и 7. Программный блок 3-3 драйвера взаимодействия с блоком интерфейса 3-2 предназначен для раскодировки информации в форму, пригодную для обработки интерфейсными подсистемами 4 и 5 и диагностирования состояния входных сигналов, а также интерфейсной подсистемой 6. В интерфейсной подсистеме 4, которая реализует исполнение алгоритмов управления, защит и диагностики технологического оборудования (см. Фиг.1, 2), посредством программных блоков 4-1, 4-2, 4-3, выполненных в виде функциональных программных блоков, происходит передача команд управления от блоков 2-3, 2-4 интерфейсной подсистемы 2 на блоки 2-6, 2-7 дискретного и аналогового вывода управляющих сигналов. Программный блок 4-1 исполнения алгоритмов управления предназначен для управления подъемно-транспортным механизмом и формирует управляющие сигналы для блоков 1-7, 1-3, 2-2, 2-5, 3-2 интерфейсных подсистем 1, 2, 3. Программный блок 4-2 технологических защит получает информацию о состоянии технологического оборудования, датчиков и исполнительных устройств от блоков 1-7, 1-2, 2-2, 2-5, 3-2. В случае, если в работе подъемно-транспортного механизма фиксируются отклонения, могущие привести к отказу электрооборудования системы, разрушению технологического оборудования или угрозе жизни и здоровью персонала, программный блок 4-2 экстренно и безопасно завершает работу механизмов и переводит их в безопасное состояние. Программный блок 4-3 исполнения алгоритмов технологической диагностики предназначен для проведения оценки состояния технологического оборудования подъемно-транспортного механизма в реальном времени, и извещения сервисного персонала об отказе любого из блоков интерфейсных подсистем 1-7. Обработанная информация о состоянии технологического оборудования непрерывно передается в программные блоки 4-1, 4-3 и программный блок 4-2. В соответствии с заданными алгоритмами в программе упомянутого микропроцессорного контроллера ПТК и полученной информацией от программного блока драйвера 3-3 интерфейсной подсистемы 3, программные блоки 4-1, 4-2, 4-3 осуществляют выполнение функций технологических защит, диагностики и управления технологическим оборудованием подъемно-транспортного механизма и выработку команд управления, передаваемых на блоки 1-7, 1-2, 2-2, 2-5, 3-2, 5-2, 7-2. Программный блок 4-1 реализует базовые типовые алгоритмы управления с контролем обратной связи, диагностикой, управлением режимами работы, формированием сообщений, организацией человеко-машинного интерфейса и выполнен в среде операционной системы упомянутого микропроцессорного контроллера ПТК. Программный блок 4-1 в соответствии с заданными алгоритмами осуществляет функцию общей координации и взаимосвязанного управления технологическим оборудованием, получая информацию от программных блоков 5-1 и 6-1 интерфейсных подсистем 5 и 6, соответственно, и воздействуя на программный блок 7-1. Блок 7-1 получает информацию о работе всех блоков интерфейсной подсистемы 2 и посредством программного блока 7-3 передает информацию на сервер 8 АСУ предприятия. Программный блок 7-2 связан с программным блоком 7-3 посредством программных логических связей в программе упомянутого микропроцессорного контроллера ПТК и с сервером 8 АСУ предприятия, например, посредством цифрового канала связи Ethernet. В интерфейсной подсистеме 5, которая реализует исполнение алгоритмов взаимодействия ПТК с АРМ14 (см. Фиг. 1, 2) посредством программного блока 5-1 происходит передача команд управления от блоков 2-1 и 2-5 интерфейсной подсистемы 2 на блоки 2-6 и 2-7 дискретного и силового вывода управляющих сигналов, соответственно. Программный блок 5-1 драйвера взаимодействия с блоком 5-2 интерфейса предназначен для раскодировки информации в пригодную для обработки интерфейсной подсистемой 4 форму и диагностирования состояния сигналов ввода/вывода. Блок 5-2 интерфейса связан с интерфейсной подсистемой 4 исполнения алгоритмов предназначен для передачи информации в кодированном виде в интерфейсную подсистему 4. Блок 5-3 ввода/вывода дискретных и аналоговых сигналов управления подъемно-транспортным механизмом со стороны АРМ 14 оператором-машинистом посредством физических дискретных и аналоговых управляющих сигналов имеет соответственно аналоговые и цифровые входы/выходы для связи с АРМ 14 подъемно-транспортного механизма посредством физических и цифровых каналов связи соответственно, и предназначен для преобразования электрических сигналов (значений напряжения или тока) в формат представления данных для блока 5-2. АРМ 14 выполнен, например, в виде человеко-машинного интерфейса, реализованного в виде пульта управления, который содержит панель оператора, органы управления, устройства индикации и сигнализации. Панель оператора-машиниста, например, размещена на поворотном штативе, который крепится к креслу оператора-машиниста. Органы управления (блок 5-4) и индикации (блок 5-5) вынесены на лицевую сторону тумб пульта управления с кнопками, лампами индикации, переключателями, джойстиком и графической панелью оператора-машиниста с возможностью получения и отображения технологических данных в режиме реального времени и выдачи команд управления от оператора-машиниста. В интерфейсной подсистеме 6, которая реализует исполнение алгоритмов предиктивной диагностики технологического оборудования подъемно-транспортного механизма (см. Фиг.1, 2) посредством программных блоков 6-1, 6-2, 6-3, выполненных в виде функциональных программных блоков, происходит передача команд управления от блоков 2-3, 2-4 на блоки 2-6, 2-7 дискретного и силового вывода управляющих сигналов интерфейсной подсистемы 2. Программный блок 6-1 предназначен для вычисления теоретического остаточного ресурса механического и электрического оборудования подъемно-транспортного механизма, в котором расчёт выполняется с использованием математической модели износа на вход которой поступают измеренные и вычисленные параметры, характеризующие нагрузку, возникающую в процессе работы оборудования и интенсивность его использования. Программный блок 6-2 предназначен для определения текущего состояния технологического оборудования, скорости его изменения для выявления состояний, требующих немедленного реагирования. Программный блок 6-3 предназначен для планирования сервисного обслуживания подъемно-транспортного механизма, формирования перечня оборудования и вида проводимого сервисного обслуживания с целью сохранения ресурса системы в целом. В интерфейсной подсистеме 7, которая реализует исполнение алгоритмов взаимодействия с сервером 8 сбора, хранения технологических данных и выдачи заданий АСУ предприятия (см. Фиг. 1, 2) посредством программных блоков 7-1, 7-2, 7-3, происходит передача команд управления от программного блока 7-1 интерфейсной подсистемы 7 на блоки 2-6 и 2-7. Программный блок 7-1 предназначен для сбора, предварительной обработки и накопления данных для АСУ предприятия и может быть выполнен, например, в виде программируемого логического контроллера или промышленного компьютера с программной функцией регистрации параметров работы ПТК. Программный блок 7-2 предназначен для обеспечения информационной безопасности и защиты ПТК от воздействия третьей стороны, направленного на несанкционированное получение информации о работе подъемно-транспортного механизма, на возникновение сбоев в работе подъемно-транспортного механизма, на несанкционированную модификацию программного обеспечения ПТК и может быть выполнен, например, в виде законченного аппаратного устройства или функционального программного блока шифрования. Программный блок 7-3 драйвера взаимодействия с сервером 8 АСУ предприятия предназначен для постоянной передачи/передачи по запросу (появлению связи) накопленной информации о работе подъемно-транспортного механизма в АСУ предприятия и может быть выполнен, например, в виде модема, точки доступа, оптического преобразователя.
Система контроля, управления и предиктивной диагностики технологического оборудования подъёмно-транспортного механизма с использованием ПТК на примере работы по командам управления от оператора-машиниста в режиме реального времени работает следующим образом (см. Фиг. 1, 2). Производится включение технологического оборудования. Происходят запуски источников питания и инициализация электронных частей ПТК. Производится загрузка программного обеспечения интерфейсных подсистем 1-7 из энергонезависимой памяти в рабочую память интерфейсных подсистем 1-7. Микропроцессорный контроллер ПТК переходит в режим RUN. Начинается работа всех интерфейсных подсистем 1-7. Устанавливается связь с блоками интерфейса всех интерфейсных подсистем 1-7 и блоками управления силовой частью. Устанавливается связь с сервером 8 АСУ предприятия и АРМ 14 оператора-машиниста. Оператор-машинист с помощью АРМ 14 (см. Фиг. 1, 2) и сервера 8 в интерактивном режиме выбирает на экране визуализации панели оператора требуемую мнемосхему, окно управления технологическим оборудованием и осуществляет необходимые настройки режимов работы системы управления. Начинается работа всех интерфейсных подсистем 1-7. Проверяется исправность всего диагностируемого технологического оборудования – датчиков 9 безопасности, датчиков 10 контроля, технологических исполнительных механизмов 11, электродвигателей 12 в составе электроприводов подъёмно-транспортного механизма, датчиков 13 мониторинга, при этом непрерывное диагностирование и мониторинг позволяют выявлять отказы технологического оборудования в режиме реального времени. Выбор режима управления осуществляется на АРМ 14, расположенного в кабине оператора-машиниста. После получения разрешения на проведение работ оператор-машинист подъёмно-транспортного механизма производит разблокировку системы управления ключом-маркой, входящей в состав блока 5-4 взаимодействия с оператором-машинистом. Нажатие кнопки включения подъёмно-транспортного механизма блока 5-4, при отсутствии технологических блокировок, поступающих на аппаратный блок 1-1 интерфейсной подсистемы 1 приводит к включению главного контактора блока 1-5 и блока 1-6 интерфейсной подсистемы 1. Блок 1-7 интерфейсной подсистемы 1 обеспечивает регулирование и контроль качества выходного напряжения питания блоков 2-6 интерфейсной подсистемы 2 силовой части ПТК подъёмно-транспортного механизма. После завершения переходных процессов и диагностики силового электрооборудования подъёмно-транспортного механизма программный блок 4-1 интерфейсной подсистемы 4 разблокирует работу всего технологического оборудования подъёмно-транспортного механизма и сигнализирует об их готовности включением ламп индикации, входящих в состав блока 5-4 интерфейсной подсистемы 5. ПТК переходит в состояние ожидания команд со стороны оператора-машиниста подъёмно-транспортного механизма посредством АРМ 14 интерфейсной подсистемы 5. Отклонение командоконтроллеров блока 5-4 одного из механизмов фиксируется программным блоком 4-1 интерфейсной подсистемы 4. При отсутствии технологических блокировок от аппаратного блока 2-1 интерфейсной подсистемы 2 и технологических блокировок со стороны технологического оборудования подъёмно-транспортного механизма программный блок 4-1 интерфейсной подсистемы 4 формирует управляющую команду движения выбранного оператором-машинистом подъёмно-транспортного механизма. Сигнал поступает в блок 2-5 интерфейсной подсистемы 2, который формирует и передает управляющее задание блоку 2-6 интерфейсной подсистемы 2 силовой части исполнительного механизма. Блок 2-6 интерфейсной подсистемы 2 формирует на своем выходе напряжение питания электродвигателя. После достижения предустановленного значения тока электродвигателя блок 2-5 интерфейсной подсистемы 2 формирует сигнал разжатия электромеханических тормозов для блока 2-7 управления исполнительными механизмами. После разжатия тормоза блок 2-5 начинает разгон выбранного исполнительного механизма до значения скорости, заданного оператором-машинистом подъёмно-транспортного механизма. Для завершения движения исполнительного механизма оператор-машинист возвращает командоконтроллер блока 5-4 в исходное положение. Блоки 2-5 и 2-6 интерфейсной подсистемы 2 выполняют останов электродвигателя исполнительного механизма и последующее наложение тормоза блока 2-7 интерфейсной подсистемы 2. Отключение подъёмно-транспортного механизма производится оператором-машинистом нажатием соответствующей кнопки блока 5-4 интерфейсной подсистемы 5. При этом программный блок 4-1 интерфейсной подсистемы 4 формирует сигнал отключения главного контактора подъёмно-транспортного механизма в блоке 1-5 интерфейсной подсистемы 1. В интерфейсной подсистеме 2 снимается напряжение питания блоков 2-6 силовой части механизмов и электромеханических тормозов блоков 2-7 управления исполнительными механизмами. Параллельно с исполнением основного программного обеспечения контроля и управления подъёмно-транспортным механизмом в программе микропроцессорного контроллера ПТК программным блоком 4-1 интерфейсной подсистемы 4, в интерфейсной подсистеме 6 программный блок 6-1 обеспечивает вычисление теоретического остаточного ресурса основных механических и электрических узлов технологического оборудования подъёмно-транспортного механизма. Программный блок 6-1 интерфейсной подсистемы 6 принимает следующие мгновенные измеренные величины: значения напряжения и силы тока питающей сети от блока 1-4, значение напряжения и силы тока от блока 1-7 интерфейсной подсистемы 1; значения напряжения и силы тока статора, момента силы и скорости вращения вала электродвигателя, температуры обмоток статора и ротора, мгновенных значений силы тока силовых транзисторов от блока 2-5; значений температуры масла смазки от блока 2-1 интерфейсной подсистемы 2; значение температуры окружающей среды двигателей и редукторов, скорости ветра, массы груза от блока 3-1 интерфейсной подсистемы 3, значений вибрации механического оборудования от программного блока 6-2 интерфейсной подсистемы 6. На основании полученной информации программный блок 6-1 интерфейсной подсистемы 6 производит расчёт мгновенного значения износа узлов технологического оборудования подъёмно-транспортного механизма и интегрирует вычисленные значения по времени. Результатом работы программного блока 6-1 вычисления остаточного ресурса являются расчётные значения мгновенного и накопленного износа контролируемых узлов технологического оборудования. Программный блок 6-3 планирования сервисного обслуживания технологического оборудования на основании вычисленных программным блоком 6-1 мгновенных и накопленных значений износа технологического оборудования подъёмно-транспортного механизма планирует проведение работ по восстановлению ресурса, ремонту или замене контролируемых узлов технологического оборудования. Основные измеренные и вычисленные параметры функционирования механизмов и узлов технологического оборудования подъёмно-транспортного механизма, а также мгновенные и накопленные значения износа архивируются программным блоком 7-1 сбора, предварительной обработки и накопления данных для АСУ предприятия интерфейсной подсистемой 7. При наличии или установке (в случае обмена по запросу) соединения с АСУ предприятия программный блок 7-2 обеспечения информационной безопасности производит преобразование запрошенной информации в вид, непригодный для непосредственного анализа, после чего программный блок 7-3 драйвера взаимодействия с сервером 8 АСУ предприятия осуществляет её передачу.
Предлагаемое техническое решение позволяет в режиме реального времени обеспечивать:
1. Минимизацию влияния человеческого фактора на процессы контроля, управления, сбора и обработки информации о работе ПТК.
2. Автоматическое формирование производственных отчётов, проведение анализа и сравнение с ранее полученными технологическими данными для внесения корректировок в настройки регуляторов для повышения точности, качества и безопасности ведения технологических процесса.
3. Интерактивный режим работы АСУ с использованием ПТК реализован в виде интуитивно понятного интерфейса и наличия режима подсказок, что значительно упрощает работу оператора-машиниста, а значит, повышает эффективность работы.
4. Автоматическую подготовку исходных данных для оптимизации процесса распределения загрузки по подъёмно-транспортным механизмам предприятия.
5. Автоматизированную передачу технологических данных в АСУ предприятия.
6. Защиту баз данных и программного обеспечения ПТК от несанкционированного доступа.
7. Сокращение времени на достижение и поддержание заданной производительности ПТК контроля, управления и предиктивной диагностики технологического оборудования подъёмно-транспортного механизма за счёт выполнения системы в программно-модульном исполнении.
8. Оптимальное ведение технологических работ ПТК, и за счет этого, достижение минимальных эксплуатационных расходов.
9. Предиктивную диагностику оборудования для раннего выявления и предотвращения аварийных ситуаций, защиты технологического оборудования и повышение безопасности эксплуатации подъёмно-транспортного механизма в целом.
10. Системное выполнение работ по своевременному восстановлению ресурса, ремонту или замене узлов технологического оборудования подъёмно-транспортного механизма по их состоянию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Программно-технический комплекс контроля и управления технологическими процессами в горно-обогатительном производстве | 2018 |
|
RU2698627C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОДГОТОВКОЙ ДВИГАТЕЛЬНЫХ УСТАНОВОК И ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА ТЕХНИЧЕСКОМ И СТАРТОВОМ КОМПЛЕКСАХ | 2015 |
|
RU2604362C1 |
| Способ предотвращения аварийных действий при оперативном управлении технологическим объектом | 2020 |
|
RU2758449C1 |
| СИСТЕМА ПРОСЛЕЖИВАЕМОСТИ ПРОЦЕССА ИЗГОТОВЛЕНИЯ СТЕКЛОДЕТАЛЕЙ СТЕКЛЯННЫХ ЗАКАЛЕННЫХ ЭЛЕКТРИЧЕСКИХ ИЗОЛЯТОРОВ | 2019 |
|
RU2736523C1 |
| КОМПЛЕКС ЭЛЕКТРООБОРУДОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНЫХ РЕАКТОРОВ | 2014 |
|
RU2574289C2 |
| Устройство для определения пространственных координат контролируемых элементов инженерных или природных объектов при геодезическом мониторинге в режиме реального времени в условиях экстремальных температур окружающей среды посредством навигационной аппаратуры, принимающей сигналы космических аппаратов (КА) глобальных навигационных спутниковых систем (ГНСС), включая сигналы КА ГЛОНАСС/GPS | 2021 |
|
RU2779777C1 |
| БЛОК АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ (БАР) | 2010 |
|
RU2457530C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОПЕРЕКАЧИВАЮЩИМ АГРЕГАТОМ "КВАНТ-Р" | 2017 |
|
RU2660216C1 |
| БЛОК АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МАЛОГАБАРИТНЫЙ (БАР-М) | 2012 |
|
RU2487385C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИОННЫХ СООБЩЕНИЙ В МИКРОПРОЦЕССОРНЫХ СИСТЕМАХ УПРАВЛЕНИЯ И ДИАГНОСТИКИ | 2015 |
|
RU2577196C1 |
Изобретение относится к системам управления подъёмно-транспортными механизмами промышленного назначения, а именно – к автоматизированным системам контроля, управления и предиктивной диагностики технологического оборудования подъёмно-транспортных механизмов повышенной опасности в тяжёлых условиях промышленной эксплуатации. ПТК содержит соединённые между собой посредством аналоговых, цифровых и программно-логических каналов связи в программе единого микропроцессорного контроллера интерфейсной подсистемы управления напряжением питания, интерфейсной подсистемы ввода/вывода, преобразования, обработки сигналов и управления технологическим оборудованием, интерфейсной подсистемы мониторинга технологических параметров, интерфейсной подсистемы исполнения алгоритмов управления, защит и диагностики технологического оборудования, интерфейсной подсистемы взаимодействия с оператором-машинистом, интерфейсной подсистемой предиктивной диагностики технологического оборудования и интерфейсной подсистемой взаимодействия с сервером сбора, хранения технологических данных и выдачи заданий от АСУ предприятия, которые подключены к общему двухстороннему каналу связи посредством цифровых программно-логических каналов связи в программе микропроцессорного контроллера. Достигается повышение эффективности и надёжности работы программно-технического комплекса (ПТК) в процессе контроля, управления и предиктивной диагностики технологического оборудования подъёмно-транспортного механизма в тяжёлых условиях промышленной эксплуатации. 2 ил.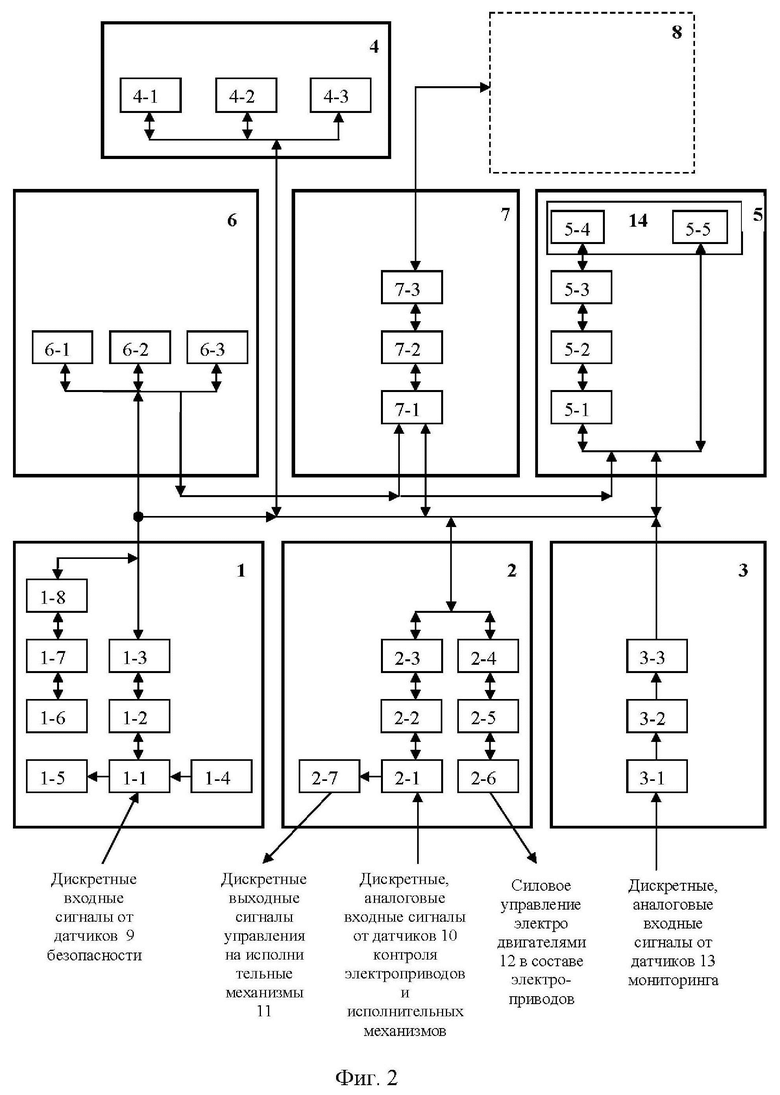
Программно-технический комплекс контроля, управления и предиктивной диагностики технологического оборудования подъёмно-транспортного механизма (ПТК), содержащий блок ввода и распределения напряжения питания, управляющий блок, выполненный на базе единого управляющего микропроцессорного контроллера, программное обеспечение которого имеет модульную структуру, соответствующую механизмам и функциям подъёмно-транспортного механизма, блоки шифрации и дешифрации аналоговых и цифровых сигналов, блоки управления электроприводами, блок определения условий работы подъёмно-транспортного механизма, блок диагностики, настройки и управления режимами работы подъёмно-транспортного механизма, блок взаимодействия с оператором, при этом все указанные блоки подключены к общему двухстороннему каналу связи, отличающийся тем, что все указанные блоки ПТК выполнены в виде соединённых между собой посредством аналоговых, цифровых и программно-логических каналов связи в программе упомянутого микропроцессорного контроллера соответственно интерфейсной подсистемы управления напряжением питания, интерфейсной подсистемы ввода/вывода, преобразования, обработки сигналов и управления технологическим оборудованием, интерфейсной подсистемы мониторинга технологических параметров, интерфейсной подсистемы исполнения алгоритмов управления, защит и диагностики технологического оборудования и интерфейсной подсистемы взаимодействия с оператором-машинистом, причём указанный ПТК дополнительно снабжён интерфейсной подсистемой предиктивной диагностики технологического оборудования и интерфейсной подсистемой взаимодействия с сервером сбора, хранения технологических данных и выдачи заданий от автоматизированной системы управления (АСУ) предприятия, которые также подключены к общему двухстороннему каналу связи посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, при этом на базе единого управляющего микропроцессорного контроллера, программное обеспечение которого имеет модульную структуру, соответствующую механизмам и функциям подъёмно-транспортного механизма, выполнен указанный ПТК, при этом указанная интерфейсная подсистема управления напряжением питания включает по меньшей мере один аппаратный блок ввода/вывода дискретных и аналоговых сигналов, цифровые входы/выходы которого через блок интерфейса соединены посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера с соответствующими цифровыми входами/выходами программного блока драйвера, при этом аналоговые входы указанного аппаратного блока ввода/вывода соединены с соответствующими аналоговыми выходами блока измерения напряжения и силы электрического тока силовых цепей питания технологического оборудования подъёмно-транспортного механизма, дискретные выходы указанного аппаратного блока ввода/вывода соединены с соответствующими дискретными входами блока источников питания и главного контактора, а также блок выпрямителя, цифровые входы/выходы которого через блок управления силовой частью выпрямителя соединены посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера с соответствующими цифровыми входами/выходами программного блока драйвера, причём другие цифровые входы/выходы указанных программных блоков драйверов соединены соответственно с интерфейсной подсистемой предиктивной диагностики технологического оборудования и со всеми остальными указанными интерфейсными подсистемами посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, причём указанный аппаратный блок ввода/вывода дискретных и аналоговых сигналов имеет соответствующие входы для дискретных входных сигналов от соответствующих датчиков безопасности технологического оборудования подъёмно-транспортного механизма, при этом указанная интерфейсная подсистема ввода/вывода, преобразования, обработки сигналов и управления технологическим оборудованием включает по меньшей мере один аппаратный блок ввода/вывода дискретных и аналоговых сигналов, цифровые входы/выходы которого через блок интерфейса соединены посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера с соответствующими цифровыми входами/выходами программного блока драйвера, при этом указанный аппаратный блок ввода/вывода дискретных и аналоговых сигналов имеет дискретные выходы, которые соединены с соответствующими дискретными входами блока управления исполнительными механизмами, и блок силовой части с возможностью формирования посредством силового управления напряжением, заданной амплитуды и частоты, на электродвигателе, соответствующие цифровые входы/выходы которого посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера через блок управления блоком силовой части соединён с соответствующими цифровыми входами/выходами программного блока драйвера, причём другие цифровые входы/выходы указанных программных блоков драйверов соединены соответственно с указанной интерфейсной подсистемой взаимодействия с сервером сбора, хранения технологических данных и выдачи заданий АСУ предприятия и со всеми остальными указанными интерфейсными подсистемами посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, причём указанный аппаратный блок ввода/вывода дискретных и аналоговых сигналов имеет соответствующие входы для дискретных, аналоговых входных сигналов от соответствующих датчиков контроля электроприводов и исполнительных механизмов подъёмно-транспортного механизма, блок управления исполнительными механизмами имеет соответствующие выходы для дискретных выходных сигналов управления исполнительными механизмами подъёмно-транспортного механизма и блок силовой части имеет соответствующие выходы для силового управления соответствующими электродвигателями в составе электроприводов подъёмно-транспортного механизма посредством силовых кабельных каналов, при этом указанная интерфейсная подсистема мониторинга технологических параметров включает по меньшей мере один аппаратный блок ввода/вывода дискретных и аналоговых сигналов, цифровые выходы которого через блок интерфейса посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера соединены с соответствующими цифровыми входами программного блока драйвера, цифровые выходы которого соединены соответственно с указанной интерфейсной подсистемой взаимодействия с оператором-машинистом и со всеми остальными указанными интерфейсными подсистемами посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, причём указанный аппаратный блок ввода/вывода дискретных и аналоговых сигналов имеет соответствующие входы для дискретных, аналоговых входных сигналов от соответствующих датчиков мониторинга внешних параметров безопасности и состояния подъёмно-транспортного механизма, при этом указанная интерфейсная подсистема исполнения алгоритмов управления, защит и диагностики технологического оборудования включает программный блок исполнения алгоритмов управления ПТК, связанный посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера с программным блоком исполнения алгоритмов технологических защит и программным блоком исполнения алгоритмов технологической диагностики, соответствующие цифровые входы/выходы которых связаны соответственно между собой, с указанной интерфейсной подсистемой предиктивной диагностики технологического оборудования и со всеми остальными указанными интерфейсными подсистемами посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, при этом указанная интерфейсная подсистема взаимодействия с оператором-машинистом включает программный блок драйвера, соответствующие цифровые входы/выходы которого через блок интерфейса посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера соединены с соответствующими цифровыми входами/выходами по меньшей мере одного аппаратного блока ввода/вывода дискретных и аналоговых сигналов управления подъёмно-транспортным механизмом со стороны оператора-машиниста и посредством физических сигналов связаны соответственно с блоком взаимодействия с оператором-машинистом и с упомянутым блоком драйвера, блоком отображения информации о состоянии технологического оборудования подъёмно-транспортного механизма посредством цифровых сигналов соответственно, причём блок взаимодействия с оператором-машинистом и блок отображения информации о состоянии технологического оборудования подъёмно-транспортного механизма выполнены в виде по меньшей мере одного автоматизированного рабочего места (АРМ) оператора-машиниста, получающего соответствующие физические и цифровые сигналы ввода/вывода, при этом соответствующие цифровые входы/выходы блока отображения информации о состоянии технологического оборудования подъёмно-транспортного механизма и программного блока драйвера связаны соответственно с указанной интерфейсной подсистемой мониторинга технологических параметров и со всеми остальными указанными интерфейсными подсистемами посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, а указанный аппаратный блок ввода/вывода дискретных и аналоговых сигналов управления подъёмно-транспортным механизмом со стороны оператора-машиниста имеет соответственно аналоговые и цифровые входы/выходы для связи с АРМ подъёмно-транспортного механизма посредством физических и цифровых каналов связи соответственно, при этом указанная интерфейсная подсистема предиктивной диагностики технологического оборудования включает программный блок вычисления теоретического остаточного ресурса механического и электрического оборудования подъёмно-транспортного механизма с возможностью расчёта с использованием математической модели износа, на вход которой в режиме реального времени поступают соответствующие измеренные и вычисленные параметры, характеризующие нагрузку, возникающую в процессе работы технологического оборудования подъёмно-транспортного механизма, и интенсивность его использования, программный блок вибродиагностики с возможностью определения текущего состояния технологического оборудования подъёмно-транспортного механизма, скорости его изменения для выявления состояний, требующих немедленного реагирования, и программный блок планирования сервисного обслуживания с возможностью формирования перечня технологического оборудования и вида проводимого сервисного обслуживания с целью сохранения ресурса ПТК подъёмно-транспортного механизма в целом, причём все указанные программные блоки имеют цифровые входы/выходы, которые связаны соответственно между собой посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, при этом результаты расчётов в указанных программных блоках в режиме реального времени поступают соответственно в указанную интерфейсную подсистему взаимодействия с оператором-машинистом и в указанную интерфейсную подсистему взаимодействия с сервером сбора, хранения технологических данных и выдачи заданий АСУ предприятия посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, при этом указанная интерфейсная подсистема взаимодействия с сервером сбора, хранения технологических данных и выдачи заданий АСУ предприятия включает блок сбора, предварительной обработки и накопления данных для АСУ предприятия, соответствующие цифровые входы/выходы которого через программный блок обеспечения информационной безопасности, предназначенный для защиты ПТК от воздействия третьей стороны, направленного на несанкционированное получение информации о работе ПТК, на возникновение сбоев в работе ПТК, несанкционированную модификацию программного обеспечения ПТК, связаны посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера с программным блоком драйвером взаимодействия с АСУ предприятия, предназначенного для постоянной передачи или передачи по запросу (появлению связи) накопленной информации о работе технологического оборудования в АСУ предприятия, причём программный блок драйвера взаимодействия с АСУ предприятия имеет соответствующие цифровые входы/выходы для связи с сервером сбора, хранения технологических данных и выдачи заданий АСУ предприятия посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера, а программный блок сбора, предварительной обработки и накопления данных для АСУ предприятия имеет соответствующие цифровые входы/выходы для связи с указанной интерфейсной подсистемой предиктивной диагностики технологического оборудования и со всеми остальными указанными интерфейсными подсистемами посредством цифровых программно-логических каналов связи в программе упомянутого микропроцессорного контроллера соответственно.
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 2009 |
|
RU2417937C1 |
| CN 102060238 A, 18.05.2011 | |||
| CN 101168426 B, 06.10.2010 | |||
| МАГНИТНЫЙ КАНАЛ | 1965 |
|
SU189103A1 |

