Изобретение относится к области машиностроения в частности к устройствам преобразования вращательного движения в возвратно-поступательное и наоборот, и может быть использовано, например, в двигателях внутреннего сгорания, компрессорах, насосах.
Известен зубчато-рычажный преобразователь вращательного движения в возвратно-поступательное, патент №2365799 РФ [1]. Он содержит стойку, вал, несущий ведущую шестерню с внешними зубьями, колесо с внешними зубьями с эксцентрично расположенной осью, кинематическую цепь, обеспечивающую постоянное межосевое расстояние шестерни и колеса, направляющее звено, а также ведомое звено, опирающееся непосредственно или через промежуточные звенья на эксцентричную ось зубчатого колеса. Направляющее звено связано с осью колеса вращательной, а со стойкой поступательной или вращательной парой. Шестерня и колесо помимо зубчатых венцов содержат опорные дорожки качения. Кинематическая цепь выполнена в виде замкнутой системы тел качения, включающей охватывающее кольцо и дополнительные тела качения, расположенные между шестерней и кольцом. Дополнительные тела качения могут быть выполнены гладкими или зубчатыми. Для уравновешивания инерционных вращающих моментов преобразователь может состоять из двух преобразователей, расположенных на одном общем ведущем валу и установленных в противофазе. Решение направлено на увеличение частоты вращения коленчатого вала при неизменных габаритах конструкции, обеспечение расположения нескольких ведомых звеньев в одной плоскости.
Недостатками данной конструкции (патент №2365799) являются:
1. громоздкость конструкции, создающая невозможность ее полного уравновешивания;
2. в формуле изобретения написано:- «шестерня и колесо помимо зубчатых венцов содержат опорные дорожки качения, совпадающие или близкие с их начальными поверхностями». Эта фраза сама доказывает невозможность точного уравновешивания;
3. из фиг. 3 видно, что массы звеньев 5 ничем не уравновешиваются;
4. из фиг. 4 очевидно, что имеются неуравновешенные моменты;
5. на чертежах: Фиг. 1 и Фиг. 3 противоречие: условие d7/d3=2 на фиг. 1 соблюдено, а на фиг. 3 не соблюдено, что недопустимо.
Также известно «Уравновешенное устройство преобразования вращательного движения в возвратно-поступательное, и наоборот», патент 2267674(13) РФ [2]. Оно содержит корпус, в котором размещено тело вращения в виде маховика, фиксированного от смещения вдоль оси вращения, на боковой поверхности ползуна выполнена замкнутая винтовая канавка, между ползуном и телом вращения размещен поводок, одна часть которого зафиксирована в маховике, а другая часть утоплена в замкнутой винтовой канавке ползуна, поворот ползуна относительно корпуса ограничен шлицевым соединением. Сущность изобретения заключается в том, что вдоль оси вращения маховика оппозитивно ползуну размещен дополнительный ползун, аналогичный первому, при этом поводки основного и дополнительного ползунов зафиксированы в маховике со смещением, либо дополнительный ползун повернут таким образом, что при вращении маховика ползуны движутся в противоположные стороны. Технический результат заключается в уравновешивании сил инерции возвратно-поступательного движения ползунов.
Недостатками конструкции (патенту №2267674(13) РФ) являются: 1) громоздкость; 2) ползуны 4 и 5, двигаясь против друг друга в противоположные стороны, как показано на чертеже, двигаются не по одной линии, поэтому они создают неуравновешенный момент сил инерции; 3) поводки 11 и 12 неуравновешенны; 4) при достижении ползуном 4 крайнего левого положения, а ползуном 5 крайнего правого положения происходит переход поводков 11 и 12 на реверсивные ветви винтовых канавок, т.е. на ветви, имеющие обратное направление, при этом, безусловно, возникают динамические нагрузки; 5) внутренний диаметр маховика (вала маховика) не может быть слишком большим (безразмерным), т.е. он ограничивает возможности применения данного механизма по назначению.
Наиболее близким по технической сути предлагаемому в данной заявке механизму преобразования вращательного движения в возвратно-поступательное и наоборот является «Устройство преобразования вращательного движения в возвратно-поступательное и наоборот» (патент 2471099 РФ [3]). Суть этого изобретения в нижеследующем. Устройство содержит неподвижное зубчатое колесо внутреннего зацепления, водило, раму, по две штуки с соответственно равными между собой массами: сателлитов, дисков, шатунов и поршней. К сателлитам жестко присоединены диски. Числа зубьев каждого сателлита в два раза меньше числа зубьев неподвижного зубчатого колеса внутреннего зацепления. В возвратно-поступательных точках дисков к ним шарнирно присоединены шатуны, на вторых своих концах шарнирно присоединены с поршнями. Центры тяжести масс шатунов и поршней постоянно, а именно в покое и в движении в пространстве, взаимно друг друга уравновешивают. На равных расстояниях от оси вращения водила на обоих концах его находятся оси вращения сателлитов и жестко присоединенными к ним дисков для взаимного уравновешивания вращательных масс.
Недостатками данной конструкции (патент 2471099 РФ [3]) являются большая длина каждого шатуна: 2R плюс расстояние, равное двум толщинам обода неподвижного зубчатого колеса, и еще раз плюс 2R неподвижного зубчатого колеса; 2) сложная конфигурация шатунов - по горизонтальной линии их следует изготовить загнутыми там, где второй раз размер 2R, чтобы расположить массы шатуна на одной линии; 3) оба шатуна в вертикальной плоскости тоже надо сделать фигурными, чтобы во время их работы не застопорились, встретившись с продолжением водила. Из отмеченных недостатков видно, что вес шатунов возрастает значительно, а также возникают сложности расположения их центров масс на одной линии.
В качестве ближайшего аналога (прототипа) выбрано устройство преобразования вращательного движения в возвратно-поступательное и наоборот, патент RU №2499934 С2 МПК F16H 19/02, F16H 21/16, опубл. 27.11.2013, Бюл. №22. Прототип содержит по две штуки валов, поршней, цилиндрических колес внешнего зацепления, неподвижных зубчатых колес внутреннего зацепления, сателлитов, к каждому сателлиту жестко присоединена планка. В возвратно-поступательных точках планок к ним шарнирно присоединены шатуны, которые вторыми своими концами шарнирно соединены с поршнями. На продолжении водил установлены корректирующие массы. Изобретение позволяет улучшить динамические качества механизма, повысить его долговечность, надежность, производительность.
К недостаткам ближайшего аналога (прототипа) следует отнести то, что там решены проблемы уравновешивания, повышения КПД, прочности, долговечности, понижения расхода горюче-смазочных материалов и т.д. только для двухцилиндровых устройств, а не десятицилиндрового механизма преобразования вращательного движения в возвратно-поступательное и наоборот. Кроме того, прототип развивает мощность в пять раза меньше, чем предлагаемый в данной заявке на изобретение механизм.
Устранение перечисленных недостатков решается в заявке на изобретение десятицилиндрового механизма преобразования вращательного движения в возвратно-поступательное и наоборот.
Технической задачей изобретения является безотказная работа, полная динамическая уравновешенность десятицилиндрового механизма преобразования вращательного движения в возвратно-поступательное и наоборот, понижение коэффициента трения, предотвращение заклинивания, повышение мощности, прочности, долговечности, КПД, понижение расхода материалов.
Поставленная задача решается развитием идей, заложенных в прототипе, а именно заменой коленчатых валов простыми круглыми, полным уравновешиванием моментов сил инерции шатунов путем замены их сложного плоскопараллельного движения на возвратно-поступательное, сведением углов давления шатунов на стенки цилиндров до нулей, самоуравновешиванием поступательных масс и балансировкой вращающихся масс. Разница с прототипом в том, что ниже приводится решение всех перечисленных сложных народно-хозяйственных технических проблем не для двухцилиндровых механизмов, а десятицилиндровых.
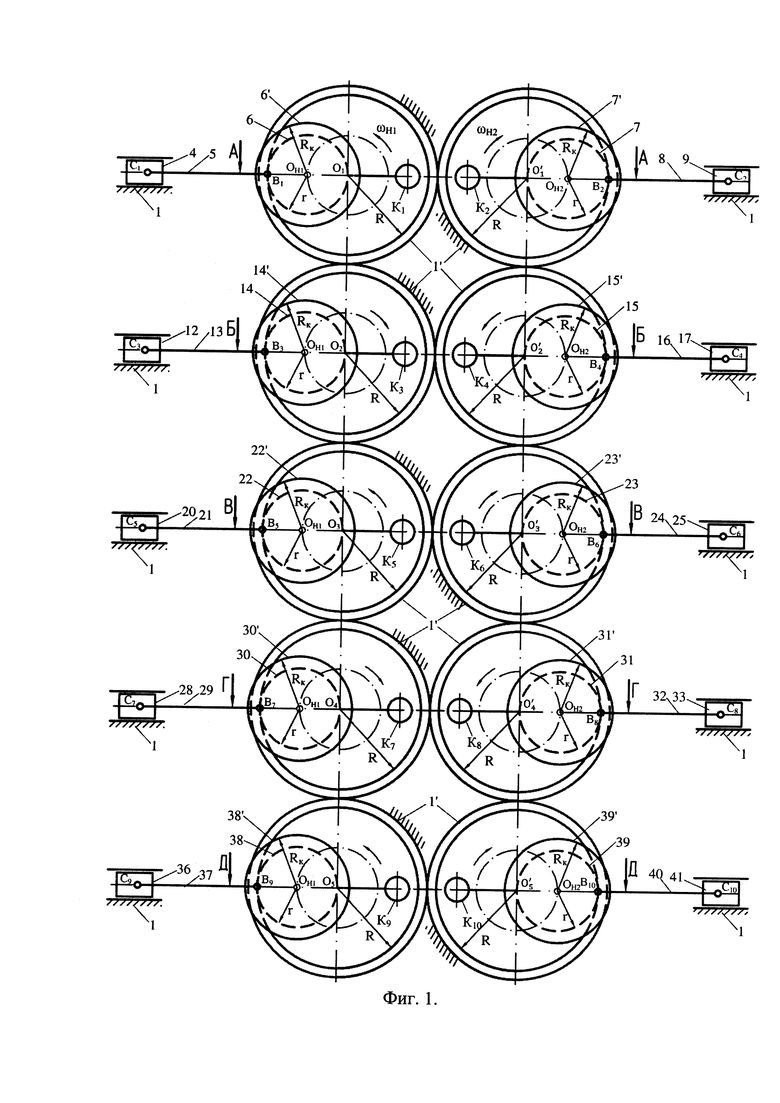
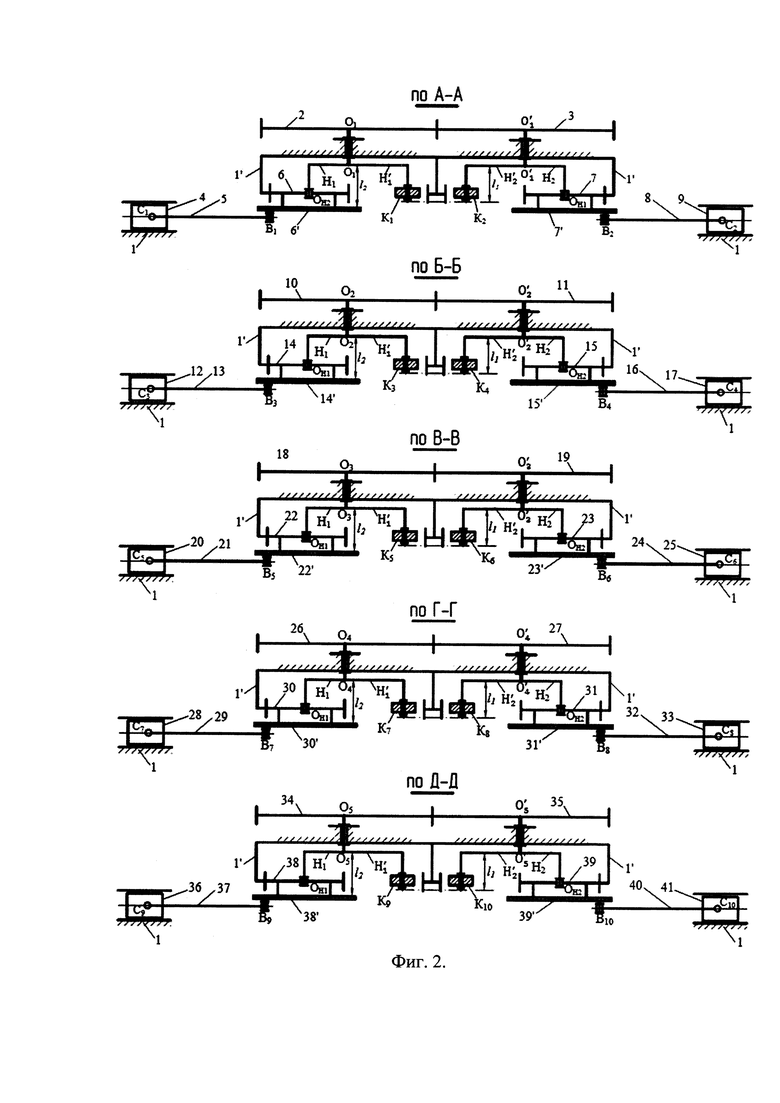
Предлагаемый десятицилиндровый механизм преобразования вращательного движения в возвратно-поступательное и наоборот представлен на чертежах: фиг. 1 - вид спереди, фиг. 2 - разрезы по А-А, по Б-Б, по В-В, по Г-Г и по Д-Д. Данный механизм содержит раму 1 (фиг. 1, 2); по десять штук одинаковых цилиндрических колес 2; 3, 10; 11, 18; 19, 26, 27, 34, 35 (фиг. 2); круглых валов: O1-O1,  , О2-О2,
, О2-О2,  , O3-O3,
, O3-O3,  , O4-O4,
, O4-O4,  , О5-О5,
, О5-О5,  (фиг. 2) и по десять штук неподвижных зубчатых колес внутреннего зацепления: 1′, 1′, 1′, 1′, 1′, 1′, 1′, 1′, 1′, 1′ (фигуры 1, 2), последовательно жестко соединенных с валами одинаковых водил: Н1, Н2 (фиг. 2 по А-А), Н1, Н2 (фиг. 2 по Б-Б), Н1, Н2 (фиг. 2 по В-В), Н1, Н2 (фиг. 2 по Г-Г), Н1, Н2 (фиг. 2 по Д-Д) и одинаковых сателлитов с жестко присоединенными к ним одинаковыми дисками (RК=RД): 6 с 6′, 7 с 7′, 14 с 14′, 15 с 15′, 22 с 22′, 23 с 23′, 30 с 30′, 31 с 31′, 38 с 38′, 39 с 39′ (фиг. 2), к возвратно-поступательно движущимся точкам дисков В1, В2, В3, В4, В5, В6, В7, В8, В9, В10 шарнирно присоединены одинаковые шатуны 5, 8, 13, 16, 21, 24, 29, 32, 37, 40 (фигуры 1, 2), к шатунам в точках С1, С2, С3, С4, С5, С6, С7, C8, С9, С10 шарнирно присоединены одинаковые поршни 4, 9, 12, 17, 20, 25, 28, 33, 36, 41 (фигуры 1, 2), корректирующие массы К1, К2, К3, К4, К5, К6, К7, К8, К9, К10, установленные на продолжениях водил
(фиг. 2) и по десять штук неподвижных зубчатых колес внутреннего зацепления: 1′, 1′, 1′, 1′, 1′, 1′, 1′, 1′, 1′, 1′ (фигуры 1, 2), последовательно жестко соединенных с валами одинаковых водил: Н1, Н2 (фиг. 2 по А-А), Н1, Н2 (фиг. 2 по Б-Б), Н1, Н2 (фиг. 2 по В-В), Н1, Н2 (фиг. 2 по Г-Г), Н1, Н2 (фиг. 2 по Д-Д) и одинаковых сателлитов с жестко присоединенными к ним одинаковыми дисками (RК=RД): 6 с 6′, 7 с 7′, 14 с 14′, 15 с 15′, 22 с 22′, 23 с 23′, 30 с 30′, 31 с 31′, 38 с 38′, 39 с 39′ (фиг. 2), к возвратно-поступательно движущимся точкам дисков В1, В2, В3, В4, В5, В6, В7, В8, В9, В10 шарнирно присоединены одинаковые шатуны 5, 8, 13, 16, 21, 24, 29, 32, 37, 40 (фигуры 1, 2), к шатунам в точках С1, С2, С3, С4, С5, С6, С7, C8, С9, С10 шарнирно присоединены одинаковые поршни 4, 9, 12, 17, 20, 25, 28, 33, 36, 41 (фигуры 1, 2), корректирующие массы К1, К2, К3, К4, К5, К6, К7, К8, К9, К10, установленные на продолжениях водил  ,
,  (фиг. 2 по А-А), , (фиг. 2 по Б-Б), , (фиг. 2 по В-В), , (фиг. 2 по Г-Г), , (фиг. 2 по Д-Д).
(фиг. 2 по А-А), , (фиг. 2 по Б-Б), , (фиг. 2 по В-В), , (фиг. 2 по Г-Г), , (фиг. 2 по Д-Д).
Поступательные массы шатунов mшi и поршней mпi, попарно соединенные друг с другом, складываются в ∑mi и находятся на одних и тех же прямых линиях на одинаковых расстояниях друг от друга. Приведем их по линиям:
На фигуре 2 по линиям С1С2, С3С4, С5С6, С7С8 и C9C10:
∑m1=mш5+mп4 и ∑m2=mш8+mп9, ∑m1=-∑m2,
∑m3=mш13+mп12 и ∑m4=mш16+mп17, ∑m3=-∑m4.
∑m5=mш21+mп20 и ∑m6=mш24+mп25, ∑m5=-∑m6,
∑m7=mш29+mп28 и ∑m8=mш32+mп33, ∑m7=-∑m8.
∑m9=mш37+mп36 и ∑m10=mш40+mп41, ∑m9=-∑m10,
где mшi - масса шатуна, i - порядковый номер шатуна,
mпi - масса поршня, i - порядковый номер поршня.
Корректирующие массы соответственно обозначены:
К1 - mК1 К2 - mК2, К3 - mК3, К4 - mК4, К5 - mК5, К6 - mК6, К7 - mК7, К8 -mК8, К9 - mК9, К10 - mК10.
На осях всех корректирующих масс нарезана резьба. Гайками они регулируются так, чтобы их центры масс и соответствующих им суммарных масс сателлитов с дисками находились на одной и той же линии противоположно друг другу. Дисбалансы сателлитов с дисками соответственно должны быть равны дисбалансам корректирующих масс.
Запишем равенства дисбалансов по фигуре 2:





где Qci - силы тяжести сателлитов, i - их порядковые номера,
Qдi - силы тяжести дисков, i - их порядковые номера,
Hi и  - плечи (фиг 2).
- плечи (фиг 2).
Во избежание заклинивания механизма длины осей корректирующих масс l1 следует проектировать меньше l2 - расстояний от горизонтальных общих линий  ,
,  до дисков (фигуры 2), т.е. l1<l2.
до дисков (фигуры 2), т.е. l1<l2.
Числа зубьев каждого сателлита 6, 7, 14, 15, 22, 23, 30, 31, 38, 39 должны быть меньше в два раза числа зубьев каждого неподвижного колеса внутреннего зацепления 1′, 1′, 1′, 1′, 1′, 1′, 1′, 1′, 1′, 1′ (фигуры 1, 2), т.е. R=2r. В результате на всех сателлитах имеются точки, точнее на их делительных окружностях, а также прямо напротив них на дисках - В1, В2, В3, В4, В5, В6, В7, В8, В9, В10, совершающие возвратно-поступательное движение в противофазе друг другу.
Одни концы шатунов 5, 8, 13, 16, 21, 24, 29, 32, 37, 40 шарнирно соединены с дисками в точках В1, В2, В3, В4, В5, В6, В7, В8, В9, В10, а в других точках С1, С2, С3, С4, С5, С6, С7, C8, С9, С10 - к поршневым пальцам.
Массы всех поршней одной величины, а также массы всех шатунов тоже одной величины, точно также между собой должны быть равны массы дисков, сателлитов. Массы все попарно между собой должны двигаться в противофазе для полного уравновешивания всего механизма.
На фигурах 1 и 2 представлен предложенный десятицилиндровый механизм преобразования вращательного движения в возвратно-поступательное и наоборот, который включает в себя:
1 - раму;
1′ - десять неподвижных одинаковых зубчатых колес внутреннего зацепления, поскольку они неподвижны, то являются как бы частью стойки, поэтому они обозначены одним номером (1′, 1′, 1′, 1′, 1′, 1′, 1′, 1′, 1′, 1′);
2 - цилиндрическое зубчатое колесо;
3 - цилиндрическое зубчатое колесо;
4 - поршень;
5 - шатун;
6 - сателлит с диском 6′;
7 - сателлит с диском 7′;
8 - шатун;
9 - поршень;
10 - цилиндрическое зубчатое колесо;
11 - цилиндрическое зубчатое колесо;
12 - поршень;
13 - шатун;
14 - сателлит с диском 14′;
15 - сателлит с диском 15′;
16 - шатун;
17 - поршень;
18 - цилиндрическое зубчатое колесо;
19 - цилиндрическое зубчатое колесо;
20 - поршень;
21 - шатун;
22 - сателлит с диском 22′;
23 - сателлит с диском 23′;
24 - шатун;
25 - поршень;
26 - цилиндрическое зубчатое колесо;
27 - цилиндрическое зубчатое колесо;
28 - поршень;
29 - шатун;
30 - сателлит с диском 30′;
31 - сателлит с диском 31′;
32 - шатун;
33 - поршень;
34 - цилиндрическое зубчатое колесо;
35 - цилиндрическое зубчатое колесо;
36 - поршень;
37 - шатун;
38 - сателлит с диском 38′;
39 - сателлит с диском 39′;
40 - шатун;
41 - поршень;
К1 - корректирующая масса;
К2 - корректирующая масса;
К3 - корректирующая масса;
К4 - корректирующая масса;
К5 - корректирующая масса;
К6 - корректирующая масса;
К7 - корректирующая масса;
К8 - корректирующая масса;
К9 - корректирующая масса;
К10 - корректирующая масса;
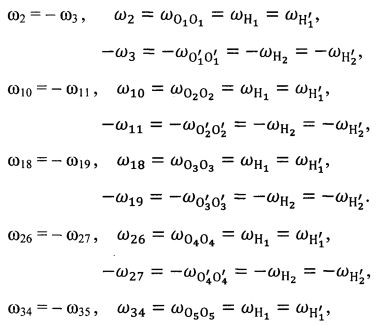
Десятицилиндровый механизм преобразования вращательного движения в возвратно-поступательное и наоборот работает следующим образом. Цилиндрические колеса 2 и 3, 10 и 11, 18 и 19, 26 и 27, 34 и 35 внешнего зацепления. Они имеют равные числа зубьев и находятся попарно в зацеплении (фигуры 1 и 2). Они попарно вращаются в противоположные стороны с равными угловыми скоростями:

Как видно из фигур 1, 2 и из приведенных угловых скоростей, валы каждого ряда: и O1O1,  , О2О2,
, О2О2,  , O3O3,
, O3O3,  , O4O4,
, O4O4,  , О5О5,
, О5О5,  (фиг. 2) вращаются в противоположные стороны и приводят в противоположное вращательные движения жестко соединенные с ними водила, сателлиты и корректирующие массы.
(фиг. 2) вращаются в противоположные стороны и приводят в противоположное вращательные движения жестко соединенные с ними водила, сателлиты и корректирующие массы.
Сателлит с диском 6 с 6′ и корректирующая масса К1, установленная на продолжении водила , вращаются с угловой скоростью ω2. В противоположную сторону им вращаются с -ω3 сателлит с диском 7 с 7′ и корректирующая масса К2, установленная на продолжениях водила .
Сателлит с диском 14 с 14′ и корректирующая масса К3, установленная на продолжении водила , вращаются с угловой скоростью ω10. В противоположную им сторону вращаются с -ω11 сателлит с диском 15 с 15′ и корректирующая масса К4, установленная на продолжении водила .
Сателлит с диском 22 с 22′ и корректирующая масса К5, установленная на продолжении водила , вращаются с угловой скоростью ω18. В противоположную им сторону вращаются с -ω19 сателлит с диском 23 с 23′ и корректирующая масса К6, установленная на продолжении водила .
Сателлит с диском 30 с 30′ и корректирующая масса К7, установленная на продолжении водила , вращаются с угловой скоростью ω26. В противоположную им сторону вращаются с -ω27 сателлит с диском 31 с 31′ и корректирующая масса К8, установленная на продолжении водила .
Сателлит с диском 38 с 38′ и корректирующая масса К9, установленная на продолжении водила , вращаются с угловой скоростью ω34. В противоположную им сторону вращаются с -ω35 сателлит с диском 39 с 39′ и корректирующая масса К10, установленная на продолжении водила .
Таким образом, центры тяжести корректирующих масс и соответствующих блоков сателлитов с дисками, дисбалансы которых рассчитаны по выше приведенным формулам, вращаются в противофазе друг с другом в одних и тех же плоскостях.
На сателлитах имеются поступательно двигающиеся точки и напротив им на дисках точки, совершающие также поступательное движение, где установлены вращательные кинематические пары, т.е. в точках В1, В2, В3, В4, В5, В6, В7, В8, В9, В10, совершающие в противофазе друг с другом возвратно-поступательные движения вместе с присоединенными к ним шатунами и поршнями. Перечислим их.
Шатун 5 с поршнем 4 по прямой линии C1C2 двигаются в противофазе шатуну 8 и поршню 9 (фиг. 2).
Шатун 13 с поршнем 12 по прямой линии С3С4 двигаются в противофазе шатуну 16 и поршню 17 (фиг. 2).
Шатун 21 с поршнем 20 по прямой линии С5С6 двигаются в противофазе шатуну 24 и поршню 25 (фиг. 2).
Шатун 29 с поршнем 28 по прямой линии С7С8 двигаются в противофазе шатуну 32 и поршню 33 (фиг. 2).
Шатун 37 с поршнем 36 по прямой линии С9С10 двигаются в противофазе шатуну 40 и поршню 41 (фиг. 2).
Как показали проведенные расчеты и опыты, экономическая эффективность десятицилиндрового механизма преобразования вращательного движения в возвратно-поступательное и наоборот заключается в безотказности работы, долговечности в связи с тем, что угол давления шатуна на стенки цилиндра равен нулю. В результате полной уравновешенности подвижных масс значительно улучшились динамические качества механизма: полное отсутствие вредных вибраций, шума, потери мощности, повышение частоты вращения, КПД и производительности. Кроме того, за счет звеньев, имеющих постоянные значения моментов инерции, увеличился маховой момент, что привело к значительному уменьшению колебаний скорости - к уменьшению коэффициента неравномерности движения 5. Использование данного механизма повысит экологичность двигателей внутреннего сгорания, а также других механизмов и машин.
Источники информации
1. Патент №2365799 РФ.
2. Патент №2267674 РФ.
3. Патент №2471099 РФ.
4. Патент №2499934 РФ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШЕСТИЦИЛИНДРОВЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2014 |
|
RU2603878C2 |
| ВОСЬМИЦИЛИНДРОВЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2014 |
|
RU2603045C2 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2013 |
|
RU2552403C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2012 |
|
RU2499934C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2010 |
|
RU2471099C2 |
| ТРЕХЦИЛИНДРОВОЕ УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2016 |
|
RU2672519C2 |
| Механизм привода ножей косилки | 1976 |
|
SU664606A1 |
| Сепаратор сыпучих материалов | 1985 |
|
SU1282828A1 |
| Зерноочистительная машина | 1980 |
|
SU852240A1 |
| Устройство для уравновешивания силиНЕРции MACC, СОВЕРшАющиХ ВОзВРАТНО- пОСТупАТЕльНОЕ дВижЕНиЕ | 1977 |
|
SU804950A1 |
Изобретение относится к области машиностроения, в частности к механизмам преобразования движения. Механизм преобразования вращательного движения в возвратно-поступательное и наоборот содержит по десять одинаковых цилиндрических колес внешнего зацепления, круглых валов, неподвижных зубчатых колес внутреннего зацепления, шатунов и поршней. Также в его состав входит по десять штук одинаковых водил и сателлитов, к которым жестко присоединены диски. Число зубьев сателлитов в два раза меньше числа зубьев неподвижных зубчатых колес внутреннего зацепления. К каждому сателлиту жестко присоединен диск. В возвратно-поступательных точках дисков к ним шарнирно присоединены шатуны, которые вторыми своими концами шарнирно соединены с поршнями. На продолжении водил установлены корректирующие массы. Достигается компактность конструкции и повышение экологичности. 2 ил.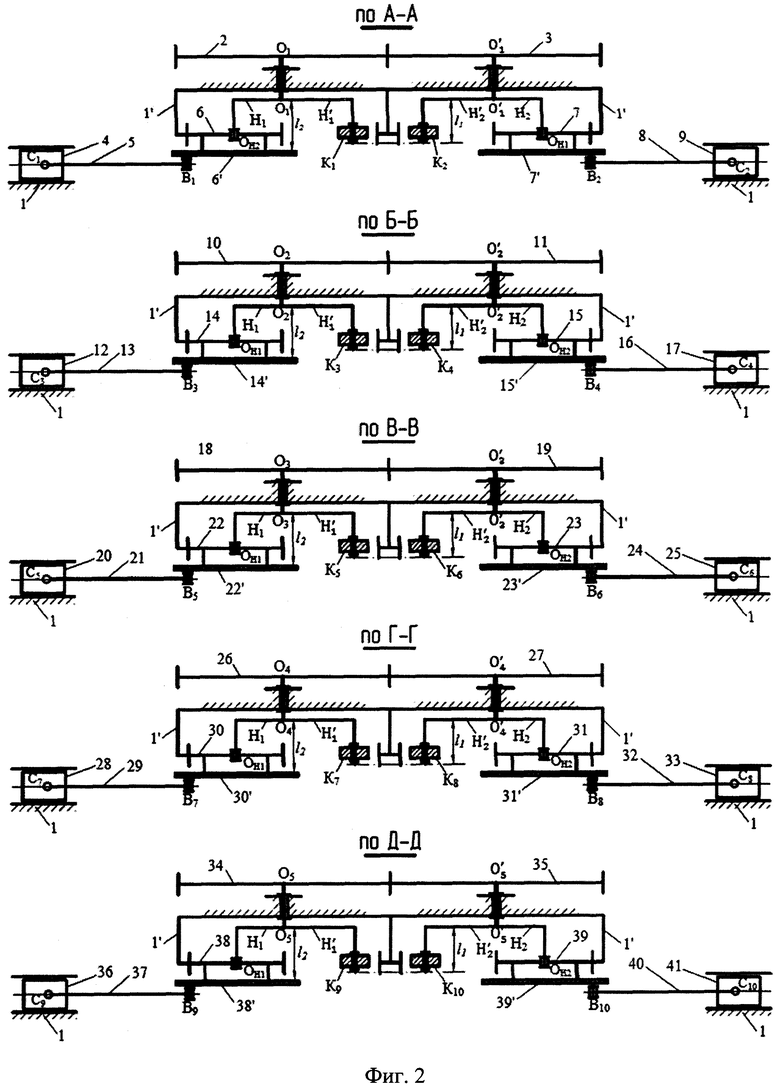
Десятицилиндровый механизм преобразования вращательного движения в возвратно-поступательное и наоборот, содержащий раму, по две штуки одинаковых неподвижных зубчатых колес внутреннего зацепления, валов, цилиндрических колес внешнего зацепления, жестко соединенных с соответствующими валами водил, шатунов, поршней, сателлитов, при этом к каждому сателлиту жестко присоединен диск, в возвратно-поступательных точках дисков к ним шарнирно присоединены одинаковые шатуны, которые противоположно расположены на одной и той же линии с присоединенными шарнирно к ним поршнями, взаимно уравновешивая друг друга, на продолжении обоих водил установлены корректирующие массы, дисбалансы которых соответственно равны дисбалансам масс сателлитов с дисками, точки нахождения центров тяжести корректирующих масс регулируются так, чтобы они лежали на одной и той же линии противоположно с центрами тяжести сателлитов с планками, полностью их уравновешивая, отличающийся тем, что дополнительно содержит восемь дисков, жестко присоединенных к каждому сателлиту и шарнирно к шатунам, а также тем, что дополнительно содержит по восемь штук одинаковых цилиндрических колес внешнего зацепления, круглых валов, неподвижных зубчатых колес внутреннего зацепления, шатунов, поршней, водил, жестко соединенных с соответствующими валами, и сателлитов, число зубьев каждого сателлита в два раза меньше числа зубьев каждого неподвижного зубчатого колеса внутреннего зацепления, в возвратно-поступательных точках дисков к ним шарнирно присоединены шатуны, которые расположены противоположно между собой на одних и тех же прямых линиях с присоединенными к ним шарнирно поршнями, взаимно уравновешивая друг друга, на продолжении водил установлены корректирующие массы, дисбалансы которых равны дисбалансам масс сателлитов с дисками, точки нахождения центров тяжести корректирующих масс регулируются так, чтобы они лежали на одних и тех же прямых линиях противоположно с центрами тяжести соответствующих им сателлитов с дисками, полностью их уравновешивая.
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2146010C1 |
| ФРИКЦИОННАЯ ПЕРЕДАЧА | 1991 |
|
RU2011069C1 |
| СИСТЕМА ИЗ ДВУХ ОБЪЕКТОВ, ШАРНИРНО СВЯЗАННЫХ МЕЖДУ СОБОЙ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ ПРИ ВРАЩАТЕЛЬНОМ ДВИЖЕНИИ | 1999 |
|
RU2207454C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2012 |
|
RU2499934C2 |
| RU 2010123163 A, 20.12.2011 | |||
| US 20110247581 A1, 13.10.2011 | |||
| ПОРШНЕВАЯ МАШИНА | 1989 |
|
RU2022118C1 |
| УСТРОЙСТВО ДЛЯ УРАВНОВЕШИВАНИЯ ПОРШНЕВОЙ МАШИНЫ | 1992 |
|
RU2018039C1 |

