Настоящее изобретение относится к способу защищенного дистанционного запуска транспортного средства и к системе для осуществления такого способа.
Изобретение относится также к транспортному средству, содержащему эту систему защищенного дистанционного запуска.
Для повышения комфорта водителей были разработаны способы и системы дистанционного запуска транспортного средства с целью обеспечения, в частности, охлаждения или обогрева салона транспортного средства, когда температура в нем является невыносимой и до управления этим транспортным средством.
Как известно, дистанционный запуск транспортного средства осуществляют при помощи устройства активации, такого как пульт дистанционного управления, например, ключ транспортного средства, снабженный нажимными кнопками и выполненный с возможностью передачи радиоэлектрического сигнала в блок управления, известный также под сокращением ВСМ ("Body Control Module" или контроллер салона). Этот блок управления при получении указанного сигнала передает команду на модуль управления двигателем для включения запуска транспортного средства.
Однако общей проблемой этих способов и систем является возможность угона злоумышленником транспортного средства, двигатель которого работает.
Для решения этой проблемы известны способы и системы дистанционного запуска, позволяющие активировать выключение двигателя, когда вторжение в транспортное средство обнаруживают датчики типа датчиков изменения объема или датчики, выполненные с возможностью обнаружения открывания двери транспортного средства или изменения угловой скорости его колеса.
Известен также документ ЕР 2313642, в котором описаны способ и система дистанционного запуска, которые предусматривают поддержание транспортного средства в режиме холостого хода двигателя и выключают последний, когда датчик обнаруживает активацию педали акселератора.
Однако основным недостатком этих способов и систем дистанционного запуска является то, что злоумышленник может легко нейтрализовать датчики, предназначенные для обеспечения зашиты транспортного средства, когда его двигатель работает.
Настоящее изобретение направлено на решение этих проблем, связанных с указанными недостатками известных решений, и предложить способ и систему защищенного дистанционного запуска, которые являются надежными и простыми в применении.
Объектом изобретения является способ защищенного дистанционного запуска транспортного средства, содержащий следующие этапы:
- активация запуска двигателя транспортного средства;
- отслеживание события, включающее в себя:
• определение изменения крутящего момента за интервал времени анализа на основании сигналов управления, связанных с командами запроса крутящего момента, поступающих от модуля регулирования холостого хода двигателя;
• сравнение определенного изменения крутящего момента с пороговым значением крутящего момента, и
- срабатывание выключения двигателя, когда определенное изменение крутящего момента превышает или равно пороговому значению крутящего момента.
В других вариантах осуществления:
- этап определения изменения крутящего момента осуществляют между по меньшей мере первой совокупностью крутящих моментов, запрошенных за первый интервал времени, и по меньшей мере второй совокупностью крутящих моментов, запрошенных за второй интервал времени;
- первый и второй интервалы времени следуют друг за другом;
- способ предусматривает повторение этапа отслеживания с частотностью, которую можно программировать;
- на этапе определения применяют алгоритм типа метода трапеций или метода прямоугольников;
- интервал времени анализа по существу равен сумме первого и второго интервалов времени;
- пороговое значение крутящего момента программируют в зависимости от отслеживаемого события; и
- событие соответствует троганию с места транспортного средства при помощи сцепления или троганию с места транспортного средства при приложении заданного значения крутящего момента, определяемого по нажатию на педаль акселератора.
Объектом изобретения является также система защищенного дистанционного запуска транспортного средства для осуществления такого способа, содержащая модуль управления двигателем, выполненный с возможностью запуска или выключения двигателя транспортного средства, при этом система содержит:
- модуль отслеживания изменения крутящего момента за интервал времени анализа на основании сигналов управления, связанных с командами запроса крутящего момента, и
- модуль регулирования холостого хода двигателя, выполненный с возможностью подачи указанных сигналов,
при этом модуль отслеживания связан с модулем управления двигателем и с модулем регулирования холостого хода.
Предпочтительно модуль отслеживания содержит аппаратные и программные средства, выполненные с возможностью отслеживания события, в частности, трогания с места транспортного средства при помощи сцепления или трогания с места транспортного средства при приложении заданного значения крутящего момента, определяемого по нажатию на педаль акселератора.
Объектом изобретения является также транспортное средство, содержащее такую систему защищенного дистанционного запуска.
Одним из преимуществ изобретения является возможность обнаружения перемещения транспортного средства, в частности, во время его трогания с места при помощи сцепления.
Другие преимущества и отличительные признаки изобретения будут более очевидны из нижеследующего описания предпочтительного варианта выполнения, представленного в качестве не ограничительного примера со ссылками на прилагаемые фигуры, на которых:
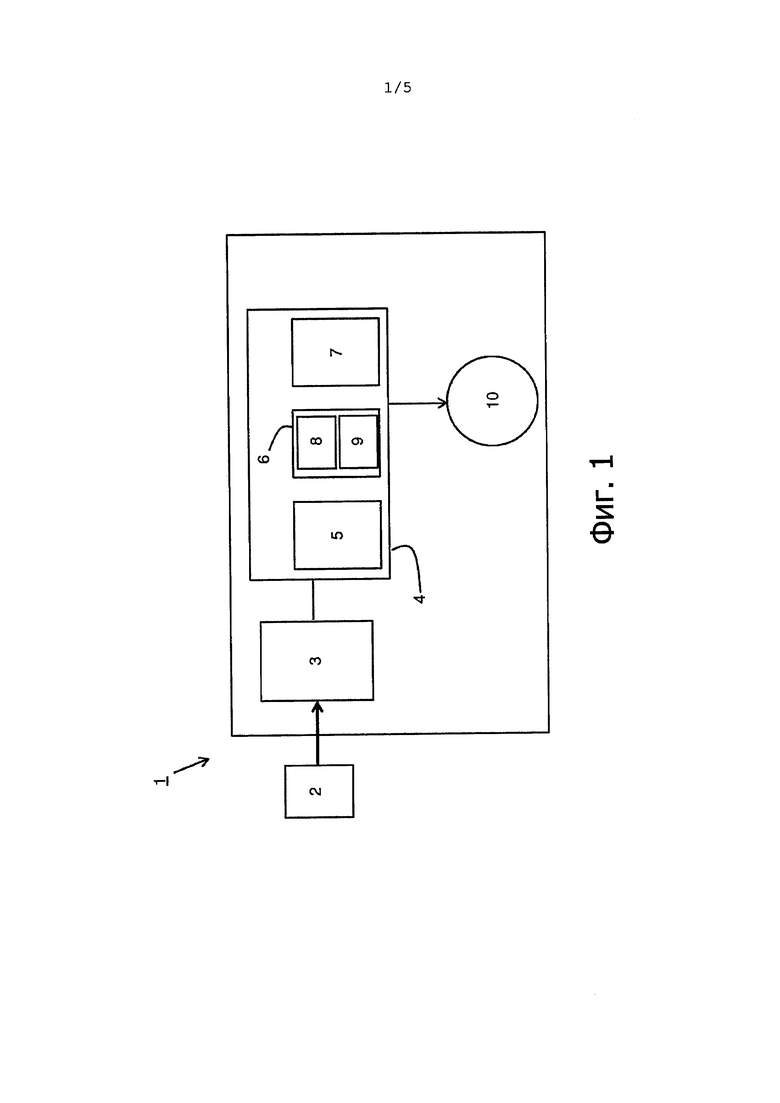
Фиг. 1 - схема системы защищенного дистанционного запуска транспортного средства согласно варианту выполнения изобретения.
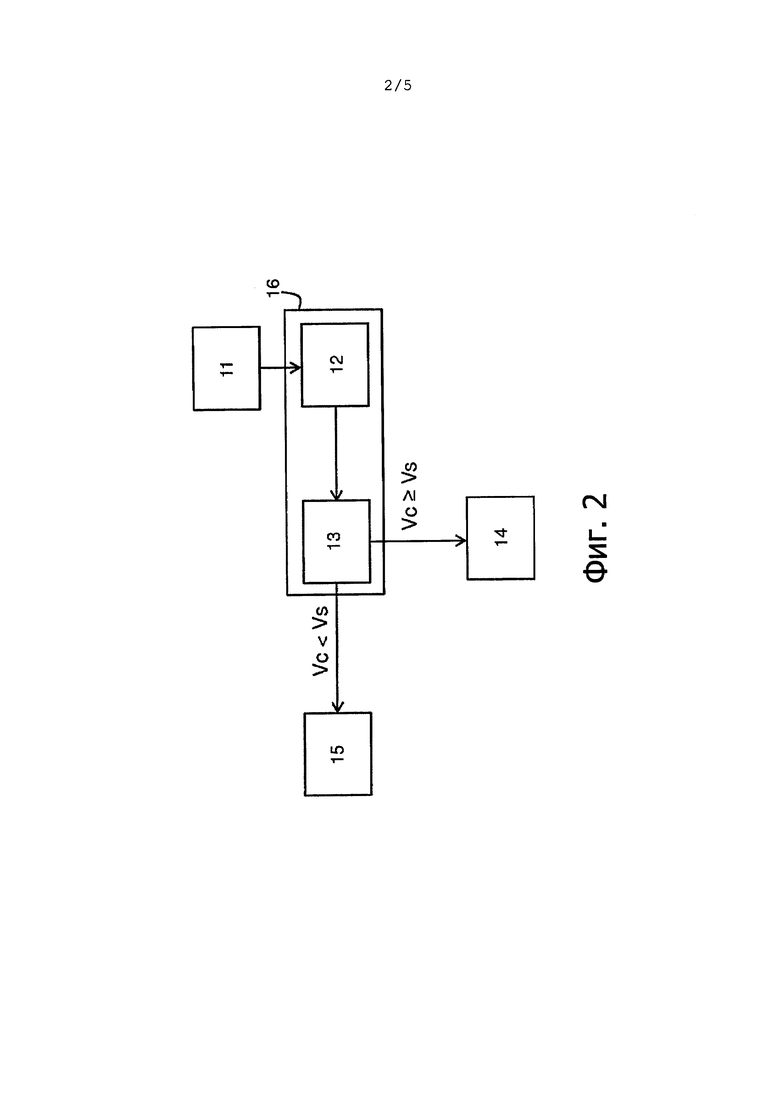
Фиг. 2 - блок-схема способа защищенного дистанционного запуска согласно варианту выполнения изобретения.
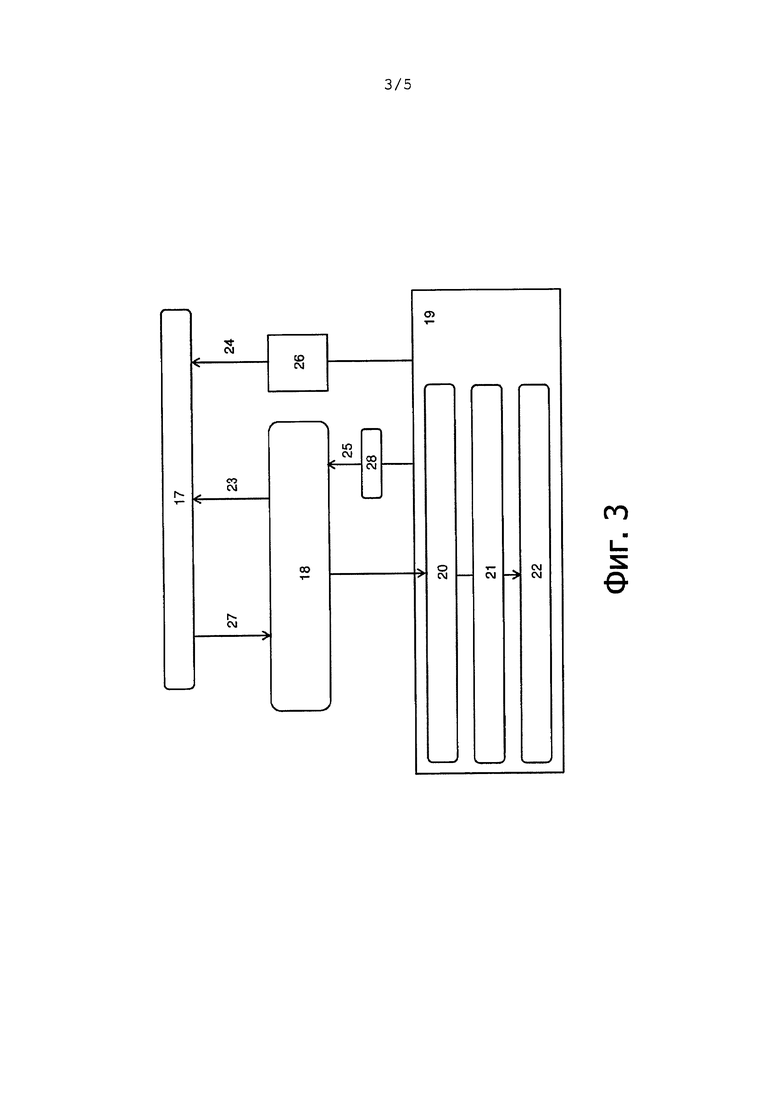
Фиг. 3 - логическая диаграмма этапа активации дистанционного запуска транспортного средства согласно варианту выполнения изобретения.
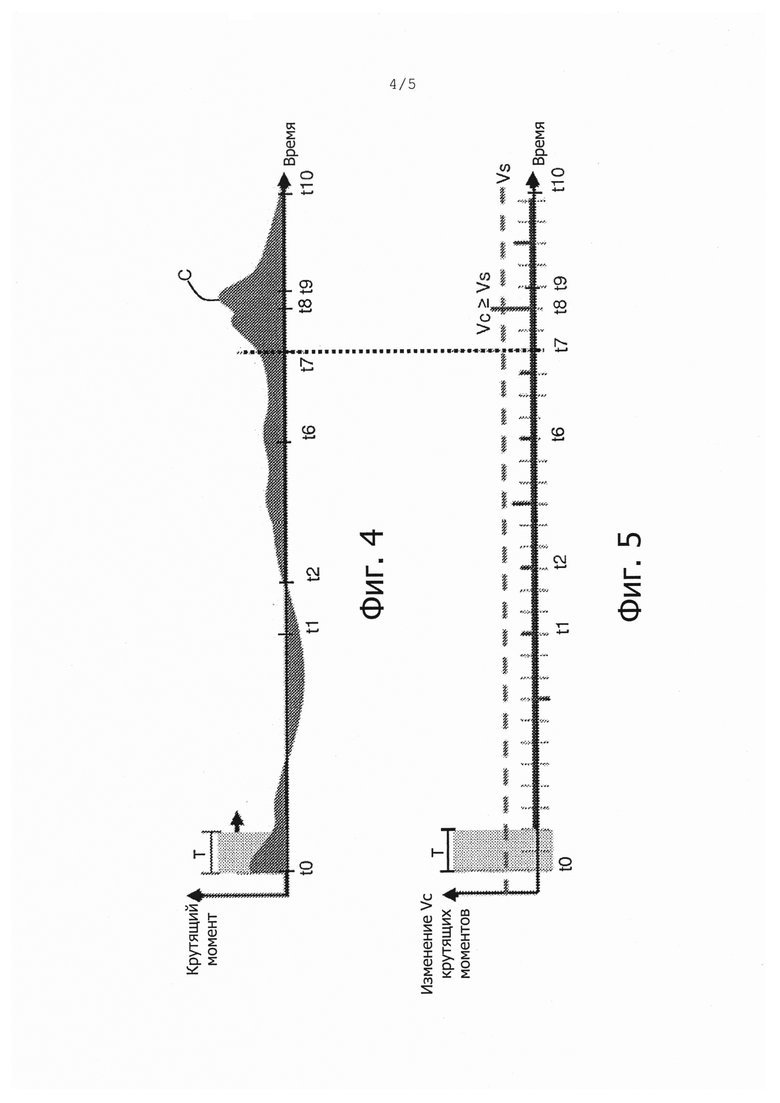
Фиг. 4 - интеграл регулирования холостого хода согласно варианту выполнения изобретения.
Фиг. 5 - изменение крутящего момента относительно времени согласно варианту выполнения изобретения.
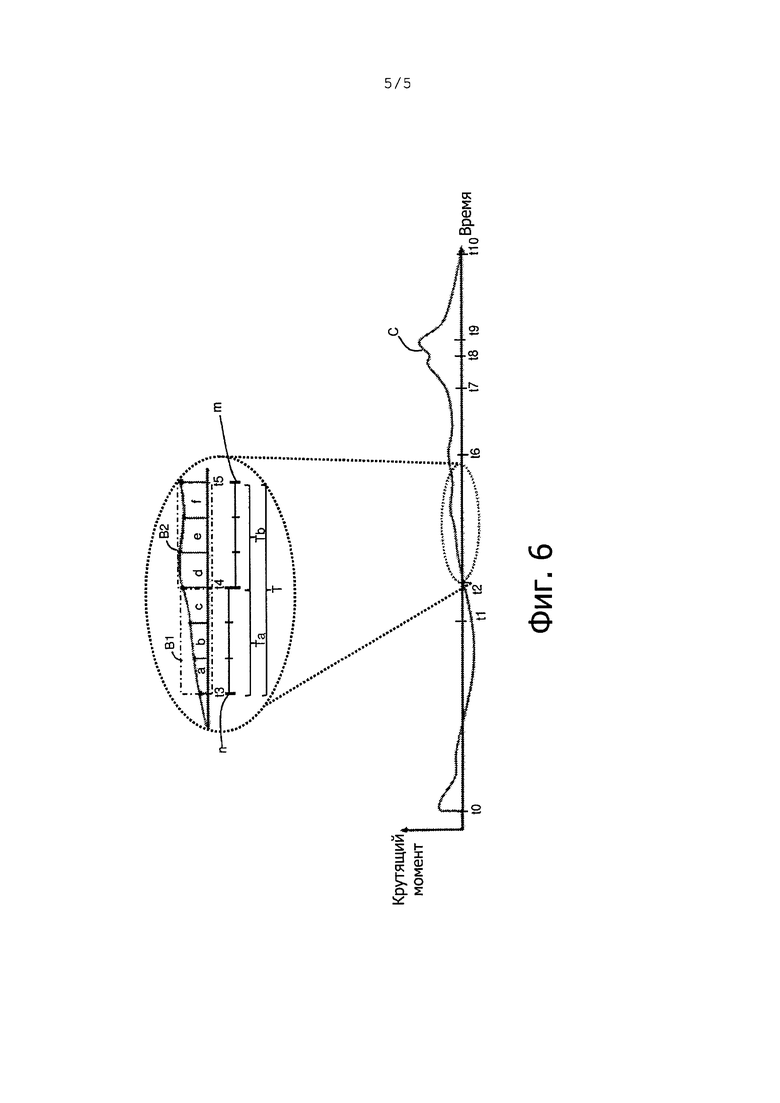
Фиг. 6 - вычисление изменения крутящего момента на основании интеграла регулирования холостого хода согласно варианту выполнения изобретения.
На фиг. 1 представлен вариант выполнения системы 1 защищенного дистанционного запуска транспортного средства, содержащей устройство 2 активации дистанционного запуска, блок 3 управления и устройство 4 контроля двигателя. На фигуре показаны только элементы, необходимые для понимания изобретения.
Устройство 2 защищенного дистанционного запуска содержит, например:
- пульт дистанционного управления, такой как ключ транспортного средства, содержащий нажимные кнопки;
- бортовой компьютер транспортного средства, который можно запрограммировать для запуска транспортного средства в данные дату и время; и/или
- телематическое устройство, такое как удаленный компьютер или смартфон.
Это устройство 2 активации выполнено с возможностью установления связи с блоком 3 управления, находящимся на транспортном средстве. Этот блок 3 управления выполнен с возможностью обработки сигнала активации, принятого от устройства 2 активации, чтобы инициировать запуск транспортного средства. Этот блок 3 управления может также на основании обработки этого сигнала включать блокировку/разблокировку дверей транспортного средства и управлять активацией/деактивацией устройств охлаждения и/или обогрева транспортного средства.
В этой системе 1 защищенного дистанционного запуска устройство 4 контроля содержит, в частности, модуль 5 регулирования режима двигателя, модуль 6 отслеживания и модуль 7 управления двигателем.
Это устройство 4 контроля двигателя, более известное под названием ЕСМ ("Модуль управления двигателем") выполнено с возможностью управления двигателем 10 транспортного средства в зависимости от получаемых им информационных данных.
Двигатель 10, управляемый устройством 4 контроля, является двигателем 10 внутреннего сгорания, например, четырехтактным двигателем с четырьмя расположенными в линию цилиндрами, который оборудован устройством питания топливом, например, типа многоканальной инжекции, когда каждый цилиндр получает питание топливом через специальный электрический инжектор.
Открывание каждого электрического инжектора происходит по команде модуля 7 управления этого устройства 4 контроля, который определяет впрыскиваемое количество топлива в зависимости от условий работы. Этот модуль 7 управления может запускать или выключать двигатель 10. Он может также увеличивать крутящий момент, в частности, когда получает заданное значение от модуля 5 регулирования холостого хода, чтобы поддерживать режим холостого хода, в частности, действуя на инжекторы и на исполнительные средства двигателя 10.
Этот модуль 5 регулирования холостого хода системы 1 защищенного дистанционного запуска позволяет задавать и/или регулировать переменный режим холостого хода двигателя. Фаза холостого хода соответствует ситуации, в которой двигатель 10 работает, и педаль акселератора не задействована.
Таким образом, модуль 5 регулирования позволяет связать режим двигателя 10 с заданным режимом, регулируя этот режим двигателя вокруг этого заданного режима, несмотря на возможные помехи и прохождение через различные переходные фазы, такие как фаза запуска двигателя 10.
Таким образом, модуль 5 регулирования обеспечивает устойчивость работы двигателя 10 в режиме малых оборотов, учитывая, в частности, условия входа в фазу холостого хода, которые могут значительно меняться в том, что касается, например, температуры воды охлаждения двигателя 10, температуры воздуха, возможного присутствия случайных помех, связанных с включением потребителя электрической энергии (устройство освещения, вентилятор) или механической энергии (устройство охлаждения/обогрева, усилитель рулевого управления, сцепление).
Для обеспечения управления режимом двигателя в фазе холостого хода этот модуль 5 регулирования применяет алгоритм вычисления типа ПИД-корректора (сокращение от «пропорционально-интегрально-дифференциальный») для генерирования и последующей подачи командных сигналов, связанных с командами запроса крутящего момента и передаваемых затем в модуль 7 управления, с которым он связан. Этот модуль 5 регулирования выполнен с возможностью приема входных сигналов, связанных с работой двигателя 10 и периферических агрегатов, осуществления операций и генерирования командных сигналов.
С этим модулем 5 регулирования связан также модуль 6 отслеживания. Как известно, он содержит аппаратные и программные элементы 7, выполненные с возможностью осуществления вычисления, в частности, с целью конкретных видов обработки командных сигналов, передаваемых модулем 5 регулирования в модуль 7 управления двигателем. Аппаратные элементы 8 содержит блок CPU, оперативную память (RAM), постоянную память (ROM), аналого-цифровые преобразователи (A/D) и различные входные и выходные интерфейсы.
Эта система 1 выполнена с возможностью осуществления способа защищенного дистанционного запуска транспортного средства.
Этот способ, представленный на фиг. 2, содержит этап 11 активации запуска двигателя 10 транспортного средства, на котором устройство 2 активации может передать сигнал запуска в блок 3 контроля, находящийся на транспортном средстве.
Этот блок 3 контроля производит обработку этого сигнала запуска, которая состоит в декодировании указанного сигнала и в генерировании команды запуска двигателя 10.
В частности, во время этого этапа 11 активации дистанционного запуска блок 3 контроля осуществляет следующие этапы, представленные на фиг. 3:
- определение 17 способов запуска транспортного средства;
- ожидание 18 сигнала дистанционного запуска;
- включение 19 дистанционного запуска двигателя 10 транспортного средства; и
- получение 26 информации от блока 3 контроля через устройство 4 контроля, что двигатель 10 выключен.
Во время этапа 17 определения способов запуска транспортного средства блок 3 контроля может проверить состояние параметров защиты транспортного средства, чтобы разрешить способы запуска транспортного средства, то есть можно ли запустить транспортное средство, когда водитель находится в кабине транспортного средства и/или, наоборот, когда водитель не находится в непосредственной близости от транспортного средства для его дистанционного запуска.
Параметры защиты, состояние которых проверяется, относятся, например, к положению коробки передач, то есть находится ли она на нейтральной передаче или на стояночном тормозе, к блокировке дверей и т.д.
Таким образом, если результат проверки параметров защиты является удовлетворительным, блок 3 контроля осуществляет 27 этап ожидания 18 получения сигнала запуска от устройства 2 активации. Если же этот результат не является удовлетворительным, блок 3 контроля разрешает запуск только в том случае, если водитель находится в кабине транспортного средства.
Следует отметить, что блок 3 контроля может вернуться 23 на этап определения 17 способов запуска, если состояние параметров защиты поменялось, например, если одна дверь транспортного средства не заперта.
При получении сигнала запуска блок 3 контроля осуществляет этап включения 19 запуска двигателя 10 транспортного средства, который включает в себя следующие подэтапы:
- инициирование 20 дистанционного запуска, во время которого полученный сигнал запуска декодируют и генерируют команду запуска двигателя, включающую в себя, в частности, определение времени, в течение которого будет работать двигатель 10;
- передача 21 команды в модуль 7 управления устройства 4 контроля двигателя, и
- получение 22 блоком 3 контроля информации от устройства 4 контроля о том, что двигатель 10 работает.
Блок 3 контроля выполнен также с возможностью осуществления этапа 26 получения информации, поступающей от устройства 4 контроля и связанной с выключением двигателя 10. При этом блок 3 контроля возвращается 24 на этап 17 определения способов запуска транспортного средства.
Следует отметить, что блок 3 контроля возвращается 25 также на этап 18 ожидания сигнала дистанционного запуска, если дистанционный запуск был остановлен 28 по причине истечения времени работы, определенного на этапе 20 инициирования запуска, или если блок 3 контроля получил сигнал выключения двигателя 10 от устройства 2 активации.
Таким образом, как было указано выше, при получении этой команды модуль 7 управления двигателем включает процедуру запуска двигателя 10, который после включения работает в режиме холостого хода. Этот режим холостого хода двигателя поддерживается при помощи заданного крутящего момента, контролируемого модулем 5 регулирования.
Однако такой режим холостого хода двигателя может подвергаться действию помех, когда активируют потребитель электрической или механической энергии транспортного средства, в частности, когда этот потребитель влияет на двигатель 10 через отбор крутящего момента. Чтобы компенсировать этот отбор крутящего момента и иметь возможность поддерживать режим двигателя, модуль 5 регулирования генерирует командные сигналы, связанные с командами запроса крутящего момента. Эти командные сигналы передаются в модуль 7 управления двигателем с целью изменения заданного значения крутящего момента двигателя 10, чтобы изменить заданное значение крутящего момента двигателя 10 в сторону его увеличения.
Командные сигналы передаются в модуль 7 управления через модуль 6 отслеживания, который на основании этих сигналов может обнаружить событие, которое соответствует, если транспортное средство было запущено дистанционно, троганию с места при помощи сцепления или троганию с места транспортного средства при приложении заданного крутящего момента, определяемом по нажатию на педаль акселератора. Предпочтительно в этом варианте осуществления отслеживаемое событие является троганием с места при помощи сцепления.
Для этого способ содержит этап обнаружения 16 события, включающий в себя следующие этапы:
- определение 12, на основании командных сигналов, изменения Vc крутящего момента в течение заранее определенного и программируемого интервала Т времени анализа, и
- сравнение изменения Vc крутящего момента с пороговым значением Vs крутящего момента.
Этап 12 определения содержит подэтап обработки командных сигналов. Этот подэтап обработки сигналов, показанный на фиг. 3, 4 и 5, осуществляют на основании цифрового анализа командных сигналов аппаратными 8 и программными 7 элементами модуля 6 отслеживания, состоящего в интегрировании функции f(t), соответствующей этим сигналам и показанной в виде кривой С на фиг. 3 и 5.
Для этого подэтап обработки включает в себя предварительную обработку этих командных сигналов с вычислением интеграла кривой С, связанной с этими сигналами и называемой кривой интеграла регулирования холостого хода, которую затем записывают в память модуль 6 отслеживания. Это вычисление производят в зависимости от программных элементов 7, содержащихся в памяти модуля 6 отслеживания, и от аппаратных элементов 7, которые используют значения запрашиваемых крутящих моментов, связанные с командными сигналами и записанные в памяти модуля 6 отслеживания, для вычисления этого интеграла кривой С. Этот интеграл регулирования холостого хода показан на фиг. 4 и сформулирован в этом примере, показанном на фиг. 4, следующим образом:
 , где t0 соответствует моменту времени, в который двигатель 10 транспортного средства был запущен в режиме холостого хода, и t10 соответствует моменту времени, в который крутящий момент стал нулевым вследствие обнаружения события в момент времени t8.
, где t0 соответствует моменту времени, в который двигатель 10 транспортного средства был запущен в режиме холостого хода, и t10 соответствует моменту времени, в который крутящий момент стал нулевым вследствие обнаружения события в момент времени t8.
Таким образом, предварительную обработку этих командных сигналов производят по мере генерирования модулем 5 регулирования значений запрашиваемого крутящего момента, образующих командные сигналы.
В рамках обработки этих сигналов интервал Т времени анализа программируют в зависимости от отслеживаемого события. В частности, его параметрируют таким образом, чтобы он соответствовал времени, необходимому для идентификации события, которое должен обнаружить модуль 6 отслеживания. Если отслеживаемым событием является трогание с места при помощи сцепления, этот интервал Т времени анализа составляет примерно от 3 до 20 секунд.
Таким образом, определение изменения Vc крутящего момента путем вычисления осуществляют на основании этих предварительно обработанных сигналов в интервалы Т времени анализа.
Как показано на фиг. 6, вычисление изменения Vc крутящего момента осуществляют между по меньшей мере первой совокупностью В1 запрашиваемых крутящих моментов в первый интервал Та времени и по меньшей мере второй совокупностью В2 крутящих моментов во второй интервал Tb времени. Сумма первого Та и второго Tb интервалов времени равна интервалу Т времени анализа.
Первый интервал Та времени, ограниченный моментами t3 и t4 времени, и второй интервал Tb времени, ограниченный моментами t4 и t5 времени, следуют друг за другом и не обязательно равны между собой.
Как показано на фиг. 6, первая совокупность В1 запрашиваемых крутящих моментов соответствует площади поверхности, ограниченной этой кривой и осью абсцисс, за первый интервал Та времени. Что касается второй совокупности В2 запрашиваемых крутящих моментов, то она соответствует площади поверхности, ограниченной этой кривой и осью времени, за второй интервал Tb времени.
Для осуществления обработки командных сигналов аппаратные 8 и программные 7 элементы могут применять алгоритмы, такие как так называемый метод трапеций или так называемый метод прямоугольников.
В настоящем варианте выполнения модуль 6 отслеживания предпочтительно применяет алгоритм, связанный с методом трапеций, который позволяет вычислить скользящий интеграл части интеграла регулирования холостого хода, включенной в интервал Т времени анализа.
Следует отметить, что алгоритм, связанный с методом трапеций, позволяет повысить точность изменения Vc крутящего момента, определяемого за интервал Т времени анализа.
Для этого первую совокупность В1 крутящих моментов делят на несколько подгрупп а, b, с крутящих моментов за n временных шагов первого интервала Та времени. Точно так же, вторую В1 крутящих моментов делят на несколько подгрупп d, е, f крутящих моментов за m временных шагов второго интервала Tb времени.
Аналогично первой В1 и второй В2 совокупностям крутящих моментов, каждая подгруппа а, b, с, d, е, f крутящих моментов соответствует площади поверхности между кривой и осью времени для каждого шага пит времени. Следует отметить, что шаги n и m времени не обязательно равны между собой.
Таким образом, площадь В1, относящаяся к первой совокупности В1 крутящих моментов, и площадь В2, относящаяся к второй совокупности В2 крутящих моментов, соответственно равны:
- В1=а+b+с;
- В2=d+е+f.
При помощи этого алгоритма аппаратные 8 и программные 7 элементы модуля 6 отслеживания определяют значения крутящих моментов для первой В1 и второй В2 совокупностей крутящих моментов, применяя следующие уравнения:
- для первой совокупности В1 крутящих моментов:

где Rn(f) соответствует квадратичной погрешности и равно:  при
при 
- для второй совокупности В2 крутящих моментов:

где Rm(f) соответствует квадратичной погрешности и равно:  при
при  .
.
Изменение Vc крутящего момента равно в этом случае разности между значением крутящего момента второй совокупности В2 крутящих моментов и значением крутящего момента первой совокупности В1 крутящих моментов: то есть Vc=В2-В1.
На фиг. 5, где показаны разные изменения Vc крутящих моментов в зависимости от времени, примеры изменений Vc крутящих моментов были вычислены модулем 6 отслеживания в моменты времени t1, t2, t6 и t8.
После вычисления изменения Vc крутящего момента способ предусматривает этап 13 сравнения между вычисленным изменением Vc между первой В1 и второй В2 совокупностями крутящих моментов и пороговым значением Vs обнаружения, которое программируют в зависимости от отслеживаемого события, в данном случае трогания с места при помощи сцепления.
Если значение Vc изменения крутящего момента по существу превышает или равно пороговому значению Vs, то есть Vc≥Vs, как, например, в момент t8 времени на фиг. 5, модуль 6 отслеживания передает в модуль 7 управления команду срабатывания 14 выключения двигателя 10. Следует отметить, что в этом контексте транспортное средство начинает трогаться с места при помощи сцепления в момент X1 времени. Затем устройство 4 контроля двигателя передает информацию, связанную с выключением двигателя, в блок 3 контроля.
Если же, наоборот, значение Vc изменения крутящего момента меньше порогового значения Vs, то есть Vc<Vs, как, например, в моменты t1, t2 и t6 времени, модуль 6 отслеживания не передает в модуль 7 управления никаких команд с целью выключения двигателя 10. При этом в зависимости от командных сигналов, генерируемых модулем 7 регулирования, модуль 7 управления будет управлять 15 двигателем 10 таким образом, чтобы увеличить его крутящий момент с целью компенсации отбора крутящего момента и поддержания, таким образом, режима двигателя.
В этом способе частотность повторения этапа 16 обнаружения события можно программировать. Так, эту частотность можно запрограммировать таким образом, чтобы инициировать этот этап способа в течение от 0,2 до 3 секунд.
Следует отметить, что программирование этой частотности с высокими значениями позволяет, благодаря способу, обнаружить событие, когда оно происходит быстро.
Настоящее изобретение не ограничивается описанным выше вариантом осуществления и включает в себя различные версии и обобщения, содержащиеся в нижеследующей формуле изобретения.
Изобретение относится к способу и системе защищенного дистанционного запуска транспортного средства. При осуществлении способа активируют запуск двигателя транспортного средства. Обнаруживают событие. При обнаружении события определяют изменение (Vc) крутящего момента за интервал времени анализа на основании сигналов управления, связанных с командами запроса крутящего момента, поступающими от модуля регулирования холостого хода двигателя. Сравнивают определенные изменения (Vc) крутящего момента с пороговым значением (Vs) крутящего момента. Запускают выключение двигателя, когда указанное определенное изменение (Vc) крутящего момента превышает или равно пороговому значению (Vs) крутящего момента. Достигается создание способа и системы защищенного дистанционного запуска, которые являются надежными и простыми в применении. 3 н. и 8 з.п. ф-лы, 6 ил.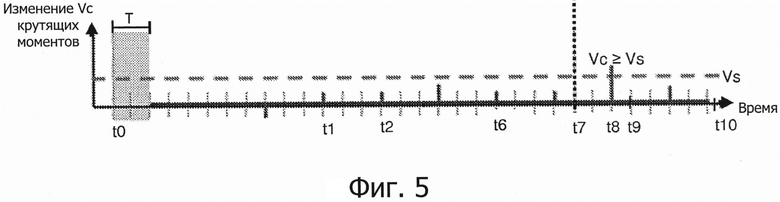
1. Способ защищенного дистанционного запуска транспортного средства, содержащий этапы, на которых
активируют (11) запуск двигателя (10) транспортного средства;
обнаруживают (16) событие, причем при обнаружении события
определяют (12) изменение (Vc) крутящего момента за интервал (Т) времени анализа на основании сигналов управления, связанных с командами запроса крутящего момента, поступающими от модуля (5) регулирования холостого хода двигателя;
сравнивают (13) определенные изменения (Vc) крутящего момента с пороговым значением (Vs) крутящего момента, и
запускают (14) выключение двигателя (10), когда указанное определенное изменение (Vc) крутящего момента превышает или равно пороговому значению (Vs) крутящего момента.
2. Способ по п. 1, отличающийся тем, что этап определения (12) изменения (Vc) крутящего момента выполняют между по меньшей мере первой совокупностью (В1) крутящих моментов, запрошенных за первый интервал (Т1) времени, и по меньшей мере второй совокупностью (В2) крутящих моментов, запрошенных за второй интервал (Т2) времени.
3. Способ по п. 1, отличающийся тем, что первый и второй интервалы (Т1, Т2) времени следуют друг за другом.
4. Способ по п. 1, отличающийся тем, что повторяют этап обнаружения (16) с частотностью, которая является программируемой.
5. Способ по п. 1, отличающийся тем, что на этапе определения (12) применяют алгоритм типа метода трапеций или метода прямоугольников.
6. Способ по п. 1, отличающийся тем, что интервал (Т) времени анализа, по существу, равен сумме первого и второго интервалов (Т1, Т2) времени.
7. Способ по п. 1, отличающийся тем, что пороговое значение (Vs) крутящего момента программируют в зависимости от отслеживаемого события.
8. Способ по п. 1, отличающийся тем, что указанное событие соответствует троганию с места транспортного средства при помощи сцепления или троганию с места транспортного средства при приложении заданного значения крутящего момента, определяемого по нажатию на педаль акселератора.
9. Система (1) защищенного дистанционного запуска транспортного средства для осуществления способа по любому из пп. 1-8, содержащая модуль (7) управления двигателем, выполненный с возможностью запуска или выключения двигателя (10) транспортного средства, отличающаяся тем, что содержит
модуль (6) отслеживания изменения (Vc) крутящего момента за интервал (Т) времени анализа на основании сигналов управления, связанных с командами запроса крутящего момента, и
модуль (5) регулирования холостого хода двигателя, выполненный с возможностью подачи указанных сигналов,
при этом модуль (6) отслеживания связан с модулем (7) управления двигателем и с модулем (5) регулирования холостого хода.
10. Система (1) по п. 9, отличающаяся тем, что модуль (6) отслеживания содержит аппаратные (8) и программные (7) средства, выполненные с возможностью обнаружения (16) события, в частности трогания с места транспортного средства при помощи сцепления или трогания с места транспортного средства при приложении заданного значения крутящего момента, определяемого по нажатию на педаль акселератора.
11. Транспортное средство, содержащее систему (1) защищенного дистанционного запуска по п. 9 или 10.
| СИСТЕМА ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2237585C1 |
| Способ изготовления малогабаритных трансформаторов | 1956 |
|
SU106193A1 |
| US 2011148566 A1, 23.06.2011. | |||

