Изобретение относится к технике обеспечения активной безопасности дорожного движения, в частности к системам предупреждения пересечения и наезда транспортного средства на осевую разделительную линия автомобильной дороги.
Известен способ безопасного быстрого движения автомобиля, который заключается в ограничении предельной скорости на криволинейном участке трассы по показаниям токоподводящей стрелки регистрирующего прибора за счет воздействия на двигатель автомобиля и отключения, по меньшей мере, одного его цилиндра. В качестве показаний токоподводящей стрелки используют ее отклонение, пропорциональное центробежному ускорению при движении автомобиля на криволинейном участке трассы, а на двигатель воздействуют отключением, по крайней мере, одного его цилиндра при превышении указанным ускорением заданного порога значений ускорения для соответствующего коэффициента сцепления (см. патент РФ №2110417, Мкл. B60K 31/14, опубл. 1998 г.).
Недостатком способа является отсутствие возможности контролировать положение автомобиля относительно разделительной полосы горизонтальной разметки и, как следствие, при этом не исключается возможность выезда автомобиля на встречную полосу движения.
Известен также способ безопасного дорожного движения, связанного с горизонтальной дорожной разметкой. Безопасность дорожного движения обеспечивается за счет повышения визуальной узнаваемости разделительной полосы, поскольку верхний слой делается световозвращающим, заполненным световозвращающими микростеклошариками (см. патент РФ №2447227, Мкл. E01F 9/04, опубл. 2012 г.).
Недостатком такой разметки является также невозможность ее использования для автоматической корректировки траектории движения автомобиля в опасных ситуациях - выезд на встречную полосу движения.
Наиболее близким к предлагаемому изобретению по технической сущности является принятый в качестве прототипа способ формирования зоны обзора системы предупреждения наезда транспортного средства, заключающийся в излучении сигналов с помощью сканирующей в горизонтальной плоскости диаграммы направленности антенны транспортного средства. С целью адаптации формы зоны обзора к условиям движения измеряют ряд характеризующих движение параметров, а именно угол поворота диаграммы направленности антенны в горизонтальной плоскости относительно оси транспортного средства, скорость движения транспортного средства, коэффициент сцепления шин с дорогой и коэффициент затухания сигнала в среде, в соответствии с которыми изменяют мощность излучаемого сигнала, изменяя тем самым дальность обнаружения помех, соответствующую текущим условиям движения (см. АС СССР №1758618, Мкл. G01S 13/93, опубл. 1992 г.).
Недостатком способа также является невозможность его использования для автоматической корректировки траектории движения транспортного средства в случае выезда последнего на встречную полосу движения.
Технической задачей, на решение которой направлено изобретение, является обеспечение безопасности движения транспортного средства за счет минимизации возможности выезда его на полосу встречного движения автоматически, без участия водителя.
Решение поставленной технической задачи достигается тем, что в способе безопасного движения транспортного средства по автомобильной дороге с осевой разделительной линией, заключающемся в том, что при его движении осуществляют радио-сканирование в горизонтальной плоскости заданной зоны на пути следования транспортного средства, по результатам которого определяют значение контрольного параметра, используемого затем для корректировки, по меньшей мере, траектории движения, согласно изобретению в качестве заданной зоны радио-сканирования избирают зону между передним левым колесом транспортного средства и осевой разделительной линией дороги, при этом транспортное средство оснащают логическим устройством, в качестве контрольного параметра назначают расстояние L до разделительной линии дороги, а осевую разделительную линию автомобильной дороги выполняют в виде линейного объекта, обладающего повышенными радиоотражающими свойствами, и в случае приближения транспортного средства к осевой разделительной линии на расстояние L менее критического Lкр с помощью логического устройства подают сигнал в систему управления транспортного средства для возврата последнего на безопасную траекторию.
Решение поставленной технической задачи становится возможны благодаря тому, что осевой разделительной полосе автомобильной дороги придают ярко выраженные радиоотражающие свойства. В процессе сканирования осуществляется контроль заданной зоны между передним левым колесом и осевой разделительной линией автомобильной дороги. Использование в предлагаемом способе надлежащим образом подготовленной, а именно путем придания ей повышенных радиоотражающих свойств, осевая разделительная линия становится хорошо идентифицируемой бортовым сканирующим устройством, что позволяет автоматически контролировать расстояние от колес транспортного средства до осевой разделительной линии и таким образом не допускать выезда транспортного средства на встречную полосу, тем самым обеспечивая его безопасное движение автоматически без участия водителя.
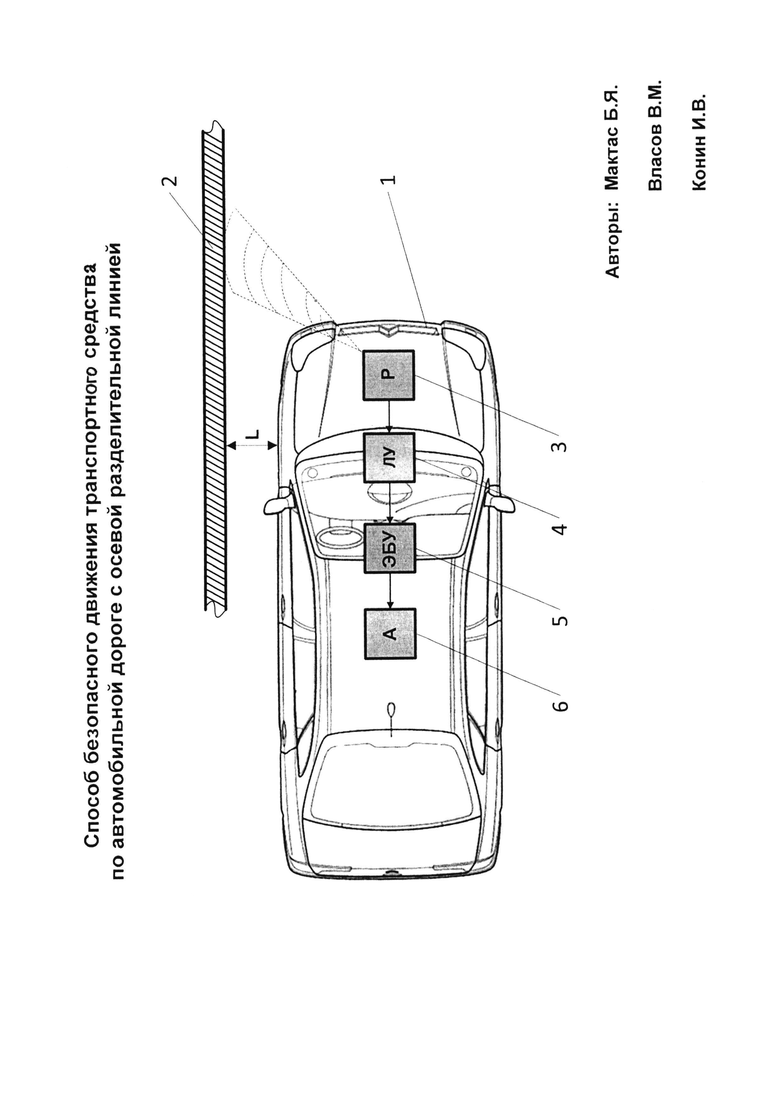
Способ иллюстрируется чертежом, на котором изображена схема, поясняющая движение транспортного средства вблизи от осевой разделительной линии.
На чертеже использованы следующие буквенные обозначения:
P - радарная установка;
ЛУ - логическое устройство;
ЭБУ - электронный блок управления транспортного средства;
А - актуаторы транспортного средства.
На схеме представлено транспортное средство 1, движущееся вблизи осевой разделительной линии 2 дороги и оснащенное связанными между собой радарной установкой 3, логическим устройством 4, электронным блоком 5 управления транспортного средства и актуаторами 6 (исполнительными механизмами системы управления транспортного средства).
Способ безопасного движения транспортного средства по автомобильной дороге заключается в том, что при движении осуществляется радио-сканирование в горизонтальной плоскости заданной зоны на пути следования транспортного средства. В качестве заданной зоны радио-сканирования избирают зону между передним левым колесом транспортного средства 1 и осевой разделительной линией 2 дороги. По результатам радио-сканирования определяют значения контрольного параметра, используемого затем для корректировки, по меньшей мере, траектории движения. В качестве контрольного параметра назначают расстояние L между осевой разделительной линией 2 и транспортным средством 1. Для этого разделительной линии придают повышенные радиоотражающие свойства, а на транспортное средство размещают радарную установку 3 и связанное с ним логическое устройство 4, которые подключены к электронному блоку 5 управления транспортного средства. В случае приближения транспортного средства 1 к осевой разделительной линии 2 на расстояние L менее, чем критическое с точки зрения безопасности расстояние Lкр, логическое устройство 4 подает сигнал в блок 5 управления транспортного средства 1 для возврата последнего на безопасную траекторию.
В процессе движения автомобиля логическое устройство 4 с помощью радарной установки 3 отслеживает расстояние 4 между транспортным средством 1 и разделительной линией 2.
Способ реализуется следующим образом.
При движении транспортного средства 1 вдоль осевой разделительной линии 2, обладающей повышенными радиоотражающими свойствами, последняя облучается радиоволнами, излучаемыми радарной установкой 3. Отраженные от осевой разделительной линии 2 радиосигналы, попадая на логическое устройство 4, обрабатываются последним с целью определения расстояния L между левым передним колесом транспортного средства 1 и разделительной линией 2. В случае, если рассчитанное логическим устройством 4 расстояние L станет меньше некоторого заранее заданного критического расстояния Lкр, то есть, если L<Lкр, логическое устройство 4 выдает сигнал на блок 5 управления транспортного средства 1, который по заранее заложенной в него программе воздействует на актуаторы 6 (исполнительные механизмы) и возвращает транспортное средство на безопасную траекторию, для которой расстояние L≥Lкр, предотвращая тем самым выезд транспортного средства на встречную полосу движения. Значение критического с точки зрения безопасности расстояния Lкр закладывается в память логического устройства 4.
В качестве актуаторов 6 (исполнительных механизмов) могут служить, к примеру, тяги дроссельной заслонки, элементы тормозной системы, элементы воздействия на рулевое колесо и т.п.
Придать осевой разделительной линии радиоотражающие свойства можно, в частности, одним из следующих методов - нанести на поверхность полосы радиоотражающие краски, внедрить в материал (краска, термопластик) разделительной линии металлическую фракцию - опилки, стружка, уложить под линией или в ее объем металлическую полосу или алюминиевую фольгу и т.п.
Таким образом, изобретение обеспечивает безопасность движения транспортного средства за счет минимизации возможности выезда его на полосу встречного движения автоматически без участия водителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ НА АВТОДОРОГАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2368722C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2625213C2 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ | 2022 |
|
RU2814813C1 |
| СТРОИТЕЛЬНЫЙ КОМПЛЕКС | 2008 |
|
RU2379404C2 |
| СПОСОБ ФОРМИРОВАНИЯ АВТОКОЛОННЫ ИЗ ГРУЗОВЫХ АВТОМОБИЛЕЙ БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2017 |
|
RU2716526C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕКТОВ | 2022 |
|
RU2806452C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2695479C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2659670C1 |
Изобретение относится к технике обеспечения активной безопасности дорожного движения, в частности к системам предупреждения пересечения и наезда транспортного средства на осевую разделительную линию автомобильной дороги. Способ реализуется путем оснащения транспортного средства радарной установкой и связанными с ней логическим устройством и электронным блоком управления, воздействующим на активаторы транспортного средства. Кроме того, согласно предлагаемому способу разделительной линии автомобильной дороги придаются повышенные радиоотражающие свойства. Во время движения транспортного средства вдоль осевой разделительной линии последняя облучается радиоволнами, излучаемыми радарной установкой. Отраженные от осевой разделительной линии радиосигналы, попадая на логическое устройство, обрабатываются с целью определения расстояния L между левым передним колесом транспортного средства и разделительной линией. В случае, если рассчитанное логическим устройством расстояние L станет меньше некоторого заранее заданного критического расстояния Lкр, то есть, если L<Lкр, то логическое устройство выдает сигнал на блок управления транспортного средства, который по заранее заложенной в него программе воздействует на активаторы и возвращает транспортное средство на безопасную траекторию, для которой расстояние L≥Lкр, предотвращая тем самым выезд транспортного средства на встречную полосу движения. Изобретение обеспечивает безопасность движения транспортного средства за счет минимизации возможности выезда его на полосу встречного движения автоматически без участия водителя. 1 ил.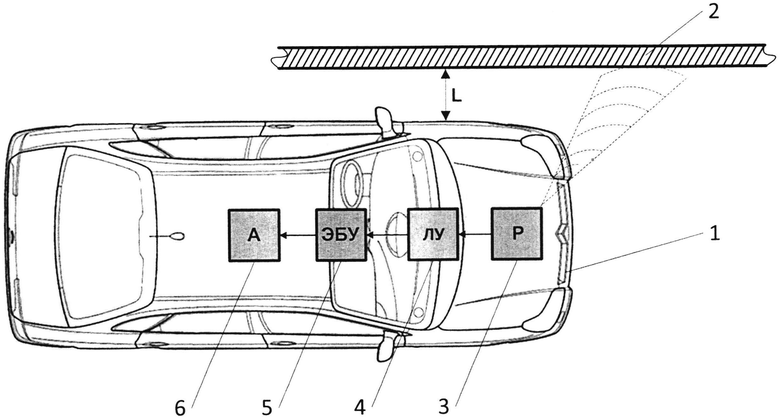
Способ безопасного движения транспортного средства по автомобильной дороге с осевой разделительной линией, заключающийся в том, что при его движении осуществляют радио-сканирование в горизонтальной плоскости заданной зоны на пути следования транспортного средства, по результатам которого определяют значение контрольного параметра, используемого затем для корректировки, по меньшей мере, траектории движения, отличающийся тем, что в качестве заданной зоны радио-сканирования избирают зону между передним левым колесом транспортного средства и осевой разделительной линией дороги, при этом транспортное средство оснащают логическим устройством, в качестве контрольного параметра назначают расстояние L до разделительной линии дороги, а осевую разделительную линию автомобильной дороги выполняют в виде линейного объекта, обладающего повышенными радиоотражающими свойствами и в случае приближения транспортного средства к осевой разделительной линии на расстояние L менее критического Lкр с помощью логического устройства подают сигнал в систему управления транспортного средства для возврата последнего на безопасную траекторию.
| Способ формирования зоны обзора системы предупреждения наезда транспортного средства | 1990 |
|
SU1758618A1 |
| УСТРОЙСТВО КОНТРОЛЯ ВОЖДЕНИЯ | 2010 |
|
RU2520855C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДОРОЖНОГО ДВИЖЕНИЯ И СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДОРОЖНОГО ДВИЖЕНИЯ | 2005 |
|
RU2298215C1 |
| US 7199368 B2, 03.04.2007. | |||

