Изобретение относится к обеспечению активной безопасности и, в частности, к системам предупреждения наезда сзади при экстренном торможении и наезда при движении задним ходом,
Известны различные методы формирования зоны обзора систем предупреждения наезда, например, последовательное сканирование мертвого угла задней полусферы, создание большого числа смещенных лучей, т.е. параллельного обзора, создание одной широкой зоны.
Основным недостатком перечисленных устройств является невозможность оптимизировать зону обзора в зависимости от скорости движения, состояния дороги и затухания полученного сигнала в среде.
Наиболее близким по технической сущности является способ сканирования мертвого угла в задней полусфере, при котором передатчик излучает колебания постоянной мощности вне зависимости от угла поворота диаграммы направленности.
К недостаткам способа относится то, что зона обзора в горизонтальной плоскости представляет собой половину окружности, что вызывает обнаружение объектов.значительно смещенных вправо и влево и не представляющих опасность, а также невозможность изменять дальность обнаружения потенциально опасных автомобилей в зависимости от условий движения,
Цель изобретения - адаптация Формы зоны обзора к условиям движения.
Поставленная цель достигается тем, что в способе, заключающемся в излучении сигналов с помощью сканирующей в горизонтальной плоскости диаграммы направленности антенны транспортного средства измеряют угол поворота jb
(Л
с
XI ел
00
о
««А 00
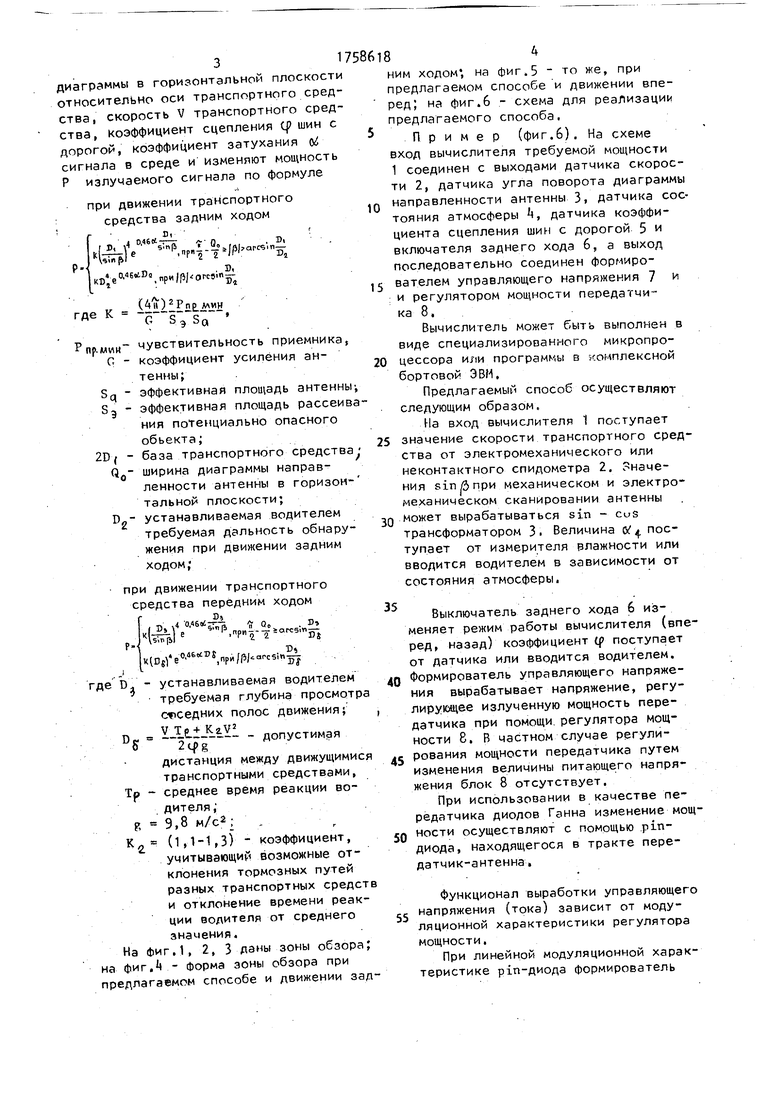
диаграммы в горизонтальной плоскости относительно оси транспортного средства, скорость V транспортного средства, коэффициент сцепления q шин с дорогой, коэффициент затухания ъб сигнала в среде и Изменяют мощность Р излучаемого сигнала по формуле
при движении транспортного средства задним ходом
Г .-гИ-.-,
D, ,np«|fJJ orc9i«
р-
кв,.„H4WD.
де К
пр мин О
Sa 2D, - «о
lliliEnL J G S з SQ
чувствительность приемника, коэффициент усиления антенны;
эффективная площадь антенны , эффективная площадь рассеивания потенциально опасного обьекта;
база транспортного средства; ширина диаграммы направленности антенны в горизон- тальной плоскости;
D-- устанавливаемая водителем требуемая дальность обнаружения при движении задним ходом;
при движении транспортного средства передним ходом
4 ° 461 5ГЛ « Q..
е |S,при Ј--Ј огсб.п;г:
и( Р V U«4i
1«10й е 1)81при/р/ -гс5«
S
1
де D
допустимая
устанавливаемая водителем требуемая глубина просмотра спседних полос движения;
VTp+lUV2
DS 2сЈя
дистанция между движущимися транспортными средствами,
То - среднее время реакции водителя , g 9,8 м/с2;
KЈ (1,1-1,3) коэффициент, учитывающий возможные отклонения тормозных путей разных транспортных средств и отклонение времени реакции водителя от среднего значения.
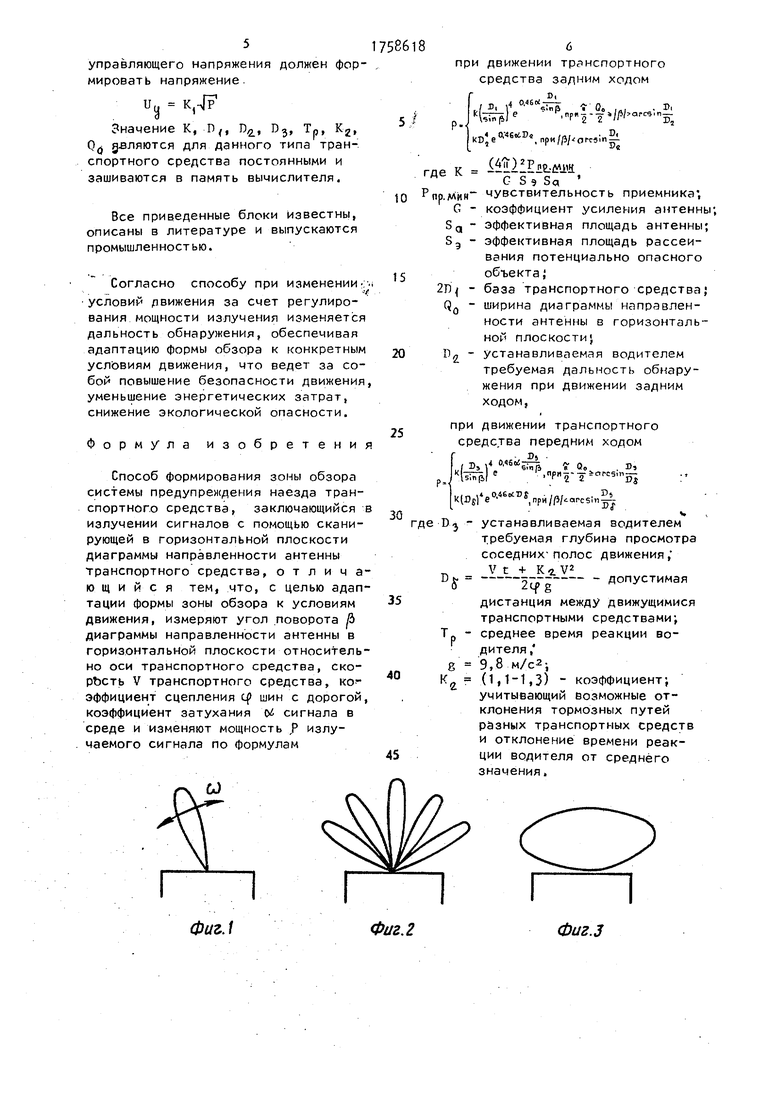
На фиг.1, 2, 3 даны зоны обзора; а фиг. - форма зоны обзора при редлагаемом способе и движении зад
5
0
5
ним ходом, на фиг. 5 - то же, при предлагаемом способе и движении вперед) на фиг.6 - схема для реализации предлагаемого способа.
Пример (фиг.6). На схеме вход вычислителя требуемой мощности 1 соединен с выходами датчика скорости 2, датчика угла поворота диаграммы направленности антенны 3, датчика состояния атмосферы Д, датчика коэффициента сцепления шин с дорогой 5 и включателя заднего хода 6, а выход последовательно соединен формирователем управляющего напряжения 7 и и регулятором мощности передатчика 8,
Вычислитель может быть выполнен в виде специализированного микропроцессора или программы в комплексной бортовой ЭВМ,
Предлагаемый способ осуществляют следующим образом.
На вход вычислителя 1 поступает значение скорости транспортного средства от электромеханического или неконтактного спидометра 2. Значения sin А при механическом и электромеханическом сканировании антенны может вырабатываться sin - cus трансформатором 3. Величина & поступает от измерителя влажности или вводится водителем в зависимости от состояния атмосферы.
0
Выключатель заднего хода 6 изменяет режим работы вычислителя (вперед, назад) коэффициент ср поступает от датчика или вводится водителем.
0 Формирователь управляющего напряжения вырабатывает напряжение, регулирующее излученную мощность передатчика при помощи регулятора мощности 8. В частном случае регулис рования мощности передатчика путем изменения величины питающего напряжения блок 8 отсутствует.
При использовании в качестве передатчика диодов Ганна изменение мощности осуществляют с помощью pin0
5
диода, находящегося в тракте передатчик-антенна ,
Функционал выработки управляющего напряжения (тока) зависит от модуляционной характеристики регулятора мощности,
При линейной модуляционной характеристике pin-диода формирователь
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕЗОПАСНОГО ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПО АВТОМОБИЛЬНОЙ ДОРОГЕ С ОСЕВОЙ РАЗДЕЛИТЕЛЬНОЙ ЛИНИЕЙ | 2015 |
|
RU2605650C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ СИСТЕМА ЗАЩИТЫ ГЛАЗ ОТ ОСЛЕПЛЕНИЯ | 2007 |
|
RU2369490C2 |
| Способ предотвращения столкновения транспортного средства с другим участником движения | 2020 |
|
RU2750467C1 |
| РАДАР БЕЗОПАСНОСТИ ДВИЖЕНИЯ АВТОМОБИЛЬНОГО ТРАНСПОРТА | 1992 |
|
RU2092869C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ В КОЛОННЕ | 2004 |
|
RU2292564C2 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ | 2000 |
|
RU2169929C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| УСТРОЙСТВО РЕГИСТРАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ПРИЧИН ДОРОЖНО-ТРАНСПОРТНЫХ ПРОИСШЕСТВИЙ | 2003 |
|
RU2254612C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ | 2001 |
|
RU2190238C1 |
Использование: автомобильные системы активной безопасности, в частности, системы предупреждения наезда сзади при экстренном торможении и наезда при движении задним ходом. Сущность изобретения: для повышения безопасности движения автомобиля за счет адаптации формы зоны обзора к условиям движения изменяют мощность излучения передатчика при сканировании диаграммы направленности в зависимости от угла поворота, скорости автомобиля, коэффициента сцепления шин с дорогой и коэффициента затухания сигнала в среде, б ил.
Фиг.1
Фиг.2
Фиг.З
ФигЛ
Фиг.5
Фаг. 6
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
