ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Настоящая заявка испрашивает приоритет по заявке № 2011-123303 на выдачу патента Японии, зарегистрированной 1 июля 2011 года, раскрытие которой полностью включено в материалы настоящей заявки посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к приводному инструменту, который приводит инструмент в движение линейно в продольном направлении инструмента и выполняет предопределенную операцию на обрабатываемой детали.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Публикация №2008-307655 нерассмотренной заявки на выдачу патента Японии раскрывает приводной инструмент, содержащий динамический поглотитель колебаний в качестве устройства подавления колебаний, который смягчает колебания, формируемые, когда приводной инструмент работает. Приводной инструмент, описанный в № 2008-307655, содержит кривошипно-шатунный механизм, который приводится в действие двигателем и приводит в действие ударный механизм. Вдобавок второй кривошипно-шатунный механизм расположен на одной стороне кривошипно-шатунного механизма напротив двигателя. Второй кривошипно-шатунный механизм активно приводит в движение груз динамического поглотителя колебаний. А именно, колебания, формируемые во время функционирования, уменьшаются посредством принудительного приведения в движение динамического поглотителя колебаний.
Однако, из-за того что кривошипно-шатунный механизм для ударного воздействия долота и второй кривошипно-шатунный механизм для приведения в движение динамического поглотителя колебаний расположены, чтобы находиться друг с другом на одной линии в осевом направлении, конструкция приводного инструмента является сложной и нерациональной для целей снижения веса приводного инструмента.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ЗАДАЧА, КОТОРАЯ ДОЛЖНА БЫТЬ РЕШЕНА ИЗОБРЕТЕНИЕМ
Целью настоящего изобретения, при рассмотрении описанной выше проблемы, является предоставление приводного инструмента, чтобы улучшить технологию относительно принудительного приведения в движение динамического поглотителя колебаний.
СРЕДСТВО ДЛЯ РЕШЕНИЯ ЗАДАЧИ
Вышеупомянутая цель достигается посредством заявленного изобретения. Согласно предпочтительному аспекту изобретения, предоставляется приводной инструмент, который приводит инструмент в движение линейно в продольном направлении инструмента, который выполняет предопределенную операцию на обрабатываемой детали. Электрический приводной инструмент, содержащий: приводной механизм, который приводит инструмент в действие; вращательный вал, который приводит в действие приводной механизм; качающийся элемент, который качается вдоль продольного направления вращательным движением вращательного вала; и динамический поглотитель колебаний, который смягчает колебания, формируемые, когда инструмент выполняет предопределенную операцию. Динамический поглотитель колебаний включает в себя груз, который может смещаться линейно в продольном направлении, и упругий элемент, который смещает груз. Дополнительно, груз приспособлен, чтобы приводиться в движение механически и принудительно компонентой движения относительно продольного направления качающегося движения качающегося элемента в состоянии, в котором груз смещается упругим элементом.
Термин «механически» в изобретении определяется признаком, которым динамический поглотитель колебаний и качающийся элемент соединены друг с другом, посредством чего энергия передается между динамическим поглотителем колебаний и качающимся элементом. В состоянии, в котором груз сдвигается смещающей силой упругого элемента, груз приводится в движение и пассивно смягчает колебания на основании колебаний, формируемых во время предопределенной операции. Термин «принудительно» в изобретении определяется признаком, которым динамический поглотитель колебаний активно смягчает колебания, чтобы подвергаться силе колебаний, как внешней силе, которая отличается от колебаний, формируемых во время предопределенной операции. Предопределенная операция изобретения предпочтительно включает в себя признаки, согласно которым инструмент выполняет операцию обработки молотком, чтобы выполнять ударное движение относительно продольного направления инструмента, на обрабатываемой детали, инструмент выполняет ударно-вращательную операцию, чтобы выполнять ударное движение относительно продольного направления инструмента и вращательное движение относительно направления по окружности инструмента, на обрабатываемой детали, инструмент выполняет операцию разрезания, чтобы выполнять линейное движение относительно продольного направления лезвия, на обрабатываемой детали.
Согласно аспекту, груз динамического поглотителя колебаний приводится в движение качающимся элементом, который качается вращательным валом для приведения инструмента в действие. Таким образом, состав приведения груза в движение упрощается и облегчается. А именно, приведение груза в движение разумно улучшается. Так как состав устройства приведения груза в движение упрощается, общая стоимость приводного инструмента уменьшается.
Согласно дополнительному предпочтительному аспекту изобретения, приводной инструмент дополнительно содержит вращательный элемент, который полностью вращается вместе с вращательным валом. Качающийся элемент приспособлен, чтобы качаться компонентой движения относительно радиального направления вращательного движения вращательного элемента. Предпочтительно, чтобы вращательный элемент был установлен в пределах требуемой длины вращательного вала, который сконструирован для приведения в действие приводного механизма, без увеличения длины вращательного вала для целей установки вращательного элемента. Вращательный элемент изобретения главным образом обеспечен круглым диском, центр которого находится в положении, радиально отстоящем от центра вращательного движения вращательного вала, а именно, вращательный элемент обеспечен эксцентриковым кулачком. Согласно данному аспекту, из-за того что качающийся элемент расположен в пределах длины вращательного вала, приводной инструмент уменьшается в размере относительно продольного направления вращательного вала.
Согласно дополнительному предпочтительному аспекту изобретения, приводной инструмент дополнительно содержит опорный вал, который поддерживает качающийся элемент, как точка опоры качающегося движения качающегося элемента. Опорный вал расположен, чтобы быть параллельным вращательному валу. Согласно этому аспекту, вращательное движение вращательного вала разумно заменяется качающимся движением качающегося элемента.
Согласно дополнительному предпочтительному аспекту изобретения, центр вращательного элемента расположен в эксцентрическом положении, которое отстоит от центра вращательного движения вращательного вала. Смещение груза посредством компоненты движения относительно продольного направления качающегося движения качающегося элемента определяется смещением качающегося элемента и расстоянием смещения вращательного элемента. Согласно данному аспекту, смещение груза определяется приспособлением смещения качающегося элемента и/или расстоянием смещения вращательного элемента.
Согласно дополнительному предпочтительному аспекту изобретения, качающийся элемент включает в себя приводимую в движение часть, которая приводится в движение вращательным элементом, и приводную часть, которая приводит в движение груз. Расстояние между точкой опоры и приводимой в движение частью короче, чем расстояние между точкой опоры и приводной частью. Согласно этому аспекту, смещение приводной части, которая приводит в движение груз, увеличивается смещением приводимой в движение части. Следовательно, смещение качающегося элемента, который приводит груз в движение, достигается легко.
Согласно дополнительному предпочтительному аспекту изобретения, приводной инструмент дополнительно содержит опору, которая поддерживает промежуточную часть вращательного вала в продольном направлении вращательного вала, которая может вращаться. Вращательный вал включает в себя часть приведения инструмента в движение, которая приводит инструмент в движение в одном конце вращательного вала в продольном направлении вращательного вала. Вращательный элемент установлен между промежуточной частью и частью приведения инструмента в движение в продольном направлении вращательного вала. Согласно данному аспекту, из-за того что вращательный элемент установлен на вращательном валу, размер относительно продольного направления вращательного вала уменьшается.
Согласно дополнительному предпочтительному аспекту изобретения, приводной инструмент дополнительно содержит подшипник качения, который установлен и размещен между вращательным элементом и качающимся элементом. Согласно данному аспекту, сжигание и/или трение контактирующих поверхностей вращательного элемента и качающегося элемента уменьшается.
Согласно дополнительному предпочтительному аспекту изобретения, вращательный элемент обеспечен эксцентриковым кулачком, который расположен в объединении с вращательным валом.
Согласно изобретению, предоставляется приводной инструмент, который эффективно улучшен относительно принудительного приведения в движение динамического поглотителя колебаний.
Другие цели, признаки и преимущества изобретения будут очевидны после прочтения последующего подробного описания в соединении с прилагаемыми чертежами и формулой изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 показывает вид в поперечном сечении общей конструкции электрического отбойного молотка в соответствии с вариантом осуществления настоящего изобретения.
Фиг.2 показывает вид в поперечном сечении динамического поглотителя колебаний и окружающую область динамического поглотителя колебаний, в которой двигатель и передача и подобное не показаны.
Фиг.3 показывает вид в поперечном сечении, взятый по линии A-A фиг.2.
Фиг.4 показывает вид в поперечном сечении, взятый по линии B-B фиг.3.
Фиг.5 показывает вид снизу фиг.2.
Фиг.6 показывает вид в поперечном сечении, взятый по линии D-D фиг.5.
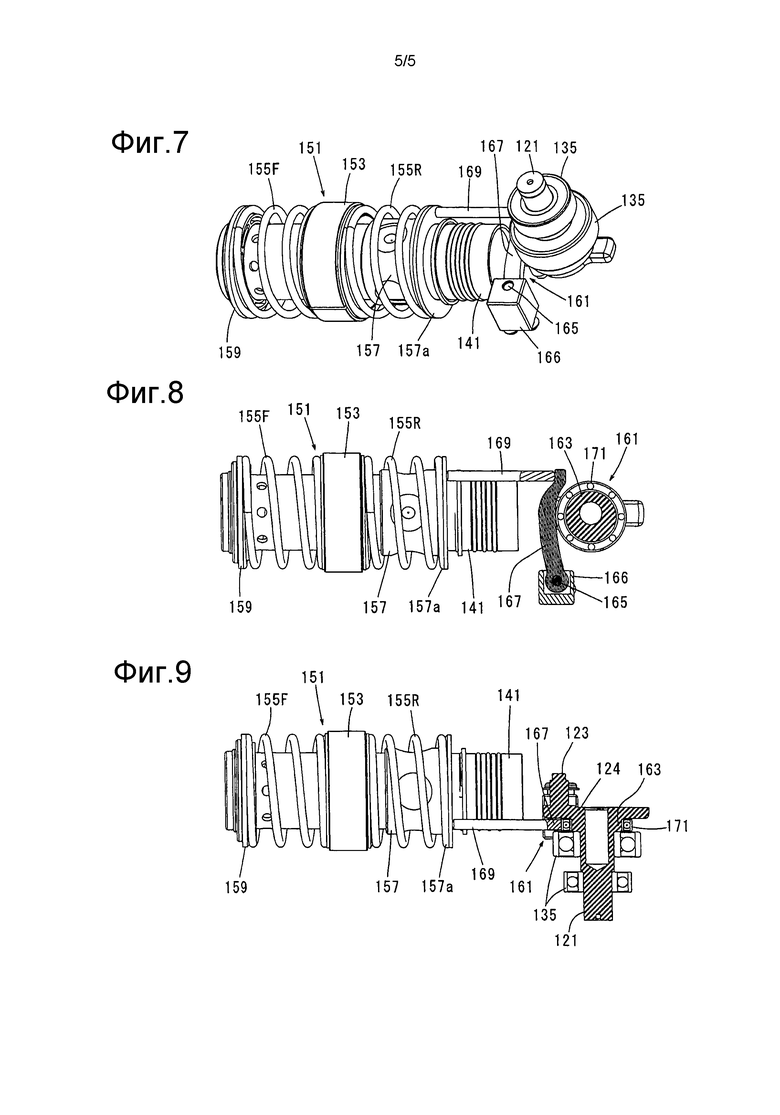
Фиг.7 показывает вид в перспективе механизма создания принудительных колебаний динамического поглотителя колебаний.
Фиг.8 показывает вид в частичном поперечном сечении механизма создания принудительных колебаний динамического поглотителя колебаний.
Фиг.9 показывает повернутый на 90 градусов вид в частичном поперечном сечении механизма вызова принудительных колебаний фиг.8.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Каждый из дополнительных признаков и этапов способа, раскрытых выше и ниже, может использоваться по отдельности или в соединении с другими признаками и этапами способа, чтобы предоставить и произвести улучшенные приводные инструменты и способы для использования таких приводных инструментов и используемые в них устройства. Показательные примеры изобретения, в которых использовались многие из этих дополнительных признаков и этапов способа в соединении, теперь будут описаны подробно со ссылкой на чертежи. Подробное описание предназначено исключительно для того, чтобы обучить специалиста в данной области техники дополнительным подробностям для практического осуществления предпочтительных аспектов настоящих идей, и не предназначено для ограничения объема изобретения. Лишь формула изобретения определяет объем заявленного изобретения. Следовательно, соединения признаков и этапов, раскрытых в нижеследующем подробном описании, могут не быть необходимыми для практического осуществления изобретения в самом широком смысле и вместо этого приведены исключительно для конкретного описания некоторых показательных вариантов осуществления изобретения, подробное описание которого теперь будет приведено со ссылкой на сопроводительные чертежи.
Вариант осуществления изобретения будет объяснен со ссылкой на фиг.1-9. В данном варианте осуществления изобретение будет объяснено посредством применения к электрическому отбойному молотку как одному из примеров приводного инструмента. Как показано на фиг.1, электрический отбойный молоток 101 главным образом снабжен корпусом 103, держателем 137 инструмента, долотом 119 и рукояткой 109. Корпус 103 определяется как корпус приводного инструмента, который составляет оболочку электрического отбойного молотка 101. Держатель 137 инструмента расположен в передней части (левой стороне фиг.1) корпуса 103 в продольном направлении корпуса 103. Долото 119 приспособлено с возможностью отсоединения соединяться с держателем 137 инструмента. Рукоятка 109 определяется как главная ручка, за которую держится пользователь, которая расположена в противоположной части (правая сторона фиг.1) относительно долота 119 в продольном направлении корпуса 103. Долото 119 соответствует инструменту изобретения. Долото 119 удерживается держателем 137 инструмента с тем, чтобы долото 119 было обоюдно подвижным против держателя 137 инструмента относительно продольного направления корпуса 103 и управлялось, чтобы относительно вращаться против держателя 137 инструмента относительно направления окружности держателя 137 инструмента. Далее в материалах настоящей заявки сторона, в которой расположено долото 119, называется передней стороной электрического отбойного молотка 101, а другая сторона, в которой расположена рукоятка 109, называется задней стороной электрического отбойного молотка 101.
Корпус 103 главным образом обеспечен главным корпусом 105 и цилиндрическим корпусом 107. Главный корпус 105 вмещает приводной двигатель 111 и механизм 113 преобразования движения. Цилиндрический корпус 107 сформирован примерно в цилиндрической форме и вмещает ударный элемент 115. Приводной двигатель 111 расположен таким образом, что его ось вращения тянется в вертикальном направлении фиг.1 и пересекает продольное направление корпуса 103. А именно, вращательная ось приводного двигателя 111 пересекает продольное направление корпуса 103. Вращательный выход приводного двигателя 111 преобразуется в линейное движение механизмом 113 преобразования движения и передается ударному элементу 115, и таким образом формируется ударная сила долота 119 через ударный элемент 115 в продольном направлении долота 119. Механизм 113 преобразования движения и ударный элемент 115 соответствуют приводному механизму изобретения. Цилиндрический корпус 107 расположен в переднем конце главного корпуса 105 и тянется в продольном направлении долота 119.
Рукоятка 109 расположена, чтобы быть протяженной и пересекать продольное направление долота 119, и имеет соединительные части. Соединительные части, которые выступают по направлению передней стороны электрического отбойного молотка 101, расположены в верхнем конце и нижнем конце рукоятки 109. Рукоятка 109 соединена с корпусом в верхней части и нижней части, следовательно, рукоятка 109 показана в значительной степени в D-образной форме на виде сбоку. Переключатель 131 и управляемый элемент 133 расположены в верхней части рукоятки 109. Переключатель 131 может перемещаться между положением ВКЛ и положением ВЫКЛ, когда пользователь сдвигает управляемый элемент 133. Приводной двигатель 111 приводится в действие движением переключателя 131.
Механизм 113 преобразования движения преобразует вращательное движение приводного двигателя 111 в линейное движение и передает линейное движение ударному элементу 115. Механизм 113 преобразования движения главным образом обеспечен кривошипно-шатунным механизмом, который содержит кривошипный вал 121, эксцентриковый шип 123, шатун 125 и поршень 127 и так далее. Кривошипный вал 121 приводится в движение приводным двигателем 111 через множество передач, и тем самым кривошипный вал 121 замедляется. Эксцентриковый шип 123 расположен в эксцентрическом положении, которое расположено вне вращательного центра кривошипного вала 121. Шатун 125 соединен с кривошипным валом 121 через эксцентриковый шип 123. Поршень 127 линейно приводится в движение шатуном 125. Поршень 127 с возможностью сдвига расположен в цилиндре 141, таким образом, поршень 127 перемещается линейно вдоль цилиндра 144 в соответствии с работой приводного двигателя 111. Кривошипный вал 121 соответствует вращательному валу изобретения.
Ударный элемент 115 главным образом обеспечен бойком 143 и ударным стержнем 145. Боек 143 определяется как ударный элемент и располагается в цилиндре 141, таким образом, боек 143 может сдвигаться в контакте с внутренней поверхностью цилиндра 141. Ударный стержень 145 определяется как промежуточный элемент, который передает энергию движения бойка 143 долоту 119, располагается, чтобы быть сдвигаемым относительно держателя 137 инструмента. Воздушная камера 141a формируется между поршнем 127 и бойком 143 внутри цилиндра 141. Боек 143 приводится в движение с помощью пневматической рессоры воздушной камеры 141a в соответствии со скользящим движением поршня 127 и ударяет по ударному стержню 145, который расположен с возможностью сдвига относительно держателя 137 инструмента. Следовательно, ударная энергия передается долоту 119 через ударный стержень 145.
Что касается электрического отбойного молотка 101, описанного выше, когда приводной двигатель 111 приводится в действие, поршень 127 смещается линейно вдоль цилиндра 141 с помощью механизма 113 преобразования движения, который главным образом обеспечен кривошипно-шатунным механизмом. Когда поршень 127 сдвигается, боек 143 перемещается по направлению передней стороны в цилиндре 141 посредством эффекта пневматической рессоры воздушной камеры 141a цилиндра 141. Затем боек 143 ударяет по ударному стержню 145, таким образом, энергия движения передается долоту 119. Когда пользователь прикладывает прижимающее усилие по направлению передней стороны корпуса 103, и долото 119 прикладывается к обрабатываемой детали, долото 119 выполняет операцию обработки молотком на обрабатываемой детали, такой как бетон.
Будет объяснен динамический поглотитель 151 колебаний, который смягчает колебания корпуса 103, когда электрический отбойный молоток 101 работает, и механизм 161 создания механических принудительных колебаний, который механически и принудительно вызывает движение динамического поглотителя 151 колебаний. В материалах настоящей заявки принудительное создание движения динамического поглотителя 151 колебаний называется принудительным созданием колебаний. Как показано на фиг.2, фиг.7-фиг.9, динамический поглотитель 151 колебаний главным образом обеспечен грузом 153 и пружинами 155F, 155R. Груз 153 расположен с тем, чтобы по окружности окружать внешнюю поверхность цилиндра 141. Пружины 155F, 155R соответственно расположены в передней стороне и в задней стороне груза 153 относительно продольного направления долота 119. Динамический поглотитель 151 колебаний расположен во внутреннем пространстве цилиндрического корпуса 107 корпуса 103 (ссылка на фиг.1). Пружины 155F, 155R соответственно прикладывают упругую силу к грузу 153 с передней стороны и задней стороны груза 153, когда груз 153 смещается в продольном направлении долота 119. Пружины 155F, 155R соответствуют упругому элементу изобретения.
Центр масс груза 153 расположен так, чтобы находиться на одной линии с продольной осью долота 119. Внешняя поверхность груза 153 с возможностью смещения расположена вдоль цилиндрического корпуса 107 в состоянии, в котором внешняя поверхность груза 153 находится в контакте с внутренней поверхностью цилиндрического корпуса 107. А именно, внутренняя поверхность цилиндрического корпуса 107 определяется как направляющая поверхность, которая направляет линейное движение корпуса 153. Подобно грузу 153 соответствующие центры масс пружин 155F, 155R расположены соответственно с тем, чтобы находиться на одной линии с продольной осью долота 119. Один конец (задний конец) пружины 155R приспособлен, чтобы контактировать с передней поверхностью кромки 157a выдвижной гильзы 157, представленной в качестве сдвигающегося элемента, а другой конец (передний конец) пружины 155R приспособлен, чтобы контактировать с задним концом груза 153 относительно продольного направления. Один конец (задний конец) пружины 155F приспособлен, чтобы контактировать с передним концом груза 153, а другой конец (передний конец) пружины 155F приспособлен, чтобы контактировать с имеющим форму кольца элементом 159 приема пружины, который расположен в передней стороне цилиндра 141 и фиксирован на внешней поверхности цилиндра 141.
Выдвижная гильза 157 определяется как передающий элемент, который передает приводную силу механизма 161 вызова принудительных колебаний грузу 153 через пружину 155R. Выдвижная гильза 157 с возможностью сдвига соединяется с внешней поверхностью цилиндра 141 относительно продольного направления долота 119 и сдвигается механизмом 161 вызова принудительных колебаний.
Как показано на фиг.3, механизм 161 создания принудительных колебаний главным образом обеспечен эксцентриковым кулачком 163, опорным валом 165, качающимся рычагом 167 и штифтом 169 передачи энергии. Эксцентриковый кулачок 163 расположен на кривошипном валу 121, таким образом, эксцентриковый кулачок 163 полностью вращается вместе с кривошипным валом 121. Качающийся рычаг 167 приводится в движение вращательным движением эксцентрикового кулачка 163 и раскачивается вперед-назад вокруг опорного вала 165, как точки опоры качания. Штифт 169 передачи энергии передает грузу 153 компонент движения относительно продольного направления долота 119 качающегося движения качающегося рычага 167.
Как показано на фиг.2, кривошипный вал 121 проходит в вертикальном направлении, пересекающем продольное направление долота 119. Одна из множества передач 122 (ссылка на фиг.1), которая передает вращательный выход приводного двигателя 111 кривошипному валу 121, фиксируется на одной стороне в направлении оси кривошипного вала 121. Кривошипный диск 124, который соединяет эксцентриковый шип 123 и кривошипный вал 121, расположен на одной стороне в направлении оси кривошипного вала 121. Кривошипный вал 121 с возможностью вращения поддерживается главным корпусом с помощью двух шариковых подшипников 135, расположенных между одной стороной и другой стороной кривошипного вала 121. Часть между одной стороной и другой стороной в направлении оси кривошипного вала 121 соответствует промежуточной части изобретения. Кривошипный диск 124 и эксцентриковый шип 123 соответствуют части приведения в действие инструмента изобретения.
Как показано на фиг.3, эксцентриковый кулачок 163 сформирован в форме дискового элемента, центр которого расположен в эксцентрическом положении, которое расположено вне вращательного центра кривошипного вала 121. Как показано на фиг.2, эксцентриковый кулачок 163 расположен между кривошипным диском 124 и одним из шариковых подшипников 135 вместе с кривошипным валом 121. Подшипник 171 качения соединен с периферией эксцентрикового кулачка 163.
Как показано на фиг.3, качающийся рычаг 167 расположен впереди кривошипного вала с тем, чтобы тянуться в боковом направлении, пересекающем как продольное направление кривошипного вала 121, так и продольное направление долота 119. Один конец качающегося рычага 167 с возможностью смещения поддерживается опорным валом 165. Передняя поверхность дальнего конца качающегося рычага 167 контактирует со штифтом 169 передачи энергии. Задняя поверхность промежуточной части между одним концом и дальним концом качающегося рычага 167 контактирует с периферией подшипника 171 качения. Качающийся рычаг 167 соответствует качающемуся элементу изобретения. Дальний конец качающегося рычага 167, который контактирует со штифтом 169 передачи энергии, соответствует части приведения в движение изобретения. Промежуточная часть качающегося рычага 167, которая контактирует с подшипником 171 качения, соответствует приводимой в движение части изобретения.
Опорный вал 165 поддерживается опорой 166. Качающийся рычаг 167 и опора 166 соединены вместе с помощью опорного вала 165. Как показано на фиг.5 и фиг.6, соединение качающегося рычага 167 и опоры 166 установлено и фиксировано на главном корпусе 108 посредством фиксации опоры 166 посредством фиксирующего средства, такого как шуруп 166a, и так далее.
Как показано на фиг.3, штифт 169 передачи энергии с возможностью смещения вставлен в отверстие 105a вставки штифта, которое обеспечено в главном корпусе 105 с тем, чтобы проходить линейно в продольном направлении долота 119. Один конец (задний конец) относительно продольного направления штифта 169 передачи энергии приспособлен, чтобы контактировать с передней поверхностью дальнего конца качающегося рычага 167, а другой конец (передний конец) относительно продольного направления штифта 169 передачи энергии приспособлен, чтобы контактировать с задней поверхностью кромки 157a выдвижной гильзы 157. Задний конец штифта 169 передачи энергии сформирован сферически.
Поведение электрического отбойного молотка 101, описанного выше, будет объяснено ниже. Во время операции обработки молотком посредством использования электрического отбойного молотка 101 ударные и частые колебания относительно долота 119 формируются на корпусе 103. Динамический поглотитель 151 колебаний в данном варианте осуществления пассивно смягчает колебания корпуса 103 посредством совместной работы груза 153 и пружин 155F, 155R. Следовательно, колебания, формируемые на корпусе 103 электрического отбойного молотка 101, эффективно уменьшаются. Во время операции обработки молотком, например, пользователь выполняет операцию обработки молотком, прижимая электрический отбойный молоток 101 к обрабатываемой детали. При таких обстоятельствах, из-за того что к долоту 119 прикладывается большая нагрузка, колебания, которые являются входом в динамический поглотитель 151 колебаний, регулируются.
Что касается режима функционирования, описанного выше, колебания корпуса 103 эффективно уменьшаются посредством вызова принудительных колебаний динамического поглотителя 151 колебаний. А именно, когда кривошипный вал 121 вращается, эксцентриковый кулачок 163 полностью вращается вместе с кривошипным валом 121. Затем качающийся рычаг 167 качается вперед-назад эксцентриковым кулачком 163. Когда качающийся рычаг 167 качается вперед, выдвижная гильза 157 подвергается давлению и перемещается вперед посредством штифта 169 передачи энергии, таким образом, пружины 155F, 155R сжимаются. Когда качающийся рычаг 167 качается назад, выдвижная гильза 157 перемещается назад посредством смещающей силы пружин 155F, 155R.
Таким образом, во время операции обработки молотком груз 153 динамического поглотителя 151 колебаний активно приводится в движение с помощью пружин 155F, 155R посредством механизма 161 вызова принудительных колебаний. Соответственно динамический поглотитель 151 колебаний представлен как механизм смягчения колебаний, который активно приводит в движение груз 153. В результате, колебания относительно продольного направления долота 119, формируемые во время операции обработки молотком на корпусе 103, эффективно уменьшаются.
Согласно данному варианту осуществления, выдвижная гильза 157 приводится в движение посредством механизма 161 вызова принудительных колебаний, таким образом, груз 153 активно приводится в движение с помощью пружины 155R. Следовательно, приспосабливая время приведения в движение груза 153 посредством механизма 161 вызова принудительных колебаний, чтобы уменьшить ударные колебания, формируемые на корпусе 103, когда долото 119 подвергается удару через боек 143 и ударный стержень 145, эффект смягчения колебаний грузом 153 достигается на основании предпочтительной конфигурации.
Дополнительно, согласно данному варианту осуществления, механизм 161 вызова принудительных колебаний приспособлен, чтобы содержать эксцентриковый кулачок на кривошипном валу 121 для ударного воздействия на долото 119, таким образом, груз 153 динамического поглотителя 151 колебаний приспособлен, чтобы приводиться в движение эксцентриковым кулачком 163 с помощью качающегося рычага 167 и штифта 169 передачи энергии. А именно, механизм 161 вызова принудительных колебаний приспособлен, чтобы быть объединенным с кривошипно-шатунным механизмом для операции обработки молотком. По сравнению с известным строением, в котором кривошипно-шатунный механизм для операции обработки молотком и кривошипно-шатунный механизм для механизма вызова принудительных колебаний расположены на одной линии друг в друге в их продольном направлении, механизм 161 вызова принудительных колебаний упрощен и облегчен. Следовательно, общая стоимость электрического отбойного молотка 101 снижается. Дополнительно, из-за того что механизм 161 создания принудительных колебаний расположен в пределах длины кривошипного вала 121, по сравнению с известным строением, размер относительно продольного направления кривошипного вала уменьшается.
Дополнительно, согласно данному варианту осуществления, из-за того что опорный вал 165, который составляет точку опоры качающегося движения качающегося рычага 167, установлен, чтобы проходить параллельно вращательной оси эксцентрикового кулачка 163, вращательное движение эксцентрикового кулачка 163 разумно изменяется в качающееся движение качающегося рычага 167.
Дополнительно, согласно данному варианту осуществления, смещение груза 153 определяется приспособлением смещения качающегося рычага 167 и/или расстоянием смещения эксцентрикового кулачка 163.
Дополнительно, согласно данному варианту осуществления, как показано на фиг.3, промежуточная часть относительно направления протяжения качающегося рычага 167 контактирует с подшипником 171 качения. Следовательно, расстояние между центром опорного вала 165 и контактной частью 167b, которая контактирует со штифтом 169 передачи энергии, больше, чем расстояние между центром опорного вала 165 и контактной частью 167a, которая контактирует c эксцентриковым кулачком 163. Соответственно, груз 153 динамического поглотителя 151 колебаний приводится в движение с помощью увеличенного смещения, которое увеличивается из-за эксцентрического расстояния эксцентрикового кулачка 163.
Дополнительно, согласно данному варианту осуществления, из-за того что подшипник 171 качения расположен на периферии эксцентрикового кулачка 163, сжигание и/или трение контактирующих поверхностей качающегося рычага 167 и подшипника 171 качения снижается.
Электрический отбойный молоток 101 был объяснен как один из примеров приводного инструмента в данном варианте осуществления, однако он не ограничен электрическим отбойным молотком 101. Например, изобретение может применяться к перфоратору, содержащему долото 119, которое выполняет ударное движение и вращательное движение. Вдобавок изобретение может применяться к лобзику или сабельной пиле, которые выполняют операцию разрезания посредством линейного перемещения лезвия по обрабатываемой детали.
Описание ссылочных номеров
101 электрический отбойный молоток
103 корпус
105 главный корпус
107 цилиндрический корпус
109 рукоятка
111 приводной двигатель
113 механизм преобразования движения
115 ударный элемент
119 долото
121 кривошипный вал
122 передача
123 эксцентриковый шип
125 шатун
127 поршень
131 переключатель
133 управляемый элемент
135 шариковый подшипник
137 держатель инструмента
141 цилиндр
143 боек
145 ударный стержень
151 динамический поглотитель колебаний
153 груз
155F пружина
155R пружина
157 выдвижная гильза
157a кромка
159 элемент приема пружины
161 механизм вызова принудительных колебаний
163 эксцентриковый кулачок
165 опорный вал
166 опора
166a шуруп
167 качающийся рычаг
167a контактная часть
167b контактная часть
169 штифт передачи энергии
171 подшипник качения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2011 |
|
RU2577639C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2008 |
|
RU2477211C2 |
| УДАРНЫЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2008 |
|
RU2478034C2 |
| ЭЛЕКТРОИНСТРУМЕНТ | 2009 |
|
RU2505390C2 |
| ИНЕРЦИОННО-УДАРНЫЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2006 |
|
RU2341366C2 |
| ИНСТРУМЕНТ УДАРНОГО ДЕЙСТВИЯ | 2010 |
|
RU2553175C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2009 |
|
RU2510326C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2008 |
|
RU2466854C2 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2005 |
|
RU2388590C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2009 |
|
RU2544971C2 |




Изобретение относится к приводному инструменту. Инструмент содержит приводной механизм, вращательный вал для приведения в действие приводного механизма, качающийся элемент, динамический поглотитель колебаний, вращательный элемент, выполненный за одно целое с вращательным валом с возможностью совместного вращения вместе с ним, и опорный вал, расположенный параллельно вращательному валу. Динамический поглотитель колебаний включает в себя груз, который может смещаться линейно в продольном направлении, и упругий элемент, который выполнен с возможностью смещения груза. Груз выполнен с возможностью механического и принудительного приведения в движение относительно продольного направления качающегося движения качающегося элемента при смещении груза упругим элементом. Качающийся элемент приспособлен, чтобы качаться относительно радиального направления вращательного движения вращательного элемента. Опорный вал поддерживает качающийся элемент как точка опоры, относительно которой осуществляется качающееся движение качающегося элемента. Качающийся элемент выполнен с возможностью качаться вдоль продольного направления вращательным движением вращательного вала. В результате упрощается конструкция приводного инструмента и уменьшается его вес. 5 з.п. ф-лы, 9 ил.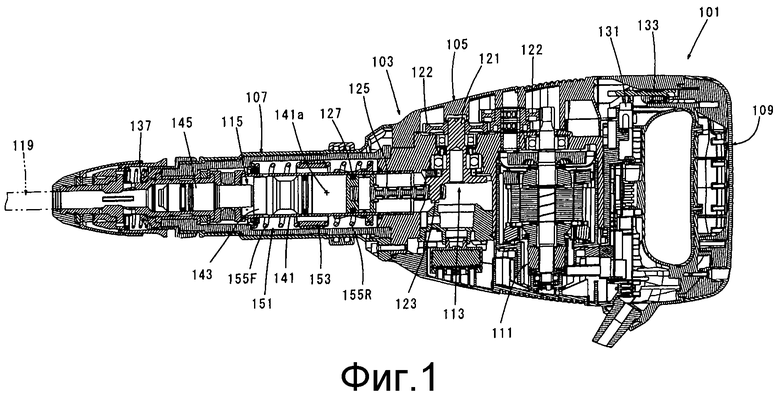
1. Приводной инструмент, выполненный с возможностью приведения инструмента в движение линейно в продольном направлении инструмента для выполнения предопределенной операции на обрабатываемой детали, содержащий:
приводной механизм для приведения инструмента в действие;
вращательный вал для приведения в действие приводного механизма;
качающийся элемент;
динамический поглотитель колебаний, который выполнен с возможностью смягчения колебаний, образуемых, когда инструмент выполняет предопределенную операцию,
при этом динамический поглотитель колебаний включает в себя груз, который может смещаться линейно в продольном направлении, и упругий элемент, который выполнен с возможностью смещения груза,
при этом груз выполнен с возможностью механического и принудительного приведения в движение относительно продольного направления качающегося движения качающегося элемента в состоянии, в котором груз смещается упругим элементом,
при этом
приводной инструмент дополнительно содержит вращательный элемент, выполненный за одно целое вращательным валом с возможностью совместного вращения вместе с ним,
при этом приводной инструмент дополнительно содержит опорный вал, расположенный параллельно вращательному валу,
отличающийся тем, что опорный вал поддерживает качающийся элемент как точка опоры, относительно которой осуществляется качающееся движение качающегося элемента,
при этом качающийся элемент приспособлен качаться относительно радиального направления вращательного движения вращательного элемента и выполнен с возможностью качания вдоль продольного направления вращательным движением вращательного вала.
2. Приводной инструмент по п.1, в котором центр вращательного элемента расположен в эксцентрическом положении, которое отстоит от центра вращательного движения вращательного вала,
и в котором смещение груза относительно продольного направления качающегося движения качающегося элемента определяется смещением качающегося элемента и расстоянием смещения вращательного элемента.
3. Приводной инструмент по п.2, в котором качающийся элемент включает в себя приводимую в движение часть, которая приводится в движение вращательным элементом, и приводную часть, которая приводит в движение груз,
и в котором расстояние между точкой опоры и приводимой в движение частью короче, чем расстояние между точкой опоры и приводной частью.
4. Приводной инструмент по п.1, дополнительно содержащий опору, которая поддерживает промежуточную часть вращательного вала в продольном направлении вращательного вала, которая может вращаться,
при этом вращательный вал включает в себя часть, приводящую инструмент в движение в продольном направлении вращательного вала и расположенную на одном конце вращательного вала,
и в котором вращательный элемент установлен между промежуточной частью и частью приведения инструмента в движение в продольном направлении вращательного вала.
5. Приводной инструмент по п.4, дополнительно содержащий подшипник качения, который установлен и размещен между вращательным элементом и качающимся элементом.
6. Приводной инструмент по п.1, в котором вращательный элемент содержит эксцентриковый кулачок, который соединен с вращательным валом.
| Способ триботехнических испытаний | 1991 |
|
SU1779979A1 |
| МАРКЕР ДЛЯ РЕЗОНАНСНОЙ СИСТЕМЫ ОБНАРУЖЕНИЯ (ВАРИАНТЫ) | 1993 |
|
RU2129733C1 |
| WO 2010128665 A1, 11.11.2010 | |||
| US 5337835 A, 16.08.1994 | |||
| Приспособление для монтажа и демонтажа пружин клапанов двигателей внутреннего сгорания | 1988 |
|
SU1600944A1 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2005 |
|
RU2388590C2 |

