ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение имеет отношение к системе активных маркеров позиции, содержащей, по меньшей мере, один активный маркер позиции и удаленный приемо-передающий модуль для установления связи с этим, по меньшей мере, одним маркером позиции, для использования в устройстве МР-томографии. Маркер позиции считается "активным" в том смысле, что он предназначен для приема МР-сигналов фактически только из локального объема после ВЧ возбуждения этого локального объема, причем этот объем, по меньшей мере, в значительной степени охватывает или, по меньшей мере, в значительной степени окружен маркером, или соседствует с маркером, так что на основании этих "локальных" МР-сигналов позиция маркера может быть определена и/или отображена при помощи устройства МР-томографии, в частности, в МР-изображении обследуемого объекта с нужной точностью.
Дополнительно, изобретение имеет отношение к медицинскому устройству в форме интервенционного или неинтервенционного инструмента, такого, как катетер, хирургическое устройство, игла для биопсии, стрелочный прибор или иное инвазивное или неинвазивное устройство, а также поверхностная ВЧ катушка, гибкая ВЧ катушка, головная ВЧ катушка, стереотаксическая рамка или любой другой инструмент, который может использоваться при генерировании МР-изображения, причем это медицинское устройство содержит такой активный маркер позиции в качестве встроенного модуля, чтобы определять и/или делать видимой его позицию в МР-изображении обследуемого объекта.
УРОВЕНЬ ТЕХНИКИ
Как известно, в системе МР-томографии (МРТ) или МР-сканере обследуемый объект, как правило, пациент, подвергается воздействию однородного постоянного магнитного поля (поле B0), так что магнитные моменты ядер в пределах обследуемого объекта формируют определенную результирующую намагниченность всех ядер, параллельных полю B0, которое может быть наклонено, что приводит к вращению вокруг оси приложенного поля B0 (ларморовская прецессия). Скорость прецессии называется ларморовской частотой, которая зависит от конкретных физических характеристик задействованных ядер, а именно, от их гиромагнитного отношения и напряженности приложенного поля B0. Гиромагнитное отношение представляет собой отношение между магнитным моментом и спином ядра.
В результате передачи ВЧ импульса возбуждения (поле B1), который ортогонален к полю B0, генерируемому при помощи ВЧ передающей антенны или катушки, и согласования ларморовской частоты исследуемых ядер, спины ядер возбуждаются и синхронизируются по фазе, и получается отклонение их результирующей намагниченности от направления поля B0, так что генерируется поперечная составляющая относительно продольной составляющей результирующей намагниченности.
После прекращения ВЧ импульса возбуждения, начинаются релаксационные процессы продольных и поперечных составляющих результирующей намагниченности, пока результирующая намагниченность не возвратится к своему равновесному состоянию, при этом T1 и T2 являются временами, необходимыми для продольного и поперечного намагничивания, соответственно, чтобы вернуться к 63% своего равновесного значения. МР-сигналы, которые генерируются прецессирующей намагниченностью, обнаруживаются при помощи ВЧ приемной антенны или катушки. Принимаемые МР-сигналы, которые являются временными сигналами с амплитудным кодированием, затем подвергаются преобразованию Фурье в частотные сигналы МР-спектра и обрабатываются для генерирования МР-изображения исследуемых ядер в пределах обследуемого объекта.
Для того чтобы получить пространственную селекцию среза или объема в пределах обследуемого объекта и пространственное кодирование принимаемых МР-сигналов, исходящих из исследуемого среза или объема, градиентные магнитные поля накладываются на поле B0, с тем же направлением, что и поле B0, но имея градиенты в ортогональных x-, y- и z-направлениях. Вследствие того что ларморовская частота зависит от напряженности магнитного поля, которое накладывается на ядра, ларморовская частота ядер соответственно уменьшается наряду с уменьшением градиента (и наоборот) в целом, наложенного поля B0, так что благодаря надлежащей настройке частоты передаваемого ВЧ импульса возбуждения (и благодаря надлежащей настройке резонансной частоты ВЧ/МР приемной антенны), а также за счет надлежащего управления градиентными магнитными полями, может быть получена селекция ядер в пределах среза при определенном положении вдоль каждого градиента в x-, y- и z-направлении, а тем самым, в итоге, в пределах определенного элемента объемного изображения объекта.
Медицинские инструменты или устройства, в частности, в форме интервенционных и неинтервенционных инструментов, оборудование и другое, как упоминалось выше, часто используются во время обследования или лечения обследуемого объекта, и в частности, его локальной зоны или области при помощи устройства МР-томографии. Такими медицинскими инструментами или устройствами являются, например, кардиостимуляторы, катетеры, иглы для биопсии, хирургические устройства, стрелочные приборы и другие, которые используются, например, для биопсии, термоабляций, брахитерапии, селекции срезов и других инвазивных или неинвазивных назначений, как упоминалось выше. Дополнительно, поверхностные ВЧ катушки, гибкие ВЧ катушки, головные ВЧ катушки, стереотаксические рамки и другие неинтервенционные инструменты тоже используются во время МР-томографии. Для всех этих и других обследований важно точно позиционировать инструмент, и в частности, определенную его часть или атрибут (типа его наконечника или осевой линии) в определенном нужном положении на обследуемом объекте или внутри него. Для этого требуется, чтобы во время позиционирования инструмента оператором текущая позиция инструмента или его интересующей части, в частности, его наконечника, точно определялась и отображалась или обозначалась в МР-изображении связанного с этим обследуемого объекта, чтобы можно было достичь нужного места назначения на обследуемом объекте или внутри него.
С этой целью, описанные выше инструменты или медицинские устройства могут оснащаться маркером позиции, имеющим локальную ВЧ катушку, позиция которой может быть отображена при помощи устройства МР-томографии в МР-изображении связанного с этим обследуемого объекта.
Требуемое точечное обозначение позиции, и тем самым требуемая точность обозначения позиции, может быть получено или задавая размер локальной ВЧ катушки настолько малым, чтобы она принимала ("локальные") МР-сигналы фактически только (но с достаточным уровнем МР-сигнала) из соответственно небольшого или точечного локального объема обследуемого объекта, и/или обеспечивая небольшой или точечный локальный объем в форме маркирующего вещества (например, 19F, 13C, 23Na или другого), имеющего гиромагнитное отношение и, соответственно, ларморовскую частоту, отличные от гиромагнитного отношения и ларморовской частоты вещества обследуемого объекта (обычно вода и жир), чтобы при ВЧ возбуждении только этого локального объема возбужденные ("локальные") МР-сигналы обеспечивали точечный источник сигнала, который может быть отображен в МР-изображении обследуемого объекта. В последнем случае, более подробно, с помощью первой последовательности ВЧ импульсов определяются данные позиционирования маркирующего вещества, а с помощью второй последовательности ВЧ импульсов определяются данные изображения обследуемого объекта, а затем оба набора данных демонстрируются в виде общего МР-изображения.
Вообще, можно выделить два разных типа таких маркеров позиции, а именно активные и пассивные маркеры. Активные маркеры, как оговаривалось выше, обычно содержат датчик, в частности, в виде локальной ВЧ катушки для приема упомянутых локальных МР-сигналов, испускаемых из локального объема, причем эти локальные МР-сигналы переносятся посредством кабеля на удаленный МР-приемник устройства МР-томографии для того, чтобы определить и/или отобразить позицию локального объема, и тем самым позицию маркера, исходя из принятого локального МР-сигнала, как объяснялось выше.
В отличие от этого, пассивные маркеры обычно отображаются в МР-изображении, например, за счет искажения, увеличения или изменения вследствие их физических свойств или вследствие собственного (внутреннего) ВЧ резонанса (который возбуждается приложенным внешним ВЧ полем возбуждения), при этом поле B0 или ВЧ поле возбуждения передается устройством МР-томографии, и за счет этого обследуемым объектом испускаются МР-сигналы.
Все эти основные положения дают возможность определения позиции и визуализации активного (и пассивного) маркера, соответственно, вместе с приложенными градиентными магнитными полями в пределах МР-изображения обследуемого объекта, как объяснялось выше.
Тем не менее, одним из основных недостатков вышеупомянутых активных маркеров и интервенционных и неинтервенционных инструментов, содержащих такой активный маркер, является то, что необходимо соединение с помощью ВЧ кабеля для подачи принимаемых МР-сигналов от активного маркера на удаленный МР-приемник или устройство МР-томографии. С одной стороны, такой кабель сокращает удобство и сценарий использования и привносит угрозы механической безопасности, особенно в случае интервенционного инструмента, ограничивает гибкость обращения, и увеличивает время, необходимое для подготовки процедуры МР-томографии. С другой стороны, (металлический) кабель для соединения активного маркера позиции с МР-приемником обычно должен направляться внутрь и сквозь пространство обследования устройства МР-томографии, так что это вызывает потенциальную угрозу безопасности из-за резонансных синфазных токов, которые наводятся на кабеле ВЧ полем возбуждения, испускаемым связанной передающей ВЧ антенной устройства МР-томографии.
Документ WO 2006/103635 раскрывает интервенционное устройство, которое соединяется при помощи кабеля с удаленным спектрометром, для проведения информационного сигнала от интервенционного устройства к спектрометру. Синфазные резонансы на кабеле устраняются путем разделения кабеля на несколько емкостно-связанных частей кабеля. Результирующее затухание информационного сигнала компенсируется усилением сигнала при помощи параметрического усилителя, входящего в состав интервенционного устройства, при этом сигнал накачки доставляется от спектрометра на параметрический усилитель по кабелю для преобразования частоты информационного сигнала в более высокую частоту, которая подвергается меньшему затуханию в кабеле.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Одна задача, лежащая в основе настоящего изобретения, состоит в устранении вышеупомянутых недостатков активного маркера позиции и предоставлении такого активного маркера позиции в простом виде, чтобы с ним можно было легко и гибко обращаться, не привнося вышеупомянутые угрозы безопасности.
Эта задача решается с помощью активного маркера позиции по п. 1 формулы изобретения, в особенности в сочетании с приемо-передающим модулем по п. 9 формулы изобретения, и системой активных маркеров позиции по п. 13 формулы изобретения.
Преимущество использования параметрического усилителя для усиления принимаемого МР-сигнала и повышающего преобразования частоты этого сигнала состоит в том, что это может проводиться с очень низким шумом. Дополнительно, это может быть реализовано очень простой структурой схем с небольшими затратами, также вследствие того факта, что были выявлены требования к динамическому диапазону, линейности, синхронизации и другим параметрам передачи МР-сигнала, который используется для целей определения позиции или отслеживания, не являющиеся столь высокими, как в случае МР-сигнала, который используется для генерирования МР-изображения обследуемого объекта.
Преимущество передачи МР-сигнала, особенно в преобразованной с повышением полосе сверхвысоких частот, состоит в том, что в случае использования кабеля для соединения активного маркера позиции с удаленным приемо-передающим модулем такой кабель может быть реализован в форме сверхвысокочастотного кабеля, имеющего очень маленький диаметр. Возможные ВЧ синфазные токи на сверхвысокочастотном кабеле можно уменьшить или устранить сравнительно простым способом, включая конденсаторы последовательно в кабель, что общеизвестно из вышеупомянутого документа WO 2006/103635, при этом передача преобразованного с повышением МР-сигнала по кабелю существенно не ослабляется такими конденсаторами.
Другое преимущество вышеупомянутой (беспроводной) передачи электромагнитных волн по сравнению с методами оптического наблюдения состоит в том, что основной принцип работы маркера позиции не меняется, т.е. нет отхода от основанного на МР метода. Таким образом, может быть легко организовано встраивание маркера позиции в обычный порядок выполнения МР-томографии и оперирования с данными. Дополнительно, все существующие способы и приложения по-прежнему могут использоваться.
Активный маркер позиции может быть предоставлен в виде отдельного (автономного) модуля для подсоединения его к интервенционному или неинтервенционному инструменту или к обследуемому объекту с целью определения и/или отображения позиции или перемещения инструмента или обследуемого объекта, соответственно, при этом предпочтительно, если приемо-передающий модуль размещается на удалении от маркера позиции, либо опять же в виде автономного модуля, который подключается через стандартный интерфейс к МР-приемнику, либо встроенный в МР-приемник или в устройство МР-томографии.
Зависимые пункты формулы изобретения раскрывают предпочтительные варианты осуществления настоящего изобретения.
Следует понимать, что признаки настоящего изобретения допускают сочетание в любой комбинации, без отступления от объема настоящего изобретения, который определяется прилагаемой формулой изобретения.
Дополнительные детали, признаки и преимущества настоящего изобретения станут очевидными из последующего описания предпочтительных и иллюстративных вариантов осуществления настоящего изобретения, которые приводятся со ссылкой на чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
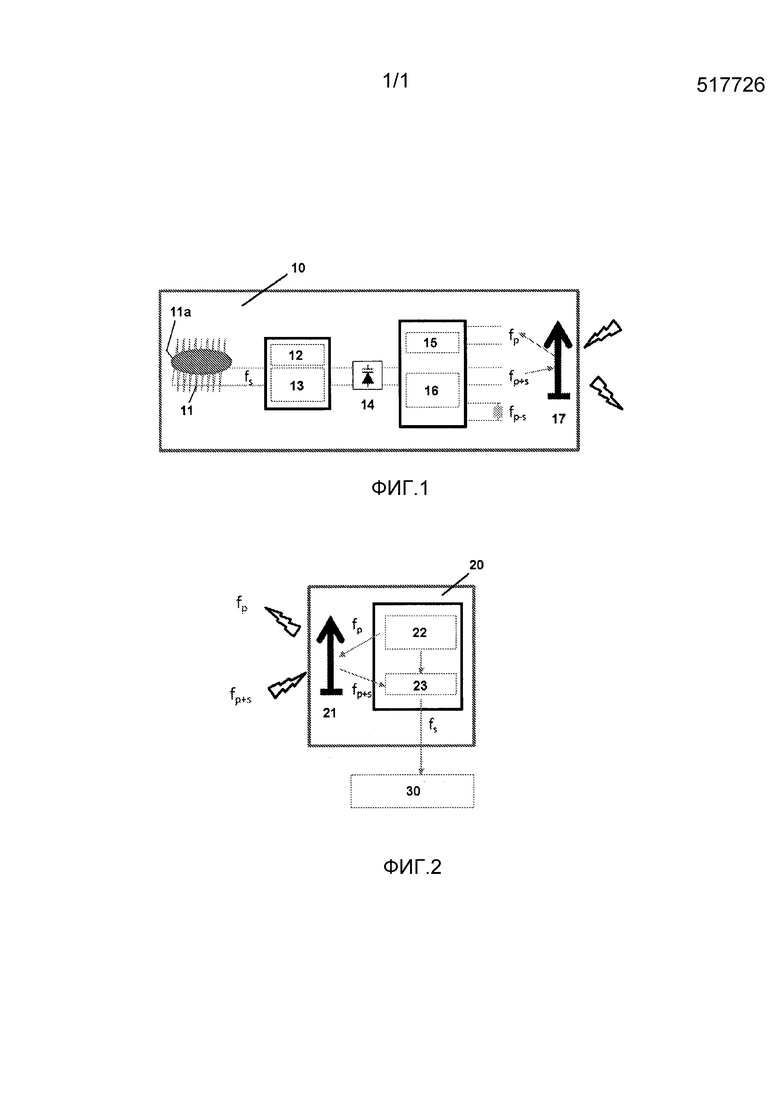
Фиг. 1 показывает схематичную структурную схему активного маркера позиции согласно варианту осуществления настоящего изобретения; и
Фиг. 2 показывает схематичную структурную схему удаленного приемо-передающего модуля согласно варианту осуществления настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 и 2 вместе показывают схематичную структурную схему компонентов системы активных маркеров позиции согласно первому варианту осуществления настоящего изобретения. По существу, система маркеров позиции содержит, по меньшей мере, один активный маркер 10 позиции согласно Фиг. 1 для приема, усиления, частотного повышающего преобразования и передачи локальных МР-сигналов, и удаленный приемо-передающий модуль 20 согласно Фиг. 2 для приема и частотного понижающего преобразования передаваемых локальных МР-сигналов и для доставки этих сигналов на модуль 30 обработки изображений устройства МР-томографии.
Согласно первому варианту осуществления, передача проводится беспроводным способом и предпочтительно в диапазоне сверхвысоких частот приблизительно от 1 до 300 ГГц, как, например, в полосе частот 2,4 ГГц или в другой из полос частот диапазона ISM, такой, как 24 ГГц, 61 ГГц, 122 ГГц или 244 ГГц и т.д. Однако теоретически могли бы использоваться также частоты и ниже диапазона сверхвысоких частот, но существенно выше, чем МР-частота (например, приблизительно от 400 МГц, в частности 500 МГц, до 1 ГГц). Это может быть полезно, если, например, необходимо значительное проникновение или передача передаваемых сигналов внутри/в пределах обследуемого объекта, такого, как человеческое тело (например, в случае интервенционных инструментов). Дальнейшие разъяснения, которые касаются передачи в диапазоне сверхвысоких частот, применимы к передаче в частотном диапазоне приблизительно от 400 МГц до 1 ГГц, соответственно.
По существу, активный маркер 10 позиции содержит ВЧ датчик, в частности, в виде локальной ВЧ катушки 11, которая охватывает локальный объем 11a, или окружена им, предпочтительно в виде маркирующего вещества (источник сигнала), для приема локального МР-сигнала, возбужденного в локальном объеме, как объяснялось выше, параметрический усилитель 14, содержащий нелинейное реактивное сопротивление, и, по меньшей мере, одну первую антенну 17. Предпочтительно, если первый фильтр 12 и первая согласующая цепь 13 подключается между ВЧ приемной катушкой 11 и параметрическим усилителем 14. Дополнительно, предпочтительно, если второй фильтр 15 и вторая согласующая цепь 16 подключается между параметрическим усилителем 14 и, по меньшей мере, одной первой антенной 17.
По существу, приемо-передающий модуль 20 содержит, по меньшей мере, одну вторую антенну 21, предпочтительно генератор 22 сигнала частоты накачки, и устройство 23 демодуляции, причем выход последнего соединяется с традиционным модулем 30 обработки изображений устройства МР-томографии.
В качестве альтернативы, вместо приемо-передающего модуля 20, активный маркер 10 позиции может содержать генератор сигнала частоты накачки, причем в этом случае предпочтительно, чтобы сигнал частоты накачки передавался от активного маркера 10 позиции на приемо-передающий модуль 20 для понижающего преобразования частоты принимаемого локального МР-сигнала посредством устройства (23) демодуляции.
Более конкретно, локальная ВЧ катушка 11, как общеизвестно и объяснялось выше, имеет настолько малые размеры, что она принимает МР-сигналы фактически только от упомянутого локального объема, так что информация о местоположении, которая определяется исходя из МР-сигнала fs, является достаточно точной для определения и отображения позиции локальной ВЧ катушки 11 в МР-изображении. Соответственно, локальный объем маркирующего вещества (если предусмотрено) имеет такие размеры, как объяснялось выше, чтобы быть настолько малым, чтобы его позиция (а тем самым позиция локальной ВЧ катушки 11, и тем самым маркера 10 позиции), могла быть определена или отображена фактически с точечной протяженностью, которая достаточно мала, чтобы получить нужную точность установления местонахождения в МР-изображении обследуемого объекта, но достаточно большая, чтобы МР-сигналы, которые принимаются из локального объема, позволяли определить позицию локальной ВЧ катушки 11, и тем самым маркера позиции.
Локальная ВЧ приемная катушка 11 может быть реализована, например, в виде соленоидальной катушки или тороидальной катушки, причем последняя обладает тем преимуществом, что уровень принимаемого ВЧ сигнала меньше зависит от ориентации (тороидальной) катушки, чем в случае соленоидальной катушки.
Дополнительно, локальная ВЧ приемная катушка 11 рассчитывается таким образом, что она может быть настроена, чтобы быть резонансной на связанной ларморовской частоте вещества в пределах локального объема, что общеизвестно, при этом предпочтительно, если ВЧ приемная катушка 11 соединена вместе с резонансным конденсатором в настраиваемый резонансный контур, что общеизвестно.
Локальный объем 11a может быть обеспечен объемом вещества обследуемого объекта, но предпочтительно, если содержит маркирующее вещество, обладающее гиромагнитным отношением и, соответственно, ларморовской частотой, которое отличается от гиромагнитного отношения, и тем самым от ларморовской частоты, вещества обследуемого объекта (обычно вода и/или жир), как объяснялось выше. Маркирующее вещество предпочтительно заключить в небольшой сосуд, и оно может представлять собой, например, 19F (или 13C, 23Na или другое) или, более обобщенно, воду с реагентом для сокращения или продления, в частности, времени T1 релаксации в сравнении со временем T1 релаксации вещества обследуемого объекта.
(Локальный) МР-сигнал fs, который порождается в локальной ВЧ приемной катушке 11, предпочтительно подвергнуть полосовой фильтрации с помощью первого фильтра 12 и предпочтительно выводить через первую цепь 13 согласования полного сопротивления на вход параметрического усилителя 14.
Параметрический усилитель 14 по существу содержит нелинейное реактивное сопротивление, реализованное с помощью нелинейной катушки индуктивности или нелинейного конденсатора, предпочтительно варакторного диода, причем величина нелинейного реактивного сопротивления периодически изменяется с помощью подаваемого сигнала fp частоты накачки, имеющего частоту в одном из вышеупомянутых диапазонов частот для передачи, чтобы подаваемый МР-сигнал fs был усилен посредством нелинейного смешения сигналов и понижающего преобразования частоты, что общеизвестно, в сигналы частот верхней и нижней боковой полосы, имеющие частоты: n*fp+/-m*fs.
Предпочтительно, если предусматривается источник напряжения смещения (не обозначен) для регулировки точки смещения варакторного диода, что общеизвестно.
Конечно, могут использоваться также и другие варианты осуществления параметрических усилителей.
Предпочтительно, если, по меньшей мере, один из двух сигналов fp+fs, fp-fs первого порядка частот верхней и нижней боковой полосы, выбирается и передается беспроводным способом посредством первой антенны 17 на приемо-передающий модуль 20.
Для того чтобы выбрать, по меньшей мере, один сигнал частоты верхней боковой полосы и/или, по меньшей мере, один сигнал частоты нижней боковой полосы, например, сигнал fp+fs верхней боковой полосы, а для прерывания или короткого замыкания сигналы другой боковой полосы, второй фильтр 15, соответственно, рассчитывается, как полосовой фильтр для этой частоты боковой полосы, и подключается между выходом усилителя 14 и первой антенной 17. Дополнительно, для согласования полного сопротивления выхода параметрического усилителя 14 или второго фильтра 15, соответственно, с первой антенной 17, предпочтительно, если вторая согласующая цепь 16 подключается между параметрическим усилителем 14 или вторым фильтром 15, соответственно, и первой антенной 17.
Выбранная боковая полоса преобразованного с повышением частоты МР-сигнала затем передается беспроводным способом с помощью первой антенны 17 на приемо-передающий модуль 20, где она принимается с помощью второй антенны 21 и подается на устройство 23 демодуляции.
В устройстве 23 демодуляции, принятая боковая полоса преобразованного с повышением частоты МР-сигнала преобразуется с понижением в частоту исходного МР-сигнала с помощью сигнала fp частоты накачки, который генерируется генератором 22 сигнала накачки, и доставляется на устройство 23 демодуляции. От выхода устройства 23 демодуляции, преобразованный с понижением (т.е. исходный) МР-сигнал представляется на традиционный модуль 30 обработки изображений устройства МР-томографии для определения позиции и генерирования изображения ВЧ приемной катушки 11.
Дополнительно, сигнал fp частоты накачки также переносится на вторую антенну 21 и передается беспроводным способом с помощью этой антенны 21 на активный маркер 10 позиции, где он принимается первой антенной 17.
В активном маркере 10 позиции, сигнал fp частоты накачки переносится, предпочтительно, через второй фильтр 15 и, предпочтительно, через вторую цепь 16 согласования полного сопротивления на параметрический усилитель 14 для усиления и повышающего частотного преобразования локального МР-сигнала fs, который принимается посредством локальной ВЧ приемной катушки 11, и переносится на усилитель 14, как упоминалось выше.
С этой целью дополнительный второй фильтр 15 рассчитан на полосовую фильтрацию принимаемого сигнала fp частоты накачки, а дополнительная вторая согласующая цепь 16 рассчитана на согласование полного сопротивления первой антенны 17 со вторым фильтром 15 или параметрическим усилителем 14, соответственно.
В случае если оба, по меньшей мере, один передаваемый сигнал fp+/-fs частот боковой полосы и принимаемый сигнал fp частоты накачки, должны быть подвергнуты полосовой фильтрации и согласованию полного сопротивления, предпочтительно, чтобы для обоих сигналов предусматривались собственный индивидуальный второй фильтр и собственная индивидуальная вторая согласующая цепь, которые рассчитаны на соответствующую частоту боковой полосы и частоту накачки, соответственно.
Первый и второй фильтр 12, 15, а также первая и вторая согласующая цепь 13, 16, могут быть реализованы элементами с сосредоточенными параметрами или выполнены в виде схем линий передачи, что общеизвестно.
Для повышения надежности беспроводной связи между активным маркером 10 позиции и приемо-передающим модулем 20 может использоваться больше одной первой и/или больше одной второй антенны 17, 21 в активном маркере 10 позиции и/или в приемо-передающем модуле 20, соответственно, которые работают, предпочтительно, в соответствии с известными принципами MIMO (многоканальный вход-многоканальный выход).
Дополнительно, надежность передачи локального МР-сигнала на приемо-передающий модуль 20 также может быть повышена за счет одновременной передачи больше одного преобразованных с повышением частоты сигналов боковой полосы (например, сигнал fp+fs, fp-fs первого порядка частот верхней и первого порядка частот нижней боковой полосы), предпочтительно, с помощью отдельной первой антенны для каждого сигнала боковой полосы. Предпочтительно, если эти сигналы боковой полосы принимаются с помощью отдельной второй антенны для каждой частоты боковой полосы и параллельно подвергаются понижающему преобразованию, чтобы выбрать для дополнительной обработки изображения тот из принимаемых локальных МР-сигналов, который имеет самый высокий уровень сигнала или самое высокое отношение сигнал-шум.
Дополнительно, для различения двух или более активных маркеров 10 позиции, которые используются в одно время, каждая из различных частот fp+fs, fp-fs, n*fp+m*fs, … боковой полосы может использоваться и передаваться единственным активным маркером 10 позиции, и/или сигналы накачки, имеющие различные частоты, могут генерироваться и передаваться приемо-передающим модулем 20, чтобы на основании частоты преобразованных с повышением сигналов боковой полосы, которые принимаются приемо-передающим модулем 20, мог быть идентифицирован каждый из активных маркеров 10 позиции. С этой целью, например, в приемо-передающем модуле 20 хранится связанная справочная таблица с указанием связанной частоты каждого активного маркера позиции, так что каждый идентификационный сигнал, обозначающий каждый отдельный активный маркер позиции, может генерироваться и представляться вместе со связанным принимаемым МР-сигналом на модуль 30 обработки изображений. Соответственно, первые и вторые фильтры и согласующие цепи 12, 13; 15, 16 в активных маркерах 10 позиции рассчитываются в соответствии с назначенной частотой накачки и/или частотой боковой полосы.
В качестве примера, предполагается сигнал fp накачки с частотой 2,4 ГГц, который генерируется с помощью генератора 22 сигнала накачки приемо-передающего модуля 20 и передается с помощью второй антенны 21 на первую антенну 17. Принимаемый сигнал fp частоты накачки подается, предпочтительно, через второй фильтр 15 и вторую согласующую цепь 16, как объяснялось выше, на параметрический усилитель 14, где он смешивается с локальным МР-сигналом с 128 МГц, принимаемым локальной ВЧ приемной катушкой 11, так что генерируется преобразованный с повышением частоты сигнал нижней боковой полосы с 2,272 ГГц и преобразованный с повышением частоты сигнал верхней боковой полосы с 2,528 ГГц. Принимая во внимание, что, например, сигнал нижней боковой полосы является незамкнутым или короткозамкнутым или прерванным в зависимости от полного сопротивления, сигнал верхней боковой полосы подается, предпочтительно, через второй фильтр 15 и вторую согласующую цепь 16 на первую антенну 17 и передается на приемо-передающий модуль 20 для аналогичного понижающего преобразования с помощью устройства 23 демодуляции, как объяснялось выше. Преобразованный с понижением локальный МР-сигнал доставляется на модуль 30 обработки изображений устройства МР-томографии для определения и отображения позиции локальной ВЧ приемной катушки 11 активного маркера 10 позиции в МР-изображении обследуемого объекта, как объяснялось выше. Для повышения надежности передачи МР-сигнала, оба сигнала боковой полосы могут передаваться, преобразовываться с понижением и выбираться для обработки изображения, как объяснялось выше.
Приемо-передающий модуль 20 может быть либо реализован в виде дополнительного устройства, как показано на Фиг. 2, либо он может быть выполнен в составе системы МР-томографии. В первом случае, он соединяется с системой МР-томографии через стандартный интерфейс, предпочтительно, таким же образом, как стандартная МР приемная катушка, для приема МР-сигналов обследуемого объекта.
Система активных маркеров позиции согласно второму варианту осуществления настоящего изобретения отличается от вышеописанного первого варианта осуществления тем, что вместо беспроводного соединения предоставляется первый кабельный интерфейс в активном маркере 10 позиции и предоставляется второй кабельный интерфейс в удаленном приемо-передающем модуле 20, для соединения обоих друг с другом посредством кабеля, при этом, по меньшей мере, одна первая и вторая антенна 17, 21 может быть опущена. По меньшей мере, один из кабельных интерфейсов может быть реализован в виде штепсельного разъема для подключения и отключения кабеля в активном маркере позиции и/или в приемо-передающем модуле, и/или, по меньшей мере, один из кабельных интерфейсов реализуется в виде постоянного кабельного соединения, которое не может быть отключено от активного маркера позиции и/или от приемо-передающего модуля.
Предпочтительно, если передача проводится в вышеуказанном диапазоне сверхвысоких частот, потому что в этом случае подавление синфазных токов на сверхвысокочастотном кабеле может быть реализовано гораздо проще, и в меньших размерах (например, как раскрыто в вышеуказанном документе WO 2006/103635), так что с ним можно обращаться намного гибче, чем в случае обыкновенного кабеля для диапазона МР-частот, для которого требуются заграждающие фильтры и преобразователи, интегрированные в кабель. С другой стороны, потери в (высокочастотном) кабеле, как правило, возрастают с увеличением частоты, так что может иметь место случай, когда предпочтительна передача через кабель на частотах ниже диапазона сверхвысоких частот (например, приблизительно от 400 МГц, в частности 500 МГц, и до 1 ГГц, как указывалось выше). В остальном, объяснения со ссылкой на первый вариант осуществления применимы также и для второго варианта осуществления настоящего изобретения.
Активный маркер 10 позиции может быть приспособлен к медицинскому устройству, в частности, в виде интервенционного или неинтервенционного инструмента (не показано) на участке этого инструмента, который является интересующей частью для отображения, например его наконечнике, который должен направляться в определенную нужную целевую область на обследуемом объекте или внутри него.
В случае использования активного маркера 10 позиции в качестве автономного модуля, он может также помещаться, например, на обследуемый объект с целью обнаружения (и корректирования с помощью модуля обработки изображений) любого нежелательного перемещения обследуемого объекта.
Дополнительно, активный маркер 10 позиции может использоваться, например, для биопсии с МР-управлением (например, для определения плоскости сканирования, если он расположен в иглодержателе) или для отслеживания интервенционных устройств или ВЧ передающих/приемных катушек в форме поверхностных катушек, и для многих других целей.
Несмотря на то, что настоящее изобретение было проиллюстрировано и подробно описано на чертежах и в вышеприведенном описании, такие иллюстрация и описание должны рассматриваться как пояснительные или иллюстративные, а не ограничительные; настоящее изобретение не ограничивается раскрытыми вариантами осуществления.
Изменения в отношении раскрытых вариантов осуществления могут быть поняты и произведены специалистами в данной области техники при практическом использовании заявленного изобретения, на основании изучения чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения, слово "содержащий" не исключает другие элементы или этапы, и использование единственного числа не исключает множественности. Единственный модуль может выполнять функции нескольких структурных элементов, перечисленных в формуле изобретения. Сам по себе тот факт, что некоторые средства перечислены во взаимно различных зависимых пунктах формулы изобретения, не означает, что сочетание этих средств не может использоваться с выгодой. Никакие ссылочные позиции в формуле изобретения не должны рассматриваться как ограничивающие объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ МАГНИТНО-РЕЗОНАНСНОЙ КАТУШКИ ДЛЯ ФИДУЦИАЛЬНЫХ МАРКЕРОВ | 2014 |
|
RU2665343C1 |
| РЧ ПЕРЕДАЮЩАЯ И/ИЛИ ПРИМИНАЮЩАЯ АНТЕННА ДЛЯ ГИБРИДНОЙ СИСТЕМЫ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ/ ВЫСОКОИНТЕНСИВНОГО СФОКУСИРОВАННОГО УЛЬТРАЗВУКА | 2011 |
|
RU2541374C2 |
| БЕСПРОВОДНОЙ МАРКЕР ПЕРСПЕКТИВНОГО ДВИЖЕНИЯ | 2012 |
|
RU2604702C2 |
| ИНТЕРВЕНЦИОННАЯ МР-ТОМОГРАФИЯ С КОМПЕНСАЦИЕЙ ДВИЖЕНИЯ | 2010 |
|
RU2580189C2 |
| РАДИОЧАСТОТНЫЙ МОДУЛЬ ПЕРЕДАЧИ С БЛОКОМ МОНИТОРИНГА ЛОКАЛЬНОГО ПОЛЯ ДЛЯ СИСТЕМЫ МАГНИТНО-РЕЗОНАНСНОГО ОБСЛЕДОВАНИЯ | 2016 |
|
RU2713807C2 |
| ОПОРА СУБЪЕКТА ДЛЯ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2014 |
|
RU2655010C2 |
| СПЕЦИАЛИЗИРОВАННЫЙ ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС ДЛЯ ИНТЕРСТИЦИАЛЬНЫХ ВМЕШАТЕЛЬСТВ С МАГНИТНО-РЕЗОНАНСНЫМ НАВЕДЕНИЕМ | 2013 |
|
RU2641374C2 |
| МАГНИТНО-РЕЗОНАНСНОЕ УСТРОЙСТВО И СПОСОБ | 2006 |
|
RU2411528C2 |
| СПОСОБ МОБИЛЬНОГО ПОИСКА МЕСТОРОЖДЕНИЙ УГЛЕВОДОРОДОВ И ДОННЫХ ОБЪЕКТОВ, ОБНАРУЖЕНИЯ ПРИЗНАКОВ ЗАРОЖДЕНИЯ ОПАСНЫХ ЯВЛЕНИЙ НА МОРСКОМ ШЕЛЬФЕ | 2015 |
|
RU2601773C2 |
| УСТРОЙСТВО И СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ МЕТОДОМ МАГНИТНОГО РЕЗОНАНСА | 2008 |
|
RU2491567C2 |
Изобретение относится к системе активных маркеров позиции для использования в устройстве магнитно-резонансной томографии. Активный маркер позиции содержит локальную ВЧ приемную катушку для приема локальных МР-сигналов (fs), которые возбуждаются в локальном объеме, который окружает локальную ВЧ приемную катушку и/или охвачен ею, при этом содержит параметрический усилитель, предусмотренный в активном маркере позиции, для усиления принимаемого локального МР-сигнала и для повышающего преобразования его частоты посредством сигнала (fp) частоты накачки, по меньшей мере, в один сигнал частоты верхней боковой полосы и/или, по меньшей мере, в один сигнал частоты нижней боковой полосы (fp+fs, fp-fs), и по меньшей мере, одну антенну, предусмотренную в активном маркере позиции, для беспроводной передачи, или кабельный интерфейс для проводной передачи, по меньшей мере, одного сигнала частоты верхней боковой полосы и/или, по меньшей мере, одного сигнала частоты нижней боковой полосы (fp+fs, fp-fs), преобразованного с повышением частоты локального МР-сигнала. Технический результат – повышение точности позиционирования медицинского инструмента. 3 н. и 8 з.п. ф-лы, 2 ил.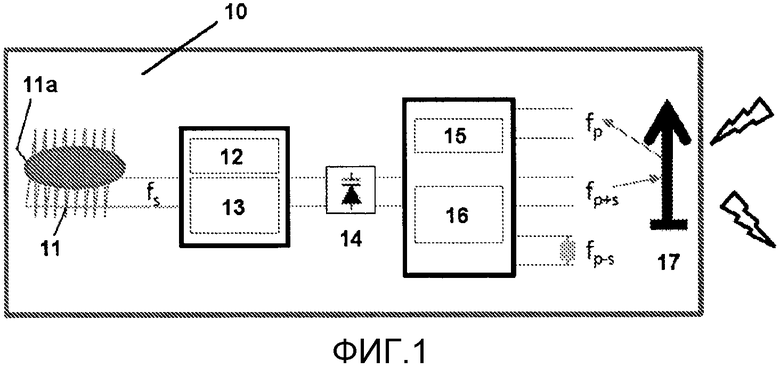
1. Активный маркер (10) позиции, содержащий:
локальную ВЧ приемную катушку (11) для приема локальных МР-сигналов (fs), которые возбуждаются в локальном объеме, который окружает локальную ВЧ приемную катушку (11) и/или охвачен ею, отличающийся тем, что содержит:
параметрический усилитель (14), предусмотренный в активном маркере позиции, для усиления принимаемого локального МР-сигнала и для повышающего преобразования его частоты посредством сигнала (fp) частоты накачки, по меньшей мере, в один сигнал частоты верхней боковой полосы и/или, по меньшей мере, в один сигнал частоты нижней боковой полосы (fp+fs, fp-fs), и
по меньшей мере, одну антенну (17), предусмотренную в активном маркере позиции, для беспроводной передачи, или кабельный интерфейс для проводной передачи, по меньшей мере, одного сигнала частоты верхней боковой полосы и/или, по меньшей мере, одного сигнала частоты нижней боковой полосы (fp+fs, fp-fs), преобразованного с повышением частоты локального МР-сигнала.
2. Активный маркер позиции по п. 1, в котором локальный объем (11a) активного маркера (10) позиции содержит маркирующее вещество.
3. Активный маркер позиции по п. 1, в котором между локальной ВЧ приемной катушкой (11) и параметрическим усилителем (14) подсоединен первый фильтр (12) для полосовой фильтрации принимаемого локального МР-сигнала.
4. Активный маркер позиции по п. 1, в котором между локальной ВЧ приемной катушкой (11) и параметрическим усилителем (14) подсоединена первая согласующая цепь (13) для согласования полного сопротивления усилителя (14) с полным сопротивлением локальной ВЧ приемной катушки (11).
5. Активный маркер позиции по п. 1, в котором между параметрическим усилителем (14) и, по меньшей мере, одной первой антенной (17) или кабелем подсоединен, соответственно, по меньшей мере, один второй фильтр (15) для полосовой фильтрации, по меньшей мере, одного сигнала боковой полосы, преобразованного с повышением частоты МР-сигнала.
6. Активный маркер позиции по п. 1, в котором между параметрическим усилителем (14) и, по меньшей мере, одной первой антенной (17) или кабелем подсоединена, соответственно, по меньшей мере, одна вторая согласующая цепь (16) для согласования полного сопротивления усилителя (14), по меньшей мере, с одной первой антенной (17) или кабелем, соответственно.
7. Медицинское устройство в форме интервенционного или неинтервенционного инструмента для использования во время генерирования МР-изображения, содержащее активный маркер (10) позиции, по меньшей мере, по одному из пп. 1-6.
8. Медицинское устройство по п. 7 в форме кардиостимулятора, катетера, хирургического устройства, иглы для биопсии, стрелочного прибора, ВЧ передающей и/или приемной поверхностной катушки, гибкой ВЧ катушки, головной ВЧ катушки или стереотаксической рамки.
9. Система активных маркеров позиции, содержащая, по меньшей мере, один активный маркер (10) позиции, по меньшей мере, по одному из пп. 1-6, и удаленный приемо-передающий модуль (20).
10. Система активных маркеров позиции по п. 9, содержащая множество активных маркеров (10) позиции, каждый из которых управляется с помощью одного из множества сигналов (fp) накачки, каждый из которых имеет одну из различных частот накачки, и/или которые передают один из множества сигналов частоты верхней и/или нижней боковой полосы, каждый из которых имеет одну из различных частот верхней и/или нижней боковой полосы, при этом приемо-передающий модуль (20) содержит справочную таблицу для назначения каждому активному маркеру (10) позиции уникальной идентификации на основе частоты принимаемого преобразованного с повышением частоты МР-сигнала, причем эта идентификация подается вместе с преобразованным с понижением МР-сигналом на модуль (30) обработки изображений системы МР-томографии.
11. Активный маркер позиции по п. 1, в котором локальная ВЧ приемная катушка охватывает локальный объем или окружена им.
| US 2003227289 A1, 11.12.2003 | |||
| US 2002156365 A1, 24.10.2002 | |||
| US 2010117650 A1, 13.05.2010 | |||
| УСОВЕРШЕНСТВОВАНИЯ, ОТНОСЯЩИЕСЯ К МАГНИТНЫМ ЯРЛЫКАМ ИЛИ МАРКЕРАМ | 1996 |
|
RU2183033C2 |

