Предлагаемая группа изобретений относится к способу и системам управления ракетами, позволяющим снизить энергопотребление системы управления рулевого привода (РП), и может быть использована в контуре управления РП управляемой ракеты с широтно-импульсным методом регулирования, являющегося основным потребителем электрической энергии, необходимой для функционирования управляющего электромагнита (УЭМ).
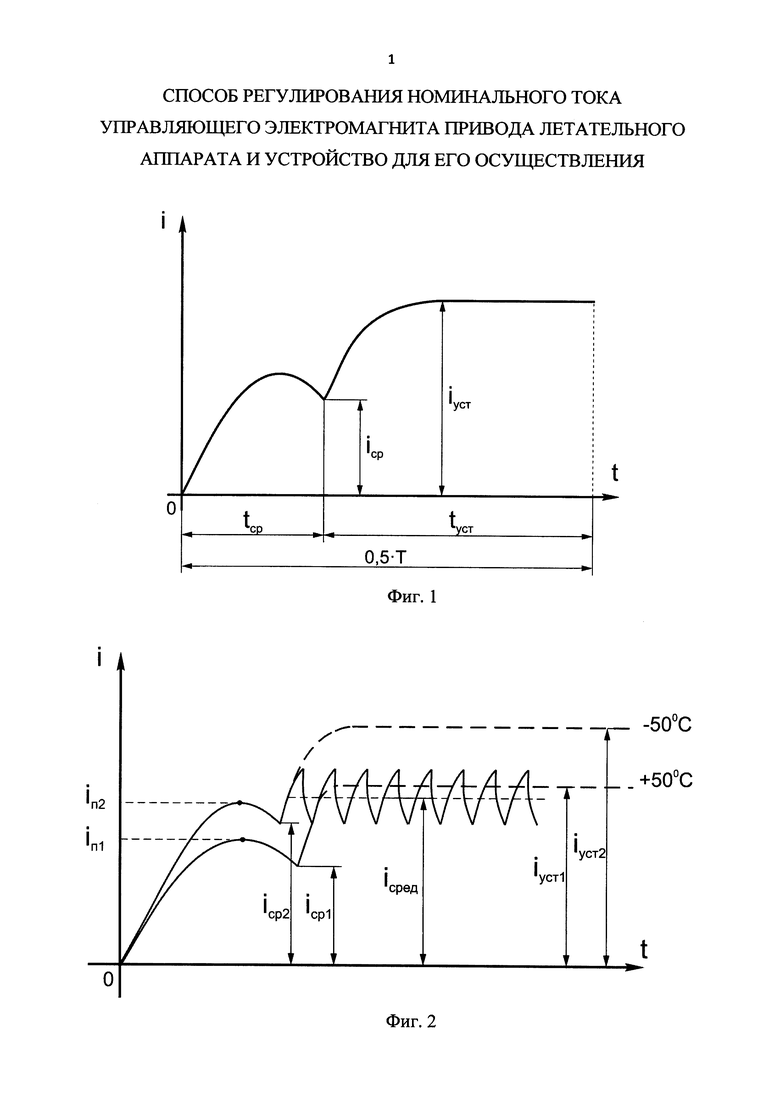
Рассмотрим график переходного процесса по току при срабатывании УЭМ, который включает 2 участка (Фиг. 1). Участок, который соответствует времени срабатывания tcp УЭМ, и участок после срабатывания tуст, когда ток в возбужденной обмотке увеличивается и устанавливается постоянным, величина которого существенно превышает ток, необходимый для удержания якоря на упоре icp.
При этом длительность тока iyст, зависящая от длительности периода Т широтно-импульсного модулированного сигнала управления (ШИМ-сигнала управления), величина которого выбирается из условия отработки РП линеаризующего сигнала, как правило, превышает время tcp.
С целью снижения величины потребления тока, что является важным фактором при проектировании летательных аппаратов, применяются разные способы снижения тока после срабатывания УЭМ.
Так, общеизвестен способ снижения потребления тока, при котором в цепь возбужденной обмотки после срабатывания включают балластный резистор значительной мощности, увеличивающий общее омическое сопротивление. При этом увеличиваются габариты аппаратуры управления, что не всегда приемлемо. Кроме того, так как установившийся ток при минус 50°C на 43% больше, чем при 50°C (из-за температурного изменения сопротивления обмотки с медным проводом), величины балластных сопротивлений должны быть разные. При этом в случае применения одного балластного сопротивления для обеспечения работоспособности УЭМ величина его выбирается для положительной температуры, которая будет меньше необходимой его величины при минус 50°C на 43%, что увеличивает потребление тока при отрицательных температурах. Указанный способ рассмотрен авторами в качестве аналога.
В качестве прототипа авторами принят способ регулирования номинального тока нагрузки и устройство для его осуществления по патенту РФ №2235352 от 27.08.2004 г. [1], позволяющий снизить энергопотребление системой управления, согласно которому широтно-импульсный модулированный сигнал управления подвергают дополнительной широтно-импульсной модуляции, при этом измеряют величину тока нагрузки, сравнивают ее с величиной заданных порогов включения и выключения нагрузки и по результатам сравнения устанавливают величину коэффициента дополнительной широтно-импульсной модуляции, которым задают номинальный ток нагрузки.
Устройство регулирования номинального тока нагрузки, реализующее способ, содержит источник питания, формирователь ШИМ-сигнала управления, последовательно включенные нагрузку и электронный ключ, последовательно соединенные датчик тока, двухпороговое устройство сравнения с задатчиком порогов включения и выключения нагрузки и схему совпадения, второй вход которой подключен к выходу формирователя ШИМ, выход схемы совпадения соединен с управляющим входом электронного ключа, при этом первый вход датчика соединен с источником питания, второй вход - со вторым выводом нагрузки.
Данный способ и устройство обладают следующим недостатком.
При разработке новых летательных аппаратов, в которых необходимо применить РП с повышенным быстродействием, возникает потребность повышения быстродействия и управляющего электромагнита за счет увеличения его мощности при снижении энергопотребления. В известном способе и устройстве повышение мощности УЭМ влечет за собой повышение и его номинального тока, что является нежелательным (а иногда и невыполнимым) ввиду ограничения мощности бортового источника питания.
Условия эксплуатации ракет предполагают использование их в диапазоне температур от минус 50°C до 50°C. При этом, как указывалось выше, при минус 50°C происходит увеличение тока на 43% по сравнению с температурой 50°C. Это означает, что в прототипе пороги включения и выключения дополнительной ШИМ должны быть разными для температур минус 50°C и 50°C, что усложняет устройство и увеличивает его габариты. При использовании указанных порогов только для положительной температуры при отрицательной температуре в возбужденной обмотке ток не будет доходить до величины iп2 (Фиг. 2). Это ведет к отказу работы УЭМ, так как ток в возбужденной обмотке начинает падать до прихода якоря на упор. Поэтому приходится устанавливать пороги включения и выключения дополнительной ШИМ только для отрицательной температуры. При таком ограничении тока, выбранном для отрицательной температуры, номинальный ток будет больше требуемого, и в некоторых случаях возможно отсутствие включения дополнительной ШИМ при 50°C (пороги включения и выключения, имеющие место при минус 50°C, могут быть больше iyст при положительной температуре).
По этой причине указанный порог включения тока надо выбирать при максимальной отрицательной температуре, что приводит к увеличению тока при положительных температурах. К тому же в устройстве для осуществления данного способа необходимо размещать дополнительно датчик тока в виде резистора, с которого снимается напряжение, подаваемое в аппаратуру.
При этом величина среднего тока iсред (Фиг. 2) всегда больше тока срабатывания при обеих температурах icp1 и icp2, что позволяет якорю удерживаться на упоре.
Задачей предлагаемой группы изобретений является снижение номинального тока УЭМ рулевого привода летательного аппарата при увеличении мощности УЭМ с целью повышения его быстродействия.
Поставленная задача решается за счет того, что в способе регулирования номинального тока УЭМ привода летательного аппарата, при котором ШИМ-сигнал управления подвергают дополнительной модуляции, после срабатывания УЭМ в соответствии с указанным сигналом управления через время t0 формируют сигнал на отключение тока в возбужденной обмотке УЭМ длительностью Тотк, по истечении времени Тотк формируют сигнал на включение тока в указанной обмотке длительностью Твкл, при этом цикл сигналов длительностью Тотк и Твкл повторяют до момента отключения обмотки в соответствии с сигналом управления, длительность t0, Тотк и Твкл подбирают таким образом, чтобы номинальный ток был больше тока срабатывания icp.
Предложенный способ реализуется устройством регулирования номинального тока, содержащим источник питания, формирователь ШИМ-сигнала управления, выход которого подключен к первому входу схемы совпадения, последовательно соединенные нагрузку в виде обмотки УЭМ и электронный ключ, управляющий вход (база транзистора) которого подключен к выходу схемы совпадения, а эмиттерный вывод - к одному из выводов источника питания. Согласно изобретению в устройство введены генератор тактовых импульсов и регулятор тока, состоящий из счетчика, выходы D3, D4, D15 которого подключены соответственно ко входам элемента «ИЛИ», выход которого подключен ко второму входу схемы совпадения, и двух последовательно включенных D-триггеров, выходы «О» которых через элемент «исключающее ИЛИ» подключены к «RST» входу счетчика, а входы «С» D-триггеров и счетчика подключены к генератору тактовых импульсов, причем «D» вход первого D-триггера подключен к выходу формирователя ШИМ-сигнала управления, а второй вывод обмотки УЭМ подключен к другому выводу источника питания.
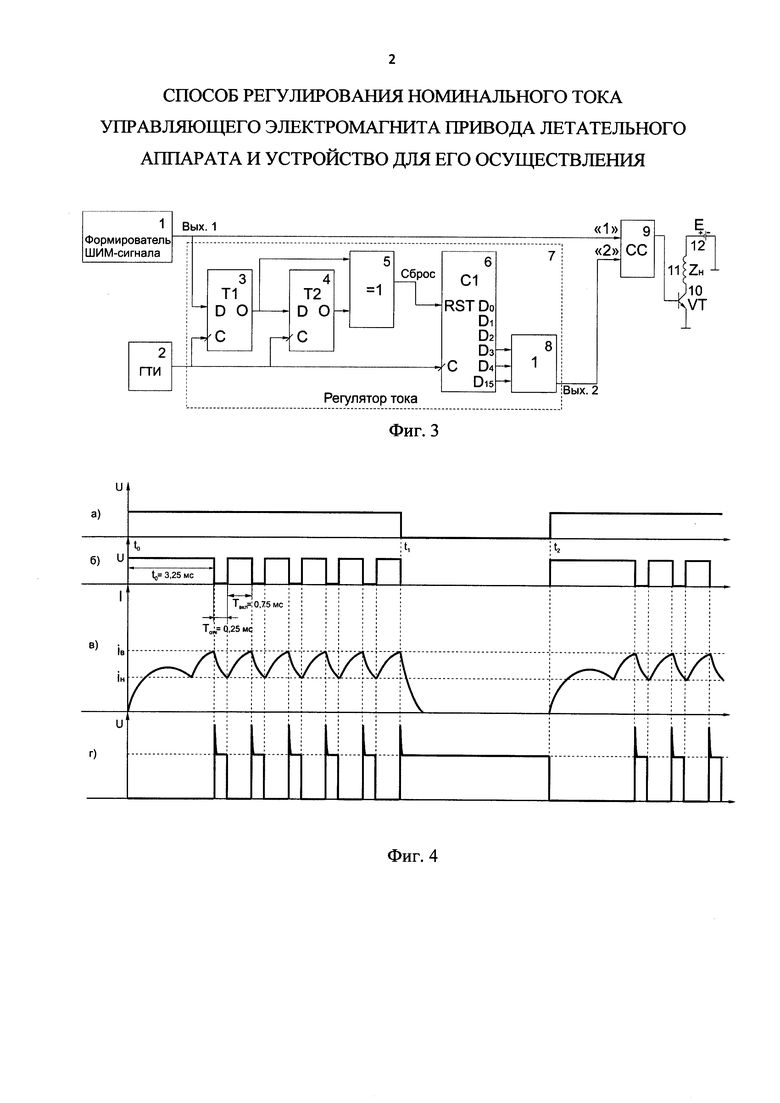
Предлагаемое изобретение поясняется чертежами, представленными на фиг. 3 и фиг. 4. На фиг. 3 приведена структурная схема устройства регулирования номинального тока управляющего электромагнита привода летательного аппарата, где:
1 - формирователь широтно-импульсного модулированного сигнала управления;
2 - генератор тактовых импульсов (ГТИ);
3 - первый D-триггер;
4 - второй D-триггер;
5 - элемент «исключающее ИЛИ»;
6 - счетчик;
7 - регулятор тока;
8 - элемент «ИЛИ»;
9 - схема совпадения;
10 - VT-транзистор (электронный ключ);
11 - Zн - обмотка управляющего электромагнита (активно-индуктивная нагрузка);
12 - Е - источник питания (батарея).
На фиг. 4 приведены эпюры сигналов, где:
а - напряжение на выходе формирователя ШИМ-сигнала управления 1;
б - сигнал с выхода регулятора тока 7;
в - ток нагрузки Zн 11;
г - напряжение коллектор-эмиттер транзистора VT 10.
Устройство регулирования номинального тока управляющего электромагнита привода летательного аппарата работает следующим образом. Формирователь ШИМ-сигнала управления 1 преобразует сигнал управления из аналогового или цифрового вида в ШИМ. При наличии на входах схемы совпадения 9 единичных логических уровней с выхода регулятора тока 7 (эпюра «б» на фиг. 4) и формирователя ШИМ-сигнала управления (эпюра «а» на фиг. 4) на выходе схемы совпадения 9 формируется высокий уровень напряжения, который обеспечит подключение транзистором VT 10 нагрузки Zн 11 к источнику питания Е 12. Через активно-индуктивную нагрузку Zн в течение времени t0, превышающего время срабатывания управляющего электромагнита привода летательного аппарата, начнет протекать ток (эпюра «в» на фиг. 4). Через время t0 (в данном случае 3,25 мс) при достижении тока верхнего значения iв формируется нулевой логический уровень на время Тотк (в данном случае 0,25 мс) (эпюра «б» на фиг. 4), который запретит прохождение единичного логического уровня сигнала с выхода формирователя ШИМ-сигнала (эпюра «а» на фиг. 4), при этом транзистор отключит нагрузку Zн от источника питания Е. Ток, протекающий через нагрузку Zн, начнет уменьшаться в течение Тотк до нижнего значения iн. Далее в течение времени Твкл (в данном случае 0,75 мс) формируется единичный логический уровень с выхода регулятора тока 7 (эпюра «б» на фиг. 4), при котором ток через нагрузку Zн вновь будет расти до значения iв и т.д. до появления следующего нулевого логического уровня с выхода регулятора тока 7.
Как следует из фиг. 4, эпюра «б» представляет собой дополнительный широтно-импульсный модулированный сигнал ШИМ-сигнала управления, изображенного на эпюре «а».
На эпюре «г» фиг. 4 изображено напряжение к-э перехода транзистора VT с выбросами, обусловленными ЭДС самоиндукции в нагрузке Zн. Нагрузка Zн может шунтироваться цепочкой из последовательно включенных диода и стабилитрона, описанной в патенте 2235352 от 27.08.2004 г [1].
Устройство регулирования номинального тока нагрузки может выполнено и иначе, например для двух идентичных активно-индуктивных нагрузок, поочередно подключаемых к источнику питания в течение времени t0-t1 и t1-t2 соответственно. При этом эпюры сигналов, приведенные на фиг. 4 для первой нагрузки, сохранятся, а для второй (с момента подключения нагрузки) они сдвинуты и будут иметь место в течение времени t1-t2, т.к. вторая нагрузка работает в противофазе к первой по сигналу управления (эпюра «а» на фиг. 4).
Регулятор тока работает следующим образом.
При помощи D-триггеров 3 и 4 формируется сигнал «Сброс» (по каждому положительному и отрицательному фронту сигнала «Вых. 1». По сигналу «Сброс» счетчик 6 устанавливается в состояние FF98 (в шестнадцатеричной системе) и продолжает счет по тактовым импульсам, поступающим с генератора тактовых импульсов 2. Тактовые импульсы одновременно поступают на входы С D-триггеров 3 и 4 и счетчика 6. При возникновении на выходе счетчика 6 комбинаций D15=0, D4=0, D3=0 формируется сигнал с выхода регулятора тока с активным уровнем «Вых. 2». Период формирования сигнала регулятора тока составляет 1 мс и определяется состоянием D4=0. Состояние D15=1, которое устанавливается по сигналу «Сброс», блокирует формирование импульсов сигнала «Врезка» на время 3,25 мс после фронта сигнала «Вых. 2».
Реализация предложенного способа может быть выполнена с использованием цифровой схемотехники или на программно-алгоритмическом уровне с использованием микропроцессоров или программируемых логических интегральных схем.
Источники информации
1. Патент РФ №2235352 от 27.08.2004 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ НОМИНАЛЬНОГО ТОКА НАГРУЗКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2235352C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВРЕМЕНИ СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773298C1 |
| Преобразователь перемещения в код | 1988 |
|
SU1654973A1 |
| МНОГОКАНАЛЬНЫЙ УСИЛИТЕЛЬ КЛАССА D | 2014 |
|
RU2574813C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, РАКЕТА, ВРАЩАЮЩАЯСЯ ПО УГЛУ КРЕНА, СПОСОБ ФОРМИРОВАНИЯ ДВУХСКАТНОГО ЛИНЕАРИЗИРОВАННОГО СИГНАЛА И ПЕРЕКЛЮЧАЕМЫЙ ЛИНЕАРИЗАТОР СИГНАЛА | 2005 |
|
RU2283466C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2194946C2 |
| ПРОТИВОУГОННАЯ СИСТЕМА | 1995 |
|
RU2086437C1 |
| Стабилизированный источник питания | 1986 |
|
SU1390736A1 |
| Ключевой стабилизатор постоянного напряжения | 1990 |
|
SU1728854A1 |
| Стабилизированный преобразователь постоянного напряжения | 1981 |
|
SU1001366A1 |
Группа изобретений относится к области систем управления летательными аппаратами и может быть использована в контуре управления рулевого привода ракет с широтно-импульсным методом регулирования. Задачей группы изобретений является снижение энергопотребления рулевым приводом при увеличении мощности управляющего электромагнита (УЭМ) с целью повышения его быстродействия. В предлагаемом способе регулирования номинального тока управляющего электромагнита (УЭМ) широтно-импульсный модулированный сигнал (ШИМ-сигнал) управления подвергают дополнительной модуляции, при которой после срабатывания УЭМ в соответствии с указанным сигналом управления через время t0 формируют сигнал на отключение тока в возбужденной обмотке УЭМ длительностью Тотк, по истечении которого формируют сигнал на включение тока в указанной обмотке длительностью Твкл. Цикл сигналов длительностью Тотк и Твкл повторяют до момента отключения обмотки в соответствии с сигналом управления. При этом длительность t0, Тотк и Твкл подбирают таким образом, чтобы номинальный ток был больше тока срабатывания в момент прихода якоря УЭМ на упор. Устройство для осуществления указанного способа содержит источник питания, формирователь ШИМ-сигнала управления, выход которого подключен к первому входу схемы совпадения, последовательно соединенные нагрузку в виде обмотки УЭМ и электронный ключ, управляющий вход (база транзистора) которого подключен к выходу схемы совпадения, а эмиттерный вывод - к одному из выводов источника питания. В устройство введены генератор тактовых импульсов и регулятор тока, состоящий из счетчика, выходы D3, D4, D15 которого подключены соответственно ко входам элемента ИЛИ, выход которого подключен ко второму входу схемы совпадения, и двух последовательно включенных D-триггеров, выходы «О» которых через элемент ИСКЛЮЧАЮЩЕЕ ИЛИ подключены к «RST» входу счетчика, а входы «С» D-триггеров и счетчика подключены к генератору тактовых импульсов, причем «D» вход первого D-триггера подключен к выходу формирователя ШИМ-сигнала управления, а второй вывод обмотки УЭМ подключен к другому выводу источника питания. 2 н.п. ф-лы, 4 ил.
1. Способ регулирования номинального тока управляющего электромагнита (УЭМ) привода летательного аппарата, при котором широтно-импульсный модулированный (ШИМ) сигнал управления подвергают дополнительной модуляции, отличающийся тем, что после срабатывания УЭМ в соответствии с ШИМ-сигналом управления через время t0 формируют сигнал на отключение тока в возбужденной обмотке УЭМ длительностью Тотк, по истечении времени Тотк формируют сигнал на включение тока в указанной обмотке длительностью Твкл, при этом цикл сигналов длительностью Тотк и Твкл повторяют до момента отключения обмотки в соответствии с сигналом управления, длительность t0, Тотк и Твкл подбирают таким образом, чтобы номинальный ток был больше тока срабатывания icp.
2. Устройство регулирования номинального тока для осуществления способа по п. 1, содержащее источник питания, формирователь ШИМ-сигнала управления, выход которого подключен к первому входу схемы совпадения, последовательно соединенные нагрузку в виде обмотки УЭМ и электронный ключ, управляющий вход (база транзистора) которого подключен к выходу схемы совпадения, а эмиттерный вывод - к одному из выводов источника питания, отличающееся тем, что в устройство введены генератор тактовых импульсов и регулятор тока, состоящий из счетчика, выходы D3, D4, D15 которого подключены соответственно ко входам элемента «ИЛИ», выход которого подключен ко второму входу схемы совпадения, и двух последовательно включенных D-триггеров, выходы «О» которых через элемент «исключающее ИЛИ» подключены к «RST» входу счетчика, а входы «С» D-триггеров и счетчика подключены к генератору тактовых импульсов, причем «D» вход первого D-триггера подключен к выходу формирователя ШИМ-сигнала управления, а второй вывод обмотки УЭМ подключен к другому выводу источника питания.
| СПОСОБ РЕГУЛИРОВАНИЯ НОМИНАЛЬНОГО ТОКА НАГРУЗКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2235352C2 |
| СПОСОБ СИНХРОНИЗИРОВАННОГО УПРАВЛЕНИЯ ШИРОТНО- ИМПУЛЬСНЫМ РЕГУЛЯТОРОМ | 0 |
|
SU395826A1 |
| Устройство для управления электромагнитами | 1980 |
|
SU943905A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ (ВАРИАНТЫ) | 1997 |
|
RU2143761C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЭЛЕКТРОПИТАНИЕМ БОРТОВОЙ АППАРАТУРЫ УПРАВЛЯЕМОЙ РАКЕТЫ И УПРАВЛЯЕМАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2233420C2 |
| US 3443774 A1, 13.05.1969. | |||

