ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к устройству управления для транспортного средства. В частности, изобретение относится к устройству управления, применимому на транспортном средстве, обеспечивающему движение по инерции, при котором выключен блок соединения и разъединения, расположенный в контуре передачи мощности между источником приводного усилия и ведущими колесами.
2. Описание предшествующего уровня техники
[0002] В известном уровне техники, автоматическое сцепление, которое автоматически входит в зацепление и разъединяется приводом сцепления, известно в качестве устройства сцепления, размещенного в контуре передачи мощности между двигателем и ручным устройством переключения, как описано в публикации японской нерассмотренной патентной заявки No. 2012-30707 (JP 2012-30707 А).
[0003] В JP 2012-30707 А, описано выполнение движения по инерции путем выключения автоматического сцепления, когда устанавливается условие начала движения по инерции во время движения транспортного средства, оснащенного автоматическим сцеплением. Такое состояние движения обычно называют движением накатом. Движение накатом не создает тормозной энергии, вызываемой сопротивлением двигателя (так называемого торможения двигателем), и, тем самым может увеличить дистанцию движения по инерции и повысить топливный КПД двигателя.
[0004] Известно также транспортное средство, которое обеспечивает водителю ручной выбор одного из множества режимов движения, имеющих различные уровни ходовых характеристик (ходовые характеристики по дороге с неровным покрытием, ходовые характеристики устойчивости, или характеристики реакции по отношению к управлению водителем). Например, в публикации японской нерассмотренной патентной заявки No. 2016-153274 (JP 2016-153274 А), раскрыто транспортное средство, включающее в себя исполнительный механизм для переключения режима либо с режимом привода на два колеса для выполнения движения с приводом на два колеса, либо с режимом привода на четыре колеса, для выполнения движения с приводом на четыре колеса. В этом транспортном средстве режим привода на два колеса или режим привода на четыре колеса можно выбрать, вручную управляя исполнительным механизмом для переключения режима.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Во время выполнения движения накатом, мощность от двигателя не передается на колеса. Таким образом, даже когда водитель, запрашивающий высокие ходовые характеристики (высокие ходовые характеристики по дороге с неровным покрытием, высокие ходовые характеристики устойчивости, или высокие характеристики реакции по отношению к управлению водителя) выбирает режим движения, запрос может быть не удовлетворен. Например, даже когда выбран режим привода на четыре колеса в транспортном средстве, обеспечивающем ручной выбор водителем либо режима привода на два колеса, либо режима привода на четыре колеса, как описано выше, то есть, даже когда водитель запрашивает высокие ходовые характеристики по дороге с неровным покрытием, запрос может быть не удовлетворен при движении накатом. То есть, ходовые качества снижаются из-за выполнения движения накатом.
[0006] Изобретением предложено устройство управления для транспортного средства, которое обеспечивает движение накатом (движение по инерции), при этом устройство управления обеспечивает получение предпочтительных ходовых качеств.
[0007] Объект изобретения относится к устройству управления для транспортного средства. Транспортное средство содержит блок соединения и разъединения, который размещен в контуре передачи мощности между источником приводного усилия и ведущими колесами. Блок соединения и разъединения выполнен с возможностью переключения между состоянием включения и состоянием выключения посредством воздействия приводов. Передача мощности в контуре передачи мощности выполняется в состоянии включения. Передача мощности в контуре передачи мощности блокируется в состоянии выключения. Транспортное средство включает в себя исполнительный механизм для переключения режима, который управляется водителем. Исполнительный механизм для переключения режима выполнен с возможностью выбора одного режима движения из множества режимов движения, включающих в себя первый режим и второй режим, имеющих различные уровни ходовых характеристик. Устройство управления содержит: электронный блок управления, который выполнен с возможностью управления приводами по выполнению движения по инерции, при котором блок соединения и разъединения переводится в состояние выключения, когда устанавливается заданное условие начала движения по инерции, и осуществления, по меньшей мере, либо управления завершением движения по инерции, либо управления не выполнением движения по инерции, при этом управление завершением движения по инерции завершает движение по инерции, когда исполнительный механизм для переключения режима используется для выбора первого режима, имеющего более высокие ходовые характеристики, чем второй режим во время движения по инерции, выполняемого путем установки условия начала движения по инерции, а управление не выполнением движения по инерции не выполняет движение по инерции, когда условие начала движения по инерции устанавливается после того, как исполительный механизм для переключения режима изменяет режим движения на первый режим.
[0008] Более конкретно, блок предотвращения движения по инерции выполняет, по меньшей мере, либо управление завершением движения по инерции, либо управление не выполнением движения по инерции, при этом управление завершением движения по инерции завершает движение по инерции, когда исполнительный механизм для переключения режима используется для выбора первого режима во время движения по инерции, выполняемого путем установки условия начала движения по инерции, а управление не выполнением движения по инерции не выполняет движение по инерции, когда условие начала движения по инерции устанавливается после того, как исполнительный механизм для переключения режима изменяет режим движения на первый режим. Таким образом, предотвращается движение по инерции во время движения в первом режиме, и водитель может получить запрошенные высокие ходовые характеристики (высокие ходовые характеристики по дороге с неровным покрытием, высокие ходовые характеристики устойчивости, либо высокие характеристики реакции по отношению к управлению водителя) и получить более предпочтительные ходовые качества, чем в известном уровне техники (выполнение движения по инерции путем установки условия начала движения по инерции даже в режиме движения, имеющем высокие ходовые характеристики).
[0009] Согласно данному объекту изобретения, транспортное средство может включать в себя механизм переключения ведущих колес, размещенный в контуре передачи мощности. Механизм переключения ведущих колес выполнен с возможностью переключения между движением с приводом на четыре колеса и движением с приводом на два колеса. Режимы движения могут включать в себя режим привода на четыре колеса, обеспечивающий движение с приводом на четыре колеса, и режим привода на два колеса, обеспечивающий движение с приводом на два колеса. Первый режим может представлять собой режим привода на четыре колеса, а второй режим может представлять собой режим привода на два колеса.
[0010] Режим привода на четыре колеса имеет более высокие ходовые характеристики по дороге с неровным покрытием в качестве ходовых характеристик, чем режим привода на два колеса. Когда водитель, запрашивающий высокие ходовые характеристики по дороге с неровным покрытием, выбирает режим привода на четыре колеса посредством воздействия исполнительного механизма для переключения режима во время движения по инерции, выполняемого путем установки условия начала движения по инерции, движение по инерции заканчивается (управление окончанием движения по инерции). Когда водитель, запрашивающий высокие ходовые характеристики по дороге с неровным покрытием, выбирает режим привода на четыре колеса посредством воздействия исполнительного механизма для переключения режима, движение по инерции не выполняется даже с установкой условия начала движения по инерции (управление не выполнением движения по инерции). Таким образом, предотвращается движение по инерции во время движения в режиме привода на четыре колеса, и можно обеспечить высокие ходовые характеристики по дороге с неровным покрытием, запрошенные водителем. Как следствие, можно обеспечить предпочтительные ходовые качества.
[0011] Согласно данному объекту изобретения, транспортное средство может содержать вспомогательный механизм переключения, размещенный в контуре передачи мощности транспортного средства. Вспомогательный механизм переключения выполнен с возможностью переключения на две ступени - низкоскоростную ступень и высокоскоростную ступень, с тем, чтобы изменять передаточное отношение вращения, передаваемого от источника приводного усилия на ведущие колеса. Режимы движения могут включать в себя низкоскоростной режим, переводящий вспомогательный механизм переключения на низкоскоростную ступень, и высокоскоростной режим, переводящий вспомогательный механизм переключения на высокоскоростную ступень. Первый режим может представлять собой низкоскоростной режим, а второй режим может представлять собой высокоскоростной режим.
[0012] Низкоскоростной режим вспомогательного механизма переключения имеет более высокие ходовые характеристики по дороге с неровным покрытием в качестве ходовых характеристик, чем высокоскоростной режим. Когда водитель, запрашивающий высокие ходовые характеристики по дороге с неровным покрытием, выбирает низкоскоростной режим посредством воздействия исполнительного механизма для переключения режима во время движения по инерции, выполняемого путем установки условия начала движения по инерции, движение по инерции завершается (управление завершением движения по инерции). Когда водитель, запрашивающий высокие ходовые характеристики по дороге с неровным покрытием, выбирает низкоскоростной режим посредством воздействия исполнительного механизма для переключения режима, движение по инерции не выполняется даже с установкой условия начала движения по инерции (управление не выполнением движения по инерции). Таким образом, предотвращается движение по инерции во время движения в низкоскоростном режиме, и можно обеспечить высокие ходовые характеристики по дороге с неровным покрытием запрошенные водителем. Как следствие, можно получить предпочтительные ходовые качества.
[0013] Согласно данному объекту изобретения, транспортное средство может содержать устройство дифференциала, размещенное в контуре передачи мощности транспортного средства. Устройство дифференциала может содержать механизм блокировки дифференциала. Режимы движения могут включать в себя режим включения (ВКЛ) блокировки дифференциала для блокировки механизма дифференциала устройства дифференциала и режим выключения (ВЫКЛ) блокировки дифференциала для разблокировки механизма блокировки дифференциала устройства дифференциала. Первый режим может представлять собой режим ВКЛ блокировки дифференциала, и второй режим может представлять собой режим ВЫКЛ блокировки дифференциала.
[0014] Режим ВКЛ блокировки дифференциала устройств дифференциала имеет более высокие ходовые характеристики устойчивости в качестве ходовых характеристик, чем режим ВЫКЛ блокировки дифференциала. Когда водитель, запрашивающий высокие ходовые характеристики устойчивости, выбирает режим ВКЛ блокировки дифференциала посредством воздействия исполнительного механизма для переключения режима во время движения по инерции, выполняемого путем установки условия начала движения по инерции, движение по инерции завершается (управление завершением движения по инерции). Когда водитель, запрашивающий высокие ходовые характеристики устойчивости, выбирает режим ВКЛ блокировки дифференциала посредством воздействия исполнительного механизма для переключения режима, движение по инерции не выполняется даже с установкой условия начала движения по инерции (управление не выполнением движения по инерции). Таким образом, предотвращается движение по инерции во время движения в режиме ВКЛ блокировки дифференциала, и можно обеспечить ходовые высокие характеристики устойчивости, запрошенные водителем. Как следствие, можно получить предпочтительные ходовые качества.
[0015] Согласно данному объекту изобретения, режимы движения могут включать в себя, по меньшей мере, режим с повышенной мощностью и экономичный режим, первый режим может представлять собой режим с повышенной мощностью, который определяет приоритетом выходную мощность источника приводного усилия большую, чем экономичный режим, а второй режим может представлять собой экономичный режим, который определяет приоритетом энергоэффективность источника приводного усилия большую, чем режим с повышенной мощностью.
[0016] Режим с повышенной мощностью имеет более высокие характеристики реакции в качестве ходовых характеристик по отношению к управлению водителя, чем экономичный режим. Когда водитель, запрашивающий высокие характеристики реакции выбирает, режим с повышенной мощностью посредством воздействия исполнительного механизма для переключения режима во время движения по инерции, выполняемого путем установки условия начала движения по инерции, движение по инерции завершается (управление завершением движения по инерции). Когда водитель, запрашивающий высокие характеристики реакции, выбирает режим с повышенной мощностью посредством воздействия исполнительного механизма для переключения режима, движение по инерции не выполняется даже с установкой условия начала движения по инерции (управление не выполнением движения по инерции). Таким образом, предотвращается движение по инерции во время движения в режиме с повышенной мощностью, и можно обеспечить запрашиваемые водителем высокие характеристики реакции. Как следствие, можно получить предпочтительные ходовые качества.
[0017] Согласно данному объекту изобретения, источник приводного усилия может представлять собой двигатель внутреннего сгорания. Режимы движения могут включать в себя режим ВКЛ остановки-запуска для остановки двигателя внутреннего сгорания путем остановки транспортного средства, а также режим ВЫКЛ остановки-запуска при отсутствии остановки двигателя внутреннего сгорания, даже при остановке транспортного средства. Первый режим может представлять собой режим ВЫКЛ остановки-запуска, а второй режим может представлять собой режим ВКЛ остановки-запуска.
[0018] Когда водитель выбирает режим ВЫКЛ остановки-запуска посредством воздействия исполнительного механизма для переключения режима, водитель запрашивает транспортное средство продемонстрировать высокие характеристики реакции ускорения. В этом случае, водитель, как считается, запросит высокие характеристики реакции по отношению к управлению во время движения. Таким образом, когда режим ВЫКЛ остановки-запуска выбирают посредством воздействия исполнительного механизма для переключения режима во время движения по инерции, выполняемого путем установки условия начала движения по инерции, движение по инерции завершается (управление завершением движения по инерции). Когда режим ВЫКЛ остановки-запуска выбирают посредством воздействия исполнительного механизма для переключения режима, движение по инерции не выполняется даже с установкой условия начала движения по инерции (управление не выполнением движения по инерции). Соответственно, предотвращается движение по инерции во время движения в режиме ВЫКЛ остановки-запуска, и можно обеспечить запрашиваемые водителем высокие характеристики реакции. Как следствие, можно получить предпочтительные ходовые качества.
[0019] Изобретение предотвращает движение по инерции, когда режим движения, который водитель выбирает посредством воздействия исполнительного механизма для переключения режима, представляет собой режим движения, имеющий высокие ходовые характеристики. Соответственно, водитель может получить запрашиваемые высокие ходовые характеристики и получить предпочтительные ходовые качества.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0020] Признаки, преимущества, а также техническое и промышленное назначение типового варианта осуществления изобретения будут описаны ниже со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции обозначают одинаковые элементы, и на которых:
Фиг. 1 представляет собой схему, иллюстрирующую схематическую конфигурацию силового агрегата и системы управления транспортного средства в первом варианте осуществления;
Фиг. 2 представляет собой структурную схему раздаточной коробки в первом варианте осуществления;
Фиг. 3 представляет собой вид в разрезе, иллюстрирующий заднее устройство дифференциала в первом варианте осуществления;
Фиг. 4 представляет собой блок-схему, иллюстрирующую конфигурацию системы управления, относящейся к каждому электронному блоку управления (ЭБУ) в первом варианте осуществления;
Фиг. 5 представляет собой блок-схему, иллюстрирующую процедуру управления движением накатом в первом варианте осуществления;
Фиг. 6 представляет собой блок-схему, иллюстрирующую процедуру управления движением накатом во втором варианте осуществления;
Фиг. 7 представляет собой блок-схему, иллюстрирующую конфигурацию системы управления, относящейся к ЭБУ двигателя и ЭБУ сцепления в третьем варианте осуществления;
Фиг. 8 представляет собой схему, иллюстрирующую пример зависимости между величиной работы акселератора и запрошенным крутящим моментом для каждого выбранного режима движения;
Фиг. 9 представляет собой блок-схему, иллюстрирующую процедуру управления движением накатом в третьем варианте осуществления;
Фиг. 10 представляет собой блок-схему, иллюстрирующую конфигурацию системы управления, относящейся к ЭБУ двигателя и ЭБУ сцепления в четвертом варианте осуществления; и
Фиг. 11 представляет собой блок-схему, иллюстрирующую процедуру управления движением накатом в четвертом варианте осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Первый вариант осуществления
[0021] Далее на основе чертежей будет описан первый вариант осуществления изобретения. Первый вариант осуществления описывает случай применения изобретения на автомобиле с приводом на четыре колеса в течение части времени, имеющем в основе заднеприводное (FR) транспортное средство с передним расположением двигателя.
Конфигурация силового агрегата
[0022] Фиг. 1 представляет собой схему, иллюстрирующую схематическую конфигурацию силового агрегата и систему управления транспортного средства в первом варианте осуществления. Как проиллюстрировано на фиг. 1, транспортное средство согласно первому варианту осуществления содержит двигатель 1 в качестве источника приводной мощности для движения, а также устройство 10 передачи мощности, которое может передавать мощность от двигателя 1 на передние колеса 47L, 47R и задние колеса 48L, 48R.
[0023] Устройство 10 передачи мощности включает в себя автоматическое сцепление 2 в качестве блока соединения и разъединения согласно изобретению, устройство 3 переключения (устройство ручного переключения), раздаточную коробку 7, которая может распределять мощность, переданную через устройство 3 переключения, на сторону передних колес 47L, 47R и сторону задних колес 48L, 48R, передний карданный вал 41, задний карданный вал 42, переднее устройство 43 дифференциала, заднее устройство 44 дифференциала, оси 45L, 45R передних колес, и оси 46L, 46R задних колес.
[0024] Устройство 10 передачи мощности, в режиме привода на два колеса (режиме движения с задними колесами 48L, 48R в качестве ведущих колес), передает мощность от двигателя 1 на задние колеса 48L, 48R через автоматическое сцепление 2, устройство 3 переключения, раздаточную коробку 7, задний карданный вал 42, заднее устройство 44 дифференциала, и оси 46L, 46R задних колес. В режиме привода на четыре колеса (режиме движения с задними колесами 48L, 48R и передними колесами 47L, 47R в качестве ведущих колес), мощность, которая распределяется раздаточной коробкой 7, передается на передние колеса 47L, 47R через передний карданный вал 41, переднее устройство 43 дифференциала, и оси 45L, 45R передних колес, в дополнение к передаче мощности в режиме привода на два колеса (передачи мощности на задние колеса 48L, 48R).
Двигатель
[0025] Двигатель 1 представляет собой бензиновый двигатель, который вырабатывает приводную мощность за счет сжигания топлива в цилиндрах. Двигатель 1 управляется ЭБУ 100 двигателя.
Автоматическое сцепление
[0026] Автоматическое сцепление 2 содержит известный коаксиальный рабочий цилиндр 22 (далее именуемый КРЦ 22) и срабатывает в ответ на гидравлическое давление, подаваемое из гидравлического контура 20 сцепления для регулировки состояния включения.
[0027] В частности, привод 8 сцепления срабатывает в соответствии с сигналом управления сцеплением от ЭБУ 200 сцепления для управления гидравлическим давлением, подаваемым из гидравлического контура 20 сцепления, в гидравлическую камеру КРЦ 22. Привод 8 сцепления включает в себя электрический двигатель, замедляющий механизм, главный цилиндр сцепления, и т.п., не показанные и выполненные с возможностью регулировки, посредством работы электрического двигателя, гидравлического давления, создаваемого в главном цилиндре сцепления.
[0028] Когда командный сигнал выключения сцепления в качестве сигнала управления сцеплением выдается из ЭБУ 200 сцепления в состоянии, когда автоматическое сцепление 2 включено, гидравлическое давление подается из гидравлического контура 20 сцепления на КРЦ 22 за счет работы привода 8 сцепления, и КРЦ 22 срабатывает (срабатывает подшипник выключения, входящий в КРЦ 22) на выключение автоматического сцепления 2.
[0029] При этом, когда командный сигнал на включение сцепления в качестве сигнала управления сцеплением выдается из ЭБУ 200 сцепления, подача гидравлического давления из гидравлического контура 20 сцепления останавливается посредством срабатывания привода 8 сцепления, и КРЦ 22 срабатывает (отходит подшипник выключения, входящий в КРЦ 22) на включение автоматического сцепления 2. Конфигурация, которая переключает между состоянием включения и состоянием выключения автоматического сцепления 2, известна, и описана не будет.
[0030] Система сцепления в первом варианте осуществления выполнена в виде, так называемой, системы сцепления с электрическим приводом, в которой привод 8 сцепления срабатывает в соответствии с сигналом управления сцеплением из ЭБУ 200 сцепления для переключения автоматического сцепления 2 между состоянием включения и состоянием выключения. То есть, автоматическое сцепление 2 выполнено в виде «блока соединения и разъединения, который размещен в контуре передачи мощности между источником приводного усилия и ведущими колесами, и обеспечивает, путем работы привода, переключение между состоянием включения, обеспечивающим передачу мощности в контуре передачи мощности, и состоянием выключения, блокирующим передачу мощности» согласно изобретению.
[0031] Примеры формы выходного сигнала управления сцеплением из ЭБУ 200 сцепления включают в себя выходной сигнал управления сцеплением в соответствии с тем, как водитель оперирует педалью 91 сцепления, а также выходной сигнал управления сцеплением без водителя, оперирующего педалью 91 сцепления. То есть, сигнал управления сцеплением может выдаваться из ЭБУ 200 сцепления в соответствии с выходным сигналом от датчика 201 рабочего хода педали сцепления, описанного ниже, после того, как датчик 201 рабочего хода педали сцепления определяет величину работы педали 91 сцепления водителем (степень нажатия на педаль 91 сцепления из положения, где педаль 91 сцепления не выжата (величина работы равна «нулю»)), либо сигнал управления сцеплением может выдаваться из ЭБУ 200 сцепления, даже когда водитель не оперирует педалью 91 сцепления, как при движении накатом, описанном ниже (состоянии движения транспортного средства с блокированной передачей мощности между двигателем 1 и устройством 3 переключения).
[0032] Устройство 3 переключения представляет собой известное устройство ручного переключения (ручную коробку передач) и представляет собой параллельный зубчатый механизм постоянного зацепления, который имеет синхронизирующий механизм и может устанавливать, например, шесть ступеней передних передач и ступень обратной передачи. В устройстве 3 переключения рабочая мощность при действиях водителя рычагом 32 переключения передач приводит в действие заранее заданный синхронизирующий механизм (не показано) через трос 33 селектора и трос 34 переключения, тем самым устанавливая заранее заданную ступень передачи (одну ступень передачи из шести ступеней передних передач и ступени обратной передачи).
[0033] В устройстве 3 переключения, рабочая мощность от рычага 32 переключения передач может передаваться на синхронизирующий механизм через вилковый вал и вилку переключения. Кроме того, устройство 3 переключения может представлять собой, так называемую, автоматизированную ручную трансмиссию (APT). В этом случае, система управления включает в себя ЭБУ ЭУТ (электронное управление трансмиссией), и привод (привод селектора и привод переключения) работает на установку нужной ступени передачи в соответствии с сигналом управления переключением, который выдается из ЭБУ ЭУТ водителем, оперирующим рычагом переключения передач.
Раздаточная коробка
[0034] Раздаточная коробка 7 переключает между режимом привода на два колеса с передачей мощности от двигателя 1 на задние колеса 48L, 48R и режимом привода на четыре колеса с распределением мощности на передние колеса 47L, 47R и заднее колеса 48L, 48R. Кроме того, раздаточная коробка 7 функционирует в качестве вспомогательного механизма переключения, который переключает вращение, передаваемое через устройство 3 переключения, за счет установки либо высокоскоростной ступени Н, либо низкоскоростной ступени L.
[0035] В частности, как проиллюстрировано на фиг. 2 (структурная схема раздаточной коробки 7), вспомогательный механизм 72 переключения, как правило, выполнен с устройством 72а планетарной шестерни, первым выходным валом 73, соединенным с задним карданным валом 42, первым устройством 74 подключения сцепления, которое размещено между вспомогательным механизмом 72 переключения и первым выходным валом 73, и селективно устанавливает низкоскоростную ступень L или высокоскоростную ступень Н, ведущую звездочку 75, размещенную таким образом, что селективно производится переключение, при котором обеспечивается и предотвращается ее вращение относительно первого выходного вала 73, и второе устройство 76 подключения сцепления (устройство переключения 2WD/4WD), которое селективно производит переключение между обеспечением и предотвращением вращения ведущей звездочки 75 относительно первого выходного вала 73, размещенными на осевом центре С1 в кожухе 71 раздаточной коробки 7.
[0036] Второй выходной вал 77, соединенный с передним карданным валом 41 и ведомая звездочка 78, не поворотно размещенная относительно второго выходного вала 77, размещены на осевом центре С2 в кожухе 71 раздаточной коробки. Между ведущей звездочкой 75 и ведомой звездочкой 78 намотана цепь (или ремень и т.п.) 79.
[0037] Раздаточная коробка 7 передает на первый выходной вал 73 через вспомогательный механизм 72 переключения вращение входного вала 7а, который соединен с выходным валом 36 устройства 3 переключения. Состояние, в котором обеспечивается вращение ведущей звездочки 75 относительно первого выходного вала 73, представляет собой режим привода на два колеса, в котором мощность не передается от первого выходного вала 73 на второй выходной вал 77. При этом состояние, в котором предотвращается вращение ведущей звездочки 75 относительно первого выходного вала 73, представляет собой режим привода на четыре колеса, в котором мощность передается от первого выходного вала 73 на второй выходной вал 77 через ведущую звездочку 75, цепь 79, и ведомую звездочку 78.
[0038] Устройство 72а планетарной шестерни вспомогательный механизма 72 переключения имеет солнечную шестерню S1, соединенную с входным валом 7а, кольцевую шестерню R1, не поворотно соединенную с кожухом 71 раздаточной коробки, и водило СА1, которое поддерживает множество сателлитных шестерен Р1 таким образом, чтобы допускать их вращение и поворот, при этом сателлитные шестерни Р1 вступают в зацепление с солнечной шестерней S1 и кольцевой шестерней R1. С такой конфигурацией, скорость вращения водила СА1 уменьшается по отношению к скорости вращения входного вала 7а. Шестерня 74b сцепления синхронизирующего механизма 74а, входящего в первое устройство 74 включения сцепления, жестко закреплена с солнечной шестерней S1. Шестерня 74d сцепления зацепляющей муфты 74 с, входящей в первое устройство 74 включения сцепления, жестко закреплена с водилом СА1.
[0039] Синхронизирующий механизм 74а включает в себя ступицу 74е сцепления, установленную с помощью шлицевого соединения на первом выходном валу 73, не поворотно относительно первого выходного вала 73, цилиндрическую втулку 74f, размещенную не поворотно относительно ступицы 74е сцепления, и с возможностью перемещения по направлению осевого центра за счет шлицевого соединения со ступицей 74е сцепления, шестерню 74b сцепления, а также кольцо 74g синхронизатора, который синхронизирует вращение втулки 74f с вращением шестерни 74b сцепления.
[0040] Втулка 74f перемещается в направлении осевого центра приводом 7А переключения (например, электрическим двигателем). В частности, первый переключающий вилковый вал 7А1 в качестве выходного элемента прикреплен к приводу 7А переключения, а первая вилка 7А2 переключения жестко прикреплена к кончику концевого участка первого переключающего вилкового вала 7А1. Первый переключающий вилковый вал 7А1 движется в направлении осевого центра при срабатывании привода 7А переключения, что перемещает втулку 74f в направлении осевого центра через первую вилку 7А2 переключения. Привод 7А переключения работает в соответствии с сигналом управления от ЭБУ 300 4WD (см. фиг. 1).
[0041] Зацепляющая муфта 74с имеет втулку 74f и шестерню 74d сцепления. Шестерня 74d сцепления имеет внутренние периферийные зубья, которые могут вступать в зацепление с внешними периферийными зубьями 74h, расположенными на внешней периферийной поверхности втулки 74f.
[0042] В первом устройстве 74 включения сцепления, срабатывание привода 7А переключения перемещает втулку 74f в направлении осевого центра, и втулка 74f вступает в зацепление с шестерней 74b сцепления, тем самым устанавливая высокоскоростную ступень Н во вспомогательном механизме 72 переключения. В то время, как втулка 74f движется в направлении осевого центра, и втулка 74f вступает в зацепление с шестерней 74d сцепления, тем самым устанавливая низкоскоростную ступень L во вспомогательном механизме 72 переключения.
[0043] Второе устройство 76 включения сцепления представляет собой устройство переключения 2WD/4WD (механизм переключения ведущих колес согласно изобретению), то есть, например, известную кулачковую муфту сцепления. В частности, второе устройство 76 включения сцепления включает в себя ступицу 76а сцепления, установленную с помощью шлицевого соединения на первом выходном валу 73, не поворотно относительно первого выходного вала 73, цилиндрическую втулку 76b, размещенную не поворотно относительно ступицы 76а сцепления, и с возможностью перемещения в направлении осевого центра за счет шлицевого соединения со ступицей 76а сцепления, и шестерню 75а сцепления, жестко скрепленную с ведущей звездочкой 75. Шестерня 75а сцепления имеет внешние периферийные зубья, которые могут вступать в зацепление с внутренними периферийными зубьями на внутренней периферийной поверхности втулки 76b. Втулка 76b может перемещаться между положением, в котором ведущая звездочка 75 может вращаться относительно первого выходного вала 73, и положением, в котором ведущая звездочка 75 не может вращаться относительно первого выходного вала 73. Втулка 76b перемещается в направлении осевого центра с помощью привода 7А переключения. В частности, второй переключающий вилковый вал 7A3, в качестве выходного элемента, который пролегает в направлении, параллельном направлению осевого центра, прикреплен к приводу 7А переключения, а вторая вилка 7А4 переключения жестко прикреплена к кончику концевого участка второго переключающего вилкового вала 7 A3. Второй переключающий вилковый вал 7А3 перемещается в направлении осевого центра при срабатывании привода 7А переключения, тем самым перемещая втулку 76b в направлении осевого центра через вторую вилку 7А4 переключения.
[0044] Во втором устройстве 76 включения сцепления, втулка 76b находится в положении, проиллюстрированном на фиг. 2 по отношению к ступице 76а сцепления, когда привод 7А переключения не приведен в действие. В этом положении, соединение между втулкой 76b и шестерней 75а сцепления разъединено, и ведущая звездочка 75 может вращаться вокруг осевого центра С1 относительно первого выходного вала 73. Поскольку ведущая звездочка 75 вращается вхолостую по отношению к первому выходному валу 73, мощность не передается на сторону второго выходного вала 77 через ведущую звездочку 75 (состояние привода на два колеса). При этом, когда срабатывание привода 7А переключения перемещает втулку 76b на сторону ведущей звездочки 75 и заставляет втулку 76b вступать в зацепление с шестерней 75а сцепления, предотвращается вращение ведущей звездочки 75 вокруг осевого центра С1 относительно первого выходного вала 73. Соответственно, ведущая звездочка 75 вращается за одно целое с первым выходным валом 73, и мощность передается на сторону второго выходного вала 77 через ведущую звездочку 75, цепь 79, и ведомую звездочку 78 (состояние привода на четыре колеса).
Заднее устройство дифференциала
[0045] Как проиллюстрировано на фиг. 3, заднее устройство 44 дифференциала включает в себя кожух 44а, кольцевую шестерню 44с, которая вступает в зацепление с приводной ведущей шестерней 44b, корпус 44d дифференциала, шестеренный вал 44е, ведущие шестерни 44f, вращательно установленные на шестеренном валу 44е, боковые шестерни 44g, которые соответственно установлены с помощью шлицевого соединения на оси 46L, 46R задних колес, и вступают в зацепление с ведущими шестернями 44f, а также механизм 49 блокировки заднего устройства дифференциала, который предотвращает разность скоростей в заднем устройстве 44 дифференциала.
[0046] Задний карданный вал 42 опирается с возможностью вращения в кожухе 44а на конический роликовый подшипник В1. Кроме того, приводная ведущая шестерня 44b интегрирована с задним концевым участком заднего карданного вала 42. Приводная ведущая шестерня 44b вступает в зацепление с кольцевой шестерней 44с.
[0047] Кольцевая шестерня 44с жестко прикреплена к корпусу 44d дифференциала. Корпус 44d дифференциала вращательно опирается в кожухе 44а на множество конических роликовых подшипников В2.
[0048] Шестеренный вал 44е выполнен за одно целое с корпусом 44d дифференциала.
[0049] На шестеренном валу 44е, ведущие шестерни 44f выполнены с возможностью вращения в периферийном направлении шестеренного вала 44е и коаксиальны с шестеренным валом 44е.
[0050] Внутреннее пространство корпуса 44d дифференциала вмещает в себя боковые шестерни 44g, который соответственно подогнаны со шлицевыми пазами, расположенных на внешних окружных поверхностях внутренних концевых участков осей 46L, 46R задних колес.
[0051] Зацепляющие зубья 44h расположены на кольцевой поверхности, которая формирует один конец (правый конец на фиг. 3) корпуса 44d дифференциала.
[0052] Механизм 49 блокировки заднего устройства дифференциала переключается между состоянием ВКЛ блокировки дифференциала (состоянием предотвращения срабатывания) и состоянием ВЫКЛ блокировки дифференциала (состоянием разрешения срабатывания) заднего устройства 44 дифференциала и включает в себя привод 49а блокировки заднего устройства дифференциала, вилку 49b переключения блокировки дифференциала, и втулку 49с блокировки дифференциала.
[0053] Привод 49а блокировки заднего устройства дифференциала срабатывает в соответствии с сигналом управления на блокировку дифференциала от ЭБУ 300 4WD. Переключатель 303 блокировки заднего устройства дифференциала (см. фиг. 1) расположен в кабине транспортного средства, и сигнал ВКЛ блокировки дифференциала или сигнал ВЫКЛ блокировки дифференциала выдается из ЭБУ 300 4WD на привод 49а блокировки заднего устройства дифференциала в соответствии с тем, как водитель оперирует переключателем 303 блокировки заднего устройства дифференциала.
[0054] Вилка 49b переключения блокировки дифференциала включена в состав привода 49а блокировки заднего устройства дифференциала. Концевая часть вилки 49b переключения блокировки дифференциала входит в зацепление с пазом, расположенным во втулке 49с блокировки дифференциала.
[0055] Втулка 49с блокировки дифференциала представляет собой кольцевой элемент. Выступающие участки, имеющие форму шлицев и пролегающие в осевом направлении, выполнены на внутренней периферийной поверхности втулки 49с блокировки дифференциала. Втулка 49с блокировки дифференциала размещена с возможностью перемещения в осевом направлении оси 46R заднего колеса и с возможностью вращения за одно целое с осью 46R заднего колеса путем зацепления выступающих частей со шлицевыми пазами, расположенными на внешней периферийной поверхности на внутреннем концевом участке оси 46R заднего колеса. Кроме того, на втулке 49с блокировки дифференциала, зубья 49d зацепления размещены, чтобы быть обращенными к зубьям зацепления корпуса 44d дифференциала.
[0056] Заднее устройство 44 дифференциала переключается между состоянием, обеспечивающим срабатывание дифференциала (состояние ВЫКЛ блокировки дифференциала), и состоянием, предотвращающим срабатывание дифференциала (состояние ВКЛ блокировки дифференциала). То есть, когда сигнал ВКЛ блокировки дифференциала выдается из ЭБУ 300 4WD за счет нажатия водителем на переключатель 303 блокировки заднего устройства дифференциала, привод 49а блокировки заднего устройства дифференциала перемещает втулку 49с блокировки дифференциала в сторону корпуса 44d дифференциала посредством вилки 49b переключения блокировки дифференциала, и вводит в зацепление зубья 44h зацепления с зубьями 49d зацепления, тем самым устанавливая состояние ВКЛ блокировки дифференциала. То есть, введение в зацепление зубьев 44h зацепления с зубьями 49d зацепления заставляет корпус 44d дифференциала и оси 46L, 46R задних колес вращаться за одно целое. При этом, когда сигнал ВЫКЛ блокировки дифференциала выдается из ЭБУ 300 4WD за счет повторного нажатия водителем на переключатель 303 блокировки заднего дифференциала, задний привод 49а блокировки дифференциала перемещает втулку 49с блокировки дифференциала в противоположную сторону от корпуса 44d дифференциала посредством вилки 49b переключения блокировки дифференциала, и выводит из зацепления зубья 44h зацепления и зубьев 49d зацепления, тем самым устанавливая состояние ВЫКЛ блокировки дифференциала.
Конфигурация системы управления
[0057] Далее с использованием фиг. 4 будет описана конфигурация системы управления, относящаяся к каждому из ЭБУ 100-300.
[0058] Каждый из ЭБУ 100-300 включает в себя входные и выходные интерфейсы и микрокомпьютер, который оснащен ЦП, ПЗУ, ОЗУ и резервным ОЗУ.
[0059] Датчик 101 рабочего хода педали акселератора, который выдает сигнал, соответствующий величине работы педали 51 акселератора (см. фиг. 1), датчик 102 угла поворота коленчатого вала, который выдает сигнал, соответствующий положению угла вращения коленчатого вала, датчик 103 степени открытия дроссельной заслонки, который выдает сигнал, соответствующий степени открытия дроссельной заслонки (не показана), входящей в систему впуска двигателя 1, датчик 104 температуры охлаждения, который выдает сигнал, соответствующий температуре охлаждения двигателя 1, и т.п. соединены с входным интерфейсом ЭБУ 100 двигателя.
[0060] Электродвигатель 13 управления дроссельной заслонкой, инжектор 15, воспламенитель 16 свечи зажигания, и т.п. соединены с выходным интерфейсом ЭБУ 100 двигателя.
[0061] ЭБУ 100 двигателя определяет рабочее состояние двигателя 1 на основе информации различного типа, поступающей от каждого датчика, и управляет работой двигателя 1, например, посредством управления электродвигателем 13 управления дроссельной заслонкой (регулирование объема всасывания), посредством управления инжектором 15 (управление впрыском топлива) и посредством управления воспламенителем 16 (управление моментом зажигания).
[0062] А датчик 201 рабочего хода педали сцепления, который выдает сигнал, соответствующий величине работы педали 91 сцепления, датчик 202 рабочего хода педали тормоза, который выдает сигнал, соответствующий величине работы педали 53 тормоза, датчик 203 скорости вращения входного вала, который выдает сигнал, соответствующий скорости вращения входного вала устройства 3 переключения, датчик 204 скорости вращения выходного вала, который выдает сигнал, соответствующий скорости вращения выходного вала устройства 3 переключения, переключатель 205 на нейтраль, который определяет, действительно или нет рабочее положение рычага 32 переключения передач находится в нейтральном положении, датчик 206 рабочего хода сцепления, который определяет рабочий ход сцепления в автоматическом сцеплении 2 (определяет, например, положение скользящего передвижения подшипника выключения КРЦ 22), и т.п., соединены с входным интерфейсом ЭБУ 2000 сцепления.
[0063] Привод 8 сцепления и т.п. соединены с выходным интерфейсом ЭБУ 200 сцепления.
[0064] Датчик 302 положения шкалы, переключатель 303 блокировки заднего устройства дифференциала, и т.п. соединены с входным интерфейсом ЭБУ 300 4WD.
[0065] Многопозиционный переключатель 301 переключения состояния привода (см. фиг. 1), которым водитель оперирует во время выбора либо состояния привода на два колеса, либо состояния привода на четыре колеса, расположен около водительского кресла в кабине транспортного средства. Датчик 302 положения шкалы выдает сигнал, соответствующий рабочему положению многопозиционного переключателя 301 переключения состояния привода, на ЭБУ 300 4WD. Более конкретно, многопозиционный переключатель 301 переключения состояния привода позволяет водителю вручную выбрать один из режимов - высокоскоростной режим с приводом на два колеса (H-2WD) (высокую скорость и режим привода на два колеса), в котором вспомогательный механизм 72 переключения находится на высокоскоростной ступени Н в режиме привода на два колеса, высокоскоростной режим с приводом на четыре колеса (H-4WD) (высокую скорость и режим привода на четыре колеса), в котором вспомогательный механизм 72 переключения находится на высокоскоростной ступени Н в режиме привода на четыре колеса, а также низкоскоростной режим с приводом на четыре колеса (L-4WD) (низкая скорость и режим привода на четыре колеса), в котором вспомогательный механизм 72 переключения находится на низкоскоростной ступени L в режиме привода на четыре колеса. Датчик 302 положения шкалы выдает на ЭБУ 300 4WD, сигнал, соответствующий режиму движения, выбранному с помощью многопозиционного переключателя 301 переключения состояния привода.
[0066] Переключатель 303 блокировки заднего устройства дифференциала представляет собой кнопочный переключатель, который поочередно выдает сигнал ВКЛ блокировки дифференциала и сигнал ВЫКЛ блокировки дифференциала каждый раз, когда водитель нажимает на переключатель 303 блокировки заднего устройства дифференциала. Как описано выше, нажатие на переключатель 303 блокировки заднего устройства дифференциала выдает сигнал ВКЛ блокировки дифференциала и запускает режим ВКЛ блокировки дифференциала, при котором механизм 49 блокировки заднего устройства дифференциала находится в состоянии ВКЛ блокировки дифференциала. Кроме того, повторное нажатие на переключатель 303 блокировки заднего устройства дифференциала выдает сигнал ВЫКЛ блокировки дифференциала и запускает режим ВЫКЛ блокировки дифференциала, в котором механизм 49 блокировки заднего устройства дифференциала находится в состоянии ВЫКЛ блокировки дифференциала.
[0067] Таким образом, и многопозиционный переключатель 301 переключения состояния привода, и переключатель 303 блокировки заднего дифференциала соответствует исполнительному механизму для переключения режима согласно изобретению (исполнительному механизму для переключения режима, который водитель переключает во время выбора одного из режимов движения из множества режимов движения).
[0068] Привод 7А переключения и привод 49а блокировки заднего устройства дифференциала соединены с выходным интерфейсом ЭБУ 300 4WD.
[0069] ЭБУ 100-300 соединены друг с другом с помощью двунаправленной шины для передачи и получения информации между ними.
Управление движением накатом
[0070] Далее будет описано управление движением накатом, которое представляет собой признак первого варианта осуществления.
[0071] Движение накатом представляет собой состояние движения по инерции путем выключения автоматического сцепления 2 во время движения транспортного средства. Движение накатом не создает энергии торможения за счет сопротивления двигателя 1 (так называемое торможение двигателем), и, тем самым, может увеличить расстояние движения по инерции и повысить топливную эффективность двигателя 1. В состоянии движения накатом, двигатель 1 может быть остановлен (скорость вращения двигателя 1 устанавливается на «ноль» путем остановки впрыска топлива из инжектора 15 и остановки воспламенения свечи зажигания), либо двигатель 1 может приводиться в действие (приводиться в действие приблизительно на скорости вращения холостого хода) (может именоваться движением по инерции на холостом ходу). В первом варианте осуществления описан случай движения накатом путем остановки двигателя 1.
[0072] Условие начала движения накатом устанавливается, когда состояние, в котором не нажата ни педаль 51 акселератора, ни педаль 53 тормоза, ни педаль 91 сцепления (состояние, где величина работы равна «нулю» или почти «нулю»), продолжается заранее заданную продолжительность времени (например, приблизительно три секунды), со скоростью транспортного средства, которая больше или равна заранее заданному значению во время движения транспортного средства. В дополнение к этому условию, условие начала движения накатом может включать в себя условие, чтобы угол поворота руля был меньше заранее заданного угла. В качестве условия окончания движения накатом устанавливается, когда будет выжата, по меньшей мере, одна из педалей либо педаль 51 акселератора, либо педаль 53 тормоза, либо педаль 91 сцепления, или же, когда во время движения накатом скорость транспортного средства уменьшается до величины, которая меньше, чем заранее заданная величина. Условие окончания движения накатом может представлять собой условие, при котором угол поворота руля будет больше или равен заранее заданному углу.
[0073] Движение накатом соответствует «движению по инерции, при котором блок соединения и разъединения выключен путем работы привода, когда установлено заранее заданное условие начала движения по инерции» согласно изобретению.
[0074] В известном уровне техники, движение накатом начинается, когда устанавливается условие начала движения накатом, независимо от режима движения (режима привода на четыре колеса или режима привода на два колеса, и режима ВКЛ блокировки дифференциала или режима ВЫКЛ блокировки дифференциала, описанных выше). Таким образом, мощность от двигателя не передается на колеса во время движения накатом, и даже, когда водитель, запрашивающий высокие ходовые характеристики (высокие ходовые характеристики для дороги с неровным покрытием или высокие ходовые характеристики устойчивости), выбирает режим движения, запрос может быть не удовлетворен. Например, даже когда выбран режим привода на четыре колеса в транспортном средстве, разрешающем водителю вручную выбрать один из режимов - либо режим привода на два колеса, либо режим привода на четыре колеса, как описано выше, то есть, даже когда водитель запрашивает высокие ходовые характеристики для дороги с неровным покрытием, запрос может быть не удовлетворен при движении накатом. То есть, дорожные качества транспортного средства снижаются из-за выполнения движения накатом.
[0075] С этой точки зрения, первый вариант осуществления повышает дорожные качества транспортного средства, допускающего движение накатом.
[0076] В частности, когда многопозиционный переключатель переключения состояния привода (исполнительный механизм для переключения режима) 301 используется для выбора режима привода на четыре колеса (первого режима согласно изобретению) в качестве режима движения во время движения накатом, выполняемого путем установки условия начала движения накатом, то есть, когда режим движения переключается из режима привода на два колеса (второго режима согласно изобретению) в режим привода на четыре колеса, движение накатом заканчивается (выключается), и автоматическое сцепление 2 переводится в состояние включения из состояния выключения. Когда многопозиционный переключатель 301 переключения состояния привода изменяет режим движения на режим привода на четыре колеса, движение накатом не начинается (не выполняется), даже с установкой условия начала движения накатом, и поддерживается состояние включения автоматического сцепления 2. Соответственно, движение накатом предотвращается во время движения в режиме привода на четыре колеса, и водитель может достичь запрашиваемых высоких ходовых характеристик (высокие ходовые характеристики для дороги с неровным покрытием) и достичь предпочтительных ходовых качеств.
[0077] Когда переключатель 303 блокировки заднего устройства дифференциала (исполнительный механизм для переключения режима) срабатывает на переключение режима ВКЛ блокировки дифференциала (первого режима согласно изобретению) в качестве режима движения во время движения накатом, выполняемого путем установки условия начала движения накатом, то есть, когда режим движения переключается из режима ВЫКЛ блокировки дифференциала (второго режима согласно изобретению) в режим ВКЛ блокировки дифференциала, движение накатом заканчивается (выключается), и автоматическое сцепление 2 переводится в состояние включения из состояния выключения. Когда переключатель 303 блокировки заднего устройства дифференциала изменяет режим движения на режим ВКЛ блокировки дифференциала, движение накатом не начинается (не выполняется) даже с установкой условия начала движения накатом, и поддерживается состояние включения автоматического сцепления 2. Соответственно, движение накатом предотвращается во время движения в режиме ВКЛ блокировки дифференциала, и водитель может достичь запрашиваемых высоких ходовых характеристик (высокие ходовые характеристики устойчивости) и достичь предпочтительных ходовых качеств.
[0078] Управление движением накатом выполняется ЭБУ 200 сцепления. Таким образом, функциональная часть ЭБУ 200 сцепления, который выполняет управление движением накатом, выполнена в качестве блока предотвращения движения по инерции, согласно изобретению (блока предотвращения движения по инерции, который выполняет, по меньшей мере, одно из управлений - либо управление окончанием движения по инерции, либо управление не выполнением движения по инерции, управление завершением движения по инерции, завершающего движение по инерции, когда исполнительный механизм для переключения режима используется для выбора первого режима, имеющего более высокие ходовые характеристики, чем второй режим во время движения по инерции, выполняемый путем установки условия начала движения по инерции, и управление не выполнением движения по инерции, не выполняющего движение по инерции, даже с установкой условия начала движения по инерции, когда исполнительный механизм для переключения режима изменяет режим движения на первый режим).
[0079] Далее будет описана процедура управления движением накатом со ссылкой на блок-схему на фиг. 5. Блок-схема повторяется на заранее заданном отрезке времени во время движения транспортного средства. Определение того, действительно или нет транспортное средство приведено в движение, выполняется на основе выходного сигнала датчика 204 скорости вращения выходного вала. Индикатор выполнения движения накатом, описанного ниже, сбрасывается на «0», когда движение начинается немедленно после запуска двигателя.
[0080] Сначала, на этапе ST1, выполняется определение того, действительно или нет индикатор выполнения движения накатом, заранее сохраняемый в ЭБУ 200 сцепления, устанавливается на «1». Индикатор выполнения движения накатом устанавливается на «1» во время начала движения накатом и сбрасывается на «0» во время окончания (выключения) движения накатом.
[0081] Когда начинается движение транспортного средства, индикатор выполнения движения накатом сбрасывается на «0». Таким образом, на этапе ST1 выполняется определение НЕТ, и выполняется переход на этап ST2. На этапе ST2, выполняется определение того, действительно или нет установлено условие начала движения накатом. Как описано выше, условие начала движения накатом установлено, когда состояние, при котором не нажата ни одна из педалей - ни педаль 51 акселератора, ни педаль 53 тормоза, ни педаль 91 сцепления (состояние, при котором величина работы равна «нулю» или приблизительно «нулю») продолжается заранее заданную продолжительность времени (например, приблизительно три секунды) со скоростью транспортного средства, которая больше или равна заранее заданной величине во время движения транспортного средства. Величину работы педали 51 акселератора получают на основе выходного сигнала от датчика 101 рабочего хода педали акселератора. Величину работы педали 53 тормоза получают на основе выходного сигнала от датчика 202 рабочего хода педали тормоза. Величину работы педали 91 сцепления получают на основе выходного сигнала от датчика 201 рабочего хода педали сцепления. Скорость транспортного средства вычисляют на основе выходного сигнала от датчика 204 скорости вращения выходного вала.
[0082] Когда начинается движение транспортного средства, обычно задействована педаль 51 акселератора для ускорения транспортного средства, либо задействована педаль 91 сцепления для переключения устройства 3 переключения. Таким образом, определение НЕТ выполняется на этапе ST2, и выполняется возврат. Таким образом, операции этапа ST1 (определение НЕТ на этапе ST1) и этапа ST2 (определение НЕТ на этапе ST2) повторяются до установления условия начала движения накатом.
[0083] Когда определение ДА выполняется на этапе ST2 с установкой условия начала движения накатом, выполняется переход на этап ST3, на котором выполняется определение того, действительно или нет текущий режим движения представляет собой режим привода на четыре колеса. То есть, выполняется определение того, действительно или нет рабочее положение многопозиционного переключателя 301 переключения состояния привода, распознанное на основе выходного сигнала от датчика 302 положения шкалы, находится в положении режима привода на четыре колеса (положении H-4WD или положении L-4WD на фиг. 1).
[0084] Когда текущий режим движения представляет собой режим привода на четыре колеса, определение ДА выполняется на этапе ST3, и выполняется возврат. То есть, выполняется возврат без начала движения накатом (при включенном автоматическом сцеплении 2). Даже когда условие начала движения накатом устанавливается в режиме привода на четыре колеса, состояние включения автоматического сцепления 2 поддерживается, и движение накатом не начинается. Соответственно, движение накатом предотвращается во время движения в режиме привода на четыре колеса, и водитель может обеспечить запрашиваемые высокие ходовые характеристики по дороге с неровным покрытием и достичь предпочтительных ходовых качеств.
[0085] В то время как режим привода на четыре колеса продолжается, операции этапа ST1 (определение НЕТ на этапе ST1), этапа ST2 (определение ДА на этапе ST2), и этапа ST3 (определение ДА на этапе ST3) повторяются даже с установкой условия начала движения накатом.
[0086] Когда режим движения во время установки условия начала движения накатом представляет собой режим привода на два колеса, определение НЕТ выполняется на этапе ST3, и выполняется переход на этап ST4. На этапе ST4 выполняется определение того, действительно или нет текущий режим движения представляет собой режим ВКЛ блокировки дифференциала. То есть, определение того, действительно или нет режим движения представляет собой режим ВКЛ блокировки дифференциала, выполняется на основе выходного сигнала от переключателя 303 блокировки заднего устройства дифференциала.
[0087] Когда текущий режим движения представляет собой режим ВКЛ блокировки дифференциала, определение ДА выполняется на этапе ST4, и выполняется возврат. То есть, выполняется возврат без начала движения накатом (с не выключенным автоматическим сцеплением 2). Даже когда условие начала движения накатом устанавливается в режиме ВКЛ устройства блокировки дифференциала, состояние включения автоматического сцепления 2 поддерживается, и движение накатом не начинается. Соответственно, движение накатом предотвращается во время движения в режиме ВКЛ блокировки дифференциала, и водитель может достичь запрошенные высокие ходовые характеристики устойчивости и достичь предпочтительных ходовых качеств.
[0088] В то время, пока длится режим ВКЛ блокировки дифференциала, операции этапа ST1 (определение НЕТ на этапе ST1), этапа ST2 (определение ДА на этапе ST2), этапа ST3 (определение НЕТ на этапе ST3), и этапа ST4 (определение ДА на этапе ST4) повторяются, даже когда условие начала движения накатом устанавливается в режиме привода на два колеса.
[0089] Когда режим движения во время установки условия начала движения накатом представляет собой режим привода на два колеса и режим ВЫКЛ блокировки дифференциала, определение НЕТ выполняется на этапе ST4, и выполняется переход на этап ST5, на котором начинается движение накатом. То есть, командный сигнал выключения сцепления выдается из ЭБУ 200 сцепления на выключение автоматического сцепления 2. Кроме того, двигатель 1 останавливается за счет остановки впрыска топлива из инжектора 15 и остановки воспламенения свечи зажигания. Далее выполняется переход на этап ST6, на котором индикатор выполнения движения накатом устанавливается на «1».
[0090] После начала движения накатом, выполняется переход на этап ST7, на котором выполняется определение того, действительно или нет режим движения переключается из режима привода на два колеса в режим привода на четыре колеса. То есть, выполняется определение того, действительно или нет рабочее положение многопозиционного переключателя 301 переключения состояния привода, распознанное на основе выходного сигнала от датчика 302 положения шкалы, переключается из положения выбора режима привода на два колеса (положение H-2WD на фиг. 1) в положение выбора режима привода на четыре колеса (положение H-4WD или положение L-4WD на фиг. 1).
[0091] Когда определение НЕТ выполняется на этапе ST7 без переключения режима движения в режим привода на четыре колеса, выполняется переход на этап ST8, на котором выполняется определение того, действительно или нет режим движения переключается из режима ВЫКЛ блокировки дифференциала в режим ВКЛ блокировки дифференциала. То есть, определение того, действительно или нет выбран режим ВКЛ блокировки дифференциала, выполняется на основе выходного сигнала от переключателя 303 блокировки заднего устройства дифференциала.
[0092] Когда определение НЕТ выполняется на этапе ST8 при условии, что режим ВКЛ блокировки дифференциала не выбран, выполняется переход на этап ST9, на котором выполняется определение того, действительно или нет установлено условие окончания движения накатом. Как описано выше, когда нажата педаль 51 акселератора, педаль 53 тормоза, или педаль 91 сцепления, или, когда скорость транспортного средства уменьшается до значения, которое меньше, чем заранее заданное значение, условие окончания движения накатом устанавливается, и определение ДА выполняется на этапе ST9.
[0093] Когда определение НЕТ выполняется на этапе ST9 при еще не установленном условии окончания движения накатом, выполняется возврат.
[0094] В следующей процедуре определение ДА выполняется на этапе ST1, поскольку индикатор выполнения движения накатом установлен на «1» в предыдущей процедуре, и выполняется переход на этап ST7, на котором выполняется определение того, действительно или нет режим движения переключается из режима привода на два колеса в режим привода на четыре колеса, как описано выше. Операции этапов ST1, ST7, ST8, и ST9 повторяются в ситуации, когда режим движения не переключается в режим привода на четыре колеса, когда режим движения не переключается из режима ВЫКЛ блокировки дифференциала в режим ВКЛ блокировки дифференциала на этапе ST8, и когда условие окончания движения накатом не установилось.
[0095] Когда установлено условие окончания движения накатом, определение ДА выполняется на этапе ST9, и выполняется переход на этап ST10, на котором движение накатом заканчивается. То есть, командный сигнал включения сцепления выдается из ЭБУ 200 сцепления на включение автоматического сцепления 2. Кроме того, запускается двигатель 1. Двигатель 1 запускается за счет задействования не показанного стартера, для начала проворачивания двигателя 1 и начала подачи топлива из инжектора 15, а также воспламенения свечи зажигания с помощью воспламенителя 16. Заданная скорость вращения двигателя 1 в этом случае устанавливается в соответствии с величиной работы педали 51 акселератора, которую получают на основе выходного сигнала от датчика 101 рабочего хода педали акселератора. То есть, когда условие окончания движения накатом при нажатии на педаль 51 акселератора установлено, заданная скорость вращения соответствует величине нажатия на педаль 51 акселератора. Когда условие окончания движения накатом устанавливается посредством других операций, заданная скорость вращения представляет собой скорость вращения на холостом ходу.
[0096] Затем выполняется переход на этап ST11, на котором индикатор выполнения движения накатом сбрасывается на «0», и выполняется возврат.
[0097] Когда режим движения переключается из режима привода на два колеса в режим привода на четыре колеса во время движения накатом, определение ДА выполняется на этапе ST7, и выполняется переход на этап ST10. Даже без переключения режима движения в режим привода на четыре колеса во время движения накатом (определение НЕТ на этапе ST7), когда режим движения переключается из режима ВЫКЛ блокировки дифференциала в режим ВКЛ блокировки дифференциала во время движения накатом, определение ДА выполняется на этапе ST8, и выполняется переход на этап ST10. На этапе ST10, движение накатом заканчивается, как описано выше. В этом случае также, командный сигнал включения сцепления выдается из ЭБУ 200 сцепления на включение автоматического сцепления 2. Кроме того, запускается двигатель 1. Выбор режима привода на четыре колеса или выбор режима ВКЛ блокировки дифференциала во время движения накатом выключает движение накатом и переводит автоматическое сцепление 2 из состояния выключения в состояние включения. Соответственно, когда движение накатом заканчивается за счет переключения в режим привода на четыре колеса, водитель получает запрашиваемые высокие ходовые характеристики по дороге с неровным покрытием (высокие ходовые характеристики по дороге с неровным покрытием от движения с приводом на четыре колеса). Когда движение накатом заканчивается за счет переключения в режим ВКЛ устройства блокировки дифференциала, водитель получает запрашиваемые высокие ходовые характеристики устойчивости (высокие ходовые характеристики устойчивости от ВКЛ блокировки дифференциала).
[0098] После того как движение накатом заканчивается, выполняется переход на этап ST11, на котором индикатор выполнения движения накатом сбрасывается на «0», и выполняется возврат.
[0099] Вышеуказанные операции повторяются на заранее заданном промежутке времени.
[0100] Посредством выполнения вышеуказанных операций, вышеупомянутая операция, которая приводит к определению ДА на этапе ST2 и определению ДА на этапе ST3, а также вышеуказанная операция, которая приводит к определению ДА на этапе ST2, определению НЕТ на этапе ST3, и определению ДА на этапе ST4, включены в работу блока предотвращения движения по инерции согласно изобретению, и соответствуют «управлению не выполнением движения по инерции, которое не выполняет движение по инерции даже с установкой условия начала движения по инерции, когда исполнительный механизм для переключения режима изменяет режим движения на первый режим». Вышеуказанная операция, которая обусловливает результат ДА на этапе ST7 и окончание движения накатом на этапе ST10, и вышеуказанная операция, которая обусловливает определение ДА на этапе ST8 и окончание движения накатом на этапе ST10, включены в работу блока предотвращения движения по инерции согласно изобретению, и соответствуют «управлению окончанием движения по инерции, которое завершает движение по инерции, когда исполнительный механизм для переключения режима используется для выбора первого режима, имеющего более высокие ходовые характеристики, чем второй режим во время движения по инерции, выполняемого путем установки условия начала движения по инерции».
[0101] Как описано ранее, в первом варианте осуществления, когда многопозиционный переключатель 301 переключения состояния привода (исполнительный механизм для переключения режима) используется для выбора режима привода на четыре колеса в качестве режима движения во время движения накатом, выполняемого путем установки условия начала движения накатом, движение накатом завершается (выключается), и автоматическое сцепление 2 переводится в состояние включения из состояния выключения. Когда многопозиционный переключатель 301 переключения состояния привода изменяет режим движения на режим привода на четыре колеса, движение накатом не начинается (не выполняется) даже при установке условия начала движения накатом, и поддерживается состояние включения автоматического сцепления 2. Когда переключатель 303 блокировки заднего устройства дифференциала (исполнительный механизм для переключения режима) используется для выбора режима ВКЛ блокировки дифференциала в качестве режима движения во время движения накатом, выполняемого путем установки условия начала движения накатом, движение накатом заканчивается (выключается), и автоматическое сцепление 2 переводится в состояние включения из состояния выключения. Когда переключатель 303 блокировки заднего устройства дифференциала изменяет режим движения на режим ВКЛ блокировки дифференциала, движение накатом не начинается (не выполняется) даже при установке условия начала движения накатом, и поддерживается состояние включения автоматического сцепления 2.
[0102] Соответственно, движение накатом предотвращается во время движения в режиме привода на четыре колеса или движения в режиме ВКЛ блокировки дифференциала, и водитель может получить запрашиваемые высокие ходовые характеристики (высокие ходовые характеристики по дороге с неровным покрытием или высокие ходовые характеристики устойчивости). Как следствие, можно получить более предпочтительные ходовые качества, чем в известном уровне техники (выполнение движения по инерции путем установки условия начала движения по инерции даже в режиме движения, имеющем высокие ходовые характеристики).
[0103] В частности, водитель с большой вероятностью запросит движение в режиме привода на четыре колеса на дороге при подъеме в гору или на спуске. В этом случае, когда выполняется движение накатом, транспортное средство может проскальзывать из-за потери крутящего момента на подъеме в гору, или может произойти непреднамеренное ускорение из-за потери крутящего момента на спуске (потери отрицательного крутящего момента в качестве тормозной энергии от колес в ведомом состоянии). Однако первый вариант осуществления может предотвращать возникновение таких ситуаций.
[0104] Когда движение накатом выполняется в режиме ВКЛ блокировки дифференциала, который подразумевает движение по каменистой дороге или т.п., транспортное средство может вести себя неустойчиво из-за того, что мощность привода не передается на приводные колеса. Первый вариант осуществления предотвращает движение накатом во время движения в режиме ВКЛ блокировки дифференциала, и, таким образом, может стабилизировать скоростные характеристики транспортного средства.
[0105] В первом варианте осуществления разрешение и предотвращение движения накатом переключаются в соответствии с действиями водителя, использующего многопозиционный переключатель 301 переключения состояния привода или использующего переключатель 303 блокировки заднего устройства дифференциала. Таким образом, может выполняться управление, которое отражает намерения водителя, по сравнению с автоматическим переключением между разрешением и предотвращением движения накатом в соответствии со статусом движения транспортного средства, состоянием дорожного покрытия, и т.п.
Второй вариант осуществления
[0106] Далее, основываясь на чертежах, будет описан второй вариант осуществления изобретения. В первом варианте осуществления, предотвращается движение накатом, когда, по меньшей мере, выбран либо режим привода на четыре колеса, либо режим ВКЛ блокировки дифференциала. Напротив, второй вариант осуществления предотвращает движение накатом, когда выбран низкоскоростной режим, в котором вспомогательный механизм 72 переключения находится на низкоскоростной ступени L. Другие конфигурации и операции являются такими же, что и в первом варианте осуществления. Отличия от первого варианта осуществления будут описаны далее.
[0107] Во втором варианте осуществления, когда многопозиционный переключатель 301 переключения состояния привода используется для выбора низкоскоростного режима (первого режима согласно изобретению) в качестве режима движения во время движения накатом, выполняемого путем установки условия начала движения накатом, то есть, когда режим движения переключается из высокоскоростного режима (второго режима согласно изобретению) в низкоскоростной режим, движение накатом заканчивается (выключается), и автоматическое сцепление 2 переводится в состояние включения из состояния выключения. Когда многопозиционный переключатель 301 переключения состояния привода изменяет режим движения на низкоскоростной режим, движение накатом не начинается (не выполняется) даже при установке условия начала движения накатом, и поддерживается состояние включения автоматического сцепления 2. Соответственно, движение накатом предотвращается во время движения в низкоскоростном режиме, и водитель может достичь запрашиваемых высоких ходовых характеристики (высокие ходовые характеристики на дороге с неровным покрытием) и достичь предпочтительные ходовые качества.
[0108] Управление движением накатом выполняется ЭБУ 200 сцепления. Таким образом, функциональная часть ЭБУ 200 сцепления, которое выполняет управление движением накатом, служит, согласно изобретению, в качестве блока предотвращения движения по инерции.
[0109] Фиг. 6 представляет собой блок-схему, иллюстрирующую процедуру управления движением накатом согласно второму варианту осуществления. Операции этапов ST1, ST2, ST5, ST6, и ST9-ST11 на блок-схеме такие же, что и операции этапов ST1, ST2, ST5, ST6, и ST9-ST11 на блок-схеме, проиллюстрированной на фиг. 5 в первом варианте осуществления. Таким образом, операции этих этапов описаны не будут.
[0110] На блок-схеме на фиг. 6, когда определение ДА выполняется на этапе ST2 с установкой условия начала движения накатом, выполняется переход на этап ST13, на котором выполняется определение того, действительно или нет текущий режим движения представляет собой низкоскоростной режим. То есть, выполняется определение того, действительно или нет рабочее положение многопозиционного переключателя 301 переключения состояния привода, распознанное на основе выходного сигнала от датчика 302 положения шкалы находится в положении низкоскоростного режима с приводом на четыре колеса (положение L-4WD на фиг. 1).
[0111] Когда текущий режим движения представляет собой низкоскоростной режим, определение ДА выполняется на этапе ST13, и выполняется возврат. То есть, выполняется возврат без начала движения накатом (с не выключенным автоматическим сцеплением 2). Даже когда при низкоскоростном режиме установлено условие начала движения накатом, поддерживается состояние включения автоматического сцепления 2, и движение накатом не начинается. Соответственно, движение накатом предотвращается во время движения в низкоскоростном режиме, и водитель может достичь запрашиваемых высоких ходовых характеристик движения по дороге с неровным покрытием и достичь предпочтительных ходовых качеств.
[0112] В то время как низкоскоростной режим продолжается, операции этапа ST1 (определение НЕТ на этапе ST1), этапа ST2 (определение ДА на этапе ST2), и этапа ST13 (определение ДА на этапе ST13) повторяются даже с установкой условия начала движения накатом.
[0113] Когда режим движения во время установки условия начала движения накатом представляет собой высокоскоростной режим, определение НЕТ выполняется на этапе ST13, и выполняется переход на этап ST5, на котором начинается движение накатом, как описано выше.
[0114] После начала движения накатом, на этапе ST17, выполняется определение того, действительно или нет режим движения переключается из высокоскоростного режима в низкоскоростной режим. То есть, выполняется определение того, действительно или нет рабочее положение многопозиционного переключателя 301 переключения состояния привода, распознанное на основе выходного сигнала от датчика 302 положения шкалы, переключается из положения выбора высокоскоростного режима (положение Н-4WD или положение H-2WD на фиг. 1) в положение выбора низкоскоростного режима (положение L-4WD на фиг. 1).
[0115] Когда определение НЕТ выполняется на этапе ST17 без переключения режима движения в низкоскоростной режим, выполняется переход на этап ST9.
[0116] Когда режим движения переключается из высокоскоростного режима в низкоскоростной режим во время движения накатом, определение ДА выполняется на этапе ST17, и выполняется переход на этап ST10, на котором движение накатом заканчивается, как описано выше. Выбор низкоскоростного режима во время движения накатом выключает движение накатом и переводит автоматическое сцепление 2 из состояния выключения в состояние включения. Соответственно, когда движение накатом заканчивается путем переключения в низкоскоростной режим, водитель достигает запрашиваемых высоких ходовых характеристик на дороге с неровным покрытием (высокие ходовые характеристики на дороге с неровным покрытием от движения в низкоскоростном режиме).
[0117] Другие операции являются такими же, как и в первом варианте осуществления.
[0118] Посредством выполнения вышеуказанных операций, вышеупомянутая операция, которая приводит к определению ДА на этапе ST2 и определению ДА на этапе ST13, включена в работу блока предотвращения движения по инерции согласно изобретению и соответствует «управлению не выполнением движения по инерции, которое не выполняет движение по инерции даже при установке условия начала движения по инерции, когда исполнительный механизм для переключения режима изменяет режим движения на первый режим». Вышеуказанная операция, которая приводит в результате к завершению ДА на этапе ST17 и завершению движения накатом на этапе ST10, также включена в работу блока предотвращения движения по инерции согласно изобретению, и соответствует «управлению завершением движения по инерции, которое завершает движение по инерции, когда исполнительный механизм для переключения режима используется для выбора первого режима, имеющего более высокие ходовые характеристики, чем второй режим во время движения по инерции, выполняемый путем установки условия начала движения по инерции».
[0119] Как описано ранее, во втором варианте осуществления, когда многопозиционный переключатель переключения состояния привода (исполнительный механизм для переключения режима) 301 используется для выбора низкоскоростного режима в качестве режима движения во время движения накатом, выполняемого путем установки условия начала движения накатом, движение накатом завершается (выключается), и автоматическое сцепление 2 переводится в состояние включения из состояния выключения. Когда многопозиционный переключатель 301 переключения состояния привода изменяет режим движения на низкоскоростной режим, движение накатом не начинается (не выполняется) даже при установке условия начала движения накатом, и поддерживается состояние включения автоматического сцепления 2.
[0120] Соответственно, движение накатом предотвращается во время движения в низкоскоростном режиме, и водитель может получить запрашиваемые высокие ходовые характеристики (высокие ходовые характеристики на дороге с неровным покрытием). Как следствие, можно получить более предпочтительные ходовые качества, чем в известном уровне техники (выполнение движения по инерции путем установки условия начала движения по инерции даже в режиме движения, имеющего высокие ходовые характеристики).
[0121] В частности, когда водитель выбирает низкоскоростной режим, водитель с большой вероятностью запросит движение на низкой скорости с приоритетом на рулевое управление. В этом случае, когда выполняется движение накатом, скорость транспортного средства становится нестабильной, и водитель может не фокусироваться на рулевом управлении. Второй вариант осуществления предотвращает движение накатом во время движения в низкоскоростном режиме, и, таким образом, может стабилизировать скорость транспортного средства, и водитель может сосредоточиться на рулевом управлении.
Третий вариант осуществления
[0122] Далее на основе чертежей будет описан третий вариант осуществления изобретения. Третий вариант осуществления предотвращает движение накатом, когда в транспортном средстве выбран режим с повышенной мощностью, обеспечивающий выбор эконимичного режима, обычного режима, а также режима с повышенной мощностью в качестве режима движения. Другие конфигурации и операции являются такими же, что и в первом варианте осуществления. Отличия от первого варианта осуществления будут описаны ниже.
[0123] Экономичный режим, обычный режим, и режим с повышенной мощностью являются режимами движения, имеющими различные запрошенные крутящие моменты двигателя 1 для величины работы акселератора (величины нажатия на педаль 51 акселератора).
[0124] В частности, как проиллюстрировано на фиг. 7 (блок-схеме, иллюстрирующей конфигурацию системы управления, относящуюся к ЭБУ 100 двигателя и ЭБУ 200 сцепления в третьем варианте осуществления), переключатель 105 выбора режима соединен с входным интерфейсом ЭБУ 100 двигателя. Переключатель 105 выбора режима представляет собой исполнительный механизм для переключения режима, с помощью которого режим движения переключается между экономичным режимом, обычным режимом, и режимом с повышенной мощностью, и представляет собой кнопочный переключатель, многопозиционный переключатель, или т.п. Командный сигнал режима, который соответствует режиму движения, выбранному путем использования переключателя 105 выбора режима, передается на ЭБУ 100 двигателя. Соответственно, запрошенный крутящий момент, соответствующий величине работы акселератора, изменяется в соответствии с выбранным режимом движения.
[0125] Фиг. 8 представляет собой схему, иллюстрирующую пример зависимости между величиной работы акселератора и запрошенным крутящим моментом для каждого выбранного режима движения. Сплошной линией на фиг. 8 проиллюстрирована зависимость между величиной работы акселератора и запрошенным крутящим моментом, когда выбран обычный режим. Прерывистой линией проиллюстрирована зависимость между величиной работы акселератора и запрошенным крутящим моментом, когда выбран режим с повышенной мощностью. Пунктирной линией проиллюстрирована зависимость между величиной работы акселератора и запрошенным крутящим моментом, когда выбран экономичный режим. Как понятно из фиг. 8, даже при одинаковой величине работы акселератора, установленный запрошенный крутящий момент при выборе режима с повышенной мощностью больше, чем при выборе обычного режима. И наоборот, установленный запрошенный крутящий момент при выборе экономичного режима меньше, чем при выборе обычного режима. Таким образом, режим с повышенной мощностью представляет собой режим движения, который определяет в качестве приоритета выходную мощность двигателя 1 большую по сравнению с экономичным режимом. Экономичный режим представляет собой режим движения, который определяет в качестве приоритета энергоэффективность (уровень расхода топлива) двигателя 1 большую по сравнению с режимом с повышенной мощностью.
[0126] Особый способ получения запрошенного крутящего момента, соответствующего режиму движения, проиллюстрирован, например, на основе фиг. 8, обеспечивающий получение коэффициентов коррекции запрошенного крутящего момента во время выбора режима с повышенной мощностью и во время выбора экономичного режима по отношению ко времени выбора обычного режима (когда коэффициент коррекции во время выбора обычного режима установлен на «единицу», коэффициент коррекции во время выбора режима с повышенной мощностью имеет величину больше «единицы», а коэффициент коррекции во время выбора экономичного режима имеет величину от «нуля» до «единицы»), и запрошенный крутящий момент, полученный из карты установки запрошенного крутящего момента во время выбора обычного режима, умноженный на коэффициенты коррекции запрошенного крутящего момента, что позволяет получить запрошенный крутящий момент, соответствующий выбранному в настоящее время режиму движения.
[0127] В третьем варианте осуществления, когда переключатель 105 выбора режима используется для выбора режима с повышенной мощностью (первого режима согласно изобретению) в качестве режима движения во время движения накатом, выполняемого путем установки условия начала движения накатом, то есть, когда режим движения переключается из экономичного режима или обычного режима (второго режима согласно изобретению) в режим с повышенной мощностью, движение накатом заканчивается (выключается), и автоматическое сцепление 2 переводится в состояние включения из состояния выключения. Когда переключатель 105 выбора режима изменяет режим движения на режим с повышенной мощностью, движение накатом не начинается (не выполняется) даже с установкой условия начала движения накатом, и поддерживается состояние включения автоматического сцепления 2. Соответственно, движение накатом предотвращается во время движения в режиме с повышенной мощностью, и водитель может достичь запрашиваемых высоких ходовых характеристик (высоких характеристик реакции по отношению к управлению водителя (работы педали 51 акселератора)) и достичь предпочтительных ходовых качеств.
[0128] Управление движением накатом выполняется ЭБУ 200 сцепления. Таким образом, функциональная часть ЭБУ 200 сцепления, которая выполняет управление движением накатом, выполнена в качестве блока предотвращения движения по инерции согласно изобретению.
[0129] Фиг. 9 представляет собой блок-схему, иллюстрирующую процедуру управления движением накатом согласно третьему варианту осуществления. Операции этапов ST1, ST2, ST5, ST6, и ST9-ST11 на блок-схеме такие же, что и операции этапов ST1, ST2, ST5, ST6, и ST9-ST11 на блок-схеме, проиллюстрированной на фиг. 5 в первом варианте осуществления. Таким образом, операции этих этапов описаны не будут.
[0130] На блок-схеме на фиг. 9, когда определение ДА выполняется на этапе ST2 с установкой условия начала движения накатом, выполняется переход на этап ST23, на котором выполняется определение того, действительно или нет текущий режим движения представляет собой режим с повышенной мощностью. То есть, определение того, действительно или нет режим движения представляет собой режим с повышенной мощностью, выполняется на основе выходного сигнала от переключателя 105 выбора режима.
[0131] Когда текущий режим движения представляет собой режим с повышенной мощностью, определение ДА выполняется на этапе ST23, и выполняется возврат. То есть, выполняется возврат без начала движения накатом (с не выключенным автоматическим сцеплением 2). Даже когда в режиме с повышенной мощностью установлено условие начала движения накатом, поддерживается состояние включения автоматического сцепления 2, и движение накатом не начинается. Соответственно, во время движения в режиме с повышенной мощностью предотвращается движение накатом, и водитель может достичь запрашиваемые высокие характеристики реакции и достичь предпочтительных ходовых качеств.
[0132] В то время как режим с повышенной мощностью продолжается, операции этапа ST1 (определение НЕТ на этапе ST1), этапа ST2 (определение ДА на этапе ST2), и этапа ST23 (определение ДА на этапе ST23) повторяются даже с установкой условия начала движения накатом.
[0133] Когда режим движения во время установки условия начала движения накатом представляет собой не режим с повышенной мощностью (экономичный режим или обычный режим), определение НЕТ выполняется на этапе ST23, и выполняется переход на этап ST5, на котором начинается движение накатом, как описано выше.
[0134] После начала движения накатом, на этапе ST27, выполняется определение того, действительно или нет режим движения переключается в режим с повышенной мощностью из режима с не повышенной мощностью. То есть, определение того, действительно или нет режим движения переключается из режима с не повышенной мощностью в режим с повышенной мощностью, выполняется на основе выходного сигнала от переключателя 105 выбора режима.
[0135] Когда определение НЕТ выполняется на этапе ST27 без переключения режима движения в режим с повышенной мощностью, выполняется переход на этап ST9.
[0136] Когда режим движения переключается из режима с не повышенной мощностью в режим с повышенной мощностью во время движения накатом, определение ДА выполняется на этапе ST27, и выполняется переход на этап ST10, на котором движение накатом заканчивается, как описано выше. Выбор режима мощности во время движения накатом выключает движение накатом и переводит автоматическое сцепление 2 из состояния выключения в состояние включения. Соответственно, когда движение накатом заканчивается путем переключения в режим с повышенной мощностью, водитель получает запрашиваемые высокие характеристики реакции (высокие характеристики реакции от движения в режиме с повышенной мощностью).
[0137] Другие операции являются такими же, как и в первом варианте осуществления.
[0138] Посредством выполнения вышеуказанных операций, вышеупомянутая операция, которая приводит к определению ДА на этапе ST2 и определению ДА на этапе ST23, включена в состав работы блока предотвращения движения по инерции согласно изобретению, и соответствует «управлению не выполнением движения по инерции, которое не выполняет движение по инерции, даже с установкой условия начала движения по инерции, когда исполнительный механизм для переключения режима изменяет режим движения на первый режим». Вышеуказанная операция, которая приводит к завершению ДА на этапе ST27 и завершению движения накатом на этапе ST10, также включена в состав работы блока предотвращения движения по инерции согласно изобретению, и соответствует «управлению завершением движения по инерции, в котором завершается движение по инерции, когда исполнительный механизм для переключения режима используется для выбора первого режима, имеющего более высокие ходовые характеристики, чем второй режим во время движения по инерции, выполняемый путем установки условия начала движения по инерции».
[0139] Как описано ранее, в третьем варианте осуществления, когда переключатель 105 выбора режима (исполнительный механизм для переключения режима) используется для выбора режима с повышенной мощностью в качестве режима движения во время движения накатом, выполняемого путем установки условия начала движения накатом, движение накатом завершается (выключается), и автоматическое сцепление 2 переводится в состояние включения из состояния выключения. Когда переключатель 105 выбора режима изменяет режим движения на режим с повышенной мощностью, движение накатом не начинается (не выполняется) даже с установкой условия начала движения накатом, и поддерживается состояние включения автоматического сцепления 2.
[0140] Соответственно, движение накатом предотвращается во время движения в режиме мощности, и водитель может получить запрошенные высокие ходовые характеристики (высокие характеристики реакции). Как следствие, можно получить более предпочтительные ходовые качества, чем в известном уровне техники (выполнение движения по инерции путем установки условия начала движения по инерции, даже в режиме движения, имеющем высокие ходовые характеристики).
[0141] В частности, когда водитель выбирает режим с повышенной мощностью, водитель запрашивает высокие характеристики реакции. В этом случае, когда выполняется движение накатом, характеристики повторного ускорения снижаются из-за потери приводной мощности. Третий вариант осуществления предотвращает движение накатом во время движения в режиме с повышенной мощностью, и, таким образом, не ведет к потере приводной мощности и обеспечивает предпочтительные характеристики повторного ускорения, и можно получить предпочтительные ходовые качества.
Четвертый вариант осуществления
[0142] Далее со ссылкой на чертежи будет описан четвертый вариант осуществления изобретения. Четвертый вариант осуществления предотвращает движение накатом, когда в транспортном средстве выбран режим ВЫКЛ остановки-запуска, обеспечивающий выбор режима ВКЛ остановки-запуска и режима ВЫКЛ остановки-запуска в качестве режима движения, другие конфигурации и операции являются такими же, что и в первом варианте осуществления. Отличия от первого варианта осуществления будут описаны далее.
[0143] Режим ВКЛ остановки-запуска представляет собой режим движения, в котором остановка транспортного средства останавливает двигатель 1. Режим ВЫКЛ остановки-запуска представляет собой режим движения, в котором остановка транспортного средства не останавливает двигатель 1.
[0144] В частности, как проиллюстрировано на фиг. 10 (блок-схеме, иллюстрирующей конфигурацию системы управления, относящейся к ЭБУ 100 двигателя и ЭБУ 200 сцепления в четвертом варианте осуществления), переключатель 106 переключения остановки-запуска соединен с входным интерфейсом ЭБУ 100 двигателя. Переключатель 106 переключения остановки-запуска представляет собой исполнительный механизм для переключения режима, с помощью которого режим движения переключается между режимом ВКЛ остановки-запуска и режимом ВЫКЛ остановки-запуска.
[0145] В четвертом варианте осуществления, когда переключатель 106 переключения остановки-запуска используется для выбора режима ВЫКЛ остановки-запуска (первого режима согласно изобретению) в качестве режима движения во время движения накатом, выполняемого путем установки условия начала движения накатом, то есть, когда режим движения переключается из режима ВКЛ остановки-запуска (второго режима согласно изобретению) в режим ВЫКЛ остановки-запуска, движение накатом заканчивается (выключается), и автоматическое сцепление 2 переводится в состояние включения из состояния выключения. Когда переключатель 106 переключения остановки-запуска изменяет режим движения на режим ВЫКЛ остановки-запуска, движение накатом не начинается (не выполняется) даже с установкой условия начала движения накатом, и поддерживается состояние включения автоматического сцепления 2.
[0146] Когда выбран режим ВЫКЛ остановки-запуска, водитель запрашивает транспортное средство продемонстрировать высокие характеристики реакции ускорения. В этом случае, водитель, как считается, запросит высокие характеристики реакции по отношению к управлению во время движения. Соответственно, движение накатом предотвращается во время движения в режиме ВЫКЛ остановки-запуска, и водитель может получить запрашиваемые высокие характеристики движения (высокие характеристики реакции по отношению к управлению водителя) и получить предпочтительные ходовые качества.
[0147] Управление движением накатом выполняется ЭБУ 200 сцепления. Таким образом, функциональная часть ЭБУ 2000 сцепления, которая выполняет управление движением накатом, выполнена в качестве блока предотвращения движения по инерции согласно изобретению.
[0148] Фиг. 11 представляет собой блок-схему, иллюстрирующую процедуру управления движением накатом согласно четвертому варианту осуществления. Операции этапов ST1, ST2, ST5, ST6, и ST9-ST11 на блок-схеме такие же, что и операции этапов ST1, ST2, ST5, ST6, и ST9-ST11 на блок-схеме, проиллюстрированной на фиг. 5 в первом варианте осуществления. Таким образом, операции этих этапов описаны не будут.
[0149] На блок-схеме на фиг. 11, когда определение ДА выполняется на этапе ST2 с установкой условия начала движения накатом, выполняется переход на этап ST33, на котором выполняется определение того, действительно или нет текущий режим движения представляет собой режим ВЫКЛ остановки-запуска. То есть, выполняется определение того, действительно или нет режим движения представляет собой режим ВЫКЛ остановки-запуска, на основе выходного сигнала от переключателя 106 переключения остановки-запуска.
[0150] Когда текущий режим движения представляет собой режим ВЫКЛ остановки-запуска, определение ДА выполняется на этапе ST33, и выполняется возврат. То есть, выполняется возврат без начала движения накатом (с не выключенным автоматическим сцеплением 2). Даже когда условие начала движения накатом устанавливается в режиме ВЫКЛ остановки-запуска, включенное состояние автоматического сцепления 2 поддерживается, и движение накатом не начинается. Соответственно, движение накатом предотвращается во время движения в режиме ВЫКЛ остановки-запуска, и водитель может получить запрашиваемые высокие характеристики реакции и получить предпочтительные ходовые качества.
[0151] В то время как режим ВЫКЛ остановки-запуска продолжается, операции этапа ST1 (определение НЕТ на этапе ST1), этапа ST2 (определение ДА на этапе ST2), и этапа ST33 (определение ДА на этапе ST33) повторяются даже с установкой условия начала движения накатом.
[0152] Когда режим движения во время установки условия начала движения накатом представляет собой режим ВКЛ остановки-запуска, определение НЕТ выполняется на этапе ST33, и выполняется переход на этап ST5, на котором движение накатом начинается, как описано выше.
[0153] После начала движения накатом, на этапе ST37, выполняется определение того, действительно или нет режим движения переключается из режима ВКЛ остановки-запуска в режим ВЫКЛ остановки-запуска. То есть, определение того, действительно или нет режим движения переключается из режима ВКЛ остановки-запуска в режим ВЫКЛ остановки-запуска, выполняется на основе выходного сигнала от переключателя 106 переключения остановки-запуска.
[0154] Когда определение НЕТ выполняется на этапе ST37 без переключения режима движения в режим ВЫКЛ остановки-запуска, выполняется переход на этап ST9.
[0155] Когда режим движения переключается из режима ВКЛ остановки-запуска в режим ВЫКЛ остановки-запуска во время движения накатом, определение ДА выполняется на этапе ST37, и выполняется переход на этап ST10, на котором движение накатом завершается, как описано выше. Выбор режима ВЫКЛ остановки-запуска во время движения накатом выключает движение накатом и переводит автоматическое сцепление 2 из выключенного состояния во включенное состояние. Соответственно, когда движение накатом завершается путем переключения в режим ВЫКЛ остановки-запуска, водитель получает запрашиваемые высокие характеристики реакции.
[0156] Другие операции являются такими же, как и в первом варианте осуществления.
[0157] Посредством выполнения вышеуказанных операций, вышеупомянутая операция, которая приводит к определению ДА на этапе ST2 и определению ДА на этапе ST33, включена в работу блока предотвращения движения по инерции согласно изобретению, и соответствует «управлению не выполнением движения по инерции, которое не выполняет движение по инерции даже с установкой условия начала движения по инерции, когда исполнительный механизм для переключения режима изменяет режим движения на первый режим». Вышеуказанная операция, которая приводит к окончанию ДА на этапе ST37 и окончанию движения накатом на этапе ST10, также включена в работу блока предотвращения движения по инерции согласно изобретению, и соответствует «управлению завершением движения по инерции, которое завершает движение по инерции, когда исполнительный механизм для переключения режима используется для выбора первого режима, имеющего более высокие ходовые характеристики, чем второй режим во время движения по инерции, выполняемого путем установки условия начала движения по инерции».
[0158] Как описано ранее, в четвертом варианте осуществления, когда переключатель 106 переключения остановки-запуска (исполнительный механизм для переключения режима) используется для выбора режима ВЫКЛ остановки-запуска в качестве режима движения во время движения накатом, выполняемого путем установки условия начала движения накатом, движение накатом завершается (выключается), и автоматическое сцепление 2 переводится во включенное состояние из выключенного состояния. Когда переключатель 106 переключения остановки-запуска изменяет режим движения на режим ВЫКЛ остановки-запуска, движение накатом не начинается (не выполняется) даже с установкой условия начала движения накатом, и поддерживается включенное состояние автоматического сцепления 2.
[0159] Соответственно, движение накатом предотвращается во время движения в режиме ВЫКЛ остановки-запуска, и водитель может получить запрашиваемые высокие ходовые характеристики (высокие характеристики реакции). Как следствие, можно получить более предпочтительные ходовые качества, чем в известном уровне техники (выполнение движения по инерции путем установки условия начала движения по инерции даже в режиме движения, имеющем высокие характеристики движения).
[0160] В частности, как описано выше, когда водитель выбирает режим ВЫКЛ остановки-запуска, водитель запрашивает транспортное средство продемонстрировать высокие характеристики реакции ускорения. В этом случае, водитель, как считается, запросит высокие характеристики реакции по отношению к управлению во время движения. Таким образом, запрашиваемые водителем высокие характеристики реакции можно обеспечить путем предотвращения движения накатом, когда выбран режим ВЫКЛ остановки-запуска. Как следствие, можно получить предпочтительные ходовые качества.
Другие варианты осуществления
[0161] Изобретение не ограничено каждым из вариантов осуществления. Все модификации или применения, которые соответствуют формуле изобретения и эквивалентному объему, могут быть выполнены.
[0162] Например, в то время как каждый из вариантов осуществления описывает случай применения изобретения на автомобиле с приводом на четыре колеса, имеющем в основе заднеприводное (FR) транспортное средство с передним расположением двигателя, изобретение может применяться на автомобиле с приводом на четыре колеса в течение части времени, имеющем в основе переднеприводное (FF) транспортное средство с передним расположением двигателя, или на автомобиле с приводом на четыре колеса в течение всего времени использования. Третий вариант осуществления и четвертый вариант осуществления не ограничиваются автомобилем с приводом на четыре колеса и могут применяться на транспортном средстве с приводом на два колеса в течение всего времени использования. Технология предотвращения движения накатом во время движения в режиме ВКЛ блокировки дифференциала может применяться к транспортному средству с приводом на два колеса в течение всего времени использования.
[0163] В то время как каждый из вариантов осуществления иллюстрирует устройство 3 переключения, как имеющее шесть ступеней передних передач, изобретение этим не ограничивается, и может быть установлено любое число ступеней передач. Изобретение может применяться на транспортном средстве, которое оснащено автоматической коробкой передач в качестве устройства 3 переключения. В этом случае, элемент фрикционного зацепления, который меняет передаточное отношение автоматического устройства переключения, соответствует блоку соединения и разъединения согласно изобретению. То есть, при движении накатом, передача мощности между двигателем и приводными колесами блокируется путем выключения элемента фрикционного зацепления.
[0164] Каждый из вариантов осуществления описывает случай использования бензинового двигателя 1 в качестве двигателя внутреннего сгорания. Изобретение этим не ограничивается, и могут быть использованы другие двигатели внутреннего сгорания, например, дизельный двигатель. В вариантах осуществления с первого по третий, транспортное средство, которое содержит двигатель внутреннего сгорания в качестве источника приводного усилия (обычное транспортное средство) может быть заменено транспортным средством, содержащим двигатель внутреннего сгорания и электрический двигатель, или электрическим автомобилем, содержащим электрический двигатель.
[0165] Каждый из вариантов осуществления описывает транспортное средство, который обеспечивает выполнение как управления завершением движения по инерции, так и управление не выполнением движения по инерции. Изобретение этим не ограничивается. Устройство управления для транспортного средства, которое обеспечивает выполнение либо управления завершением движения по инерции, либо управление не выполнением движения по инерции, входит в техническую идею изобретения.
[0166] Каждый из вариантов осуществления описывает автоматическое сцепление 2, которое управляется КРЦ 22. Изобретение этим не ограничивается и может применяться на известном устройстве сцепления с вилкой выключения, которое передвигает подшипник выключения посредством вилки выключения.
[0167] Каждый из вариантов осуществления останавливает двигатель 1 во время движения накатом. Изобретение этим не ограничивается и может приводить в действие двигатель 1 (приводить в действие приблизительно на скорости вращения холостого хода) во время движения накатом.
[0168] Первый вариант осуществления выполняет управление движением накатом в соответствии с состоянием ВКЛ блокировки дифференциала и состоянием ВЫКЛ блокировки дифференциала механизма 49 блокировки заднего устройства дифференциала, входящего в заднее устройство 44 дифференциала. Изобретение этим не ограничивается. Переднее устройство 43 дифференциала может содержать механизм блокировки переднего устройства дифференциала, и управление движением накатом может выполняться в соответствии с состоянием ВКЛ блокировки дифференциала и состоянием ВЫКЛ блокировки дифференциала механизма блокировки переднего устройства дифференциала (движение накатом предотвращается в состоянии ВКЛ блокировки переднего устройства дифференциала). В качестве альтернативного варианта, механизм блокировки центрального устройства дифференциала в автомобиле с приводом на четыре колеса в течение всего времени использования, может содержать механизм блокировки центрального устройства дифференциала, и управление движением накатом может выполняться в соответствии с состоянием ВКЛ блокировки дифференциала и состоянием ВЫКЛ блокировки дифференциала механизма блокировки центрального устройства дифференциала (движение накатом предотвращается в состоянии ВКЛ блокировки центрального устройства дифференциала).
[0169] Изобретение может применяться для управления транспортным средством, которое обеспечивает движение накатом путем выключения автоматического сцепления.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2011 |
|
RU2561658C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2624481C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ | 2017 |
|
RU2667797C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПРЕДСТАВЛЕНИЯ СПОСОБА РАБОТЫ ТРАНСПОРТНОГО СРЕДСТВА, А ТАКЖЕ УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2008 |
|
RU2448008C2 |
| СПОСОБ ЗАПУСКА И ОСТАНОВКИ ДВИГАТЕЛЯ И СИСТЕМА ДВИГАТЕЛЯ | 2012 |
|
RU2606523C2 |
| УСТРОЙСТВО СЦЕПЛЕНИЯ ДЛЯ ВЗАИМНОГО ЗАЦЕПЛЕНИЯ | 2015 |
|
RU2601087C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2774335C1 |
| ЭЛЕКТРОННО-УПРАВЛЯЕМЫЙ БЛОКИРУЕМЫЙ ДИФФЕРЕНЦИАЛ С СИСТЕМОЙ УПРАВЛЕНИЯ | 2010 |
|
RU2547668C2 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2641405C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2522176C2 |
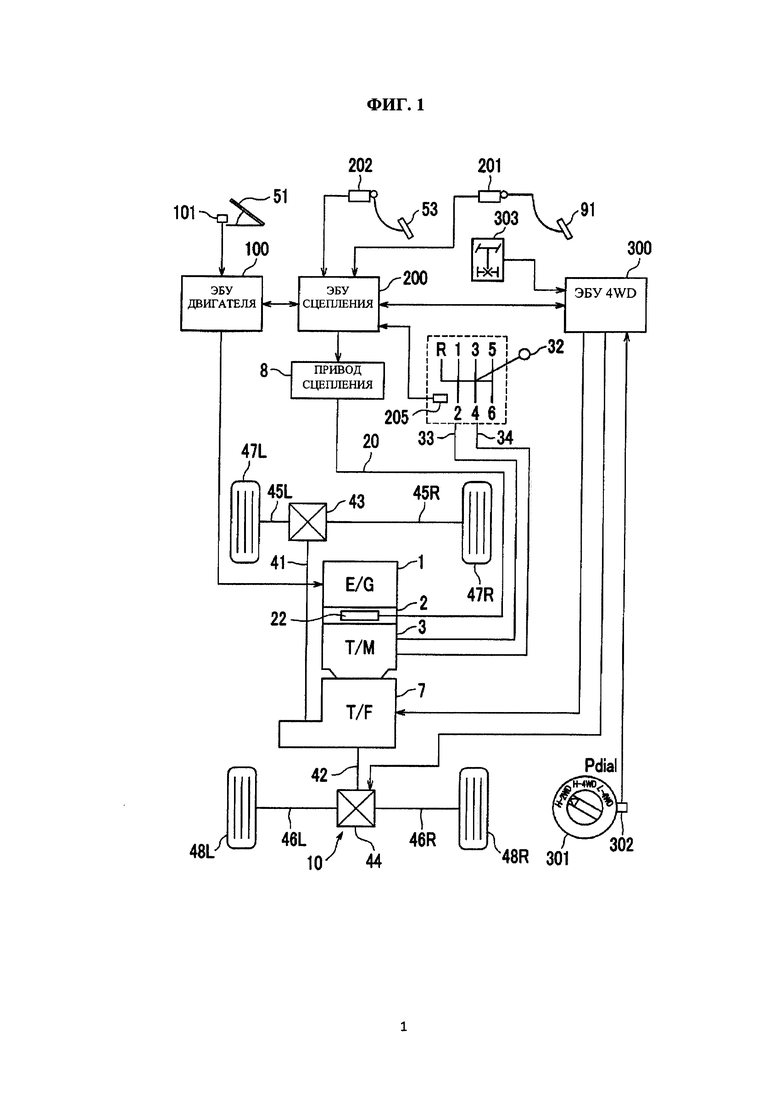

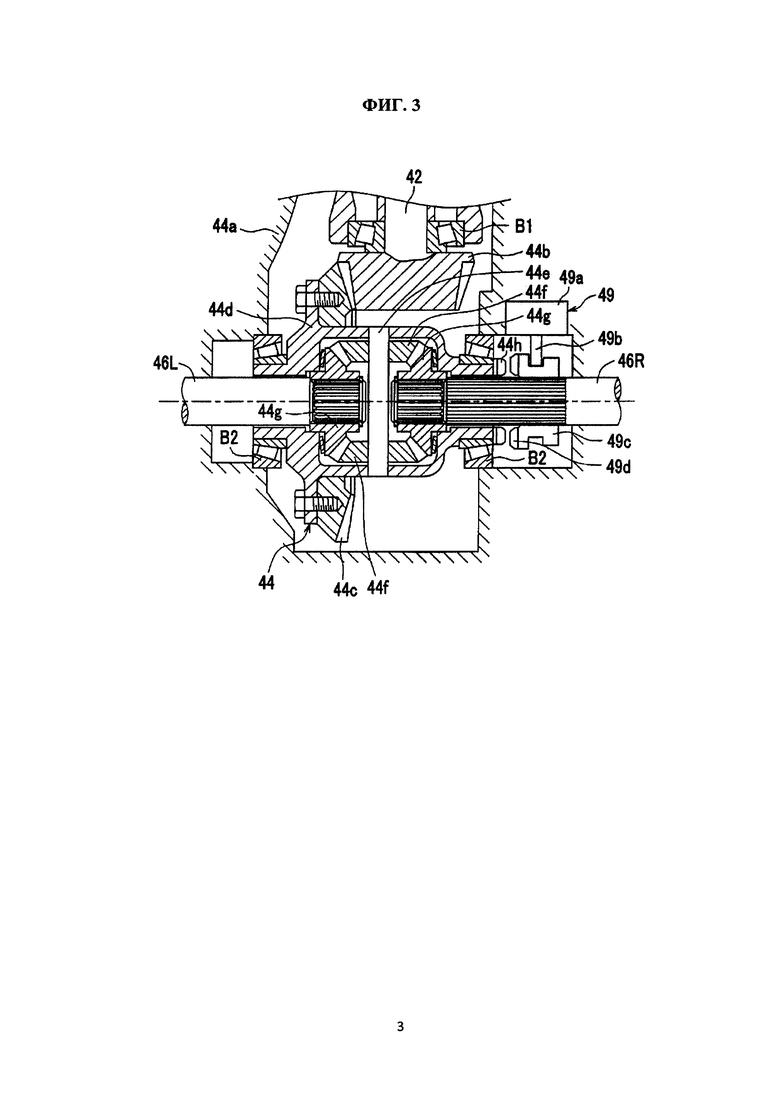
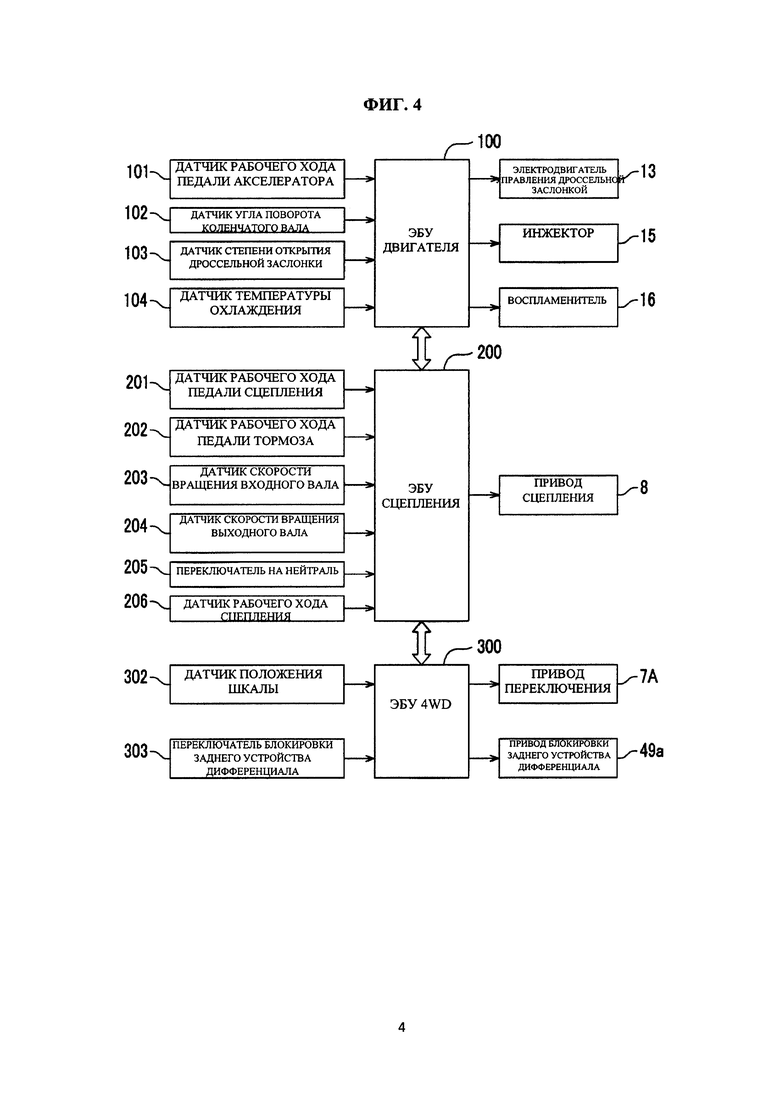
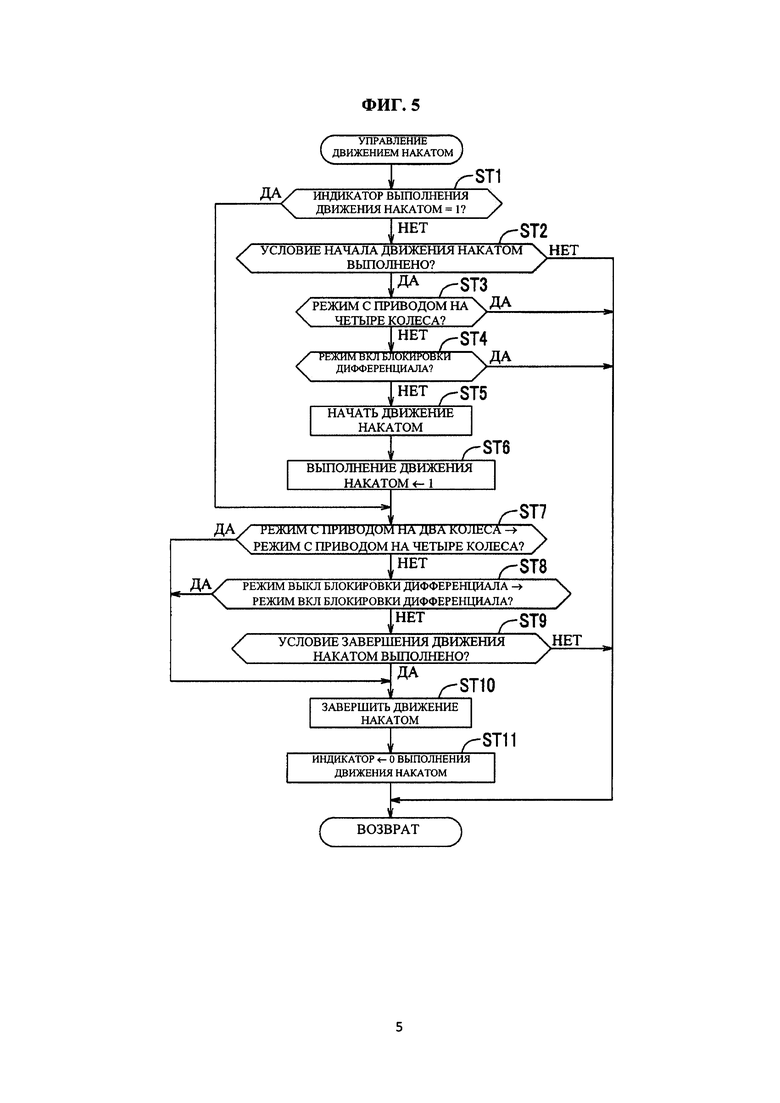
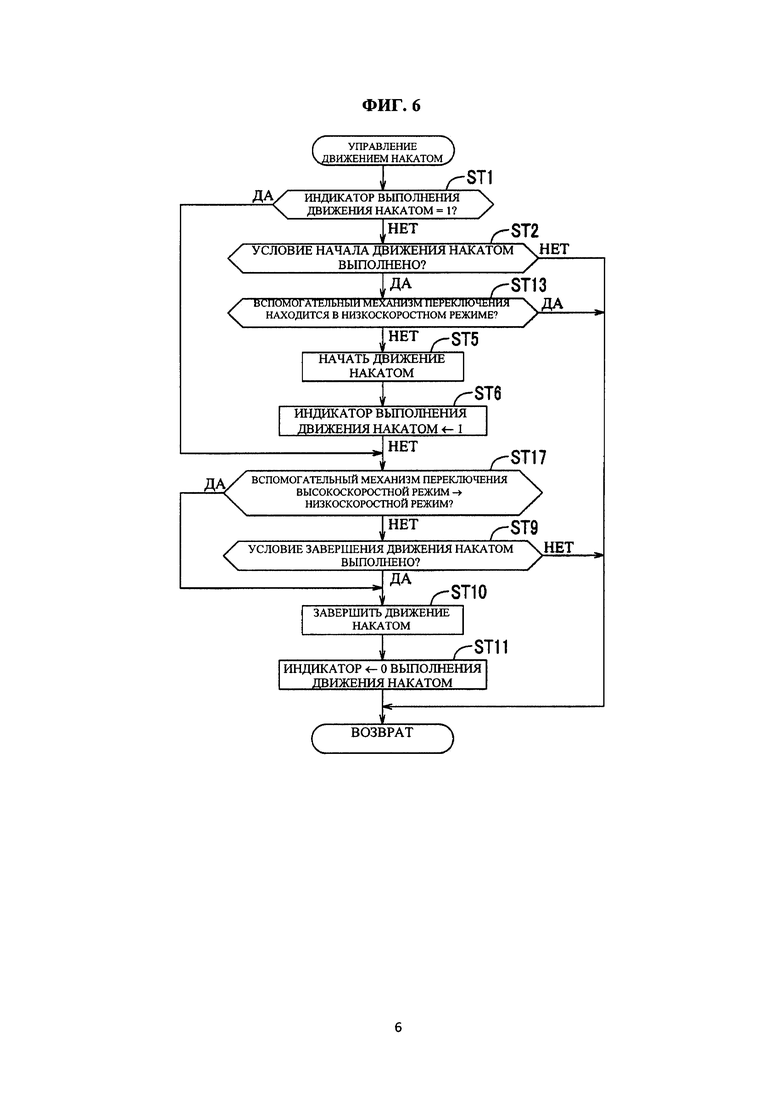
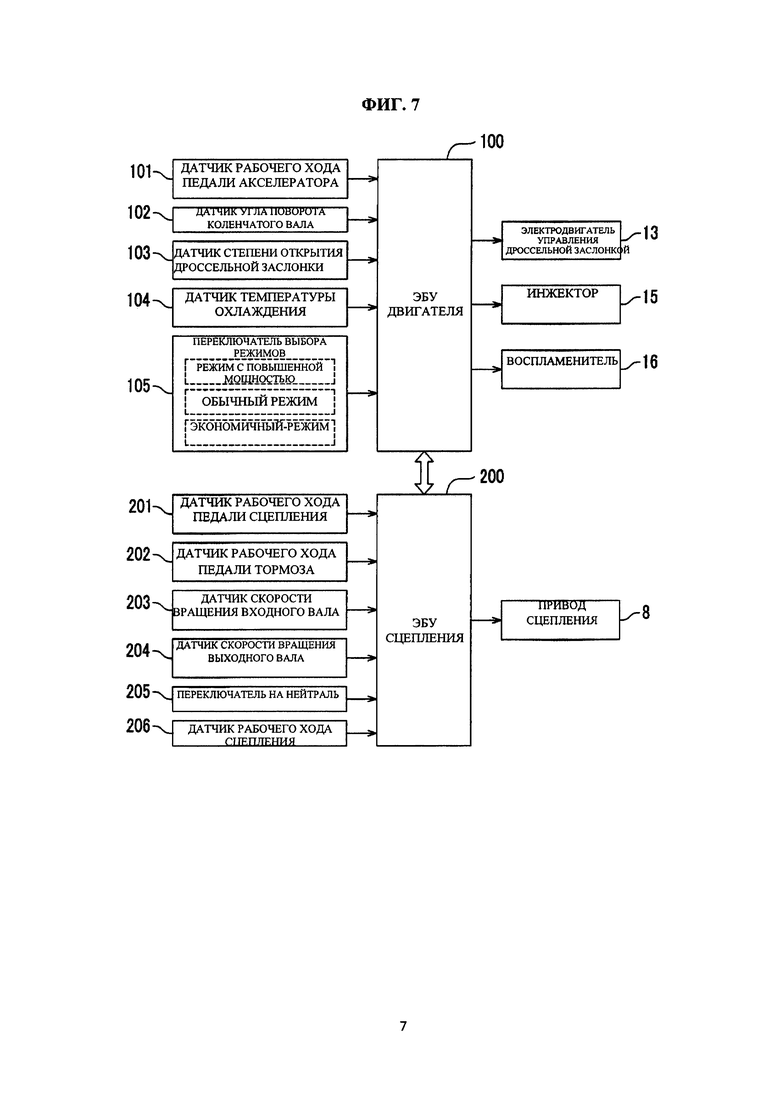
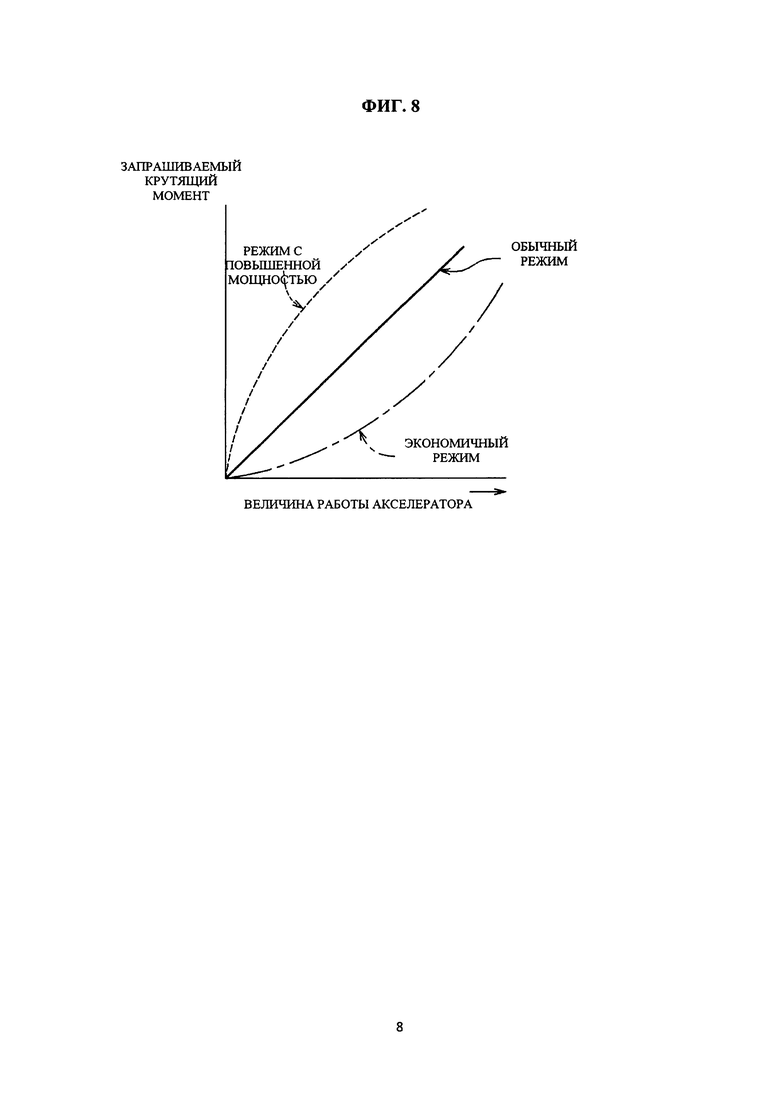
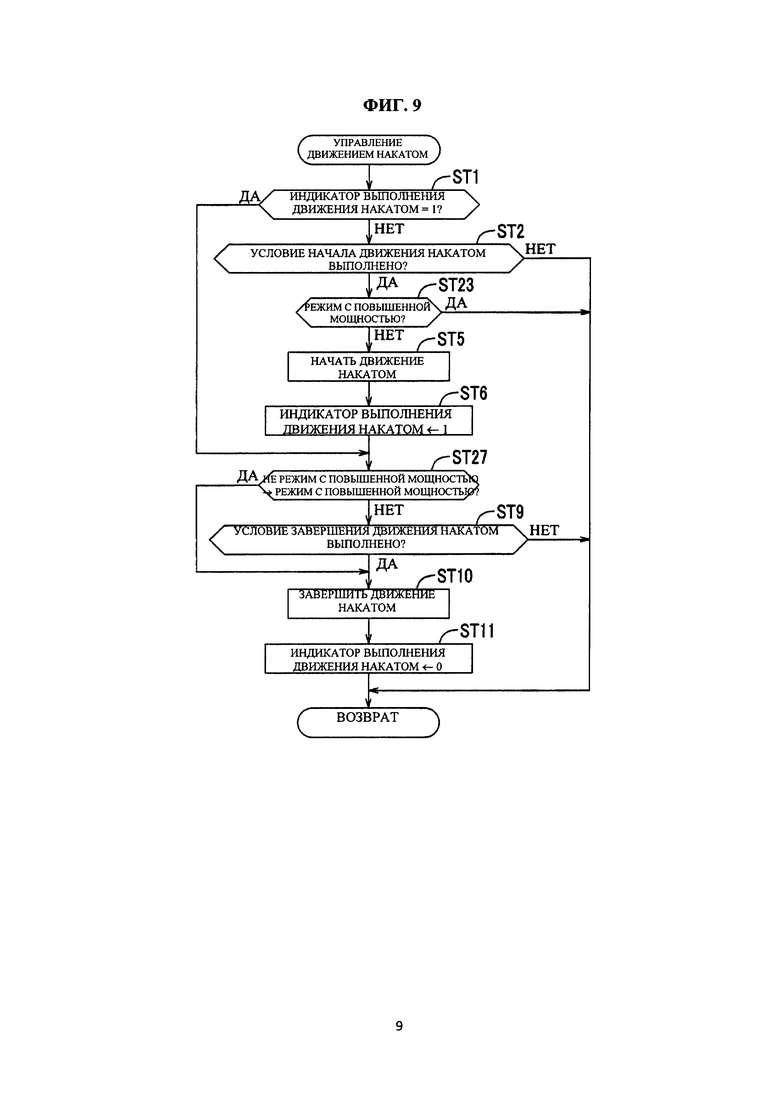
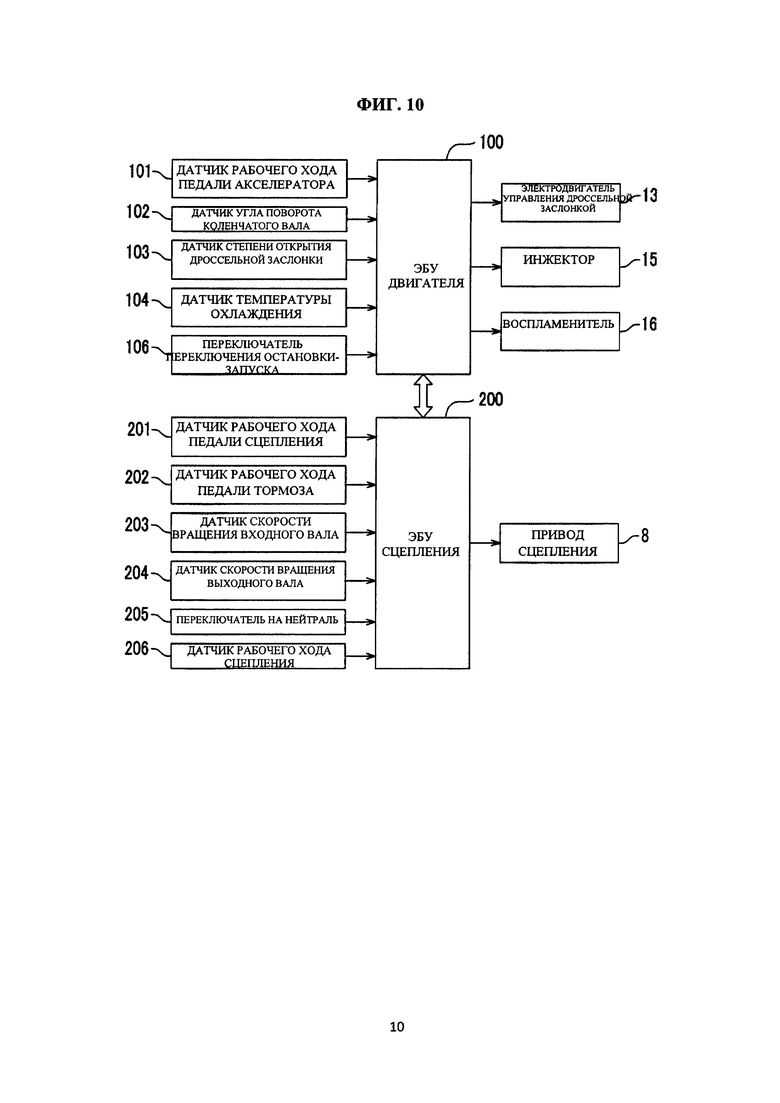
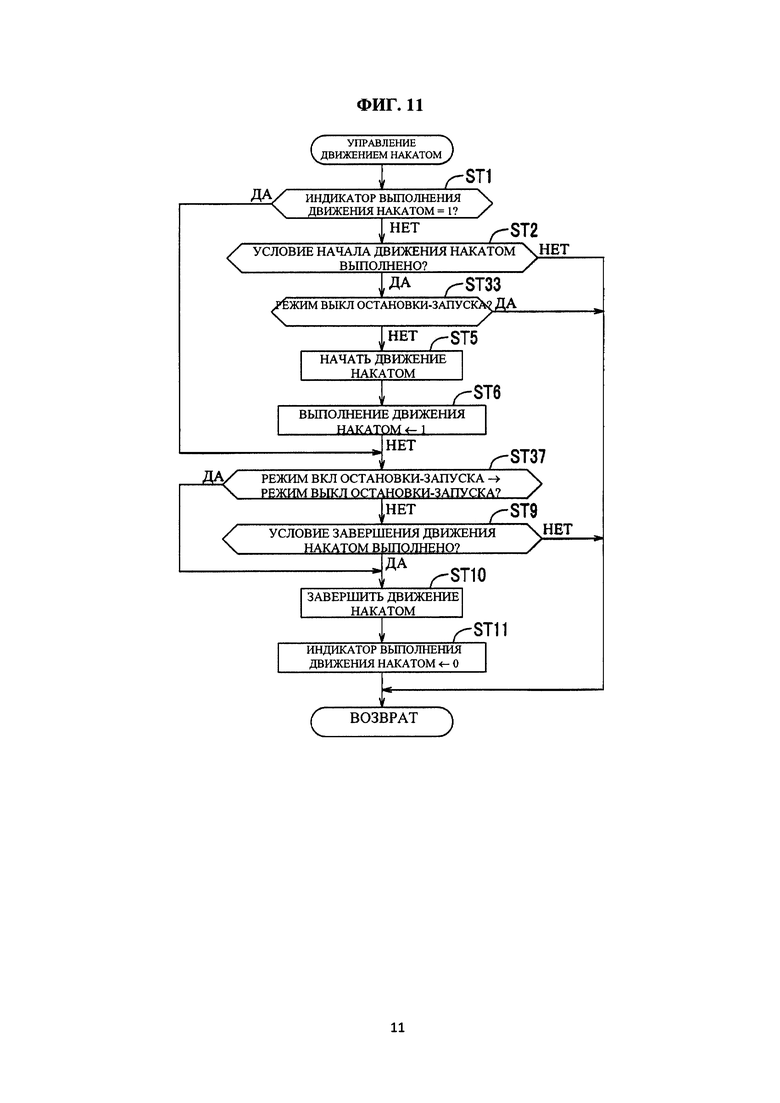
Изобретение относится к устройству управления для транспортного средства. Транспортное средство содержит блок соединения и разъединения, исполнительный механизм. Блок соединения и разъединения размещен в контуре передачи мощности между источником приводного усилия и ведущими колесами и выполнен с возможностью переключения между состоянием включения и состоянием выключения посредством воздействия приводов. Передача мощности в контуре передачи мощности выполняется в состоянии включения и блокируется в состоянии выключения. Исполнительный механизм управляется водителем и служит для переключения режимов движения. Исполнительный механизм служит для выбора одного режима движения из множества режимов движения. Режимы движения включают в себя первый и второй режимы. Режимы движения имеют различные уровни ходовых характеристик. Первый режим движения имеет более высокий уровень ходовых характеристик, чем второй режим. Устройство управления содержит электронный блок управления. Электронный блок управления выполнен с возможностью управления приводами для выполнения движения по инерции. Блок соединения и разъединения переводится в состояние выключения, когда устанавливается заранее заданное условие начала движения по инерции. Блок соединения и разъединения также осуществляет либо управление завершением движения по инерции, либо управление невыполнением движения по инерции. Управление завершением движения по инерции завершает движение по инерции, когда исполнительный механизм для переключения режима используется для выбора первого режима. Достигается получение предпочтительных ходовых характеристик. 5 н.п. ф-лы, 11 ил.
1. Устройство управления для транспортного средства, при этом транспортное средство содержит блок соединения и разъединения, размещенный в контуре передачи мощности между источником приводного усилия и ведущими колесами, причем блок соединения и разъединения выполнен с возможностью переключения между состоянием включения и состоянием выключения посредством воздействия приводов, притом передача мощности в контуре передачи мощности выполняется в состоянии включения, при этом передача мощности в контуре передачи мощности блокируется в состоянии выключения, причем транспортное средство содержит исполнительный механизм для переключения режима, который управляется водителем, притом исполнительный механизм для переключения режима выполнен с возможностью выбора одного режима движения из множества режимов движения, включающих в себя первый режим и второй режим, имеющих различные уровни ходовых характеристик, при этом устройство управления содержит:
электронный блок управления, выполненный с возможностью:
управления приводами для выполнения движения по инерции, при котором блок соединения и разъединения переводится в состояние выключения, когда устанавливается заранее заданное условие начала движения по инерции, и
осуществления, по меньшей мере, либо управления завершением движения по инерции, либо управления невыполнением движения по инерции, при этом управление завершением движения по инерции завершает движение по инерции, когда исполнительный механизм для переключения режима используется для выбора первого режима, имеющего более высокие ходовые характеристики, чем второй режим, во время движения по инерции, выполняемого путем установки условия начала движения по инерции, а управление невыполнением движения по инерции не выполняет движение по инерции, когда условие начала движения по инерции устанавливается после того, как исполнительный механизм для переключения режима изменяет режим движения на первый режим.
2. Устройство управления по п. 1, в котором:
транспортное средство содержит механизм переключения ведущих колес, размещенный в контуре передачи мощности, при этом механизм переключения ведущих колес выполнен с возможностью переключения между движением с приводом на четыре колеса и движением с приводом на два колеса; и
режимы движения включают в себя режим привода на четыре колеса, обеспечивающий движение с приводом на четыре колеса, и режим привода на два колеса, обеспечивающий движение с приводом на два колеса, при этом первый режим представляет собой режим привода на четыре колеса, а второй режим представляет собой режим привода на два колеса.
3. Устройство управления по п. 1, в котором:
транспортное средство содержит вспомогательный механизм переключения, размещенный в контуре передачи мощности транспортного средства, вспомогательный механизм переключения выполнен с возможностью переключения на две ступени, на низкоскоростную ступень и высокоскоростную ступень, с тем, чтобы изменять передаточное отношение вращения, передаваемое от источника приводного усилия на ведущие колеса; и
режимы движения включают в себя низкоскоростной режим, переводящий вспомогательный механизм переключения на низкоскоростную ступень, и высокоскоростной режим, переводящий вспомогательный механизм переключения на высокоскоростную ступень, при этом первый режим представляет собой низкоскоростной режим, а второй режим представляет собой высокоскоростной режим.
4. Устройство управления по п. 1, в котором:
транспортное средство содержит устройство дифференциала, размещенное в контуре передачи мощности, при этом устройство дифференциала включает в себя механизм блокировки дифференциала; и
режимы движения включают в себя режим включения (ВКЛ) блокировки дифференциала для блокировки механизма блокировки дифференциала устройства дифференциала и режим выключения (ВЫКЛ) блокировки дифференциала для разблокировки механизма блокировки дифференциала устройства дифференциала, причем первый режим представляет собой режим ВКЛ блокировки дифференциала, а второй режим представляет собой режим ВЫКЛ блокировки дифференциала.
5. Устройство управления по п. 1, в котором режимы движения включают в себя, по меньшей мере, режим с повышенной мощностью и экономичный режим, при этом первый режим представляет собой режим с повышенной мощностью, который определяет приоритетом выходную мощность источника приводного усилия большую, чем экономичный режим, а второй режим представляет собой экономичный режим, который определяет приоритетом энергоэффективность источника приводного усилия большую, чем режим с повышенной мощностью.
6. Устройство управления по п. 1, в котором:
источник приводного усилия представляет собой двигатель внутреннего сгорания и
режимы движения включают в себя режим ВКЛ остановки-запуска с остановкой двигателя внутреннего сгорания при остановке транспортного средства и режим ВЫКЛ остановки-запуска с отсутствием остановки двигателя внутреннего сгорания даже при остановке транспортного средства, при этом первый режим представляет собой режим ВЫКЛ остановки-запуска, а второй режим представляет собой режим ВКЛ остановки-запуска.
| EP 2939895 A1, 04.11.2015 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

