Область техники, к которой относится изобретение
[0001] Настоящее изобретение, в общем, относится к системам уборки урожая. Более конкретно, настоящее изобретение относится к системам уборки урожая, задействующим уборочную машину и накопительное устройство для накапливания урожая. Более конкретно, изобретение относится к такой системе, в которой предусмотрена система выгрузки с изменяющейся скоростью для размещения убираемого материала в заданном месте (местах).
Уровень техники
[0001] Для того, чтобы размещать убираемый материал в виде тюков из накопительного устройства на поле, обычно накопительное устройство останавливают и убираемый материал выгружают на поле в произвольной последовательности. Если тюки падают на ходу, тюки имеют тенденцию катиться и могут даже скатываться с холма. Оператору впоследствии приходится ездить по всему полю, чтобы собирать и перемещать тюки в итоговое место хранения.
Раскрытие изобретение
[0002] В одном варианте осуществления предложена система регулирования скорости убранного урожая при его выгрузке на поле из накопительного устройства для урожая. Система содержит разгрузочный механизм для придания убранному урожаю требуемой скорости движения назад при его выгрузке из накопительного устройства для урожая. Система также содержит устройство измерения скорости для измерения скорости движения вперед накопительного устройства для урожая. Процессор находится в сообщении с разгрузочным механизмом и устройством измерения скорости. Процессор выполнен с возможностью регулирования разгрузочного механизма для придания требуемой скорости движения назад или скорости движения вперед накопительного устройства для урожая для выгрузки убранного урожая со скоростью движения назад, которая по существу равна скорости движения вперед, так что при контакте убранного урожая с землей он имеет по существу нулевую скорость относительно земли.
[0003] В еще одном варианте осуществления предложена система регулирования скорости убранного урожая при его выгрузке на поле из накопительного устройства для урожая. Система содержит разгрузочный механизм для придания убранному урожаю скорости движения назад при его выгрузке из накопительного устройства для урожая. Система также содержит устройство измерения скорости для измерения скорости движения вперед накопительного устройства для урожая. Система подает оператору сигнал регулирования разгрузочного механизма для придания скорости движения назад или скорости движения вперед накопительного устройства для урожая для выгрузки убранного урожая со скоростью движения назад, которая пропорциональна скорости движения вперед или по существу равна скорости движения вперед, так что при контакте убранного урожая с землей он имеет по существу нулевую скорость относительно земли.
[0004] В еще одном варианте осуществления предложена система регулирования скорости убранного урожая при его выгрузке на поле из накопительного устройства для урожая. Система содержит разгрузочный механизм для придания убранному урожаю требуемой скорости движения назад при его выгрузке из накопительного устройства для урожая. Система содержит устройство измерения скорости для измерения скорости движения вперед накопительного устройства для урожая. Система содержит блок GPS, сконфигурированный по меньшей мере с одной виртуальной линией срабатывания. Процессор находится в сообщении с разгрузочным механизмом, устройством измерения скорости и блоком GPS. Процессор выполнен с возможностью регулирования по меньшей мере одного разгрузочного механизма для придания требуемой скорости движения назад и скорости движения вперед накопительного устройства для урожая для выгрузки убранного урожая со скоростью движения назад, которая является одной из: пропорциональной скорости движения вперед и по существу равной скорости движения вперед, так что убранный урожай входит в контакт с землей согласно по меньшей мере одному из следующего: на виртуальной линии срабатывания, смежно с виртуальной линией срабатывания, в зоне, образованной заданным расстоянием от виртуальной линии срабатывания, и за пределами зоны, образованной заданным расстоянием от виртуальной линии срабатывания.
[0005] Другие признаки и аспекты станут очевидны при рассмотрении подробного описания и сопровождающих чертежей.
Краткое описание чертежей
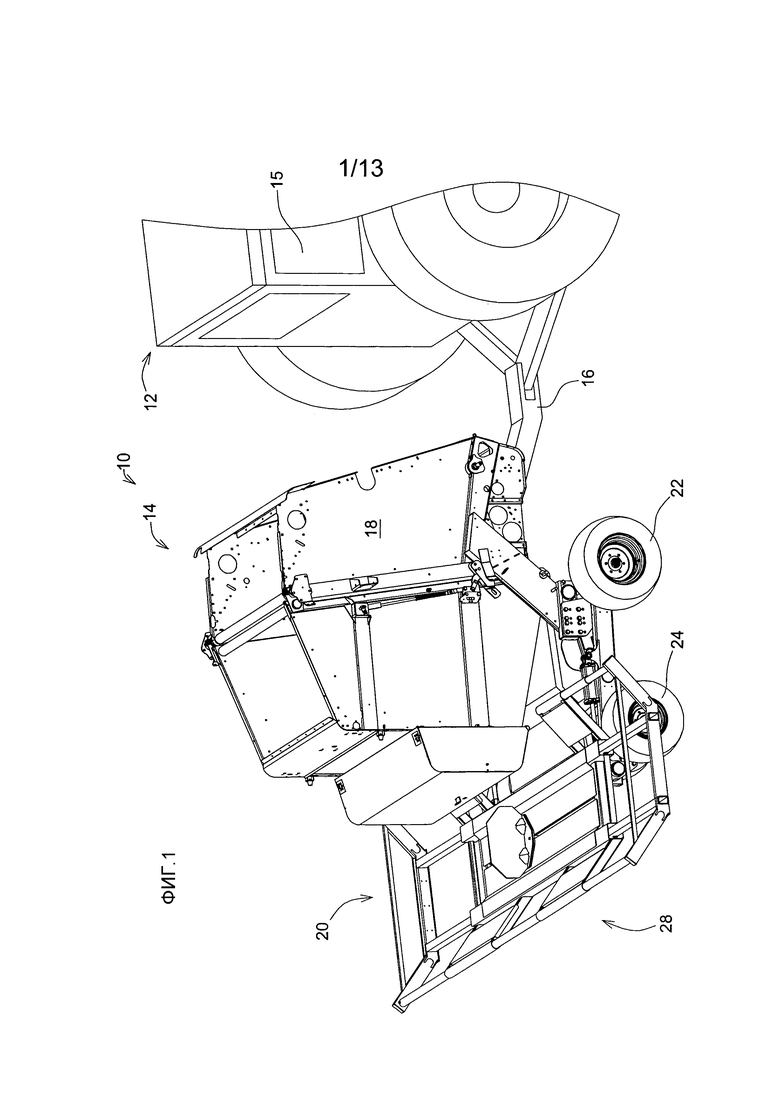
[0006] ФИГ.1 представляет собой вид в перспективе системы уборки урожая, содержащей один вариант осуществления системы регулирования скорости убранного урожая по мере его выгрузки.
[0007] ФИГ.2 представляет собой вид сбоку системы уборки урожая по ФИГ.1 с некоторыми удаленными частями.
[0008] ФИГ.3 представляет собой вид сзади системы уборки урожая по ФИГ.1.
[0009] ФИГ.4 представляет собой вид в перспективе сзади системы уборки урожая по ФИГ.1, показывающий выдвигающуюся секцию в режиме выдвижения.
[00010] ФИГ.5 представляет собой вид в перспективе системы уборки урожая по ФИГ.1.
[00011] ФИГ.6 представляет собой еще одно вид в перспективе системы уборки урожая по ФИГ.1, показывающее прессовальный механизм в открытом положении без тюка.
[00012] ФИГ.7 представляет собой еще одно вид в перспективе системы уборки урожая по ФИГ.1, показывающее передвигаемый тюк.
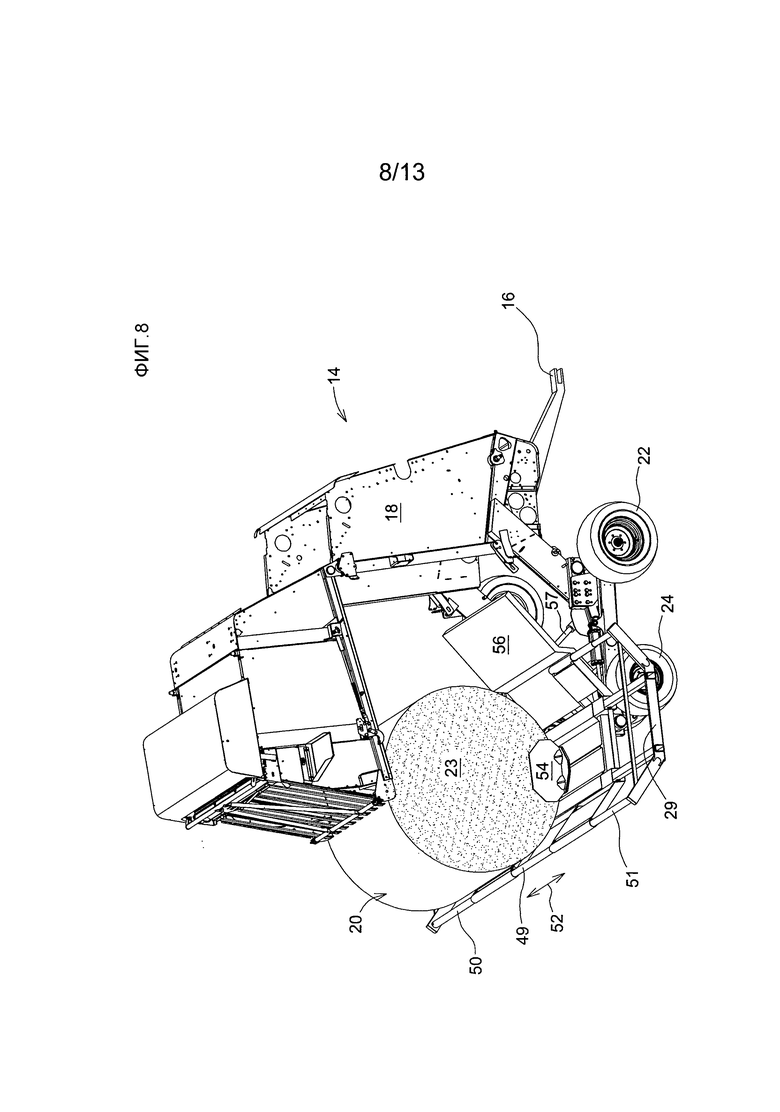
[00013] ФИГ.8 представляет собой еще одно вид в перспективе системы уборки урожая по ФИГ.1, показывающее передвигаемый дальше тюк.
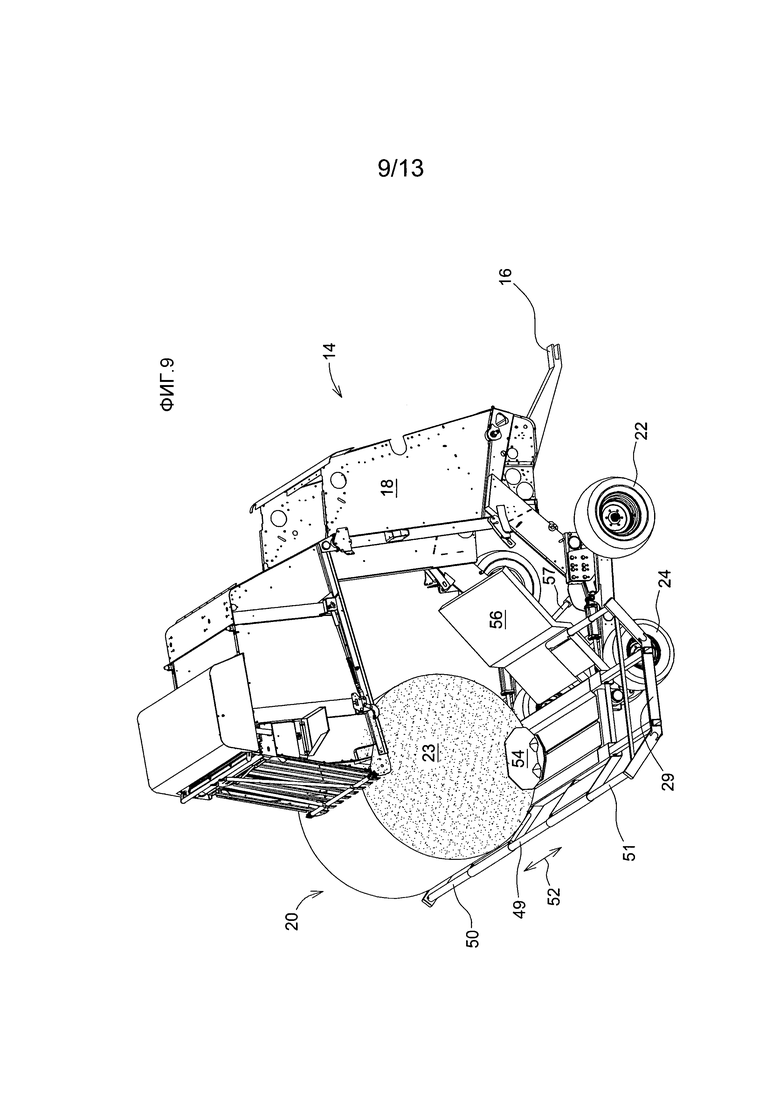
[00014] ФИГ.9 представляет собой еще одно вид в перспективе системы уборки урожая ФИГ.1, показывающее тюк, передвинутый полностью влево.
[00015] ФИГ.10 представляет собой частичное вид в перспективе механизма скольжения системы уборки урожая по ФИГ.1 с удаленным полом салазок тюка.
[00016] ФИГ.11 представляет собой частичное вид в перспективе снизу пресс-подборщика 1, показывающее часть механизма скольжения по ФИГ.10 с удаленным полом салазок тюка.
[00017] ФИГ.12 представляет собой частичный схематичный вид сбоку системы уборки урожая по ФИГ.1.
[00018] ФИГ.13 представляет собой частичное вид в перспективе накопительного устройства для урожая по ФИГ.1 с некоторыми удаленными частями.
[00019] Перед подробным объяснением каких-либо вариантов осуществления, следует понимать, что применение изобретения не ограничено деталями конструкции и расположения составных элементов, изложенными в следующем описании или проиллюстрированными на следующих чертежах. Изобретение допускает другие варианты осуществления и применения на практике или осуществление различными способами. Дополнительные варианты осуществления изобретения могут включать любую комбинацию признаков из одного или более зависимых пунктов формулы изобретения, и подобные признаки могут быть включены, совместно или по-отдельности, в любой независимый пункт.
Подробное описание изобретения
[0001] ФИГ.1 иллюстрирует тюковочную систему 10, содержащую трактор 12 и пресс-подборщик 14. Трактор содержит рабочее место 15 оператора. Пресс-подборщик 14 соединен с трактором 12 с помощью сцепки 16, обеспечивая, таким образом, буксирование для перемещения пресс-подборщика 14. Пресс-подборщик 14 содержит прессовальный механизм 18, накопительное устройство 20 для урожая и по меньшей мере одну соприкасающуюся с землей опору 22. Со ссылкой на ФИГ.2, прессовальный механизм 18 принимает убираемый материал по мере того, как тюковочная система 10 движется по земле и формирует из убираемого материала тюк 23.
[0002] Продолжая со ссылкой на ФИГ.2, накопительное устройство 20 для урожая содержит по меньшей мере одну соприкасающуюся с землей опору 24, элементы 26 конструкции и разгрузочный механизм 28. Разгрузочный механизм 28 показан в виде салазок 29 тюка. Соприкасающиеся с землей опоры 22, 24 могут быть в виде колес и осей, как проиллюстрировано, или в каком-то другом виде (например, гусеничной системы). Элементы 26 конструкции могут быть в виде балки и могут упоминаться, как конструкция качающейся балки. Прессовальный механизм 18 соединен с элементами 26 конструкции соединениями 30 пресс-подборщика, перенося посредством этого большую часть массы прессовального механизма 18 на элементы 26 конструкции. Элементы 26 конструкции соединены с соприкасающейся с землей опорой 22 с возможностью поворота вокруг оси 32 поворота. Соприкасающаяся с землей опора 24 соединена с элементами 26 конструкции с возможностью поворота вокруг оси 34 вращения. Показано соединение 30 пресс-подборщика, расположенное между осью 32 поворота и осью 34 вращения. Более конкретно, соединение 30 пресс-подборщика расположено в направлении 36 вперед от оси 34 вращения и в общем в направлении 38 назад от оси 32 поворота. В качестве альтернативы, соединение 30 пресс-подборщика может находиться на одной линии с, в общем на одной линии с, или вблизи оси 32 поворота. Соединение 30 пресс-подборщика представляет собой поворачивающееся соединение, хотя предусматривается также, что соединением 30 пресс-подборщика также может быть неповорачивающееся соединение.
[0003] Пресс-подборщик 14 поддерживается главным образом посредством соприкасающихся с землей опор 22, 24 с массой прессовального механизма 18, переносимой на элементы 26 конструкции, за счет соединения 30 пресс-подборщика. В представленном варианте осуществления, Центр Тяжести ("CG") 40 прессовального механизма 18 находится в общем на одной линии с осью 32 поворота, и CG 40 будет сдвигаться по мере увеличения количества убираемого материала в прессовальном механизме 18 и по мере выгрузки тюка 23 из прессовального механизма 18 на салазки 29 тюка. Элементы 26 конструкции функционируют, как качающиеся балки с массой прессовального механизма 18, используемой для противодействия массе тюка (тюков) 23 на салазках 29 тюка. CG 40 находится в общем перед соединением 30 пресс-подборщика. Данная компоновка эффективно устраняет направленную вверх силу, передаваемую через соединение 30 пресс-подборщика, которая тем самым устраняет потенциальную направленную вверх силу, которая возникала бы на сцепке 16 по мере формирования и выгрузки тюков 23 на салазки 29 тюка и в конечном итоге на землю, если бы там не было соединения 30 пресс-подборщика.
[0004] Хотя соединение 30 пресс-подборщика показано отдельно от оси 32 поворота, также предусматривается, что соединение 30 пресс-подборщика может находиться рядом с осью 32 поворота. Кроме того, показано, что ось 32 поворота имеет общую ось с осью 42 вращения соприкасающейся с землей опоры 22. Однако, также предусматривается, что ось 32 поворота может находиться в общем рядом с осью 42 вращения, но с расположением без общей оси.
[0005] Салазки 29 тюка шарнирно соединены с элементами 26 конструкции 1 вокруг оси 44 салазок, позволяя тем самым салазкам 29 тюка поворачиваться, чтобы сваливать тюки 23, которые на них содержаться (ФИГ.13). Салазки 29 тюка передвигаются передвигающим устройством 45. Передвигающим устройством 45 можно управлять с помощью регулируемого вручную средства 53 управления (ФИГ.12) (например, гидравлического управляющего клапана) или можно управлять электрически или пневматически. Передвигающее устройство 45 содержит исполнительный механизм 46. Исполнительный механизм 46 может представлять собой гидравлический, пневматический, электрический или другой исполнительный механизм. Исполнительный механизм 46 выполнен с возможностью перемещения поворотного рычага 47. Поворотный рычаг 47 выполнен с возможностью перемещения соединительного звена 48, которое выполнено с возможностью перемещения салазок 29 тюка вокруг оси 44 салазок. Данное изобретение предусматривает другие передвигающие устройства 45 (например, электронный исполнительный механизм, соединенный непосредственно с салазками 29 тюка). Каждая из осей 32, 34, 42 и 44 показана по существу параллельной другим и перпендикулярной изображению, показанному на ФИГ.2.
[0006] Со ссылкой на ФИГ.3, показан вид сзади пресс-подборщика 14, с салазками 29 тюка в режиме втягивания, готовыми к движению по дороге или перед формированием и помещением тюков 23 (ФИГ.2) на салазки 29 тюка. Салазки 29 тюка имеют фиксированную секцию 49 и две выдвигающиеся секции 50, 51, которые выдвигаются/втягиваются вдоль направления 52. Направление 52 по существу перпендикулярно направлению 36 вперед (ФИГ.2), при этом направление 36 вперед является направлением движения пресс-подборщика 14. Выдвигающиеся секции 50, 51 показаны втянутыми внутрь частей фиксированной секции 49. Хотя также предусматривается, что части выдвигающихся секций 50, 51 также могут охватывать части фиксированной секции 49, находясь во втянутом состоянии. Взаимодействие выдвигающихся секций 50, 51 с фиксированной секцией 49 состоит в том, что возникает телескопическая взаимосвязь, а также взаимосвязь со вставкой деталей друг в друга, что можно видеть на последующих фигурах.
[0007] Со ссылкой на ФИГ.4, показано изображение пресс-подборщика 14 с выдвигающейся секцией 51 в режиме выдвижения и выдвигающейся секцией 50 в режиме втягивания. Хотя фиксированная секция 49 упоминается, как фиксированная, тем не менее она поворачивается наряду с выдвигающимися секциями 50, 51 с остальной частью салазок 29 тюка вокруг оси 44 салазок (ФИГ.2).
[0008] Со ссылкой на ФИГ.5, показан механизм 54 скольжения и платформа 56. Механизм 54 скольжения выполнен с возможностью плавного срабатывания тюка 23 вдоль направления 52. Механизм 54 скольжения выполнен с возможностью перемещения тюка 23 в соответствующем направлении таким образом, что тюк 23 оказывается по существу с опорой на каждую выдвигающуюся секцию 50, 51. Управление механизмом 54 скольжения скоординировано с перемещением тюка 23 на салазках 29 тюка и действует, располагая тюк 23 на каждой из выдвигающихся секций 50, 51.
[0009] Платформа 56 расположена по существу с плоской ориентацией и находится в положении для укладывания на нее тюка 23 прессовальным механизмом 18. Платформа 56 может наклоняться передвигающим устройством 57 (ФИГ.6). Передвигающим устройством 57 является исполнительный механизм, показанный в виде гидравлического цилиндра. Данное изобретение предусматривают другие передвигающие устройства 57 (например, электронный исполнительный механизм). Платформа 56, которая также может быть задумана, как наклонный стол, принимает тюк 23, а когда открывается задняя часть прессовального механизма 18, платформа 56 наклоняется и/или поднимает тюк 23 в общем в направлении 38 назад (ФИГ.2) для перемещения тюка 23 на салазки 29 тюка, как можно видеть на некоторых последующих фигурах.
[00010] Со ссылкой на ФИГ.6, показано еще одно изображение механизма 54 скольжения и платформы 56. Платформа 56 показана наклоненной в направлении назад и выполнена с возможностью расположения тюка 23 таким образом, чтобы он мог скользить в направлении 52 без застревания боковой стороны тюка 23 на передней части салазок 29 тюка. Это выполняется за счет расположения платформы 56, так что она толкает тюк 23 достаточно далеко назад таким образом, что механизм 54 скольжения передвигает тюк 23. Тюк 23 первоначально не контактирует с передней частью салазок 29 тюка. Это можно рассматривать, как разновидность процедуры покрытия черепицей, так что тюк 23 продвигается наряду салазками 29 тюка без чрезмерного ограничения.
[00011] Со ссылкой на фиг. 7-9, показана последовательность положений тюка 23, когда платформа 56 располагает тюк 23 на салазках 29 тюка, а механизм 54 скольжения его передвигает. После того, как тюк 23 расположен, как показано на ФИГ.9, задняя часть прессовального механизма 18 закрывается, и производится еще один тюк 23. Когда производится следующий тюк 23, механизм 54 скольжения передвигает тюк 23 на выдвигающуюся секцию 51. Когда производится третий тюк, платформа 56 передвигает этот тюк на салазки 29 тюка.
[00012] Со ссылкой на фиг. 10 и 11, показаны дополнительные детали механизма 54 скольжения посредством перспективного изображения с частичным разрезом с удаленным полом салазок 29 тюка. Механизм 54 скольжения содержит толкатель 58, передвигающие устройства 60, 62, гибкое звено 64 и звездочки 66, 68. Передвигающими устройствами 60, 62 являются исполнительные механизмы, которые показаны в данном случае в виде гидравлических цилиндров. Данное изобретение предусматривает другие передвигающие устройства 60, 62 (например, электронный исполнительный механизм). Гибкое звено 64 показано в виде цепи, которая зацепляет звездочки 66, 68. Концы гибкого звена 64 могут быть соединены с цилиндрической частью передвигающих устройств 60, 62 или с другой частью салазок 28. Протяжение штанг передвигающих устройств 60, 62 скоординировано, чтобы предотвратить возникновение чрезмерного провисания гибкого звена 64. Так как передвигающие устройства 60, 62 движутся с одинаковыми скоростями, перемещение толкателя 58 происходит с более высокой скоростью, а более конкретно с двойной скоростью перемещения передвигающих устройств 60, 62. Предпочтительно это позволяет иметь передвигающие устройства в общем с половиной длины (в их втянутом положении) расстояния, проходимого толкателем 58.
[00013] Со ссылкой на ФИГ.12, показана система 70 для регулирования скорости убранного урожая при его выгрузке из накопительного устройства 20 для урожая. Система 70 содержит устройство 72 измерения скорости (например, спидометр, радар, GPS) для измерения скорости движения накопительного устройства 20 для урожая вперед. Устройство 72 измерения скорости проиллюстрировано в виде блока 74 GPS с проводным или беспроводным сообщением с процессором 76, который, может быть соединен с дисплеем 78 на рабочем месте 15 оператора трактора 12. Дисплей 78 может включать сигнальное устройство 79, которое оповещает оператора при выгрузке убранного урожая. Предусматривается, что сигнальное устройство 79 может быть звуковым, зрительным, вибрирующим или другим типом сигнального устройства. Также предусматривается, что сигнальное устройство 79 на дисплее 78 может не включаться.
[00014] Процессор 76 проиллюстрирован в виде ЭБУ 80. В одном варианте осуществления, процессор 76 находится в сообщении с разгрузочным механизмом 28 и устройством 72 измерения скорости и выполнен с возможностью регулирования разгрузочного механизма 28, для придания требуемой скорости движения назад, и скорости движения вперед накопительного устройства 20 для урожая, для выгрузки убранного урожая со скоростью движения назад, которая по существу равна скорости движения вперед, так что при контакте убранного урожая с землей он имеет по существу нулевую скорость относительно земли.
[00015] Блок 74 GPS может быть частью сотового телефона или другого устройства. Блок 74 GPS может быть выполнен по меньшей мере с одной виртуальной линией 82 срабатывания, которая передается в процессор 76. Перед началом операции прессования оператор определит требуемое место (места), где он/она хотел бы разместить тюки 23 для их дальнейшего сбора и хранения. Выбор места (мест) размещения в общем делают для удобства оператора, учитывающего, например, такие факторы, как необходимость снижения уплотнения почвы за счет уменьшения движения на поле, близость к месту хранения и рельеф местности (например, необходимость размещения тюков 23 на вершине или у подошвы холма а не на склоне холма, необходимость размещения тюков 23 на незапаханных концах поля, вдоль канав или водоотводов для травы). Количество и частота мест размещения вдоль пути (путей) формирования тюков также ограничено урожаем сельскохозяйственной культуры в сравнении с емкостью накопительного устройства 20 для урожая. Другими словами, если конкретное поле или часть поля имеет более высокий урожай убираемого материала, в пресс-подборщик 14 будет подаваться больше сельскохозяйственной культуры на пройденную единицу и таким образом больше тюков 23 будет завершаться за более короткое расстояние, вызывая тем самым необходимость установки виртуальных линий 82 срабатывания, которые расположены ближе друг к другу. Урожай сельскохозяйственной культуры для конкретного поля и сельскохозяйственная культура могут определяться из данных истории урожая для генерирования прогнозируемого урожая сельскохозяйственной культуры, который сохраняется в справочной таблице 84, которая передается в ЭБУ 80 или, например, в процессе операции прессования за счет мониторинга потока сельскохозяйственной культуры в пресс-подборщик 14 с использованием соответствующих датчиков и/или за счет мониторинга количества тюков 23, производимых на единицу расстояния, может использоваться фактический урожай сельскохозяйственной культуры. После того, как оператор определил требуемое место (места) размещения, он или она установит в блоке GPS 78 виртуальную линию 82 срабатывания.
[00016] В еще одном варианте осуществления, процессор 76 находится в сообщении с разгрузочным механизмом 28 и устройством 72 измерения скорости и выполнен с возможностью регулирования разгрузочного механизма 28 для придания требуемой скорости движения назад и скорости движения вперед накопительного устройства 20 для урожая, для выгрузки убранного урожая со скоростью движения назад, которая является одной из: пропорциональной скорости движения вперед и по существу равной скорости движения вперед, так что убранный урожай входит в контакт с землей на виртуальной линии 82 срабатывания, в зоне, образованной заданным расстоянием от виртуальной линии 82 срабатывания, и за пределами зоны, образованной заданным расстоянием от виртуальной линии 82 срабатывания.
[00017] В еще одном варианте осуществления, система 70 оповещает оператора с помощью сигнального устройства 79 о регулировании по меньшей мере одного разгрузочного механизма 28 для придания скорости движения назад и скорости движения вперед накопительного устройства 20 для урожая, для выгрузки убранного урожая со скоростью движения назад, которая является по меньшей мере одной из: пропорциональной скорости движения вперед и по существу равной скорости движения вперед, так что при контакте убранного урожая с землей он имеет по существу нулевую скорость относительно земли.
[00018] Разгрузочный механизм 28 содержит салазки 29 тюка и передвигающее устройство 45. Разгрузочный механизм 28 выполнен с возможностью избирательного наклона салазок 29 тюка вокруг оси 44 (ФИГ.13) для придания тюкам 23 требуемой скорости движения назад, когда их сбрасывают на землю. сбрасывание тюков 23 может начинаться с одного, двух или трех тюков. Платформа 56 может быть выполнена с возможностью перемещения вместе с салазками 29 тюка, когда салазки 29 тюка наклоняются, обеспечивая чтобы средний тюк также сбрасывался на землю с требуемой скоростью движения назад. Платформа 56 может быть соединена с салазками 29 тюка вокруг шарнирного соединения.
[00019] Предпочтительно, предложенное изобретение может выдвигать выдвигающиеся секции 50, 51 за счет действия механизма 54 скольжения по мере того, как тюк 23 толкают либо на секцию 50, либо на секцию 51. Это может быть действие, которое происходит при первом использовании в поле, или секции 50 и 51 могут быть подпружинены, что вызывает их втягивание каждый раз, когда тюки сбрасываются с салазок 29 тюка. Также предусматривается, что секции 50 и 51 можно выдвигать вручную или с помощью исполнительного механизма (не показан). Дополнительно, система 70 может определять направленный в сторону наклон пресс-подборщика 14, вызывающий перемещение тюка 23 в сторону пресс-подборщика 14 вверх по склону (если это место пустое) для улучшения за счет этого устойчивости.
[00020] Несмотря на то, что данное изобретение было описано в отношении по меньшей мере одного варианта осуществления, предложенное изобретение может быть дополнительно модифицировано в пределах сущности и объема правовых притязаний данного изобретения. Вследствие этого, данная заявка охватывает любые варианты, применения или адаптации изобретения с использованием его общих принципов. Кроме того, данная заявка охватывает такие отклонения от предложенного изобретения, которые попадают в пределы известной или общепринятой практики в области, к которой относится данное изобретение, и которые попадают в объем приложенной формулы изобретения.
[00020] В следующей формуле изобретения изложены различные признаки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕСС ДЛЯ ФОРМИРОВАНИЯ ПРЯМОУГОЛЬНЫХ ТЮКОВ | 2015 |
|
RU2682442C2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ПЛОТНОСТИ | 2013 |
|
RU2606530C1 |
| СИСТЕМА СКЛАДИРОВАНИЯ ТЮКОВ | 2005 |
|
RU2371906C2 |
| Пресс-подборщик поршневого типа | 1982 |
|
SU1042666A1 |
| СЕНСОРНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РЫЧАГА МЕХАНИЗМА НАТЯЖЕНИЯ ШПАГАТА | 2013 |
|
RU2644595C2 |
| РУЛОННЫЙ ПРЕСС-ПОДБОРЩИК | 2006 |
|
RU2417574C2 |
| ОБВЯЗОЧНОЕ УСТРОЙСТВО | 2010 |
|
RU2532270C2 |
| ПРЕСС-ПОДБОРЩИК С СИСТЕМОЙ УПРАВЛЕНИЯ ЗАПУСКОМ | 2014 |
|
RU2606528C1 |
| УБОРОЧНЫЙ ПРИЦЕП | 1969 |
|
SU241338A1 |
| ПРЕСС-ПОДБОРЩИК И СПОСОБ УСОВЕРШЕНСТВОВАННОГО МАНИПУЛИРОВАНИЯ ТЮКОМ | 2015 |
|
RU2697048C2 |










Изобретение относится к сельскому хозяйству. Система регулирования скорости убранного урожая при его выгрузке на поле из накопительного устройства для урожая содержит разгрузочный механизм для придания убранному урожаю требуемой скорости движения назад при его выгрузке из накопительного устройства для урожая и устройство измерения скорости для измерения скорости движения вперед накопительного устройства для урожая. Система подает оператору сигнал регулирования по меньшей мере одного разгрузочного механизма для придания скорости движения убранного урожая назад и скорости движения вперед накопительного устройства для урожая. Скорость выгрузки убранного урожая со скоростью движения назад пропорциональна скорости движения накопительного механизма вперед и по существу равна скорости движения вперед. При контакте убранного урожая с землей он имеет по существу нулевую скорость относительно земли, что обеспечивает размещение убираемого материала в заданном месте. 5 з.п. ф-лы, 13 ил.
1. Система регулирования скорости убранного урожая при его выгрузке на поле из накопительного устройства для урожая, содержащая:
разгрузочный механизм для придания убранному урожаю скорости движения назад при его выгрузке из накопительного устройства для урожая; и
устройство измерения скорости для измерения скорости движения вперед накопительного устройства для урожая;
при этом система подает оператору сигнал регулирования по меньшей мере одного разгрузочного механизма для придания скорости движения назад и скорости движения вперед накопительного устройства для урожая для выгрузки убранного урожая со скоростью движения назад, которая является по меньшей мере одной из: пропорциональной скорости движения вперед и по существу равной скорости движения вперед, так что при контакте убранного урожая с землей он имеет по существу нулевую скорость относительно земли.
2. Система по п. 1, в которой разгрузочным механизмом является узел салазок, содержащий салазки, гидравлический цилиндр для перемещения салазок и регулируемый вручную клапан управления гидравлическим потоком для регулирования гидравлического цилиндра.
3. Система по п. 1, в которой разгрузочным механизмом является узел салазок, содержащий салазки и электрический двигатель для перемещения салазок.
4. Система по п. 1, в которой устройством измерения скорости является одно из блока GPS, спидометра и радара, сконфигурированного по меньшей мере с одной виртуальной линией срабатывания, которая передается оператору, при этом оператор осуществляет по меньшей мере одно из активирования разгрузочного механизма и изменения скорости движения вперед накопительного устройства для урожая для выгрузки убранного урожая со скоростью движения назад, которая является одной из: пропорциональной скорости движения вперед и по существу равной скорости движения вперед, так что убранный урожай входит в контакт с землей по существу на виртуальной линии срабатывания.
5. Система по п. 4, в которой блоком GPS является сотовый телефон.
6. Система по п. 1, дополнительно содержащая сигнальное устройство, которое оповещает оператора при выгрузке убранного урожая.
| US 4534691 A1, 13.08.1985 | |||
| US 7401547 B2, 22.07.2008 | |||
| Способ уборки зерновых культур и зерноуборочный комбайн | 1983 |
|
SU1181590A1 |
| СПОСОБ УКЛАДКИ ХЛЕБНОЙ МАССЫ ВАЛКА НА СТЕРНЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2262829C1 |
| Бактерицидный пластырь | 1960 |
|
SU134395A1 |

