Настоящее изобретение относится к способу подвешивания птицы на захватном приспособлении и устройству для применения в таком способе.
На большинстве птицебоен, в частности птицебоен домашней птицы, птицы, подлежащие убою, подвешиваются на захватные приспособления для убоя на подвесном конвейере перед убоем, ощипыванием и/или потрошением. Подвешивание птиц вручную является тяжелым и монотонным трудом, и поэтому желательным является предоставление надежной автоматизации процесса.
В документах WO 2011/116774 и ЕР 1276382 описаны примеры устройств и способов, позволяющие по меньшей мере наполовину автоматизировать процесс. Птицы размещаются на ободе опорной поверхности, при этом лапы выступают над краем опорной поверхности и зафиксированы в фиксаторах, проходящих рядом с опорной поверхностью на отдельном конвейере. Фиксаторы и закрепленные птицы затем перемещаются от опорной поверхности к перегрузочной станции, где птицы переносятся с фиксаторов на захватные приспособления для убоя для обработки. Это работает очень хорошо, но все еще случается, что захватное приспособление не захватывает ноги птицы правильно, и размещение птиц в фиксаторах осуществляется вручную.
В документе US 5108345 предложено применение удерживающих приспособлений для лапы в форме желоба, которые способствуют окружению лап птиц, как только ноги были зафиксированы, и удерживают пальцы во время вставки в захватные приспособления. Это решение, однако, является относительно сложным и один или несколько пальцев все еще могут выступать из удерживающего приспособления для лапы и захватываться на неправильной стороне захватного приспособления.
Поэтому основной целью изобретения является предоставление улучшенного способа для подвешивания птиц для убоя, где риск неправильного захвата ног захватным приспособлением снижен, и вторичной целью является предоставление устройства, допускающего по меньшей мере частичную автоматизацию способа.
Основная цель достигается способом, включающим следующую последовательность этапов:
I) сгибание по меньшей мере одной ноги в пяточном суставе, так чтобы лапа приблизилась к груди птицы, тем самым вызывая сведение пальцев лапы вместе,
II) вставку ноги в захватное приспособление,
III) по меньшей мере частичное освобождение ноги.
При сгибании ноги в пяточном суставе так, что лапа приближается к груди птицы, пальцы лапы автоматически сгибаются и сводятся вместе из-за натяжения мышц и сухожилий, таким образом вызывая сжатие лапы.
В этом сжатом состоянии, где сгибание вызвало сведение пальцев лап вместе, лапа занимает гораздо меньше пространства, таким образом облегчая вставку ноги в захватное приспособление для убоя. Таким образом, лапа и пальцы располагаются оптимально для сцепления с захватным приспособлением. Тем не менее, еще более плотное сжатие может быть получено за счет расширения коленного сустава между голенью и бедром.
В частности, это является преимущественным при применении захватных приспособлений замкнутого типа, подобным показанным, например, в документе US 29819723, где во время этапа II) лапа/лапы должны проходить через одно или несколько отверстий в захватном приспособлении. Захватные приспособления замкнутого типа имеют преимущество в том, что они не запутываются легко, что, в частности, может являться проблемой во время ощипывания птиц, и поэтому являются предпочтительными в качестве захватных приспособлений для убоя на многих птицебойнях.
Как только нога была вставлена в захватное приспособление, она по меньшей мере частично освобождается, вызывая разведение пальцев друг от друга, так что лапа вновь расширяется и открывается. Это может способствовать предотвращению выхода ноги из захватного приспособления во время последующей обработки птицы, так как пальцы будут работать как крючки.
Большинство захватных приспособлений, применяемых на сегодня, выполнены с возможностью подвешивания птицы за обе ноги, и поэтому предпочтительным является сгибание обеих ног так, чтобы их можно было легко вставлять, и обе ноги предпочтительно сгибаются в одной операции. Для ясности следующее описание изобретения будет ссылаться исключительно на варианты осуществления, в которых сгибаются обе ноги, и птица подвешивается за обе ноги, но следует понимать, что это требование не является необходимым.
Следует отметить, что изобретение описано в отношении только здоровых птиц. У птиц, имеющих повреждения и/или деформации, пальцы могут не сводиться вместе при сгибании ноги и/или количество пальцев на одной или обеих лапах может быть аномальным, так что, когда пальцы сведены вместе, лапа имеет другую форму.
Сгибание ног и вставка в захватное приспособление может осуществляться вручную. Однако для достижения вторичной цели изобретения предусматривается устройство, содержащее механизм для сгибания ног, и позиционирующий механизм, указанный механизм для сгибания ног приспособлен для сгибания по меньшей мере одной ноги птицы в пяточном суставе так, что лапа приближается к груди птицы, и указанный позиционирующий механизм приспособлен для позиционирования ноги (ног) птицы с целью зацепления с захватным приспособлением на конвейере.
Механизм для сгибания ног может быть выполнен с зацепным элементом и держателем. При использовании зацепной элемент располагается на стороне ноги, обращенной к груди, чтобы препятствовать перемещению пяточного сустава в направлении груди птицы, и указанный держатель используется для прижатия лапы к груди. Один зацепной элемент и/или один держатель может зацеплять обе ноги птицы, например, с целью достижения по существу синхронного сгибания ног, но преимущественным также может быть применение двух или нескольких, расположенных на каждой стороне птицы.
Следует отметить, что фраза "препятствовать перемещению сустава" не подразумевает того, что зацепной элемент должен удерживать пяточный сустав в точно таком же положении относительно тела во время сгибания ноги. Он должен только обеспечивать сопротивление движению голени, которое в противном случае могло бы возникнуть в результате толкания лапы к груди, чтобы нога фактически сгибалась в пяточном суставе вместо простого качания в бедре. К тому же, незначительное движение сустава в направлении спины птицы вследствие зацепления с зацепным элементом также может быть приемлемым или даже желательным для уменьшения риска разрывов на ноге или для более близкого сведения пальцев вместе.
Птица и зацепной элемент могут перемещаться относительно друг друга, так что во время процесса сгибания положение зацепного элемента относительно пяточного сустава изменяется. Зацепной элемент и/или держатель могут следовать по предварительно определенной траектории по отношению к птице, но также могут быть выполнены с возможностью смещения для приспособления к разнице в размере и форме обрабатываемых птиц.
На данном этапе преимущественным считается сначала зацепление зацепным элементом ноги и затем прижатие держателем лапы к груди, но в зависимости, например, от типа, породы и размера птицы и того, была ли птица оглушена или умерщвлена заблаговременно, может быть применена другая последовательность операций. Оглушение или умерщвление птицы перед этапом I) имеет преимущество в том, что она не сопротивляется сгибанию, что потенциально может вызывать повреждения, в частности, ног и крыльев. Однако достаточным может быть осуществление процесса подвешивания в темной комнате, так как большинство птиц склонны расслабляться в темноте.
Держатель предпочтительно подталкивает сторону плюсны, обращенную к спине, но может также осуществлять тянущее действие и/или может зацеплять лапу или пальцы.
Скорость и усилие действия зацепного элемента и держателя должны выбираться так, чтобы максимально уменьшить риск повреждений птицы. То, каким именно должно быть действие, зависит от ряда факторов, таких как размер, форма и материал зацепного элемента и держателя, а также тип и размер птицы, и должно определяться экспериментом. Такие эксперименты должны быть простыми и не должны представлять какую-либо трудность специалисту в области техники.
Движения, описанные выше и ниже, являются относительными движениями между птицей и разными частями устройства, что означает то, что они могут достигаться за счет движения птицы или ее части, за счет движения устройства или его части или за счет сочетания таких движений.
Для облегчения сгибания ног тело птицы может располагаться на опоре и/или фиксироваться во время этапа I). Подобным образом, вставка ног в захватное приспособление может облегчаться за счет поддерживания и/или фиксирования птицы во время этапа II). Опора может представлять собой просто поверхность, на которой лежит тело птицы, но могут быть использованы и более сложные опоры, имеющие форму, соответствующую форме тела. Фиксация может, например, достигаться за счет прижатия тела птицы к опоре, возможно только под воздействием силы тяжести, за счет удерживания за крылья и/или за счет расположения птицы в удерживающем приспособлении, окружающем тело птицы полностью или частично. Удаление тела птицы с опорной поверхности или наоборот, так чтобы птица подвешивалась за ноги под действием силы тяжести, может способствовать процессу сгибания.
Следует отметить, что между этапами I) и II) способа не должно быть четкого разделения, что означает, что сгибание ног само по себе может вызывать вхождение ног в контакт или зацепление с захватным приспособлением. Подобным образом, позиционирующий механизм может представлять собой встроенную часть механизма для сгибания ног, так что в конце процесса сгибания ног ноги устанавливаются для зацепления с захватным приспособлением.
Далее изобретение будет описано более подробно со ссылкой на графические материалы, где:
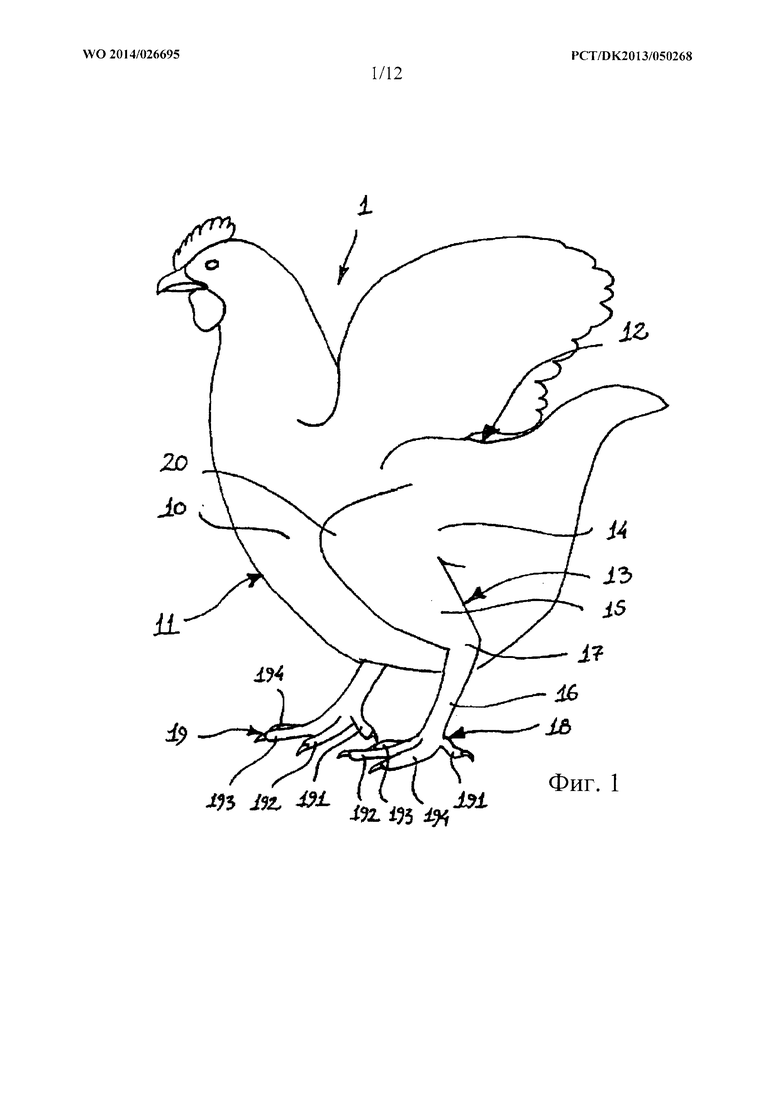
на фиг. 1 изображен эскиз живой курицы,
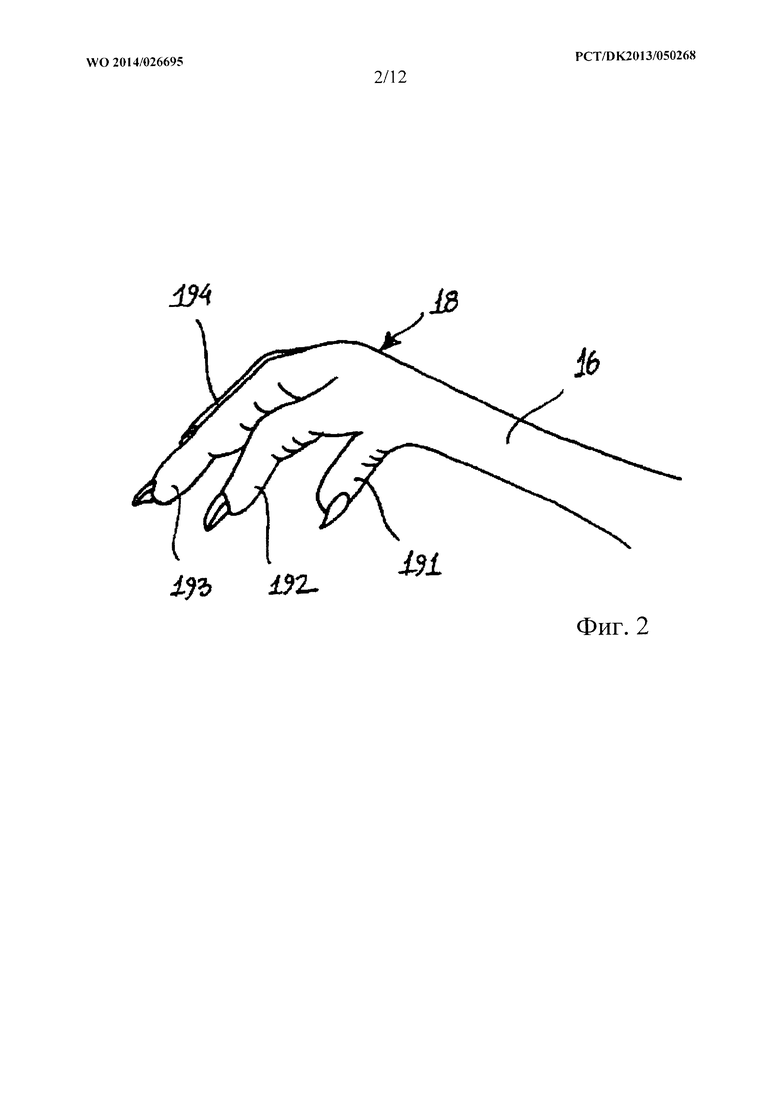
на фиг. 2 изображен эскиз правой лапы курицы с фиг. 1, когда нога согнута,
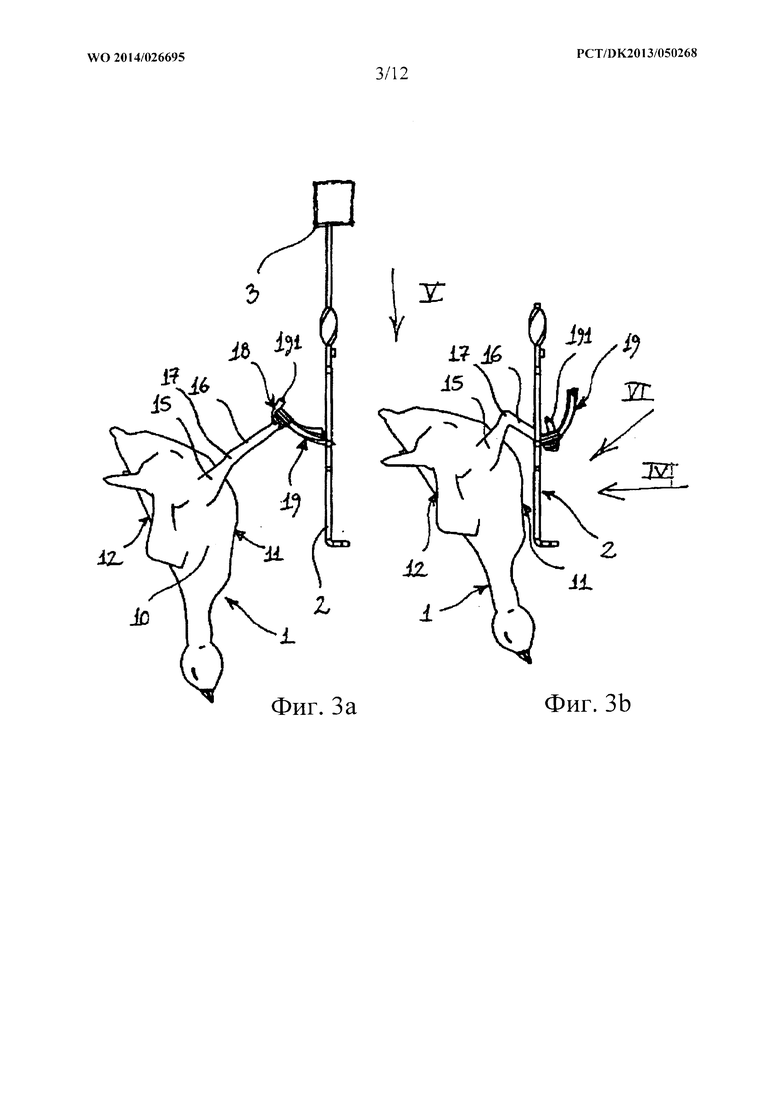
на фиг. 3а изображен схематический вид сбоку курицы с ногами в их разогнутом положении и перед зацеплением с захватным приспособлением для убоя,
на фиг. 3d изображен схематический вид сбоку, соответствующий фиг. 3а, но где ноги курицы согнуты и введены в зацепление с захватным приспособлением для убоя,
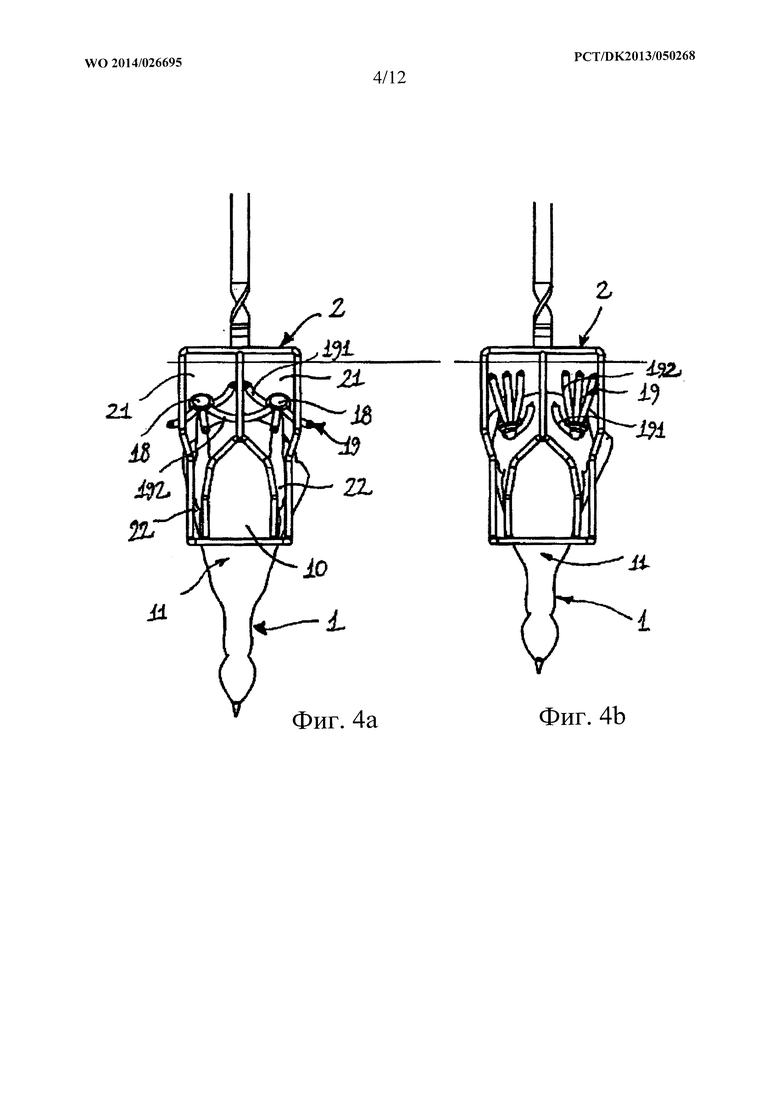
фиг. 4а и 4b соответствуют фиг. 3а и 3b соответственно, но показывают вид с правой стороны, что указано стрелкой IV,
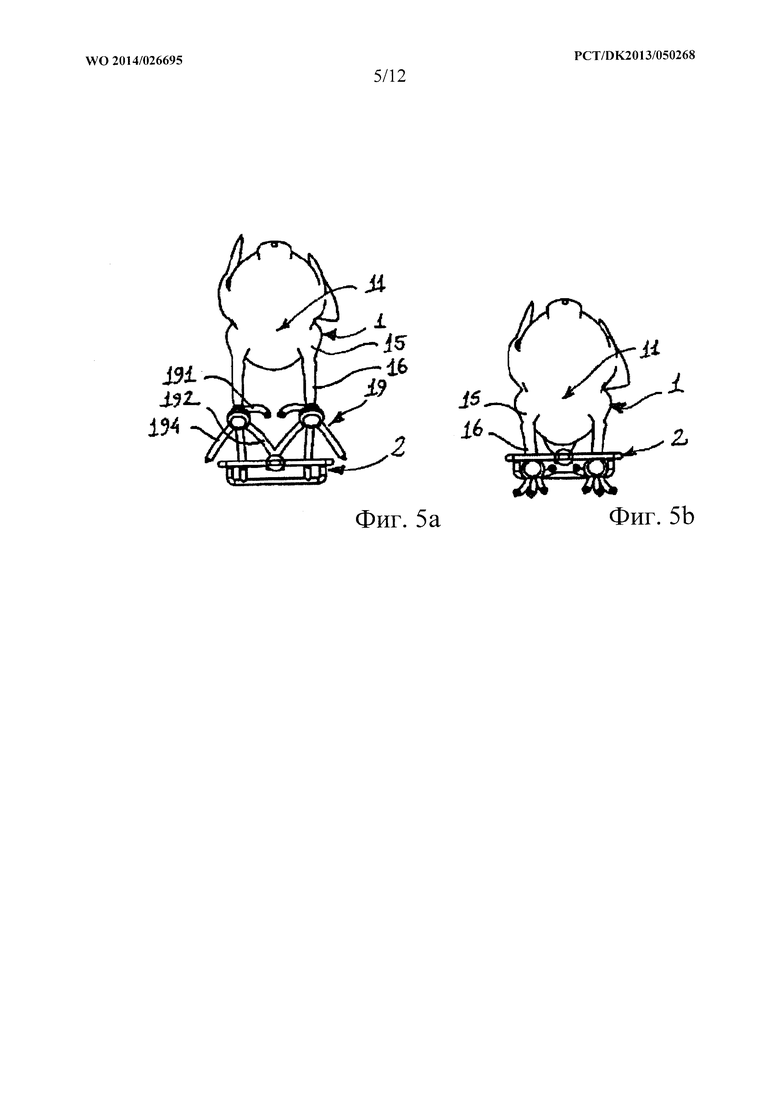
фиг. 5а и 5b соответствуют фиг. 3а и 3b соответственно, но показывают вид сверху, что указано стрелкой V,
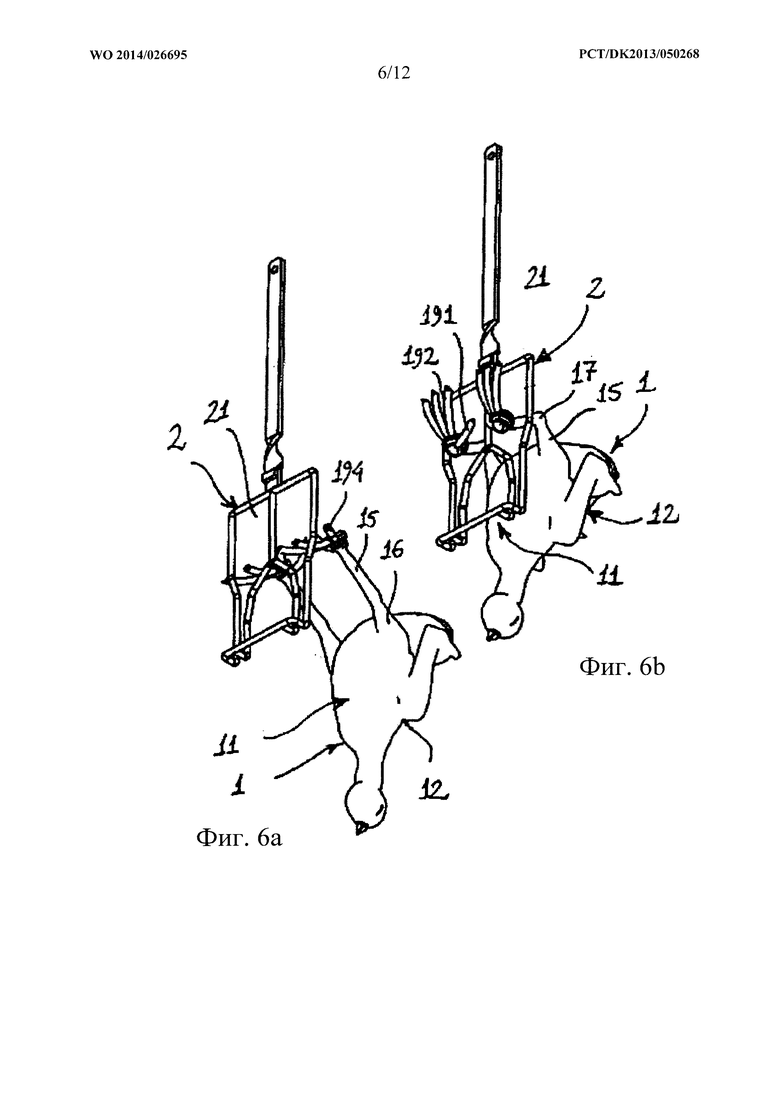
фиг. 6а и 6b соответствуют фиг. 3а и 3b соответственно, но показывают вид в перспективе, как указано стрелкой VI,
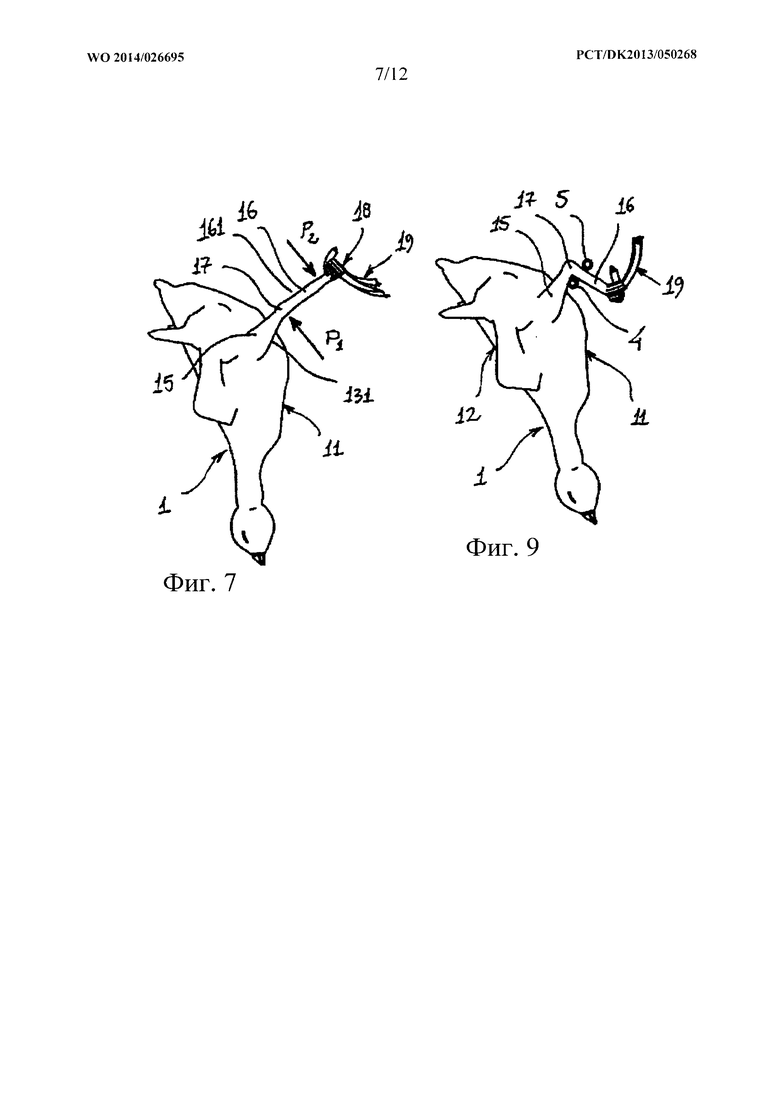
на фиг. 7 изображен схематический вид курицы с ногами в их разогнутом положении,
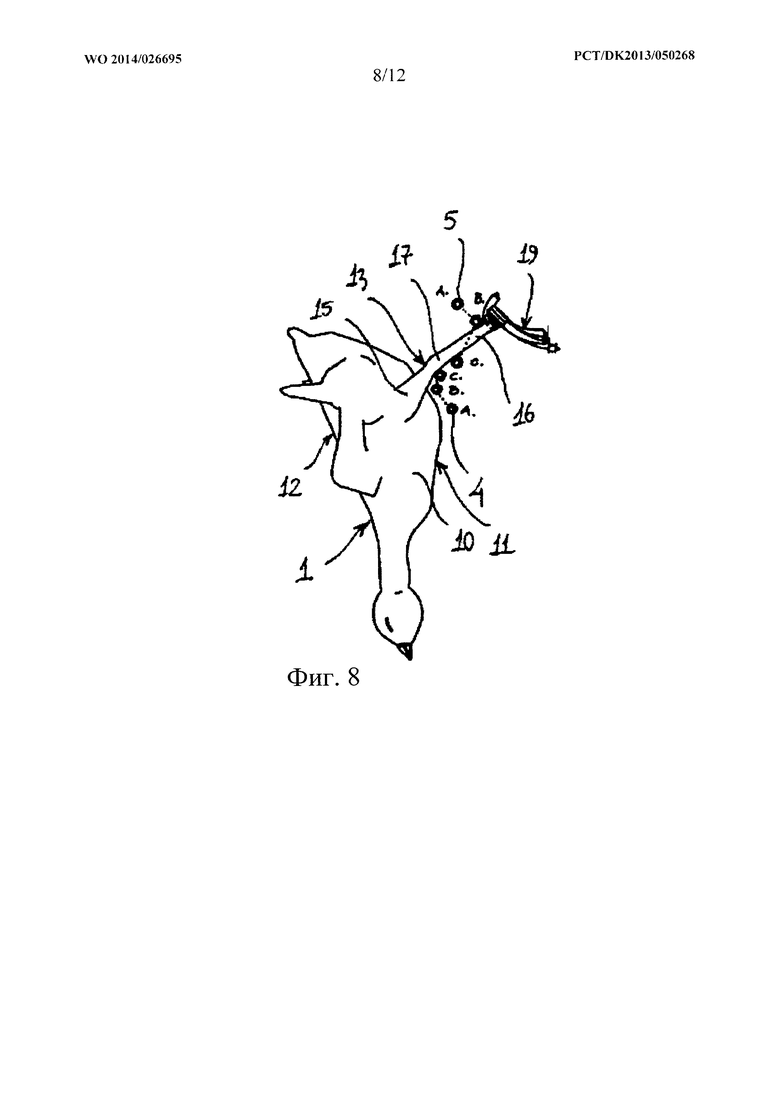
фиг. 8 соответствует фиг. 7, дополнительно показывая три разных положения системы направляющих для сгибания ног,
фиг. 9 соответствует фиг. 8, но показывает только последнее положение системы направляющих и согнутые ноги курицы,
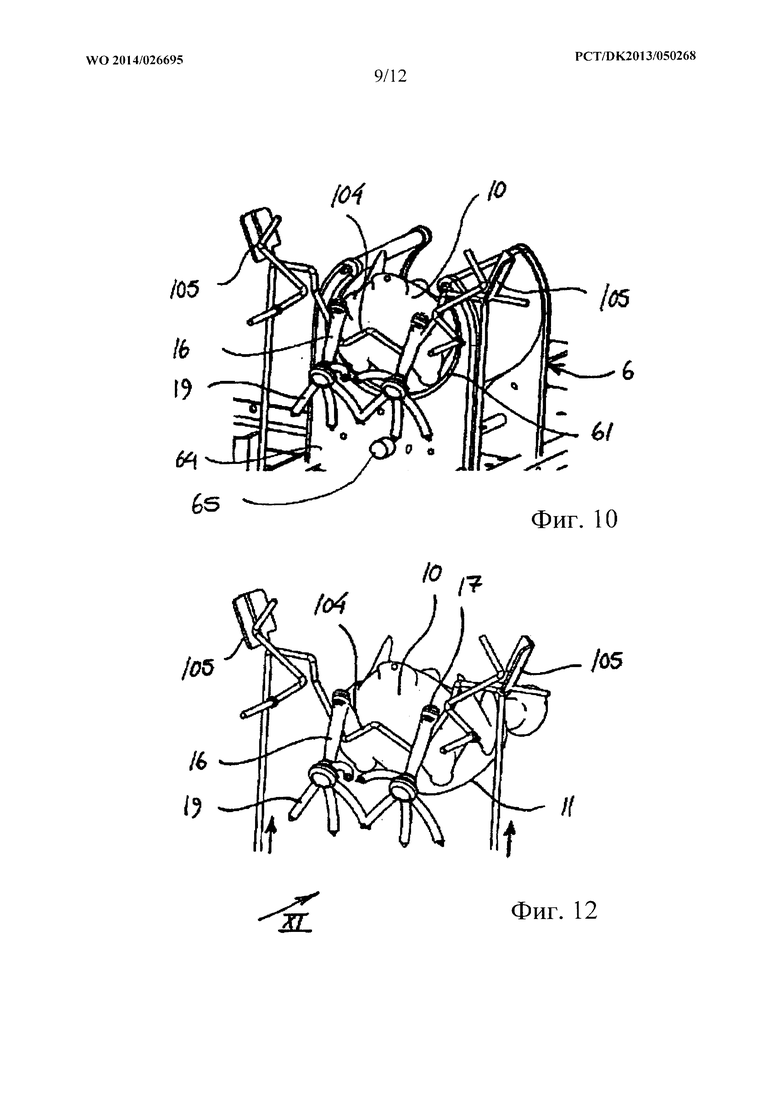
на фиг. 10 изображен эскиз в перспективе курицы, расположенной в удерживающем приспособлении в установке для сгибания ног,
фиг. 12 соответствует фиг. 10, но показывает только курицу, зацепной элемент и держатели,
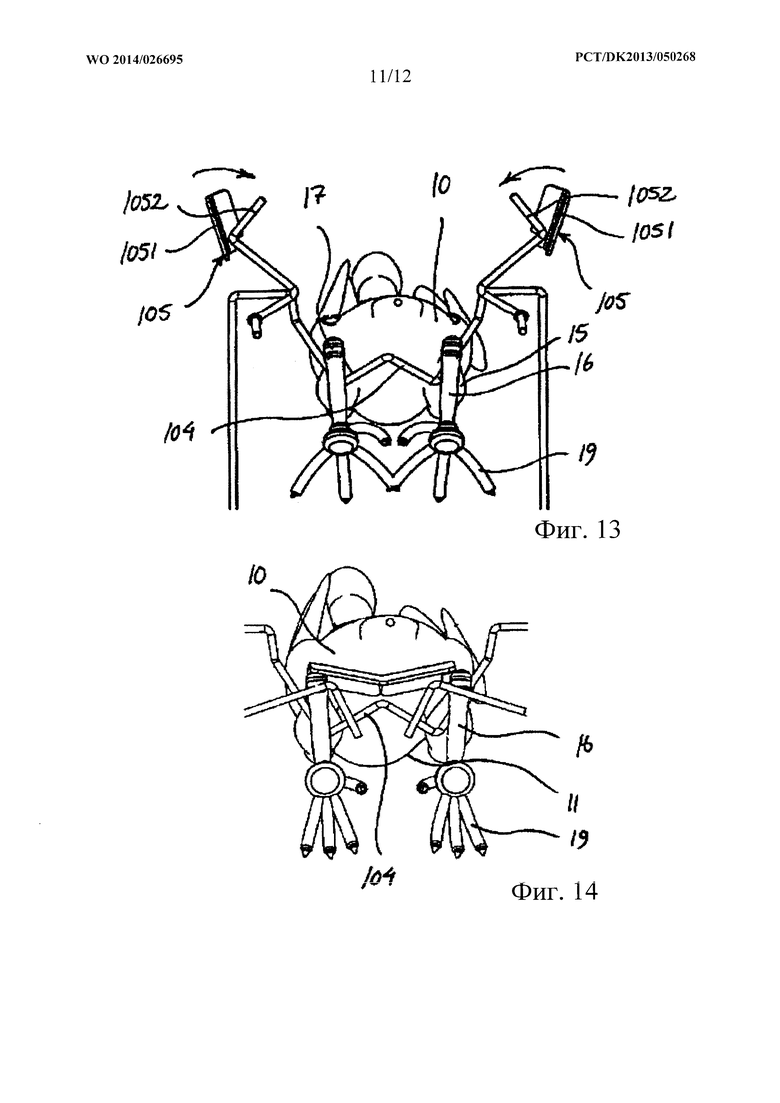
фиг. 13 соответствует фиг. 12, но дан вид сзади, как показано стрелкой XI на фиг. 12,
фиг. 14 соответствует фиг. 13, но показывает держатели в закрытом положении,
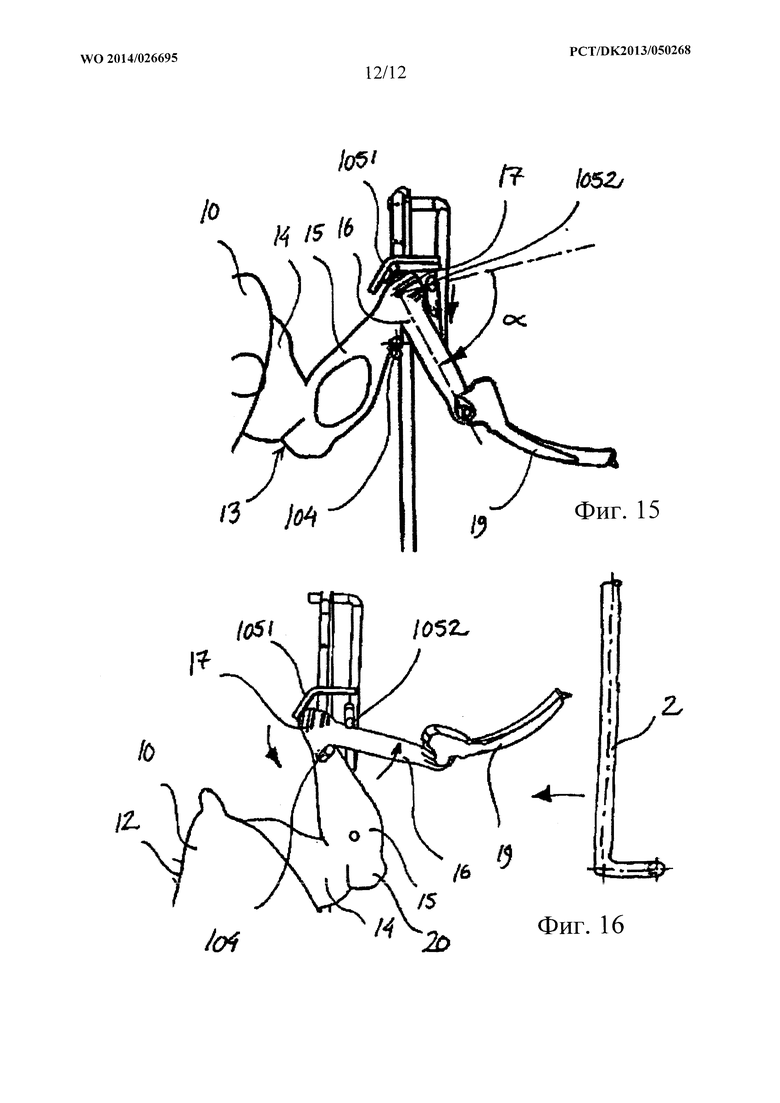
на фиг. 15 изображен разрез, на котором видно, что нога курицы удерживается зацепным элементом и держателем, как на фиг. 10-14, и
фиг. 16 соответствует фиг. 15, но где тело курицы было освобождено, чтобы свисать под действием силы тяжести.
На фиг. 1 курица изображена живой и стоя, чтобы проиллюстрировать анатомию птицы, обычно используемую для потребления людьми и, таким образом, обрабатываемую на птицебойнях в больших количествах. Однако следует понимать, что в соответствии с изобретением могут обрабатываться и другие типы птиц, такие как утки, гуси, индюки, перепелки или голуби.
В дальнейшем ориентация птицы 1 и ее частей будет определяться ориентацией ее груди 11 и спины 12. В этом отношении следует отметить, что, при использовании таких выражений, как "в направлении стороны, обращенной к груди" и "в направлении стороны, обращенной к спине", смысл заключается только в обозначении двух противоположных общих направлений, а не точный угол.
Курица показана с поднятым крылом, чтобы обеспечить лучший вид ноги 13, которая содержит бедро 14, голень 15 и плюсну 16. Бедро и голень соединены в коленном суставе 20, голень и плюсна соединены в пяточном суставе 17, и плюсна проходит от пяточного сустава к лапе 18. Как можно видеть, в естественном положении ноги пяточный сустав 17 незначительно согнут, при этом угол между голенью и плюсной на стороне ноги, обращенной к груди, меньше, чем на стороне ноги, обращенной к спине. Полное растяжение ноги, так чтобы тибиотарзальная кость внутри голени стала параллельна плюсне, обычно невозможно.
Лапа 18 содержит четыре пальца 19, первый палец 191 выступает по существу в направлении стороны, обращенной к спине, а второй 192, третий 193 и четвертый 194 пальцы выступают в направлении стороны, обращенной к груди.
Когда курица поднимает лапу 18, она тянет лапу в направлении груди 11, сгибая ногу в пяточном суставе 17. Это приводит к натяжению сухожилий (не показаны) в ноге, что заставляет пальцы 19 автоматически сводиться вместе и постепенно сгибаться до сжатого положения, показанного на фиг. 2.
На современных птицебойнях птицы 1 подвешиваются в захватные приспособления 2, движущиеся на подвесном конвейере 3, как показано на фиг. 3а и 4а, посредством прохождения лап 18 через отверстия 21 в захватном приспособлении и/или размещения плюсен в углублениях 22. Когда тело 10 птицы отпускают, позволяя свободно висеть на захватном приспособлении, оно опускается под собственным весом, пока лапы не войдут в плотное примыкание (не показано) с захватным приспособлением.
Подвесной конвейер, который может перемещаться в плоскость страницы или из нее на фиг. 3а, показан только на фиг. 3а, но следует понимать, что захватные приспособления, показанные на других фигурах, также установлены на таких конвейерах. Конструкция таких конвейеров хорошо известна специалистам в данной области техники и поэтому здесь описана не будет.
Подвешивание на захватных приспособлениях, как описано выше, применялось на протяжении десятилетий и зарекомендовало себя как очень надежное, независимо от того, была птица оглушена или умерщвлена перед подвешиванием или нет. Однако с возросшим использованием автоматических устройств для подвешивания птицы было обнаружено, что лапы 18 и ноги 13 птиц 1 не всегда правильно входят в зацепление с захватным приспособлением 2, что приводит к тому, что птица падает или подвешена за одну ногу. Теперь эта проблема была решена путем сгибания ног птицы, так что пальцы сводятся вместе, как описано выше со ссылкой на фиг. 1 и 2, перед введением лап и ног в зацепление с захватным приспособлением. Таким образом лапы занимают значительно меньше пространства и поэтому легче проходят в отверстия 21 в захватном приспособлении, как показано на фиг. 3b и 4b, без необходимости в сложных удерживающих приспособлениях для лап. Сравнивая фиг. 4а и 4b, можно увидеть, что смыкание лап, в частности, минимизирует риск того, что один или несколько пальцев 19 попадут на неправильную сторону захватного приспособления. Это не только минимизирует риск того, что лапа вообще не пройдет через отверстие, но также уменьшает риск перелома пальцев, таким образом увеличивая стоимость лап в качестве продукта питания.
На фиг 5а, 5b и фиг. 6а и 6b с разных углов изображена разница между подвешиванием за лапы в их естественном положении и в сомкнутом положении.
Изображение показывает только захватные приспособления 2 замкнутого типа, которые, в частности, являются преимущественными в качестве захватных приспособлений для убоя, так как они не запутываются легко, в частности во время ощипывания птиц, но изобретение, без сомнения, также применяется в случае применения захватных приспособлений более открытой конструкции.
На фиг. 3а, 4а, 5а и 6а птица 1 показана с пальцами 19 в относительно разведенном состоянии, которое является естественным состоянием, когда птица в сознании. Если птица была оглушена или умерщвлена перед подвешиванием, лапы будут расслабленными, и пальцы будут немного ближе друг к кругу, чем показано, но все же при подвешивании птиц без сознания регулярно возникает проблема попадания пальцев на неправильную сторону захватного приспособления 2.
Как таковое сгибание ног 13 может быть осуществлено, как показано на фиг. 7 за счет приложения первого усилия Р1 к стороне 131, обращенной к груди, в пяточном суставе 17 и второго усилия Р2 на стороне 161 плюсны 16, обращенной к спине. Эти усилия могут прикладываться за счет активного подталкивания соответствующих частей ноги или прижатия ноги к неподвижному упорному элементу, возможно с использованием силы тяжести. Тянущее усилие на противоположной стороне ноги конечно приведет к тому же результату, но на практике может быть сложным в применении.
Первое усилие Р1 также может прикладываться к голени 15, а второе усилие Р2 может прикладываться к лапе 18 или даже к пальцам 19 и направление сил не должно быть именно таким, как показано на фиг. 7, которая направлена только на демонстрацию принципа.
В одном возможном варианте осуществления, который является структурно простым и, таким образом, надежным, механизм для сгибания ног содержит две непараллельные направляющие 4, 5 в форме прута, как показано на разрезе на фиг. 8. При использовании нога 13 птицы 1 проходит между направляющими: первой направляющей 4, служащей в качестве зацепного элемента, и второй направляющей 5, служащей в качестве держателя. На входном краю системы направляющих направляющие 4, 5 находятся на относительно большом расстоянии друг от друга, что показано разрезами, обозначенными А. Дальше в направлении движения птицы направляющие 4, 5 располагаются ближе друг к другу и входят в контакт с телом 10 и плюсной 16 птицы соответственно, как показано ситуацией В. Еще дальше обе направляющие 4, 5 располагаются возле пяточного сустава 17, как показано ситуацией C, при этом верхняя направляющая 5 прижимает плюсну до положения, показанного на фиг. 9.
Направляющие предпочтительно являются неподвижными, однако могут иметь возможность смещения, как будет описано ниже. Это имеет преимущества в том, что непрерывный поток птиц может проходить в механизм для сгибания ног и затем перемещаться на непрерывный ряд захватных приспособлений, идущих по подвесному конвейеру таким образом, который хорошо известен специалисту в области техники. Последняя часть системы направляющих, таким образом, работает как позиционирующий механизм, но безусловно возможным является раздельное исполнение.
При прохождении через систему направляющих 4, 5, птица 1 может удерживаться любым подходящим способом, или за счет подвешивания на конвейере, лежания на опорной поверхности или удерживания вручную, до тех пор, пока ноги 13 птицы могут свободно пройти между двумя направляющими, как объясняется выше. Траектории движения птицы не должны быть прямолинейными. Напротив, преимущественным может быть перемещение тела 10 птицы из лежачего положения в положение головой вниз, показанное на фиг. 9. Возможно даже начать из положения, в котором голова вверху, возможно начиная с птицами в сознании, стоящими на своих лапах. Направляющие также могут быть расположены в отличной пространственной ориентации с целью приспособления для соответствия отличному пространственному положению тела птицы во время обработки.
Как описывается выше, сгибание в пяточном суставе 17 приводит к натяжению сухожилий и мышц в ногах 13, что в свою очередь вызывает сведение пальцев вместе и сжатие лапы 18. Вместе с тем, более плотное сжатие может достигаться за счет расширения коленного сустава 20. Этого можно, например, достигнуть, позволив телу птицы висеть на механизме для сгибания ног под действием силы тяжести, или, альтернативно, обеспечив систему направляющих, описанную выше, одной или несколькими дополнительными направляющими (не показаны), определяющими траекторию голени и бедра по отношению друг к другу.
Направляющие 4, 5 могут быть изогнуты так, чтобы система направляющих имела общую форму в виде сектора или круга, если смотреть сверху и/или была выполнена с возможностью перемещения, например, за счет гидравлики. Применение гидравлики имеет дополнительное преимущество в том, что она может позволять направляющей смещаться, если давление на птицу становится слишком высоким, и это, несомненно, также применяется для других вариантов осуществления зацепных элементов и/или держателей. Таким образом, риск повреждений птицы может быть минимизирован, система будет способна адаптироваться к различиям в размере и форме птицы. Подобный эффект смещения может достигаться с помощью пружин.
Чтобы минимизировать риск повреждений кожи на ногах птиц, направляющие предпочтительно имеют форму с круглым поперечным сечением и выполнены с гладкой поверхностью с низким сопротивлением трению. Низкое сопротивление трению также обеспечивает, что ноги плавно проходят между и вдоль направляющих и не натягиваются с перекосом по отношению к телу птицы, что потенциально может вести к их застреванию и, таким образом, к задержке производства.
В альтернативном варианте осуществления (не показан), тело 10 птицы фиксируется относительно опорной поверхности и располагается так, что ее ноги выступают за ее край, указанная опорная поверхность также служит в качестве зацепного элемента ноги. Держатель затем движется близко к краю опорной поверхности в направлении, перпендикулярном плоскости опорной поверхности, так что он вступает в контакт с лапами или плюснами и прижимает плюсны в направлении его движения, тем самым вызывая сгибание пяточных суставов. Если птица лежит грудью вниз, держатель должен перемещаться вниз и наоборот.
Опорная поверхность не должна быть плоской, но может быть удерживающим приспособлением, приспособленным, чтобы соответствовать форме тела птицы. Подобным образом, опорная поверхность может содержать углубления или скобы, приспособленные для удержания ног, чтобы они не отстранялись держателем во время сгибания.
В данном варианте осуществления держатель предпочтительно представляет собой прут, имеющий форму с круглым поперечным сечением, который качается, вращается или смещается для прохождения по краю опорной поверхности. В качестве примера, каждый из двух прутов может располагаться на каждой стороне опорной поверхности и может быть выполнен с возможностью качания внутрь и вниз для вхождения каждого в контакт с одной ногой птиц, при этом пруты по существу параллельны, и их свободные концы приближаются друг к другу, когда они входят в контакт с ногами птицы.
В другом альтернативном варианте (не показан), плюсны птицы зажимаются в по существу горизонтальном положении между двумя удерживающими элементами или между удерживающим элементом и опорной поверхностью, и затем телу 10 птицы предоставляется возможность висеть по существу свободно, тем самым позволяя силе тяжести действовать на ноги.
Как показано на фиг. 10-16, в еще одном варианте осуществления сочетаются принципы, лежащие в первых двух вариантах осуществления.
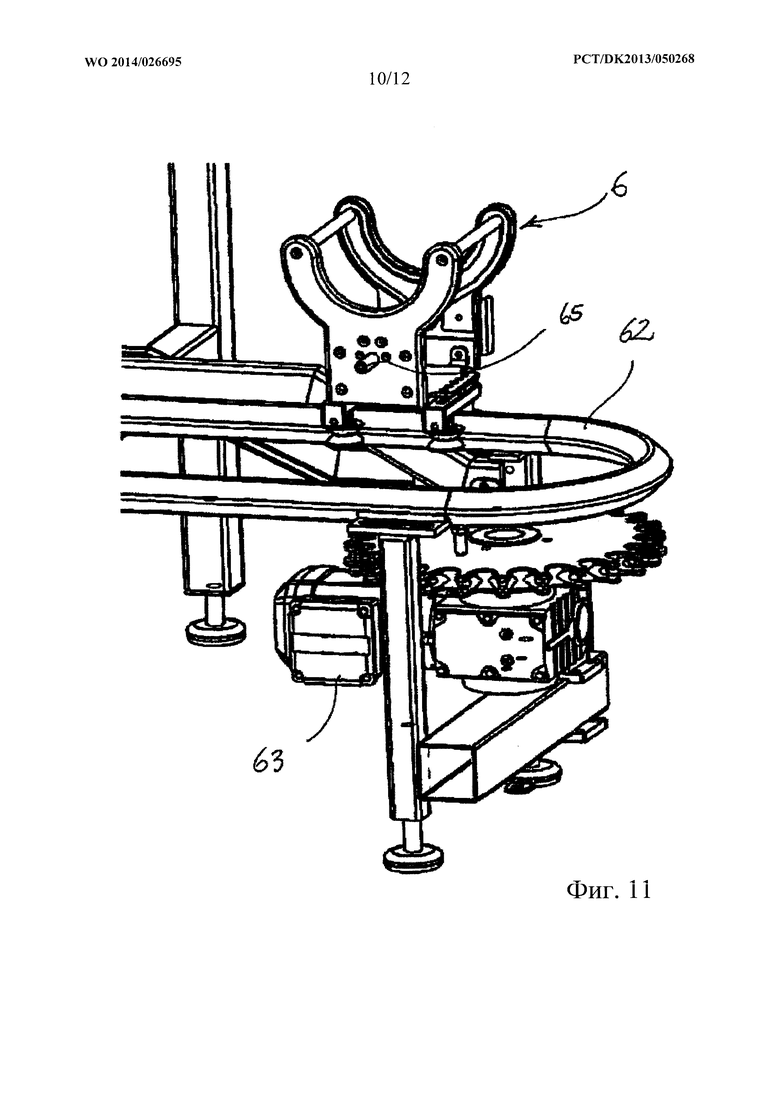
Начиная с фиг. 10, тело 10 птицы располагается в удерживающем приспособлении 6, в котором опорная поверхность выполнена в виде подвижной ленты 61, обеспечивающей птице возможность вращения до оптимального положения ног 13 перед началом процесса подвешивания как такового. В одном возможном варианте осуществления удерживающее приспособление располагается на системе 62 направляющих, как показано на фиг. 11, и тянется цепью (не показана), приводимой в движение двигателем 63. На фиг. 11 лента 61 и торцевая пластина 64 удерживающего приспособления не показаны, и следует понимать, что, хотя не показаны, ряд идентичных удерживающих приспособлений будет располагаться на системе направляющих, которая известна из многих других процессов убоя птицы. На другом участке системы направляющих (не показан) удерживающее приспособление может быть оснащено своим собственным двигателем, приводящим в действие вал 65 или центральный двигательный блок для вращения ленты 61.
Затем зацепной элемент 104 поднимается снизу, как показано стрелками на фиг. 12, так, чтобы он входил в зацепление с ногами в пяточных суставах 17 на стороне, обращенной к груди, между голенями 15 и плюснами 16, как показано на фиг. 13.
Зацепной элемент 104 выполнен здесь в виде изогнутого прута, изгибы которого способствуют позиционированию ног на расстоянии, соответствующем расстоянию между отверстиями в захватных приспособлениях 2, но несомненно можно использовать зацепной элемент с меньшими изгибами или без них.
Затем держатели 105 поворачиваются сверху, как показано стрелками на фиг. 13, в положение, показанное на фиг. 14, тем самым зажимая ноги между зацепным элементом и держателями и сгибая ноги, как показано на фиг. 15.
Следует отметить, что движение держателей 105 также может быть поступательным движением, или что они могут следовать сложной схеме, состоящей из сочетания поступательного и вращательного движения, и что это же применимо к движению зацепного элемента 104. Подобным образом, следует понимать, что нет необходимости в двух держателях, как показано на фиг. 10-14, и что зацепной элемент и держатели могут двигаться более или менее одновременно.
Также на фиг. 15 и 16 держатели 105 в этих вариантах осуществления содержат первую пластинчатую часть 1051, входящую в зацепление с пяточным суставом сверху и упирающуюся в сторону сустава, обращенную к спине, и вторую часть 1052 в форме прута, входящую в зацепление со стороной плюсны 16, обращенной к спине. Полученная в результате вогнутая форма держателя способствует сгибанию ног, но следует понимать, что другие формы двух частей и держателя как такового также могут приводить к удовлетворительному сгибанию. Например, первая часть также может быть выполнена из одного или нескольких прутьев.
Эксперименты показали, что угол сгибания α, показанный на фиг. 15, должен составлять по меньшей мере 30-40 градусов для достижения достаточного смыкания пальцев, и этот интервал угла несомненно применяется ко всем вариантам осуществления, независимо от того, каким образом достигается сгибание ноги.
Когда тело 10 птицы впоследствии освобождается из удерживающего приспособления 6, птица начинает висеть на зацепном элементе и держателе под действием силы притяжения, как показано на фиг. 16 и описано выше со ссылкой на другие варианты осуществления. Освобождение тела может, например, достигаться путем перемещения удерживающего приспособления 6 относительно птицы. При этом, при желании избежать использования относительно сложного удерживающего приспособления, изображенного на фиг. 10, также можно использовать подвижное зажимное устройство, перемещающееся параллельно ленточному конвейеру, несущему птицу, и позволять телу птицы падать с конвейера, как только ноги были зажаты, или за счет перехода края конвейера или за счет траектории зажимных устройств и удерживающих приспособлений, перемещающихся друг от друга. Подобным образом, следует понимать, что зацепной элемент может составлять часть опорной поверхности.
Как показано изогнутыми стрелками на фиг. 16, освобождение тела птицы приводит к вращению вокруг зацепного элемента 104, которое перемещает плюсны в по существу горизонтальное положение, и захватное приспособление 2 затем может быть перемещено поверх лап, как показано с помощью прямой стрелки на фиг. 16, или лапы могут быть перемещены в захватное приспособление. Как видно, первая часть 1051 держателя выполнена так, чтобы пяточный сустав не выходил из зацепления с ней во время вращения.
Следует также отметить, что хотя на фиг. 15-16 и не показано, вращение может вызывать движение пяточного сустава в направлении спины 12 и/или расширение коленного сустава 20, что может способствовать еще более плотному смыканию пальцев вместе. Такое движение пяточного сустава и/или расширение коленного сустава также может применяться к другим вариантам осуществления с подобным эффектом.
Чтобы минимизировать риск разрывов, при проектировании устройства и, в частности зажимного устройства, необходим тщательный учет прочности плюсен птиц, подлежащих обработке.
Как разъяснялось выше, движение птицы и устройства представляет собой относительное движение, что означает, что или птица, или устройство могут оставаться неподвижными, или, что оба могут двигаться для достижения относительных движений, возникающих в каждом из описанных вариантов осуществления.
Зацепные элементы и держатели предпочтительно выполнены из нержавеющей стали, так как этот материал известен как устойчивый к жестким условиям на бойнях, и его легко поддерживать в чистоте, но также могут быть использованы и другие материалы, включая полимеры и керамику.
Подвешивание птиц в сознании преимущественно может осуществляться в помещении без света или с его малым количеством, так как большинство птиц склонно оставаться неподвижными в темноте.
Группа изобретений относится к птицеперерабатывающей промышленности. Способ подвешивания птицы на захватном приспособлении включает следующую последовательность этапов: I) сгибание по меньшей мере одной ноги в пяточном суставе так, чтобы лапа приблизилась к груди птицы, II) вставку лапы ноги в захватное приспособление, III) по меньшей мере частичное освобождение по меньшей мере одной ноги. Сгибание может достигаться за счет расположения зацепного элемента на стороне ноги, обращенной к груди, чтобы препятствовать перемещению пяточного сустава в направлении груди птицы, и применения держателя для прижатия лапы в направлении груди. Зацепной элемент и/или держатель могут быть выполнены с возможностью смещения. Обеспечивается снижение риска неправильного захвата ног птицы, частично автоматизируется процесс подвешивания птиц на конвейере. 2 н. и 18 з.п. ф-лы, 16 ил. 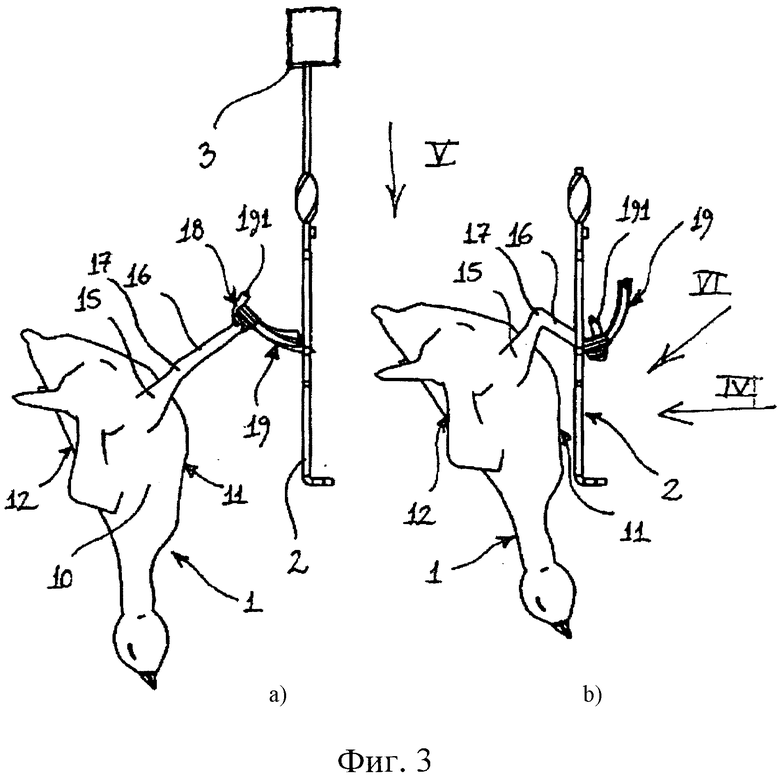
1. Способ подвешивания птицы, содержащей тело и две ноги, на захватном приспособлении, при этом указанное тело содержит грудь, и каждая нога содержит сторону, обращенную к груди, сторону, обращенную к спине, пяточный сустав, плюсну и лапу с пальцами, и при этом указанный способ включает следующую последовательность этапов:
I) сгибание по меньшей мере одной ноги в пяточном суставе так, чтобы лапа приблизилась к груди птицы,
II) вставку лапы ноги в захватное приспособление,
III) по меньшей мере частичное освобождение по меньшей мере одной ноги.
2. Способ по п. 1, отличающийся тем, что сгибание на этапе I) вызывает сведение пальцев лапы вместе.
3. Способ по п. 1, отличающийся тем, что обе ноги сгибают и вставляют в захватное приспособление.
4. Способ по п. 1, отличающийся тем, что во время этапа II) лапа/лапы проходят через одно или несколько отверстий в захватном приспособлении.
5. Способ по п. 1, отличающийся тем, что на этапе I) зацепной элемент располагают на стороне ноги, обращенной к груди, чтобы препятствовать перемещению пяточного сустава в направлении груди птицы, и держатель применяют для прижатия лапы к груди.
6. Способ по п. 5, отличающийся тем, что зацепной элемент располагают на пяточном суставе, и держатель подталкивает сторону плюсны, обращенную к спине.
7. Способ по п. 5, отличающийся тем, что один зацепной элемент и/или один держатель входят в зацепление с обеими ногами птицы.
8. Способ по п. 1, отличающийся тем, что тело птицы лежит на опоре и/или зафиксировано во время этапов I) и/или II).
9. Способ по любому из пп. 1-8, отличающийся тем, что птицу оглушают или умерщвляют перед этапом I).
10. Устройство для подвешивания птиц, содержащих тело и две ноги, на захватных приспособлениях, причем указанное тело содержит грудь, и каждая нога содержит сторону, обращенную к груди, сторону, обращенную к спине, пяточный сустав, плюсну и лапу с пальцами, и при этом указанное устройство содержит механизм для сгибания ног и позиционирующий механизм, причем указанный механизм для сгибания ног приспособлен для сгибания по меньшей мере одной ноги птицы в пяточном суставе так, чтобы лапа приближалась к груди птицы, и указанный позиционирующий механизм приспособлен для позиционирования ноги(ног) птицы с целью зацепления с захватным приспособлением с обеспечением возможности вставки по меньшей мере одной лапы в захватное приспособление.
11. Устройство по п. 10, отличающееся тем, что сгибающий механизм приспособлен для сгибания по меньшей мере одной ноги так, чтобы пальцы лапы сводились вместе.
12. Устройство по п. 10, отличающееся тем, что механизм для сгибания ног приспособлен для сгибания обеих ног птицы.
13. Устройство по п. 10, отличающееся тем, что механизм для сгибания ног содержит зацепной элемент и держатель, при этом указанный зацепной элемент приспособлен для зацепления ноги на ее стороне, обращенной к груди, чтобы препятствовать перемещению пяточного сустава в направлении груди птицы, и указанный держатель приспособлен для прижатия лапы в направлении груди.
14. Устройство по п. 13, отличающееся тем, что зацепной элемент приспособлен для зацепления ноги в пяточном суставе, и держатель приспособлен для подталкивания стороны плюсны, обращенной к спине.
15. Устройство по п. 13, отличающееся тем, что зацепной элемент и/или держатель выполнен с возможностью смещения.
16. Устройство по п. 13, отличающееся тем, что один зацепной элемент и/или один держатель приспособлен/приспособлены для входа в зацепление с обеими ногами птицы.
17. Устройство по п. 10, дополнительно содержащее опорную поверхность, приспособленную для опоры тела птицы, и/или крепление, приспособленное для фиксации тела птицы.
18. Устройство по любому из пп. 10-17, отличающееся тем, что механизм для сгибания ног содержит две непараллельные направляющие в форме прута, при этом первая направляющая служит в качестве зацепного элемента, а вторая направляющая служит в качестве держателя.
19. Устройство по любому из пп. 13-17, отличающееся тем, что зацепной элемент имеет форму прута с двумя изгибами, при этом указанные изгибы выполнены на расстоянии, соответствующем расстоянию между отверстиями в захватном приспособлении.
20. Устройство по любому из пп. 13-17, отличающееся тем, что держатель содержит первую часть, приспособленную для зацепления ноги в пяточном суставе, и вторую часть, приспособленную для зацепления плюсны, при этом указанные первая и вторая части придают держателю вогнутую форму.
| US 3643293 A, 22.02.1972 | |||
| US 2003134586 A1, 17.07.2003 | |||
| US 4660256 A, 28.04.1987.. |

