Настоящее изобретение относится к способу подвешивания птиц на подвесном конвейере, где ножки или лапки каждой из птиц расположены в захватном приспособлении на конвейере.
На многих птицебойнях по всему миру подвешивание птиц осуществляется вручную, а это значит, что оператор захватывает каждую птицу и размещает ее ножки или лапки в захватном приспособлении, при этом поддерживая вес тела птицы при помощи кистей или рук. Такая работа не только тяжела, но также осуществляется при пыльной и шумной окружающей обстановке, в частности, когда птицы перед подвешиванием не оглушены.
Были разработаны способы более или менее автоматического подвешивания птиц, один из примеров описан в предыдущей собственной заявке заявителя WO 2011/116774. Хотя данные устройство и способ из уровня техники имеют очевидные преимущества, рассматриваемые с точки зрения условий труда, все также необходимо предоставить альтернативный способ, который обеспечивает протекание процесса подвешивания еще более гладко, и при этом корректно подвешивается еще большее количество птиц, а также устройство, используемое в таком способе.
Это достигается при помощи способа, включающего следующую последовательность этапов, осуществляемую перед тем, как ножки или лапки размещаются в захватном приспособлении:
A) каждая птица располагается в держателе, при этом ее лапки и/или ножки выступают из первого отверстия в держателе, а ее шея находится на конце для шеи держателя,
B) определяется ориентация лапок и/или ножек,
C) птица поворачивается вокруг оси вращения, проходящей меду плоскостью, образованной первым отверстием держателя, и плоскостью, образованной концом для шеи держателя, пока не будет получена заданная ориентация лапок и/или ножек.
Более того, цель настоящего изобретения достигается при помощи устройства для подвешивания птиц на подвесном конвейере, содержащего несколько держателей, каждый из которых имеет конец для шеи, предназначенный для вмещения шеи птицы, и первое отверстие, из которого могут выступать лапки и/или ножки птицы, контрольную зону для определения ориентации лапок и/или ножек каждой птицы, а также вращательную зону для поворота птиц вокруг оси вращения, проходящей между плоскостью, образованной первым отверстием держателя, и плоскостью, образованной концом для шеи держателя. Контрольная и вращательная зоны могут быть скомбинированы, так что контроль и вращение осуществляются по существу в одном и том же месте.
Чтобы минимизировать пространство, необходимое для вращения, ось вращения предпочтительно проходит между первым отверстием держателя и концом для шеи держателя, и по возможности совпадает с осью симметрии держателя, однако она также может располагаться за пределами пространства, образованного держателем.
Предпочтительно держатели являются полыми, где полость по размеру практически соответствует телу птицы так, что держатель окружает тело. Это не только удерживает птиц от падения, когда держатель поворачивается, но также может способствовать удержанию птиц в спокойном состоянии, когда птицу обрабатывают в состоянии сознания, т.е. без оглушения.
Предпочтительно держатели являются открытыми на концах и имеют первое отверстие и второе отверстие на конце для шеи, через которое может выступать шея и/или голова птицы.
В одном предпочтительном варианте осуществления держатель является усеченным конусом, открытым на концах, где птица помещается шеей в торцевое отверстие, имеющее наименьший диаметр, а лапки и/или ножки выступают из торцевого отверстия, имеющего наибольший диаметр. Конус может быть непрерывным, например, выполненным из листового материала, или может иметь отверстия, как подробнее будет описано ниже, однако такие отверстия должны быть выполнены так, чтобы избежать повреждений птиц, особенно крыльев, во время введения в держатель и последующего опорожнения держателя.
Размещение птицы в держателе может осуществляться вручную и может быть осуществлено без поднятия птицы, например, посредством расположения птиц на несущей поверхности и далее посредством их затягивания в держатели по одной. При использовании держателя, открытого на концах, это может быть выполнено оператором, который пропускает свою руку через два отверстия держателя, захватывает голову, шею, лапки или ножки птицы и затем затягивает свою руку обратно. Альтернативно, держатель может иметь продольную прорезь, проходящая между двумя отверстиями и позволяющая пропускать руку оператора или шею или лапки птицы. Тогда оператор может добраться через держатель, захватить птицу и затянуть ее в держатель, пропуская свою руку или часть птицы через прорезь. Этот процесс также может быть автоматизирован, например, при помощи механической руки-манипулятора и системы наблюдения для распознавания соответствующей захватываемой части птицы. В этом случае предпочтительно затянуть птицу за ее голову, поскольку ее легко обнаружить и захватить как человеку-оператору, так и роботу, и поскольку затягивание затем происходит по направлению роста перьев, следовательно, сопротивление уменьшается.
Если необходимо поместить птиц в держатели без затягивания, то их можно, например, вываливать в держатели путем наклона несущей поверхности, на которую их предварительно поместили, но это требует относительно точного взаимного расположения птиц, несущей поверхности и держателя и будет работать только с птицами в бессознательном состоянии.
В частности, если обрабатывать птиц в сознании, неоглушенных, их можно вручную помещать в держатели, расположенные так, что ось вращения является практически вертикальной, при этом гравитация и природная склонность птиц лежать смирно при крепком сжатии, будет удерживать их на месте. Подобного результата можно достичь, когда держатели расположены так, что ось вращения наклонена, но тогда наклон не должен превышать 45 градусов от вертикального направления.
Оптимальная ориентация держателя во время расположения птицы будет зависеть от того, как птицы расположены в держателях, и позднее этапы обработки, такие как расположение ножек или лапок в захватных приспособлениях, могут требовать другого угла. Таким образом, целесообразным может быть держатель, выполненный с возможностью наклона. Во время вращения для установки лапок или ножек держатель может располагаться под любым необходимым до тех пор, пока вращение не приведет к выпаданию птицы из держателя. В конце процесса, когда птиц необходимо переместить к захватным приспособлениям, зачастую целесообразно располагать держатель так, чтобы ось вращения была горизонтальной или наклоненной более чем на 45 градусов от вертикального направления. Наклон держателя от более вертикального положения в направлении горизонтального может даже поспособствовать приведению лапок и/или ножек птицы в зацепление с захватными приспособлениями.
Вращение птицы может достигаться как посредством вращения держателя, так и посредством вращения птицы внутри держателя.
Вращение держателя во вращательной зоне может достигаться различными способами, включая выполнение мотора на каждом из держателей, однако, поскольку количество держателей обычно бывает очень большим и поскольку держатели должны быть способными выдерживать тщательную чистку, предпочтительной является внешняя вращательная зона. Держатель затем поворачивается посредством зацепления контактного элемента на держателе с элементом привода внешней вращательной зоны. Элемент привода, например, может быть шестерней, приводимой двигателем, зацепляющейся с изогнутой зубчатой рейкой на внешней поверхности держателя. Это очень простая и надежная система, требующая лишь небольшого технического обслуживания. Альтернативно вращение может быть вызвано путем установки держателей относительно неплотно и их перемещения через трущийся элемент. При зацеплении поверхности держателя с трущимся элементом держатель далее вынужден вращаться и контакт с трущимся элементом прерывается, когда держатель достигает нужного положения. Тем не менее, на трение может повлиять присутствие грязи и/или воды на контактных поверхностях, что потенциально ведет к отклонениям, и, следовательно, предпочтительно контролировать ориентацию лапок и/или ножек птицы во время или после вращения, чтобы обнаружить некорректное вращение и обеспечить дополнительное коррекционное вращение.
Если вместо этого выбрать вращение птицы внутри держателя, это также можно осуществить различными способами, однако в этом случае предпочтительно активировать внутреннюю поверхность держателя, которая находится в контакте с птицей для движения в перпендикулярном направлении, не пересекающем ось вращения. Когда трение между птицей и подвижной внутренней поверхностью достаточно высокое, это вызывает вращение птицы в держателе. Риск отклонения, являющегося следствием наличия грязи и/или воды на контактных поверхностях и коррекционные меры, описанные выше, также применимы в данном случае.
Не зависимо от способа осуществления вращения птицы, держатель может содержать две или более части, которые являются подвижными относительно друг друга, так чтобы держатель имел открытое положение, в котором части расположены на расстоянии друг от друга, и закрытое положение, в котором они приспособлены для зацепления птицы.
Внутренняя поверхность может быть выполнена как ремень, покрывающий внутреннюю поверхность держателя. В одном варианте осуществления ремень является непрерывным ремнем, пропущенным через прорезь, проходящую между первым и вторым отверстиями и покрывающим внешнюю сторону держателя, как подробнее будет описано далее со ссылкой на графические материалы. Ремни могут быть выполнены из листа, сетки или соединенных модулей и из резины, пластика или металла, поскольку они обеспечивают достаточное трение при контакте с птицей и их легко сохранять в чистоте. В качестве альтернатив ремням могут использоваться ролики или щетки.
Определение ориентации лапок и/или ножек в контрольной зоне может осуществляться вручную оператором или при помощи камеры или датчика. Следует отметить, что очень точное определение не обязательно, но что очень легко можно определить, что ориентация лапок и/или ножек все еще не является заданной ориентацией по этапу С). При использовании камеры или подобного оборудования визуальной идентификации, ориентация ножек и/или необходимое вращение могут быть вычислены посредством программы распознания изображения, запущенной на компьютере, и другое программное обеспечение может использоваться для обработки входного сигнала от датчиков других типов.
Держатели могут снабжаться маркерами для отслеживания их положения как по отношению к вращательной, так и к другим зонам.
Настоящее изобретение изначально выполнено с целью облегчения подвешивания птиц на захватном приспособлении перед убоем, и, следовательно, главным образом описано со ссылкой на птиц, имеющих голову и ножки. Тем не менее, сразу стало очевидным, что это также может использоваться в процессе убоя при отсекании головы и/или ножек. Таким образом, следует понимать, что когда ссылка дается на ножки или голову птицы, лапки или шея, соответственно, будут очевидной альтернативой в тех процессах, где голова и/или ножки предварительно были удалены.
Далее изобретение будет описано подробнее со ссылкой на графические материалы, на которых:
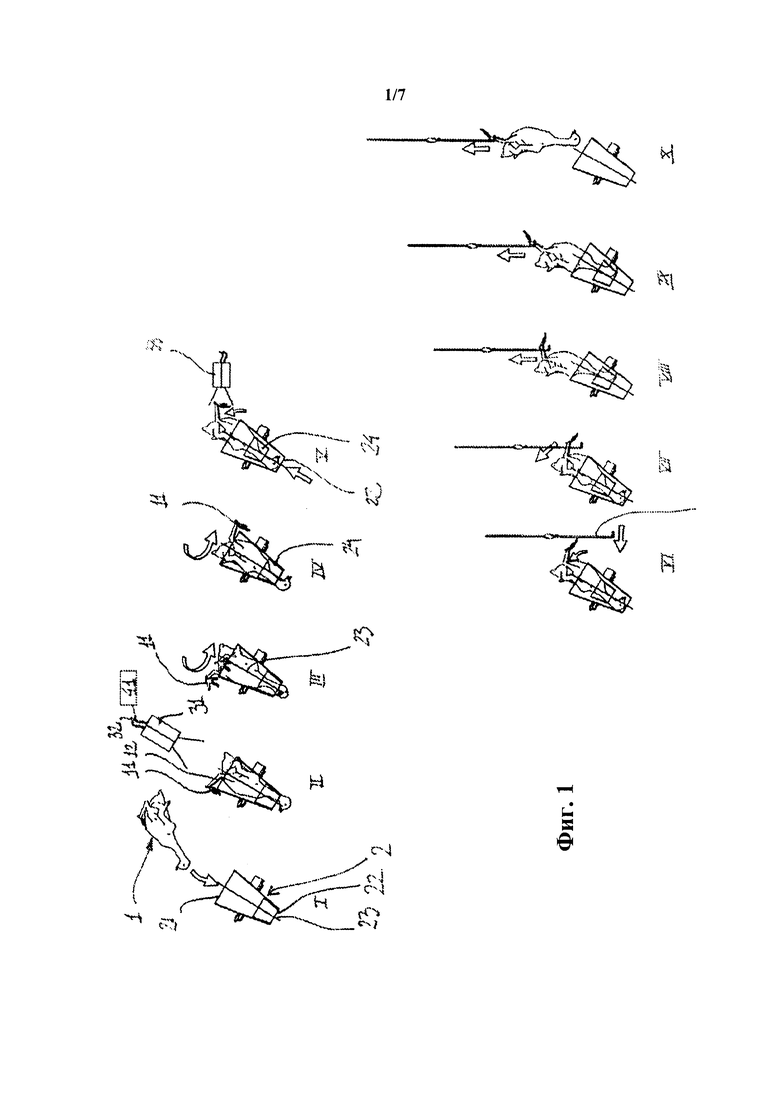
на фиг. 1 представлен ряд эскизов в виде сбоку, изображающий последовательность способа согласно настоящему изобретению,
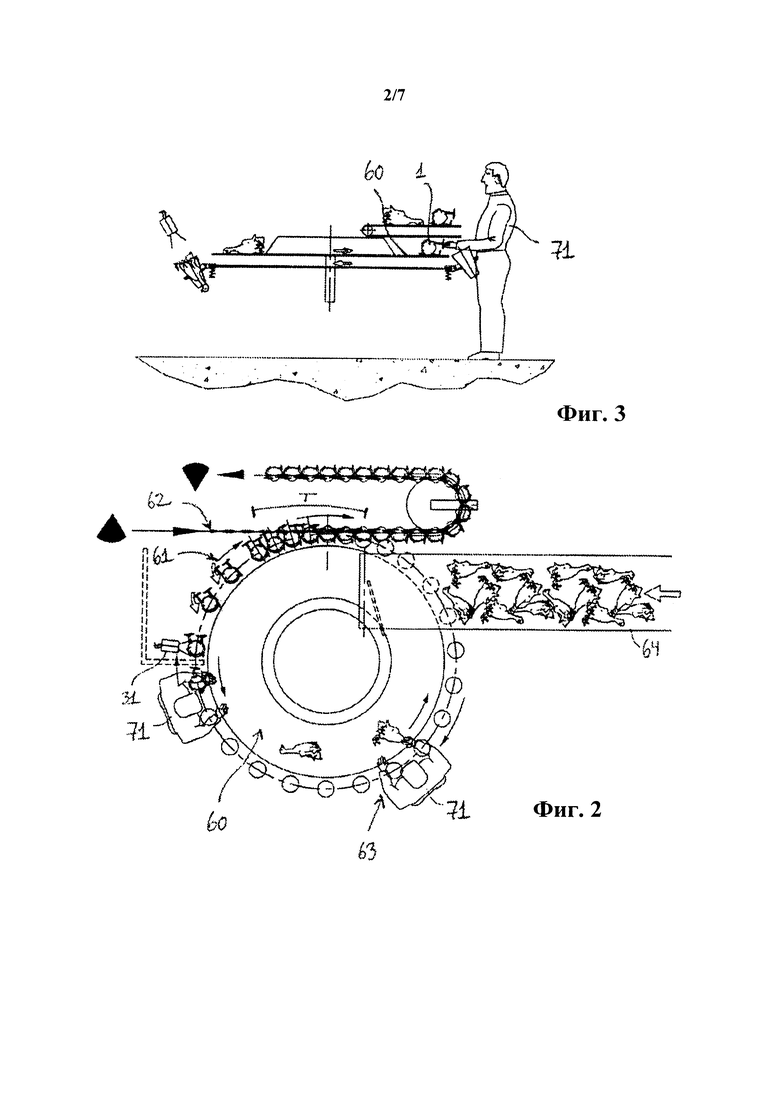
на фиг. 2 представлен схематический эскиз внешнего вида обрабатывающей системы для птиц изображенной сверху,
на фиг. 3 представлен схематический эскиз внешнего вида обрабатывающей системы для птиц, изображенной сбоку,
на фиг. 4-6 представлены эскизы, изображающие три различных варианта осуществления загрузочных зон для осуществления этапа А) способа согласно настоящему изобретению,
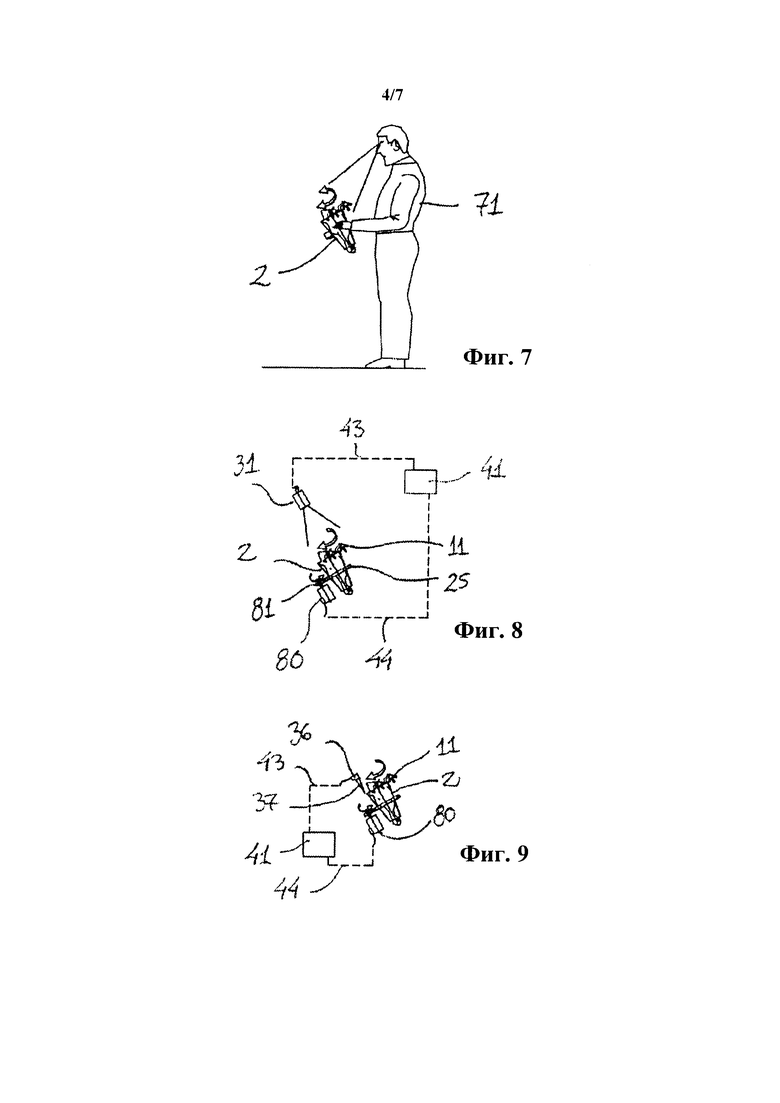
на фиг. 7-9 представлены эскизы трех различных вариантов осуществления объединяющих контрольную и вращательную зоны для осуществления этапов В) и С) способа согласно настоящему изобретению,
на фиг. 10-12 представлены эскизы трех различных вариантов осуществления перегрузочных зон для осуществления этапа D) способа согласно настоящему изобретению,
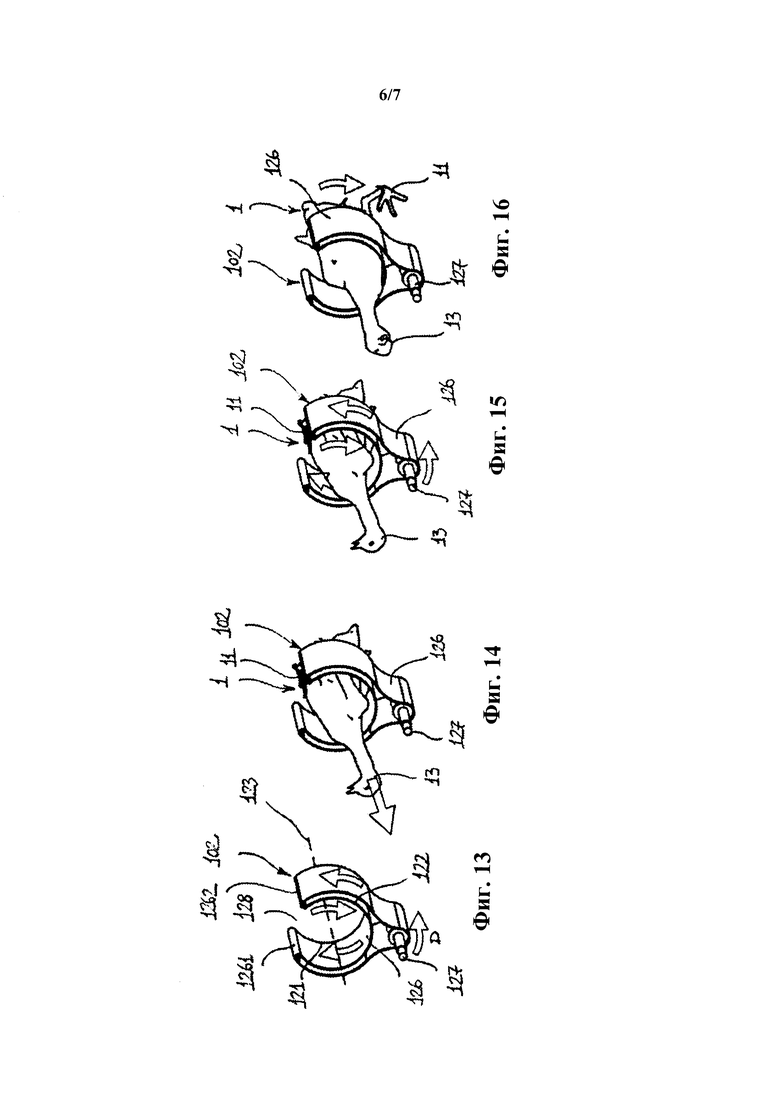
на фиг. 13 показан другой вариант осуществления держателя для птицы,
на фиг. 14-16 представлены эскизы, изображающие, как можно осуществить этапы А) и С) при помощи держателя по типу, показанному на фиг. 13, и
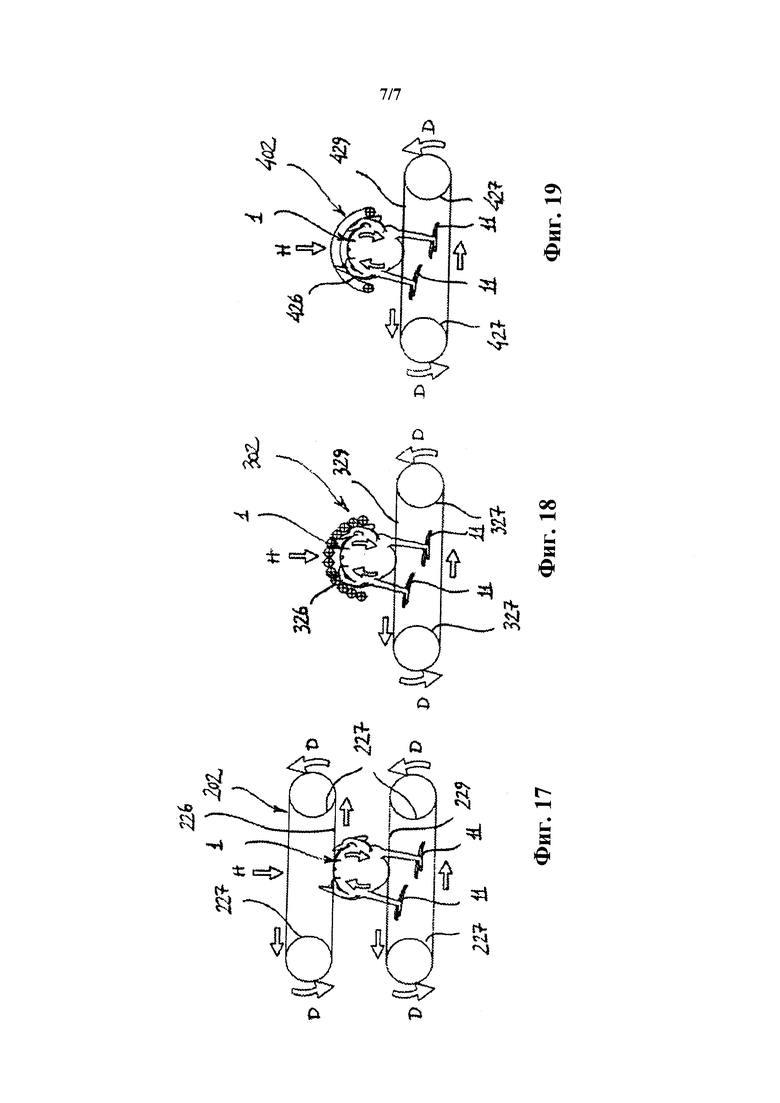
на фиг. 17-19 представлены принципиальные эскизы трех других типов вращательных зон.
Использование способа согласно настоящему изобретению для обработки куриц отображено посредством десяти эскизов I-X на фиг. 1, но следует понимать, что способ может применяться для других видов птиц, включающих уток, гусей, индюшек, фазанов или голубей, если размер держателей и другого технологического оборудования изменен соответственным образом. Следовательно, далее ссылка будет делаться на птиц.
На эскизе I птица 1 размещается в держателе 2, как показано стрелками и как будет объяснено ниже. Здесь держатель 2 имеет форму усеченного конуса с первым открытым концом 21, обращенным вверх, и вторым открытым концом 22 с меньшим диаметром, обращенным вниз. Как можно увидеть на эскизах II, III и IV, эта форма относительно хорошо соответствует форме птицы, однако следует понимать, что также могут использоваться другие формы при условии, что они обеспечивают хорошее удержание птицы. Одной альтернативой является цилиндр, который в равной степени легко изготовить, а значит дешево, однако потом необходимо будет закрыть второй конец, по меньшей мере частично, или расположить держатель горизонтально. Другой альтернативой является форма в виде бутылки, обеспечивающая плотную фиксацию в области плеч и шеи птицы, однако это делает держатели более дорогостоящими и более проблемными для очистки. Кроме того, очень плотная фиксация может усложнить доставание птицы обратно из держателя.
В этом случае предпочтительно выполнять держатели по фиг. 1 из листов нержавеющей стали, однако также могут использоваться и другие металлы и полимеры, а держатели в дополнение к торцевым отверстиям, описанным выше, могут иметь прорези, отверстия и перфорацию. Тем не менее, на фиг. 1 держатели изображены в виде простых конусов из прозрачного материала, так что легко можно увидеть относительную ориентацию птицы 1.
Кроме того, как можно увидеть на эскизах II, III и IV, размеры держателя 2 выполнены так, что ножки 11 и нижние лапки 12 птицы находятся над его верхним краем, т.е. выступают из первого отверстия 21, однако следует понимать, что природные различия в размере и форме тела птиц приводит к различиям в положении ножек.
На эскизе II ориентация ножек 11 птицы определяется при помощи камеры 31. Изображение с камеры может оцениваться вручную, но учитывая большое количество обрабатываемых птиц на современных птицебойнях для этой задачи предпочтительно использовать компьютерную программу распознавания изображения. Связь между камерой 31 и компьютером 41 может осуществляться через кабель 32 или бессетевое соединение.
Если ножки 11 птицы 1 находятся не в заданном положении, которое является оптимальным с точки зрения последующего подвешивания на захватном приспособлении 5, держатель 2 вращается вокруг продольной оси 23 держателя, проходящей между первым отверстием 21 и вторым отверстием 22, как показано стрелкой на эскизе III в положение на эскизе IV. Здесь ось вращения 23 совпадает с осью симметрии держателя, но это не обязательно должно быть так. В принципе, она может располагаться снаружи держателя, но в то же время проходить между плоскостями, определенными первым и вторым отверстиями. Кроме того, следует понимать, что не нужно поворачивать весь держатель, но что контактные поверхности или элементы, зацепляющиеся с птицей, могут использоваться для вращения птицы внутри держателя. Аналогично следует понимать, что такие контактные поверхности или элементы не должны образовывать часть держателя, но могут быть поверхностями или элементами отдельного вращательного устройства.
На эскизе V ошейник 24 поднят из своего исходного положения у второго отверстия 22, так что он приходит в зацепление с птицей и приподнимает ее слегка вверх. Это приводит к тому, что ножки 11 и лапки 12 птицы выдвигаются из первого отверстия 21 конуса 2, таким образом, предоставляя пространство для вставки захватного приспособления 5, как показано на эскизе VI. Если ошейник способен поворачиваться вокруг оси вращения, то он также может служить как внутренняя контактная поверхность держателя и использоваться для поворота птицы.
Кроме того, как показано на эскизе V, уровень ножек 11 и/или лапок 12 может определяться посредством камеры 33 и эта информация может использоваться для контроля подъемом ошейника 24, так что ножки всех птиц 1 располагаются на одной и той же высоте независимо от размера и формы тела. Тем не менее, следует понимать, что способ также может осуществляться без такого поднятия, что подъем помимо ошейника 24 может осуществляться посредством других средств, и что такой подъем может использоваться в сочетании с другими типами держателей. Подобные решения применяются для определения уровня лапок и/или ножек.
Эскизы VI, VII и VIII показывают, как птица 1 перемещается в захватное приспособление 5 посредством движения держателя 2 и захватного приспособления 5 относительно друг к другу. Такое относительное движение может достигаться любым подходящим образом, но в этом случае предпочтительно перемещать либо держатели, либо захватные приспособления вдоль криволинейной траектории, так чтобы они встречались на параллельном пути Т перегрузки, как показано на фиг. 2. Посредством расположения держателей и захватного приспособления на подходящих высотах по отношению друг к другу в перегрузочной зоне Т, такое криволинейное движение приводит к тому, что ножки 11 птицы 1 проходят через отверстия в захватном приспособлении и/или лапки располагаются над прорезями в них. Последовательное или одновременное движение вверх захватного приспособления 5, как показано в эскизах VI, VII и VII, приводит к тому, что птица 1 повисает на захватном приспособлении, как показано на эскизе IX, и, в конце концов, вынимается из держателя 2, как показано на эскизе X. Траектории двух конвейеров 61, 62 могут затем снова удаляться друг от друга, как показано на фиг. 2, при этом держатели возвращаются к загрузочной зоне 63 для следующего цикла, а захватные приспособления 5 с птицами, следуют к следующему процессу в птицебойне, как правило, в зону ошпаривания (не показано).
Кроме того, как можно увидеть на фиг. 2 и 3, здесь оглушенные птицы подаются на несущую поверхность 60 посредством ременного конвейера 64, который располагается на уровне выше несущей поверхности, однако следует понимать, что загрузочная зона 63 также может располагаться со стороны ременного конвейера 64. В этом варианте осуществления загрузочная зона изображена с двумя операторами 71, что значит, что каждый оператор должен лишь заполнять каждый второй держатель, но следует понимать, что количество операторов может варьировать, например, в зависимости от скорости вращения несущей поверхности 60 и веса птиц. Также следует указать, что в этом варианте осуществления расстояние между держателями варьирует с течением цикла процесса, так что расстояние относительно большое в загрузочной зоне 63, что дает операторам пространство и время для работы. При достижении перегрузочной зоны Т держатели накапливаются, так что расстояние между ними начинает соответствовать расстоянию между захватными приспособлениями 5 на конвейере 62 захватного приспособления. Для этой цели скорость вращения несущей поверхности выше, чем скорость конвейера захватного приспособления, при этом несущая поверхность, например, вращается со скоростью 0,5 м/с, а конвейер захватного приспособления движется со скоростью 0,25 м/с. Таким образом, можно обрабатывать 6000 птиц в час.
Загрузка птицы 1 в держатель 2, как показано в эскизе I на фиг. 1, может осуществляться различными способами, включающими ручное поднятие птиц и помещение их в держатель головой вниз. Тем не менее, с точки зрения условий труда необходимо избегать таких подъемов, и, таким образом, ручная загрузка предпочтительно должна осуществляться, например, как показано на фиг. 3 и 4, где оператор 71 захватывает птицу 1, лежащую на несущей поверхности 60, за голову и затягивает ее в держатель 2. Чтобы облегчить этот процесс, держатель сбоку может быть снабжен прорезью (не показано), дающей пространство для руки и/или кисти оператора. Прорезь не должна проходить вдоль всей длины от первого отверстия до второго отверстия, а должна проходить лишь настолько, насколько она облегчает работу оператора. На фиг. 1 и 3-12 держатели располагаются под углом приблизительно 30 градусов от вертикального направления, чтобы облегчить вкладывание птицы в держатель. Этот угол, тем не менее, может регулироваться для получения наилучшего возможного баланса между удобством манипулирования и осуществлением перемещения птицы в держатель под воздействием силы тяжести.
Такой ручной процесс может быть автоматизирован посредством предоставления механической руки-манипулятора 72, как показано в двух различных положениях на фиг. 5, по существу выполняющей ту же работу, что и рука оператора 71 на фиг. 3 и 4. Тем не менее, механической руке-манипулятору требуется информация о положении головы 13 птицы для того, чтобы позволить ее захват. Чтобы это решить, птицы 1 предварительно могут быть расположены в четко определенных положениях на несущей поверхности 60, однако, кроме того, может быть предусмотрена видеосистема 34, которая предоставляет эту информацию механической руке-манипулятору 72, возможно посредством компьютера.
Еще один вариант осуществления показан на фиг. 6, на которой всасывающая головка 73 захватывает голову 13 птицы 1, а затем затягивается обратно вниз через держатель 2. Всасывающая головка 73 и связанный с ней вакуумный шланг 74, тем не менее, также могут затягиваться через прорезь (не показано) сбоку держателя, как описано выше, и аналогично, следует понимать, что рука оператора 71 и механическая рука-манипулятор 72 могут пропускаться через держатель, как на фиг. 6. Как и в случае механической руки-манипулятора 72, получение точного указания положения головы 13 птицы с камеры 35 также оказывает благоприятное действие на всасывающую головку 73.
В вышеприведенном описании, ссылающемся на фиг. 3-6, различные способы размещения птицы в держателе все рассчитаны на захват птицы за голову, однако следует понимать, что если голова была предварительно удалена, альтернативно может захватываться шея. В этом случае программное обеспечение для распознавания изображения видеосистемы 34 несомненно должно быть приспособлено для распознавания шей вместо голов, и подобным образом должна быть подогнана конструкция всасывающей головки 73.
Несущая поверхность 60 на фиг. 4-6 может представлять собой линейный конвейер, проходящий мимо загрузочной зоны или круглой вращающейся распределяющей поверхностью, как показано на фиг. 2 и 3 и описано, например, в документе WO 2011/116774. Альтернативно, это может быть пластинчатый конвейер, оканчивающийся в загрузочной зоне, так что перемещение в держатель 2 является просто продолжением перемещения на конвейере.
В принципе вращение может осуществляться вручную, как показано на фиг. 7, оператором, поворачивающим держатель. Держатель затем предпочтительно размещается на пассивном креплении (не показано), например металлической петле на горизонтальном конвейере, однако также можно выполнить моторизированный вращающий механизм, как будет описано ниже, который может активироваться оператором 71. При ручном вращении, поворот держателя 2 вместо птицы 1 есть преимущество, заключающееся в том, что оператор никогда не соприкасается с птицей, тем самым сохраняя свои руки чистыми.
На фиг. 8 вращение автоматизировано при помощи камеры 31 для определения ориентации ножек 11, что также показано на эскизе II на фиг. 1, и двигатель 80 служит в качестве вращательной зоны для осуществления фактического вращения. Система контроля в виде компьютера 41, выполненная для обработки данных с камеры и отправки управляющих сигналов в двигатель посредством кабеля 32 или беспроводных соединений 43, 44, при этом указанные управляющие сигналы указывают, насколько необходимо повернуть держатель. Этот способ вращения также изображен на фиг. 2, где он показан в виде сверху.
В одном варианте осуществления, который может применяться к системе по фиг. 8, программа распознавания изображения определяет положение лапок и/или ножек и вычисляет необходимый угол вращения для придания лапкам и/или ножкам заданной ориентации. В другом варианте осуществления определяется положение хвоста птицы, которое имеет хорошо различимую особую взаимосвязь с лапками и ножками, и, таким образом, может использоваться для определения их ориентации, а еще в одном варианте осуществления камера располагается на конце для шеи держателя.
Фактическое вращение птицы может быть основано исключительно на вычислении угла вращения. В варианте осуществления по фиг. 8, усилие от двигателя 80 передается на держатель 2 посредством элемента привода в виде шестерни 81, которая зацепляется с зубчатой рейкой 25 на внешней стороне держателя, а точный угол вращения может быть получен посредством проворачивания определенного количества зубьев рейки. В других вариантах осуществления держатель снабжен физическими или электрическими маркерами позиционирования других типов, такими как магниты или электронные метки, и проворачивает определенное количество маркеров, соответствующих необходимому повороту. Датчик способен обнаруживать выбранный тип маркера, который может использоваться для определения перемещения.
В еще одном варианте осуществления птица или держатель поворачивается с известной скоростью вращения и в течение определенного времени соответствует необходимому вращению.
Если ножки 11 уже находятся в заданном положении, держатель просто не поворачивается.
Двигатель 80 на фиг. 8 и в подобных вариантах осуществления предпочтительно является электродвигателем и при использовании системы распознавания изображения для определения необходимого вращения, при этом двигатель предпочтительно способен работать в двух направлениях, так что вращение держателя никогда не должно быть более чем 180 градусов.
На фиг. 9 камера была заменена на фотоэлемент 36, обнаруживающий присутствие ножек 11 или лапок 12, когда луч 37 света прерывается, и нет необходимости в системе распознавания изображения. Хотя в данном документе ссылка делается на фотоэлемент, следует понимать, что, кроме того, могут использоваться и другие типы или датчики, такие как механические переключатели, индуктивные переключатели или подобные датчики.
Если фотоэлемент 36 или подобный датчик изначально не обнаруживает присутствие или ножку или лапку, то определяется, что лапки и/или ножки не находятся в заданном положении. Держатель 2 затем может просто поворачиваться, пока фотоэлемент не обнаружит ножки 11 или лапки 12, заданное положение будет внизу влево на фиг. 9. Если выполнены два фотоэлемента рядом друг с другом, чтобы позволить обнаружение обоих ножек или лапок, одного оборота будет достаточно для точного определения ориентации лапок и/или ножек. При использовании только одного датчика надежное определение положения птицы может быть определено посредством первого прокручивания, пока не будет определено присутствие ножки или лапки, затем вращения приблизительно на 180 градусов в том же направлении, чтобы убедиться, что обе лапки и/или ножки находятся на расстоянии от датчика, и затем вращают еще дальше в том же направлении, пока снова не будет определено появление ножки или лапки. Таким образом, можно различать ситуации, когда две лапки главным образом находятся по бокам от датчика, и когда обе лапки находятся с одной стороны от датчика, так что всегда, либо правая, либо левая ножка или лапка, будет останавливаться у датчика.
Датчик 80 и другие средства вращения, а также системы контроля 41, 43, 44 на фиг. 9 такие же, как на фиг. 8.
Различные варианты, описанные выше, для определения исходной ориентации лапок и/или ножек и для определения того, когда была достигнута заданная ориентация, применяются независимо от конструкции держатели, это угол наклона и др. и, таким образом, также в вариантах осуществления описанных ниже, а также других вариантах осуществления, подпадающих под объем формулы изобретения.
На фиг. 8 и 9 шестерня двигателя 80 зацепляется с зубчатой рейкой, однако при использовании системы, основанной на трении и/или вращении птицы внутри держателя, зацепление между контактными поверхностями может, например, подвергнуться воздействию влаги. Следовательно, может быть предпочтительным определение положения птицы и/или держателя по меньшей мере один раз во время и/или после вращения. Например, это может быть осуществлено посредством определения положения лапок и/или ножек при помощи программы распознавания изображения, описанной выше. Другой или дополнительный вариант заключается в выполнении маркера на держателе и определении положения этого маркера в отношении к ножкам и/или лапкам до и после вращения, тем самым определяется любая возможность во взаимном расположении между птицей и соответствующей частью держателя.
В вышеприведенном описании, ссылающемся на фиг. 7-9, различные способы вращения птицы, все основываются на том, что держатель поворачивается, однако следует понимать, что способы определения ориентации лапок и/или ножек также относятся к способам, в которых птица поворачивается внутри держателя. Аналогично, хотя птицы на фиг. 7-9 все показаны с ножками, описанные способы также могут использоваться, когда ножки предварительно были удалены. В этом случае программное обеспечение для распознавания изображения, запускаемое на компьютере 41, обязательно должно быть приспособлено для распознания лапок вместо ножек, и аналогично тип и/или положение датчика(датчиков) 36 должно быть приспособлено для распознавания лапок.
Перемещение птицы 1 с держателя 2 на захватное приспособление 5 также может осуществляться вручную оператором 71, располагающим захватное приспособление точно на ножках 11, как показано на фиг. 10.
Подобные способы, когда птица автоматически вынимается из держателей других типов, уже были разработаны. Поэтому специалисту в данной области будет понятно, как определять схему относительного движения между держателями 2 и захватными приспособлениями 5, необходимую для осуществления перемещения, показанного на фиг. 11. В противоположность тому, что было описано, со ссылкой на фиг. 2, держатели 2 здесь следуют по прямому пути, в то время как конвейер захватного приспособления поворачивается в точке перемещения, как указано пунктирными линиями и стрелками, однако возникающее относительное движение по существу то же самое.
Еще в одном варианте осуществления, показанном на фиг. 12, где птица 1 вынимается из держателя 2 посредством перегрузочного механизма 9 карусельного типа и с него перемещается на захватные приспособления 5. Такие карусели 9 для перемещений между линиями конвейера хорошо известны, и поэтому подробно описываться здесь не будут, однако следует указать, что перемещение из держателя 2 на карусель 9 предпочтительно включает движение держателя вниз, при этом карусель удерживается по существу на постоянном уровне.
Выше настоящее изобретение было описано со ссылкой на держатели, имеющие форму усеченного конуса, открытого на концах. На фиг. 13-19 показаны различные варианты осуществления держателей, приспособленных для вращения птицы, в то время как держатель остается по существу неподвижным. На этих фигурах подобные ссылочные позиции, как на фиг. 1-12, используются для признаков, которые по существу подобны, однако на фиг. 13-16 к ним добавляется 100, на фиг. 17 - добавляется 200, на фиг. 18 - добавляется 300, а на фиг. 19 - добавляется 400. Там, где более ничего не объясняется, эти признаки имеют такую же конструкцию и функции, как было описано со ссылкой на фиг. 1-12. Также следует понимать, что там, где более ничего не указано, способы расположения птиц в держателях и для перемещения их в захватные приспособления, описанные выше со ссылкой на фиг. 1-12 также могут использоваться с этими различными держателями.
На фиг. 13 показан вариант осуществления держателя 102, сформированный из непрерывного ремня 126, и в котором первое и второе отверстия 121, 122 по существу имеют одинаковый диаметр, что придает держателю цилиндрическую форму. Ремень располагается в виде двух петель, внутренней петли, образующей внутреннюю сторону держателя, и внешней петли, образующей внешнюю сторону, при этом все сегменты внутренней петли расположены на расстоянии от оси вращения. Приводной вал 127 расположен между ними и находится в контакте с внешней петлей.
Линии 1261, 1262 поворота, где встречаются две петли, предпочтительно образованы посредством вращающихся роликов (не показано), а прорезь 128, позволяющая манипулирование с птицей, как описано выше со ссылкой на фиг. 4-6, образована между линиями поворота. Здесь прорезь составляет приблизительно одну пятую от окружности цилиндрической формы, образованной держателем, однако следует понимать, что она может быть шире или уже.
При вращении приводного вала 127, как показано стрелкой D, ремень будет вращаться в перпендикулярном направлении, не пересекающем ось вращения, как показано другими стрелками на фиг. 13, тем самым вызывая вращение внутренней петли вокруг оси 123 вращения. Как описано со ссылкой на держатели по фиг. 8 и 9, каждый держатель в принципе может быть снабжен собственным двигателем, однако в этом случае предпочтительно, чтобы приводной вал приводился в зацепление внешним приводным устройством по достижении вращательной зоны.
Обращаясь теперь к фиг. 14, птица 1 вставляется в держатель 102, как указано стрелкой, так чтобы держатель по существу полностью окружал птицу. Этот держатель расположен так, что ось 123 вращения находится по существу горизонтально, чтобы избежать выскальзывания птицы из держателя под воздействием центра тяжести, однако следует понимать, что могут предоставляться средства для изменения угла держателя, как описано выше, например, чтобы облегчить перегрузку на захватное приспособление.
Когда ориентация лапок и/или ножек птицы определена и обнаружено, что она не находится в заданной ориентации, готовой для захвата, птица поворачивается, как показано стрелками на фиг. 15 и 16. Чтобы убедиться, что птица движется вместе с ремнем, а не просто проскальзывает, контактная поверхность ремня, обращенная к птице, выполнена с относительно высоким коэффициентом трения, однако он не должен быть настолько высоким, что становится сложным направление птицы в и из держателя. Точные свойства ремня будут зависеть от используемого материала, типа обрабатываемых птиц, температуры и других факторов, однако легко определяется при помощи нескольких экспериментов.
На фиг. 17-19 изображены еще трех других способов для вращения птиц во вращательной зоне. Во всех этих вариантах осуществления птица 1 располагается по существу на плоской несущей поверхности 229, 329, 429, которая служит в качестве первой части держателя, и вторая часть 226, 326, 426 держателя приводится в контакт с птицей путем опускания в ее направлении, как показано стрелками Н. Тем не менее, того же эффекта также можно добиться посредством поднятия несущей поверхности 229, 329, 429 в направлении второй части 226, 326, 426 держателя или путем перемещения их обеих в направлении друг к другу. Первая и вторая части держателя вместе образуют держатель 202, 302, 402, используемый для вращения птицы.
На фиг. 17 обе части 226, 229 держателя выполнены, как непрерывные ремни, где к приводному механизму присоединен по меньшей мере один вращающийся ролик 227, что может быть использовано для вращения ролика, как показано стрелками D, тем самым приводя ремень в движение, что также показано стрелками. Если трение между птицей и по меньшей мере одним из ремней 226, 229 достаточно высоко, движение ремней вызывает вращение птицы, как показано стрелками. Необходимое трение можно получить посредством подгонки характеристик поверхности ремня, как было описано со ссылкой на фиг. 13-16, и/или посредством настройки контактного давления ремня на птицу. Тем не менее, в последнем случае, чтобы избежать повреждения птицы, необходимо проявить особую осторожность.
Здесь оба ремня 226, 229 изображены, как вращающиеся в одном и том же направлении, но это не обязательно должно быть так. Один из них может быть пассивным, как неподвижный или свободно перемещающийся под воздействием трения, или перемещающимся в противоположном направлении, что позволяет птице останавливаться в очень точном положении. Тип ремней, описанный со ссылкой на фиг. 13-16, также может здесь использоваться. Кроме того, следует указать, что ремень 229, а также ремни 329 и 429, которые будут описаны ниже, могут быть частью конвейера, перемещающего птиц из загрузочной зоны в зону захватывания, и поэтому могут быть значительно длиннее, чем показано в графических материалах.
На фиг. 18 вторая часть 326 держателя образована посредством ряда роликов, расположенных в полукруглой конфигурации, охватывающей тело птицы. Ролики могут быть простыми цилиндрами по существу с непрерывной поверхностью, однако они могут быть выполнены в виде щеток, и различные виды роликов могут объединяться.
Когда ремень 329, образующий первую часть держателя, приводится в движение, птица поворачивается, как изображено стрелками и ролики 326 двигаются под воздействием трения, тем самым предотвращается повреждение птицы. Тем не менее, один или несколько из роликов второй части держателя 326 также может приводиться в движение, тем самым способствуя вращению птицы, как описано выше со ссылкой на фиг. 17.
Вариант осуществления по фиг. 19 соответствует варианту осуществления по фиг. 18, за исключением того, что второй держатель 426 является изогнутым ремнем. Как было описано со ссылкой на фиг. 17 и 18, ремень также может приводиться в движение в одном или другом направлении, и потому может быть выполнен, как описано со ссылкой на фиг. 13-16, этот вариант осуществления в принципе соответствует комбинации вариантов осуществления по фиг. 13 и 17. Хотя и показано, что изогнутый ремень 426 находится сверху, а прямой ремень 429 снизу птицы, следует понимать, что также все может быть наоборот, так что изогнутый ремень 426 образует ложе для птицы в точности как держатель 102 на фиг. 13-16. То же самое касается и варианта осуществления по фиг. 18.
Как и на фиг. 13-16, варианты осуществления на фиг. 17-19 изображены по существу горизонтальными, однако в принципе располагать их наклоненными или даже с вертикальной осью вращения, посредством наклона первого и второго держателей в отношении друг к другу, так чтобы пространство между ними оставалось клиновидным. В варианте осуществления на фиг. 18 подобного эффекта можно добиться посредством наклона отдельных роликов в отношении друг к другу, тем самым образуя коническую форму, как описано для держателей на фиг. 1-12.
Варианты осуществления на фиг. 17-19 также могут быть выполнены с наклоном или с одной или несколькими наклоненными секциями конвейера, так что угол может изменяться в связи с птицами, расположенными в держателях и/или перемещенными в захватные приспособления.
Выше настоящее изобретение было описано с учетом обработки птиц в сознании или оглушенных перед обезглавливанием, однако следует понимать, что способ и устройство в принципе могут быть использованы и позже в процессе убоя. Аналогично следует понимать, что изобретение также может использоваться для птиц, у которых предварительно были удалены ножки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ подвешивания птицы на захватном приспособлении и устройство для подвешивания птиц | 2013 |
|
RU2606907C2 |
| УСТРОЙСТВО ДЛЯ ПОДВЕШИВАНИЯ | 2010 |
|
RU2506651C2 |
| Направляющий элемент, направляющий узел, система и способ разделения набора внутренних органов, извлеченных из забитой домашней птицы | 2014 |
|
RU2653079C1 |
| СПОСОБ ПОДАЧИ ЖИВОЙ ПТИЦЫ НА ПОДВЕСНЫЕ ПУТИ | 2003 |
|
RU2274001C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПТИЦ НА КОНВЕЙЕРЕ | 2013 |
|
RU2601051C1 |
| Инструмент для управления регулируемым элементом регулируемой по высоте ножки предмета меблировки | 2021 |
|
RU2840394C1 |
| ПОТОЛОЧНАЯ СИСТЕМА | 2015 |
|
RU2654916C1 |
| Конвейерная линия и держатель для тушки домашней птицы, применяемый в этой линии | 2016 |
|
RU2639333C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ИНЖЕКТОРОВ ДЛИННОМЕРНЫХ ТРУБ | 2010 |
|
RU2522357C2 |
| Конвейер для транспортирования битой домашней птицы | 1985 |
|
SU1371498A3 |


Группа изобретений предназначена для использования в птицеперерабатывающей промышленности, а именно для подвешивания птиц. Способ подвешивания птиц на подвесном конвейере включает следующую последовательность этапов: А) каждую птицу располагают в держателе, при этом ее лапки и/или ножки выступают из первого отверстия в держателе, а ее шея находится на конце для шеи, В) определяют ориентацию лапок и/или ножек, С) птицу поворачивают вокруг оси вращения, проходящей между первым отверстием и концом для шеи, пока не будет получена заданная ориентация лапок и/или ножек, и D) лапки и/или ножки птицы размещают в захватном приспособлении на конвейере. Вращение может достигаться как посредством вращения держателя, так и посредством вращения птицы внутри держателя. В устройстве для осуществления этапов В) и С) выполнены контрольная зона и вращательная зона. Держатели предпочтительно открыты на концах, при этом второе отверстие находится на конце для шеи. Обеспечивается более гладкое протекание процесса подвешивания птиц на конвейере. 2 н. и 14 з.п. ф-лы, 19 ил.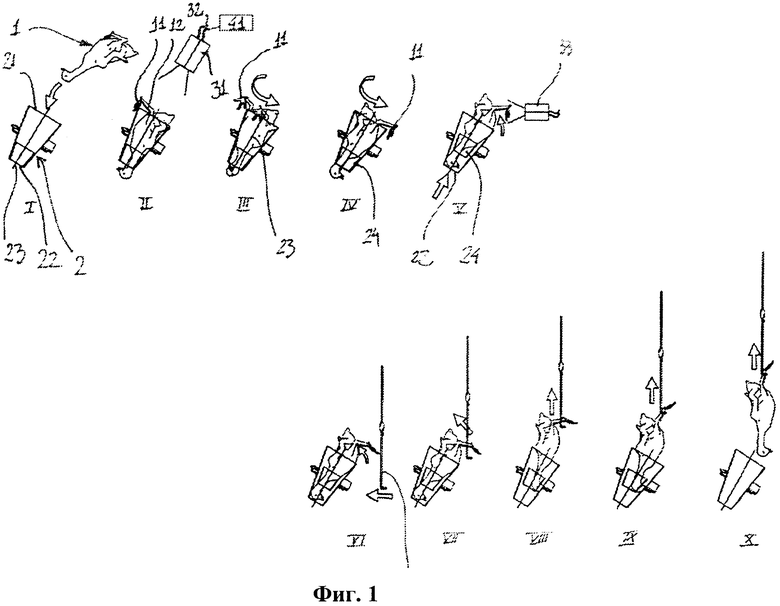
1. Способ подвешивания птиц, имеющих тело, шею, лапки и возможно голову и ножки, на подвесном конвейере, включающий следующую последовательность этапов:
A) каждую птицу располагают в держателе, при этом ее лапки и/или ножки выступают из первого отверстия в держателе, а ее шея находится на конце для шеи держателя,
B) определяют ориентацию лапок и/или ножек,
C) птицу поворачивают вокруг оси вращения, проходящей между плоскостью, образованной первым отверстием держателя, и плоскостью, образованной концом для шеи держателя, пока не будет получена заданная ориентация лапок и/или ножек, и
D) лапки и/или ножки птицы размещают в захватном приспособлении на конвейере.
2. Способ по п. 1, отличающийся тем, что держатель имеет второе отверстие на конце для шеи, и при этом на этапе А) птицу размещают ее лапками и/или ножками в первом отверстии, а ее шеей - во втором отверстии.
3. Способ по п. 1 или 2, отличающийся тем, что на этапе А) птицу затягивают в держатель, предпочтительно за ее голову и/или шею.
4. Способ по п. 1 или 2, отличающийся тем, что перед этапом А) птица лежит на несущей поверхности.
5. Способ по п. 1 или 2, отличающийся тем, что во время этапа А) держатель расположен так, что ось вращения является по существу вертикальной или наклоненной под углом, не превышающим 45 градусов от вертикальной плоскости.
6. Способ по п. 1 или 2, отличающийся тем, что после этапа А) держатель наклоняют так, что угол оси вращения по отношению к вертикальной плоскости меняется.
7. Способ по п. 1 или 2, отличающийся тем, что держатель поворачивают посредством приведения в зацепление с элементом привода внешнего приводного устройства.
8. Способ по п. 1 или 2, отличающийся тем, что внутреннюю поверхность держателя, которая находится в контакте с птицей после завершения этапа А) и расположена на расстоянии от оси вращения, перемещают в направлении, перпендикулярном оси вращения, во время этапа С), что вызывает вращение птицы.
9. Способ по п. 1 или 2, отличающийся тем, что на этапе В) используют камеру для определения ориентации ножек и/или ориентации лапок, и при этом вращение птицы, которое должны выполнять на этапе С), вычисляют посредством компьютера.
10. Устройство для подвешивания птиц, имеющих тело, шею, лапки и возможно голову и ножки, на подвесном конвейере, содержащее:
несколько держателей, каждый из которых имеет конец для шеи, предназначенный для вмещения шеи птицы, и первое отверстие, из которого могут выступать лапки и/или ножки птицы,
контрольную зону для определения ориентации лапок и/или ножек каждой птицы, и
вращательную зону для поворота птицы вокруг оси вращения, проходящей между плоскостью, образованной первым отверстием держателя, и плоскостью, образованной концом для шеи держателя.
11. Устройство по п. 10, отличающееся тем, что держатели являются полыми, при этом по размеру полость по существу соответствует телу обрабатываемых птиц, при этом указанные держатели предпочтительно имеют первое отверстие и второе отверстие на конце для шеи.
12. Устройство по п. 11, отличающееся тем, что первое отверстие имеет диаметр больше, чем у второго отверстия, так что держатель имеет форму усеченного конуса, открытого на концах.
13. Устройство по любому из пп. 10-12, отличающееся тем, что держатели выполнены из листового материала, предпочтительно из нержавеющей стали или полимера.
14. Устройство по любому из пп. 11-12, отличающееся тем, что каждый держатель имеет продольную прорезь, проходящую между первым отверстием и вторым отверстием.
15. Устройство по любому из пп. 10-12, отличающееся тем, что каждый держатель содержит внутреннюю контактную поверхность, которая расположена на расстоянии от оси вращения и выполнена с возможностью перемещения в поперечном направлении к оси вращения, и которая предназначена для того, чтобы контактировать с внешней поверхностью птицы, так чтобы движение внутренней контактной поверхности вызывало вращение птицы.
16. Устройство по п. 15, отличающееся тем, что внутренняя контактная поверхность держателя является ремнем, предпочтительно выполненным из листа, сетки или соединенных модулей и из резины, пластика или металла.
| СПОСОБ ПОДГОТОВКИ КАРТОФЕЛЯ ПЕРЕД ЗАКЛАДКОЙ НА ХРАНЕНИЕ | 2002 |
|
RU2253218C2 |
| US 2011136422 A1, 09.06.2011 | |||
| WO 2011116774 A1, 29.09.2011. | |||

