ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] По данной заявке испрашивается приоритет предварительной патентной заявки США № 61/608,300 поданной 8 марта 2012 г., которая, таким образом, включена в настоящее описание посредством ссылки в полном объеме.
ОБЛАСТЬ ТЕХНИКИ
[0002] Изобретение относится в целом к лучевой терапии. В частности изобретение относится к гарантии механического и дозиметрического качества в лучевой терапии.
УРОВЕНЬ ТЕХНИКИ
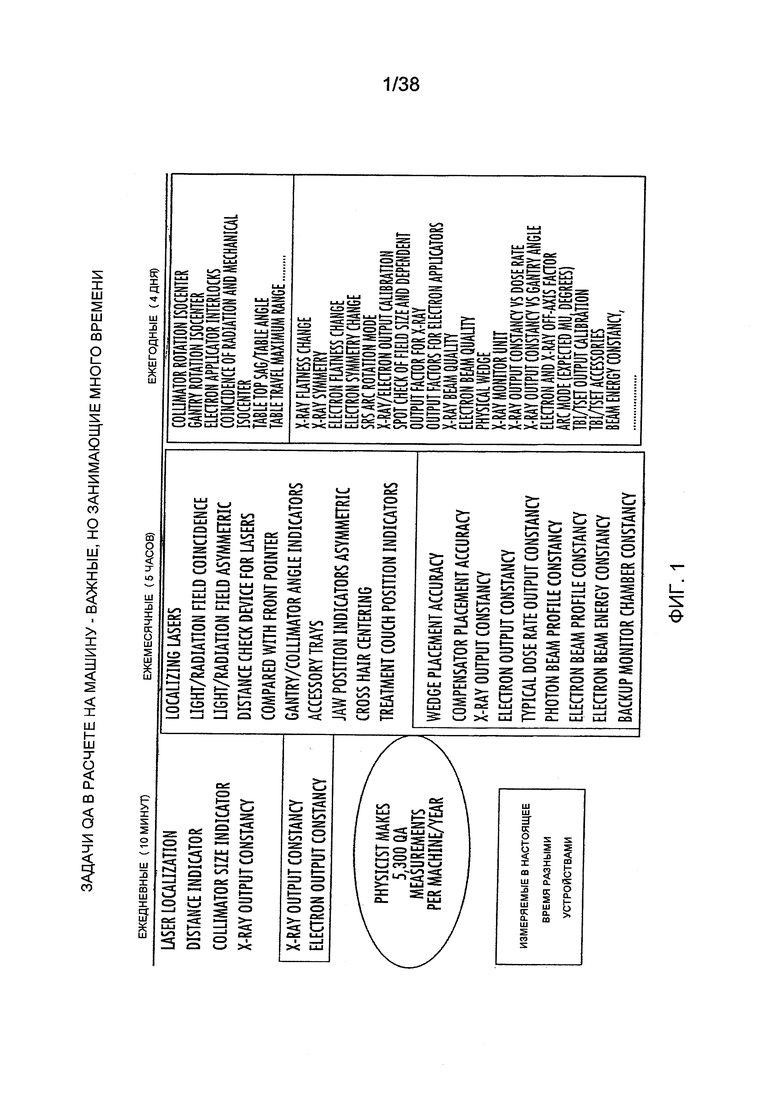
[0003] Медицинские ускорители используются для лучевой терапии раковых пациентов и испускания излучения в пределах 360°. Пациент лежит на платформе, в то время как головка устройства вращается вокруг тела пациента. Гарантия качества (QA) целостности медицинских ускорителей играет важнейшую роль в обеспечении безопасной доставки лучевой терапии. Двумя основными критериями, используемыми для QA, является воспроизводимость излучения и механическая целостность машины. Задачи QA, в частности, состоят в количественной оценке точности и прецизионности механических движений ускорителей, различных оптических индикаторов и доставляемой дозиметрии. Фиг. 1 демонстрирует таблицу задач QA для каждого медицинского ускорителя, которые необходимо осуществлять ежедневно, ежемесячно и ежегодно.
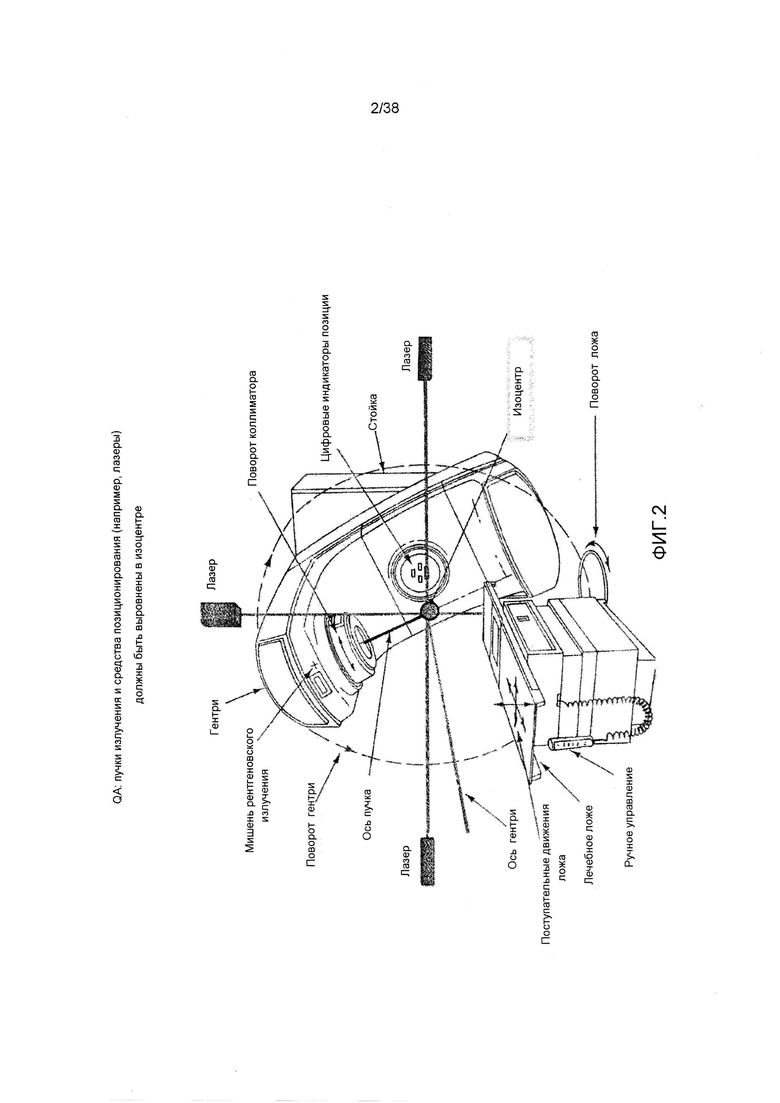
[0004] Фиг. 2 демонстрирует вид спереди медицинского ускорителя, используемого для лучевой терапии. Согласно фиг. 2 одна задача QA состоит в обеспечении выравнивания пучков излучения вдоль оси и вспомогательных средств позиционирования в форме лазерных пучков в изоцентре медицинского ускорителя. QA этого выравнивания важна для того, чтобы удостовериться в том, что пучки излучения вдоль оси 1 позволяют точно лечить пациента, не вызывая ожогов или других нежелательных побочных эффектов.
[0005] В настоящее время почти все задачи QA, перечисленные на фиг. 1, осуществляются разными аппаратами. Механические и оптические компоненты обследуются визуально, при этом данные не поддаются документированию. Например, специалист проверяет источник света, направляя источник на ложе для пациента и вращая его, чтобы удостовериться в том, что он перемещается относительно изоцентра медицинского ускорителя. Дозиметрия измеряется различными ионизационными детекторами, при этом наиболее популярной является двухмерная матрица дискретных детекторов. Измерения более высокого разрешения измеряются с помощью пленок, где процесс преобразования данных может быть трудоемким. Некоторые из этих задач осуществляются на ежедневной, ежемесячной или ежегодной основе, и их осуществление может занимать несколько часов. Например, в то время как ежедневное техобслуживание занимает лишь приблизительно 10 мин, ежемесячное техобслуживание таких машин для тестирования выхода и механической целостности машины обычно занимает 5-6 ч, и результаты тестирования частично документируются. Фактически, ежегодное техобслуживание на машине может занимать приблизительно 4 дня.
[0006] Соответственно в уровне техники существует необходимость в приборе, которое обеспечивает более быстрое и более точное измерение QA целостности медицинских ускорителей. Кроме того, в уровне техники существует необходимость в едином приборе, который измеряет как механические, так и дозиметрические задачи QA и вырабатывает документируемые результаты, касающиеся измерений QA.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Согласно первому аспекту изобретения прибор для унификации измерений гарантии механического и дозиметрического качества в реальном времени в лучевой терапии включает в себя поверхность формирования изображения для приема множественных источников энергии. Поверхность формирования изображения позиционируется в одной плоскости с изоцентром медицинского ускорителя. Прибор включает в себя камеру для измерения и регистрации данных, связанных с множественными источниками энергии. Дополнительно прибор включает в себя систему зеркал для направления множественных источников энергии в камеру. Система зеркал также выполнена с возможностью поддержания плоскости формирования изображения камеры в изоцентре медицинского ускорителя.
[0008] В соответствии с аспектом изобретения камера стационарна и позиционирована на одной оси с плоскостью формирования изображения. Компьютерная система включена для сбора и анализа данных. Компьютерная система может включать в себя контур обратной связи для автоматического управления прибором. Измерения производятся в реальном времени. Система зеркал не включает в себя ни одного зеркала или включает в себя одно или более зеркал для направления источников энергии в камеру. Если зеркала используются, зеркала могут быть фиксированными или подвижными. Дополнительно поверхность формирования изображения способна вращаться относительно оси камеры. Единый фосфорный люминесцентный экран или лист пластикового сцинтиллятора используется для приема множественных источников энергии из рентгеновских, электронных, световых и лазерных пучков. Люминесцентный экран или лист пластикового сцинтиллятора включают в себя метки для пространственной калибровки.
[0009] В соответствии с другим аспектом изобретения система зеркал способна вращаться для захвата данных при разных углах гентри. Прибор может быть запрограммирован перемещаться синхронно с механическими компонентами медицинского ускорителя относительно изоцентра. Камера может принимать форму традиционной камеры. В таком случае зеркало выполнено с возможностью защищать камеру от излучения. Альтернативно, камера принимает форму камеры, устойчивой к излучению. Камера также может принимать форму плоскопанельного детектора. Вычислительное устройство может быть выполнено с возможностью управления перемещением прибора, и вычислительное устройство запрограммировано для автоматизации протокола QA, подлежащего выполнению с использованием прибора. Кроме того, вычислительное устройство выполнено с возможностью автоматизации перемещения прибора совместно с перемещением медицинского ускорителя. Может быть включена, по меньшей мере, одна пластиковая пластина, содержащая воду (plastic water), и, по меньшей мере, одна пластиковая пластина, содержащая воду, может вмещать в себя ионизационную камеру. По меньшей мере, одна пластиковая пластина, содержащая воду, также может включать в себя датчик для ионизационной камеры, ввернутый в, по меньшей мере, одну пластиковую пластину, содержащую воду, под углом 45°.
[0010] В соответствии с другим аспектом изобретения способ измерений гарантии механического и дозиметрического качества в реальном времени в лучевой терапии включает в себя обеспечение поверхности формирования изображения для приема множественных источников энергии. Поверхность формирования изображения включает в себя плоскость формирования изображения, позиционированную в одной плоскости с изоцентром медицинского ускорителя. Способ также включает в себя направление множественных источников энергии в камеру. Данные, связанные с множественными источниками энергии, можно измерять и регистрировать.
[0011] В соответствии с еще одним аспектом изобретения поверхность формирования изображения может принимать форму фосфорного люминесцентного экрана, выполненного с возможностью приема всех сигналов оптического света, лазерного света и излучения. Цифровой чувствительный элемент выполнен с возможностью оставаться стационарным относительно люминесцентного экрана. Сигналы оптического света, лазерного света и излучения направляются на фосфорный люминесцентный экран по оптическому пути. Дополнительно оптический путь также включает в себя зеркала, выполненные с возможностью направлять сигналы оптического света, лазерного света и излучения на фосфорный люминесцентный экран.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0012] Прилагаемые чертежи обеспечивают визуальные представления, которые будут использоваться для более подробного описания раскрытых здесь иллюстративных вариантов осуществления и могут использоваться специалистами в данной области техники для лучшего понимания их и присущих им преимуществ. В этих чертежах сходные ссылочные позиции идентифицируют соответствующие элементы.
[0013] Фиг. 1 демонстрирует таблицу задач QA для каждого медицинского ускорителя, которые необходимо осуществлять ежедневно, ежемесячно и ежегодно.
[0014] Фиг. 2 демонстрирует вид спереди медицинского ускорителя, используемого для лучевой терапии.
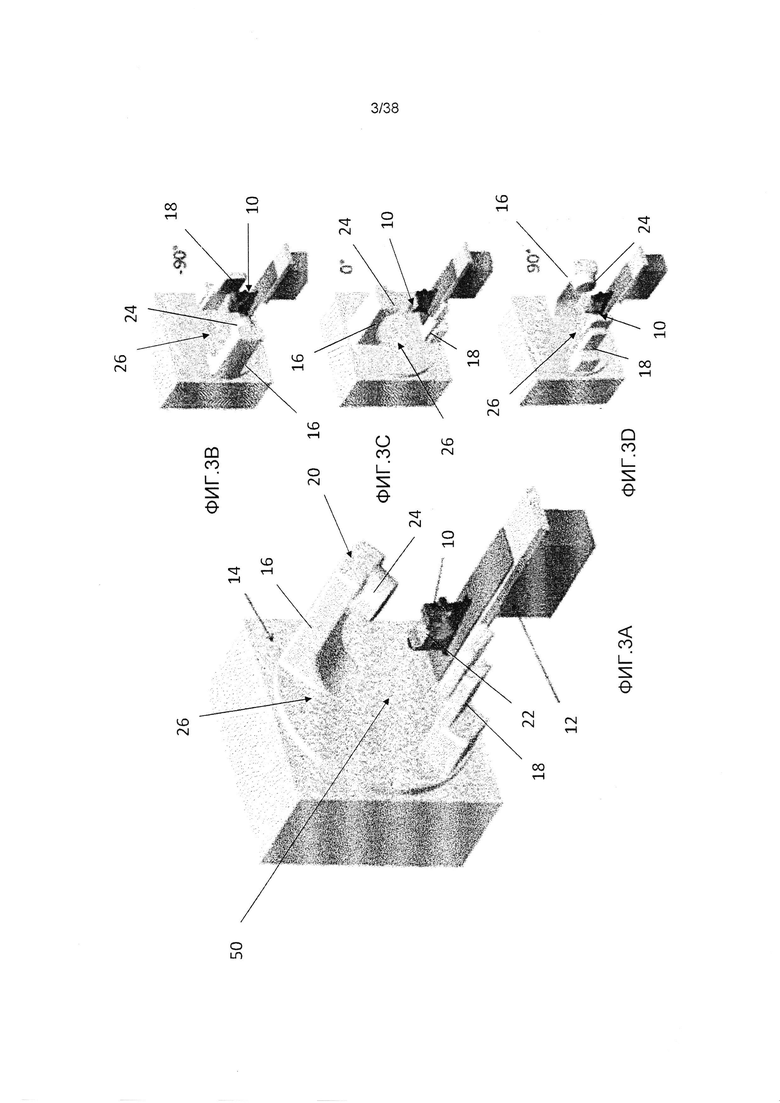
[0015] Фиг. 3A-3D демонстрируют виды в перспективе устройства согласно признакам изобретения, сидящим в лечебном диапазоне медицинского ускорителя.
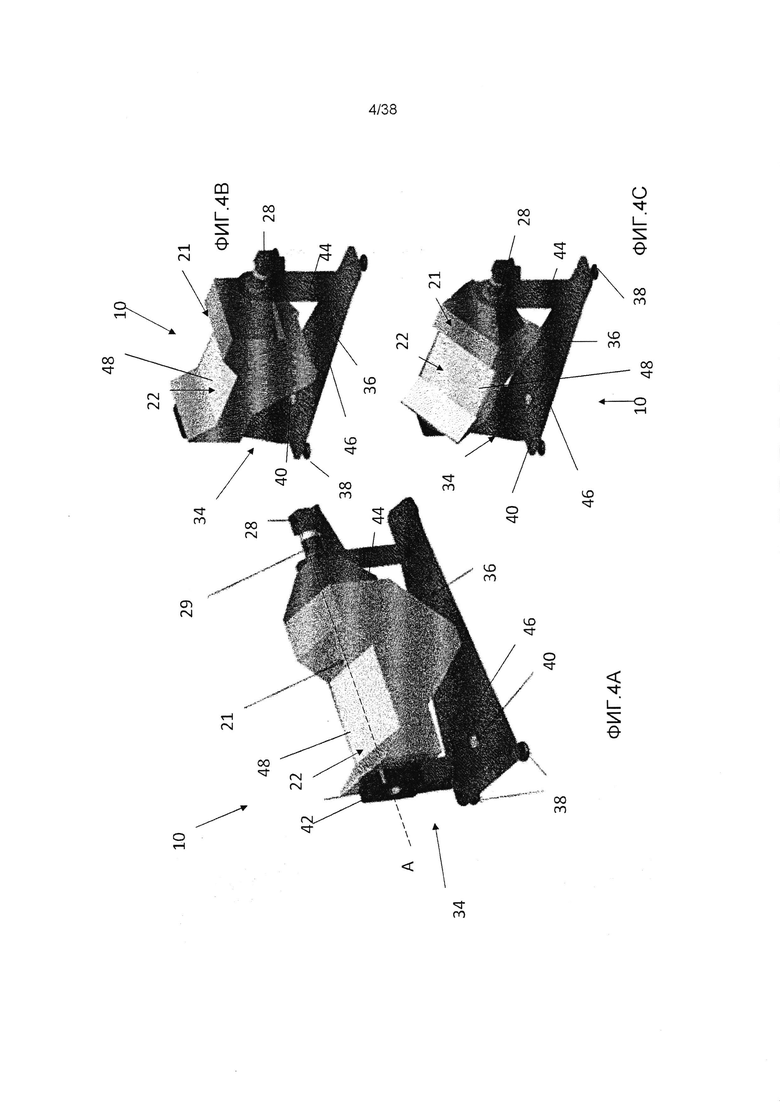
[0016] Фиг. 4A-4C демонстрируют виды в перспективе прибора для измерений гарантии механического и дозиметрического качества в реальном времени в лучевой терапии согласно признакам изобретения.
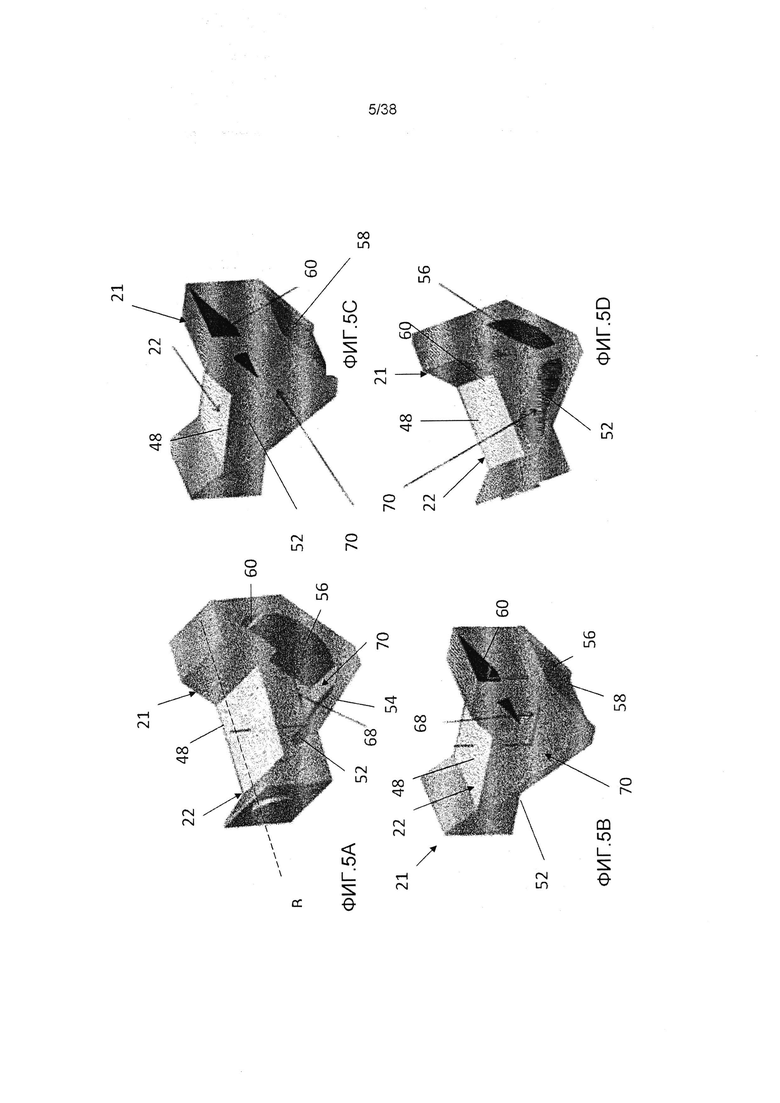
[0017] Фиг. 5A-5D демонстрируют вид, частично выполненный в разрезе прибора для измерений гарантии механического и дозиметрического качества в реальном времени в лучевой терапии согласно признакам изобретения.
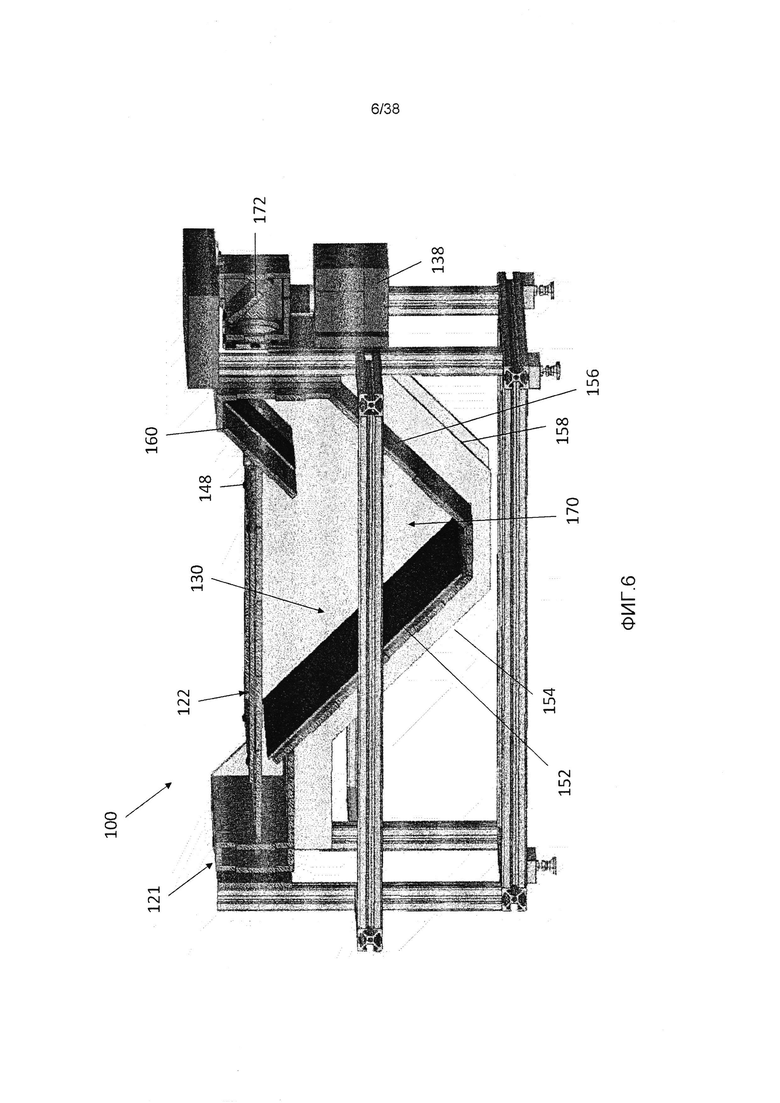
[0018] Фиг. 6 демонстрирует прибор QA согласно варианту осуществления изобретения.
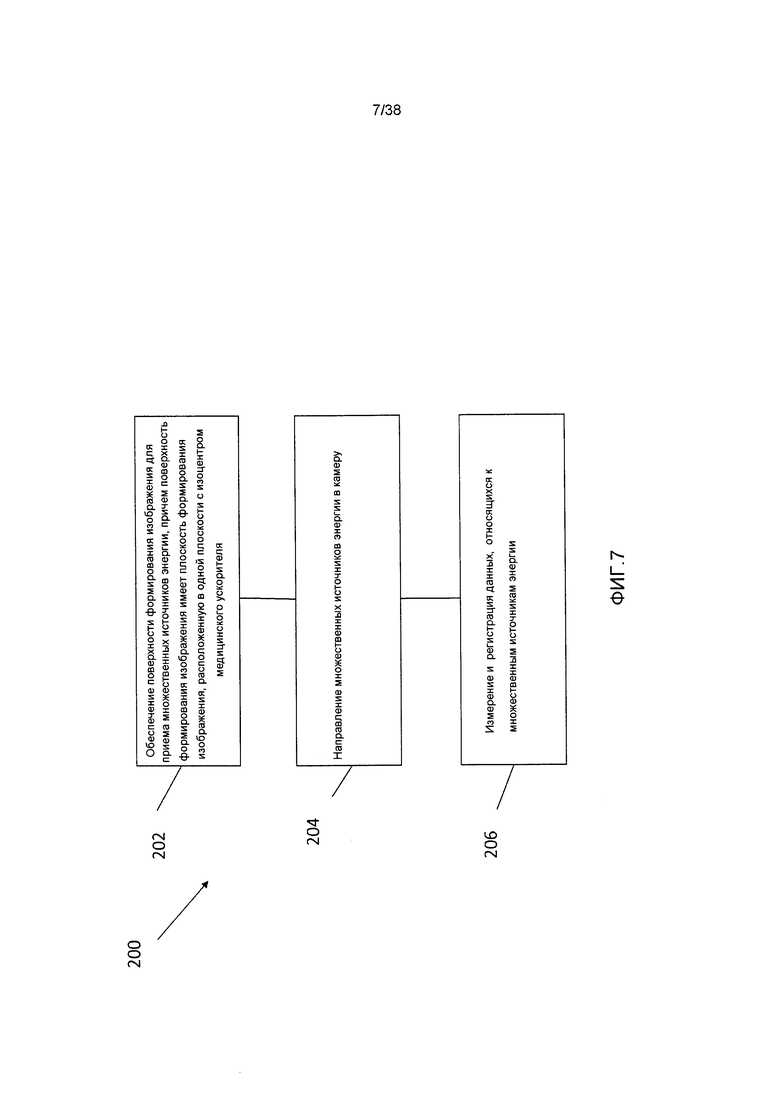
[0019] Фиг. 7 демонстрирует схему способа согласно признакам изобретения.
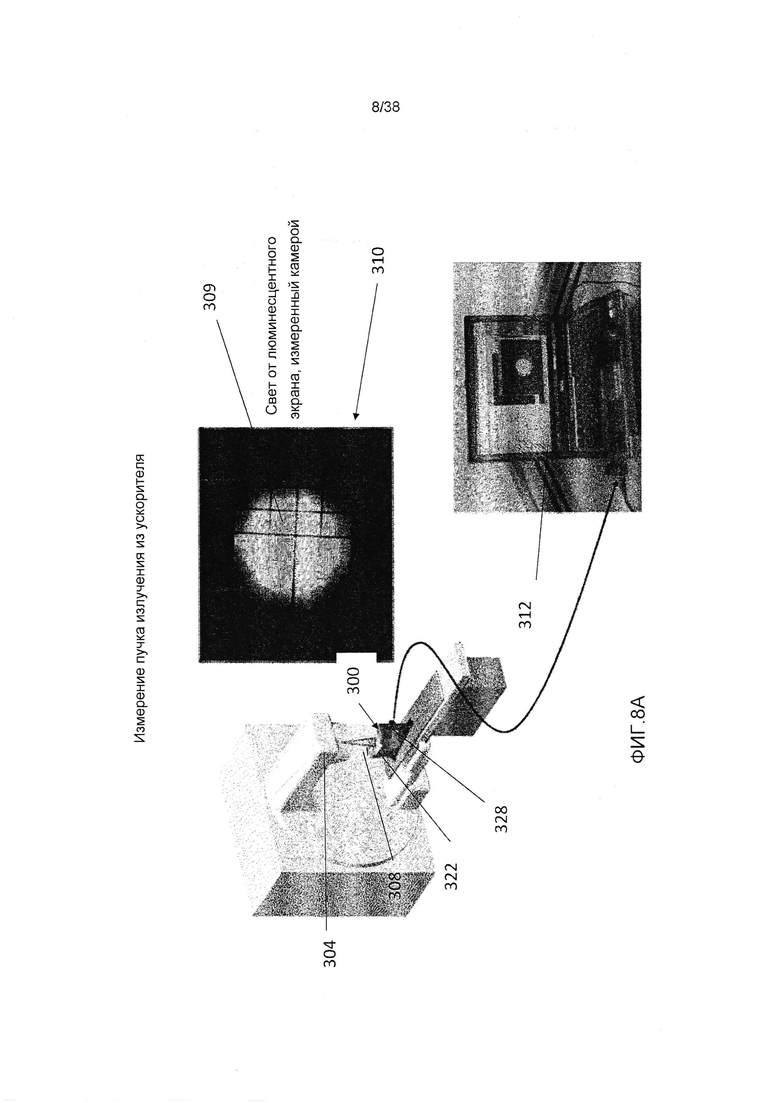
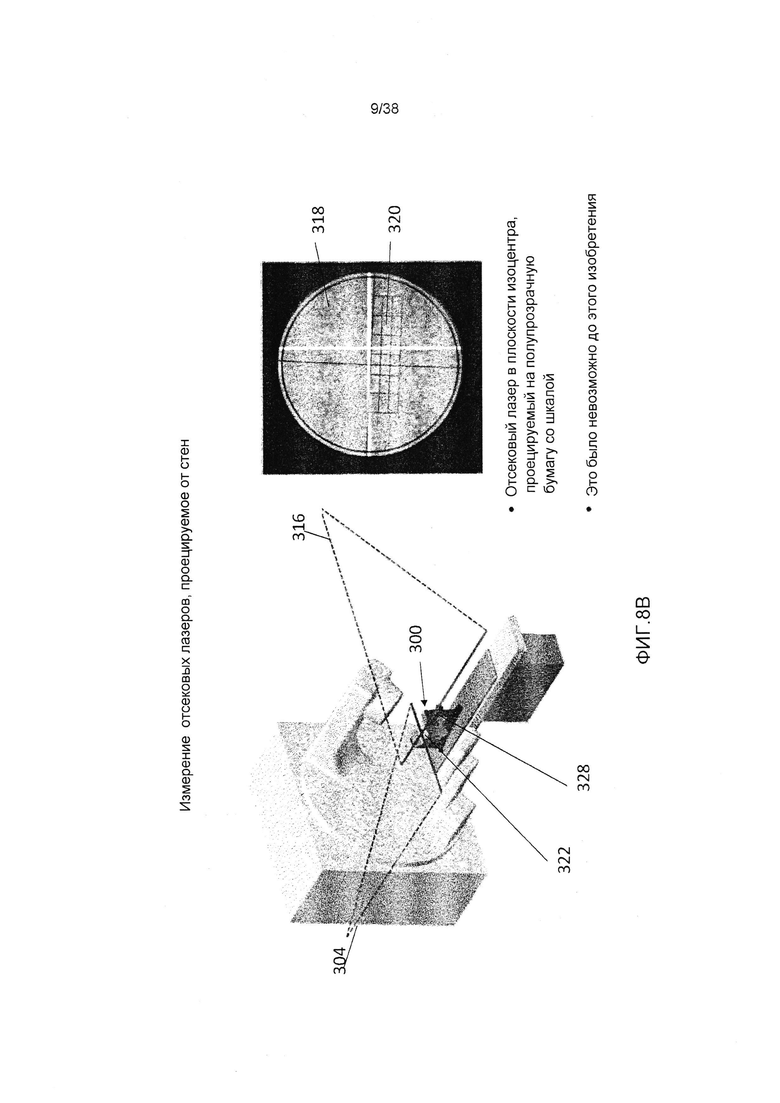
[0020] Фиг. 8A и 8B демонстрируют упрощенные схемы, демонстрирующие способ согласно признакам изобретения. Заметим, что лазерное изображение никогда не захватывалось традиционными устройствами QA.
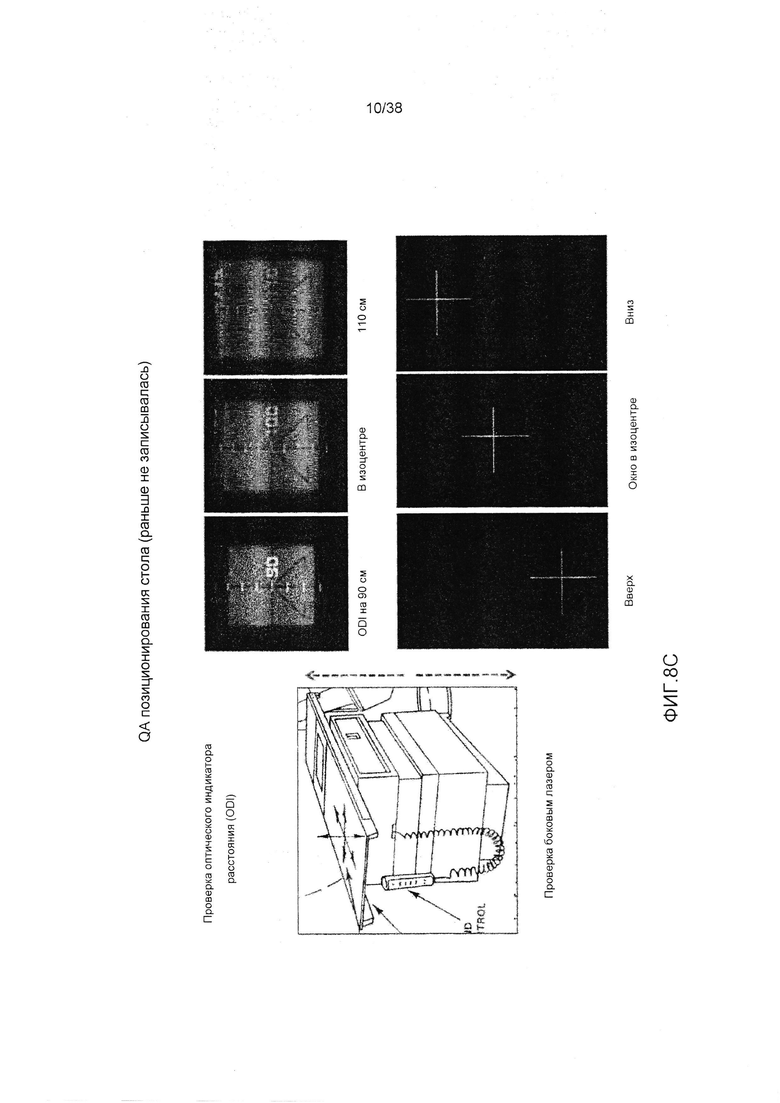
[0021] Фиг. 8C демонстрирует способ осуществления QA позиционирования стола, согласно варианту осуществления изобретения. Заметим, что изображение светового поля с оптическим индикатором расстояния никогда не захватывалось традиционными устройствами QA.
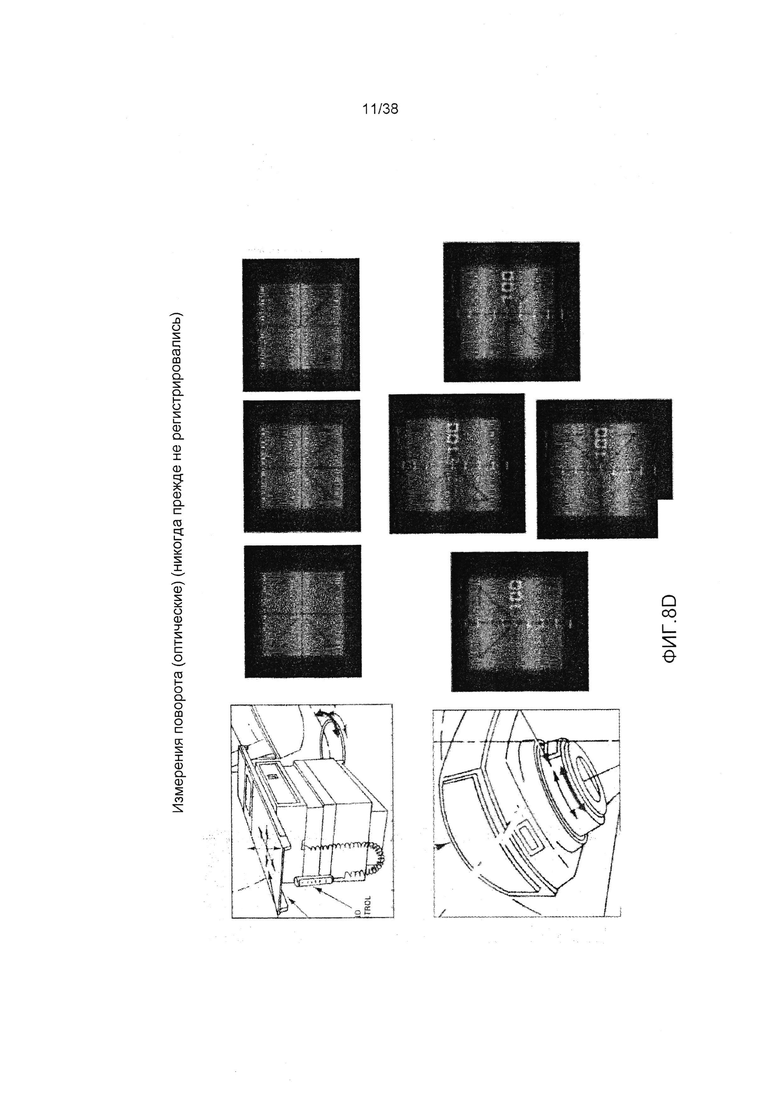
[0022] Фиг. 8D демонстрирует способ осуществления QA поворота, оптически захватываемого для документирования, согласно варианту осуществления изобретения.
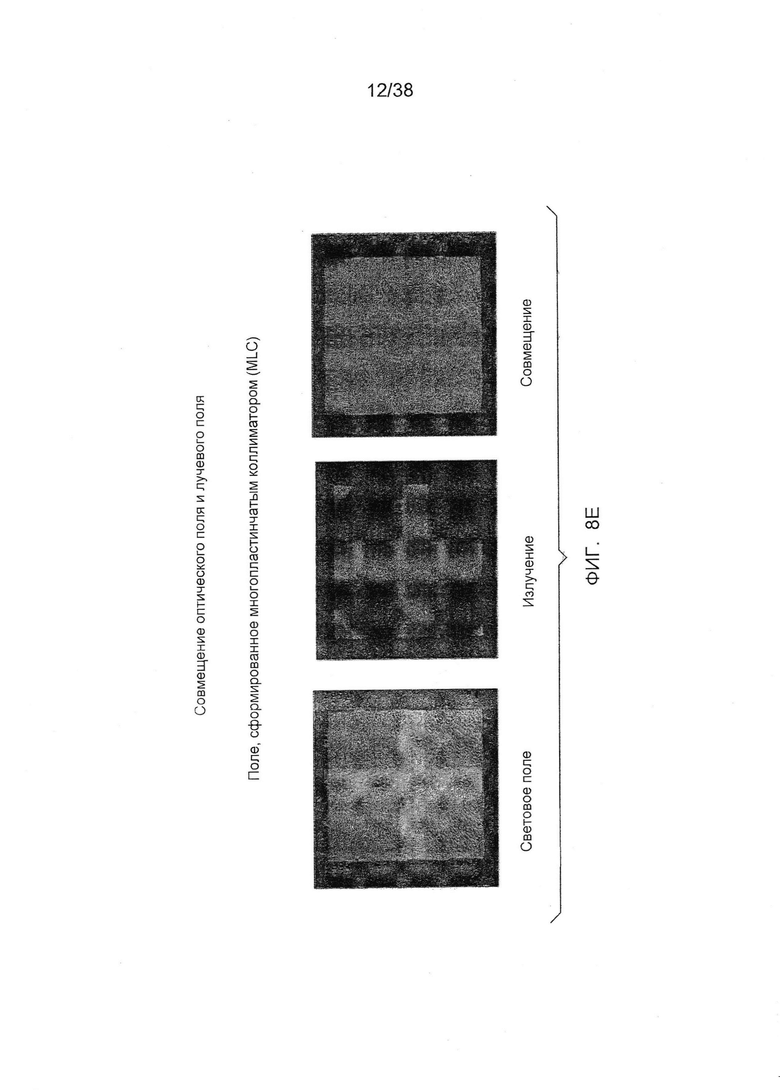
[0023] Фиг. 8E демонстрирует способ осуществления оптического и лучевого совмещения поля, сформированного многопластинчатым коллиматором.
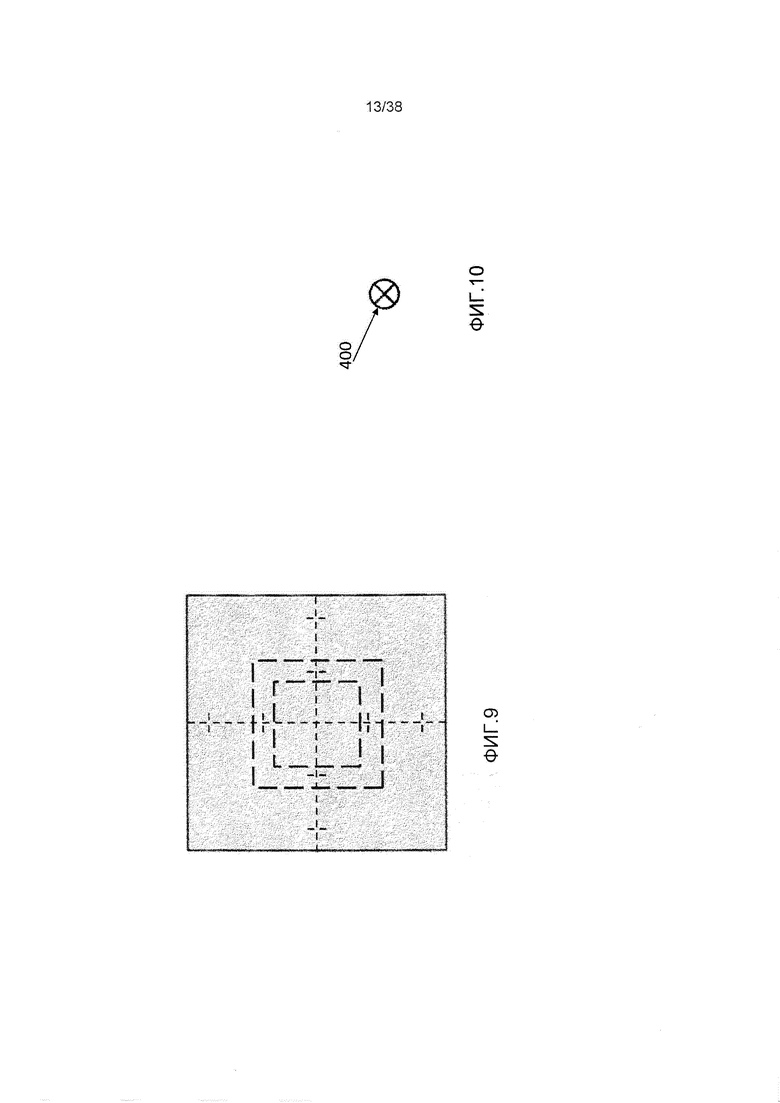
[0024] Фиг. 9 демонстрирует аппаратно запрограммированную цифровую шкалу изображения согласно варианту осуществления изобретения.
[0025] Фиг. 10 демонстрирует инструмент анализа, обеспеченный программой управления, реализованной программным обеспечением, для прибора согласно изобретению.
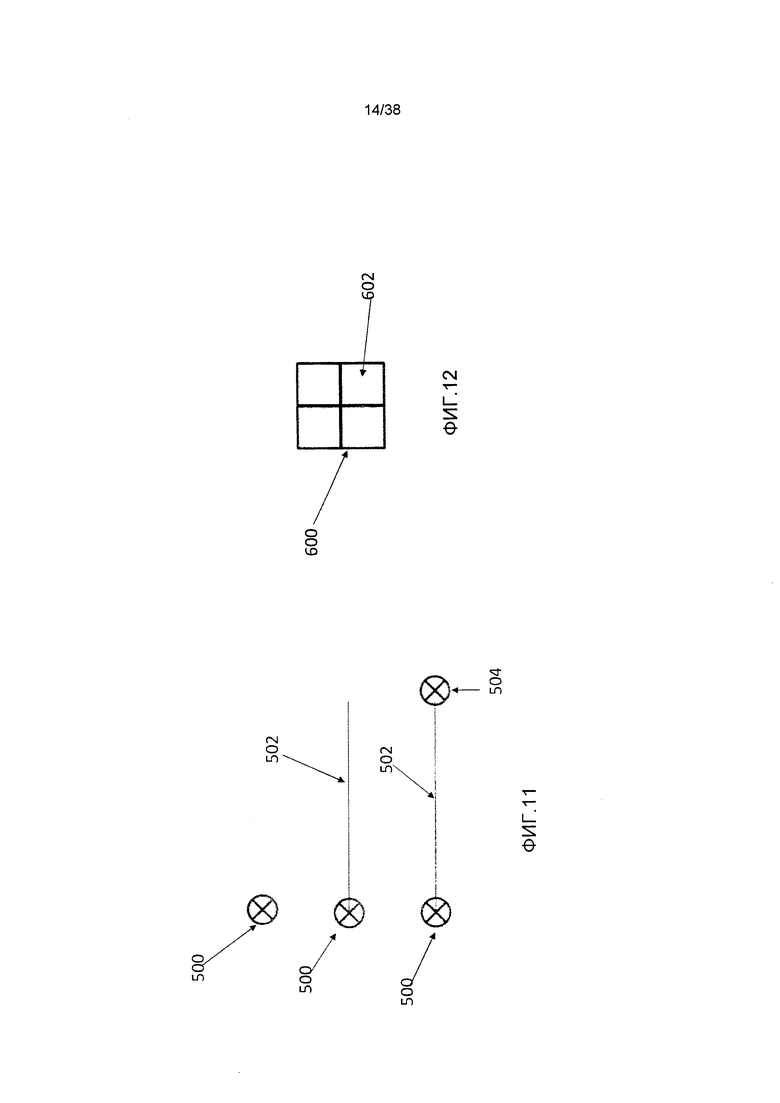
[0026] Фиг. 11 демонстрирует инструмент локализации, обеспеченный программой управления, реализованной программным обеспечением, для прибора согласно изобретению.
[0027] Фиг. 12 демонстрирует инструмент области, представляющей интерес, обеспеченный программой, реализованной программным обеспечением, для прибора согласно изобретению.
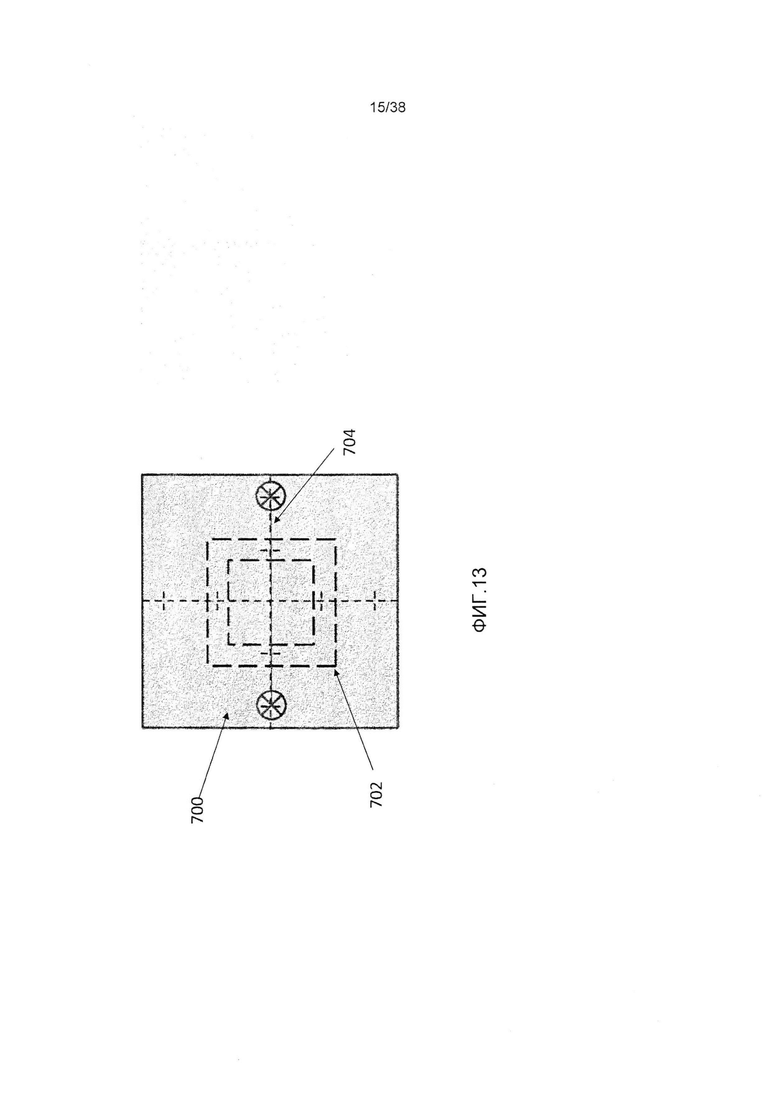
[0028] Фиг. 13 демонстрирует иллюстративный экран для задания шкалы в полученном изображении, снятом с использованием прибора согласно изобретению.
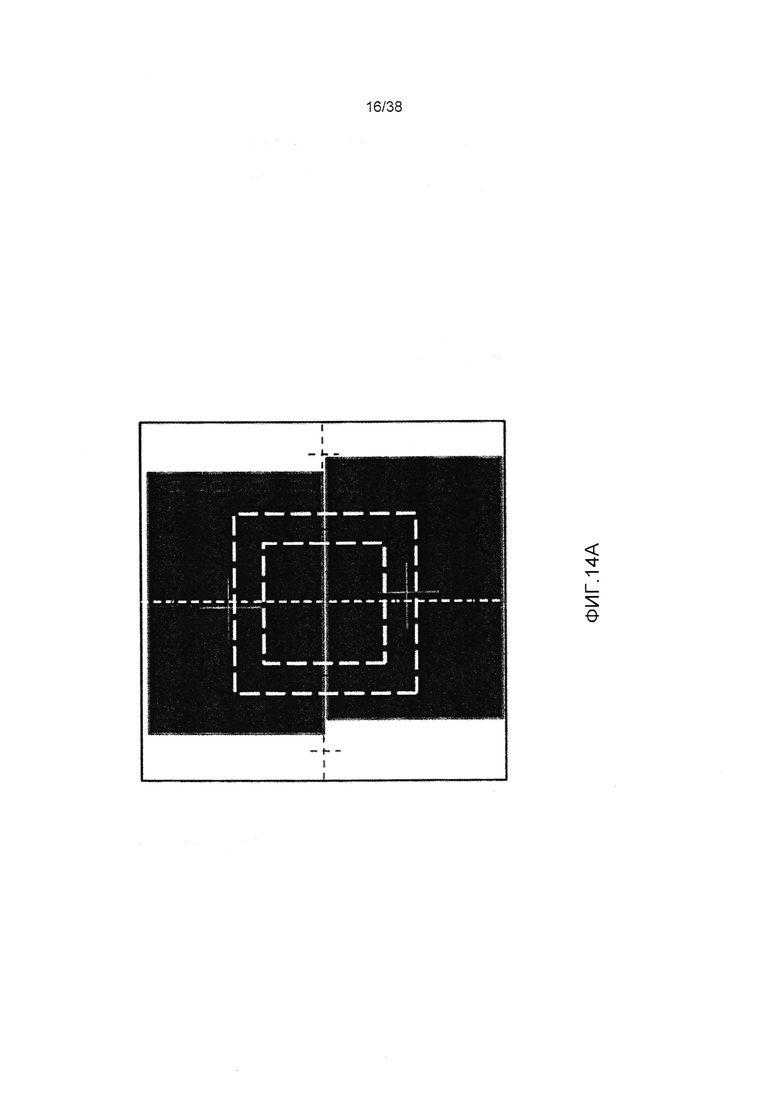
[0029] Фиг. 14A демонстрирует пример программного признака для наложения изображений, снятом посредством прибора согласно изобретению.
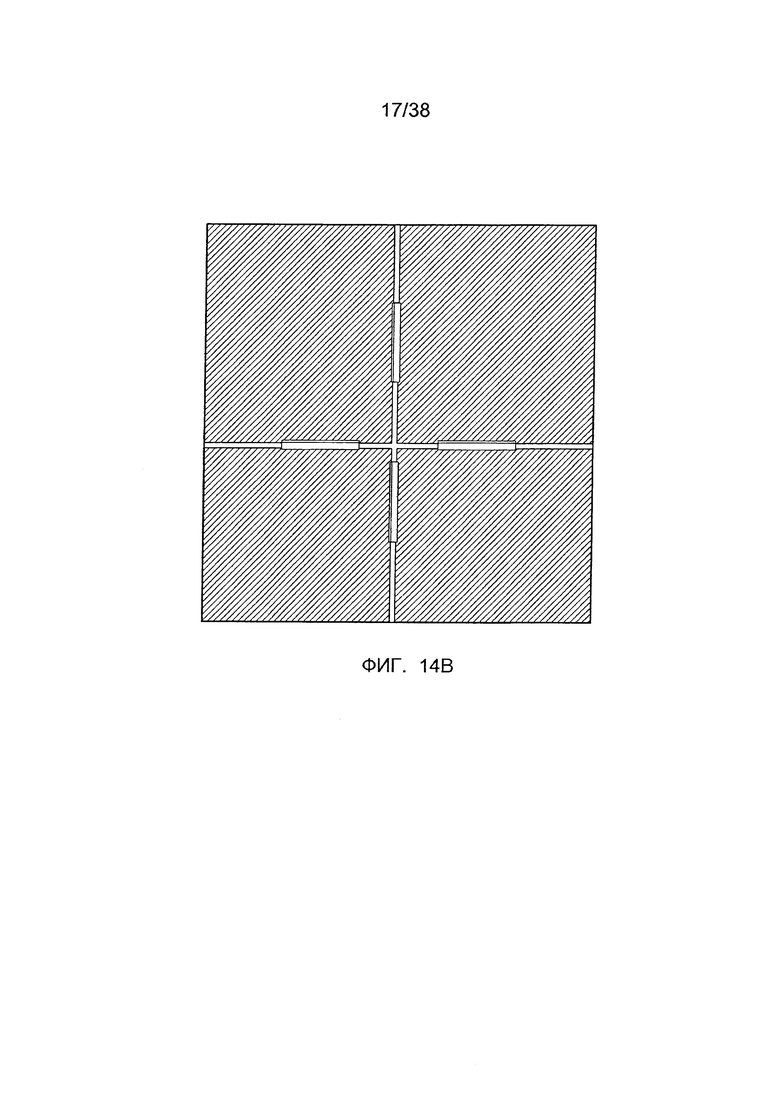
[0030] Фиг. 14B демонстрирует пример изображения для анализа коллинеарности лазера, снятого с использованием прибора согласно изобретению.
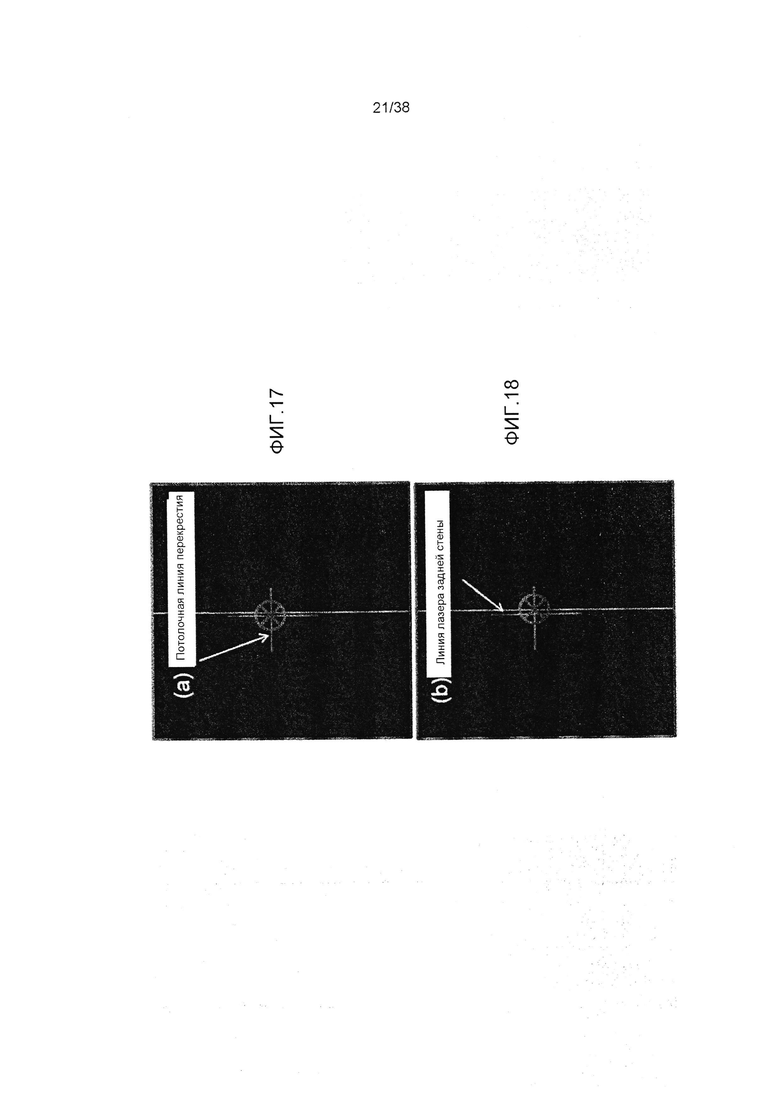
[0031] Фиг. 15-19 демонстрируют иллюстративные примеры регистрации лазерных задач QA, выполняемых посредством прибора согласно изобретению.
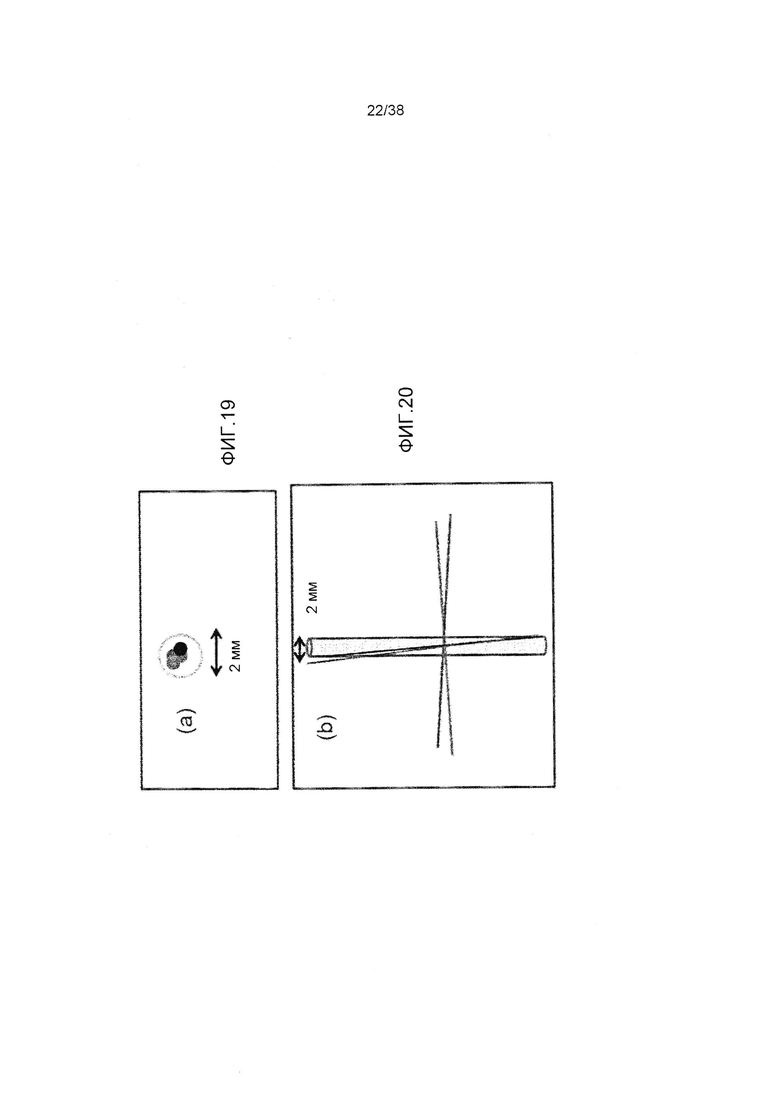
[0032] Фиг. 20 демонстрирует анализ лазерного выравнивания с использованием прибора согласно изобретению.
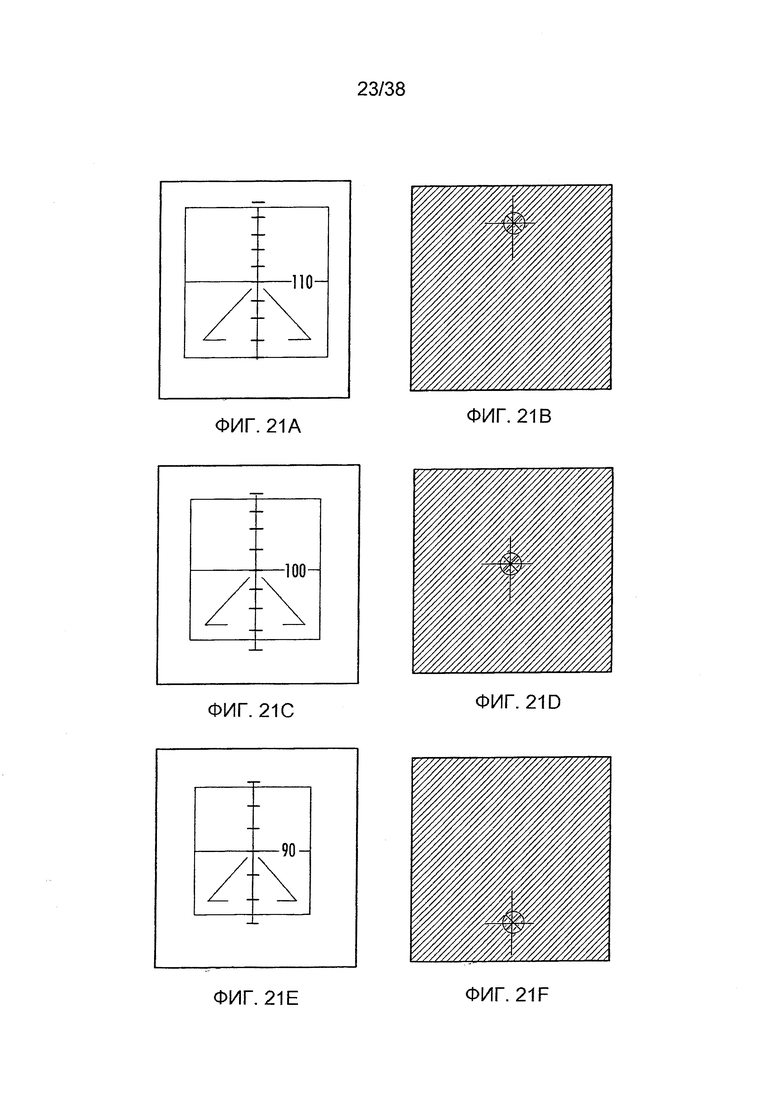
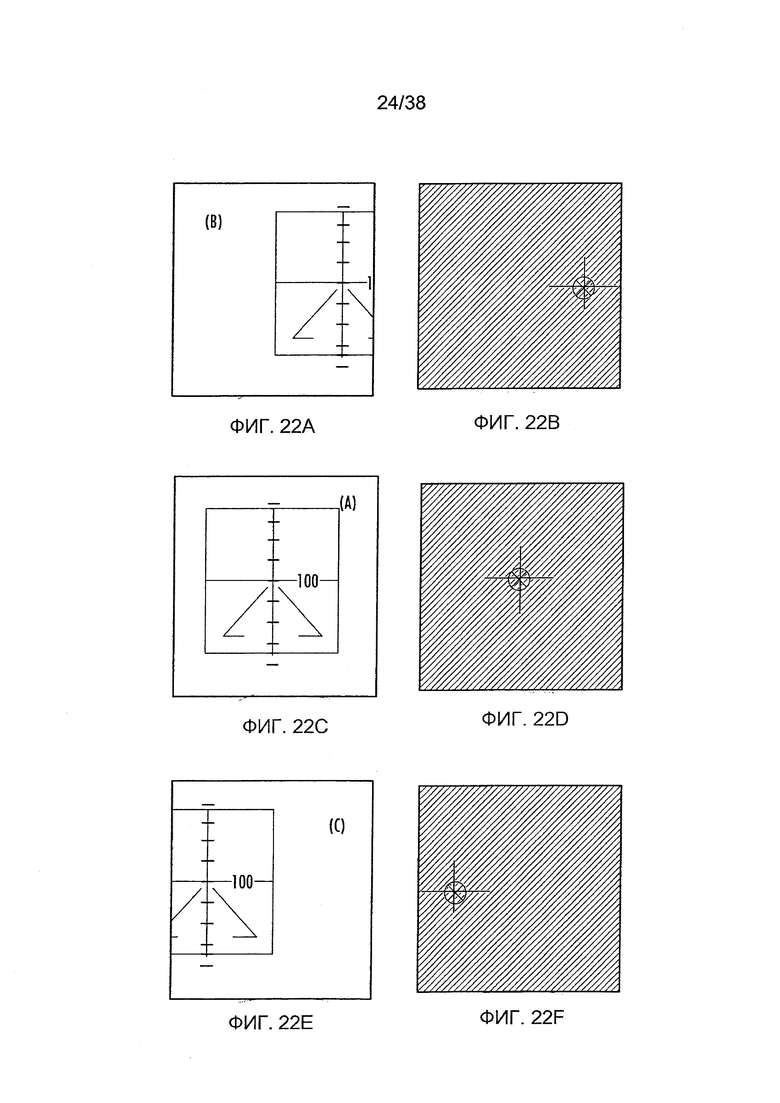
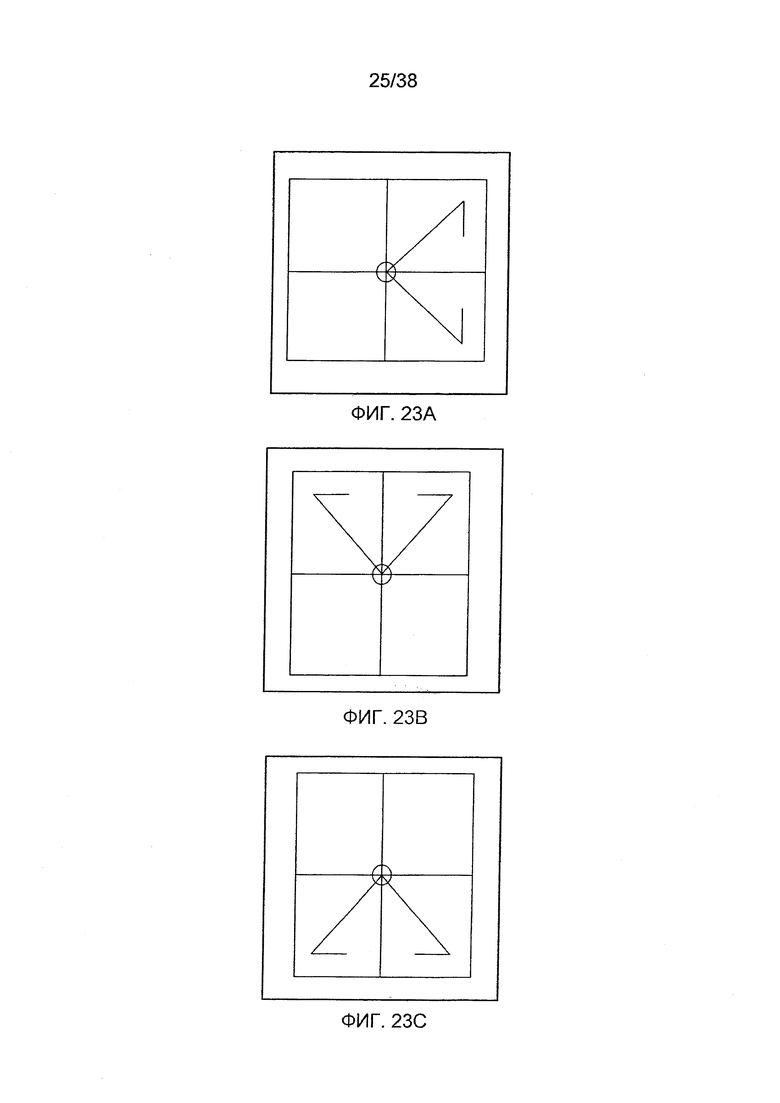
[0033] Фиг. 21A-F, 22A-F и 23A-C демонстрируют иллюстративные примеры регистрации задач QA перемещения стола и оптического индикатора расстояния (ODI), выполняемых посредством прибора согласно изобретению.
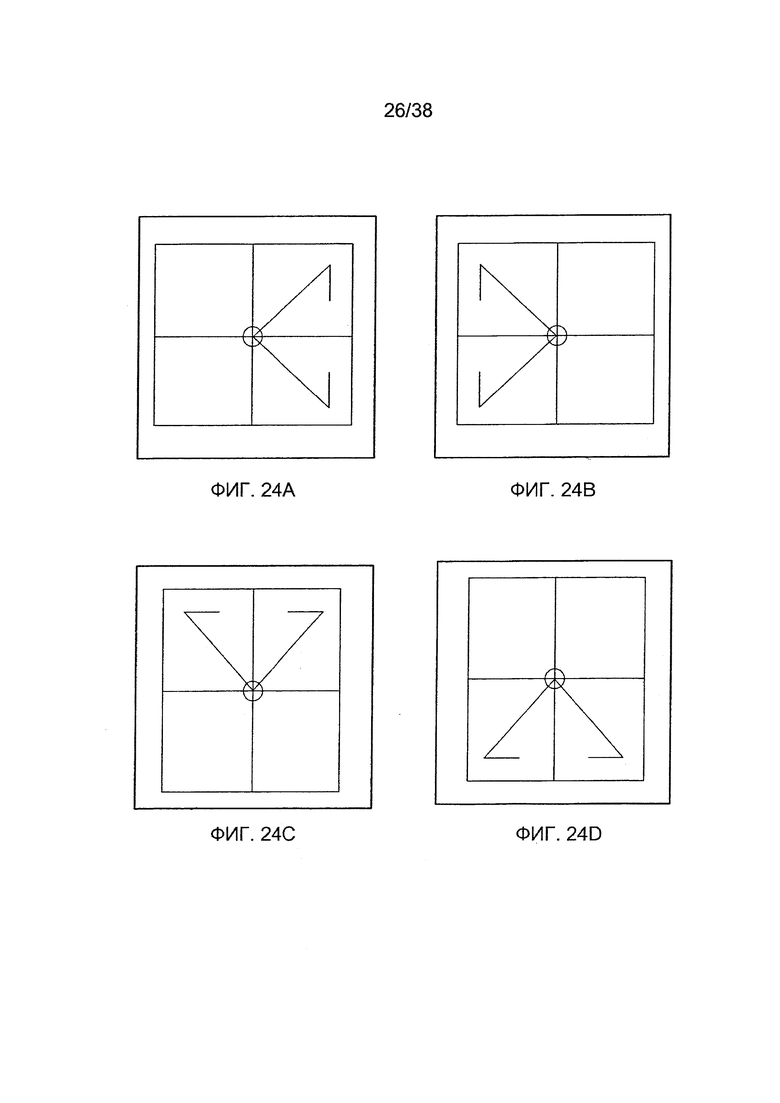
[0034] Фиг. 24A-D демонстрируют QA поворота коллиматора с использованием прибора согласно изобретению.
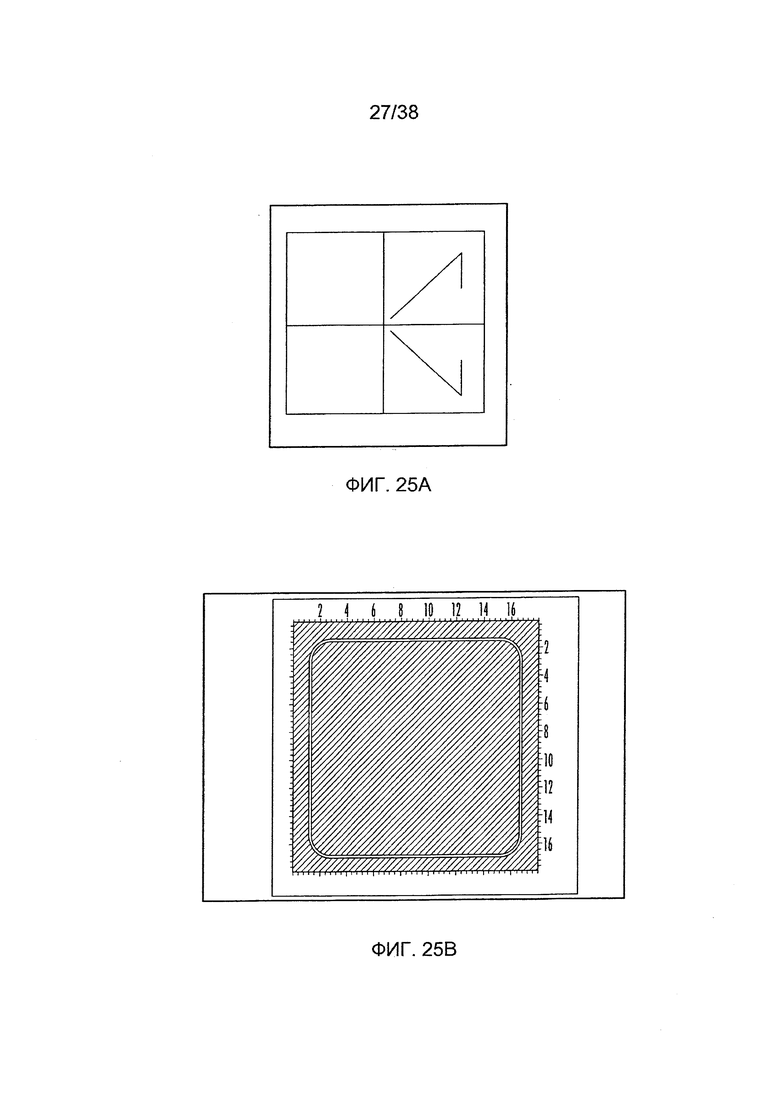
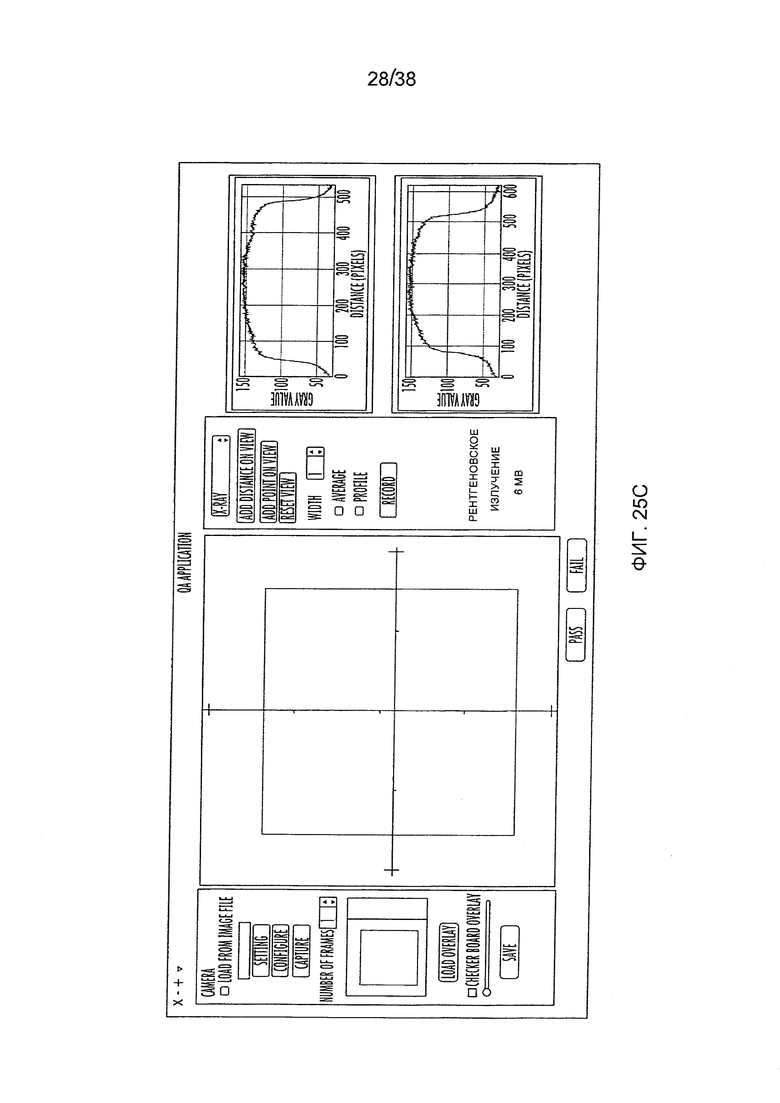
[0035] Фиг. 25A-D и 26 демонстрируют визуальные результаты QA конгруэнтности поля излучения и светового поля с использованием прибора согласно изобретению.
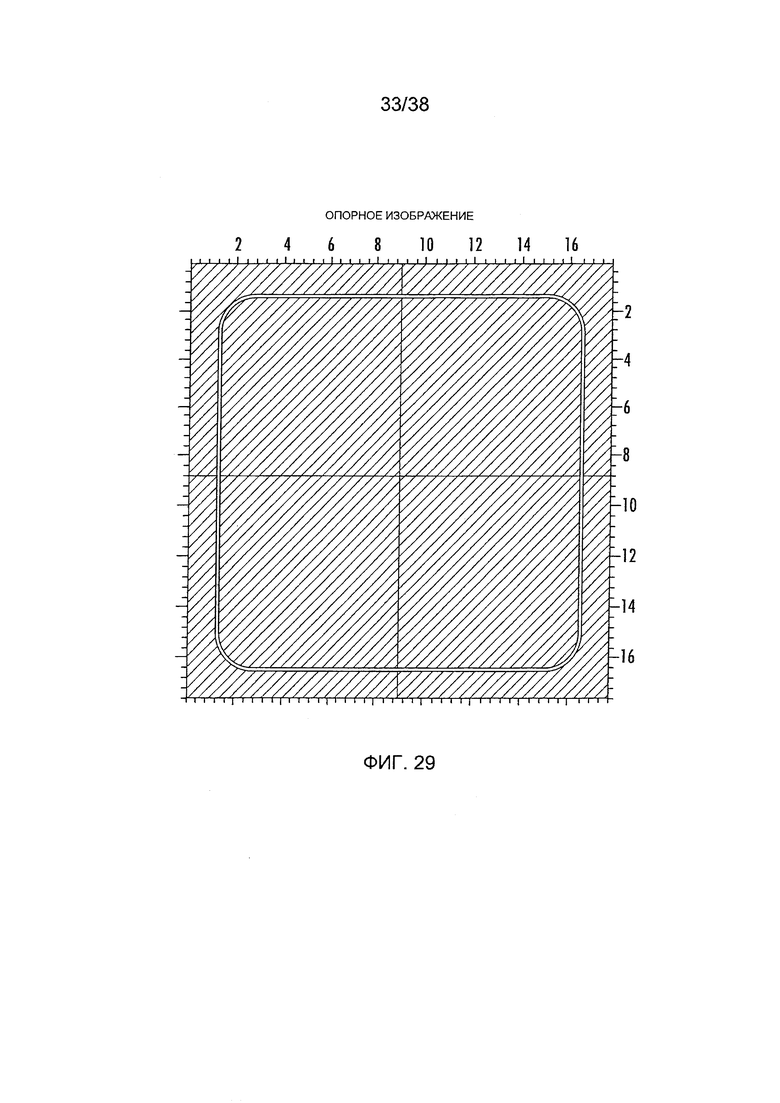
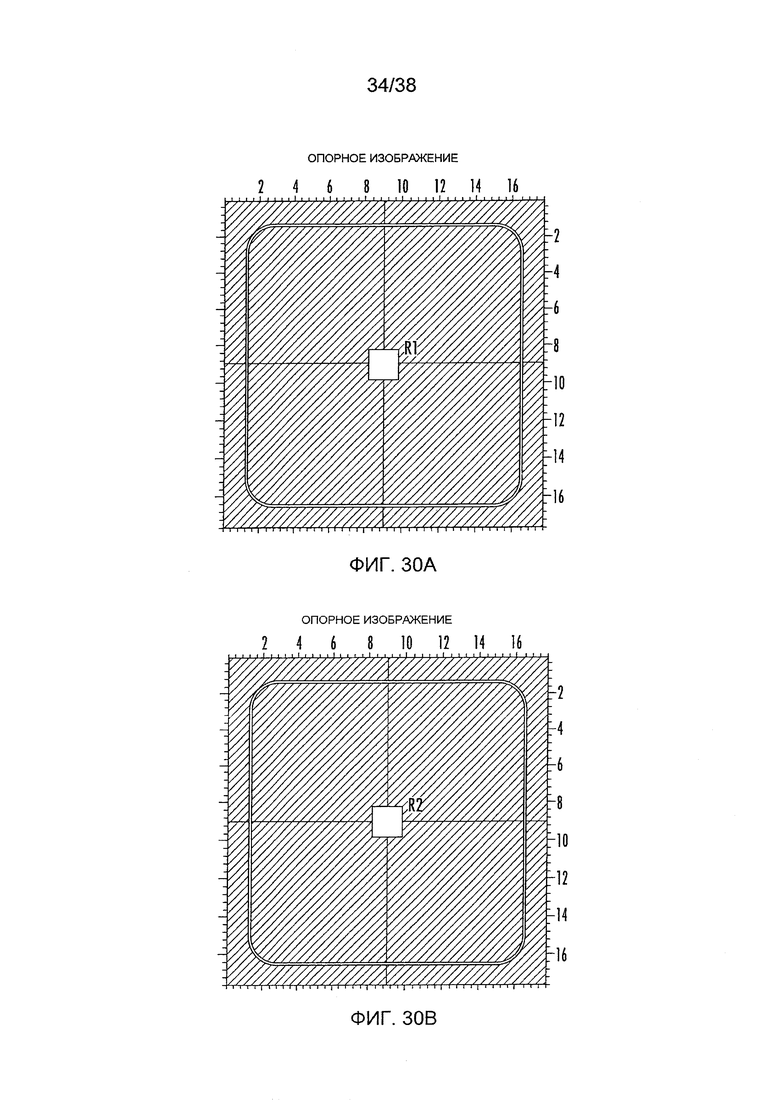
[0036] Фиг. 27A и 27B, 28A и 28B, 29, 30A и 30B демонстрируют визуальные представления получения и анализа поля излучения.
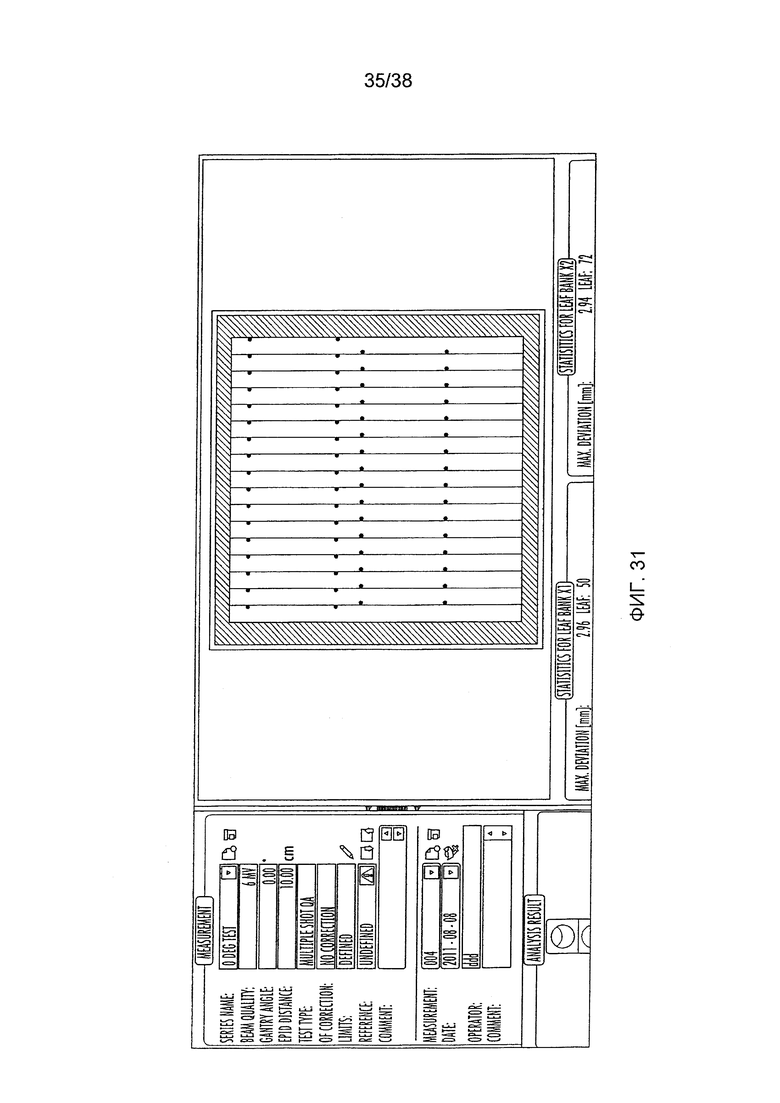
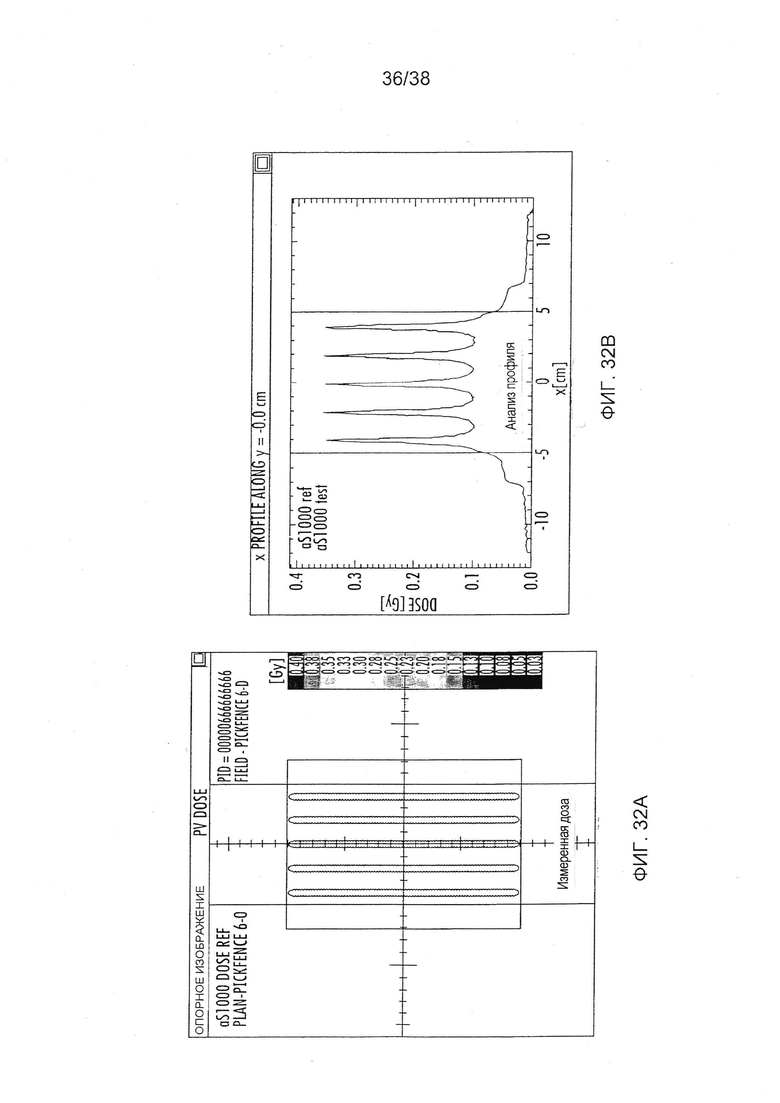
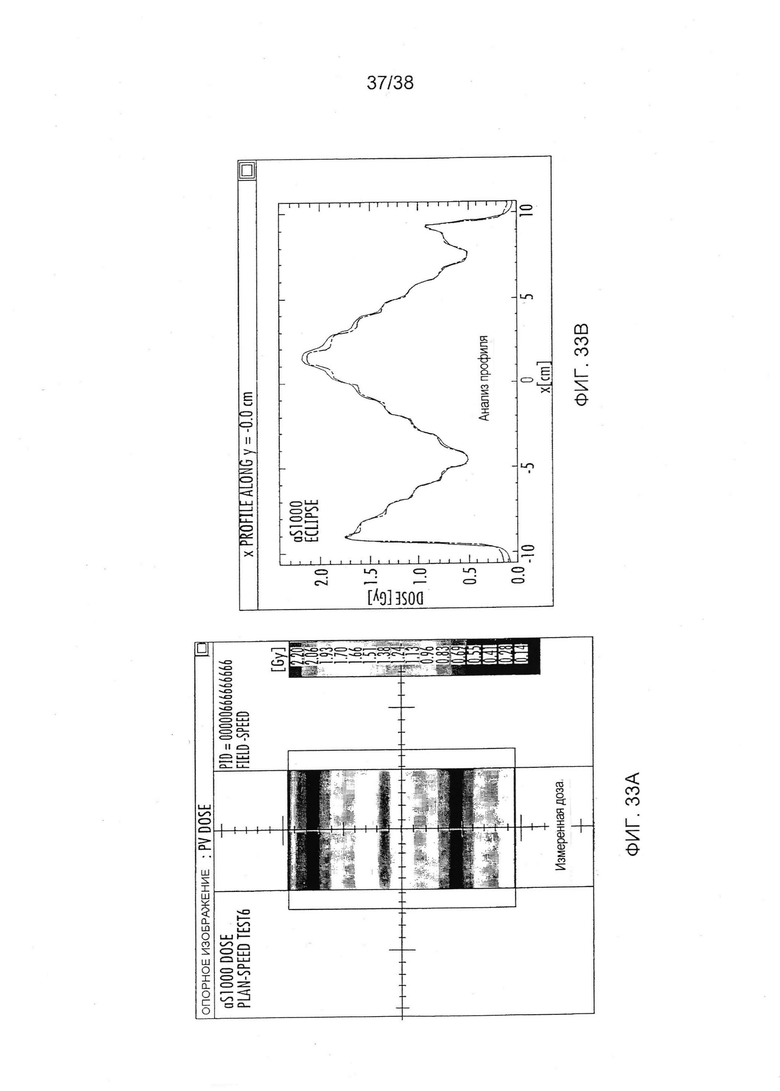
[0037] Фиг. 31, 32A-B и 33A-B демонстрируют визуальные представления и анализ измерений QA многопластинчатого коллиматора (MLC), снятых с использованием прибора согласно изобретению.
[0038] Фиг. 33A и 33B демонстрируют визуальные представления измерения и анализа скорости пластин многопластинчатого коллиматора (MLC).
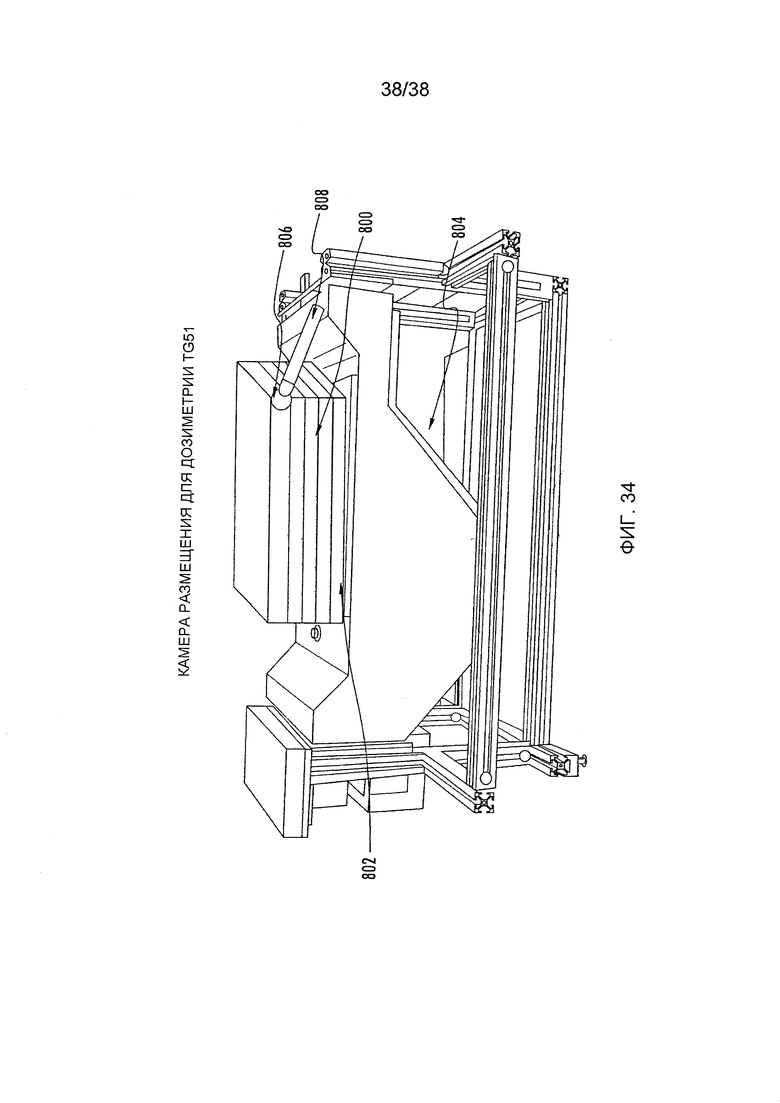
[0039] Фиг. 34 демонстрирует упрощенную схему, согласно которой прибор QA согласно изобретению может получать измерения абсолютной дозиметрии с помощью ионизационной камеры.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0040] Раскрытый здесь предмет изобретения будет описан здесь более подробно со ссылкой на прилагаемые чертежи, в которых показаны некоторые, но не все варианты осуществления изобретения. Аналогичные ссылочные позиции обозначают аналогичные элементы. Раскрытый здесь предмет изобретения можно реализовать во многих разных формах, и его не следует рассматривать как ограниченный изложенными здесь вариантами осуществления; напротив, эти варианты осуществления обеспечены таким образом, чтобы это раскрытие удовлетворяло применимым законным требованиям. В действительности специалист в области техники, к которой относится раскрытый здесь предмет изобретения, может предложить различные модификации и другие варианты осуществления раскрытого здесь предмета изобретения, отличные от изложенных здесь, на основании принципов, представленных в вышеприведенных описаниях и прилагаемых чертежах. Поэтому следует понимать, что раскрытый здесь предмет изобретения не подлежит ограничению раскрытыми конкретными вариантами осуществления, и что модификации и другие варианты осуществления подлежат включению в объем нижеследующей формулы изобретения.
[0041] Изобретение относится к способу и устройству для измерений гарантии механического и дозиметрического качества в реальном времени в лучевой терапии. Согласно иллюстративному варианту осуществления, представленному на фиг. 3A-3D, можно применять единый прибор унификации для осуществления всех механических и дозиметрических задач QA, тем самым значительно упрощая и унифицируя все задачи QA. Использование цифровой камеры гарантирует, что все измерения можно документировать для повторения анализа. Таким образом, данные можно захватывать в реальном времени в одном сеансе. Кроме того, систему можно интегрировать с работой излучательных машин для автоматизации всего процесса. Данные можно анализировать в реальном времени или в специально отведенное время для обеспечения сигналов тревоги относительно эксплуатационных показателей машины или их прогнозирования по отношению к лечебному отсеку. Соответственно способ и аппарат изобретения позволяют унифицировать измерение механического движения и компонента излучения машины.
[0042] На фиг. 3A-3D показаны принципы работы системы. Согласно фиг. 3A-3D прибор 10 позиционируется на ложе 12 для пациента в кабинете лучевой терапии. Прибор 10 позиционируется рядом с медицинским ускорителем 14 для проведения измерений QA, так что прибор 10 позиционируется между челюстями 16, 18 медицинского ускорителя 14, включающего в себя многопластинчатый коллиматор (MLC) 24 и гентри 26. Находясь на ложе 12, прибор 10 может непрерывно вращаться приблизительно от +90° до -90°, что позволяет наблюдать излучательные или оптические изображения гентри 26, когда оно вращается приблизительно от +90° до -90°. Прибор также может поворачиваться на все 360°, когда он поддерживается таким образом, что может свешиваться за край ложа. Фиг. 3A демонстрирует челюсти 16, 18, гентри 26 и многопластинчатый коллиматор (MLC) 24 в промежуточной позиции между приблизительно 0° и 90°. Фиг. 3B демонстрирует челюсти 16, 18, гентри 26 и многопластинчатый коллиматор (MLC) 24 в позиции приблизительно -90°. Фиг. 3C демонстрирует челюсти 16, 18, гентри 26 и многопластинчатый коллиматор (MLC) 24 в позиции приблизительно 0°, и фиг. 3D демонстрирует челюсти 16, 18, гентри 26 и многопластинчатый коллиматор (MLC) 24 в позиции приблизительно 90°.
[0043] Кроме того, согласно фиг. 3A-3D для измерений QA излучения, включающих в себя комплексное лечение с модуляцией интенсивности, будет использоваться поверхность 22 формирования изображения для приема множественных источников энергии. Поверхность 22 формирования изображения может принимать любую форму, известную специалисту в данной области техники, для приема множественных источников энергии. В частности, для захвата множественных источников энергии можно использовать фосфорный люминесцентный экран или сцинтилляторная пластина. Фосфорный люминесцентный экран также используется для оптического формирования изображения световых полей, оптического индикатора и лазерных путей. Поверхность 22 формирования изображения также может включать в себя метки для демонстрации пространственной калибровки. Благодаря размещению прибора в позиции, где ему не мешает лечебная головка 20, систему можно использовать для оптического захвата позиций всех лазеров и других индикаторов выравнивания в камере, а также целостности механических движений медицинского ускорителя 14, включающего в себя челюсти 16, 18, MLC 24, гентри 26 и ложе 12. Это является главным усовершенствованием, поскольку эти оптические измерения в настоящее время визуально фиксируются и регистрируются в виде текстов в документе QA. Использование общего фосфорного люминесцентного экрана или сцинтилляторной пластины как для излучательного, так и для оптического формирования изображения также является важным, еще подлежащим отражению в уровне техники, открытием, поскольку избавляет от необходимости заменять фосфорный люминесцентный экран для оптического формирования изображения.
[0044] Фиг. 4A-4C демонстрируют более подробные виды прибора 10 согласно признакам изобретения. Фиг. 4A демонстрирует вид в перспективе первой стороны прибора 10, тогда как фиг. 4B демонстрирует вид в перспективе второй стороны прибора 10, обе из которых отвечают признакам изобретения. Фиг. 4C демонстрирует вид в перспективе прибора, повернутого в позицию около -45°. Согласно фиг. 4A-4C прибор 10 включает в себя корпус 21 и камеру 28. Камера может принимать форму традиционной цифровой камеры или камеры, устойчивой к излучению. Следует отметить, что, если используется традиционная цифровая камера, то описанный ниже защитный экран можно использовать для предохранения камеры от излучения и для снижения общей стоимости прибора по сравнению с моделью, включающей в себя камеру, устойчивую к излучению. Камера 28 дополнительно выполнена с возможностью измерения и регистрации данных, относящихся к множественным источникам энергии, используемым в лучевой терапии. Камера 28 также включает в себя объектив 29. Для отвода данных из множественных источников энергии в камеру 28, при всех углах гентри 26 медицинского ускорителя 14, прибор 10 также включает в себя систему 30 зеркал. Система 30 зеркал включает в себя внутреннюю трехзеркальную компоновку, которая будет более подробно описана со ссылкой на фиг. 5A-5D. Хотя трехзеркальная компоновка показана здесь в качестве иллюстративного варианта осуществления, можно использовать любую функциональную систему зеркал при условии, что она поддерживает стационарную позицию камеры, в то время как фосфорный люминесцентный экран датчика вращается относительно плоскости изоцентра гентри 26 ускорителя 14.
[0045] Кроме того, согласно фиг. 4A-4C прибор 10 установлено на поворотном столе 34. Поворотный стол 34 позволяет поворачивать прибор 10 между приблизительно -90° и 90°, благодаря чему поверхность 22 формирования изображения и система 30 зеркал могут сохранять выравнивание с гентри 26 для регистрации данных. Поворотный стол 34 также может включать в себя станину 36. Станина 36 включает в себя выравнивающие ножки 38 и пузырьковый нивелир 40. Выравнивающие ножки 38 и пузырьковый нивелир 40 позволяют нивелировать прибор 10 для оптимальной работы, при размещении для анализа QA медицинского ускорителя. Поворотный стол 34 также может включать в себя кронштейны 42, 44, которые удерживают прибор 10, в том числе и в подвешенном состоянии, чуть выше верхней поверхности 46 станины 36. Это позволяет устройству 10 свободно вращаться относительно оси “A” поворотного стола 34. Механизм для поворота может принимать форму любого подходящего механизма для поворота устройства 10 приблизительно от -90° до 90°. В другом варианте осуществления основание целиком может быть выполнено с возможностью вращения вместе со кронштейнами 42, 44 и прибором 10, что позволяет получать измерения при полном обороте на 360°.
[0046] На фиг. 5A-5D показана внутренняя трехзеркальная компоновка 30, которая может вращаться для захвата данных при разных углах гентри. Эта трехзеркальная компоновка 30 в корпусе 21 допускает размещение плоскости 48 изображения, т.е. поверхности 22 формирования изображения, в изоцентре плоскости машины 50, который является центром калибровки всех параметров машины. Важнее всего то, что камера 28 стационарна и позиционирована на одной оси с плоскостью формирования изображения. Таким образом, плоскость 48 изображения коллинеарна оси “B” по продольному центру камеры 28. Дополнительно плоскость 48 изображения способна вращаться относительно оси “B” камеры 28. Следует также заметить, что камера 28 может оставаться стационарной, в то время как прибор 10 вращается вокруг камеры 28.
[0047] Кроме того, согласно фиг. 5A-5D первое зеркало 52 позиционируется на первой нижней стенке 54 корпуса 21 прибора 10, напротив камеры 28. Второе зеркало 56 позиционируется на второй нижней стенке 58 корпуса 21 прибора 10 и рядом с первым зеркалом 52, расположенным на первой нижней стенке 54. Первое зеркало 52 и второе зеркало 56 разделяются углом друг от друга. Можно использовать любой подходящий угол между ними при условии, что он обеспечивает правильную передачу данных в камеру 28. Третье зеркало 60 позиционируется в первой плоскости, параллельной второй плоскости, в которой позиционируется второе зеркало 56. Первая плоскость отстоит от второй плоскости на некоторое расстояние. Расстояние может быть любым расстоянием, пригодным для передачи данных в камеру 28. Предпочтительно все зеркала установлены под углом 45° для обеспечения отражения под углом 90°. Это не является обязательным требованием, поскольку для обеспечения отражения под углом 90° можно использовать робототехнику или для коррекции несовершенного отражения можно использовать программное обеспечение.
[0048] В общем случае данные из лечебной головки 20 передаются вдоль траектории 68. Траектория 68 проходит перпендикулярно через поверхность 22 формирования изображения и отражается от первого зеркала 52 под углом приблизительно 90°. Предпочтительно угол в точности равен 90°. Несовершенные 90° будут корректироваться программным обеспечением. Затем траектория 68 проходит через внутреннее пространство 70, определенное стенками прибора 10, для отражения от второго зеркала 56 под углом приблизительно 90°. Затем траектория 68 продолжается вертикально для отражения от третьего зеркала 60 под углом приблизительно 90°. Отразившись от третьего зеркала 60, траектория 68 продолжается через объектив камеры 28 для регистрации данных, распространяющихся вдоль траектории 68. Хотя выше описана конкретная система зеркал, этот пример не следует считать ограничительным. В действительности система зеркал может быть выполнена так, что она имеет одно или более зеркал, неподвижных или с регулируемой позицией, или их комбинацию. Дополнительно система зеркал может быть способна вращаться для захвата данных при разных углах гентри.
[0049] Также согласно фиг. 5A-5D при повороте прибора третье зеркало направляет все данные от плоскости изображения в камеру. Камера может оставаться стационарной для захвата любых повернутых видов, которые могут корректироваться цифровыми средствами, или камера может вращаться в своей стационарной позиции с подсистемой зеркала, чтобы никакой коррекции изображения не требовалось. Стационарная камера дает преимущество в простоте установки. В состав системы для сбора и анализа данных также может входить компьютер. Компьютер включает в себя контур обратной связи для автоматического управления прибором 10. В частности, прибор 10 может быть запрограммирован перемещаться синхронно с механическими компонентами медицинского ускорителя относительно изоцентра. Измерения производятся в реальном времени. Систему можно расширить для QA высоковольтной системы формирования изображений, а также позиционирования радиоактивных источников в брахитерапии. Инструменты программного обеспечения можно реализовать для анализа, оценки и прогнозирования эксплуатационных показателей лечебного блока и целостности приспособлений выравнивания в помещении.
[0050] Фиг. 6 демонстрирует вид, частично выполненный в разрезе, устройства QA согласно варианту осуществления изобретения. Как описано выше со ссылкой на фиг. 5A-5D, фиг. 6 демонстрирует вид, частично выполненный в разрезе, прибора 100. Проиллюстрирован вариант осуществления компоновки 130 внутренних зеркал в корпусе 121. Компоновка 130 внутренних зеркал допускает размещение плоскости 148, изображения, т.е. поверхности 122 формирования изображения, в изоцентре плоскости машины.
[0051] Кроме того, согласно фиг. 6 первое зеркало 152 позиционируется на первой нижней стенке 154 корпуса 121 прибора 100. Второе зеркало 156 позиционируется на второй нижней стенке 158 корпуса 121 прибора 100 и рядом с первым зеркалом 152, расположенным на первой нижней стенке 154. Первое зеркало 152 и второе зеркало 156 разделены углом. Можно использовать любой подходящий угол между ними при условии, что он обеспечивает правильную передачу данных в камеру. Третье зеркало 160 позиционируется в первой плоскости, параллельной второй плоскости, в которой позиционируется второе зеркало 156. Первая плоскость отстоит от второй плоскости на некоторое расстояние. Расстояние может быть любым расстоянием, пригодным для передачи данных в камеру. Прибор также может включать в себя четвертое зеркало 172, расположенное так, что оно защитно экранирует камеру от прямого излучения от медицинского ускорителя. Четвертое зеркало 172 также позиционируется под таким углом, что данные передаются от третьего зеркала 160 в камеру.
[0052] Фиг. 7 демонстрирует схему способа в соответствии с признаками изобретения. Способ 200, в целом, относится к измерениям гарантии механического и дозиметрического качества в реальном времени в лучевой терапии. Способ 200 включает в себя этап 202 обеспечения поверхности формирования изображения для приема множественных источников энергии. В частности, поверхность формирования изображения имеет плоскость формирования изображения, расположенную в одной плоскости с изоцентром медицинского ускорителя. Этап 204 включает в себя направление множественных источников энергии в камеру. Дополнительно этап 206 может включать в себя измерение и регистрацию данных, относящихся к множеству источников энергии.
[0053] Фиг. 8A и 8B дополнительно демонстрируют способы оценки двух из многих критериев QA, подлежащих выполнению на медицинском ускорителе, в соответствии с признаками изобретения. Как показано на фиг. 8A и 8B, множественные источники энергии могут направляться на прибор 300 и таким образом регистрироваться прибором 300. Согласно фиг. 8A пучок 308 излучения из медицинского ускорителя 304 направляется на прибор 300. Пучок 308 излучения направляется на прибор 300, таким образом, что он проходит через поверхность 322 формирования изображения, в данном случае фосфорный люминесцентный экран. Свет 309 от фосфорного люминесцентного экрана затем может измеряться камерой 328, как показано в иллюстративном изображении 310. Затем камера 328 может передавать данные на компьютер 312 для регистрации и анализа через проводное или беспроводное соединение. Согласно фиг. 8B отсековые лазеры 314, 316 в плоскости изоцентра могут направляться на поверхность 322 формирования изображения устройства 300. Фосфорный люминесцентный экран также можно использовать в качестве датчика 318 изображения на плоскости 322 формирования изображения с наложенной шкалой 320 или закодированной цифровыми средствами шкалой. Проекция отсековых лазеров 314, 316 измеряется камерой 328, после чего данные могут передаваться на компьютер (не показан) для регистрации и анализа.
[0054] Фиг. 8C демонстрирует способ осуществления QA позиционирования стола согласно варианту осуществления изобретения. Прежде QA позиционирования стола измерялась визуально. Используется верификация оптического индикатора расстояния (ODI), которая представляет собой верификацию бокового лазера. Лазер, который имитирует источник излучения, светит на прибор изобретения, который позиционируется на столе пациента и повернут на 90°, чтобы видеть боковой отсековый лазер. Правильность позиционирования лазера раньше оценивалась визуально и никакой регистрации позиционирования производиться не могла. С использованием устройства изобретения ODI можно регистрировать и оценивать. Регистрацию также можно сохранять для любого дальнейшего просмотра или верификации правильной работы медицинского ускорителя. Согласно фиг. 8C ODI регистрируется при 90 см, в изоцентре (или 100 см) и при 110 см. На фиг. 8C также проиллюстрирован стол в верхней или поднятой позиции, в изоцентре в нижней или опущенной позиции.
[0055] Фиг. 8D демонстрирует способ осуществления поворота или оптической QA согласно варианту осуществления изобретения. Этот способ измеряет точность поворота коллиматора, и до появления устройства изобретения это измерение QA не регистрировалось. Для проверки поворота коллиматора специалист направляет источник света, который имитирует пучок излучения, на прибор изобретения, который позиционируется на ложе для пациента. Специалист поворачивает коллиматор, чтобы наблюдать, что свет правильно перемещается относительно изоцентра медицинского ускорителя. Согласно фиг. 8D поворот коллиматора измеряется относительно изоцентра (100 см). Поворот коллиматора измеряется при углах поворота 90, 180, 270 и 360°. Используя прибор изобретения, можно регистрировать позицию источника света согласно фиг. 8D.
[0056] Фиг. 8E демонстрирует способ осуществления совмещения оптического и лучевого поля, сформированного посредством многопластинчатого коллиматора. Согласно фиг. 8E прибор изобретения можно использовать для регистрации не только светового поля, сформированного многопластинчатым коллиматором, но и лучевого поля, сформированного посредством многопластинчатого коллиматора. Кроме того, согласно фиг. 8E совмещение светового поля и лучевого поля излучения можно накладывать на изображение излучения для обеспечения точности лучевого поля. Зарегистрированные изображения можно сохранять для демонстрации правильной работы медицинского ускорителя. Дополнительно аналогично способам измерения QA, рассмотренным со ссылкой на фиг. 8C и 8D, способ осуществления оптического и лучевого совмещения прежде не регистрировался.
[0057] Дополнительно программное обеспечение может быть инкорпорировано в систему, работающую согласно изобретению. Инкорпорирование программного обеспечения позволяет дополнительно автоматизировать изобретение, что дополнительно экономит время медицинского физика, осуществляющего QA на медицинском ускорителе. Прибор изобретения может включать в себя микропроцессор, вычислительное устройство или другое средство обеспечения компьютерного управления для прибора, известное специалисту в данной области техники или мыслимое им. Альтернативно программное обеспечение может загружаться на отдельное вычислительное устройство, сервер или удаленный сервер и может передаваться посредством беспроводной связи или проводного соединителя на управляющий прибор, заключенный в корпусе прибора согласно изобретению. Такая установка позволяет управлять множественными приборами QA с помощью одного отдельного вычислительного устройства, сервера или удаленного сервера. Также можно использовать любую другую установку программного управления, известную специалисту в данной области техники или мыслимую им. Прибор также может включать в себя роботизированное управление для преобразования команд перемещения из компьютерной программы в перемещение прибора. Дополнительно работу прибора можно объединить с работой медицинского ускорителя.
[0058] Например, в отношении механических признаков программное обеспечение можно использовать для управления или измерения, по меньшей мере, коллинеарности и схождения лазеров, перемещения стола и оптического индикатора расстояния, а также перемещения коллиматора. В отношении признаков излучения программное обеспечение можно использовать для управления или измерения, по меньшей мере, конгруэнтности поля света и излучения, постоянства профиля излучения и постоянства энергии. Конгруэнтностью поля света и излучения можно управлять, по меньшей мере, в отношении рентгеновских пучков, плоскостности и симметрии и коэффициента подобия. Постоянством профиля излучения можно управлять, по меньшей мере, в отношении электронных пучков, и постоянством энергии можно управлять, по меньшей мере, в отношении рентгеновских и электронных пучков.
[0059] Другой инструмент программного обеспечения может быть выполнен с возможностью настройки камеры. При осуществлении анализа QA специалист может использовать программное обеспечение для настройки камеры, в том числе, но без ограничения, для настройки времени интеграции и количества получаемых кадров. Параметры настройки можно сохранять в виде файла для дополнительного рационализации тестирования QA. Например, параметры настройки для тестирования QA в отношении оптического поля можно сохранять в виде файла, тогда как параметры настройки для тестирования QA в отношении лучевого поля можно сохранять в виде отдельного файла. Когда специалист готов включиться в какой-либо протокол тестирования QA, он может использовать эти сохраненные файлы программного обеспечения для конфигурирования камеры по параметрам настройкам, соответствующим типу тестирования. Эти файлы параметров настройки можно датировать таким образом, чтобы специалист знал, какой файл является самым последним. Файл также можно вызывать на вычислительном устройстве, чтобы специалист мог наблюдать и верифицировать параметры настройки при вызове файла для просмотра на экране вычислительного устройства.
[0060] Программное обеспечение также может быть выполнено с возможностью управления получением изображения. Однако при желании специалист все же может вручную получать изображения с использованием камеры. В иллюстративном получении изображения специалист может выбирать вышеописанный файл настройки, получать изображение и давать имя этому изображению для его сохранения на жестком диске или сетевом диске вычислительного устройства. После того, как изображение названо и сохранено, оно может оставаться на экране, что позволяет специалисту выполнять различные задачи анализа с использованием программного обеспечения.
[0061] В целях простого, экономичного и эффективного анализа изображений программное обеспечение может быть выполнено с возможностью отображения аппаратно запрограммированной цифровой шкалы изображения согласно фиг. 9. Цифровую шкалу изображения можно накладывать на полученное изображение, и специалист также имеет возможность подстраивать цифровую шкалу изображения.
[0062] Фиг. 10 демонстрирует инструмент анализа, обеспеченный программой управления, реализованной программными средствами, для прибора согласно изобретению. Согласно фиг. 10 инструмент анализа может ограничить круг 400 диаметром 10 пикселей в точке, представляющей интерес, в изображении, полученном с использованием прибора согласно изобретению. Положение пикселя, представляющее интерес также можно регистрировать с использованием программы управления, реализованной программными средствами, в соответствии с требованиями для различных задач QA. Следует отметить, что диаметр круга может составлять количество пикселей, которое специалист в данной области техники находит подходящим.
[0063] Фиг. 11 демонстрирует инструмент локализации, обеспеченный программой управления, реализованной программными средствами, для прибора согласно изобретению. Согласно фиг. 11 инструмент локализации может ограничить первый круг 500 диаметром 10 пикселей. Затем инструмент локализации позволяет специалисту перетащить линию 502 во вторую точку, представляющую интерес, где можно ограничить второй круг 504. Для регулировки размещения инструмента анализа линию 502 можно растягивать или сокращать. Тогда программа, реализованная программными средствами может быть выполнена с возможностью определения и отображения количества пикселей, определенных линией. При наличии шкалы программу, реализованную программными средствами, можно использовать для демонстрации длины линии 502 в мм.
[0064] Фиг. 12 демонстрирует инструмент области, представляющей интерес, обеспеченный программой, реализованной программными средствами, для прибора согласно изобретению. Инструмент 600 области, представляющей интерес, может принимать форму квадрата с перекрестием 602. Предпочтительно инструмент 600 области, представляющей интерес, составляет 20 или более пикселей в диаметре в зависимости от разрешения камеры, что составляет около 5 мм. Однако инструмент области, представляющей интерес, может быть выполнен с возможностью использовать любой другой подходящий размер, известный специалисту в данной области техники или мыслимый им. Инструмент 600 области, представляющей интерес, может представлять собой инструмент перетаскивания и ограничения, что позволяет специалисту перемещать его между различными участками изображения. Соответствующие инструменты могут включать в себя возможность выбора пикселей в точке пересечения перекрестия. Можно также вычислять статистику изображения, например среднюю интенсивность пикселя, а также стандартное отклонение. Дополнительно программное обеспечение может быть выполнено с возможностью сохранения имени пользователя и даты на изображении, а также любой конкретной информации, касающейся координат и статистики пикселя.
[0065] Фиг. 13 демонстрирует иллюстративный экран для задания шкалы в полученном изображении, снятом с использованием прибора согласно изобретению. В примере специалист получает оптимальное изображение 700, прикладывает цифровую шкалу 702 изображения, описанную со ссылкой на фиг. 9, и устанавливает изображение цифровой шкалы. Затем специалист может вызвать инструмент линейки для вычерчивания линии 704. При вызове инструмента линейки может открываться диалоговое окно, запрашивающее расстояние линии в мм. Специалист может подтверждать расстояние, и программа вычисляет шкалу в мм/пиксель. Программу также можно использовать для датирования и сохранения изображения шкалы. Шкала, созданная с использованием этого процесса, считается принятой по умолчанию, пока не будет повторно измерена и обновлена.
[0066] Фиг. 14A демонстрирует пример программного признака для наложения изображений, снятых посредством прибора согласно изобретению. Функциональная клавиша “наложение” извлекает количество n изображений и накладывает изображения друг на друга согласно фиг. 14A. В частности, фиг. 14A демонстрирует пример с двумя лазерными изображениями с наложенной картой изображения линейки. Фиг. 14B демонстрирует иллюстративную запись лазерной QA для анализа коллинеарности лазера с использованием прибора согласно изобретению. Если линии лазера в изображении образуют прямую, медицинский ускоритель принимает индикатор прохождения, в противном случае медицинский ускоритель принимает индикатор неудачи.
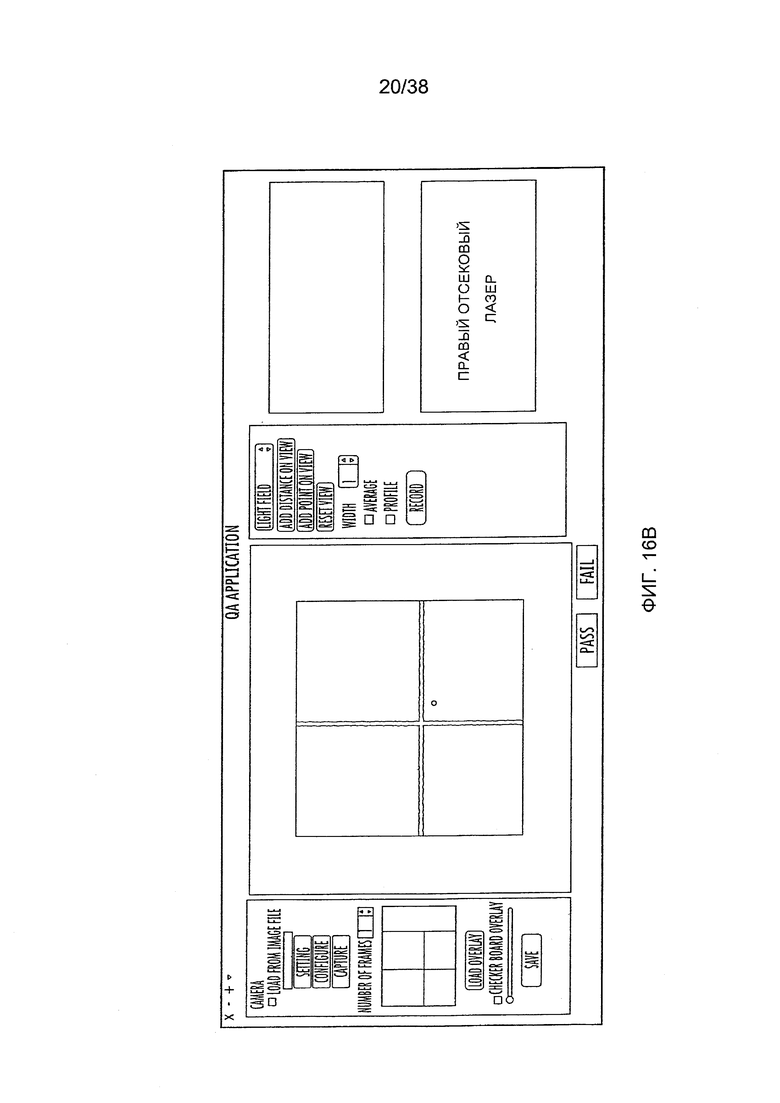
[0067] Фиг. 15-19 демонстрируют иллюстративные примеры регистрации лазерных задач QA, выполняемых посредством прибора согласно изобретению. Например, фиг. 15 и 16A демонстрируют получение левой и правой боковой лазерной QA с помощью прибора согласно изобретению. Специалист может выбирать лазерные задачи QA из просматриваемого меню. В этом случае список лазерных задач QA включает в себя варианты осуществления QA для левой стороны отсека, правой стороны отсека, потолка отсека и задней стены отсека. Для левой и правой боковой QA программа предписывает специалисту получить изображение лазера в изоцентре. Затем специалист локализует перекрестие лазера с использованием инструмента пиксельного анализа, описанного со ссылкой на фиг. 10. Затем специалист может называть и сохранять изображение. Затем специалисту предписывается получить второе лазерное изображение после перемещения ложа для лечения приблизительно на 10 см к лазеру. Затем специалист получает второе изображение лазера и локализует перекрестие лазера с использованием инструмента пиксельного анализа. Это изображение также получает имя и сохраняется. Фиг. 16B демонстрирует иллюстративный вариант осуществления пользовательского интерфейса, демонстрирующий получение QA правого отсекового лазера, как описано со ссылкой на фиг. 16A.
[0068] Фиг. 17 и 18 демонстрируют получение QA бокового лазера потолка и задней стены соответственно с использованием прибора согласно изобретению. В этих примерах специалист получает изображение лазеров потолка и задней стены в изоцентре. Согласно фиг. 17 специалист локализует перекрестие лазера и называет и сохраняет лазерное изображение потолка. Затем специалист может локализовать точку пересечения лазеров задней стены и потолка согласно фиг. 18. Затем специалист может получить еще одно изображение после перемещения ложа для лечения к потолку на 10 см. Процедуры локализации, присвоения имени и сохранения для упомянутого изображения можно повторять.
[0069] Фиг. 19 и 20 демонстрируют анализ лазерного выравнивания с использованием прибора согласно изобретению. Специалист может запросить, чтобы программа осуществила лазерный анализ с использованием меню программы. Программа будет комбинировать положения изоцентров для перекрестий всех лазеров в 2D или 3D виде. Программа будет указывать лазеры как индикатор прохождения, если они содержатся в пределах диаметра 2 мм, согласно фиг. 19. Затем программа дифференцирует коллинеарность для каждого направления лазера из парных лазерных изображений согласно фиг. 20. Программа будет указывать лазеры как индикатор прохождения, если линия содержится в цилиндре диаметром 2 мм, проходящем ортогонально изоцентру на 20 см.
[0070] Фиг. 21A-F, 22A-F и 23A-C демонстрируют иллюстративные примеры регистрации задач QA перемещения стола и оптического индикатора расстояния (ODI), выполняемых посредством прибора согласно изобретению. Фиг. 21A-F относятся к QA для вертикальных перемещений стола, захватываемых с использованием прибора согласно изобретению. Программу можно использовать для настройки окна QA горизонтальным для получения изображения ODI при расстоянии источник-кожа (SSD) 110 см согласно фиг. 21A. Окно также можно настраивать вручную и обрабатывать изображения с использованием программы. Затем окно QA поворачивается вертикально 90° для получения левого или правого лазерного изображения при расстоянии источник-кожа (SSD) 110 см согласно фиг. 21B. Эта процедура повторяется для SSD 100 см согласно фиг. 21C и 21D и 90 см согласно фиг. 21E и 21F. Все изображения могут получать имена и сохраняться. Функцию наложения, описанную выше со ссылкой на фиг. 14, можно использовать для измерения вертикального расстояния локализованного лазера относительно цифровой шкалы. Можно также использовать инструмент линейки. Программа будет указывать эту QA как индикатор прохождения, если дельта расстояния находится в пределах 1 мм.
[0071] Фиг. 22A-F относятся к QA для боковых перемещений стола, выполняемых посредством прибора согласно изобретению. Программу можно использовать для настройки окна QA горизонтальным для получения изображения оптического поля при SSD 100 см согласно фиг. 22A. Окно также можно настраивать вручную и обрабатывать изображения с использованием программы. Специалисту также нужно получить изображение потолочного лазера согласно фиг. 22B. Процедуры повторяются для перемещения стола на 10 см влево от центра согласно фиг. 22C и 22D и на 10 см вправо от центра согласно фиг. 22E и 22F. Функцию наложения, описанную выше со ссылкой на фиг. 14, можно использовать для измерения вертикального расстояния локализованного лазера по цифровой шкале. Можно также использовать инструмент линейки. Программа будет указывать упомянутую QA как индикатор прохождения, если дельта расстояния находится в пределах 1 мм.
[0072] Фиг. 23A-C демонстрируют визуальные результаты QA поворота стола с использованием прибора согласно изобретению. Окно QA настраивается горизонтально в изоцентре медицинского ускорителя, либо вручную, либо с использованием программы. Оптические изображения светового поля получаются при поворотах стола на 180°, 90° и 270° согласно фиг. 23A-C соответственно или на любые произвольные, но известные углы. Перекрестия локализуются в каждом изображении, и изображение снабжается ярлыком и сохраняется. Изображения можно накладывать с использованием признака, рассмотренного со ссылкой на фиг. 14. Локализованное перекрестие должно находиться в круге диаметром 2 мм, чтобы система прошла этот анализ QA.
[0073] Согласно фиг. 24A-D QA поворота коллиматора выполняется во многом так же, как QA поворота стола, с использованием прибора согласно изобретению. Окно QA настраивается горизонтально в изоцентре медицинского ускорителя, либо вручную, либо с использованием программы. Оптические изображения светового поля получается при поворотах коллиматора на 180°, 0°, 90° и 270° согласно фиг. 24A-D соответственно или на любые произвольные, но известные углы. Перекрестия локализуются в каждом изображении, и изображение снабжается меткой и сохраняется. Изображения можно накладывать с использованием признака, рассмотренного со ссылкой на фиг. 14. Локализованное перекрестие должно находиться в круге диаметром 2 мм, чтобы система прошла этот анализ QA.
[0074] Фиг. 25A-D, 26, 27A и 27B и 28A и 28B демонстрируют визуальные результаты QA конгруэнтности лучевого поля и светового поля с использованием прибора согласно изобретению. В целом, для получения лучевого поля, которое может выполняться вручную или с использованием программы управления прибором, настройка камеры излучения выбирается для получения изображения темнового тока при срабатывании затвора камеры в течение 15 с или 3×15 с. Экспонирование излучению получается для одной и той же настройки экспозиции, и применяется коррекция неоднородности объектива камеры, если применима. Среднее изображение темнового тока можно вычесть из “скорректированного” среднего изображения излучения.
[0075] В частности, согласно фиг. 25A-25D инструмент конгруэнтности лучевого/светового поля можно использовать для продуцирования изображений, аналогичных примерам, показанным на фиг. 25A и 25B. Настройка оптической камеры выбирается вручную или с использованием программы управления прибора для получения светового поля при текущих размерах, например 20 см×20 см. Также можно использовать ранее сохраненное изображение. Затем программу можно использовать для обнаружения границы светового поля. Настройка камеры излучения используется для получения и обработки темнового тока и лучевого поля для одних и тех же размеров. Затем можно обнаруживать границу лучевого поля при уровне интенсивности 50%. Затем границу светового поля и границу лучевого поля можно совмещать и можно называть и сохранять изображение. Фиг. 25C демонстрирует иллюстративный вариант осуществления пользовательского интерфейса, демонстрирующий получение рентгеновской QA 6 МВ, как описано со ссылкой на фиг. 25A и 25B. Фиг. 25D демонстрирует другой пример конгруэнтности изображений светового поля и лучевого поля, полученных с использованием прибора согласно изобретению.
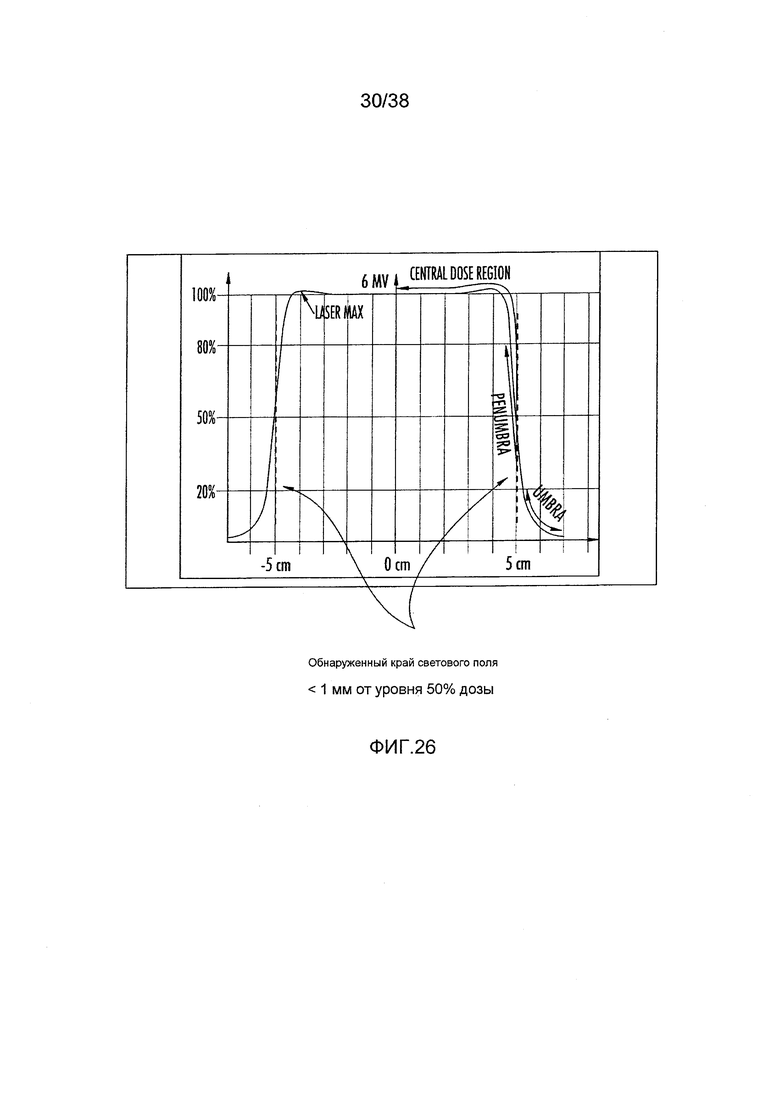
[0076] Фиг. 26 демонстрирует график, полученный с использованием инструмента профиля в программе управления для прибора согласно изобретению. Чтобы использовать инструмент профиля нужно получить изображение излучения. Затем программу можно попросить отобразить 1D график x- или y-профилей, например, в виде графика на фиг. 26. На графике также могут быть указаны границы 600 светового поля. График можно использовать для вычисления плоскостности, симметрии и коэффициента однородности согласно формулам. График и результаты можно сохранять для ссылки в будущем.
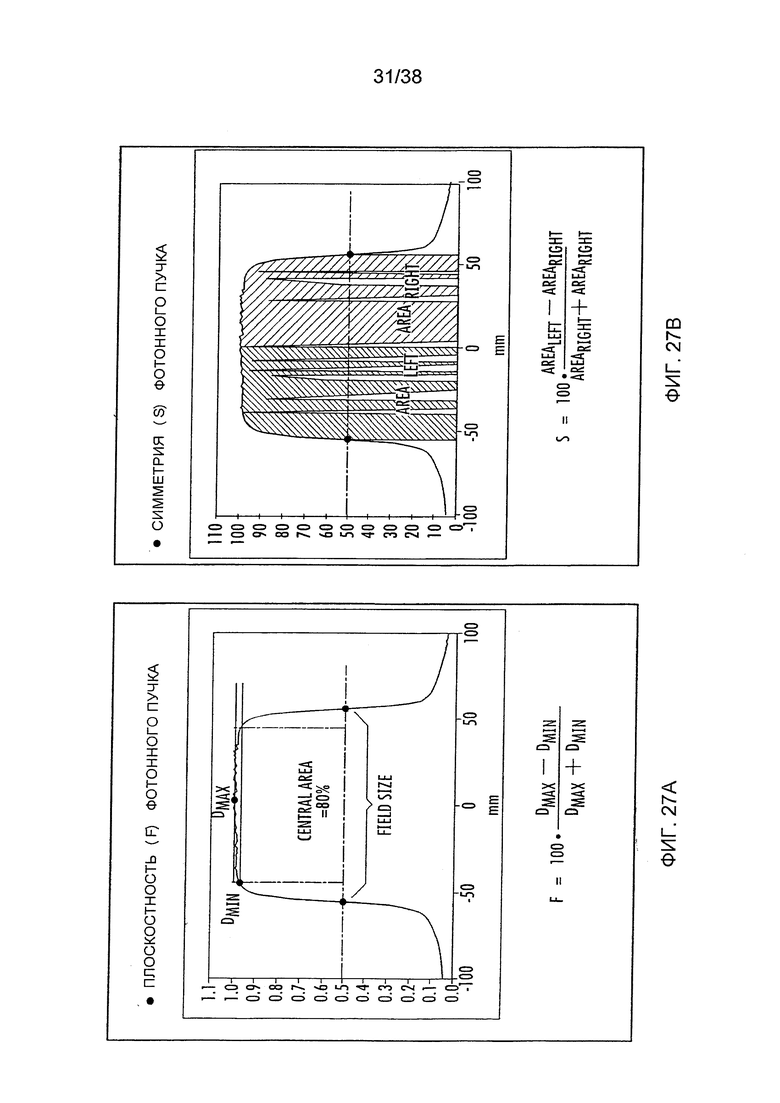
[0077] Фиг. 27A и 27B демонстрируют иллюстративные графики для демонстрации способов вычисления для определения плоскостности и симметрии фотонного пучка с использованием 1D графика, аналогичного графику, проиллюстрированному на фиг. 26. Вычисление плоскостности (F) фотонного пучка проиллюстрировано на фиг. 27A, где F=100*(Dmax-Dmin)/Dmax+Dmin). Вычисление симметрии (S) проиллюстрировано на фиг. 27B, где S=100*(arealeft-arearight)/(arealeft+arearight). График и результаты можно сохранять для ссылки в будущем.
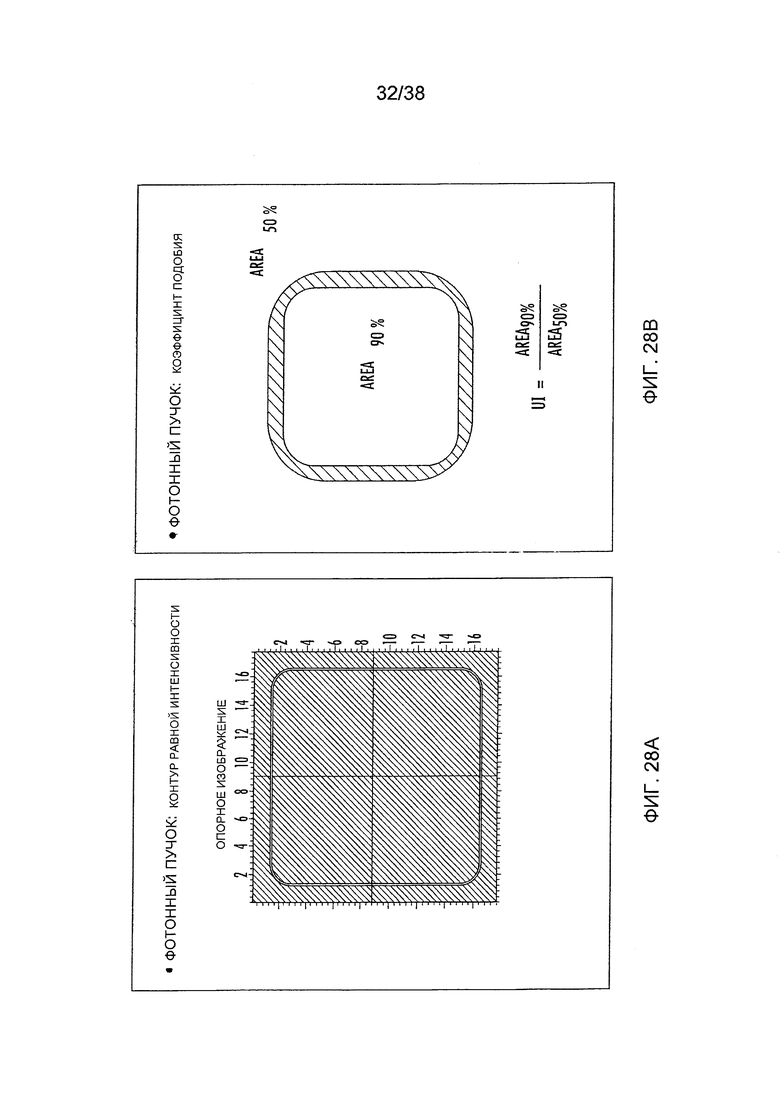
[0078] Фиг. 28A и 28B демонстрируют визуальные представления измерений излучения, снятые с использованием прибора согласно изобретению. Фиг. 28A демонстрирует визуальное представление лучевого поля, и фиг. 28B демонстрирует вычисление коэффициента однородности (UI), где UI=(area90%)/(area50%). График и результаты можно сохранять для ссылки в будущем.
[0079] Фиг. 29, 30A и 30B демонстрируют визуальные представления получения и анализа лучевого поля. Следует отметить, что, когда лучевые поля изображаются с использованием прибора настоящей системы, также одновременно можно снимать измерение на пленку. Затем отношение измерения на пленке к измерению от камеры прибора согласно изобретению можно использовать для обеспечения карты однократной коррекции, которую можно использовать для каждого тестового измерения. В частности, фиг. 29 демонстрирует визуальное представление среднего изображения излучения, снятого с использованием прибора согласно изобретению. Прибор может измерять любое лучевое поле, например, рентгеновское в 4, 6, 8, 10, 15 или 18 МВ или электронные пучки в 6, 8, 10, 12, 15 и 18 МэВ. Изображения темнового тока и излучения получаются согласно вышеописанным протоколам. Затем изображения обрабатываются программой для создания среднего изображения излучения. Изображение можно снабжать именем и сохранять для дальнейшей ссылки или дополнительных вычислений, например, плоскостности, симметрии и коэффициента однородности, все из которых описаны выше.
[0080] Фиг. 30A и 30B демонстрируют иллюстративные визуальные представления проверок энергии для анализа излучения. Для осуществления проверок энергии специалист получает пару надлежащих средних изображений излучения, снятых при разных значениях толщины материала, например, пластиковой пластины, содержащей воду (plastic water) или искусственной воды без пузырьков. Область, представляющая интерес, позиционируется в центре изображения излучения, например, показание 1 (R1) и показание 2 (R2) на фиг. 30A и 30B. R1= средний отсчет для области, представляющей интерес, для первого изображения, и R2= средний отсчет для области, представляющей интерес, для второго изображения. Отношение постоянных энергии =R1/R2. Эти результаты также можно снабжать именами и сохранять для использования или ссылки в будущем.
[0081] Фиг. 31, 32A-B и 33A-B демонстрируют визуальные представления и анализ измерений QA многопластинчатого коллиматора (MLC), снятых с использованием прибора согласно изобретению. Эти анализы гарантируют точность позиционирования MLC при использовании доставки частокола и точности скорости пластин. Со ссылкой на фиг. 31 и 32A-B, которые демонстрируют визуальное представление анализов частокола, изображение частокола получается за счет настройки времени интегрирования камеры равным 30 с или более. Формирование изображения начинается, и специалист запускает щелевой пучок, сформированный посредством X1, X2 многопластинчатого коллиматора (MLC) на текущем этапе, и режим съемки для доставки излучения в известные позиции в поле. После остановки доставки и формирования изображения можно анализировать позиционную точность зазора между пластинами, как на фиг. 31 и 32A-B.
[0082] Фиг. 33A и 33B демонстрируют визуальные представления измерения и анализа скорости пластин многопластинчатого коллиматора (MLC). Изображение получается за счет настройки времени интегрирования камеры равным 30 с или более. Формирование изображения начинается, и специалист запускает каждую пару пластин с разными скоростями через поле для доставки разных доз для каждой пары пластин. После остановки доставки и формирования изображения можно анализировать позиционную точность профиля дозы, как на фиг. 33A-B.
[0083] Вышеописанные инструменты программного обеспечения для автоматизации процесса QA и анализа изображения, снятого посредством прибора согласно изобретению, являются иллюстративными и не подлежат рассмотрению в порядке ограничения. Можно разработать много других инструментов обеспечения для дополнительной автоматизации процесса и обеспечения анализа изображений. Программа управления для изобретения также может быть выполнена с возможностью продуцирования отчета, где кратко описываются все выполненные измерения QA и результаты этих измерений.
[0084] Фиг. 34 демонстрирует ионизационную камеру для использования с прибором для QA медицинского ускорителя согласно варианту осуществления изобретения. Ионизационная камера 800 может принимать форму пластиковых пластин 802, содержащих воду (plastic water), расположенных на поверхности устройства 804. Пластины 802 (plastic water) могут иметь толщину до 10 см. Дополнительно одна пластина может включать в себя датчик 806 для ионизационной камеры 808 (без ссылочной позиции на фиг. 34). Датчик 808 может быть ввернут под углом 45° к оси x-y камеры 800. Эта конфигурация позволяет осуществлять калибровку TG51.
[0085] Хотя изобретение описано в связи с предпочтительными вариантами его осуществления, специалистам в данной области техники очевидно, что можно предложить дополнения, изъятия, модификации и замены, конкретно не описанные, не выходя за рамки сущности и объема изобретения, определенные в нижеследующей формуле изобретения.
Изобретение относится к лучевой терапии, а в частности к гарантии механического и дозиметрического качества в лучевой терапии. Прибор для унификации контроля качества механических и дозиметрических измерений в реальном времени в лучевой терапии содержит корпус, поверхность формирования изображения для приема множественных источников энергии, множественные источники энергии, включающие в себя оптические источники света и поля излучения; механизм для поворота, непосредственно соединенный с корпусом, так что поверхность формирования изображения вращается вокруг оси через изоцентр медицинского ускорителя, камеру для измерения и регистрации данных, связанных с множественными источниками энергии, при этом камера стационарна по отношению к поверхности формирования изображения; и систему зеркал, размещенных в корпусе, для направления множественных источников энергии от поверхности формирования изображения к камере. Технический результат – унификация измерения механического движения и компонента излучения медицинских ускорителей. 2 н. и 26 з.п. ф-лы, 34 ил.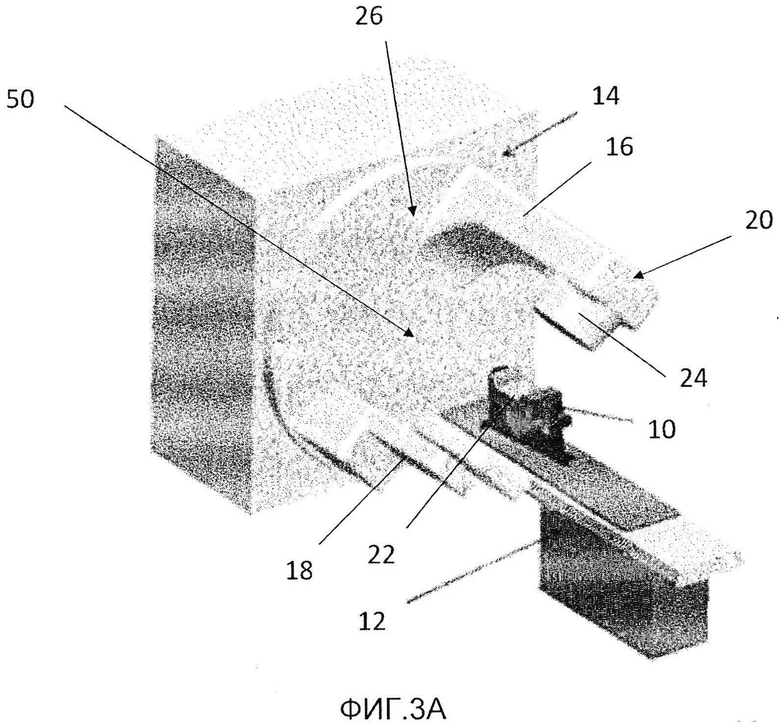
1. Прибор для унификации контроля качества механических и дозиметрических измерений в реальном времени в лучевой терапии, содержащее:
корпус,
поверхность формирования изображения для приема множественных источников энергии, причем упомянутая поверхность формирования изображения соединена с корпусом так, что упомянутая поверхность формирования изображения размещена на той же плоскости, что и плоскость через изоцентр медицинского ускорителя, а множественные источники энергии содержат оптические источники света и поля излучения;
механизм для поворота, непосредственно соединенный с корпусом, так что поверхность формирования изображения вращается вокруг оси через изоцентр медицинского ускорителя,
камеру для измерения и регистрации данных, связанных с множественными источниками энергии, при этом камера стационарна по отношению к поверхности формирования изображения; и
систему зеркал, размещенных в корпусе, для направления множественных источников энергии от поверхности формирования изображения к камере, причем упомянутая система зеркал также выполнена с возможностью поддержания плоскости формирования изображения камеры в изоцентре медицинского ускорителя, причем система зеркал сконфигурирована с возможностью вращения вокруг оси через изоцентр медицинского ускорителя с корпусом.
2. Прибор по п. 1, в котором камера стационарна и позиционирована на одной оси с плоскостью формирования изображения.
3. Прибор по п. 1, дополнительно содержащий компьютерную систему для сбора и анализа данных.
4. Прибор по п. 3, в котором компьютерная система включает в себя контур обратной связи для автоматического управления прибором.
5. Прибор по п. 1, в котором измерения производятся в реальном времени.
6. Прибор по п. 1, в котором система зеркал не включает в себя ни одного зеркала или включает в себя одно или более зеркал для направления множественных источников энергии в камеру.
7. Прибор по п. 6, в котором одно или более зеркал фиксированы.
8. Прибор по п. 6, в котором одно или более зеркал подвижны.
9. Прибор по п. 1, в котором поверхность формирования изображения способна вращаться вокруг оси камеры.
10. Прибор по п. 1, в котором единый фосфорный люминесцентный экран или пластина пластикового сцинтиллятора будет использоваться для приема множественных источников энергии от рентгеновских, электронных, световых и лазерных пучков.
11. Прибор по п. 10, в котором фосфорный люминесцентный экран или пластина пластикового сцинтиллятора включает в себя метки для пространственной калибровки.
12. Прибор по п. 1, в котором упомянутая система зеркал способна вращаться для захвата данных из разных углов гентри.
13. Прибор по п. 1, который запрограммирован перемещаться синхронно с механическими компонентами медицинского ускорителя относительно изоцентра.
14. Прибор по п. 1, в котором камера содержит традиционную камеру.
15. Прибор по п. 14, в котором зеркало выполнено с возможностью защищать камеру от излучения.
16. Прибор по п. 1, в котором камера содержит камеру, устойчивую к излучению.
17. Прибор по п. 1, в котором камера содержит плоскопанельный детектор.
18. Прибор по п. 1, дополнительно содержащий вычислительное устройство, выполненное с возможностью управления перемещением прибора.
19. Прибор по п. 18, в котором вычислительное устройство запрограммировано для автоматизации протокола гарантии качества, подлежащего выполнению с использованием прибора.
20. Прибор по п. 18, в котором вычислительное устройство выполнено с возможностью автоматизации перемещения прибора совместно с перемещением медицинского ускорителя.
21. Прибор по п. 1, дополнительно содержащий, по меньшей мере, одну пластиковую пластину, содержащую воду.
22. Прибор по п. 21, в котором, по меньшей мере, одна пластиковая пластина, содержащая воду, может вмещать в себя ионизационную камеру.
23. Прибор по п. 22, в котором, по меньшей мере, одна пластиковая пластина, содержащая воду, содержит приемник для ионизационной камеры, ввернутый в, по меньшей мере, одну пластиковую пластину, содержащую воду, под углом 45°.
24. Способ контроля качества механических и дозиметрических измерений в реальном времени в лучевой терапии, содержащий этапы, на которых:
обеспечивают поверхность формирования изображения для приема множественных источников энергии, причем упомянутая поверхность формирования изображения расположена на верхней поверхности корпуса, при этом поверхность формирования изображения имеет плоскость формирования изображения, расположенную в одной плоскости с изоцентром медицинского ускорителя;
вращают поверхность формирования изображения вокруг оси через изоцентр медицинского ускорителя с механизмом для поворота, непосредственно соединенным с корпусом,
направляют множественные источники энергии в камеру; и
измеряют и регистрируют данные, относящиеся к множественным источникам энергии.
25. Способ по п. 24, дополнительно содержащий поверхность формирования изображения, принимающую форму фосфорного люминесцентного экрана, выполненного с возможностью приема всех сигналов оптического света, лазерного света и излучения.
26. Способ по п. 25, дополнительно содержащий цифровой чувствительный элемент, выполненный с возможностью оставаться стационарным относительно фосфорного люминесцентного экрана.
27. Способ по п. 25, в котором сигналы оптического света, лазерного света и излучения направляются на фосфорный люминесцентный экран по оптическому пути.
28. Способ по п. 27, в котором оптический путь дополнительно содержит зеркала, выполненные с возможностью направлять сигналы оптического света, лазерного света и излучения от люминесцентного экрана на стационарную камеру.
| JP 2004024387 A, 29.01.2004 | |||
| US 2009207977 A1, 20.08.2009 | |||
| WO 2007012147 A2, 01.02.2007 | |||
| Стыковое соединение элементов сборных железобетонных конструкций | 1956 |
|
SU108940A2 |

