ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[0001] Настоящая заявка заявляет преимущество приоритета предварительной заявки на патент США № 62/186743, поданной 30 июня 2015, полное содержание которой включено в настоящую заявку по ссылке.
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
[0002] Настоящее раскрытие, в общем, относится к лучевой терапии или радиотерапии. Более конкретно, настоящее раскрытие относится к системам и способам определения отслеживания целевого органа во время лучевой терапии.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0003] Радиотерапия используется для лечения рака и других болезней в ткани млекопитающих (например, людей и животных). Одной такой технологией радиотерапии является гамма-нож, посредством которого пациента облучают большим количеством низкоинтенсивных гамма-лучей, которые сходятся с высокой интенсивностью и высокой точностью у целевого объекта (например, опухоли). В другом варианте осуществления радиотерапия обеспечивается с использованием линейного ускорителя, посредством которого опухоль облучается высокоэнергетичными частицами (например, электронами, протонами, фотонами, ионами и т.п.). Расположением и дозой пучка излучения необходимо точно управлять для обеспечения того, чтобы опухоль принимала назначенное излучение, и расположение пучка должно быть таким, чтобы было минимизировано повреждение окружающей здоровой ткани, часто называемой органом (органами) риска (ОР). Кроме того, в еще одном варианте осуществления радиотерапия может быть обеспечена короткофокусной лучевой терапией, которая позволяет обеспечивать высокие дозы облучения внутренним образом в конкретных областях тела.
[0004] При использовании внешней лучевой терапии пучок излучения может быть сформирован в соответствии с формой опухоли, например, с использованием многолепесткового коллиматора (например, многолепестковый коллиматор включает в себя множественные вольфрамовые лепестки, которые могут перемещаться независимо друг от друга для создания настраиваемых форм пучка излучения). (Излучение называется «назначенным», поскольку врач назначает заданную дозу облучения для опухоли и окружающих органов подобно назначению лекарственного средства).
[0005] Традиционно, для каждого пациента план лечения лучевой терапией («план лечения») может быть создан с использованием технологии оптимизации, основанной на клинических и дозиметрических целях и ограничениях (например, максимальная, минимальная и средняя дозы облучения для опухоли и критических органов). Процедура планирования лечения может включать в себя использование трехмерного изображения пациента для идентификации целевой области (например, опухоли) и для идентификации критических органов вблизи опухоли. Каждая структура (например, целевой объект, опухоль, ОР и т.д.) может быть дискретизирована в конечное число объемных кубиков, известных как вокселы. Создание плана лечения может быть продолжительным процессом, в котором планировщик старается подчиняться различным целям лечения или ограничениям (например, целям гистограммы доза-объем (ГДО)), с учетом их отдельной важности (например, веса), для создания плана лечения, который является клинически приемлемым. Эта задача может быть продолжительным процессом проб и ошибок, который усложняется различными органами риска (ОР), поскольку число ОР увеличивается (например, вплоть до тринадцати или более для лечения головы и шеи), и, таким образом, увеличивается сложность процесса. ОР, удаленные от опухоли, можно легко уберечь от облучения, в то время как ОР, близкие к перекрывающие целевую опухоль, может быть сложно уберечь.
[0006] Визуализация с помощью компьютерной томографии (КТ) традиционно служит в качестве основного источника данных изображений для планирования лечения для лучевой терапии. КТ-изображения обеспечивают точное представление геометрии пациента, и КТ-значения могут быть прямо преобразованы в плотности электронов (например, единицы Хаунсфилда) для вычисления дозы облучения. Однако использование КТ вынуждает подвергать пациента воздействию дополнительной дозы облучения. Дополнительно к КТ-изображениям сканограммы магнитно-резонансной томографии (МРТ) могут быть использованы в лучевой терапии вследствие их лучшего контрастирования мягких тканей по сравнению с КТ-изображениями. МРТ свободна от ионизирующего излучения и может быть использована для получения функциональной информации о человеческом теле, например, о метаболизме и функциональности тканей.
[0007] Системы визуализации, такие как системы компьютерной томографии (КТ), ультразвуковые системы, системы рентгеноскопии, и системы магнитно-резонансной томографии (МРТ) могут быть использованы для определения местоположения целевого объекта и отслеживания целевого объекта (например, органа, опухоли, и т.п.). МРТ может быть использована, поскольку она обеспечивает превосходное контрастирование мягких тканей без использования ионизирующего излучения, используемого КТ. Пример радиотерапевтической системы лечения, интегрированной с системой визуализации, может включать в себя аппарат МРТ-Linac, который может использовать трехмерные (3D) изображения целевого объекта (например, опухоли). МРТ-устройство аппарата МРТ-Linac может обеспечить множество изображений, которое соответствует частичной карте ядер водорода в тканях пациента. Изображения пациента могут быть получены в одномерной (1D) линии, двумерной (2D) плоскости, или в трехмерном (3D) объеме. Поскольку органы и опухоли перемещаются внутри тела пациента, быстрая и точная трехмерная локализация целевого объекта является важной. Например, целевой орган или опухоль может перемещаться вследствие разных типов перемещений (например, респираторного, сердечного, перистальтического или других типов перемещений пациента).
[0008] Результаты лечения зависят от многих факторов. Эти факторы включают в себя точное оконтуривание целевого объекта, точное вычисление и доставку дозы, точную коллимацию пучка излучения, и точное позиционирование пациента, что включает в себя точную локализацию перемещающейся опухоли. Обычно как система размещения пациента, так и система мониторинга во время облучения для лечения лучевой терапией использует локализацию изображения с использованием костных ориентиров, опорных меток или мягких тканей.
[0009] Изображения анатомии пациента, полученные в разные моменты времени, могут быть проанализированы для определения перемещения этой анатомии в течение периода вмешательства. Это может быть осуществлено в промежутках между изображениями одной и той же модальности или между изображениями разных модальностей. Человек-оператор, контролирующий положение пациента, имеет проблемы невнимания и не может обеспечить коррекцию в режиме реального времени. Таким образом, полезно применять способы анализа изображений для локализации анатомии и настройки лечения (например, логического управления аппаратом Linac или перемещения MLC) в режиме реального времени. Однако большинство алгоритмов локализации не обеспечивает информацию о том, являются ли результаты локализации адекватными для определения перемещения целевого объекта. Таким образом, необходимы способ и система, которые могут быстро, эффективно, и автоматически определять в режиме реального времени качество локализации целевого объекта в изображении, которые могут обеспечить информацию в отношении того, может ли считаться надежным решение лечения (настраивать или нет).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0010] В одном аспекте настоящее раскрытие включает в себя способ обучения классификатора для определения качества локализации целевого объекта по множеству изображений, полученных устройством визуализации во время лечения пациента лучевой терапией. Способ может включать в себя определение результата локализации, указывающего местоположение целевого объекта на множестве изображений, представляющих изображения, полученные в сеансе лечения лучевой терапией. Способ может также включать в себя определение показателя качества для каждого результата локализации. Способ может дополнительно включать в себя извлечение одного или более признаков из каждого результата локализации. Дополнительно, способ может включать в себя обучение классификатора с использованием результата локализации и одного или более из извлеченных признаков.
[0011] В другом аспекте настоящее раскрытие включает в себя способ определения качества локализации целевого объекта по множеству изображений, полученных устройством визуализации во время лечения пациента лучевой терапией. Способ может включать в себя определение результата локализации, указывающего местоположение целевого объекта на множестве изображений, полученных во время лечения пациента лучевой терапией. Способ может также включать в себя определение качества локализации у результата локализации для отслеживания местоположения целевого объекта с использованием классификатора. Способ может дополнительно включать в себя обеспечение пользователя указанием на качество локализации или осуществление связанного с лечением действия на основе качества локализации.
[0012] В дополнительном аспекте настоящее раскрытие включает в себя систему для обучения классификатора для определения качества локализации целевого объекта по множеству изображений, полученных устройством визуализации во время лечения пациента лучевой терапией. Система может включать в себя память для хранения исполняемых компьютером команд. Система может также включать в себя процессор, соединенный с возможностью связи с памятью. Исполняемые компьютером команды, будучи исполняемыми процессором, могут заставлять процессор выполнять различные операции. Операции могут включать в себя определение результата локализации, указывающего местоположение целевого объекта на множестве изображений, представляющих изображения, полученные в сеансе лечения лучевой терапией. Операции могут также включать в себя определение показателя качества для каждого результата локализации. Операции могут дополнительно включать в себя извлечение одного или более признаков из каждого результата локализации. Дополнительно, операции могут включать в себя обучение классификатора с использованием результата локализации и одного или более из извлеченных признаков.
[0013] В другом аспекте настоящее раскрытие включает в себя систему для определения качества локализации целевого объекта по множеству изображений, полученных устройством визуализации во время лечения пациента лучевой терапией. Система может включать в себя память для хранения исполняемых компьютером команд. Система может также включать в себя процессор, соединенный с возможностью связи с памятью. Исполняемые компьютером команды, будучи исполняемыми процессором, могут заставлять процессор исполнять различные операции. Операции могут включать в себя определение результата локализации, указывающего местоположение целевого объекта на множестве изображений, полученных во время лечения пациента лучевой терапией. Операции могут также включать в себя определение качества локализации у результата локализации для отслеживания местоположения целевого объекта с использованием классификатора. Операции могут дополнительно включать в себя обеспечение пользователя указанием на качество локализации или осуществление связанного с лечением действия на основе качества локализации.
[0014] В дополнительном аспекте настоящее раскрытие включает в себя невременный машиночитаемый носитель, который хранит набор команд, который является исполняемым по меньшей мере одним процессором устройства, чтобы заставлять это устройство выполнить способ обучения классификатора для определения качества локализации целевого объекта по множеству изображений, полученных устройством визуализации во время лечения пациента лучевой терапией. Способ может включать в себя определение результата локализации, указывающего местоположение целевого объекта на множестве изображений, представляющих изображения, полученные в сеансе лечения лучевой терапией. Способ может также включать в себя определение показателя качества для каждого результата локализации. Способ может дополнительно включать в себя извлечение одного или более признаков из каждого результата локализации. Дополнительно, способ может включать в себя обучение классификатора с использованием результата локализации и одного или более из извлеченных признаков.
[0015] В дополнительном аспекте настоящее раскрытие включает в себя невременный машиночитаемый носитель, который хранит набор команд, который является исполняемым по меньшей мере одним процессором устройства, чтобы заставить это устройство выполнять способ определения качества локализации целевого объекта по множеству изображений, полученных устройством визуализации во время лечения пациента лучевой терапией. Способ может включать в себя определение результата локализации, указывающего местоположение целевого объекта на множестве изображений, полученных во время лечения пациента лучевой терапией. Способ может также включать в себя определение качества локализации у результата локализации для отслеживания местоположения целевого объекта с использованием классификатора. Способ может дополнительно включать в себя обеспечение пользователя указанием на качество локализации или осуществление связанного с лечением действия на основе качества локализации.
[0016] Дополнительные объекты и преимущества настоящего раскрытия будут изложены частично в нижеследующем подробном описании, и частично будут очевидны из описания, или могут быть изучены при применении на практике настоящего раскрытия. Объекты и преимущества настоящего раскрытия будут реализованы и достигнуты посредством элементов и комбинаций, конкретно указанных в прилагаемой формуле изобретения.
[0017] Следует понимать, что приведенное выше общее описание и нижеследующее подробное описание только иллюстрируют и объясняют, а не ограничивают заявленное изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0018] на чертежах, которые не обязательно приведены в масштабе, одинаковые ссылочные позиции могут описывать подобные компоненты в разных видах. Одинаковые ссылочные позиции, имеющие буквенные суффиксы или разные буквенные суффиксы, могут представлять разные примеры подобных компонентов. В общем чертежи иллюстрируют в качестве примера, но не ограничения, различные варианты осуществления, и вместе с описанием и формулой изобретения служат для объяснения раскрытых вариантов осуществления. Когда это целесообразно, одинаковые ссылочные позиции используются на всех чертежах для ссылки на одинаковые или подобные части. Такие варианты осуществления являются демонстративными и не предназначены для того, чтобы быть исчерпывающими или исключительными вариантами осуществления настоящих устройств, систем, или способов.
[0019] Фиг. 1 иллюстрирует примерную систему радиотерапии для локализации и отслеживания трехмерной целевого объекта для лучевой терапии.
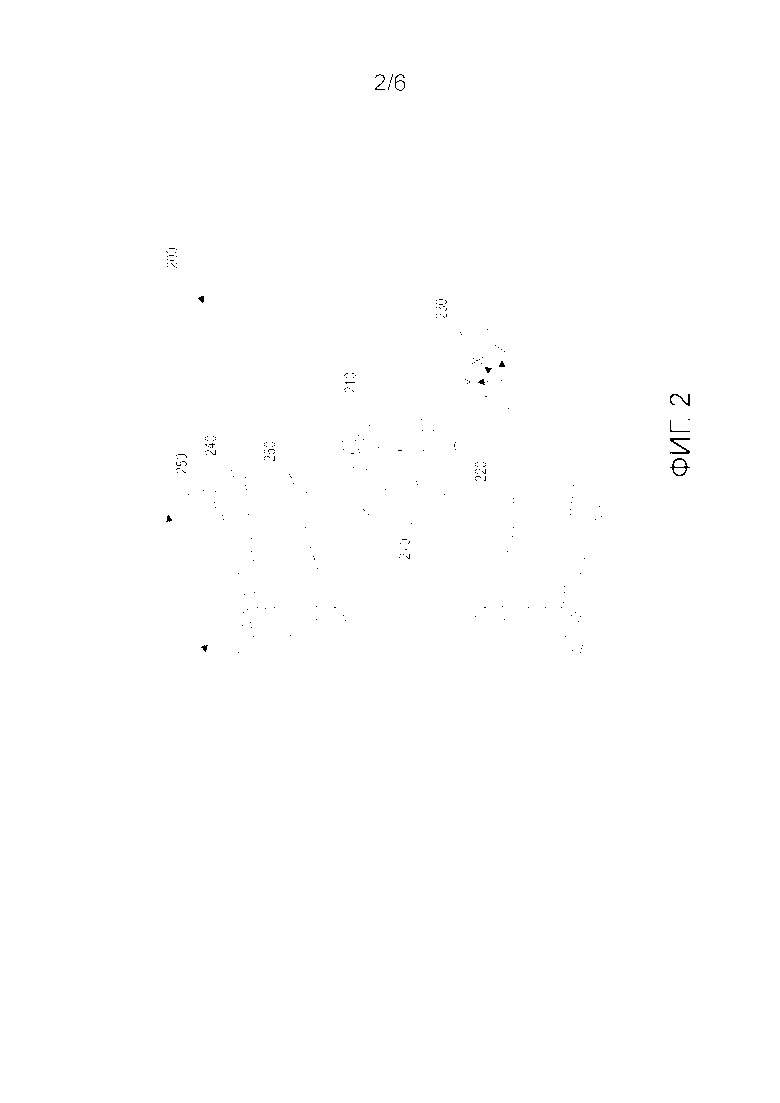
[0020] Фиг. 2 иллюстрирует примерное устройство радиотерапии, гамма-нож, который может быть использован в системе радиотерапии с Фиг. 1.
[0021] Фиг. 3 иллюстрирует примерное устройство радиотерапии, линейный ускоритель, который может быть использован в системе радиотерапии с Фиг. 1.
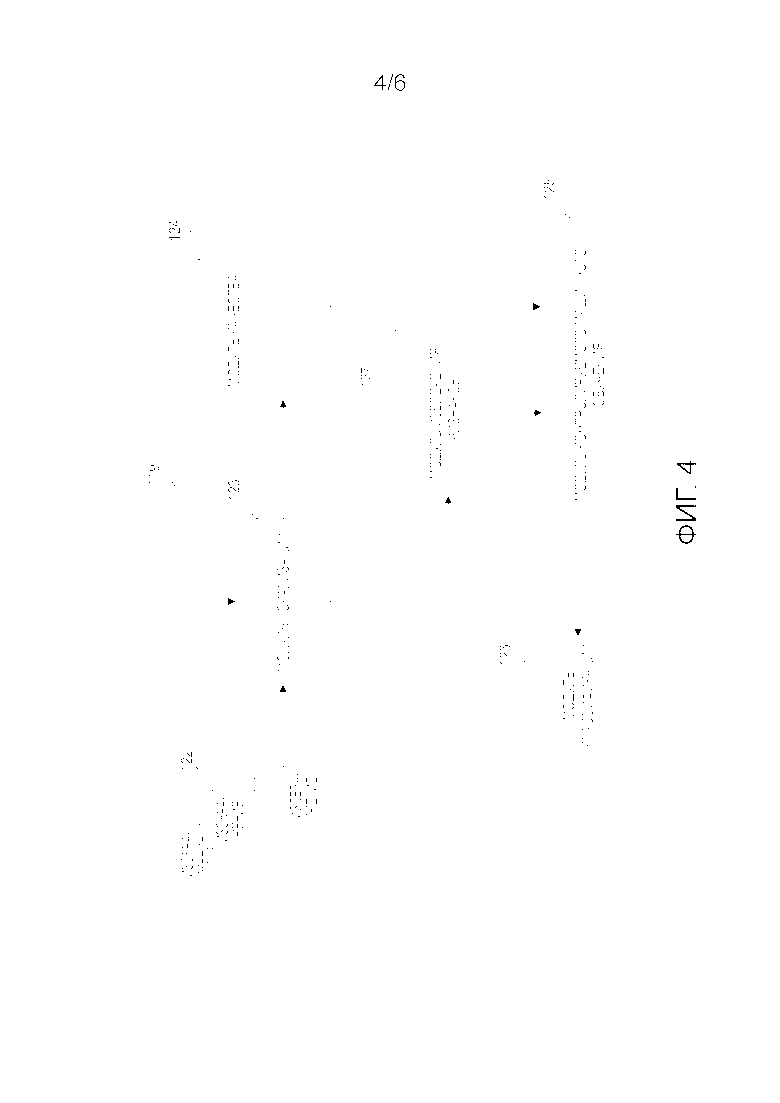
[0022] Фиг. 4 показывает блок-схему, иллюстрирующую обучение классификатора.
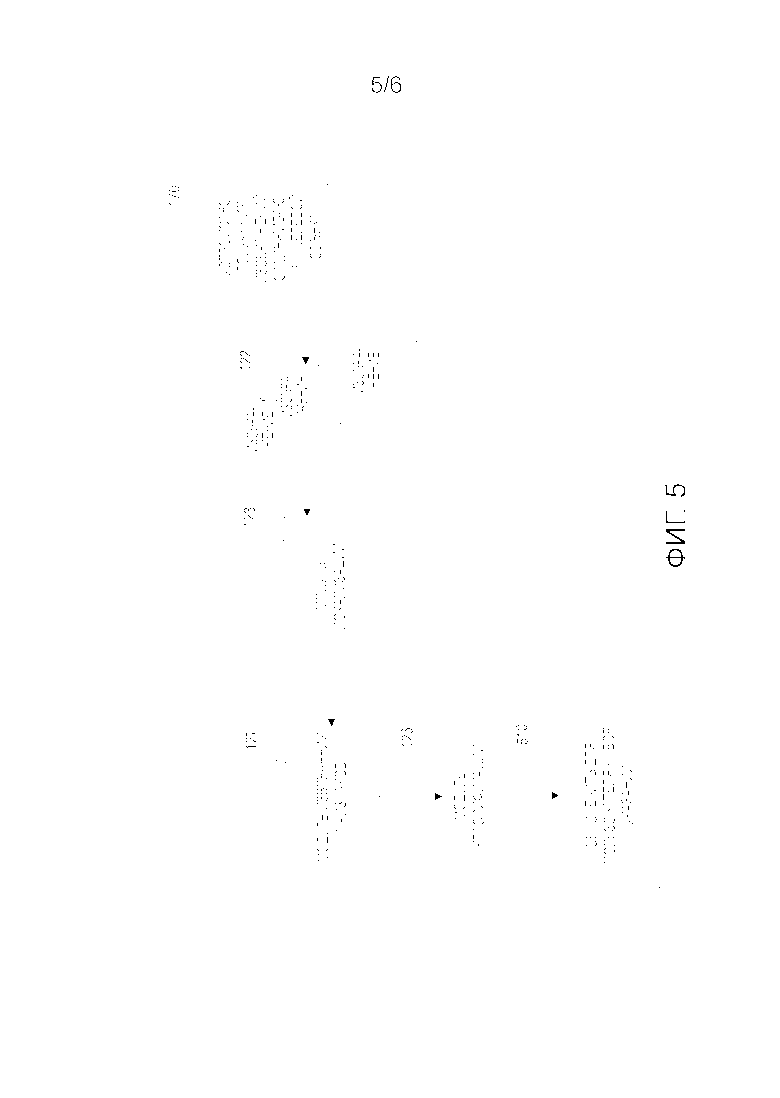
[0023] Фиг. 5 показывает блок-схему, иллюстрирующую использование классификатора с Фиг. 4 для отслеживания целевого объекта.
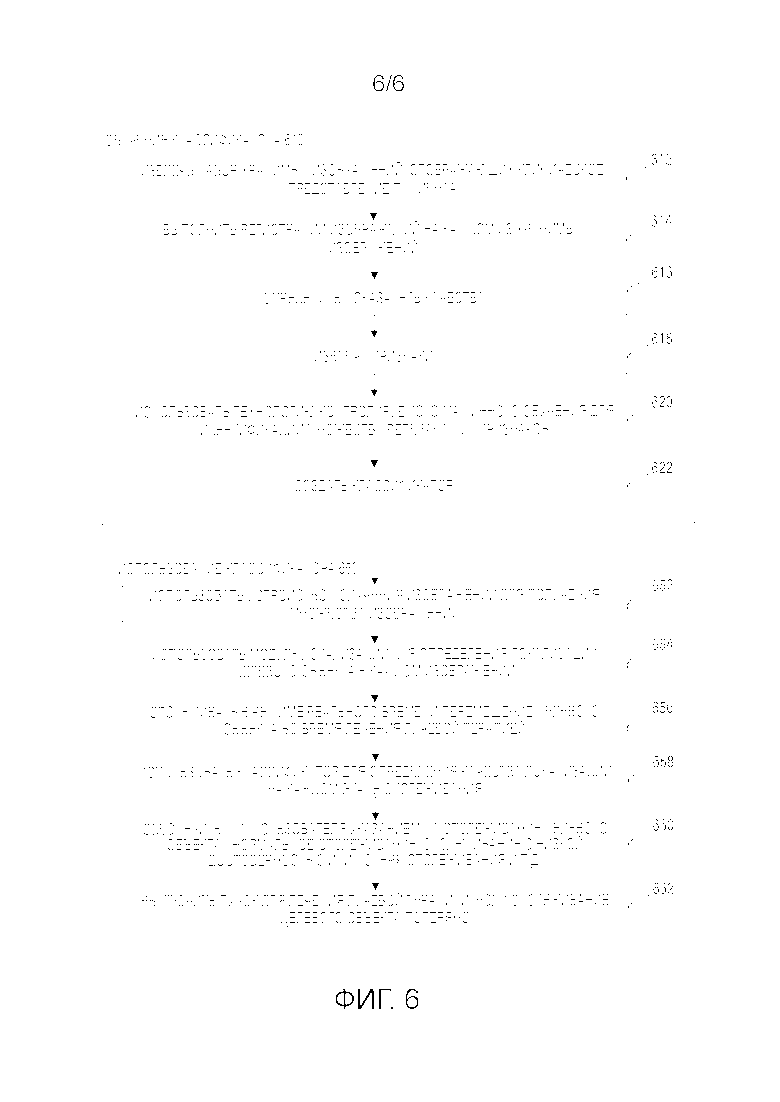
[0024] Фиг. 6 показывает блок-схему последовательности операций примерного способа для отслеживания перемещения целевого объекта во время лучевой терапии с использованием классификатора Фиг. 4.
ПОДРОБНОЕ ОПИСАНИЕ
[0025] Фиг. 1 иллюстрирует примерную систему 100 радиотерапии для создания плана лечения лучевой терапией или обновления существующего плана лечения лучевой терапией с использованием распределения дозы в качестве цели лечения, причем обновленный план лечения может быть использован для лечения пациента лучевой терапией. Система 100 радиотерапии может включать в себя устройство 110 лучевой терапии, соединенное с сетью 130, которая соединена с Интернетом 132. Сеть 130 может соединять устройство 110 лучевой терапии с базой 140 данных, базой 142 данных больницы, онкологической информационной системой (ОИС) 150 (например, которая может обеспечить информацию о пациенте), системой 160 планирования лечения (СПЛ) (например, для создания планов лечения лучевой терапией, подлежащих использованию устройством 110 радиотерапии), устройством 170 получения изображений, устройством 180 отображения и/или пользовательским интерфейсом 190.
[0026] Устройство 110 радиотерапии может включать в себя схему 112 процессора, устройство 116 памяти и коммуникационный интерфейс 114. Устройство 116 памяти может хранить исполняемые компьютером команды для операционной системы 118, планов 120 лечения и любые другие исполняемые компьютером команды, подлежащие исполнению схемой 112 процессора.
[0027] Схема 112 процессора может быть соединена с возможностью связи с устройством 116 памяти, и схема 112 процессора может быть выполнена с возможностью исполнения исполняемых компьютером команд, хранимых в устройстве 116 памяти. Например, схема 112 процессора может исполнять планы 120 лечения для реализации функциональностей использования модуля 123 локализации, модуля 124 качества, модуля 127 извлечения признаков и модуля 126 классификации. В некоторых вариантах осуществления необязательный модуль 125 контролируемого машинного обучения может быть также включен в память 116 для оперативного («на лету») выполнения операций обучения, например, для переобучения классификатора в клинике. На Фиг. 1, модуль 125 контролируемого машинного обучения показан пунктирными линиями для указания на то, что он является необязательным компонентом. Дополнительно, схема 112 процессора может захватывать множество изображений 122 из устройства 170 получения изображений и сохранять изображения 122 в устройстве 116 памяти. Дополнительно, схема 112 процессора может выполнять планы 120 лечения (например, такие как программное обеспечение Monaco®, выпускаемое компанией Elekta).
[0028] Схема 112 процессора может быть обрабатывающим устройством, может включать в себя одно или более обрабатывающих устройств общего назначения, таких как микропроцессор, центральный процессор (ЦП), графический процессор (ГП), ускоренный процессор (APU) и т.п. Более конкретно, схема 112 процессора может быть микропроцессором с полным набором команд (CISC-микропроцессором), микропроцессором с сокращенным набором команд (RISC-микропроцессором), микропроцессором с командными словами очень большой длины (VLIW-микропроцессором), процессором, реализующим другие наборы команд, или процессорами, реализующими комбинацию наборов команд. Схема 112 процессора может быть также одним или более обрабатывающими устройствами специального назначения, такими как специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (ППВМ), цифровой сигнальный процессор (ЦСП), система на кристалле (SoC) и т.п. Как будет понятно специалистам в данной области техники, в некоторых вариантах осуществления схема 112 процессора может быть процессором специального назначения, а не процессором общего назначения. Схема 112 процессора может включать в себя одно или более известных обрабатывающих устройств, таких как микропроцессор из семейств Pentium™, Core™, Xeon™, или Itanium®, выпускаемых компанией Intel™, семейств Turion™, Athlon™, Sempron™, Opteron™, FX™, Phenom™, выпускаемых компанией AMD™, или любые из различных процессоров, выпускаемых компанией Sun Microsystems. Схема 112 процессора может также включать в себя графические процессоры, такие как GPU из семейств GeForce®, Quadro®, Tesla®, выпускаемых компанией Nvidia™, GMA, семейства Iris™, выпускаемого компанией Intel™, или семейства Radeon™, выпускаемого компанией AMD™. Схема 112 процессора может также включать в себя ускоренные обрабатывающие блоки, такие как Desktop A-4 (6, 8) Series, выпускаемые компанией AMD™, семейство Xeon Phi™, выпускаемое компанией Intel™. Раскрытые варианты осуществления не ограничены никаким типом процессора (процессоров) или схем процессоров, которые, иначе говоря, выполнены с возможностью удовлетворять потребности в вычислениях для идентификации, анализа, сохранения, создания и/или обеспечения больших объемов данных визуализации или обработки таких данных визуализации для локализации и отслеживания целевого объекта или обработки любого другого типа данных, совместимого с раскрытыми вариантами осуществления. Дополнительно, термин «процессор» или схема процессора может включать в себя более одного процессора, например, многоядерную конструкцию или множество процессоров, каждый из которых имеет многоядерную конструкцию. Схема 112 процессора может выполнять последовательности команд компьютерной программы, хранимые в памяти 116, для выполнения различных операций, процессов, способов, которые будут объяснены более подробно ниже.
[0029] Устройство 116 памяти может хранить данные 122 изображений (например, трехмерные МРТ-данные, четырехмерные МРТ-данные, двумерные срезы и т.д.), принимаемые от устройства 170 получения изображений, или данные/информацию любого другого типа в любом формате, которые устройство 110 лучевой терапии может использовать для выполнения операций, совместимых с раскрытыми вариантами осуществления. Устройство 116 памяти может включать в себя постоянное запоминающее устройство (ROM), флэш-память, память с произвольным доступом (RAM), динамическую память с произвольным доступом (DRAM), такую как синхронная DRAM (SDRAM) или Rambus DRAM, статическую память (например, флэш-память, статическая память с произвольным доступом), и т.д., на которых исполняемые компьютером команды хранятся в любом формате. К исполняемым компьютером командам может иметь доступ схема 112 процессора, они могут быть считаны из ROM или любого другого подходящего местоположения памяти или загружены в RAM для исполнения схемой 112 процессора. Например, память 116 может хранить одно или более программных приложений. Программные приложения, хранимые в памяти 116, могут включать в себя, например, операционную систему 118 для распространенных компьютерных систем, а также для программно-управляемых устройств. Дополнительно, память 116 может хранить полное программное приложение или только часть программного приложения, которое может быть выполнено схемой 112 процессора. Например, устройство 116 памяти может хранить один или более планов 120 лечения лучевой терапией, создаваемых системой 160 планирования лечения. Дополнительно, устройство 116 памяти может хранить множество программных модулей. Например, программными модулями могут быть модуль 123 локализации, модуль 124 качества, модуль 127 извлечения признаков, необязательный модуль 125 контролируемого машинного обучения и модуль 126 классификации. Множество программных модулей может быть использовано СПЛ 160 вместе с планами 120 лечения для создания плана лечения лучевой терапией или обновления существующего плана лечения лучевой терапией.
[0030] В некоторых вариантах осуществления устройство 116 памяти может включать в себя машиночитаемый носитель данных. В то время как машиночитаемый носитель данных в одном варианте осуществления может быть единственным носителем, термин «машиночитаемый носитель данных» следует понимать как включающий в себя единственный носитель или множественные носители (например, централизованную или распределенную базу данных и/или соответствующие кэши и серверы), которые хранят один или более наборов исполняемых компьютером команд или данных. Термин «машиночитаемый носитель данных» также следует понимать как включающий в себя любой носитель, который способен хранить или кодировать набор команд для исполнения машиной, и которые заставляют машину исполнять любую одну или более из методологий настоящего раскрытия. Термин «машиночитаемый носитель данных» , таким образом, следует понимать как включающий в себя, но не ограниченный этим, твердотельную память, оптические и магнитные носители.
[0031] В одном варианте осуществления, устройство 116 памяти может быть выполнено с возможностью хранения по меньшей мере следующих типов данных: DICOM-данных, данных о дозе, параметров оптимизации, данных о положении зажима, данных об элементарных лучах, данных сегментов, форм сегментов, воксельных данных распределения дозы, исходных данных о дозе, и данных гистограммы доза-объем (ГДО), данных изображений.
[0032] Устройство 110 радиотерапии может обмениваться данными с сетью 130 через коммуникационный интерфейс 114, который соединен с возможностью связи со схемой 112 процессора и памятью 116. Устройство 110 лучевой терапии может включать в себя источник излучения (например, такой как устройство, которое обеспечивает гамма-лучи). Коммуникационный интерфейс 114 может включать в себя, например, сетевой адаптер, соединитель кабеля, последовательный соединитель, USB-соединитель, параллельный соединитель, адаптер высокоскоростной передачи данных (например, такой как волокно, USB 3.0, интерфейс thunderbolt, и т.п.), беспроводной сетевой адаптер (например, такой как WiFi-адаптер), телекоммуникационный адаптер (например, G, 4G/LTE и т.п.) и т.п. Коммуникационный интерфейс 114 может включать в себя одно или более цифровых или аналоговых коммуникационных устройств, которые позволяют устройству 110 радиотерапии обмениваться данными с другими машинами и устройствами, такими как удаленно расположенные компоненты, через сеть 130.
[0033] Сеть 130 может обеспечить функциональность локальной сети (LAN), беспроводной сети, среды облачных вычислений (например, программное обеспечение в качестве услуги, платформа в качестве услуги, инфраструктура в качестве услуги и т.д.), системы клиент-сервер, глобальной сети (WAN) и т.п. Таким образом, сеть 130 может обеспечить передачу данных между устройством 110 радиотерапии и некоторым количеством различных других систем и устройств, таких как, например: система 160 планирования лечения, онкологическая информационная система 150, и устройство 170 получения изображений. Дополнительно, данные, генерируемые системой 160 планирования лечения, ОИС 150, и устройством 170 получения изображений, могут быть сохранены в памяти 116, базе 140 данных или базе 142 данных больницы. Данные могут быть переданы/приняты через сеть 130 и/или коммуникационный интерфейс 114, чтобы они были доступными для схемы 112 процессора.
[0034] Дополнительно, сеть 130 может быть соединена с Интернетом 132 для обмена данными с серверами или клиентами, которые находятся на удалении и соединены с Интернетом. Как описано здесь, сеть 130 может включать в себя другие системы S1 (134), S2 (136), S3 (138). Системы S1, S2, и/или S3 могут быть идентичными системе 100 или могут быть другими системами. В некоторых вариантах осуществления одна или более систем, соединенных с сетью 130, могут образовывать распределенную среду вычислений/моделирования, которая совместно выполняет получение изображений, выполняет оптимизацию дозы, определяет распределение дозы, выполняет виртуальный сдвиг стола, выполняет оптимизацию «теплого» старта, ведет местоположение целевого объекта и проводит отслеживание целевого объекта, а также обеспечивает другие аспекты обеспечения радиотерапии для пациента.
[0035] Дополнительно, система 100 радиотерапии может обмениваться данными с базой 140 данных или базой 142 данных больницы для выполнения одной или более программ, хранящихся удаленно. В качестве примера, база 140 данных, база 142 данных больницы или они обе могут включать в себя реляционные базы данных, такие как базы данных компании Oracle™, базы данных компании Sybase™ или другие базы данных, и могут включать в себя нереляционные базы данных, такие как последовательные файлы Hadoop, HBase, Cassandra или другие. Такие удаленные программы могут включать в себя, например, программное обеспечение онкологической информационной системы (ОИС) или программное обеспечение планирования лечения. Программное обеспечение ОИС, например, может быть сохранено в базе 142 данных больницы, базе 140 данных, или ОИС 150. Программное обеспечение планирования лечения, например, может быть сохранено в базе 140 данных, базе 142 данных больницы, системе 160 планирования лечения или ОИС 150. Таким образом, например, устройство 110 радиотерапии может обмениваться данными с базой 142 данных больницы для реализации функциональностей онкологической информационной системы 150.
[0036] В некоторых вариантах осуществления база 140 данных и/или база 142 данных больницы может быть расположена удаленно от устройства 110 радиотерапии. База 140 данных и база 142 данных больницы могут включать в себя вычисляющие компоненты (например, систему управления базами данных, сервер баз данных, и т.д.), выполненные с возможностью приема и обработки запросов на данные, хранимые в устройствах памяти базы 140 данных или базы 142 данных больницы, и обеспечения данных из базы 140 данных или базы (баз) 142 данных больницы. Специалистам в данной области техники будет понятно, что базы 140, 142 данных могут включать в себя множество устройств, расположенных либо централизованным, либо распределенным образом.
[0037] Дополнительно, устройство 110 радиотерапии может обмениваться данными с базой 140 данных через сеть 130 для отправки/приема множества данных различных типов, хранимых в базе 140 данных. Например, в некоторых вариантах осуществления база 140 данных может быть выполнена с возможностью хранения множества изображений (например, трехмерных МРТ-изображений, четырехмерных МРТ-изображений, двумерных МРТ-изображений срезов, КТ-изображений, ультразвуковых изображений, двумерных рентгеноскопических изображений, рентгеновских изображений, необработанных данных из МР-сканограмм или КТ-сканограмм, данных стандарта цифрового изображения и коммуникаций в медицине (DICOM) и т.д.) от устройства 170 получения изображений. База 140 данных может хранить данные, подлежащие использованию модулем 123 локализации целевого объекта, модулем 124 обучения и планами 120 лечения. Устройство 110 лучевой терапии может принимать данные визуализации (например, трехмерные МРТ-изображения, четырехмерные МРТ-изображения, ультразвуковые изображения, и т.д.) из базы 140 данных.
[0038] Устройство 170 получения изображений может получать медицинские изображения (например, изображения магнитно-резонансной томографии (МРТ), трехмерные МРТ-изображения, двумерные потоковые МРТ-изображения, четырехмерные объемные МРТ-изображения, изображения компьютерной томографии (КТ), изображения конусно-лучевой КТ, изображения позитронно-эмиссионной томографии (ПЭТ), функциональные МРТ-изображения (например, fМРТ-изображения, DCE-МРТ-изображения и диффузионные МРТ-изображения), рентгеновские изображения, рентгеноскопические изображения, ультразвуковые изображения, портальные изображения лучевой терапии, изображения однофотонной эмиссионной компьютерной томографии (ОФЭКТ) и т.п.) пациента. Устройство 170 получения изображений может быть, например, устройством визуализации МРТ, устройством визуализации СТ, устройством визуализации ПЭТ, ультразвуковым устройством, рентгеноскопическим устройством, устройством визуализации ОФЭКТ или другим медицинским устройством визуализации для получения одного или более медицинских изображений пациента. Изображения, получаемые устройством 170 получения изображений, могут быть сохранены в базе 140 данных или в качестве данных визуализации и/или в качестве данных исследований. В качестве примера, изображения, получаемые устройством 170 получения изображений, могут быть также сохранены устройством 110 радиотерапии в памяти 116.
[0039] В одном варианте осуществления, например, устройство 170 получения изображений может быть интегрировано с устройством 110 радиотерапии в виде единственного устройства (например, МРТ-устройства, объединенного с линейным ускорителем, также называемого «МРТ-Linac», или в виде интегрированного МРТ-устройства, объединенного с гамма-ножом; трехмерного устройства визуализации, интегрированного с линейным ускорителем; конусно-лучевого КТ-устройства, интегрированного с линейным ускорителем, рельсового КТ-устройства, интегрированного с линейным ускорителем; рельсового МРТ-устройства, интегрированного с линейным ускорителем). Такой МРТ-Linac может быть использован, например, для определения местоположения целевого органа или целевой опухоли в пациенте, например, для управления лучевой терапией согласно плану лечения лучевой терапией для заданной целевого объекта.
[0040] Устройство 170 получения изображений может быть выполнено с возможностью получения одного или более изображений анатомии пациента для области исследования (например, целевого органа, целевой опухоли, или и для того, и для другого). Упомянутые одно или более изображений могут включать в себя множество двумерных срезов. Каждый двумерный срез может включать в себя один или более параметров (например, толщину двумерного среза, ориентацию, и местоположение и т.д.). Упомянутые один или более параметров могут быть настроены с использованием схемы 112 процессора так, чтобы они включали в себя целевой объект. Например, выбираемые признаки двумерного среза могут быть обработаны, например, посредством настройки градиента магнитного поля или характеристик радиочастотного (RF) сигнала. Например, положение среза может быть изменено посредством изменения частоты модуляции RF-импульса и поддержания той же самой величины градиента. Дополнительно, ориентация среза может быть изменена, например, с использованием физически отличной оси градиента (например, выбранный срез может быть ортогональным к прикладываемому градиенту). В одном примере устройство 170 получения изображений (например, МРТ-устройство или МРТ-Linac) может получать двумерный срез в любой ориентации. Например, ориентация двумерного среза может включать себя сагиттальную ориентацию, фронтальную ориентацию, аксиальную ориентацию или косую ориентацию. Дополнительно, эти ориентации, например, могут соответствовать градиенту магнитного поля (например, Gx, Gy, или Gz, соответственно), связанному с МРТ-устройством или МРТ-Linac. В одном примере, двумерные срезы могут быть определены на основании информации, такой как трехмерный МРТ-объем. Такие двумерные срезы могут быть получены устройством 170 получения изображений в «режиме реального времени», в то время как пациент проходит лечение лучевой терапией, например, с использованием устройства 110 лучевой терапии. В одном варианте осуществления двумерные срезы изображения могут быть обеспечены ультразвуковым устройством в качестве устройства 170 получения изображений.
[0041] Система 160 планирования лечения (например, MONACO®, выпускаемая компанией Elekta, XiO®, выпускаемая компанией Elekta) может создавать и хранить планы лечения лучевой терапией для конкретного пациента, подлежащего лечению, планы лечения лучевой терапией для других пациентов, а также другую радиотерапевтическую информацию (например, углы пучков, информацию гистограмм доза-объема, число пучков излучения, подлежащих использованию во время терапии, углы пучков, дозу, приходящуюся на каждый пучок и т.п.). Например, система 160 планирования лечения может обеспечить информацию о конкретной дозе ионизирующего излучения, подлежащей подаче на пациента, и другую связанную с радиотерапией информацию (например, тип терапии: например, лучевая терапия с визуальным контролем (IGRT), лучевая терапия с модулированной интенсивностью (IMRT), стереотаксическая лучевая терапия; и т.п.).
[0042] Одним типом плана лечения лучевой терапией является лучевая терапия с модулированной интенсивностью (IMRT). IMRT отличается от конформной лучевой терапии, которая обеспечивает однородное облучаемое поле излучения. IMRT позволяет модулировать распределения дозы, которые доставляются каждым пучком. В IMRT, каждый пучок излучения может быть дискретизирован посредством деления апертуры, через которую излучение доставляется, на малые прямоугольные области; таким образом, обеспечивается деление каждого пучка на множество «элементарных лучей». При использовании IMRT, интенсивности излучения (например, флюенс) для каждого элементарного луча могут модулироваться независимо. Для данного набора пучков флюенсы элементарных лучей могут влиять на качество плана лечения, которое определяется способностью лечения лучевой терапией подавать дозы назначенной величины на раковые целевые объекты и одновременно доставлять дозы меньшей величины к органам риска.
[0043] Вследствие непредсказуемой природы пучка излучения внутри пациента доза, принимаемая вокселом, может быть определена, например, посредством моделей по методу Монте-Карло. Основной целью планирования лечения IMRT является определение интенсивностей излучения для всех сегментов и/или апертур и/или контрольных точек и/или элементарных лучей, которое включает в себя положение лепестков MLC и интенсивность всех сегментов/апертур/контрольных точек в пучке. Хотя выше была описана IMRT, раскрытые способы, процессы, системы не ограничены IMRT, например, они могут быть применимыми к ротационной терапии с модуляцией объема излучения (VMAT), ротационной терапии с модуляцией интенсивности (IMAT), динамическому MLC, спиральной томотерапии, терапии со сканирующими пучками и т.п.
[0044] Например, VMAT доставляет излучение посредством поворота гантри устройства лучевой терапии (см. Фиг. 3) по одной или более дугам, причем пучок излучения постоянно включен. Во время VMAT-лечения некоторые параметры могут быть изменены, например, форма многолепесткового коллиматора (MLC), выходная плотность потока (например, мощность дозы), скорость поворота гантри, ориентация MLC, и IMRT (например, метод пошагового сканирования или метод скользящего окна). Обычно, каждая дуга может быть разделена на равномерно или неравномерно распределенные контрольные точки, причем каждая контрольная точка содержит один пучок. Каждый пучок может быть разделен на матрицу элементарных лучей (например, где каждый элементарный луч может иметь размер 3*10 мм2 или 3*5 мм2, в зависимости от размера MLC), и план лечения лучевой терапией может быть вычислен посредством рассмотрения распределения дозы с помощью дискретизации облучаемой области на некоторое число кубиков (например, вокселов). Таким образом, в одном варианте осуществления схема процессора выполняет процесс обновления существующего плана лечения лучевой терапией с использованием распределения дозы в качестве цели лечения. Существующий план лечения лучевой терапией содержит известное распределение дозы. Дополнительно, существующий план лечения лучевой терапией содержит исходный набор контрольных точек, причем исходный набор контрольных точек не соответствует известному распределению дозы. Процессор может оптимизировать контрольные точки для приближения к известному распределению дозы.
[0045] Создание плана лечения может включать в себя обмен данными с устройством 170 получения изображений (например, КТ-устройством, МРТ-устройством, ПЭТ-устройством, рентгеновским устройством, ультразвуковым устройством, и т.д.) для получения доступа к изображениям пациента и очерчивания целевого объекта, такой как опухоль. В некоторых вариантах осуществления может потребоваться очерчивание одного или более органов риска (ОР), например, здоровой ткани, окружающей опухоль или находящей с непосредственной близости к опухоли. Таким образом, сегментация ОР может быть выполнена, когда ОР находится вблизи целевой опухоли. Дополнительно, если целевая опухоль находится вблизи ОР (например, предстательная железа, находящаяся в непосредственной близости к мочевому пузырю и прямой кишке), то система 160 планирования лечения может позволить исследовать распределение дозы не только в целевом объекте, но и в ОР.
[0046] Для очерчивания целевого органа или целевой опухоли исходя из ОР устройством 170 получения изображений могут быть получены медицинские изображения, такие как МРТ-изображения, КТ-изображения, ПЭТ-изображения, fМРТ-изображения, рентгеновские изображения, ультразвуковые изображения, ОФЭКТ -изображения, набор трехмерных медицинских изображений и т.п. пациента, проходящего лечение лучевой терапией, для обнаружения внутренней структуры части тела. На основе информации из медицинских изображений, может быть получена трехмерная структура. Дополнительно, во время процесса планирования лечения, многие параметры могут быть учтены для достижения баланса между эффективным лечением целевой опухоли (например, лечением таким образом, чтобы целевая опухоль принимала достаточную дозу облучения для эффективной терапии) и слабым облучением ОР (или множественных ОР) (например, ОР (множественные ОР) принимает как можно более низкую дозу ионизирующего излучения), например, местоположение целевого органа и целевой опухоли, местоположение ОР, и перемещение целевого объекта относительно ОР. Например, трехмерная структура может быть получена посредством оконтуривания целевого объекта или оконтуривания ОР в пределах каждого двумерного слоя или среза МРТ или КТ-изображения и объединения контура каждого двумерного слоя или среза. Контур может быть создан вручную (например, врачом, дозиметристом, или медицинским работником) или автоматически (например, с использованием программы, такой как программное обеспечение Autosegmentation на основе Atlas, ABAS®, выпускаемое компанией Elekta, AB, Стокгольм, Швеция). В некоторых вариантах осуществления трехмерная структура целевой опухоли или ОР может быть создана автоматически системой 160 планирования лечения.
[0047] После определения местоположения и очерчивания целевой опухоли и ОР (множественных ОР) дозиметрист, врач или медицинский работник может определить дозу излучения, подлежащую подаче на целевая опухоль и любые ОР, близкие к опухоли (например, левую и правую околоушную железу, зрительные нервы, глаза, хрусталики глаз, внутреннее ухо, спинной мозг, ствол головного мозга, и т.п.). После определения дозы ионизирующего излучения для каждой анатомической структуры (например, целевой опухоли, ОР), может быть выполнен процесс, известный как обратное планирование, для определения одного или более параметров плана лечения. Результат обратного планирования может образовывать план лечения лучевой терапией, который может быть сохранен в системе 160 планирования лечения или базе 140 данных. В это время ожидаемая степень перемещения этих анатомических структур во время лечения может быть встроена в процесс планирования. Некоторые из этих параметров лечения могут быть коррелированными. Например, настройка одного параметра (например, весов для разных целей, например, увеличение дозы для целевой опухоли) в стремлении изменить план лечения может влиять по меньшей мере на один другой параметр, что в свою очередь, может привести к разработке другого плана лечения. Таким образом, система 160 планирования лечения может создавать специально разработанный план лечения лучевой терапией, имеющий эти параметры, для обеспечения устройством 110 радиотерапии лечения пациента лучевой терапией.
[0048] План лечения лучевой терапией может быть зависимым от степени перемещения, ожидаемого от анатомических структур. Если ожидается, что структуры будут перемещаться значительно во время лечения, то качество плана лечения может снизиться. Также, если структуры будут перемещаться больше во время лечения, чем это ожидалось, когда план разрабатывался, то это может снизить эффективность лечения. Таким образом, локализация одной или более из анатомических структур во время осуществления лечения может быть полезной для пациента.
[0049] Дополнительно, система 100 радиотерапии включает в себя устройство 180 отображения и пользовательский интерфейс 190. Устройство 180 отображения может включать в себя один или более экранов отображения, которые отображают медицинские изображения, интерфейсную информацию, параметры планирования лечения (например, контуры, распределения дозы, углы пучков, набор контрольных точек и т.д.), планы лечения, целевой объект, локализацию целевого объекта и/или отслеживание целевого объекта или любую связанную информацию для пользователя. Пользовательский интерфейс 190 может быть клавиатурой, клавишной панелью, сенсорным экраном или устройством любого типа, с помощью которого пользователь может ввести информацию в систему 100 радиотерапии.
[0050] Кроме того, любые и все компоненты системы 100 радиотерапии в одном варианте осуществления могут быть реализованы в виде виртуальной машины (например, VMWare, Hyper-V, и т.п.). Например, виртуальная машина может быть программным обеспечением, которое функционирует как аппаратное средство. Таким образом, виртуальная машина может включать в себя по меньшей мере один или более виртуальных процессоров, одно или более виртуальных устройств памяти, и один или более виртуальных коммуникационных интерфейсов, которые вместе функционируют как аппаратное средство. Например, ОИС 150, СПЛ 160, устройство 170 получения изображений могут быть реализованы в виде виртуальной машины. При условии доступности вычислительной мощности, памяти, и вычислительных возможностей, вся система радиотерапии может быть реализована в виде виртуальной машины.
[0051] Фиг. 2 показывает пример устройства 200 лечения лучевой терапией одного типа, например, гамма-ножа Leksell, выпускаемого компанией Elekta, AB, Стокгольм, Швеция. Гамма-нож может быть выполнен с возможностью использования устройства 112 процессора (показанного на Фиг. 1), которое может иметь удаленный доступ к МРТ-изображениям (например, из устройства 170 получения изображений), для локализации целевой опухоли мозга. В одном варианте осуществления МРТ-устройство, в качестве устройства 170 получения изображений, может быть интегрировано с гамма-ножом. Как показано на Фиг. 2, во время сеанса лечения лучевой терапией пациент 210 может надевать координатную раму 220 для поддержания устойчивости части тела пациента (например, головы), подвергаемой операции или радиотерапии. Координатная рама 220 и система 230 позиционирования пациента могут образовывать пространственную систему координат, которая может быть использована при формировании изображения пациента или во время операции с использованием излучения. Устройство 200 радиотерапии может включать в себя защитный корпус 240 для окружения множества источников 250 излучения. Источники 250 излучения могут создавать множество пучков излучения (например, элементарных лучей), проходящих через каналы 260 пучков. Упомянутое множество пучков излучения может быть предусмотрено с возможностью фокусирования на изоцентре 270 с разных направлений. В то время как каждый отдельный пучок излучения может иметь относительно низкую интенсивность, изоцентр 270 может принимать относительно высокий уровень излучения, когда множественные дозы от разных лучей излучения накапливаются в изоцентре 270. В некоторых вариантах осуществления изоцентр 270 может соответствовать целевому объекту, подлежащему оперированию или лечению, такому как опухоль.
[0052] Фиг. 3 показывает другой пример типа устройства 300 лечения лучевой терапией (например, линейный ускоритель, называемый LINAC, выпускаемый компанией Elekta, AB, Стокгольм, Швеция). При использовании линейного ускорителя 300 пациент 302 может быть расположен на столе 304 пациента для приема дозы ионизирующего излучения, определяемой планом лечения лучевой терапией, создаваемым системой 160 планирования лечения (показанной на Фиг. 1). Данные изображений 122 и модуль 123 локализации могут быть использованы для локализации и отслеживания трехмерного целевого объекта в объеме, например, целевого органа или целевой опухоли в пределах анатомии пациента 302.
[0053] Линейный ускоритель 300 может включать в себя головку 306 излучения, соединенную с гантри 308, который поворачивается вокруг пациента 302. Головка 306 излучения генерирует пучок 310 излучения, который направлен к целевому органуили целевой опухоли. Когда гантри 308 поворачивается, головка 306 излучения может поворачиваться вокруг пациента 302. При повороте головка 306 излучения может подать к пациенту 302 множество изменяющихся доз облучения в зависимости от угла и формы и размера опухоли, согласно плану лечения, создаваемому системой 160 планирования лечения (показанной на Фиг. 1). Поскольку органы и опухоли перемещаются внутри тела пациента, быстрая и точная трехмерная локализация целевого объекта является важной. Например, целевой орган или целевая опухоль может перемещаться вследствие различных типов перемещения (например, респираторного, сердечного, перистальтического или других типов перемещений пациента). Таким образом, линейный ускоритель 300 может быть выполнен с возможностью локализации целевого объекта (например, органа или опухоли) и отслеживания целевого объекта во время лечения лучевой терапией с использованием модуля 123 локализации целевого объекта.
[0054] Дополнительно, ниже стола 304 пациента может быть обеспечен плоскопанельный сцинтиллятор-детектор 312, который может поворачиваться синхронно с головкой 306 излучения вокруг изоцентра 314, расположенного на целевом органе или целевой опухоли на теле пациента 32. Плоскопанельный сцинтиллятор может получать изображения с наибольшим достижимым отношением сигнал-шум и может быть использован для верификации величины излучения, принимаемого пациентом 302 во время любого конкретного сеанса лечения лучевой терапией (например, лечение лучевой терапией может потребовать множественных сеансов лечения лучевой терапией, причем каждый сеанс обычно называется «фракцией»). Дополнительно, такие изображения используются для определения геометрической точности позиционирования пациента относительно головки 306 излучения.
[0055] Пересечение оси 316 и центра пучка 310, создаваемого головкой 306 излучения, обычно называется «изоцентром». Стол 304 пациента может быть моторизованным, так что пациент 302 может быть позиционирован так, чтобы место опухоли находилось в изоцентре 314 или вблизи него. Например, стол 304 пациента может изменять положения относительно одного или более других компонентов линейного ускорителя 300, например, для подъема, изменения продольного положения или поперечного положения пациента 302 относительно источника терапевтического излучения, расположенного в головке 306 излучения.
[0056] Как описано выше, существует потребность в способе и системе, которые могут быстро, эффективно и автоматически определять в режиме реального времени качество локализации целевого объекта на изображении, которые могут обеспечить информацию в отношении изменения позиционирования пациента и перемещения целевого объекта во время лечения лучевой терапией. Этот способ и система могут непрерывно подтверждать, что обнаруженные изменения достоверно известны. Фиг. 4 показывает блок-схему, иллюстрирующую создание и обучение классификатора с использованием контролируемого машинного обучения, в качестве одного варианта осуществления. Множество медицинских изображений 122 (например, КТ-изображений, МРТ-изображений, ультразвуковых изображений и т.п.) хранится в памяти 116. Изображения 122, например, могут быть трехмерными объемами, представляющими временные последовательности наблюдений предстательной железы. В другом варианте осуществления изображения 122 могут быть двумерными изображениями. Изображения 122 могут включать в себя изображения, полученные перед лечением лучевой терапией и/или во время лечения лучевой терапией. Данные обучения могут быть получены при условиях, которые не включают в себя реальное лечение, а только соответствуют ему. Когда целевой объект перемещается, дополнительные изображения 122 могут быть получены и сохранены в памяти 116.
[0057] После захвата и сохранения изображений 122 изображения 122 могут быть извлечены из памяти 116 процессором 112, и процессор может извлечь модуль 123 локализации, где выполняется регистрация изображений. В одном варианте осуществления локализация анатомии может быть выполнена модулем 123 локализации, который использует, например, жесткое преобразование с шестью параметрами (например, 3 поворота и 3 перемещения). Модуль 123 локализации может, например, регистрировать текущий объемный набор данных в соответствии с полученным первым объемным набором данных. В другом варианте осуществления модуль локализации может использовать сегментацию для идентификации целевого объекта в каждом изображении. В другом варианте осуществления модуль локализации может использовать технологию пространственного хэширования для идентификации местоположения на основании появления целевого объекта самого по себе. Процесс локализации обеспечивает отображение между по меньшей мере двумя изображениями для обеспечения указания на то, переместился ли целевой объект.
[0058] Процесс локализации сам по себе не определяет меру качества. Может потребоваться определить то, что будет обозначать качество в конкретном применении. Например, «хорошее качество» может быть определено как точность, лучшая, чем точность около 0,5 мм, «плохое качество» может быть определено как точность между точностью около 0,5 мм и точностью около 2 мм, а неспособность к локализации может быть определена как точность, худшая, чем точность около 2 мм. Наборы изображений, обеспечиваемые для исходного обучения, могут быть выбраны для обеспечения результатов «хорошего качества».
[0059] Для сбора множества результатов локализации всех разных типов качества, точность процесса локализации может быть изменена. Таким образом, модуль 124 качества соединен с модулем 123 локализации через контур 119 обратной связи. Например, в одном варианте осуществления процесс локализации может использовать алгоритм регистрации. Алгоритм регистрации может использовать исходное предположение того, каким является «правильный» результат локализации, для запуска алгоритма. Значения «исходного предположения» могут быть изменены. Например, «исходное предположение» может непрерывно настраиваться на основании идеального значения. Посредством изменения исходной точки запуска процесса локализации множество результатов локализации может быть получено и сохранено в памяти 116. Таким образом, аномальные условия могут быть созданы для алгоритма регистрации при отходе исходного предположения дальше от идеала. Настройка исходного предположения может продолжаться до тех пор, пока не появятся результаты плохого качества или неблагоприятные результаты. Посредством создания аномального условия, вызывающего неудачу алгоритма локализации, может быть создано множество случаев плохого качества или неудачных случаев для обучения модуля 125 машинного обучения. Результаты модуля 123 локализации являются входными данными как для модуля 124 качества, так и для модуля 127 извлечения признаков.
[0060] Модуль 127 извлечения признаков извлекает множество признаков из локализованных изображений. В одном варианте осуществления признаки могут включать в себя оценку корреляции, расстояние Кульбака-Лейблера между гистограммами, минимальную оценку корреляции и максимальную оценку корреляции отслеживаемого объекта, разделенного на октанты, оценки корреляции на расстоянии 1 мм от найденного положения, обратный композиционный коэффициент масштабирования гессианов или их комбинацию.
[0061] После определения модулем 124 качества меры качества для каждого из локализованных изображений и извлечения признаков модулем 127 извлечения признаков модуль 125 контролируемого машинного обучения может быть использован для обучения классификатора. Различные типы машинного обучения могут быть реализованы модулем 125 контролируемого машинного обучения, например, анализ дискриминантов Фишера, ядерная оценка плотности, метод случайного леса, машины опорных векторов и т.п. Модуль 125 контролируемого машинного обучения использует машинное обучение для создания множества подмножеств признаков, определения того, какое из подмножеств признаков является наилучшим подмножеством признаков (основных признаков), и использует это наилучшее подмножество признаков для обучения классификатора. Например, используемые признаки могут включать в себя одно или более из оценки корреляции, степени сходства (например, оценки корреляции), вычисляемой для заданного расстояния от найденной локализации, степеней сходства на подмножествах локализованной целевого объекта, композиционного коэффициента масштабирования гессианов, расстояния Кульбака-Лейблера между гистограммами, внутренних промежуточных сумм или других промежуточных вычислений степени сходства. В одном варианте осуществления, список основных признаков может быть использован для обучения классификатора. В одном варианте осуществления список основных признаков может включать в себя по меньшей мере четыре признака (например, оценка корреляции, окно с удалением на 1 мм, минимальная и максимальная оценка ортантов), которые могут быть использованы для обучения классификатора.
[0062] Выходными данными модуля 125 контролируемого машинного обучения является модуль 126 классификации (например, обученный классификатор), который хранится в памяти 116. Модуль 126 классификации может быть использован для предсказания качества локализации изображения для будущих локализаций изображения. Посредством предсказания качества локализаций изображения модуль 126 классификации может обеспечить оценку качества отслеживания целевого объекта. Например, оценку качества отслеживания целевого объекта в отношении того, находится ли отслеживание в пределах некоторой точности или в отношении того, было ли отслеживание потеряно.
[0063] Фиг. 5 показывает блок-схему, иллюстрирующую использование классификатора с Фиг. 4 для отслеживания целевого объекта. В одном варианте осуществления устройство 170 получения изображений (например, показанное на Фиг. 1) может быть использовано для получения множества изображений 122. Например, устройство 170 получения изображений может быть ультразвуковым устройством. Когда устройство 170 получения изображений получает изображения 122, поскольку оно отслеживает перемещение целевого объекта в режиме реального времени, срезы изображения объема целевого объекта получаются устройством 170 получения изображений для каждого шага отслеживания (например, около 0,5 мм). Алгоритм четырехмерного (4D) мониторинга (не показан) получает срезы изображения и собирает данные, постоянно повторяясь в режиме реального времени до тех пор, пока изображение 122 не будет готово для локализации. В одном варианте осуществления изображение 122 может быть единственным изображением. В другом варианте осуществления изображение 122 может быть множеством изображений. Процессор 112 извлекает модуль 123 локализации из памяти 116 и применяет изображения 122 к модулю 123 локализации. Модуль 123 локализации определяет результат локализации для каждого изображения 122. После локализации изображений 122 процессор 122 извлекает модуль 127 извлечения признаков и модуль 126 классификации из памяти 116. Модуль 127 извлечения признаков извлекает необходимые признаки из изображений и результата локализации, и модуль 126 классификации использует ранее обученный классификатор для обеспечения для пользователя указания качества отслеживания целевого объекта. Например, модуль 126 классификации указывает на то, имеет ли результат локализации нормальную достоверность, низкую достоверность, или на то, не было ли потеряно отслеживание. Выходные данные модуля 126 классификации обеспечивают для пользователя указание (510) на то, оставить ли пучок излучения включенным и продолжить облучение или выключить пучок излучения, поскольку отслеживание целевого объекта было потеряно. В другом варианте осуществления пучок излучения может быть автоматически выключен, когда модуль 126 классификации указывает на то, что целевой объект не отслеживается.
[0064] Преимущество использования классификатора состоит в том, что классификатор в одном варианте осуществления может быть обновлен или переобучен, когда он используется в клинической среде. Например, когда дополнительные данные будут получены из клинической среды, классификатор может быть оперативно переобучен на основе дополнительных данных. Обновленный или переобученный классификатор может улучшить результаты предсказания.
[0065] Фиг. 6 показывает блок-схему последовательности операций примерного способа для обучения классификатора и отслеживания перемещения целевого объекта во время лучевой терапии с использованием обученного классификатора. Блок-схема последовательности операций, показанная на Фиг. 6, включает в себя две части. Первая часть предназначена для обучения классификатора, которое может быть выполнено во время фазы развертывания продукта или во время любого конфигурирования или калибровки перед лечением. Как обсуждалось выше, классификатор может быть переобучен на основе дополнительных данных, когда он используется в клинической среде. Вторая часть предназначена для использования классификатора для вычисления качества локализации, которое может быть выполнено во время лечения. На основе качества локализации, для пользователя может быть обеспечено указание, для информирования пользователя о качестве локализации. Альтернативно или дополнительно, пучок излучения может автоматически логически управляться на основе качества локализации.
[0066] Как показано на Фиг. 6, первая часть 610 включает в себя этапы для обучения классификатора. Обучение классификатора может быть выполнено на любой стадии перед использованием классификатора, и процесс обучения не обязательно выполняется процессором 112 устройства 110 радиотерапии. В некоторых вариантах осуществления классификатор может быть переобучен в клинической среде на основе обновленных данных изображений, и процесс переобучения может быть выполнен процессором 112. В нижеследующем описании в качестве примера при описании этапов в процессе обучения будет сделана ссылка на процессор 112. Однако следует понимать, что процесс обучения может быть также выполнен любыми другими процессорами.
[0067] На этапе 612 устройство 112 процессора может извлечь набор хранимых изображений 122, отображающих клиническое представление пациента (например, ультразвуковые изображения, МР-изображения, и т.д.). На этапе 614 процессор 112 может выполнить функции, обеспечиваемые модулем 123 локализации, для выполнения регистраций изображений на каждом из хранимых изображений. На этапе 616 процессор 112 может определить показатель качества на основе результатов регистрации изображений и меры качества, обеспечиваемой модулем 124 качества. На этапе 618 процессор 112 может выполнить функции, обеспечиваемые модулем 127 извлечения признаков, для извлечения признаков из изображений, на основании которых определяют показатель качества. На этапе 620 процессор 112 может использовать технологию контролируемого машинного обучения, обеспечиваемую модулем 125 контролируемого машинного обучения, для идентификации множества релевантных признаков. На этапе 622 процессор 112 может создать классификатор с использованием модуля 126 классификации.
[0068] Вторая часть 650 включает в себя этапы для использования классификатора во время лечения для определения качества локализации. На этапе 652 множество изображений может быть получено устройством 170 получения изображений. На этапе 654 процессор 112 может использовать модуль 123 локализации для определения локализации целевого объекта (например, опухоли, органа, ОР, и т.д.) в каждом изображении. На этапе 656 процессор 112 может отслеживать в режиме реального времени перемещение целевого объекта во время лечения лучевой терапией. На этапе 658 процессор 112 может использовать классификатор, обученный в части 1 (610) для определения качества локализации на каждом этапе отслеживания. На этапе 660 процессор 112 может обеспечить указание пользователю устройства 110 радиотерапии, которое может указывать качество отслеживания целевого объекта. Качество может включать в себя меры качества, такие как нормальное качество, качество с низкой достоверностью, потеря отслеживания и т.д. На этапе 662 процессор 112 может контролировать подачу дозы облучения на основе качества, например, посредством логического управления пучком излучения, когда качество отслеживания не является нормальным, выключения пучка для лечения лучевой терапией, если отслеживание целевого объекта потеряно, и т.д.
[0069] Все публикации, патенты, и патентные документы, упомянутые в этом документе, полностью включены в этот документ по ссылке, как если бы они были отдельно включены в этот документ по ссылке. В случае противоречий в использованиях между этим документом и упомянутыми документами, включенными, таким образом, по ссылке, использование во включенной ссылке (ссылках) следует считать дополнительным по отношению к использованию в этом документе; в случае непримиримых противоречий, использование в этом документе имеет преимущество.
[0070] Примерные раскрытые варианты осуществления описывают системы и способы для отслеживания целевого объекта с использованием показателя качества во время лучевой терапии. Приведенное выше описание было представлено в целях иллюстрации. Оно не является исчерпывающим и не ограничивается точными формами раскрытых вариантов осуществления. Модификации и адаптации вариантов осуществления будут ясны из рассмотрения описания изобретения и применения на практике раскрытых вариантов осуществления.
[0071] В этом документе, термины «один» или «некоторый» используются, как принято в патентных документах, таким образом, как будто они включают в себя один или более чем один элемент, независимо от любых других примеров или использований выражений «по меньшей мере один» или «один или более». В этом документе термин «или» используется для ссылки на неисключительное «или», так что «А или В» включает в себя «А, но не В», «В, но не А», и «А и В», если не указано иное. В этом документе термины «включающий в себя» и «в котором» используются в качестве эквивалентов соответствующих терминов «содержащий» и «где». Также, в нижеследующей формуле изобретения термины «включающий в себя» и «содержащий» являются неограничивающими, а именно, аппарат, система, устройство, изделие, композиция, состав или способ, которые включают в себя элементы дополнительно к элементам, перечисленным после такого термина в пункте формулы изобретения, все же считаются попадающими в пределы объема этого пункта формулы изобретения. Кроме того, в нижеследующей формуле изобретения термины «первый», «второй» и «третий» и т.д., используются просто в качестве меток и не предназначены для наложения численных ограничений на их объекты.
[0072] Примеры способа, описанные здесь, могут быть по меньшей мере частично реализованы машиной или компьютером. Некоторые примеры могут включать в себя читаемый компьютером носитель или машиночитаемый носитель, кодированный с использованием команд, выполненных с возможностью конфигурировать электронное устройство для выполнения способов, описанных в вышеупомянутых примерах. Реализация таких способов может включать в себя программный код, такой как микрокод, код языка ассемблера, код языка высокого уровня и т.п. Различные программы и программные модули могут быть созданы с использованием множества технологии разработки программного обеспечения. Например, программные секции и программные модули могут быть разработаны на языках или посредством языков Java, Python, C, C++, ассемблера или любых других известных языков программирования. Одна или более таких программных секций или модулей могут быть интегрированы в компьютерную систему и/или машиночитаемые носители. Такой программный код может включать в себя машиночитаемые команды для выполнения различных способов. Программный код может формировать части компьютерных программных продуктов или модулей компьютерных программ. Дополнительно, в одном примере, программный код может быть реально сохранен на одном или более энергозависимых, непереходных или невременных материальных машиночитаемых носителях, например, во время выполнения или в другие моменты времени. Примеры таких материальных машиночитаемых носителей могут включать в себя, но не ограничены этим, жесткие диски, съемные магнитные диски, съемные оптические диски (например, компакт-диски или цифровые видеодиски), магнитные кассеты, карты памяти или флэш-карты, память с произвольным доступом (random access memory - RAM), постоянные запоминающие устройства (ROM), и т.п.
[0073] Кроме того, в то время как здесь были описаны примерные варианты осуществления, объем изобретения включает в себя любые и все варианты осуществления, имеющие эквивалентные элементы, модификации, опущения, комбинации (например, комбинации аспектов по всем различным вариантам осуществления), адаптации или изменения, основанные на настоящем раскрытии. Элементы в формуле изобретения должны интерпретироваться широко, на основе языка, используемого в формуле изобретения, и не ограничены примерами, описанными в описании настоящего изобретения или при рассмотрении применения, примеры которого следует толковать как неисключительные. Дополнительно, этапы раскрытых способов могут быть модифицированы любым образом, в том числе, посредством переупорядочения этапов или посредством вставки или удаления этапов. Таким образом, предполагается, что описание изобретения и примеры следует рассматривать только в качестве примера, причем истинный объем и сущность изобретения указаны нижеследующей формулой изобретения и полным объемом ее эквивалентов.
[0074] Приведенное выше описание, как предполагается, является иллюстративным и неограничивающим. Например, описанные выше примеры (или один или более их аспектов) могут быть использованы в комбинации друг с другом. Могут быть использованы другие варианты осуществления, например, варианты осуществления специалиста в данной области техники, пересмотревшего вышеупомянутое описание. Также, в вышеупомянутом Подробном описании, различные признаки могут быть сгруппированы вместе для упорядочивания раскрытия. Это не следует интерпретировать таким образом, как будто предполагается, что незаявленный раскрытый признак является существенным для любого пункта формулы изобретения. Напротив, объект изобретения может заключаться меньше, чем во всех признаках конкретного раскрытого варианта осуществления. Таким образом, нижеследующая формула изобретения, соответственно, встроена в Подробное описание в виде примеров или вариантов осуществления, причем каждый пункт формулы изобретения является самостоятельным как отдельный вариант осуществления, и предполагается, что такие варианты осуществления могут быть объединены друг с другом в различных комбинациях или перестановках. Объем настоящего изобретения следует определять со ссылкой на прилагаемую формулу изобретения и на полный объем эквивалентов, на которые такая формула изобретения имеет право.


Группа изобретений относится к лучевой терапии или радиотерапии, а именно к системам и способам определения отслеживания целевого органа во время лучевой терапии. Способ обучения классификатора для определения качества локализации целевого объекта по множеству изображений, полученных устройством визуализации во время лечения пациента лучевой терапией, содержит определение результата локализации, указывающего местоположение целевого объекта на множестве изображений, представляющих изображения, полученные в сеансе лечения лучевой терапией, определение показателя качества для каждого результата локализации, причем показатель качества представляет уровень точности каждого результата локализации, извлечение посредством обрабатывающей схемы одного или более признаков из каждого результата локализации и обучение классификатора с использованием результата локализации, показателя качества и одного или более из извлеченных признаков, причем классификатор выводит указание уровня точности нового результата локализации вновь захваченного изображения. Система для обучения классификатора для определения качества локализации целевого объекта по множеству изображений, полученных устройством визуализации во время лечения пациента лучевой терапией, содержит память для хранения исполняемых компьютером команд и процессор, соединенный с возможностью связи с памятью, причем исполняемые компьютером команды, будучи исполняемыми процессором, заставляют процессор выполнять способ. Невременный машиночитаемый носитель хранит набор команд, который является исполняемым процессором устройства, чтобы заставить это устройство выполнять способ. Использование группы изобретений позволяет быстро и эффективно определять в режиме реального времени качество локализации целевого объекта в изображении. 3 н. и 17 з.п. ф-лы, 6 ил.
1. Способ обучения классификатора для определения качества локализации целевого объекта по множеству изображений, полученных устройством визуализации во время лечения пациента лучевой терапией, содержащий:
определение результата локализации, указывающего местоположение целевого объекта на множестве изображений, представляющих изображения, полученные в сеансе лечения лучевой терапией;
определение показателя качества для каждого результата локализации, причем показатель качества представляет уровень точности каждого результата локализации;
извлечение посредством обрабатывающей схемы одного или более признаков из каждого результата локализации; и
обучение классификатора с использованием результата локализации, показателя качества и одного или более из извлеченных признаков, причем классификатор выводит указание уровня точности нового результата локализации вновь захваченного изображения.
2. Способ по п. 1, дополнительно содержащий:
выбор подмножества изображений из упомянутого множества изображений для обеспечения меры качества; и
обеспечение образцов, имеющих типы качеств, посредством настройки результата локализации.
3. Способ по п. 1, причем обучение классификатора содержит:
обучение классификатора с использованием технологии контролируемого машинного обучения, включающее в себя:
создание множества подмножеств признаков;
определение основных признаков на основе упомянутого множества подмножеств признаков; и
обучение классификатора с использованием основных признаков.
4. Способ по п. 3, причем основные признаки включают в себя по меньшей мере одно из:
оценки корреляции;
степени сходства, вычисляемой для заданного расстояния от местоположения целевого объекта;
минимальной оценки ортантов; или
максимальной оценки ортантов.
5. Способ по п. 1, причем устройство визуализации включает в себя ультразвуковой датчик, и упомянутое множество изображений включает в себя ультразвуковые изображения.
6. Способ по п. 1, причем устройство визуализации включает в себя МРТ-устройство, а упомянутое множество изображений включает в себя МР-изображения.
7. Способ определения качества локализации целевого объекта по множеству изображений, полученных устройством визуализации во время лечения пациента лучевой терапией, содержащий:
определение результата локализации, указывающего местоположение целевого объекта на множестве изображений, полученных во время лечения пациента лучевой терапией;
определение качества локализации у результата локализации для отслеживания местоположения целевого объекта с использованием обученного классификатора по любому из пп. 1-6, причем качество локализации представляет уровень точности каждого результата локализации; и
обеспечение пользователя указанием на качество локализации или осуществление связанного с лечением действия на основе качества локализации.
8. Способ по п. 7, причем указание на качество локализации отражает определение по меньшей мере нормального отслеживания, отслеживания с низкой достоверностью и потери отслеживания.
9. Способ по п. 7, дополнительно содержащий:
извлечение посредством обрабатывающей схемы одного или более признаков из упомянутого множества изображений и результата локализации; и
определение качества локализации с использованием обученного классификатора на основе извлеченных одного или более признаков.
10. Способ по п. 7, дополнительно содержащий:
отслеживание в режиме реального времени перемещения целевого объекта во время лечения лучевой терапией на основе результата локализации и качества локализации.
11. Способ по п. 7, причем связанное с лечением действие включает в себя выключение пучка излучения, когда качество локализации указывает на потерю отслеживания целевого объекта.
12. Способ по п. 7, дополнительно содержащий:
обновление или переобучение классификатора в клинической среде на основе новых данных.
13. Система для обучения классификатора для определения качества локализации целевого объекта по множеству изображений, полученных устройством визуализации во время лечения пациента лучевой терапией, содержащая:
память для хранения исполняемых компьютером команд; и
процессор, соединенный с возможностью связи с памятью, причем исполняемые компьютером команды, будучи исполняемыми процессором, заставляют процессор выполнять операции, включающие в себя:
определение результата локализации, указывающего местоположение целевого объекта на множестве изображений, представляющих изображения, полученные в сеансе лечения лучевой терапией;
определение показателя качества для каждого результата локализации, причем показатель качества представляет уровень точности каждого результата локализации;
извлечение одного или более признаков из каждого результата локализации; и
обучение классификатора с использованием результата локализации, показателя качества и одного или более из извлеченных признаков, причем классификатор выводит указание уровня точности нового результата локализации вновь захваченного изображения.
14. Система для определения качества локализации целевого объекта по множеству изображений, полученных устройством визуализации во время лечения пациента лучевой терапией, содержащая:
память для хранения исполняемых компьютером команд; и
процессор, соединенный с возможностью связи с памятью, причем исполняемые компьютером команды, будучи исполняемыми процессором, заставляют процессор выполнять операции, включающие в себя:
определение результата локализации, указывающего местоположение целевого объекта на множестве изображений, полученных во время лечения пациента лучевой терапией;
определение качества локализации у результата локализации для отслеживания местоположения целевого объекта с использованием обученного классификатора по п. 13, причем качество локализации представляет уровень точности каждого результата локализации; и
обеспечение пользователя указанием на качество локализации или осуществление связанного с лечением действия на основе качества локализации.
15. Система по п. 14, причем указание на качество локализации отражает определение по меньшей мере нормального отслеживания, отслеживания с низкой достоверностью и потери отслеживания.
16. Система по п. 14, причем операции дополнительно содержат:
извлечение одного или более признаков из упомянутого множества изображений и результата локализации; и
определение качества локализации с использованием обученного классификатора на основе извлеченных одного или более признаков.
17. Невременный машиночитаемый носитель, который хранит набор команд, который является исполняемым по меньшей мере одним процессором устройства, чтобы заставить это устройство выполнять способ обучения классификатора для определения качества локализации целевого объекта по множеству изображений, полученных устройством визуализации во время лечения пациента лучевой терапией, причем способ содержит:
определение результата локализации, указывающего местоположение целевого объекта на множестве изображений, представляющих изображения, полученные в сеансе лечения лучевой терапией;
определение показателя качества для каждого результата локализации, причем показатель качества представляет уровень точности каждого результата локализации;
извлечение посредством упомянутого по меньшей мере одного процессора одного или более признаков из каждого результата локализации; и
обучение классификатора с использованием результата локализации, показателя качества и одного или более из извлеченных признаков, причем классификатор выводит указание уровня точности нового результата локализации вновь захваченного изображения.
18. Невременный машиночитаемый носитель, который хранит набор команд, который является исполняемым по меньшей мере одним процессором устройства, чтобы заставлять это устройство выполнять способ определения качества локализации целевого объекта по множеству изображений, полученных устройством визуализации во время лечения пациента лучевой терапией, причем способ содержит:
определение результата локализации, указывающего местоположение целевого объекта на множестве изображений, полученных во время лечения пациента лучевой терапией;
определение качества локализации у результата локализации для отслеживания местоположения целевого объекта с использованием обученного классификатора по п. 17, причем качество локализации представляет уровень точности каждого результата локализации; и
обеспечение пользователя указанием на качество локализации или осуществление связанного с лечением действия на основе качества локализации.
19. Невременный машиночитаемый носитель по п. 18, причем указание на качество локализации отражает определение по меньшей мере нормального отслеживания, отслеживания с низкой достоверностью и потери отслеживания.
20. Невременный машиночитаемый носитель по п. 18, причем способ дополнительно содержит:
извлечение посредством упомянутого по меньшей мере одного процессора одного или более признаков из упомянутого множества изображений и результата локализации; и
определение качества локализации с использованием обученного классификатора на основе извлеченных одного или более признаков.
| US2013030283 A1, 31.01.2013 | |||
| CN101540048 A, 23.09.2009 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ЛИЦ НА ИЗОБРАЖЕНИИ С ПРИМЕНЕНИЕМ КАСКАДА КЛАССИФИКАТОРОВ | 2010 |
|
RU2427911C1 |

