УРОВЕНЬ ТЕХНИКИ
Конструирование и разработка электронных устройств устойчиво придерживается тенденции уменьшения размеров с тех пор как Гордон Мур - сооснователь корпорации Intel® - в 1965 году предположил, что плотность расположения транзисторов (и, следовательно, вычислительная мощность) на заданной площади чипа будет увеличиваться приблизительно в 2 раза каждые 24 месяца; это в некоторой степени пророческое утверждение получило широкую известность под названием "закон Мура". Медицинские устройства и аппараты также не являются исключением в отношении тенденции к минимизации электроники. Микроэлектронные устройства часто применяют в качестве датчиков, обеспечивающих обратную связь о состоянии пациента при диагностических процедурах; так, их применяют для оценки пульса, насыщения крови кислородом, температуры тела, а также показателей жизнедеятельности плода в процессе родов.
Во время хирургических вмешательств датчики обычно применяют для оценки перемещения жидкостей между телом пациента и медицинской аппаратурой. Обычно во время хирургических операций осуществляется обмен различными жидкостями, например кровью, физиологическим раствором и лекарственными препаратами, с различными целями, такими как компенсация потери жидкости, орошение операционного поля и автоматическое введение лекарственных средств. Электронные устройства для оценки параметров жидкостей часто применяют для таких целей, как, например, измерение кровяного давления, потока и температуры.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Способ и аппарат для динамического сбора данных основаны на использовании микроэлектромеханических систем (MEMS) и наноэлектромеханических (NEMS) хирургических датчиков для сбора и регистрации хирургических параметров тока жидкости и других характеристик операционного поля. Медицинское устройство использует или фиксирует хирургический датчик на или над путем тока жидкости, перемещаемой во время хирургической процедуры. При хирургической процедуре используется медицинское устройство в операционном поле, ответственное за ток жидкости, например канюля или другой эндоскопический инструмент, устанавливаемые в хирургическую полость, определяемую или используемую в целях хирургической процедуры. Миниатюрный размер хирургического датчика позволяет осуществлять неинтрузивное размещение датчика в операционном поле, так что датчик не препятствует и никаким другим образом отрицательно не влияет на ток жидкости, параметры которой он измеряет. Кроме того, миниатюрный размер позволяет снизить расходы на изготовление и утилизацию инструментов для одноразового применения, которые подлежат утилизации после использования при манипуляциях с одним пациентом. Такие хирургические параметры, как: давление, поток и температура подлежат измерению непосредственно в операционном поле, а не опосредованно через отдаленные источники жидкости, что позволяет получить более точные показания хирургических параметров в динамических условиях, что невозможно в случае использования традиционных устройств, работающих по принципу радиочастотной идентификации (RFID).
Обычно в хирургических условиях обмен различными жидкостями происходит на протяжении всей хирургической процедуры (операции). К таким жидкостям относится кровь, физиологический раствор, лекарственные препараты, промывные воды, анестезирующий газ, кислород и прочее. Наблюдение и регистрация хирургических параметров, связанных с различными жидкостями, обеспечивает наличие диагностической обратной связи для хирургов и медицинского персонала. Во время эндоскопической хирургической процедуры система управления жидкостями обычно обеспечивает, например, подачу физиологического раствора во внутренние части операционного поля для орошения и расширения операционного поля.
В раскрытых ниже конфигурациях система управления хирургическими жидкостями использует датчики, работающие на основе MEMS или NEMS (микроэлектромеханические или наноэлектромеханические системы), для предоставления данных измерений и статистики процессору системы управления хирургическими жидкостями в ходе хирургической процедуры, для использования информации от датчиков в логических инструкциях, соответствующих датчикам. Еще одним преимуществом является то, что такие датчики являются одноразовыми и малыми по размеру, что обеспечивает их свободное размещение (без обтураций) и снижает расходы и массу отработавшего одноразового хирургического оборудования. Данные о хирургических жидкостях обычно являются динамическими и, следовательно, поддаются регулярному мониторингу и реагированию. Например, ценными, но часто недостаточно востребованными данными являются точные данные о внутрисуставной жидкости, которые можно использовать во время операции. Конфигурации предложенного подхода позволяют использовать эти данные путем размещения MEMS-датчика внутри сустава путем прикрепления датчика к другому хирургическому инструменту, либо в качестве самостоятельного устройства.
Представленные здесь конфигурации основаны, отчасти, на том наблюдении, что при традиционных подходах используются RFID-метки (метки для радиочастотной идентификации), прикрепляемые к хирургическим инструментам и оборудованию для отслеживания их характеристик во время хирургической процедуры. Несмотря на то, что RFID-метки могут быть изготовлены с малыми размерами и пассивными свойствами (т.е. их питание и сигнальное управление осуществляется извне), их вычислительная мощность и производительность ограничены. К сожалению, вследствие этого традиционные подходы к обеспечению связи между устройствами страдают от несовершенства, связанного с тем, что обратная связь обычно ограничена идентификацией устройства или инструмента, к которому прикреплена RFID-метка, тогда как другая информация, отличная от идентификационной, остается недоступной по причине ограниченной вычислительной мощности, которая может быть закодирована в RFID-метке.
Соответственно, представленные здесь конфигурации лишены описанных недостатков за счет применения бесконтактного регистрирующего устройства, размещаемого в операционном поле, для непосредственного измерения хирургических параметров, а также передачи регистрируемых данных в систему управления хирургическими жидкостями. В отличие от традиционных подходов, при которых применяются неинвазивные (внешние) датчики или передатчики, встроенные в систему управления хирургическими жидкостями, представленный подход основан на использовании датчиков, размещаемых в операционном поле. Непосредственное, инвазивное измерение параметров, обеспечиваемое при предложенном подходе, позволяет получать точные показания датчиков при измерении давления, потока и других параметров, что позволяет получить более точные данные, чем, например, при опосредованных измерениях с использованием передатчиков, измеряющих параметры трубок, присоединенных к системе управления хирургическими жидкостями. Использование MEMS- и NEMS-устройств позволяет размещать устройства непосредственно в операционном поле, например в коленном суставе между суставными поверхностями костей, а беспроводной интерфейс позволяет передавать информацию о жидкости без помех в отношении других инструментов или аспектов хирургической процедуры.
Данный способ буквально обеспечивает динамическую хирургическую обратную связь во время хирургической или терапевтической процедуры благодаря программированию интегрированного микромеханического устройства, например MEMS-устройства с соответствующей мощностью, способностями регистрации и передачи данных, а также использование интегрированного микромеханического устройства в месте тока жидкости, перемещаемой в результате терапевтической процедуры. Внешняя контрольная или диагностическая система, например система управления хирургическими жидкостями, активирует интегрированное микромеханическое устройство с помощью беспроводного сигнала для передачи обратного сигнала с информацией об измеренных хирургических параметрах, контрольная система при этом получает обратный сигнал для определения измеренных хирургических параметров.
В конкретной конфигурации заявленный подход имеет определенную область применения, а именно эндоскопическую процедуру, такую как операция на коленном суставе, обсуждаемую здесь как пример применения. В среде медицинского оборудования способ измерения хирургических параметров включает определение хирургической полости, восприимчивой к поступлению жидкости, необходимой для целей терапевтической процедуры; таким образом, полость находится во взаимосвязи с эндоскопическим инструментом для выполнения терапевтической процедуры. В предоставленном примере хирургической полостью является область скелетного сустава между суставными поверхностями (большеберцовая и бедренная кость). Интегрированное микромеханическое устройство (микромеханическое устройство) запрограммировано на определенную мощность, способность регистрации и передачи данных, позволяющих использовать данное микромеханическое устройство для неинтрузивного прикрепления к эндоскопическому инструменту. Хирург вводит микромеханическое устройство в хирургическую полость посредством эндоскопического инструмента и направляет ток жидкости на хирургическую полость для поддержки положительного давления и эвакуации хирургического материала, образующегося в результате терапевтической процедуры. Хирургические инструменты используют микромеханическое устройство на пути тока жидкости при терапевтической процедуре посредством эндоскопического инструмента. Система управления хирургическими жидкостями активирует микромеханическое устройство для измерения хирургических параметров, обычно включающих по меньшей мере одно из следующих: давление, скорость потока и температуру жидкости, текущей в хирургической полости; затем система управления или контроллер принимает измеренные хирургические параметры с помощью беспроводной передачи данных от микромеханического устройства.
Альтернативные конфигурации заявленного изобретения включают многозадачное или многопроцессорное компьютеризированное устройство, например мультипроцессор, контроллер или отдельное компьютерное устройство, или нечто подобное с возможностью работы под управлением программного обеспечения и/или электронной схемы (например, описанного выше процессора) для обработки любого или всех из раскрытых здесь операций в рамках способа в качестве вариантов воплощения заявленного изобретения. Другие варианты воплощения заявленного изобретения включают программное обеспечение, такое как Java Virtual Machine и/или операционную систему, которая может работать самостоятельно или в совокупности с любым другим многопроцессорным компьютеризированным устройством для осуществления этапов и операций согласно воплощению способа, обобщенных выше и подробно раскрытых ниже. Один из таких вариантов воплощения включает компьютерный программный продукт, который содержит несъемный машиночитаемый носитель данных, включающий компьютерную программную логику, программируемую как инструкции на ней, которая при выполнении в многопроцессорном компьютеризированном устройстве, соединенном с памятью и процессором, программирует процессор для выполнения операций, раскрытых здесь в качестве вариантов воплощения заявленного изобретения для выполнения запросов доступа к данным. Такая схема организации изобретения обычно представлена в виде программного обеспечения, кода и/или других данных (например, структур данных), организованных или запрограммированных на машиночитаемом носителе, таком как оптический носитель (например, CD-ROM), гибкий или жесткий диск, либо другие виды носителей информации, такие как микропрограммное обеспечение или набор микрокоманд в одном или более ROM, RAM или PROM чипов, вентильных матриц с эксплуатационным программированием (FPGA) или специализированной интегральной микросхеме (ASIC). Программное обеспечение или микропрограммное обеспечение или другие подобные конфигурации могут быть установлены на компьютеризированное устройство (например, во время работы операционной системы или при установке оборудования) для обеспечения выполнения компьютеризированным устройством процедур, описанных здесь в качестве вариантов воплощения заявленного изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Представленные выше и другие объекты, свойства и преимущества заявленного изобретения будут очевидны из последующего описания конкретных вариантов воплощения заявленного изобретения, согласно иллюстрациям в прилагаемых чертежах, в которых одинаковые указатели соответствуют аналогичным частям в различных представлениях. Масштаб чертежей не обязательно имеет строгое соответствие, поскольку чертежи призваны проиллюстрировать только принципы изобретения.
На фиг. 1 приведена контекстная схема среды медицинского устройства, пригодная для применения с раскрытыми здесь конфигурациями;
На фиг. 2 приведена блок-схема динамического считывания параметров согласно раскрытому здесь описанию;
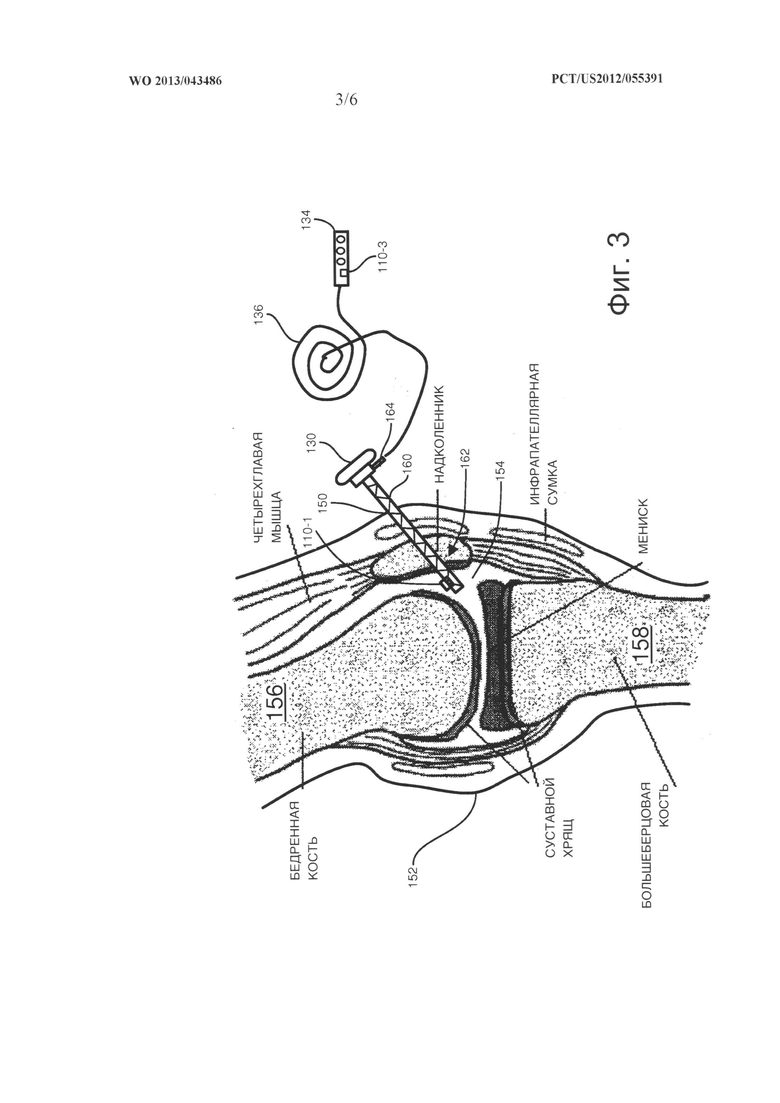
На фиг. 3 приведена схема размещения датчика в среде по фиг.1; и
На фиг. 4-6 приведена блок-схема для организации размещения датчиков при эндоскопической хирургической процедуре.
ПОДРОБНОЕ ОПИСАНИЕ
Представленное ниже описание является примерной конфигурацией среды медицинского устройства, обеспечивающего динамическую оценку параметров хирургической жидкости в соответствии с раскрытием в данном документе. В конкретных условиях предлагаемый подход может включать использование датчика на канюле или другом хирургическом инструменте для сбора данных в режиме реального времени в пределах скелетного сустава, определяющего операционное поле. Отдельный датчик также может быть размещен или прикреплен внутри сустава для подобной операции. Другие варианты применения включают размещение датчика в трубке, передающей хирургические жидкости к месту проведения хирургической операции и от него, либо в составе сборной кассеты или корпуса, содержащего одноразовое и/или многоразовое оборудование, применяемое при процедуре. Размер и размещение датчиков позволяет использовать датчики для обнаружения данных в реальном времени в стратегических местоположениях во время хирургической процедуры, а также позволяет использовать эти данные логикой системы управления хирургическими жидкостями, а также непосредственно хирургом или врачом-клиницистом для клинических выводов, связанных с данной процедурой.
На фиг. 1 приведена контекстная схема организации пространства для медицинского устройства, пригодная для применения с раскрытыми здесь конфигурациями. Согласно фиг.1 пространство для медицинского устройства 100 включает интегрированное микромеханическое устройство (микромеханическое устройство) 110 для размещения в хирургической среде. Микромеханическое устройство 110 в конкретной конфигурации представляет собой MEMS- или NEMS-устройство с возможностью осуществления беспроводной связи 112 с системой управления хирургическими жидкостями 120 или другим централизованным контроллером, отвечающим на сигналы 122, поступающие к (122-1) и от (122-2) антенны беспроводной связи 124. Микромеханическое устройство 110 включает приемник 115, реагирующий на сигналы 122-2 от антенны 124 для выполнения регистрации хирургических параметров, а также передатчик 113, настроенный на передачу зарегистрированных хирургических параметров обратно к системе управления хирургическими жидкостями 120 посредством сигналов 122-1. Микромеханическое устройство 110 может быть пассивным, то есть сигналы 122-2 также обеспечивают питание датчика 110. Микромеханическое устройство 110 является достаточно малым для того, чтобы принимаемые сигналы 122-2 обеспечивали работу и передачу зарегистрированных параметров 122-1, а микромеханическое устройство 110 может иметь и другие области регистрации, функции обработки или механические свойства, восприимчивые к сигналу 122-2.
Размещение микромеханического устройства 110 таково, что позволяет ему непосредственно регистрировать хирургические параметры, такие как давление, скорость потока и температура, и может включать прикрепление к внутренней части канюли 130, что показано в виде микромеханического устройства 110-1, вставленного в хирургический дренаж или полость тела пациента 132, возможно через эндоскопический зонд, показанный как 110-2, либо оно размещено (110-3) в кассете 134 набора трубок 136 для накачивания физиологического раствора в операционное поле. Микромеханическое устройство 110 после размещения активируется под действием сигнала 122-2, поступающего от системы управления хирургическими жидкостями 120, и выполняет задачи по регистрации, вычислению и передаче для возвращения зарегистрированных хирургических параметров 122-1. Конфигурация канюли 130 позволяет закреплять микромеханическое устройство 110-1 на внутренней части канала 140, который впоследствии вставляется в хирургический дренаж или полость, и через который поступает физиологический раствор, что более подробно обсуждается ниже в соответствии с фиг. 3. Компоновка зонда 138 позволяет размещать микромеханическое устройство 110-2 через любое подходящее эндоскопическое отверстие, а микромеханическое устройство 110-3, сопряженное с кассетой 134, расположено внутри кассеты 134 в отличие от традиционных подходов, при которых между кассетой 134 и сопряжением 142 на системе управления хирургическими жидкостями используется хрупкий передатчик, который, как оказалось, чувствителен к многократным установкам.
На фиг. 2 приведена блок-схема динамического считывания параметров согласно раскрытому здесь описанию.
На фиг. 1 и 2 на этапе 200 способ обеспечения динамической хирургической обратной связи включает программирование интегрированного микромеханического устройства для обеспечения определенной мощности, способностей регистрации и передачи данных для сбора и обратной передачи зарегистрированных данных. Способ подразумевает размещение микромеханического устройства 110 на пути жидкости, образованном в результате терапевтической процедуры согласно описанию на этапе 201. Микромеханическое устройство 110 представляет собой миниатюрный механизм, изготовленный с использованием технологий MEMS или NEMS, включающий электронику для процесса приема сигнала и его передачи, а также физическую конструкцию для регистрирующих функций и механических операций. Беспроводной сигнал 122-2 от системы управления жидкостями 120 активирует интегрированное микромеханическое устройство посредством запрограммированного передатчика 113/приемника 115 для передачи обратного сигнала, несущего информацию об измеренных хирургических параметрах, как раскрыто в описании этапа 202, а система управления жидкостями 120 принимает обратный сигнал 122-1 для оценки измеренных хирургических параметров, как показано на этапе 203. Измеренные параметры могут включать множество регистрируемых атрибутов или характеристик из операционного поля, например давление, определяемая с помощью датчика переменного сопротивления, скорость потока, определяемая с помощью отводного датчика или датчика захвата тока жидкости, либо температура, определяемая, например, с помощью биметаллического датчика температур.
На фиг. 3 представлена схема размещения датчика в среде по фиг. 1. На фиг. 1 и 3 приведен пример компоновки микромеханического устройства 110, используемого при эндоскопической операции на коленном суставе. Хирург размещает канюлю 130 через эндоскопический доступ 150 в коленном суставе 152 пациента. Канюля 130 проходит через кожу и мягкие ткани в дренируемую хирургическую полость 154 между бедренной костью 156 и большеберцовой костью 158. Микромеханическое устройство 110-1, прикрепленное ко внутренней части проводной трубки 160 канюли 130, регистрирует давление, скорость потока и температуру физиологического раствора, закачиваемого через подающую трубку для канюли 160 посредством размещения на пути жидкости в выводном конце 162 канюли 130. Вводной патрубок 164 прикрепляется к набору трубок 136 для подачи физиологического раствора через кассету 134 от системы управления жидкостями 120. Кассета 134 также может включать другое микромеханическое устройство 110-3 в кассете 134 для регистрации хирургических параметров в источнике физиологического раствора при выкачивании его из системы управления жидкостями 120.
В представленном примере интегрированные микромеханические устройства 110-1, 110-3 размещены в потоке жидкости, идущем из системы управления жидкостями 120 с целью непосредственной регистрации таких хирургических параметров, как: давление, скорость потока и температура. Микромеханические устройства 110 могут быть извлечены с помощью канюли 130 и набора трубок 134 (одноразовые изделия) после использования, поэтому низкие затраты на изготовление интегрированного микромеханического устройства 110 позволяют избежать чрезмерных расходов. В данной конкретной компоновке повышенная точность, обеспеченная непосредственной регистрацией параметров в операционном поле, позволяет избежать использования дополнительных медицинских устройств для измерения хирургических параметров, что дает возможность сохранить на том же уровне или снизить общие расходы на одну процедуру с использованием одноразовых элементов. Можно представить альтернативные варианты компоновки MEMS- и NEMS-устройств 110 для прикрепления к другим медицинским устройствам, например к специальному зонду 138, на второй канюле для эвакуации содержимого из дренируемой хирургической полости 154, либо с другими нативными и введенными хирургическими жидкостями (например, лекарственные средства, кровь и т.д.). В представленном примере компоновки медицинские устройства, такие как канюля 130 и набор трубок 136, являются инструментами одноразового или многоразового использования и не предназначены или не требуют присутствия в потоке жидкости дольше, чем на протяжении процедуры. Соответственно, изготовление изделия для одноразового использования позволяет снизить расходы на производство, поскольку микромеханические устройства не должны подвергаться длительному воздействию жидкости в отличие от перманентно имплантируемых объектов.
На фиг. 4-6 представлены блок-схемы обеспечения компоновки эндоскопических датчиков во время хирургической процедуры. Приведен пример компоновки для эндоскопической хирургической процедуры на коленном суставе 152, согласно которому используется система управления жидкостями 120 для доставки физиологического раствора для орошения замкнутого внутреннего пространства сустава во время операции. На фиг. 1 и 3-6 в среде медицинского устройства 100 способ измерения хирургических параметров согласно настоящему раскрытию включает определение хирургической дренируемой полости 154, которая принимает поток жидкости для терапевтической процедуры; при этом дренируемая полость 154 сообщается по меньшей мере с одним эндоскопическим инструментом 130, 138 для выполнения терапевтической процедуры согласно описанию на этапе 300. В предоставленном примере дренируемой хирургической полостью 154 является область скелетного сустава между суставными поверхностями (большеберцовая 158 и бедренная кость 156), как показано на этапе 301. При работе с другими хирургическими полостями или областями можно использовать подобные хирургические инструменты. Процесс инициализации включает программирование интегрированного микромеханического устройства 110, например MEMS или NEMS, на определенную мощность, способности регистрации и передачи данных, при этом микромеханическое устройство адаптируется для неинтрузионного прикрепления к эндоскопическому инструменту 130, 138 согласно описанию на этапе 302. Согласно иллюстрации ниже могут быть использованы различные компоновки для сопряжения микромеханического устройства 110 с хирургическим или эндоскопическим инструментом. Так, устройство 110 может быть приклеено или прикреплено ко внутренней кольцевой поверхности или каналу, трубке или проводнику, по которой происходит передача хирургических жидкостей, либо может быть прикреплено к внешней поверхности зонда 138, установленного в дренируемой полости 154 или операционном поле. В конкретных компоновках интегрированное микромеханическое устройство 110 может быть пассивным, то есть его способности регистрации инициируются при стимуляции внешним беспроводным сигналом 122-2, при этом микромеханическое устройство 110 программируется на определенную мощность, способности регистрации и передачи данных и способность реагировать на внешний беспроводной сигнал 122-2 согласно иллюстрации на этапе 303. Такие устройства 110 являются достаточно маленькими, чтобы ВЧ управляющий сигнал или другая форма электромагнитной волны была способна питать устройство 110 для получения мощности, достаточной для его работы. Необязательно в устройстве 110 может быть использован активный источник питания, например батарея.
Эндоскопический инструмент, к которому прикреплено устройство 110, вводит интегрированное микромеханическое устройство 110 в дренируемую хирургическую полость 154 посредством эндоскопического инструмента 130, 138 согласно этапу 304, обычно через один или более хирургических доступов 150, обычно используемых при эндоскопических, лапароскопических и других малоинвазивных процедурах. Эндоскопический инструмент 130, 138 вводят в дренажную полость 154 для размещения там интегрированного микромеханического устройства 110 на пути тока жидкости для терапевтической процедуры через эндоскопический инструмент 130, 138 согласно описанию на этапе 305.
На этапе 306 выполняют проверку определения того, действительно ли микромеханическое устройство 110 размещено внутри операционного поля либо прикреплено к внешней поверхности или к устройству. Когда поток жидкости находится в дренируемой хирургической полости, доступной для эндоскопических инструментов, зонд 138 или канюля 130 позволяют разместить интегрированное микромеханическое устройство 110 внутри дренируемой хирургической полости 154, куда направлен поток жидкости согласно иллюстрации на этапе 309. Размещение микромеханического устройства 110 включает прикрепление интегрированного микромеханического устройства к канюле 130, зонду 138 либо аналогичному хирургическому инструменту, а также размещение канюли 130 через хирургический доступ 150 для жидкостного сообщения с дренируемой хирургической полостью 154, куда поступает поток жидкости, согласно этапу 310. В дренируемой хирургической полости 154 эндоскопическим путем используются эпоксидные, клеевые клипсы, либо другие крепежные механизмы для фиксации интегрированного микромеханического устройства 110 к внутренней поверхности канюли 130, а канюлю 130 эндоскопически размещают в дренируемой хирургической полости 154 согласно иллюстрации на этапе 311. Микромеханическое устройство 110 непосредственно регистрирует хирургические параметры, поскольку характеристики жидкости внутри замкнутого внутреннего эндоскопического операционного поля могут отличаться от параметров, измеренных в других участках потока жидкости.
Раскрытый подход также может включать фиксацию интегрированного микромеханического устройства на пути потока жидкости в наборе трубок 136 системы управления жидкостями, в которой набор трубок 136 выполнен с возможностью сопряжения с эндоскопическим инструментом, таким как канюля 130, как раскрыто на этапе 307. Обычно набор трубок 136 используют для перемещения хирургических жидкостей, например физиологического раствора, в область операционного поля для орошения, удаления детрита или поддержания положительного давления в дренируемой хирургической полости 154 с целью обеспечения свободы манипуляций эндоскопическими инструментами. Такие конфигурации могут дополнительно включать прикрепление интегрированного микромеханического устройства 110 к кассете 134 или узлу картриджа, при этом узел кассеты выполнен с возможностью соединения с хирургическим насосом и функционирования в совокупности с набором трубок 136 и насосом для обеспечения регистрации хирургических параметров согласно описанию на этапе 308. Кассету 134 обычно используют для быстрого присоединения и отсоединения набора трубок 136 от системы управления жидкостями 120, которая включает насос; это необходимо для отделения системы подачи жидкости (набора трубок) для единичного пациента от системы управления жидкостями 120, которую многократно используют для процедур с участием множества пациентов. Традиционные подходы включают использование передатчика, соединенного с узлом кассеты 134, для регистрации хирургических параметров, однако такая компоновка передатчика является хрупкой и склонной к выходу из строя при многократном присоединении кассеты 134 к системе управления жидкостями 120.
Система управления жидкостями 120 направляет поток жидкости в дренируемую хирургическую полость 154 для поддержания положительного давления и эвакуации хирургического материала (детрита), появляющегося в ходе терапевтической процедуры, согласно описанию на этапе 312. Обычно этот процесс включает в себя закачивание физиологического раствора в дренируемую хирургическую полость 154 для эвакуации хирургического материала из операционного поля, так что интегрированное микромеханическое устройство 110 реагирует на закачиваемый физиологический раствор с регистрацией хирургических параметров согласно описанию на этапе 313. Благодаря микромеханической природе устройства 110 его наличие не мешает или каким-либо другим образом не искажает поток жидкости, а беспроводной интерфейс исключает использование дополнительных ограничений (проводов) в операционном поле.
Система управления жидкостями 120 активирует интегрированное микромеханическое устройство 110 для измерения хирургических параметров, включающих по меньшей мере один из следующих: давление, скорость потока и температуру жидкости, протекающей в дренируемой хирургической полости согласно раскрытию на этапе 314. Активация включает передачу беспроводного сигнала 122-2 к интегрированному микромеханическому устройству 110, поскольку интегрированное микромеханическое устройство 110 реагирует на беспроводной сигнал 122-2 и возвращает зарегистрированный хирургический параметр в виде возвратного беспроводного сообщения 122-1 согласно описанию на этапе 315. В случае использования пассивного устройства требования к мощности питания микромеханического устройства 110 зависят от полученного сигнала 122-2 и должны покрывать энергозатраты на измерение, вычисление и передачу хирургических параметров.
Система управления жидкостями 120 принимает зарегистрированные хирургические параметры посредством беспроводного сигнала 122-1 от микромеханического устройства 110 согласно описанию на этапе 316 для использования системой управления жидкостями 120 в качестве диагностической обратной связи и контрольной информации. В представленном примере компоновки хирургические параметры включают по меньшей мере один из следующих: давление, объем потока и температуру, то есть интегрированное микромеханическое устройство 110 настроено на предоставление сигнала, содержащего по меньшей мере одно из следующего: данные о переменном сопротивлении или давлении жидкости, измеренные в дренируемой хирургической полости 154 согласно описанию на этапе 317. Другие хирургические параметры и измеренные характеристики могут быть использованы в альтернативных компоновках.
Традиционные подходы показаны в публикации США №2007/0007184 (автор Voto), где, например, представлена система гемодиализа, использующая одноразовый датчик, встроенный в диализный контур. Сам по себе одноразовый датчик является практически или полностью инертным с биохимической точки зрения. В предлагаемом и заявляемом подходе датчик размещен в операционном поле, лежащем вне кровеносного сосуда и вне рециркулирующего потока, идущего к пациенту. Соответственно, подход Voto '184 отличается от предлагаемого подхода по датчикам, которые неактивны или не контактируют с кровью, так что измеряемая жидкость не возвращается обратно относительно одного и того датчика.
Публикация США №2010/0051552 (Rohde '552), относящаяся к K&L Gates LLP of Chicago, IL, раскрывает систему для мониторинга качества воды для диализа, диализных жидкостей и биологических жидкостей, обработанных диализными жидкостями. Согласно Rohde '552 датчики размещаются в различных положениях и способны определять множество свойств и параметров различных водных жидкостей, включая воду, диализную жидкость, отработавшую диализную жидкость и даже кровь [0029]. Тем не менее, в отличие от предложенного подхода, отсутствует демонстрация, пояснения или раскрытие использования MEMS- или NEMS-датчиков для мониторинга свойств жидкости в операционном поле, например, таком как скелетный сустав.
В публикации США №2006/0212097 Varadan раскрывает использование технологии MEMS при лечении болезни Паркинсона (БП). Процедура, известная под названием глубокая стимуляция головного мозга (ГСГМ), дает положительные результаты при лечении тремора, дискинезии и других ключевых двигательных симптомов БП. Varadan '097 поясняет использование биосовместимых материалов при микропроизводстве имплантируемых устройств и систем. Соответственно, при подходе Varadan используется водорастворимый, нетоксичный и неиммуногенный полимер, например поли(этиленгликоль) (РЕG)/поли(этиленоксид) (РЕО), широко известный полимер, который может использоваться в качестве силиконового покрытия для биологических целей, и обеспечивающий биосовместимость. Поскольку предлагаемый подход подразумевает использование MEMS-датчиков для хирургических процедур, нет необходимости в долгосрочной имплантации и требуемой для нее степени биосовместимости. Предложенный подход, напротив, подразумевает временное использование датчиков на пути потока жидкости - не дольше продолжительности хирургической процедуры, в отличие от долгосрочной имплантации в головной мозг, требующей использования биосовместимых материалов при микропроизводстве имплантируемых устройств и систем.
Специалистам в данной области техники будет вполне очевидно, что программы и способы измерения хирургических параметров, описанные здесь, могут быть воплощены и выполнены на практике во множестве форм, включая, но не ограничиваясь, следующим: а) информация, постоянно хранящаяся в защищенном от записи носителе информации, например в устройствах ROM; б) информация, периодически хранящаяся на доступном для записи несъемном носителе информации, например на гибких дисках, магнитных лентах, компакт-дисках (CD), устройствах RAM и других магнитных и оптических носителях; либо в) информация, которая перемещается в компьютер через средства связи, такие как электронная сеть, например Интернет или телефонные модемные линии. Операции и способы могут быть реализованы в виде исполняемого программного объекта в форме набора запрограммированных инструкций для исполнения процессором, способным считывать и исполнять эти инструкции. В качестве альтернативы операции и способы, раскрытые здесь, могут быть воплощены целиком или частично с использованием компонентов аппаратного обеспечения, таких как специализированные интегральные микросхемы (ASIC), вентильные матрицы с эксплуатационным программированием (FPGA), конечные автоматы, контроллеры или другие аппаратные компоненты или устройства, либо комбинации аппаратных, программных и микропрограммных компонентов.
Несмотря на то, что система и способ измерения хирургических параметров представлены детально и описаны со ссылкой на варианты их воплощения, специалистам в данной области техники будет очевидна возможность различных изменений формы и деталей без отклонения от общего объема изобретения, очерченного прилагаемой формулой изобретения.





Изобретение относится к медицине. Способ обеспечения динамической хирургической обратной связи, содержащий: программирование интегрированного микромеханического устройства для обеспечения определенной мощности, способностей регистрации и передачи данных; прикрепление интегрированного микромеханического устройства ко внутренней кольцевой поверхности первой канюли на ее выводном конце; вставку первой канюли в хирургическую полость в скелетном суставе; орошение хирургической полости посредством обеспечения тока жидкости через первую канюлю; активацию интегрированного микромеханического устройства с помощью беспроводного сигнала, тем самым побуждая интегрированное микромеханическое устройство к передаче обратного сигнала, несущего информацию об измеренных хирургических параметрах, полученных от потока жидкости; и прием обратного сигнала для оценки измеренных хирургических параметров. Технический результат заключается в обеспечении динамической обратной связи во время проведения хирургической операции. 4 н. и 18 з.п. ф-лы, 6 ил.
1. Способ измерения хирургических параметров в среде медицинского устройства, содержащий:
идентификацию дренируемой хирургической полости, принимающей поток жидкости для терапевтической процедуры, при этом дренируемая хирургическая полость сообщается по меньшей мере с одним эндоскопическим инструментом для выполнения терапевтической процедуры;
программирование интегрированного микромеханического устройства на определенную мощность, способности регистрации и передачи данных, при этом данное интегрированное микромеханическое устройство адаптировано для неинтрузивного прикрепления к эндоскопическому инструменту;
введение интегрированного микромеханического устройства в дренируемую хирургическую полость посредством эндоскопического инструмента;
направление потока жидкости в дренируемую хирургическую полость для поддержания положительного давления и эвакуации хирургического материала, появляющегося вследствие проведения терапевтической процедуры;
размещение интегрированного микромеханического устройства на пути тока жидкости при терапевтической процедуре посредством эндоскопического инструмента;
активацию интегрированного микромеханического устройства для измерения хирургических параметров, включающих по меньшей мере одно из следующего: давление, скорость потока и температуру жидкости, текущей в дренируемой хирургической полости; и
прием измеренных хирургических параметров через беспроводной интерфейс от интегрированного микромеханического устройства.
2. Способ по п. 1, отличающийся тем, что дренируемая хирургическая полость представляет собой область в скелетном суставе между суставными поверхностями.
3. Способ обеспечения динамической хирургической обратной связи, содержащий:
программирование интегрированного микромеханического устройства для обеспечения определенной мощности, способностей регистрации и передачи данных;
прикрепление интегрированного микромеханического устройства ко внутренней кольцевой поверхности первой канюли на ее выводном конце;
вставку первой канюли в хирургическую полость в скелетном суставе;
орошение хирургической полости посредством обеспечения тока жидкости через первую канюлю;
активацию интегрированного микромеханического устройства с помощью беспроводного сигнала, тем самым побуждая интегрированное микромеханическое устройство к передаче обратного сигнала, несущего информацию об измеренных хирургических параметрах, полученных от потока жидкости; и
прием обратного сигнала для оценки измеренных хирургических параметров.
4. Способ по п. 3, отличающийся тем, что активация дополнительно включает передачу беспроводного сигнала к интегрированному микромеханическому устройству, при этом интегрированное микромеханическое устройство реагирует на беспроводной сигнал для возврата обратного сигнала, несущего информацию об измеренных хирургических параметрах.
5. Способ по п. 3, отличающийся тем, что интегрированное микромеханическое устройство является пассивным, то есть его функции сбора данных инициируются посредством стимуляции беспроводным сигналом.
6. Способ по п. 3, отличающийся тем, что орошение дополнительно включает закачивание физиологического раствора в хирургическую полость через первую канюлю и эвакуацию физиологического раствора из хирургической полости с помощью второй канюли.
7. Способ по п. 3, отличающийся тем, что хирургические параметры являются по меньшей мере одними, выбранными из группы, состоящей из: параметров, несущих информацию о давлении жидкости; параметров, несущих информацию об объеме потока; и параметров, несущих информацию о температуре жидкости.
8. Способ по п. 3, отличающийся тем, что дополнительно включает прикрепление второго интегрированного микромеханического устройства на пути тока жидкости в наборе трубок системы управления жидкостями, при этом набор трубок выполнен с возможностью сопряжения с эндоскопическим инструментом.
9. Способ по п. 8, отличающийся тем, что дополнительно включает прикрепление второго интегрированного микромеханического устройства к узлу кассеты, выполненному с возможностью соединения с хирургическим насосом и функционирования в сопряжении с набором трубок и насосом для обеспечения регистрации хирургических параметров.
10. Способ по п. 3, отличающийся тем, что первая канюля является инструментом одноразового использования.
11. Способ по п. 3, отличающийся тем, что интегрированное микромеханическое устройство является пассивным устройством, получающим питание от беспроводного сигнала для активации.
12. Способ по п. 3, отличающийся тем, что прием обратного сигнала содержит прием обратного сигнала, в котором первый измеренный параметр из измеренных параметров является параметром, несущим информацию о скорости потока жидкости через канюлю; и
дополнительно содержащий контролирование потока жидкости на основе параметра, несущего информацию о скорости потока жидкости через канюлю.
13. Аппарат для обеспечения динамической хирургической обратной связи, включающий:
интегрированное микромеханическое устройство, запрограммированное на определенную мощность и способности регистрации и передачи данных;
прикрепление к хирургическому инструменту интегрированного микромеханического устройства на пути потока жидкости, перемещаемой для целей терапевтической процедуры;
при этом интегрированное микромеханическое устройство включает:
приемник для активации интегрированного микромеханического устройства посредством беспроводного сигнала для передачи обратного сигнала, несущего информацию об измеренных хирургических параметрах; и
передатчик для передачи обратного сигнала к системе управления жидкостями, настроенной на прием обратного сигнала для оценки измеренных хирургических параметров, и
дополнительно включает прикрепление к хирургическому инструменту с использованием трубопровода для приема закачиваемого физиологического раствора в дренируемую хирургическую полость для эвакуации хирургического материала из операционного поля, при этом интегрированное микромеханическое устройство реагирует на закачиваемый физиологический раствор с регистрацией хирургических параметров.
14. Аппарат по п. 13, отличающийся тем, что приемник реагирует на передаваемый беспроводной сигнал, при этом интегрированное микромеханическое устройство реагирует на беспроводной сигнал для возврата зарегистрированного хирургического параметра.
15. Аппарат по п. 14, отличающийся тем, что интегрированное микромеханическое устройство является пассивным настолько, что его способности регистрации инициируются при стимуляции внешним беспроводным сигналом, при этом интегрированное микромеханическое устройство запрограммировано для определенной мощности, способностей регистрации и передачи данных и способности реагировать на внешний беспроводной сигнал.
16. Аппарат по п. 13, отличающийся тем, что размещение дополнительно включает фиксацию интегрированного микромеханического устройства на пути потока жидкости в наборе трубок системы управления жидкостями, в которой набор трубок выполнен с возможностью сопряжения с эндоскопическим инструментом.
17. Аппарат по п. 14, отличающийся тем, что дополнительно включает прикрепление интегрированного микромеханического устройства к узлу кассеты, при этом узел кассеты выполнен с возможностью соединения с хирургическим насосом и функционирования в совокупности с набором трубок и насосом для обеспечения регистрации хирургических параметров.
18. Аппарат по п. 14, отличающийся тем, что дополнительно включает присоединение интегрированного микромеханического устройства к внутренней поверхности канюли, эндоскопически размещаемой через хирургический доступ в дренируемой хирургической полости, в которую поступает поток жидкости, для обеспечения жидкостного сообщения.
19. Хирургическая система для динамической регистрации хирургических параметров, содержащая:
первую канюлю, которая определяет внутреннюю кольцевую поверхность и выводной конец;
интегрированное микромеханическое устройство, выполненное с возможностью измерения хирургических параметров, указанное интегрированное микромеханическое устройство прикреплено к внутренней кольцевой поверхности первой канюли на ее выводном конце;
систему управления, соединенную беспроводным образом с интегрированным микромеханическим устройством и выполненную с возможностью передачи беспроводного сигнала интегрированному микромеханическому устройству и приема обратного сигнала от интегрированного микромеханического устройства;
при этом интегрированное микромеханическое устройство содержит:
приемник, выполненный с возможностью приема беспроводного сигнала и активации интегрированного микромеханического устройства для измерения хирургических параметров; и
передатчик, выполненный с возможностью передачи обратного сигнала, кодирующего хирургические параметры.
20. Хирургическая система по п. 19, отличающаяся тем, что:
система управления жидкостно соединена с первой канюлей и выполнена с возможностью орошения хирургической полости жидкостью через первую канюлю; и
интегрированное микромеханическое устройство выполнено с возможностью измерения хирургических параметров, которые являются по меньшей мере одним, выбранным из группы, состоящей из: давление жидкости, поток жидкости и температура жидкости.
21. Хирургическая система по п. 19, отличающаяся тем, что система управления выполнена с возможностью доставки жидкости к хирургической полости через первую канюлю.
22. Хирургическая система по п. 20, отличающаяся тем, что система управления дополнительно выполнена с возможностью контролирования потока жидкости на основе обратного сигнала.
| K | |||
| J | |||
| REBELLO, "Applications of MEMS in surgery", Res | |||
| Technol | |||
| Dev | |||
| Center, Johns Hopkins Univ., Laurel, MD, USA, опубликованный в "Proceedings of the IEEE" (Volume:92, Issue:1), январь 2004 | |||
| US 6926670 B2, 09.08.2005 | |||
| US 2005269251 A1, 08.12.2005 | |||
| US 2010185179 A1, 22.07.2010. |

