ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА СМЕЖНЫЕ ИЗОБРЕТЕНИЯ
[0001] Данная заявка истребует приоритет по предварительной заявке на патент США № 61/354009, поданной 11 июня 2010 года, содержание которой полностью включено в настоящий документ путем ссылки.
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
[0002] Настоящее изобретение относится к системам упаковки, выбора и доставки нитей к месту операции в организме пациента во время хирургических операций, включая малоинвазивные хирургические операции.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0003] Малоинвазивные хирургические (МИХ) операции позволяют отказаться от открытого хирургического вмешательства в пользу менее травматичной закрытой или локальной хирургии. Малоинвазивные хирургические операции обычно включают удаленные манипуляции инструментами с опосредованным наблюдением операционного поля при помощи эндоскопа или аналогичного устройства и выполняются через небольшое отверстие доступа в коже или через полость организма или анатомическое отверстие. Благодаря этому малоинвазивные медицинские методики позволяют уменьшить повреждение тканей во время диагностических или хирургических операций, тем самым сокращая период восстановления пациента, уменьшая дискомфорт и отрицательные побочные эффекты. Поэтому малоинвазивные медицинские методики позволяют сократить среднюю продолжительность пребывания в больнице в связи с операциями, по сравнению с обычной открытой хирургией.
[0004] Одной из форм малоинвазивной хирургии является эндоскопия. Наиболее распространенной формой эндоскопии, вероятно, является лапароскопия, которая представляет собой малоинвазивное обследование или хирургическое вмешательство, выполняемое в брюшной полости. При проведении обычного лапароскопического хирургического вмешательства в брюшную полость пациента инсуфлируют газ, и через малые (приблизительно 1,3 см (½ дюйма)) разрезы вводят гильзы канюли для создания отверстий доступа для лапароскопических хирургических инструментов. Лапароскопические хирургические инструменты, в общем, включают в себя эндоскоп для визуализации операционного поля и специальных хирургических инструментов, который, в некоторых вариантах осуществления, вводят через отверстия доступа. Инструменты могут включать в себя, например, зажимы, щипцы, сшивающие инструменты и держатели нити. Хирургические инструменты могут быть или не быть аналогичны тем, которые используются в традиционной (открытой) хирургии; обычно рабочий конец каждого инструмента отделен от рукоятки удлиненным стволом, а его размер и конфигурация позволяют вводить инструмент в отверстие доступа. Для выполнения хирургических операций хирург проводит хирургические инструменты через отверстия доступа к месту операции внутри организма и управляет ими снаружи брюшной полости. Хирург наблюдает за ходом операции через монитор, на котором выводится изображение операционного поля, полученное при помощи лапароскопа. Аналогичные эндоскопические методики используются, например, в артроскопии, торакоскопии, ретроперитонеоскопии, пельвископии, нефроскопии, цистоскопии, цистерноскопии, синоскопии, гистероскопии, уретроскопии, краниотомии и хирургии естественных отверстий тела (например, дыхательных путей и желудочно-кишечного тракта).
[0005] Технология МИХ с использованием управляемых вручную инструментов имеет ряд недостатков. Например, существующие инструменты МИХ ограничивают свободу хирурга при размещении инструмента, характерную для открытой хирургии. Большинство современных лапароскопических инструментов имеет жесткий ствол, что может осложнить доступ к месту операции через разрез малого размера. Кроме того, длина и конструкция большинства эндоскопических инструментов снижают способность хирурга чувствовать усилие, с которым инструмент воздействует на ткани и органы в области операционного поля. Нехватка функциональной подвижности и чувствительности эндоскопических инструментов препятствует более широкому распространению малоинвазивной хирургии.
[0006] Для улучшения функциональной подвижности хирурга во время работы на внутреннем операционном поле и для обеспечения возможности для хирурга оперировать пациента дистанционно были разработаны малоинвазивные системы дистанционной хирургии. В системе дистанционной хирургии хирург получает изображение операционного поля, так же как при эндоскопии. Однако вместо непосредственного управления хирургическими инструментами хирург проводит хирургическую операцию у пациента, управляя устройствами ввода или управления на пульте управления. Устройства ввода или управления управляют движением хирургических инструментов посредством дистанционно-управляемого манипулятора. Системы дистанционной хирургии, в зависимости от конкретной системы, могут в некоторой степени, но не полностью, решить проблему нехватки функциональной подвижности и чувствительности эндоскопических инструментов. Хирургические системы дистанционного управления обычно называют роботохирургическими или роботизированными хирургическими системами.
[0007] Многие процедуры МИХ, включая процедуры дистанционной МИХ, предполагают применение устройств для закрытия ран, таких как нити, скобы и заклепки, для закрытия ран, восстановления травматических повреждений или дефектов, соединения тканей (сближения разорванных тканей, закрытия анатомической полости, фиксации одного или множества слоев тканей, наложения анастомоза между двумя полыми/просветными структурами, смыкания тканей, присоединения или повторного соединения тканей в соответствующем месте анатомической локализации), присоединения инородных элементов к тканям (фиксации медицинских имплантатов, устройств, протезов и других функциональных или поддерживающих устройств), а также для перемещения тканей в новую анатомическую локализацию (восстановление, подъем ткани, пересадка ткани и сопутствующие процедуры), а также многих других приложений. Нить, как правило, состоит из волокнистой лигатуры, прикрепленной к игле с острым концом. Лигатуры могут быть изготовлены из ряда различных материалов, включая биорассасывающиеся (т.е. со временем полностью распадающиеся в организме) или нерассасывающиеся (постоянные; неразлагающиеся) материалы. Установлено, что рассасывающиеся нити особенно удобны для использования в ситуациях, когда удаление нити может угрожать восстановленному участку, или когда благодаря естественному процессу заживления исчезает необходимость в обеспечиваемой шовным материалом поддержке после завершения процесса заживления; как, например, при наложении на кожу несложного шва. Неразлагающиеся (нерассасывающиеся) нити используют при лечении ран, заживление которых в некоторых вариантах осуществления может затянуться, или в случаях, когда шовный материал необходим для обеспечения физической поддержки для раны в течение продолжительного периода времени; как, например, при восстановлении глубоких тканей, при лечении ран, требующем большого натяжения, в ортопедии и при некоторых типах хирургического анастомоза. Кроме этого, существует множество разнообразных хирургических игл, и форму и размер тела иглы, а также конфигурацию конца иглы, как правило, выбирают исходя из потребностей конкретного случая.
[0008] При использовании стандартной нити хирургическую иглу проводят через необходимую ткань с одной стороны раны и затем с другой стороны раны. Затем из нити формируют «петлю», завершающуюся узлом на нити для удержания раны в закрытом состоянии. Завязывание узла требует времени и вызывает ряд осложнений, включая без ограничений: (i) проскальзывание (состояние, при котором нить, обычно узел, проталкивается через кожу после подкожного закрытия раны), (ii) инфекцию (бактерии часто могут распространяться и размножаться в образованных узлом пространствах), (iii) объем/массу (значительное количество остающегося в ране шовного материала представляет собой часть, содержащую узел), (iv) смещение (узлы могут скользить или развязываться), и (v) раздражение (узлы выступают в качестве объемного «инородного тела» в ране). Петли нити, необходимые при завязывании узлов, могут вызвать ишемию (узлы могут создать точки натяжения, сдавливающие ткань и ограничивающие приток крови к данному участку) и повышенный риск расхождения или разрыва хирургической раны. Завязывание узла также представляет собой трудоемкий процесс и занимает существенную часть времени, требуемого для закрытия хирургической раны. Дополнительное операционное время не только опасно для пациента (возрастает риск осложнений по мере увеличения времени, проведенного под наркозом), но также увеличивает общую стоимость операции (средняя стоимость многих хирургических процедур составляет от 15 долл. до 30 долл. за минуту операционного времени). Время, необходимое на завязывание нити, и возможные осложнения усугубляются нехваткой функциональной подвижности и чувствительности МИХ инструментов.
[0009] Самоудерживающиеся нити (включая нити с зазубринами) отличаются от стандартных нитей тем, что самоудерживающиеся нити имеют многочисленные фиксаторы (такие как зазубрины), фиксирующие самоудерживающуюся нить в ткани после наложения шва и препятствующие движению нити в направлении, противоположном направлению, в которое обращены фиксаторы, устраняя тем самым необходимость создания узлов для скрепления соседних тканей (закрытие «без узлов»). Это облегчает и ускоряет наложение самоудерживающихся нитей по сравнению с обычными нитями. Устройства с зазубринами для соединения тканей непрерывным швом описаны ранее, например, в патенте США № 5374268, описывающем фиксаторы с выступами типа зазубрин, а шовные хирургические материалы, имеющие боковые элементы с зазубринами, описаны в патентах США №№ 5584859 и 6264675. Нити с множеством зазубрин, расположенных вдоль большей части нити, описаны в патенте США № 5931855, раскрывающем однонаправленную нить с зазубринами, и в патенте США № 6241747, описывающем двунаправленную нить с зазубринами. Способы и устройство для формирования зазубрин на нитях описаны, например, в патенте США № 6848152. Необходимо отметить, что все патенты, патентные заявки и публикации патентов, упоминаемые в настоящем документе, полностью включены в настоящий документ путем ссылки. Самоудерживающиеся нити позволяют добиться лучшего сближения краев раны, равномерного распределения натяжения по всей длине раны (сокращая участки чрезмерного натяжения, которые могут порваться или привести к ишемии), снижения объема шовного материала, остающегося в ране (путем устранения узлов) и сокращения риска проскальзывания (выталкивание шовного материала, как правило, узлов, через поверхность кожи). Считается, что все данные свойства способствуют сокращению рубцевания, улучшению эстетического вида и повышению стабильности раны по сравнению с закрытием ран при помощи гладких нитей или скоб. Таким образом, самоудерживающиеся нити, благодаря тому, что такие нити не требует закрепления при помощи узлов, обеспечивают более благоприятный клинический результат для пациентов и позволяют сэкономить время и снизить затраты, связанные с продолжительным хирургическим вмешательством и лечением в послеоперационном периоде.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0010] В общем, настоящее изобретение относится к хирургическим инструментам для доставки нитей, в частности, самоудерживающихся нитей, к месту операции в ходе операции МИХ, включая роботизированные операции МИХ. Несмотря на массу преимуществ однонаправленной и двунаправленной самоудерживающихся нитей для МИХ и дистанционной МИХ, по-прежнему сохраняется необходимость в улучшении конструкции нити с целью повышения ее функциональности и/или придания дополнительной функциональности. Настоящее изобретение преодолевает проблемы и недостатки предшествующего уровня техники, предлагая комплексы и системы для доставки самоудерживающихся нитей к месту операции. Для наложения на операционное поле самоудерживающихся нитей для сшивания, сближения и удерживания ткани можно использовать эндоскопические и/или телехирургические инструменты. Самоудерживающиеся нити обеспечивают преимущества, компенсирующие нехватку функциональной подвижности и чувствительности существующих инструментов, используемых в МИХ и дистанционной МИХ. Это позволяет сократить время, затрачиваемое на операцию, и улучшить клинический результат для пациента.
[0011] В соответствии с одним аспектом настоящего изобретения способ выполнения операции МИХ в полости организма пациента включает в себя предоставление комплекса шовного материала, содержащего нить или самоудерживающуюся нить, и введение комплекса к месту операции внутри организма пациента для его использования в ходе операции МИХ. Затем нить или самоудерживающуюся нить с помощью инструмента для МИХ используют для сшивания, сближения и/или фиксации тканей.
[0012] В некоторых вариантах осуществления комплекс шовного материала вводят в полость при помощи телехирургического инструмента доставки нити. Инструмент доставки нити обеспечивает доставку нити в полость под управлением хирурга и размещает нить таким образом, что, в некоторых вариантах осуществления, хирург накладывает нить, управляя ею при помощи инструментов МИХ.
[0013] В некоторых вариантах осуществления комплекс шовного материала вводят в полость при помощи телехирургической системы доставки нити. Телехирургическая система доставки нити обеспечивает доставку нити в полость при помощи дистанционно-управляемого манипулятора под контролем хирурга и размещает нить таким образом, что, в некоторых вариантах осуществления, хирург накладывает нить, управляя ею при помощи инструментов МИХ.
[0014] В некоторых вариантах осуществления комплекс шовного материала включает в себя катушку для нити и самоудерживающуюся нить. Катушка удерживает с возможностью удаления одну или более самоудерживающихся нитей и хирургические иглы.
[0015] В конкретном варианте осуществления одна или более нитей удерживается в картридже с возможностью удаления. Картридж выбирают и прикрепляют к системе доставки нити, которая доставляет картридж, и нить к месту операции. В некоторых вариантах осуществления имеется множество различных картриджей с различными нитями.
[0016] В конкретном варианте осуществления одна или более нитей удерживается в картридже с возможностью удаления. Картридж выбирают и прикрепляют к системе доставки нити, которая доставляет картридж, и нить к месту операции.
[0017] В некоторых вариантах осуществления имеется множество различных картриджей с различными нитями, причем картриджи обладают конструктивными особенностями, позволяющими идентифицировать и/или выбирать их при помощи автоматической системы доставки, реагирующей на команды хирурга.
[0018] В некоторых вариантах осуществления картриджи для нити снабжены видимыми и/или машиночитаемыми метками, кодами, маркерами и т.п., указывающими на одно или более свойств нити, загружаемой в картридж.
[0019] Ниже приведено подробное описание одного или более вариантов осуществления, включая варианты осуществления, указанные в параграфах 124-195. Другие свойства, цели и преимущества будут понятны из описания, фигур и формулы изобретения. Кроме этого, содержание всех упоминаемых в настоящем документе патентов и заявок на патент полностью включено в настоящий документ путем ссылки.
КРАТКОЕ ОПИСАНИЕ ФИГУР
[0020] Свойства настоящего изобретения, его сущность и многочисленные преимущества станут понятны благодаря сопроводительным фигурам и приведенному ниже подробному описанию различных вариантов осуществления.
[0021] На ФИГ. 1A представлен вид в перспективе двунаправленной самоудерживающейся нити в соответствии с вариантом осуществления настоящего изобретения.
[0022] На ФИГ. 1B представлен увеличенный вид части двунаправленной нити, показанной на ФИГ. 1A.
[0023] На ФИГ. 1C представлен вид инструмента для доставки нити в соответствии с одним вариантом осуществления настоящего изобретения.
[0024] На ФИГ. 1D представлен увеличенный вид одного варианта осуществления катушки нити, которая, в некоторых вариантах осуществления, используется в показанном на ФИГ. 1C инструменте для доставки нити в соответствии с одним вариантом осуществления настоящего изобретения.
[0025] На ФИГ. 1E представлен вид в разрезе тела пациента с иллюстрацией доставки нити, осуществляемой при помощи инструмента для доставки нити, показанного на ФИГ. 1C.
[0026] На ФИГ. 1F представлен вид операционного поля с иллюстрацией применения инструмента для доставки нити, показанного на ФИГ. 1C.
[0027] На ФИГ. 1G представлено изображение операционного поля, передаваемое хирургу и иллюстрирующее применение инструмента для доставки нити, показанного на ФИГ. 1C.
[0028] На ФИГ. 1H показана часть нити, показанной на ФИГ. 1A, включая необязательный тампон.
[0029] На ФИГ. 2A показан инструмент для доставки нити, допустимый для использования совместно с роботизированной хирургической системой в соответствии с одним вариантом осуществления настоящего изобретения; и хирургический манипулятор, допустимый для использования с инструментом для доставки нити.
[0030] На ФИГ. 2B и 2C показано введение инструмента для доставки нити при помощи хирургического манипулятора в соответствии с одним вариантом осуществления настоящего изобретения.
[0031] На ФИГ. 2D представлен вид сбоку инструмента для доставки нити, установленного на хирургическом манипуляторе.
[0032] На ФИГ. 2E и 2F показана хирургическая система, и дано ее схематичное описание, для управления хирургическими манипуляторами и инструментами для доставки нити, показанными на ФИГ. 2A-2D.
[0033] На ФИГ. 3A и 3B показана доставка картриджа для нити, осуществляемая при помощи альтернативного инструмента для доставки нити в соответствии с одним вариантом осуществления настоящего изобретения.
[0034] На ФИГ. 3C и 3D представлены вид изнутри и вид в разрезе, соответственно, инструмента для доставки нити, показанного на ФИГ. 3A и 3B.
[0035] На ФИГ. 3E и 3F представлены различные виды картриджа для доставки нити, который можно использовать совместно с показанным на ФИГ. 3A-3D инструментом для доставки нити в соответствии с одним вариантом осуществления настоящего изобретения.
[0036] На ФИГ. 4A-4H показаны картриджи для нити в соответствии с вариантами осуществления настоящего изобретения.
[0037] На ФИГ. 5A-5C показан магазин картриджей для нити в соответствии с одним вариантом осуществления настоящего изобретения.
[0038] На ФИГ. 6A-6D показаны альтернативные системы самоудерживающихся нитей, имеющих на одном конце фиксатор.
[0039] На ФИГ. 6E-6F представлены виды картриджа для удерживания еще одной из альтернативных систем самоудерживающихся нитей, показанных на ФИГ. 6A-6D.
[0040] На ФИГ. 6G-6H представлены виды картриджа/катушки для удерживания еще одной из альтернативных систем самоудерживающихся нитей, показанных на ФИГ. 6A-6D.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
ОПРЕДЕЛЕНИЯ
[0041] Ниже приведены определения отдельных терминов, используемых в настоящем документе в некоторых вариантах осуществления.
[0042] Термин «самоудерживающаяся система» относится к самоудерживающейся нити вместе с устройствами для наложения шва на ткань. Такие устройства для наложения швов включают в себя без ограничений хирургические иглы и другие устройства для наложения швов, в том числе достаточно жесткие и острые концы нити, позволяющие прокалывать ткань.
[0043] Термин «самоудерживающаяся нить» относится к нити, в которой на шовном волокне имеются структурные элементы для зацепления ткани без помощи узла или шовного фиксатора. Самоудерживающиеся нити, описанные в настоящем документе, получают любым соответствующим способом, включая без ограничений литьевое прессование, штамповку, нарезку, экструзию, использование лазера и т.п. Что касается нарезки, в некоторых вариантах осуществления для тела нити изготавливают или покупают полимерные нити или волокна, на которых далее нарезают фиксаторы; фиксаторы, в некоторых вариантах осуществления, нарезают вручную, при помощи лазера или механическим способом, используя для этого лезвия, режущие диски, шлифовальные диски и т.п. Чтобы контролировать размер, форму и глубину разреза 210, в некоторых вариантах осуществления в процессе нарезки режущее устройство или лигатуру перемещают относительно друг друга, или, в некоторых вариантах осуществления, подвижными могут быть оба элемента. Конкретные способы нарезки зазубрин на волокне описаны в заявке на патент США № 09/943733 «Способ формирования зазубрин на нити и устройство для его осуществления», поданной Genova et al., и в заявке на патент США № 10/065280 «Нити с зазубринами», поданной Leung et al., обе заявки включены в настоящий документ путем ссылки.
[0044] Термин «тканевый фиксатор» (или просто «фиксатор») относится к физическому элементу на шовном волокне, выполненному с возможностью обеспечения механического зацепления ткани и сопротивления перемещению нити в по меньшей мере одном из осевых направлений. Только в качестве примера, тканевый фиксатор или фиксаторы могут включать в себя крючки, зубцы, зазубрины, острия, выступы, утолщения, якоря, бугорки, шпоры, гофры, заостренные наконечники, звездочки, устройства захвата ткани, устройства сцепления, шероховатые поверхности, неровные поверхности, поверхностные дефекты, края, грани и т.п. В некоторых конфигурациях тканевые фиксаторы выполнены с возможностью зацепления ткани и сопротивления перемещению нити в направлении, противоположном направлению, в котором врач накладывает шов на ткань, при этом фиксаторы по существу ориентированы в направлении наложения шва. В некоторых вариантах осуществления фиксаторы прилегают к поверхности при протягивании нити в направлении наложения шва и открываются или «раскрываются» при протягивании нити в направлении, противоположном направлению наложения шва. Поскольку прокалывающий ткань конец каждого фиксатора при продвижении через ткань в процессе наложения шва обращен в направлении, противоположном направлению наложения шва, тканевые фиксаторы на данной стадии не зацепляются за ткань. После наложения самоудерживающейся нити при воздействии усилия, направленного в другом направлении (часто по существу противоположном направлению наложения шва), фиксаторы выходят из положения, в котором они находились при наложении шва (т.е. из положения, в котором они по существу уложены вдоль тела нити), и концы фиксаторов отходят (или «раскрываются») от тела нити, зацепляясь за и проникая в окружающую ткань, и таким образом захватывая ткань между фиксатором и телом нити; тем самым «закрепляя» или фиксируя самоудерживающуюся нить на месте. В отдельных других вариантах осуществления тканевые фиксаторы, в некоторых вариантах осуществления, выполнены с возможностью перемещения нити в одном направлении и препятствования перемещению нити в другом направлении без их раскрытия или развертывания. В некоторых других конфигурациях тканевый фиксатор, в отдельных вариантах осуществления, выполнен или объединен с другими тканевыми фиксаторами, препятствуя перемещению шовного волокна в обоих направлениях. Как правило, нить с такими фиксаторами накладывают через устройство, такое как канюля, препятствующее контакту фиксаторов с тканью до того момента, пока нить не окажется в требуемом месте. В некоторых вариантах осуществления механические фиксаторы заменяют и/или усиливают химическими и/или адгезивными фиксаторами, обеспечивающими зацепление за ткань путем приклеивания или физического и/или химического связывания нити и прилегающей к ней ткани.
[0045] Термин «конфигурации фиксаторов» относится к конфигурациям тканевых фиксаторов и может включать в себя такие свойства, как размер, форма, гибкость, характеристики поверхности и т.п. Иногда данные конфигурации также обозначаются в тексте как «конфигурации зазубрин».
[0046] Термин «распределение фиксаторов» относится к размещению фиксаторов на поверхности хирургической нити и может включать в себя вариации ориентации, схемы размещения, шага и угла спирали.
[0047] Термин «двунаправленная нить» относится к самоудерживающейся нити с фиксаторами, ориентированными на одном конце в одном направлении и на другом конце в другом направлении. Двунаправленная нить, как правило, имеет иглу на каждом конце лигатуры. Большинство двунаправленных нитей имеют переходный участок, расположенный между участками с зазубринами, ориентированными в разных направлениях.
[0048] Термин «переходный участок» относится к части двунаправленной нити без фиксаторов (без зазубрин), расположенной между первым набором фиксаторов (зазубрин), ориентированных в одном направлении, и вторым набором фиксаторов (зазубрин), ориентированных в другом направлении. Переходный участок может располагаться приблизительно в середине самоудерживающейся нити или ближе к одному концу самоудерживающейся нити с образованием асимметричной системы самоудерживающейся нити.
[0049] Термин «лигатура» относится к волокнистому телу нити. В некоторых вариантах осуществления лигатура представляет собой монофиламентную нить или содержит множество волокон, как, например, плетеная нить. В некоторых вариантах осуществления лигатура изготовлена из любого соответствующего биосовместимого материала и в некоторых вариантах осуществления дополнительно обработана любым соответствующим биосовместимым материалом, либо для повышения прочности нити, эластичности, долговечности или других качественных характеристик, либо для придания нити дополнительных функций помимо функций соединения тканей, репозиции тканей или прикрепления к тканям инородных элементов.
[0050] Термин «монофиламентная нить» относится к нити, в которой собственно нить является монофиламентной.
[0051] Термин «плетеная нить» относится к нити, в которой лигатура является мультифиламентной. Волокна в таких лигатурах, как правило, сплетены, скручены или сотканы вместе.
[0052] Термин «рассасывающаяся нить» (также обозначаемая как «биологически рассасывающаяся нить» или «абсорбирующая нить») относится к нити, которая разлагается или поглощается организмом после введения в ткань. Как правило, процесс разложения является по меньшей мере частично опосредованным или протекает внутри биологической системы. Термин «разложение» относится к процессу разрыва цепи, в ходе которого полимерная цепь распадается на олигомеры и мономеры. Разрыв цепи можно осуществлять различными механизмами, включая, например, химическую реакцию (например, гидролиз, окислительно-восстановительные, ферментативные реакции или их комбинация) или тепловые или фотолитические процессы. В некоторых вариантах осуществления процесс разложения полимеров характеризуют, например, при помощи гель-проникающей хроматографии (ГПХ), которая отслеживает изменения молекулярной массы полимера в процессе эрозии и деструкции. Материал рассасывающейся нити может включать в себя полимеры, такие как полигликолиевая кислота, сополимеры гликолида и лактида, сополимеры триметиленкарбоната и гликолида с диэтиленгликолем (например, MAXONTM, Tyco Healthcare Group), триполимер, состоящий из гликолида, триметиленкарбоната и диоксанона (например, BIOSYNTM [гликолид (60%), триметиленкарбонат (26%) и диоксанон (14%)], Tyco Healthcare Group), сополимеры гликолида, капролактона, триметиленкарбоната и лактида (например, CAPROSYNTM, Tyco Healthcare Group). Растворимая нить также может включать в себя частично деацетилированный поливиниловый спирт. Полимеры, которые могут использоваться в рассасывающихся нитях, могут представлять собой линейные полимеры, разветвленные полимеры или многоосные полимеры. Примеры многоосных полимеров для использования в нитях описаны в заявках на патент США № 2002/0161168, 2004/0024169 и 2004/0116620. Изготовленные из рассасывающегося шовного материала нити по мере разложения материала теряют прочность на разрыв. Рассасывающиеся нити могут быть как плетеными мультифиламентными, так и монофиламентными.
[0053] Термин «нерассасывающаяся нить» (также обозначаемый как «неабсорбирующая нить») относится к нити, содержащей материал, не подверженный разложению путем разрыва цепи, например, в ходе химической реакции (например, гидролиз, окислительно-восстановительные, ферментативные реакции или их комбинация) или в ходе термического или фотолитического процесса. Нерассасывающиеся шовные материалы включают в себя полиамид (также известный как нейлон, такой как нейлон 6 и нейлон 6,6), полиэфир (например, полиэтилентерефталат), политетрафторэтилен (например, расширенный политетрафторэтилен), полиэфир-эфир, такой как полибутестер (блок-сополимер бутилентерефталата и политетраметиленэфиргликоля), полиуретан, металлические сплавы, металл (например, проволока из нержавеющей стали), полипропилен, полиэтилен, шелк и хлопок. Изготовленные из нерассасывающегося шовного материала нити можно использовать в тех случаях, когда нить будет постоянно оставаться на своем месте или будет физически удалена из организма.
[0054] Термин «диаметр нити» относится к диаметру тела нити. Следует понимать, что среди описанных в настоящем документе нитей в некоторых вариантах осуществления используются нити различной длины, и хотя термин «диаметр» часто ассоциируется с сечением круглой формы, следует понимать, что в рамках настоящего документа данный термин используется для обозначения размера в сечении любой формы. Обозначения размера нити основаны на ее диаметре. Размеры нити согласно Фармакопее Соединенных Штатов Америки («USP») обозначаются от 0 до 7 в крупном диапазоне и от 1-0 до 11-0 в малом диапазоне; в малом диапазоне чем больше значение, предшествующее отделенному дефисом нулю, тем меньше диаметр нити. Фактический диаметр нити зависит от материала нити, так, например, изготовленная из коллагена нить размером 5-0, будет иметь диаметр 0,15 мм, тогда как нити с тем же размером согласно USP, но изготовленные из синтетического рассасывающегося материала или нерассасывающегося материала, будут иметь диаметр 0,1 мм. Выбор размера нити для конкретной цели зависит от таких факторов, как природа сшиваемой ткани и важность косметических соображений; хотя в условиях труднодоступного операционного поля в некоторых вариантах осуществления легче использовать нити малого диаметра, которые помимо прочего сокращают рубцевание, а сила натяжения изготовленной из некоторого материала нити с уменьшением ее размера также уменьшается. Следует понимать, что описанные в настоящем документе нити и способы производства нитей охватывают различные диаметры, включая без ограничений 7, 6, 5, 4, 3, 2, 1, 0, 1-0, 2-0, 3-0, 4-0, 5-0, 6-0, 7-0, 8-0, 9-0, 10-0 и 11-0.
[0055] Термин «прикрепление иглы» относится к закреплению на нити иглы, необходимой для наложения шва на ткань, и может включать в себя такие способы, как обжатие, горячая штамповка, использование клеевых соединений и т.п. Лигатуру прикрепляют к хирургической игле такими способами, как обжатие, горячая штамповка, использование клеевых соединений. Способы прикрепления нитей к хирургическим иглам описаны в патентах США №№ 3981307, 5084063, 5102418, 5123911, 5500991, 5722991, 6012216 и 6163948, а также в заявке на патент США № US 2004/0088003. Место прикрепления нити к игле называется штампом.
[0056] Термин «хирургическая игла» относится к иглам, используемым для наложения швов на ткань, которые могут иметь различную форму, внешний вид и состав. Существует два основных вида игл: травматические иглы и атравматические иглы. Травматические иглы имеют каналы или просверленные концы (т.е. отверстие или ушко) и поставляются отдельно от лигатуры, которую вдевают в иглу на месте. У атравматических игл нет ушка, их прикрепляют к нити на заводе путем горячей штамповки или другими способами, при этом шовный материал вставляют в канал на тупом конце иглы, который потом деформируют до конечной формы для удержания нити и иглы вместе. Таким образом, атравматические иглы не требуют дополнительного времени для вдевания нити на месте, а конец нити в месте прикрепления обычно имеет меньший размер, чем тело иглы. В травматической игле нить выходит с обеих сторон ушка иглы, и часто нить в определенной степени разрывает ткани при наложении шва. Большинство современных нитей представляют собой атравматические иглы с нитью для непрерывного шва. В некоторых вариантах осуществления атравматические иглы неразъемно опрессованы с нитью или, в некоторых вариантах осуществления, выполнены с возможностью высвободить нить резким быстрым рывком. Такие «отрывания» часто используют для узловых швов, когда каждой нитью делают только один стежок и затем завязывают нить. Для накладываемых без узлов нитей с зазубринами данные атравматические иглы являются предпочтительными.
[0057] Хирургические иглы также можно классифицировать в соответствии с геометрией конца или острия иглы. Например, в некоторых вариантах осуществления иглы являются (i) «коническими», когда тело иглы имеет круглую форму, плавно сходящую на конус к острию; (ii) «режущими», когда тело иглы имеет треугольную форму и заостренный режущий край на внутренней стороне; (iii) «обратнорежущими», когда режущий край находится на внешней стороне; (iv) «троакарными» или «конусными режущими», когда тело иглы имеет круглую форму и сходит на конус, но концы имеют маленькое режущее острие треугольной формы; (v) «притупленными» для зашивания хрупких тканей; (vi) иглами «с боковым режущим краем» или «иглами-шпателями», когда игла имеет плоскую форму сверху и снизу с режущим краем вдоль передней части к одной стороне (данные иглы, как правило, используют в хирургии глаза).
[0058] Хирургические иглы также могут иметь различную форму, включая (i) прямую, (ii) полуизогнутую или лыжеобразную, (iii) 1/4 круга, (iv) 3/8 круга, (v) 1/2 круга, (vi) 5/8 круга, (v) и со сложной кривизной.
[0059] Хирургические иглы описаны, например, в патентах США №№ 6322581 и 6214030 (Mani, Inc., Япония); и 5464422 (W.L. Gore, г. Ньюарк, штат Делавэр); и 5941899; 5425746; 5306288 и 5156615 (US Surgical Corp., г. Норуолк, штат Коннектикут); и 5312422 (Linvatec Corp., г. Ларго, штат Флорида); и 7063716 (Tyco Healthcare, г. Норт Хейвен, штат Коннектикут). Другие хирургические иглы описаны, например, в патентах США №№ 6129741; 5897572; 5676675; и 5693072. Описанные в настоящем документе нити в некоторых вариантах осуществления используют вместе с различными типами игл (включая без ограничений изогнутые, прямые, длинные, короткие, микроиглы и т.п.), режущими поверхностями игл (включая без ограничений режущие, конические и т.п.) и способами закрепления иглы (включая без ограничений просверленный конец, обжатие и т.п.). Более того, описанные в настоящем документе нити могут сами иметь достаточно жесткие и острые концы и вовсе не требовать иглы для наложения шва.
[0060] Термин «диаметр иглы» относится к диаметру иглы для наложения шва в самой широкой части данной иглы. Хотя термин «диаметр» часто ассоциируется с сечением круглой формы, следует понимать, что в рамках настоящего документа данный термин можно использовать для обозначения размера поперечного сечения любой формы.
[0061] Термин «готовая к использованию нить» относится к нити, имеющей хирургическую иглу на по меньшей мере одном конце для введения в ткань. Термин «конец нити для введения в ткань» относится к концу нити, вводимому в ткань при наложении шва; в некоторых вариантах осуществления концом нити для введения в ткань являются один или оба конца нити. В некоторых вариантах осуществления конец нити для введения в ткань прикреплен к устройству для наложения шва, таким как хирургическая игла, или, в некоторых вариантах осуществления, он является достаточно острым и жестким для прокалывания ткани без использования дополнительных устройств.
[0062] Термин «закрытие раны» относится к хирургической процедуре закрытия раны. Раной называется травма, особенно такая, при которой происходит порез, разрыв, прокол или иное повреждение кожи или другой внешней или внутренней поверхности. Обычно рана возникает при нарушении целостности какой-либо ткани (например, разрыв или ожог кожи, разрыв мышцы или переломы кости). В некоторых вариантах осуществления рана вызвана таким действием, как прокол, падение или хирургическая операция; инфекционным заболеванием; или имеющимся у пациента медицинским состоянием. Хирургическое закрытие раны способствует биологическому процессу заживления благодаря соединению или плотному сближению краев данных ран в месте разрыва, пореза или иного разделения ткани. Хирургическое закрытие раны обеспечивает непосредственное смыкание или сближение слоев ткани, что снижает объем формирования новой ткани, необходимой для ликвидации разрыва между двумя краями раны. Закрытие может одновременно выполнять как функциональные, так и эстетические задачи. Данные задачи включают в себя устранение мертвого пространства путем сближения подкожных тканей, сведение к минимуму риска рубцевания путем тщательного совмещения эпидермиса и предотвращение формирования атрофического рубца путем точной эверсии краев раны.
[0063] Термин «процедура подъема ткани» относится к хирургической процедуре репозиции ткани с нижних участков на более высокие участки (например, перемещение ткани в направлении, противоположном направлению силы тяжести). Поддерживающие связки лица поддерживают мягкие ткани лица в нормальном анатомическом положении. Однако с возрастом гравитационное воздействие и потеря объема ткани вызывают миграцию ткани вниз, и жировые отложения спускаются в пространство между поверхностной и глубокой оболочкой лица, вызывая таким образом провисание ткани лица. Процедуры подтягивания кожи лица служат для поднятия данных обвисших тканей и представляют собой один из примеров более общего класса медицинских процедур, известных как процедура подъема ткани. В более широком смысле, процедура подъема ткани обращает изменения внешности, возникающие со временем в результате старения или действия силы тяжести, и другие вызывающие обвисание ткани эффекты времени, такие как генетические факторы. Следует отметить, что ткань также может быть репозиционирована без подъема; при выполнении некоторых процедур ткани могут быть репозиционированы латерально (в направлении от средней линии), медиально (в направлении к средней линии) или вниз (в нижнем направлении) для восстановления симметрии (т.е. репозиционированы таким образом, чтобы левая и правая стороны тела «соответствовали друг другу»).
[0064] Термины «медицинское устройство» или «имплантат» относятся к любому предмету, помещенному в организм для восстановления физиологической функции, уменьшения (устранения) симптомов, связанных с заболеванием, и/или восстановления, и/или замены поврежденных или пораженных органов и тканей. Хотя обычно они состоят из биологически совместимых синтетических материалов (таких как медицинская нержавеющая сталь, титан и другие металлы или полимеры, такие как полиуретан, силикон, PLA, PLGA и другие материалы), являющиеся экзогенными, некоторые медицинские устройства и имплантаты включают в себя материалы животного происхождения (например, «ксенотрансплантаты», такие как целые органы животного; животные ткани, такие как клапаны сердца; молекулы природного происхождения или химически модифицированные молекулы, такие как коллаген, гиалуроновая кислота, белки, карбогидраты и т.п.), материалы от человеческих доноров (например, «аллотрансплантаты», такие как целые органы; ткани, такие как костные трансплантаты, кожные трансплантаты и т.п.) или собственные трансплантаты пациента (например, «аутотрансплантаты», такие как сафенные венозные трансплантаты, кожные трансплантаты, трансплантаты сухожилий, связок, мышц). Медицинские устройства, которые можно использовать при выполнении процедур, связанных с настоящим изобретением, без ограничений включают в себя ортопедические имплантаты (искусственные суставы, связки и сухожилия; болты, пластины и другие вживляемые конструкции), зубные имплантаты, внутрисосудистые имплантаты (артериальные и венозные обходные сосудистые шунты, имплантаты, обеспечивающие доступ для гемодиализа; как аутологические, так и синтетические), кожные трансплантаты (аутологические, синтетические), трубки, дренажи, имплантируемые агенты-наполнители, насосы, шунты, уплотнители, хирургические сетки (например, сетки, применяемые для герниопластики, каркасы для ткани), средства лечения фистулы, позвоночные имплантаты (например, искусственные межпозвоночные диски, устройства для артродеза позвонков и т.п.) и т.п.
ДОСТАВКА НИТИ ДЛЯ МАЛОИНВАЗИВНОЙ ХИРУРГИИ
[0065] Как уже отмечалось, настоящее изобретение относится к композициям, конфигурациям, способам изготовления и способам применения самоудерживающихся нитей. Настоящее изобретение преодолевает проблемы и недостатки предшествующего уровня техники путем доставки самоудерживающихся нитей к месту операции. Для выполнения манипуляций с самоудерживающимися нитями в операционном поле можно применять эндоскопические и/или роботизированные хирургические инструменты для сшивания, сближения и удерживания ткани. Для доставки хирургических элементов и вспомогательных устройств для использования в операциях МИХ предложен ряд устройств. Такие устройства раскрыты, например, в патенте США № 6986780 «Система и способ доставки хирургических элементов», выданном Rudnick et al., и патенте США № 7125403 «Вспомогательные устройства in vivo для малоинвазивной роботохирургии», выданном Julian et al., содержание которых полностью включено в настоящий документ путем ссылки.
Эндоскопическая система доставки нити
[0066] В некоторых вариантах осуществления самоудерживающаяся нить является однонаправленной, так что один или более фиксаторов ориентированы в одном направлении вдоль длины лигатуры; или двунаправленной, как правило, с одним или более фиксаторами, ориентированными в одном направлении вдоль одной части лигатуры, за которыми следуют один или более фиксаторов, ориентированных в другом (часто противоположном) направлении вдоль другой части лигатуры (как описано на примере фиксаторов в форме зазубрин в патентах США №№ 5931855 и 6241747). Хотя существует множество непрерывных или прерывистых конфигураций фиксаторов, стандартная форма двунаправленной самоудерживающейся нити включает в себя иглу на одном конце лигатуры с зазубринами, кончики которых выходят в направлении от иглы вплоть до переходной точки (зачастую, середины) нити; в переходной точке конфигурация зазубрин меняется приблизительно на 180° (т.е. зазубрины обращены в противоположном направлении) вдоль оставшейся длины лигатуры вплоть до ее прикрепления ко второй игле на противоположном конце (таким образом, что зазубрины на данной части нити также имеют кончики, выходящие в направлении от ближайшей иглы). Термин «выходящий в направлении от» иглы означает, что кончик зазубрины отстоит от иглы, и, в некоторых вариантах осуществления, содержащую зазубрину часть нити легче протянуть через ткань в направлении иглы, чем в противоположном направлении. Другими словами, зазубрины на обеих «половинах» обычной двунаправленной самоудерживающейся нити имеют кончики, которые направлены к середине, между ними расположен переходный сегмент (в котором зазубрины отсутствуют), а к одному из концов нити прикреплена игла.
[0067] На ФИГ. 1A показана система самоудерживающейся нити 100. Система самоудерживающейся нити 100 содержит иглы 110, 112, прикрепленные к самоудерживающейся лигатуре 102. Самоудерживающаяся лигатура 102 включает в себя множество фиксаторов 130, распределенных на поверхности волокна 120. Во входной части 140 волокна 120 фиксаторы 130 отсутствуют. На участке 142 волокна 120 находится множество фиксаторов 130, расположенных таким образом, что нить может входить в направлении иглы 110, но сопротивляется перемещению в направлении иглы 112. На переходном участке 144 фиксаторы 130 отсутствуют. В некоторых вариантах осуществления переходный участок 122 снабжен маркером для облегчения определения местоположения переходного участка. Переходный участок 122, как показано, имеет видимую полоску 122 для облегчения идентификации переходного участка. В некоторых вариантах осуществления также предусмотрены маркеры на участках 142, 146 и/или иглах 110, 112 для облегчения идентификации местоположения и ориентации фиксаторов конкретной части системы самоудерживающейся нити 100. На участке 146 находится множество фиксаторов 130, расположенных таким образом, что нить может входить в направлении иглы 112, но сопротивляется перемещению в направлении иглы 110. Фиксаторы 130 на участке 146 больше по размеру, чем фиксаторы 130 на участке 142. Фиксаторы большего размера более эффективны для захвата более мягкой и/или менее плотной ткани, чем фиксаторы меньшего размера. Во входной части 148 волокна 120 фиксаторы 130 отсутствуют.
[0068] На каждом из участков 140, 142, 144, 146 и 148 имеется разрыв, показывающий, что в некоторых вариантах осуществления длина каждого участка варьируется и выбирается в зависимости от конкретного случая применения нити. Например, при необходимости переходный участок 144 может быть асимметрично расположен ближе к игле 110 или игле 112. В некоторых вариантах осуществления самоудерживающейся нити с асимметрично расположенным переходным участком 144 отдают предпочтение врачи, использующие ведущую руку в техниках, требующих наложения шва в противоположных направлениях вдоль раны. Врач может начать шов дальше от одного конца раны, чем от другого, и прошить более длинную часть раны при помощи иглы, расположенной дальше от переходного участка 144. Это позволяет врачу пользоваться ведущей рукой для сшивания большей части раны при помощи более длинного отрезка нити. Более длинный отрезок нити - это участок нити между переходным участком и иглой, расположенной дальше от переходного участка.
[0069] На ФИГ. 1B представлено увеличенное изображение самоудерживающейся лигатуры 102 на участке 142. Как показано на ФИГ. 1B, по поверхности волокна 120 распределено множество фиксаторов 130. Закрепление самоудерживающихся нитей после наложения шва на ткань включает проникновение кончиков фиксаторов 132 в окружающую ткань, в результате чего ткань захватывается между фиксатором 130 и телом шовного волокна 120. Внутренняя поверхность 134 фиксатора 130, которая контактирует с тканью, захватываемой между фиксатором 130 и телом волокна 120, далее обозначается как «поверхность зацепления ткани» или «внутренняя поверхность фиксатора». Как показано на ФИГ. 1B, каждый фиксатор 130 имеет кончик 132 и поверхность тканевого фиксатора 134. При перемещении самоудерживающейся лигатуры 102 в направлении стрелки 136 фиксаторы 130 прилегают к телу волокна 120. Однако при перемещении самоудерживающейся лигатуры 102 в направлении стрелки 138 кончик 132 фиксатора 130 зацепляют ткань, окружающую волокно 120, и заставляют фиксатор 130 отойти от волокна 120 и зацепиться за ткань поверхностью зацепления ткани 134, тем самым препятствуя перемещению нити в данном направлении.
[0070] В альтернативных вариантах осуществления самоудерживающаяся нить может быть снабжена тампоном. На ФИГ. 1H изображен тампон 124, расположенный в переходной зоне 144 системы самоудерживающейся нити 100. В некоторых вариантах осуществления на тампоне 124 может быть расположен маркер/код 128 для идентификации нити и/или ее свойств. Тампон 124 имеет одно или более отверстий 126, через которые может проходить лигатура 120, как показано на фигуре. В альтернативном варианте осуществления тампон может быть химически и/или механически прикреплен к лигатуре 120, например, путем сварки, клипирования, приклеивания или спекания. Некоторые примеры использования тампона 126 включают локализацию переходной зоны, обеспечивая упор, так что тампон может быть протянут сквозь ткань только до того момента, пока тампон не входит в контакт с тканью, и/или обеспечение поддержки ткани и органов. Тампон 126 может иметь любую форму, в том числе форму расширенного участка для поддержки ткани.
[0071] Способность самоудерживающихся нитей закреплять и удерживать ткани на месте даже при отсутствии натяжения, оказываемого на нить узлом, также представляет собой свойство, обеспечивающее им превосходство над гладкими нитями. При закрытии раны, находящейся под натяжением, данное преимущество выражается в следующем: (i) самоудерживающиеся нити имеют множество фиксаторов, способных равномерно распределять натяжение по всей длине нити (путем создания сотен точек «фиксации», что позволяет получить лучший косметический результат и снижает риск «проскальзывания» или прохождения нити наружу) в противоположность нитям, используемым для наложения узловых швов, при использовании которых натяжение концентрируется в отдельных точках; (ii) обеспечивается возможность равномерного закрытия ран со сложной геометрией (круглые, дугообразные, рваные раны) с большей точностью и аккуратностью, чем при наложении узлового шва; (iii) самоудерживающиеся нити устраняют потребность в «третьей руке», часто необходимой для поддержания натяжения краев сшиваемой раны в процессе наложения традиционного шва и затягивания узлов (во избежание «проскальзывания», если во время затягивания узла натяжение на мгновение ослабевает); (iv) самоудерживающиеся нити незаменимы при выполнении процедур, в которых затягивание узлов технически осложнено, таких как сшивание глубоких ран или при выполнении лапароскопических (эндоскопических) процедур; и (v) самоудерживающиеся нити можно использовать для сближения краев и удержания раны перед окончательным закрытием. В результате самоудерживающиеся нити оказываются более простыми при использовании в ограниченных и глубоких анатомических структурах (таких как почечная лоханка, брюшная полость и грудная клетка), а также облегчают сближение тканей в ходе лапароскопических (эндоскопических) и малоинвазивных процедур; при этом нет необходимости фиксировать закрытие раны при помощи узла. Повышенная точность позволяет использовать самоудерживающиеся нити для более сложных закрытий (таких, как раны с несоответствием диаметров, более крупные дефекты или раны, требующие наложения кисетного шва), которые невозможно выполнить с использованием гладких нитей. Улучшенные качества самоудерживающейся нити особенно востребованы в эндоскопических и телехирургических операциях. Самоудерживающаяся нить позволяет преодолеть ограничения функциональной подвижности и чувствительности существующих эндоскопических и телехирургических инструментов.
[0072] На ФИГ. 1C показан эндоскопический инструмент для доставки нити 150, используемый для доставки системы самоудерживающейся нити 100 к месту операции в организме пациента. Инструмент для доставки нити 150 включает в себя, на проксимальном конце, рукоятку 152, соединенную удлиненным трубчатым элементом 154 с катушкой 156. Рукоятка 152 позволяет позиционировать и управлять инструментом для доставки нити 150 с внешней стороны тела пациента. Рукоятка 152 может включать в себя один или более приводов 158, которые, в некоторых вариантах осуществления, перемещаются относительно друг друга и/или рукоятки 152, приводя в действие исполнительное устройство, такое как хирургические ножницы, катушка для доставки нити и т.п., расположенное на инструменте для доставки нити.
[0073] Удлиненный трубчатый элемент соединяет рукоятку 152 (проксимальный конец) с катушкой 156 (дистальный конец). Удлиненный трубчатый элемент 154 представляет собой жесткий элемент, размер которого позволяет вводить его через отверстие доступа в организм пациента. Трубчатый элемент 154 предпочтительно имеет диаметр приблизительно или менее чем 12 мм, 8 мм и 5 мм. Удлиненный трубчатый элемент 154 должен иметь достаточную длину, чтобы достичь требуемого операционного поля через отверстие доступа. Например, в лапароскопических инструментах удлиненный трубчатый элемент 154 имеет длину от 180 мм до 450 мм, обычно 360 мм в длину для взрослых пациентов и 280 мм в длину для детской хирургии. Отверстие доступа обычно имеет диаметр 12 мм или менее. Диаметр отверстия доступа предпочтительно составляет 10 мм или менее. В некоторых случаях отверстие доступа, в некоторых вариантах осуществления, имеет диаметр 8 мм или 5 мм или меньше. В общем, отверстия доступа малого размера являются предпочтительными для снижения степени травмирования пациента, однако отверстия должны быть достаточно большими, чтобы обеспечить введение инструментов, позволяющих выполнять необходимые хирургические манипуляции. Диаметр удлиненного трубчатого элемента 154 и катушки 156 должен быть меньше внутреннего диаметра отверстия доступа, чтобы, в некоторых вариантах осуществления, дистальную часть инструмента для доставки нити можно было ввести через отверстие доступа.
[0074] На ФИГ. 1D показан картридж 170, включающий в себя катушку 156 и соединительный элемент 172. Соединительный элемент 172 обеспечивает прикрепление с возможностью отсоединения картриджа 170 к дистальному концу удлиненного трубчатого элемента 154. В некоторых вариантах осуществления присоединением и отсоединением картриджа 170 управляет привод 158. В некоторых вариантах осуществления для проведения операций поставляется ряд стерильных картриджей 170, каждый из которых поддерживает различные самоудерживающиеся нити. Таким образом, в ходе операции инструмент для доставки нити 150 может использоваться хирургом или ассистентом для выбора и доставки множества систем самоудерживающейся нити 100. В альтернативных вариантах осуществления катушка 156, в некоторых вариантах осуществления, неразъемным образом установлена на конце инструмента для доставки нити 150. Как показано на ФИГ. 1D, катушка 156 также может включать в себя один или более гнезд 157 под иглы 110, 112 системы самоудерживающейся нити 100. Иглы 110, 112 установлены в гнезда для игл 157 с возможностью удаления. Для введения самоудерживающейся лигатуры 102 иглы 110, 112 вынимают из гнезда для игл 157. В некоторых вариантах осуществления иглы 110, 112 возвращаются обратно в гнезда для игл 157, чтобы обеспечить удаление игл 110, 112 и излишков самоудерживающейся лигатуры 102 после наложения шва из самоудерживающейся лигатуры 102.
[0075] Как показано на ФИГ. 1D, картридж 170 включает в себя маркер 174. Как показано на ФИГ. 1D, маркер 174 представляет собой QR-код. QR-код представляет собой машиночитаемый матричный код или двухмерный штрих-код, позволяющий быстро декодировать его содержание. В частности, QR-коды можно быстро распознать и декодировать в изображениях, получаемых камерой. В некоторых вариантах осуществления QR-код непосредственно указывает свойства нити, а в других случаях указывает местоположение (URL или иное) данных, идентифицирующих свойства нити. Затем свойства нити отображаются вместе с изображением операционного поля, выводимым хирургу (см. ФИГ. 1G). Отображаемая информация позволяет хирургу удостовериться, что в картридж загружена требуемая нить. Хотя на ФИГ. 1D показан QR-код, потенциальные маркеры включают в себя без ограничений: маркеры, видимые в диапазоне частот видимого излучения; буквенно-цифровые маркеры, QR-коды, маркеры, невидимые невооруженным глазом, но визуализируемые в условиях хирургического использования; маркеры, распознаваемые в диапазоне невидимого излучения; маркеры, обнаруживаемые ультразвуком; маркеры, допускающие машинное считывание; маркеры, допускающие восприятие человеком; маркеры, считываемые, в некоторых вариантах осуществления, удаленно; маркеры, являющиеся активными маркерами (включая радиометки); и маркеры, являющиеся пассивными маркерами (включая пассивные радиометки). Свойства нити, которые могут быть связаны с маркером, без ограничений включают в себя следующие характеристики: длина, диаметр, материал, иглы, наличие фиксаторов, отсутствие фиксаторов, источник/торговая марка и/или другие фиксированные свойства. В дополнение к фиксированным или статическим свойствам маркер может служить для идентификации динамических свойств. Например, перемещение картриджа и/или нити под воздействием усилия, прикладываемого к картриджу, может вызвать перемещение маркера, и такое перемещение может быть зарегистрировано системой дистанционной хирургии с целью отслеживания изменений местоположения картриджа и нити. Такое перемещение может представлять собой поступательное перемещение или угловое перемещение. Путем отслеживания углового перемещения катушки можно, например, отследить количество снятой с катушки нити. Дополнительно размещенные на нити метки можно использовать для идентификации изменения местоположения нити, а также, например, натяжения нити. Метки также можно использовать с управляемой голосовыми командами системой дистанционной хирургии. Хирург называет тип требуемого нити, и система дистанционной хирургии загружает картридж на рабочий конец инструмента, установленного на манипуляторе системы дистанционной хирургии, для введения в пациента.
[0076] Катушка 156 установлена на дистальном конце удлиненного трубчатого элемента 154 и имеет размер, позволяющий ей проходить через отверстие доступа в организм пациента. Катушка 156 поддерживает систему самоудерживающейся нити 100, позволяя доставить систему самоудерживающейся нити 100 через отверстие доступа к месту операции в организме пациента. На ФИГ. 1E показана дистальная часть инструмента для доставки нити 150, введенного через отверстие доступа 160 в организм пациента 162. Инструмент для доставки нити 150 вводят через канюлю 164 в отверстии доступа 160. В некоторых вариантах осуществления инструмент для доставки нити 150 скользит вдоль канюли 164, как показано стрелкой 166. Инструмент для доставки нити 150 и канюля 164 могут также шарнирно поворачиваться относительно отверстия доступа 160, как показано стрелками 168. Таким образом, инструмент для доставки нити 150 позволяет доставить катушку 156 к месту операции в организме пациента 162.
[0077] На ФИГ. 1F показана доставка системы самоудерживающейся нити 100 к месту операции в организме пациента. Как показано на ФИГ. 1F, эндоскоп 180 освещает операционное поле при помощи одного или более источников света 182. Эндоскоп 180 также обеспечивает получение изображения операционного поля посредством одного или более устройств получения изображения 184. Тем самым эндоскоп 180 освещает операционное поле. Пунктирной линией 186 обозначено поле обзора, которое, в некоторых вариантах осуществления, транслируется хирургу. Следует отметить, что инструмент для доставки нити 150 ввели так, чтобы установить катушку 156 картриджа 170 в пределах поля обзора. В поле обзора также находится концевое исполнительное устройство (ножницы, щипцы и т.п.) одного или более эндоскопических хирургических инструментов 190. Хирург может управлять эндоскопическими хирургическими инструментами 190, захватывая иглы 110, 112, поддерживаемые катушкой 156. Затем хирург, управляя эндоскопическими хирургическими инструментами 190, накладывает самоудерживающуюся лигатуру 102 на ткань 192. После наложения самоудерживающейся лигатуры 102 хирург, управляя эндоскопическими хирургическими инструментами 190, возвращает иглу 110, 112 в катушку 156 и обрезает неиспользованную самоудерживающуюся лигатуру 102. После этого инструмент для доставки нити 150 можно удалить из операционного поля, тем самым извлекая иглы и остатки самоудерживающейся лигатуры 102 из организма пациента.
[0078] На ФИГ. 1G показан пример изображения 194 операционного поля с ФИГ. 1F на дисплее 196 в том виде, в котором его получает хирург. Пунктирной линией 186 показано поле обзора, обеспечиваемое эндоскопом (на фигуре не показано). Следует отметить, что инструмент для доставки нити 150 ввели так, чтобы установить катушку 156 картриджа 170 в поле обзора 186. На изображении виден маркер 174 картриджа 170. Связанная с дисплеем 196 компьютерная система идентифицирует и дешифрует маркер 174. Как показано на ФИГ. 1G, информация о свойствах нити 176, связанная с маркером 174, отображается в передаваемом хирургу изображении 194. Отображаемая информация позволяет хирургу удостовериться, что в картридж загружена требуемая нить. Отображаемая информация может быть статической или динамической. Например, идентифицировав нить, система отображения может также отобразить другую информацию о свойствах нити 176, имеющую отношение к нити. Например, на дисплей может выводиться измеренное эндоскопическими инструментами или иным способом натяжение нити в виде доли максимального натяжения идентифицированной нити.
Роботизированная система доставки нити
[0079] Как отмечалось ранее, малоинвазивные системы дистанционной хирургии были разработаны для повышения функциональной подвижности хирурга во время работы на внутреннем операционном поле, а также для обеспечения возможности для хирурга оперировать пациента дистанционно. В системе дистанционной хирургии хирург получает изображение операционного поля на пульте управления. Наблюдая изображение операционного поля на соответствующем дисплее, хирург выполняет хирургические операции на пациенте, управляя устройствами ввода на пульте управления. Устройства ввода управляют роботизированным манипулятором, который размещает и выполняет манипуляции с хирургическим инструментом. Во время хирургической операции система дистанционной хирургии осуществляет механическое приведение в действие и управление различными хирургическими инструментами или инструментами с концевыми исполнительными устройствами, такими как, например, зажимы для ткани, прижигающее устройство, приводы игл или т.п., выполняющими различные функции вместо хирурга, например, удерживание иглы или управление ей, зажим кровеносного сосуда или рассечение ткани или т.п., в ответ на манипуляции, выполняемые с главными устройствами управления. Примером дистанционной МИХ-системы может служить хирургическая система DA VINCI® производства компании Intuitive Surgical, Inc.
[0080] При проведении дистанционной хирургической операции в некоторых вариантах осуществления нити, включая системы самоудерживающейся нити, могут быть доставлены к месту операции при помощи инструмента для доставки нити 150, описанного ранее со ссылкой на ФИГ. 1C-1G. Хирург может вручную управлять инструментом для доставки нити. Однако в этом случае потребуется, чтобы хирург оставил рабочую станцию. В альтернативном варианте осуществления инструментом для доставки нити 150 может вручную управлять ассистент хирурга. Однако в этом случае потребуется, чтобы ассистент вводил инструмент для доставки нити вручную без визуализации, обеспечиваемой рабочей станцией. В соответствии с другим вариантом осуществления настоящего изобретения инструмент для доставки нити оснащен средствами сопряжения с системой дистанционной хирургии. Инструмент для доставки нити используют для доставки самоудерживающейся нити к месту операции под управлением хирурга. Такой инструмент для доставки нити эффективно использует возможности системы дистанционной хирургии точно доставлять самоудерживающуюся нить к месту операции под управлением хирурга, осуществляемым с рабочей станции, и возможностями системы дистанционной хирургии визуализировать процесс. Более того, в некоторых вариантах осуществления отдельные этапы операции по доставке нити надежно автоматизированы с целью облегчения повторной доставки и извлечения нитей из области операционного поля после первоначальной установки под управлением хирурга. Хирург управляет инструментом для доставки нити при помощи одного или более устройств ввода с пульта управления, который может включать в себя, например, переключатель, клавиатуру, устройства позиционного управления и/или устройства речевого ввода.
[0081] На ФИГ. 2A показан инструмент для доставки нити 250, который можно использовать совместно с системой дистанционной хирургии. Инструмент для доставки нити 250 включает в себя, на проксимальном конце, корпус 252, соединенный стволом инструмента 254 с рабочим инструментом, включая катушку 256. Корпус 252 может быть установлен на устройстве сопряжения 246 руки манипулятора 240, обеспечивая позиционирование и управление инструментом для доставки нити 250 с внешней стороны тела пациента. Инструмент для доставки нити 250 включает в себя катушку 256, установленную на дистальном конце ствола инструмента 254. Катушка 256 поддерживает систему самоудерживающейся нити 100, обеспечивая таким образом доставку системы самоудерживающейся нити 100 через канюлю/направитель 264 к месту операции в организме пациента. Катушка 256 имеет размер, позволяющий ввести ее через канюлю/направитель 264 в организм пациента.
[0082] Ствол инструмента 254 соединяет корпус 252 (проксимальный конец) с катушкой 256 (дистальный конец). Ствол инструмента 254 представляет собой жесткий элемент, размер которого позволяет вводить его через отверстие доступа в организм пациента. В альтернативном варианте осуществления ствол инструмента может быть гибким. Ствол инструмента можно контролировать системой дистанционной хирургии, так что ствол инструмента может быть «проведен» в требуемое местоположение. Ствол инструмента 254 должен быть достаточно длинным, чтобы достичь требуемого операционного поля через отверстие доступа. Диаметр ствола инструмента 254 и катушки 256 должен быть достаточно малым, чтобы дистальную часть хирургического инструмента 250 можно было в некоторых вариантах осуществления ввести через направляющую канюли/отверстие доступа 264 в организм пациента. Ствол инструмента 254 может содержать одно или более механических сочленений для передачи движения от механизмов передачи 258 в корпусе к рабочему инструменту на дистальном конце ствола инструмента 254.
[0083] На ФИГ. 2A также показана часть руки манипулятора 240, на которой, в некоторых вариантах осуществления, установлен инструмент для доставки нити 250. В некоторых вариантах осуществления корпус 252 инструмента для доставки нити 250 (или другого инструмента) установлен на устройстве сопряжения 246 на руке манипулятора 240 с возможностью удаления. Корпус 252 включает в себя один или более зажимов 253, которые входят в зацепление с ответными элементами на устройстве сопряжения 246 для удержания корпуса 252 на устройстве сопряжения 246. Следует отметить, что устройство сопряжения 246 можно перемещать вверх и вниз по направляющей 247, перемещая таким образом инструмент в канюлю/направляющую инструмента 264 и из нее. Перемещение устройства сопряжения 246 вдоль направляющей 247 осуществляется посредством исполнительного устройства/привода. Направляющая 247 имеет достаточно большую длину, таким образом, при перемещении устройства сопряжения 246 к проксимальному концу направляющей (конец, наиболее удаленный от пациента) установленный на устройстве сопряжения инструмент для доставки нити 250 полностью вытягивается из канюли/направляющей инструмента 264. Так, в некоторых вариантах осуществления инструмент для доставки нити 250 защелкивается на устройстве сопряжения 246 или снимается с него, когда устройство сопряжения 246 находится на проксимальном конце направляющей. Инструмент для доставки нити 250 после этого может быть введен через отверстие доступа 264 при помощи исполнительного устройства/привода, продвигающего устройство сопряжения 246 вдоль направляющей 247 в направлении отверстия доступа 264.
[0084] Как показано на ФИГ. 2A, корпус 252 инструмента для доставки нити 250 может включать в себя одно или более передаточных устройств 258 для управления перемещением/работой частей инструмента для доставки нити 250. Устройство сопряжения 246 включает в себя множество активных передаточных механизмов 248, которые входят в зацепление с множеством передаточных механизмов 258 в корпусе 252, если корпус 252 установлен на устройстве сопряжения 246. Это позволяет использовать активные передаточные механизмы 248 устройства сопряжения для вращения ствола инструмента 254 и/или катушки 256 и/или управления другими механическими операциями инструмента для доставки нити. Например, в некоторых вариантах осуществления инструмент для доставки нити 250 включает в себя на дистальном конце зажим для захвата игл для их удаления из организма пациента или ножницы для обрезания нити во время процедуры; в некоторых вариантах осуществления, зажим или режущий инструмент могут быть приведены в движение активными передаточными механизмами 248 через входящие с ними в зацепление передаточные механизмы 258 корпуса 252.
[0085] На ФИГ. 2B и 2C показан инструмент для доставки нити 250, установленный на руке манипулятора 240. Корпус 252 удерживается на устройстве сопряжения 246 при помощи одного или более зажимов 253 (на фигуре не показаны). Когда корпус 252 установлен на устройстве сопряжения 248, оператору доступны один или более рычагов сброса 257, позволяющих при необходимости раскрыть зажимы 253 (на фигуре не показаны). В некоторых вариантах осуществления катушка 256 прикреплена с возможностью отсоединения к инструменту для доставки нити 250 или может представлять собой часть картриджа, который, в некоторых вариантах осуществления, присоединен к инструменту для доставки нити 250 с возможностью отсоединения. В некоторых вариантах осуществления катушка прикреплена с возможностью или без возможности отсоединения к инструменту для доставки нити 250 в фиксированном местоположении. Катушка 256 установлена (в этом примере) на дистальном конце инструмента для доставки нити 250. Для введения катушки 256 в область операционного поля в организме объекта устройство сопряжения 246 сначала перемещается к проксимальному концу направляющей 247 (наиболее удаленный от пациента конец). После этого корпус 248 инструмента для доставки нити 250, несущий катушку 256, устанавливают на устройство сопряжения 246 руки манипулятора 240, как показано на ФИГ. 2B. Затем устройство сопряжения 246 продвигают линейно в направлении к пациенту по направляющей 247. Перемещение устройства сопряжения 246 по направляющей 247 заставляет катушку 256 и самоудерживающуюся нить 100 продвигаться через канюлю/направляющую инструмента 264 внутрь организма пациента, как показано на ФИГ. 2C. Затем самоудерживающуюся нить 100 можно разместить в операционном поле внутри организма пациента при помощи руки манипулятора 240.
[0086] После размещения катушки 256 в операционном поле самоудерживающаяся нить 100 размещается так, чтобы ее можно было снять с катушки 256 при помощи другого инструмента. В некоторых вариантах осуществления иглы и излишки нити возвращают на катушку после наложения нити. Инструмент для доставки нити 250 и катушку 256 (и необязательно иглы и излишки нити) извлекают из организма, вытягивая устройство сопряжения 246 к проксимальному концу направляющей 247 (наиболее удаленный от пациента конец), как показано на ФИГ. 2B. При необходимости использования другой нити инструмент для доставки нити 250 заменяют другим инструментом для доставки нити или снимают содержащий катушку 256 картридж и заменяют его новым картриджем с новой катушкой 256.
[0087] На ФИГ. 2D представлен вид руки манипулятора 240 с дистальной частью инструмента для доставки нити 250, введенного через разрез 260 в организм пациента 262. Инструмент для доставки нити 250 вводят через канюлю 264, вставленную в разрез 260. Канюля 264 соединена с рукой манипулятора 240. Инструмент для доставки нити 250 установлен с возможностью удаления на устройстве сопряжения 246 на руке манипулятора 240. Рука манипулятора 240 может позиционировать инструмент для доставки нити 250 и катушку 256 в трех измерениях и поворачивать инструмент для доставки нити 250 вокруг оси введения, ограничивая при этом движение (препятствуя боковому смещению) в разрезе 260. Инструмент для доставки нити 250 скользит по канюле 264, как показано стрелкой 266. Инструмент для доставки нити 250 и канюля 264 выполнены с возможностью шарнирного поворота вокруг разреза 260, как показано стрелками 268, 269. Перемещения инструмента для доставки нити в трех или более измерениях в организме пациента 262, таким образом, осуществляются под управлением руки манипулятора 240, что позволяет доставить катушку 256 и нить 100 в требуемое положение в пределах места операции и/или в пределах поля обзора хирурга.
[0088] На ФИГ. 2E и 2F показан пример системы дистанционной хирургии 200, включающей в себя множество рук манипулятора 240, одну из которых можно использовать для позиционирования инструмента для доставки нити 20 в организме пациента. На ФИГ. 2E представлен вид в перспективе системы дистанционной хирургии, тогда как на ФИГ. 2F представлена функциональная блок-схема системы дистанционной хирургии 200. Как показано на ФИГ. 2E, 2F, система дистанционной хирургии 200 содержит систему манипуляции над пациентом 204 и пульт управления хирурга 201. Система манипуляции над пациентом 204 включает в себя множество рук манипулятора 240, установленных на регулируемой подставке 242. Руки манипулятора 240 содержат множество механических сочленений и множество исполнительных устройств/приводов. В некоторых вариантах осуществления исполнительные устройства/приводы представляют собой электродвигатели, например, шаговые электродвигатели и/или серводвигатели. В альтернативных вариантах осуществления приводы являются пневматическими, гидравлическими, магнитными или другими исполнительными устройствами, позволяющими перемещать сочленения в ответ на сигналы управления. Положение сочленений отслеживается при помощи множества датчиков 270; например, линейных или угловых оптических энкодеров. Сочленения выполнены с возможностью независимого перемещения от множества приводов 272; например, шаговых электродвигателей и приводов с эффектом запоминания формы. В некоторых случаях приводы 272 могут также представлять собой датчики 270; например, шаговые электродвигатели одновременно могут выполнять функцию привода, датчика положения и датчика усилия.
[0089] Эндоскоп, инструмент для доставки нити и один или более хирургических инструментов соединены с руками манипулятора 240. Количество используемых манипуляторов над пациентом и инструментов зависит от выполняемой процедуры. В некоторых вариантах осуществления система манипуляции над пациентом 240 включает в себя две механические руки манипулятора 240, служащие для управления хирургическими инструментами, и одну руку манипулятора 240, обеспечивающую позиционирование эндоскопа. В этом варианте осуществления инструмент для доставки нити позиционируется и управляется одной из двух рук манипулятора 240 для управления хирургическими инструментами. В некоторых случаях нить вводят при помощи инструмента для доставки нити 250, а затем инструмент для доставки нити заменяют другим хирургическим инструментом, таким как иглодержатель или зажим. В некоторых системах предусмотрена четвертая рука. В таких системах инструмент для доставки нити позиционируют и управляют им при помощи четвертой руки манипулятора. Хирург может переключаться между управлением хирургическими инструментами и управлением инструментом для доставки нити без необходимости заменять инструмент для доставки нити на хирургический инструмент.
[0090] Пульт управления хирурга 201 содержит систему отображения 212, систему управления 214 и систему обработки данных 218. Система отображения 212 включает в себя 2D- или 3D-монитор 213 и одну или более из перечисленных систем: система звукового вывода, система обратной связи по усилию, монитор с сенсорным экраном и другие элементы отображения, например, световая индикация, звуковая сигнализация и т.п. Система отображения 212 предоставляет хирургу 202 изображение операционного поля, а также может обеспечить другой информацией в визуальном, звуковом и/или тактильном формате. Система управления 214 может включать в себя одно или более различных устройств ввода; например, контроллеры с ручным управлением 215, джойстики, перчатки, клавиатуры 216, кнопки, педали 217, мониторы с сенсорным экраном, мыши и т.п. Также может быть предусмотрен микрофон, чтобы хирург мог отдавать речевые команды системе управления. Некоторые компоненты одновременно являются элементами и системы отображения 212, и системы управления 214; например, ручные контроллеры с обратной связью по усилию и мониторы с сенсорным экраном оба одновременно и отображают информацию, и принимают сигнал.
[0091] Хирург 202 выполняет малоинвазивную хирургическую операцию, совершая манипуляции с устройствами управления системы управления 214. Выходные сигналы системы управления 214 поступают в систему обработки данных 218. Одной из функций системы обработки данных 218 является преобразование выходных данных системы управления 214 в управляющие сигналы для работы системы манипуляции над пациентом 204. Пульт управления хирурга 201 соединен при помощи кабеля 206 с манипуляторами над пациентом 240 и 242. Хирург 204, приводя в действие устройства управления, управляет системой манипуляции над пациентом 204 и руками манипулятора 240, осуществляя позиционирование и управление хирургическими инструментами и эндоскопом, соединенными с руками манипулятора 240. Перемещение хирургических инструментов наблюдается с помощью эндоскопа, и изображение хирургических инструментов передается в систему обработки данных 218. Система обработки данных преобразует изображение хирургических инструментов и передает его (и другую информацию) в систему отображения данных 212, где ее получает хирург 202.
[0092] На ФИГ. 3A и 3B показан альтернативный вариант осуществления инструмента для доставки нити 350, установленного на руке манипулятора 240. Инструмент для доставки нити имеет загрузочный паз 310, в который устанавливается картридж 320 с катушкой 356. Картридж 320 выполнен по форме и размеру с возможностью проходить через загрузочный паз 310 в ствол инструмента 354, как показано на ФИГ. 3A. Инструмент для доставки нити 350 имеет механизм транспортировки 312 для перемещения картриджа 320 от загрузочного паза 352 к дистальному концу инструмента для доставки нити 350, где к нему имеется доступ для вывода нити 100 через выходной паз 314. В некоторых вариантах осуществления ведомые передаточные механизмы 248 руки манипулятора 240 приводят в действие механизм транспортировки через сопряженные передаточные механизмы (на фигуре не показаны) в корпусе 352. Механизм транспортировки 312 представляет собой, например, проволочно-канатную передачу, винтовую передачу или аналогичную передачу для линейного перемещения картриджа по стволу инструмента 354.
[0093] Для введения катушки 356 к месту операции в организме пациента сначала под управлением хирурга на операционном поле позиционируется дистальный конец инструмента для доставки нити 350. Затем в загрузочный паз 310 инструмента для доставки нити 350 загружают картридж 320. Затем приводят в действие механизм транспортировки 312, перемещающий картридж 320 от загрузочного паза 310 до выходного паза 314 на дистальном конце инструмента для доставки нити 350, как показано стрелкой 317. Когда картридж 320 достигает дистального конца инструмента для доставки нити 350, к картриджу 320 через выходной паз 314 открывается достаточный доступ, что позволяет извлечь нить и иглы из картриджа 320, как показано на ФИГ. 3B. Затем самоудерживающуюся нить 100 извлекают из картриджа 320 при помощи другого хирургического инструмента в операционном поле. В некоторых вариантах осуществления катушку 356 можно вращать в выходном пазу 314 для удаления нити с катушки. В некоторых вариантах осуществления иглы и излишки нити повторно возвращают в картридж 320 после наложения самоудерживающейся нити 100. После этого картридж 320 извлекают из организма, перемещая механизм транспортировки 356 в противоположном направлении и оттягивая картридж 320 от выходного паза 314 к загрузочному пазу 310, где картридж 320 можно извлечь и заменить новым картриджем 320.
[0094] Преимуществом является возможность автоматической доставки одного или более картриджей 320 посредством инструмента для доставки нити 350. Безопасность автоматической доставки картриджей обеспечивается тем, что картридж 320 остается внутри инструмента для доставки нити 350. Кроме того, инструмент для доставки нити сам по себе не меняет положение в процессе автоматической доставки картриджа (перемещается только картридж). После позиционирования инструмента для доставки нити под управлением хирурга риск повреждения ткани в пределах места операции в связи с введением или втягиванием нового картриджа 320 минимален или практически исключен. Таким образом, подача и удаление картриджей для нити 320 осуществляются автоматически или ассистентом хирурга без необходимости проверять положение для доставки последующих картриджей.
[0095] На ФИГ. 3C показан один вариант осуществления инструмента для доставки нити 350, выполненного с возможностью перемещения картриджа 320 от проксимального конца ствола 354 к дистальному концу ствола 354. На ФИГ. 3D показан в разрезе ствол инструмента 354. На ФИГ. 3E и 3F представлены виды одного варианта осуществления картриджа для использования совместно с инструментом для доставки нити 350, показанным на ФИГ. 3C. На ФИГ. 3C показаны внутренние элементы корпуса 352 и ствола инструмента 354. Как показано на ФИГ. 3C, механизм транспортировки содержит резьбовой стержень 316, проходящий по длине ствола инструмента 354. На каждом конце резьбового стержня 316 находится втулка, что обеспечивает вращение резьбового стержня. Натяжной барабан 360 внутри корпуса 352 непосредственно соединен с передаточным механизмом корпуса 352, выполненным с возможностью сопряжения с ведомым передаточным механизмом устройства сопряжения руки манипулятора. Передаточный механизм передает вращение натяжного барабана 360 резьбовому стержню 316. В некоторых вариантах осуществления передаточный механизм представляет собой редукторный механизм или может содержать систему с барабанным приводом, как показано на ФИГ. 3C. Как показано на ФИГ. 3C, петля тросика 364 обернута вокруг натяжного барабана 360 и направляющего ролика 364 между натяжным барабаном 360 и направляющим роликом 364, тросик 364 также обернут вокруг ролика 366, установленного на резьбовом стержне 316. Таким образом, когда натяжной барабан 360 поворачивается под действием ведомого передаточного механизма руки манипулятора, резьбовой стержень также начинает вращаться. Когда картридж 320 вводят в загрузочный паз 310, желобок 322 на картридже 320 входит в зацепление с резьбовым стержнем 316.
[0096] Когда картридж 320 входит в зацепление с резьбовым стержнем 316, поворот резьбового стержня 316 вызывает перемещение картриджа вверх или вниз по стволу инструмента 354 в зависимости от направления вращения резьбового стержня 316. Резьбовой стержень 316 может вращаться в одном направлении, перемещая картридж 320 от загрузочного паза 310 к выходному пазу 316. Резьбовой стержень 316 можно вращать в противоположном направлении, перемещая картридж 320 от выходного паза 316 назад к загрузочному пазу 310, где картридж можно извлечь/заменить. Следует отметить, что в некоторых вариантах осуществления, как показано на ФИГ. 3C, картридж представляет собой челнок, являющийся неотъемлемой составной частью инструмента для доставки нити 350. В таких вариантах осуществления вместо удаления и замены картриджа нити загружают и выгружают из челнока для транспортировки к дистальному концу инструмента для доставки нити 350 или в противоположном направлении.
[0097] На ФИГ. 3D представлен вид в разрезе ствола 354 вдоль линии D-D на ФИГ. 3C. Положение картриджа 320 внутри ствола показано пунктирной линией. Следует отметить, что внутренняя часть желобка 322 упирается и входит в зацепление с резьбовым стержнем 316. Следует также отметить, что ствол 354 имеет внутренний выступ 318, который также входит в зацепление с желобком 322, препятствуя вращению картриджа 320.
[0098] На ФИГ. 3E и 3F показан один вариант осуществления картриджа 320, который можно использовать совместно с инструментом для доставки нити 350, показанным на ФИГ. 3C и 3D. Как показано на ФИГ. 3E, картридж 320 содержит цилиндр длиной несколько сантиметров с диаметром, который несколько меньше внутреннего диаметра ствола 354. Картридж 320 имеет желобок 322 на задней поверхности. Размер желобка 322 позволяет ему проходить поверх резьбового стержня 316 и выступа 318 инструмента для доставки нити 350. Желобок 322 имеет на поверхности элементы 324 для зацепления с резьбовым стержнем 316. Элементы поверхности 325 включают, например, резьбу, ребра или аналогичные контактные поверхности, обеспечивающие сцепление с резьбовым стержнем 316 для линейного перемещения картриджа 320. Картридж 320 имеет отверстие 321 на передней поверхности, через которое самоудерживающуюся нить 100 загружают в полую камеру 326. Полая камера содержит гнезда для игл 328 для установки игл 110, 112 самоудерживающейся нити 100 с возможностью удаления. Лигатура 102 размещается линейно внутри полой камеры 326, огибая штифт 329 и удерживая таким образом самоудерживающуюся нить 100 на месте в процессе транспортировки. Если необходим более длинный отрезок самоудерживающейся нити 100, то его сворачивают спиралью внутри картриджа 320. Картридж 320 дополнительно может содержать несколько гнезд для игл и утолщений, так что в картридж 320 можно поместить две или более самоудерживающиеся нити 100.
C. Картриджи для нити для систем доставки нити
[0099] На ФИГ. 4A-4G показаны различные картриджи для нити, которые могут использоваться совместно с инструментами МИХ для доставки нити в соответствии с вариантами осуществления настоящего изобретения. В общем, диаметр картриджа должен быть меньше, чем диаметр отверстия доступа, т.е. диаметр картриджа должен, как правило, составлять 10 мм или меньше. Длина картриджа определяется количеством нити, которое он должен в себе содержать. На практике, размер картриджа должен предпочтительно быть лишь частью длины инструмента для доставки нити. Таким образом, длина картриджей предпочтительно должна составлять 120 мм или менее, более предпочтительно - 80 мм или менее. В некоторых случаях картриджи имеют длину 10 мм или менее. Картридж должен также иметь соединительное звено, отверстие, желобок или т.п., для присоединения картриджа к инструменту для доставки нити или сцепления с приводным механизмом инструмента для доставки нити. Каждый картридж и катушка, раскрытые в настоящем документе, выполнены с возможностью использования с каждым из раскрытых в настоящем документе инструментов для доставки нити путем добавления соответствующих устройств сопряжения для сцепления с инструментом для доставки нити.
[00100] На ФИГ. 4A показан картридж 410, содержащий катушку 412 со спиральным желобком 414. Как показано на ФИГ. 4A, самоудерживающаяся нить 100 обернута вокруг катушки 412 внутри спирального желобка 414. В предпочтительных вариантах осуществления картридж включает в себя механизм предотвращения спутывания нити или самоудерживающейся нити. Например, по отношению к картриджу 410, фиксаторы участка 142, обращенные в заданном направлении, находятся на некотором расстоянии от фиксаторов участка 146, обращенных в противоположном направлении (и отделенных от участка 142 переходным сегментом 144). В некоторых вариантах осуществления самоудерживающаяся нить 100 достаточно туго обернута вокруг катушки 412, благодаря чему множества фиксаторов не перекрываются друг с другом; например, в некоторых вариантах осуществления иглы 110 и 112 на двух концах самоудерживающейся нити 100 установлены с возможностью удаления в гнезда для игл 416 и 417, соответственно, для достижения необходимого натяжения.
[00101] Следует отметить, что спиральный желобок 414 имеет достаточную глубину, чтобы нить 100 не выступала над выступами между витками желобка 414. Следует понимать, что в данном конкретном варианте осуществления для удержания нити 100 на месте в желобках на катушке 412 можно использовать структуры фрикционного сцепления. Следует отметить, что нить 100 необходимо разматывать с катушки 412, поэтому катушка 412 должна быть установлена таким образом, чтобы обеспечить ее свободное вращение или беспрепятственное разматывание нити 100 с катушки 412. Как показано на ФИГ. 4A, картридж 410 имеет центральное отверстие 418 для установки картриджа на штифт на конце инструмента для доставки нити (например, инструмента для доставки нити 150, показанного на ФИГ. 1C, или инструмента для доставки нити 250, показанного на ФИГ. 2A). Отверстие снабжено блокировочным механизмом, так что штифт удерживается внутри отверстия 418 с возможностью удаления, в то же время обеспечивая вращение картриджа 410 в процессе удаления самоудерживающейся нити 100.
[00102] На ФИГ. 4B представлен вид в частичном разрезе варианта картриджа 410, показанного на ФИГ. 4A. В показанном на ФИГ. 4B варианте осуществления катушка 412 снабжена оболочкой 430, покрывающей катушку 412, удерживая нить 100 внутри желобка 414. Нить 100 может быть удалена путем сдвига оболочки 430 с катушки 412 (плавное или быстрое движение). В альтернативном варианте осуществления оболочка 430 изготовлена из материала, который может быть разорван нитью при разматывании нити 100. Оболочка 430 может, например, иметь перфорацию вдоль желобка 414, чтобы нить 100 могла прорвать оболочку 430 при разматывании с катушки 412. Такую оболочку можно также использовать совместно с другими картриджами, описанными в настоящем документе. Оболочка служит для защиты нити в процессе доставки к месту операции и для удержания нити внутри картриджа в процессе доставки. В некоторых вариантах осуществления хирург может снять оболочку при помощи другого хирургического инструмента. В других вариантах осуществления оболочку удаляют путем приведения в действие инструмента для доставки нити, на который установлен картридж.
[00103] Как показано на ФИГ. 4C, самоудерживающаяся нить 100 обернута вокруг катушки 422 и размещается внутри двойных спиральных желобков 424. Фиксаторы участка 142, обращенные в указанном направлении, находятся на некотором расстоянии от фиксаторов участка 146, обращенных в противоположном направлении (и отделенных от участка 142 переходным сегментом 144). В некоторых вариантах осуществления самоудерживающаяся нить 100 достаточно туго обернута вокруг катушки 422, благодаря чему множества фиксаторов не перекрываются друг с другом. Например, в некоторых вариантах осуществления иглы 110 и 112 на двух концах самоудерживающейся нити 100 установлены с возможностью удаления в гнезда для игл 426 и 427, и переходный сегмент 144 может быть обернут вокруг штифта 423, соответственно, для достижения необходимого натяжения. Следует отметить, что спиральный желобок 424 имеет достаточную глубину, чтобы нить 100 не выступала над выступами между витками желобков 424. Следует понимать, что в данном конкретном варианте осуществления для удержания нити 100 на месте в желобках на катушке 422 можно использовать структуры фрикционного сцепления. Следует отметить, что нить 100 необходимо разматывать с катушки 422, поэтому катушка 422 должна быть установлена таким образом, чтобы обеспечить ее свободное вращение или беспрепятственное разматывание нити 100 с катушки 422. Как показано на ФИГ. 4A, картридж 420 имеет центральный выступ 428 для установки картриджа на конце инструмента для доставки нити, например, инструмента для доставки нити 150, показанного на ФИГ. 1C, или инструмента для доставки нити 250, показанного на ФИГ. 2A. Выступ снабжен блокировочным механизмом 429, так что выступ удерживается с возможностью удаления внутри инструмента для доставки нити, в то же время обеспечивая вращение картриджа 420 в процессе удаления самоудерживающейся нити 100.
[00104] В некоторых вариантах осуществления желобок 414 или желобки 424 снабжены удерживающими приспособлениями, обеспечивающими удерживание самоудерживающейся нити 100 с возможностью удаления, позволяющее контролировать самоудерживающуюся нить 100 во время ее разматывания с катушки. Например, как показано на ФИГ. 4D, желобок имеет такую форму, что соседние стенки желобков приблизительно параллельны друг другу и расстояние между ними несколько меньше диаметра нити 100. Таким образом, стенки могут удерживать нить 100 в желобке, даже когда натяжение нити 100 ослабевает. Стенки обладают достаточной гибкостью, благодаря чему они могут раздвигаться под действием небольшого усилия, принимая или высвобождая нить 100 в процессе ее наматывания на катушку или разматывания с катушки. Такая конфигурация спирального желобка образует по существу непрерывный спиральный зажим, который слегка удерживает нить 100 у поверхности катушки. В альтернативных вариантах осуществления для удерживания нити 100 на месте используют другие конфигурации желобка и зажимов. Например, съемные зажимы могут быть размещены вдоль спирального желобка через некоторые промежутки. В альтернативном варианте осуществления для удержания нити 100 в отсутствии натяжения вдоль спирального желобка может быть непрерывно или отдельными участками нанесен удаляемый клей или гель. Катушки различных описанных в настоящем документе вариантов осуществления удерживают нити таким образом, чтобы не сдавливать и не изменять положения фиксаторов. Обычно фиксаторы выступают в поверхности нити, то есть фиксаторы приподняты над или отходят от тела нити. Может быть желательно, чтобы в контейнере или картридже, таком как катушка, фиксаторы оставались в отходящем от нити положении и не прижимались к нити. Кроме того, следует понимать, что некоторые материалы, такие как полимеры, из которых может быть изготовлено тело нити, могут обладать эффектом запоминания формы. Другими словами, нить может запомнить некоторую форму после пребывания в такой форме в течение некоторого времени, например, после пребывания в контейнере. При использовании катушки нить может принять или «запомнить» форму с множеством мелких петель. Это может служить преимуществом в ситуациях, когда необходим малый радиус сшивания. При использовании нити с множеством мелких петель нить можно свернуть спиралью, а мелкие петли нити облегчают сшивание ткани в случае, если требуется наложение стежков малого радиуса. Более того, при использовании таких картриджей на внутренние поверхности картриджей может быть нанесено лекарственное вещество, таким образом, при извлечении нити из картриджей нанесенные на поверхности спиральных желобков лекарственные вещества могут, например, под действием трения переходить на нить и таким образом доставляться к ткани.
[00105] Картриджи 410 и 420 предпочтительно имеют диаметр 10 мм или менее, чтобы их можно было ввести через канюлю/направляющую в организм пациента. Длина картриджей 410, 420 может варьироваться в зависимости от длины самоудерживающейся нити 100 и количества витков желобка, необходимого для размещения самоудерживающейся нити 100. Например, если катушки 412, 422 имеют диаметр 10 мм, один виток нити на катушке будет иметь длину приблизительно 30 мм. Таким образом, для нити общей длиной 70 мм потребуется менее трех витков желобка по периметру окружности катушки. Для нити общей длиной 140 мм потребуется менее пяти витков желобка по периметру окружности катушки. Эти три-пять витков желобка могут быть обеспечены уже в картридже длиной 10 мм в катушке длиной 10 мм или меньше. Это позволяет установить на конец инструмента для доставки нити три-пять картриджей длиной 10 мм или менее, чтобы обеспечить одновременное введение множества самоудерживающихся нитей к месту операции. Как показано на ФИГ. 4E, инструмент для доставки нити 450 включает в себя шпиндель 452. Шпиндель 452 принимает множество картриджей 454, в каждом из которых находится самоудерживающаяся нить 100 с иглами. Каждый картридж 454 имеет центральное отверстие 455 для шпинделя 452. На дистальном конце шпинделя 452 предусмотрен захват 456, удерживающий с возможностью удаления множество картриджей на шпинделе 452 в процессе работы с инструментом. В некоторых вариантах осуществления вдоль длины шпинделя 452 расположены дополнительные захваты 456, что в некоторых вариантах осуществления позволяет надежно удерживать на шпинделе 452 меньше чем максимальное количество картриджей.
[00106] На ФИГ. 4F и 4G представлены два вида в частичном разрезе картриджа для нити 460, который можно использовать с инструментами МИХ для доставки нити в соответствии с вариантами осуществления настоящего изобретения. В картридже 460 самоудерживающаяся нить 100 имеет линейную конфигурацию. Линейная конфигурация допустима для использования с короткими отрезками нити, часто используемыми в малоинвазивной хирургии. Например, в одном варианте осуществления самоудерживающаяся нить 100, в некоторых вариантах осуществления, имеет общую длину приблизительно 70 мм, где каждый из участков 142 и 146 имеет длину приблизительно 35 мм. Картридж 460 должен иметь длину приблизительно 40 мм, чтобы вместить 70 мм нити в конфигурации, показанной на ФИГ. 4F. В другом варианте осуществления самоудерживающаяся нить 100, в некоторых вариантах осуществления, имеет общую длину приблизительно 140 мм, где каждый из участков 142 и 146 имеет длину приблизительно 70 мм. Картридж 460 должен иметь длину приблизительно 80 мм, чтобы вместить 140 мм нити в конфигурации, показанной на ФИГ. 4F.
[00107] Как показано на ФИГ. 4F и 4G, картридж 460 имеет приблизительно цилиндрическую форму и выступ 462 на проксимальном конце для соединения с возможностью удаления с инструментом для доставки нити. Картридж 460 имеет отверстие 464 на дистальном конце, обеспечивающее доступ к внутренней части картриджа 460. Рядом с отверстием 464 предусмотрено множество гнезд для игл 466 для установки с возможностью удаления множества игл. Как показано на ФИГ. 4F и 4G, самоудерживающаяся нить 100 содержится в картридже 460, при этом иглы 110 и 112 установлены с возможностью удаления рядом с отверстием 464 в гнездах для игл 466. Продольная перегородка 467 разделяет участки 142 и 146 самоудерживающейся нити 100. Участок 144 самоудерживающейся нити 100 проходит через паз 468 в перегородке 467. При наложении самоудерживающуюся нить 100 можно потянуть вдоль/через паз 468 в направлении отверстия 464. Паз 468 раскрывается, и самоудерживающаяся нить 100 высвобождается из картриджа 460 через отверстие 464.
[00108] Картридж 460 может включать в себя несколько различных нитей в аналогичных конфигурациях, отделенных друг от друга перегородками или т.п. Как показано на ФИГ. 4H, множество петель нити 100 отделены друг от друга при помощи перегородок 472, так что, в некоторых вариантах осуществления, каждую нить извлекают из картриджа по отдельности. Сложенные стопкой нити можно загрузить в картридж для нити 470. Картридж 470 имеет достаточное количество гнезд для игл для каждой иглы всех нитей. В ходе операции хирург может по одной извлекать нити и связанные с ними иглы, не трогая другие нити 100.
Магазин картриджей для нити для систем доставки нити
[00109] В некоторых ситуациях в некоторых вариантах осуществления желательно автоматизировать доставку, загрузку и замену картриджей для доставки нити на инструменте для доставки нити в системе дистанционной хирургии. В одном примере, где дистанционная хирургическая операция выполняется в удаленном месте, в некоторых вариантах осуществления не предусмотрен ассистент, находящийся рядом с пациентом и осуществляющий загрузку картриджей в систему доставки нити. В другом примере, в некоторых вариантах осуществления, является более целесообразным или надежным предоставить хирургу возможность выбрать нить при помощи пульта управления хирурга, чем полагаться на эффективное взаимодействие хирурга и ассистента, находящегося рядом с пациентом. Магазин картриджей для нити содержит множество картриджей для нити. Селекторный механизм позволяет хирургу выбрать картридж для загрузки в инструмент для доставки нити из числа имеющихся в магазине картриджей. Механизм загрузки/выгрузки картриджа загружает картридж на/в инструмент для доставки нити и выгружает картридж после наложения шва. Это позволяет хирургу выбрать нить и наложить шов в операционном поле с пульта управления хирурга без помощи ассистента.
[00110] На ФИГ. 5A-5C показан магазин картриджей для нити 500, выполненный с возможностью выбора, загрузки и выгрузки картриджей 520 в инструмент для доставки нити 550, установленный на руке манипулятора 540. Корпус 552 магазина картриджей нити 500 установлен с возможностью удаления на устройстве сопряжения 546 на руке манипулятора 540. В этом варианте осуществлении магазин 500 установлен на устройстве сопряжения 546 рядом с загрузочным пазом 522 в инструменте для доставки нити 550. Таким образом, в этом варианте осуществления магазин 500 имеет фиксированное местоположение относительно инструмента для доставки нити 550. В других вариантах осуществления, таких, где картридж загружается с дистального конца инструмента для доставки нити, в некоторых вариантах осуществления магазин 500 не имеет фиксированного положения относительно руки манипулятора 540. В таком случае инструмент для доставки нити втягивают, переводя дистальный конец инструмента в положение для загрузки, а после загрузки вводят в организм пациента.
[00111] Как показано на ФИГ. 5A-5C, на устройство сопряжения 546 установлена опора 502. Опора 502 удерживает селекторный механизм 504 и механизм загрузки/выгрузки 506. Магазин 500 имеет выгнутую форму и множество подпружиненных отсеков 508, каждый из которых выполнен с возможностью фиксации картриджа с возможностью удаления. Количество отсеков можно выбрать, исходя из потребностей системы. Отсеки 508 открываются в направлении внутренней и внешней частей магазина. Однако оболочка 510 по существу закрывает магазин 500 так, что в каждый момент времени в отверстии 512 доступен только один отсек 508. Отсеки могут поворачиваться относительно оболочки 510 так, что в некоторых вариантах осуществления рядом с отверстием 512 может находиться любой из отсеков 508. Магазин 500 установлен на опоре 502 так, что отверстие 512 в оболочке 510 находится рядом с устройством доставки нити 550.
[00112] Селекторный механизм 504 зацепляет магазин 500 так, что он поворачивает отсеки 508 мимо отверстия 512 и инструмента для доставки нити 550, как показано стрелкой 514 на ФИГ. 5A и 5B. Селекторный механизм 504 может вращать отсеки 508 так, что они проходят мимо отверстия 512 для последовательной загрузки картриджей 520. В альтернативном варианте осуществления в картриджи 520, в некоторых вариантах осуществления, загружают различные нити, и в некоторых вариантах осуществления желательно осуществлять селективную загрузку и выгрузку любого из картриджей. В некоторых вариантах осуществления данные о нитях вводят в систему вручную после загрузки магазина, или, в более предпочтительном варианте, каждый картридж содержит машиночитаемое устройство, такое как штрих-код или радиометку, идентифицирующую загруженную в картридж нить. Таким образом, система может автоматически определить доступные в магазине нити, а также расположение соответствующих картриджей в магазине, путем последовательного считывания каждого машиночитаемого устройства при загрузке магазина. Пульт управления хирурга должен отображать для хирурга данные о доступных в картриджах магазина нитях и позволять хирургу выбрать нить для использования при проведении конкретной процедуры. Когда хирург выбирает нить, селекторная система 504 пошагово поворачивает магазин 500 до тех пор, пока необходимый картридж 520 не окажется рядом с отверстием 512 и инструментом для доставки нити 550. Приведение селекторной системы 504 в действие предпочтительно осуществляется одним или более исполнительными устройствами/приводами, управляемыми хирургом с пульта управления хирурга. В некоторых вариантах осуществления селекторная система 504 может быть соединена с ведомым передаточным механизмом 248 (см. ФИГ. 2A) устройства сопряжения 546.
[00113] Когда необходимый картридж 520 оказывается рядом с отверстием 512 и инструментом для доставки нити 550, активируется механизм загрузки/выгрузки 506 и выталкивает картридж 520 из подпружиненного отсека 508 через отверстие 512 в загрузочный паз 522 инструмента для доставки нити 550 (см. стрелку 516 на ФИГ. 5C). Затем механизм транспортировки инструмента для доставки нити можно привести в действие для перемещения картриджа 520 к дистальному концу инструмента для доставки нити 550 для наложения шва. После наложения шва картридж 520 перемещается назад к загрузочному пазу инструмента для доставки нити 550. После этого механизм загрузки/выгрузки 506 приводят в действие для оттягивания картриджа 520 от загрузочного паза в подпружиненный отсек 508. Затем хирург может выбрать новую нить, и в ответ на сделанный хирургом выбор нити автоматически выбирается и загружается соответствующий картридж. Механизм загрузки/выгрузки 506 приводится в действие одним или более исполнительными устройствами/приводами, управляемыми хирургом с пульта управления хирурга. В некоторых вариантах осуществления механизм загрузки/выгрузки 506 может быть соединен с ведомым передаточным механизмом 248 (см. ФИГ. 2A) устройства сопряжения 546.
[00114] Следует отметить, что все раскрытые в настоящем документе системы доставки нити в некоторых вариантах осуществления можно использовать для доставки гладких нитей. Более того, в различных вариантах осуществления системы доставки нити используются для доставки самоудерживающихся нитей различных конфигураций, включая однонаправленные самоудерживающиеся нити, однонаправленные самоудерживающиеся нити с элементом крепления на одном конце и иглой на другом конце; и/или двунаправленные самоудерживающиеся нити, как упоминалось в настоящем документе.
[00115] На ФИГ. 6A представлен альтернативный вариант осуществления системы самоудерживающейся нити 600. Система самоудерживающейся нити 600 включает в себя иглу 110 и участки 140, 142 и 144 системы самоудерживающейся нити 100, представленной на ФИГ. 1A. Однако система самоудерживающейся нити 600 представляет собой систему, имеющую иглу только с одной стороны. Как показано на ФИГ. 6A, волокно 120 после участка 144 заканчивается тканевым фиксатором 602a. Тканевый фиксатор 602a представляет собой устройство для зацепления ткани и предотвращения перемещения волокна 120 сквозь ткань в направлении иглы 110. В некоторых вариантах осуществления тканевый фиксатор 602a выполнен зацело с волокном 120 или выполнен отдельно, а впоследствии прикреплен к волокну 120. Как показано на ФИГ. 6A, тканевый фиксатор 602a имеет корпус цилиндрической формы 610a, ориентированный приблизительно перпендикулярно оси волокна 120. Корпус цилиндрической формы 610a является достаточно длинным и жестким, чтобы воспрепятствовать перемещению дистального конца волокна 120 в направлении иглы 110 после зацепления ткани тканевым фиксатором 602a.
[00116] На ФИГ. 6B показан альтернативный тканевый фиксатор 602b, который можно использовать вместо тканевого фиксатора 602a, показанного на ФИГ. 6A. Как показано на ФИГ. 6B, тканевый фиксатор 602b содержит коническое тело 610b. Коническое тело 610b имеет заостренный конец 612b и элементы для зацепления ткани 614b, которые состоят из ребер и/или зазубрин. Тканевый фиксатор 602b выполнен с возможностью проталкивания в ткань с целью фиксации волокна 120 в указанной ткани и предотвращения перемещения дистального конца волокна 120 в направлении иглы 110.
[00117] На ФИГ. 6C показан альтернативный тканевый фиксатор 602c, который можно использовать вместо тканевого фиксатора 602a, показанного на ФИГ. 6A. Как показано на ФИГ. 6C, тканевый фиксатор 602c содержит петлю 610c. В данном варианте осуществления петля 610c выполнена путем загибания конца 612c волокна 120 и закрепления конца 612c на волокне 120 при помощи сварки, спайки и/или клея. Таким образом из материала волокна 120 изготавливают петлю 610c. Петля 610c имеет отверстие 614c, через которое может пройти игла 110 с целью формирования затяжного узла (затягивания), который можно использовать для зацепления ткани и предотвращения перемещения дистального конца волокна 120 в направлении иглы 110.
[00118] На ФИГ. 6D показан альтернативный тканевый фиксатор 602d, который можно использовать вместо тканевого фиксатора 602a, показанного на ФИГ. 6A. Как показано на ФИГ. 6D, тканевый фиксатор 602d содержит скобообразное тело 610d. Волокно 120 проходит через отверстие в фиксаторе 602d и закрепляется обжимом 614d. Скобообразное тело 610d имеет два заостренных конца 612d, которые могут быть вдавлены в ткань и загнуты в направлении друг друга для зацепления ткани и предотвращения перемещения дистального конца волокна 120 в направлении иглы 110.
[00119] На ФИГ. 6E и 6F представлен вид с пространственным разнесением элементов и вид в частичном разрезе картриджа для нити 660, который можно использовать совместно с инструментами МИХ для доставки нити в соответствии с вариантами осуществления настоящего изобретения. Картридж 660 можно использовать для фиксации с возможностью удаления одной или более однонаправленных самоудерживающихся нитей 600 с фиксатором 602a-d, как описано со ссылкой на ФИГ. 6A-6D. В картридже 660 одна или более систем самоудерживающейся нити 600 размещены в линейной конфигурации. Линейная конфигурация допустима для использования с короткими отрезками нити, часто используемыми в малоинвазивной хирургии. Например, в одном варианте осуществления система самоудерживающейся нити 600, в некоторых вариантах осуществления, имеет общую длину приблизительно 70 мм. Картридж 660 должен иметь длину приблизительно 70 мм, чтобы вместить 70 мм нити в конфигурации, показанной на ФИГ. 6E. Как показано на ФИГ. 6E и 6F, картридж 660 имеет приблизительно цилиндрическую форму и выступ 662 на проксимальном конце для соединения с возможностью удаления с инструментом для доставки нити. Картридж 660 имеет отверстие 664 на дистальном конце, обеспечивающее доступ к внутренней части картриджа 660. Рядом с отверстием 664 предусмотрено одно или более гнезд для игл 667 для установки с возможностью удаления одной или более игл 110. Как показано на ФИГ. 6F, картридж 660 может содержать одну или более систем самоудерживающейся нити 600, при этом иглы 110 установлены с возможностью удаления рядом с отверстием 664 при помощи гнезд для игл 666. Фиксаторы 602a-d систем самоудерживающейся нити 600 установлены в направлении проксимального конца картриджа 660.
[00120] В некоторых вариантах осуществления в картридж 660 загружают множество систем самоудерживающейся нити 600. Как показано на ФИГ. 6E, системы самоудерживающейся нити 600 укладывают в стопку и загружают через отверстие 664. При загрузке в картридж 600 множества систем самоудерживающейся нити 600 для пространственного разделения этих систем можно использовать перегородки или подобные разделители. Показанный на ФИГ. 6G картридж 670 и/или перегородки 669 имеют достаточное количество гнезд для игл 667 для установки каждой из игл 110. Как показано на ФИГ. 6E и 6F, множество систем самоудерживающейся нити 600 отделены друг от друга перегородками 669. В некоторых вариантах осуществления каждая из множества систем самоудерживающейся нити 600 может быть извлечена из картриджа 670 в индивидуальном порядке. Для доставки систем самоудерживающейся нити 600 через отверстие в требуемое место в организме пациента картридж 660, содержащий одну или более систем самоудерживающейся нити 600, может быть установлен на эндоскопическом инструменте для доставки нити, как упоминалось ранее. При проведении операции хирург может извлечь одну систему самоудерживающейся нити 600 с соответствующей иглой 110 и фиксатором 602a-d, не затрагивая других систем самоудерживающейся нити 600.
[00121] На ФИГ. 6G показан картридж 670, включающий в себя катушку 656 и соединительный элемент 672. Соединительный элемент 672 обеспечивает прикрепление с возможностью отсоединения картриджа 670 к дистальному концу инструмента, такого как эндоскопический инструмент. Катушка 656 включает в себя спиральный желобок 658, удерживающий с возможностью удаления однонаправленную самоудерживающуюся нить 600 с фиксатором 602a-d, таким как описан со ссылкой на ФИГ. 6A-6D. Как показано на ФИГ. 6G, катушка 656 также включает в себя одно или более гнезд для игл 657, поддерживающих иглу 110 системы самоудерживающейся нити 600. Игла 110 установлена с возможностью удаления в гнезде для иглы 657. Иглу 110 извлекают из гнезда для иглы 657 в процессе использования системы самоудерживающейся нити 600. В некоторых вариантах осуществления иглу 110 возвращают в гнездо для иглы 657, чтобы обеспечить извлечение иглы 110 и излишков самоудерживающейся лигатуры после использования системы самоудерживающейся нити 600.
[00122] На ФИГ. 6H показан картридж 670, присоединенный к удлиненному элементу 682 эндоскопического инструмента 680 для введения через отверстие в организм пациента. В некоторых вариантах осуществления для проведения операций поставляется ряд стерильных картриджей 670, каждый из которых поддерживает различные системы самоудерживающейся нити 100, 600. Таким образом, в ходе операции эндоскопический инструмент для доставки нити 680 может использоваться хирургом или ассистентом для выбора и доставки множества систем самоудерживающейся нити 100, 600. Хирург может совершать манипуляции с рукояткой 684 за пределами тела пациента для доставки катушки 656 к необходимому положению в организме пациента. В некоторых вариантах осуществления для управления установкой и удалением картриджа 670 используют привод 686. В альтернативных вариантах осуществления катушка 656 зафиксирована на конце инструмента для доставки нити 680. Хотя на фигуре показан ручной эндоскопический инструмент 680, для доставки картриджа 670 также можно использовать роботизированный эндоскопический инструмент, как показано, например, на ФИГ. 3A.
[00123] Составляющие предмет настоящего изобретения системы доставки нити в некоторых вариантах осуществления включают в себя системы, дозаторы, устройства и способы, описанные в параграфах 124-195, приведенных ниже.
[00124] Устройство подачи нити, содержащее:
самоудерживающуюся нить, имеющую удлиненное тело нити с первым сегментом, имеющим первое множество фиксаторов, расположенных проксимально по отношению к первому концу, и вторым сегментом, имеющим второе множество фиксаторов, расположенных проксимально по отношению ко второму концу;
удлиненный ствол;
катушку, соединенную с дистальным концом удлиненного ствола, причем самоудерживающаяся нить закреплена на катушке с возможностью удаления; и
привод, прикрепленный к проксимальному концу удлиненного ствола, посредством которого устройство подачи приводится в движение, обеспечивая введение катушки и дистального конца удлиненного ствола через отверстие доступа к месту операции в организме пациента.
[00125] Устройство подачи по параграфу 124, где:
самоудерживающаяся нить содержит первую иглу на первом конце и вторую иглу на втором конце; и
катушка содержит первое гнездо для иглы для первой иглы и второе гнездо для иглы для второй иглы.
[00126] Устройство подачи по параграфу 124, где:
катушка содержит множество изолированных областей под нить для пространственного отделения фиксаторов первого сегмента от фиксаторов второго сегмента.
[00127] Устройство подачи по параграфу 124, где:
катушка содержит множество желобков, отделяющих фиксаторы первого сегмента от фиксаторов второго сегмента.
[00128] Устройство подачи по параграфу 124, где:
катушка соединена с возможностью удаления с дистальным концом удлиненного ствола, так что катушка выполнена с возможностью замены второй катушкой.
[00129] Устройство подачи по параграфу 124, дополнительно содержащее:
оболочку, расположенную поверх катушки и выполненную с возможностью защиты самоудерживающейся нити в процессе введения катушки и дистального конца удлиненного ствола через отверстие доступа к месту операции в организме пациента.
[00130] Устройство подачи по параграфу 124, дополнительно содержащее:
оболочку, расположенную поверх катушки и выполненную с возможностью защиты самоудерживающейся нити в процессе введения катушки и дистального конца удлиненного ствола через отверстие доступа к месту операции в организме пациента; и
причем оболочка выполнена с возможностью открывания для доступа к самоудерживающейся нити.
[00131] Устройство подачи по параграфу 124, дополнительно содержащее:
оболочку, расположенную поверх катушки и выполненную с возможностью защиты самоудерживающейся нити в процессе введения катушки и дистального конца удлиненного ствола через отверстие доступа к месту операции в организме пациента; и
причем привод соединен с оболочкой и может открывать оболочку в организме пациента, обеспечивая доступ к самоудерживающейся нити.
[00132] Устройство подачи по параграфу 124, где:
устройство подачи обеспечено машиночитаемым кодом для идентификации характеристики самоудерживающейся нити.
[00133] Устройство подачи по параграфу 124, где:
катушка включает в себя терапевтическое вещество для нанесения его на самоудерживающуюся нить.
[00134] Устройство подачи нити по параграфу 124, где:
указанная катушка имеет спиральный желобок, удерживающий с возможностью удаления указанную самоудерживающуюся нить.
[00135] Устройство подачи нити по параграфу 124, где:
указанная катушка имеет желобок, удерживающий с возможностью удаления указанную самоудерживающуюся нить.
[00136] Устройство подачи нити по параграфу 124, где:
указанное устройство включает в себя удлиненный канал, удерживающий с возможностью удаления указанную самоудерживающуюся нить.
[00137] Устройство подачи нити по параграфу 124, где:
указанное устройство подачи нити имеет линейный канал, удерживающий с возможностью удаления указанную самоудерживающуюся нить.
[00138] Устройство подачи нити по параграфу 124, где:
все первые фиксаторы указанного первого множества фиксаторов и вторые фиксаторы указанного второго множества фиксаторов выступают вдоль нити в одном направлении.
[00139] Устройство подачи нити по параграфу 124, где:
первые фиксаторы указанного первого множества фиксаторов выступают вдоль указанной нити в первом направлении, и вторые фиксаторы указанного второго множества фиксаторов выступают вдоль нити во втором направлении, и причем указанное первое направление отличается от указанного второго направления.
[00140] Устройство подачи нити по параграфу 124, где:
указанный привод представляет собой рукоятку.
[00141] Устройство подачи нити по параграфу 124, где:
указанный привод представляет собой опору, выполненную с возможностью установки указанного устройства подачи нити на роботизированном хирургическом инструменте.
[00142] Устройство подачи нити по параграфу 124, где:
указанный привод представляет собой опору, выполненную с возможностью установки указанного устройства подачи нити по меньшей мере на одном из хирургических инструментов - на эндоскопическом хирургическом инструменте или на лапароскопическом хирургическом инструменте.
[00143] Устройство подачи нити по параграфу 124, где:
указанная катушка имеет диаметр приблизительно 12 мм или меньше.
[00144] Устройство подачи нити по параграфу 124, где:
указанная катушка имеет диаметр приблизительно 8 мм или меньше.
[00145] Устройство подачи нити по параграфу 124, где:
указанная катушка имеет диаметр приблизительно 5 мм или меньше.
[00146] Устройство подачи нити по параграфу 124, где:
указанный ствол является гибким.
[00147] Устройство подачи нити по параграфу 124, где:
указанная нить включает в себя тампон.
[00148] Устройство подачи нити по параграфу 124, где:
указанное устройство подачи нити выполнено с возможностью управления системой дистанционной хирургии.
[00149] Устройство подачи нити по параграфу 124 в комбинации с системой дистанционной хирургии.
[00150] Устройство подачи нити по параграфу 124 в комбинации с одним из хирургических инструментов - эндоскопическим хирургическим инструментом, роботизированным инструментом или лапароскопическим хирургическим инструментом.
[00151] Устройство подачи нити по параграфу 124, где указанное устройство подачи обеспечено машиночитаемым кодом для идентификации характеристики указанной нити, в комбинации с системой дистанционной хирургии, оснащенной считывателем кодов и дисплеем, и причем указанный считыватель кодов может считывать указанный код, а указанный дисплей может отображать указанный код.
[00152] Устройство подачи нити по параграфу 124, где указанное устройство подачи обеспечено машиночитаемым кодом для идентификации характеристика указанной нити, в комбинации с роботизированным инструментом со считывателем кодов и дисплеем, и причем указанный считыватель кодов может считывать указанный код, а указанный дисплей может отображать указанный код.
[00153] Устройство подачи нити по параграфу 124, где указанное устройство подачи обеспечено машиночитаемым кодом для идентификации одного из или обоих наборов характеристик, статистических и динамических, указанной нити, в комбинации с системой дистанционной хирургии со считывателем кодов и дисплеем, и причем указанный считыватель кодов может считывать указанный код, а указанный дисплей может отображать указанный код.
[00154] Устройство подачи нити по параграфу 124 в комбинации с системой дистанционной хирургии, способной принимать речевые команды по меньшей мере для выбора катушки или наложения шва.
[00155] Устройство подачи нити по параграфу 124, где указанное устройство подачи может принимать и подавать нить с множества катушек.
[00156] Устройство подачи нити по параграфу 124, где указанное устройство подачи представляет собой магазин, который может принимать и подавать нить с множества катушек.
[00157] Устройство подачи нити по параграфу 124, где указанный привод представляет собой устройство сопряжения, выполненное с возможностью прикрепления с возможностью удаления к роботизированной системе, робототехнической системе или системе дистанционной хирургии.
[00158] Устройство подачи нити, содержащее:
самоудерживающуюся нить;
катушку, выполненную с возможностью прикрепления с возможностью отсоединения к хирургическому инструменту; и
канал в указанной катушке, способный выборочно принимать указанную самоудерживающуюся нить.
[00159] Устройство подачи нити по параграфу 158, где указанный канал является винтовым.
[00160] Устройство подачи нити по параграфу 158, где указанный канал является прямым.
[00161] Устройство подачи нити по параграфу 158, включающее оболочку, закрывающую указанную катушку с самоудерживающейся нитью, размещенной в канале указанной катушки.
[00162] Устройство подачи нити по параграфу 158, где указанная катушка имеет диаметр приблизительно 12 мм и меньше.
[00163] Устройство подачи нити по параграфу 158, где указанная катушка имеет диаметр приблизительно 8 мм и меньше.
[00164] Устройство подачи нити по параграфу 158, где указанная катушка имеет диаметр приблизительно 5 мм и меньше.
[00165] Устройство подачи нити по параграфу 158, где указанная нить имеет тампон.
[00166] Устройство подачи нити по параграфу 158, где указанное устройство подачи имеет машиночитаемый код, способный идентифицировать характеристику указанной нити.
[00167] Устройство подачи нити по параграфу 158, где указанная катушка включает в себя по меньшей мере одно гнездо для иглы, а указанная нить включает в себя по меньшей мере одну иглу.
[00168] Устройство подачи нити, содержащее:
самоудерживающуюся нить, имеющую удлиненное тело нити с первым сегментом, имеющим множество фиксаторов, расположенных проксимально по отношению к первому концу, и вторым сегментом, имеющим множество фиксаторов, расположенных проксимально по отношению ко второму концу;
эндоскопический инструмент, содержащий удлиненную трубку;
картридж для нити, расположенный в дистальном конце удлиненной трубки, причем самоудерживающаяся нить соединена с возможностью удаления с картриджем для нити; и
устройство сопряжения, прикрепленное к проксимальному концу удлиненного ствола, посредством манипуляций с которым устройство подачи вводит дистальный конец удлиненного ствола через отверстие доступа к месту операции в организме пациента.
[00169] Устройство подачи по параграфу 168, где:
самоудерживающаяся нить содержит первую иглу на первом конце и вторую иглу на втором конце; и
картридж для нити содержит первое гнездо для иглы для первой иглы и второе гнездо для иглы для второй иглы.
[00170] Устройство подачи по параграфу 168, где:
картридж для нити содержит множество изолированных областей под нить для пространственного отделения фиксаторов первого сегмента от фиксаторов второго сегмента.
[00171] Устройство подачи по параграфу 168, где:
картридж для нити соединен с возможностью удаления с устройством подачи нити, так что катушка выполнена с возможностью замены второй катушкой.
[00172] Устройство подачи по параграфу 168, дополнительно содержащее вторую самоудерживающуюся нить, закрепленную с возможностью удаления во втором картридже для нити, расположенном в удлиненной трубке.
[00173] Устройство подачи по параграфу 168, где:
удлиненная трубка содержит оболочку, расположенную поверх катушки для защиты самоудерживающейся нити в процессе введения дистального конца удлиненной трубки через отверстие доступа к месту операции в организме пациента; и
причем оболочка выполнена с возможностью открывания в организме пациента для доступа к самоудерживающейся нити.
[00174] Устройство подачи по параграфу 168, дополнительно содержащее привод, выполненный с возможностью перемещения картриджа за пределы дистального конца удлиненной трубки, обеспечивая доступ к самоудерживающейся нити.
[00175] Устройство подачи по параграфу 168, где:
картридж обеспечен машиночитаемым кодом, выполненным с возможностью идентификации характеристики самоудерживающейся нити для демонстрации хирургу.
[00176] Устройство подачи по параграфу 168, где:
картридж включает в себя терапевтическое вещество для нанесения его на самоудерживающуюся нить.
[00177] Устройство подачи по параграфу 168, где:
устройство сопряжения выполнено с возможностью прикрепления с возможностью отсоединения к хирургическому робототехническому устройству.
[00178] Система для доставки нити к месту операции в организме пациента эндоскопическим инструментом, содержащая:
множество картриджей, каждый из которых содержит нить;
селектор картриджей, который может выбрать картридж с выбранной нитью; и
привод картриджа, способный перемещать выбранный картридж по эндоскопическому инструменту и открывать выбранный картридж для доступа к самоудерживающейся нити в пределах места операции в организме пациента.
[00179] Система по параграфу 178, дополнительно содержащая хирургическое робототехническое устройство для позиционирования эндоскопического инструмента и, соответственно, позиционирования выбранного картриджа в организме пациента.
[00180] Система по параграфу 178, где селектор реагирует на речевую команду хирурга.
[00181] Система по параграфу 178, где селектор картриджа содержит:
корпус, находящийся вне организма пациента и имеющий множество отсеков для приема множества картриджей; и
устройство совмещения, способное совмещать один из множества отсеков и один из множества картриджей с просветом эндоскопического инструмента для доставки к месту операции в организме пациента.
[00182] Устройство подачи по параграфу 124, где:
указанная катушка включает в себя множество изолированных областей под нить, удерживающих нить и препятствующих перемещению фиксаторов.
[00183] Устройство подачи по параграфу 158, где:
указанная катушка включает в себя множество изолированных областей под нить, удерживающих нить и препятствующих перемещению фиксаторов.
[00184] Устройство подачи по параграфу 124, где:
указанная нить имеет фрагмент с памятью формы, включающий в себя множество петель с размером, приблизительно соответствующим диаметру указанной катушки.
[00185] Устройство подачи по параграфу 158, где:
указанная нить имеет фрагмент с памятью формы, включающий в себя множество петель с размером, приблизительно соответствующим диаметру указанной катушки.
[00186] Устройство подачи по параграфу 168, где:
указанная нить имеет фрагмент с памятью формы, включающий в себя множество петель с размером, приблизительно соответствующим диаметру указанной катушки.
[00187] Устройство подачи по параграфу 178, где:
указанная нить имеет фрагмент с памятью формы, включающий в себя множество петель с размером, приблизительно соответствующим диаметру указанной катушки.
[00188] Устройство подачи по параграфу 124, где:
указанная нить имеет фрагмент с памятью формы, включающий в себя множество петель с размером, приблизительно соответствующим диаметру указанной катушки, причем такие петли облегчают наложение шва с малым радиусом.
[00189] Устройство подачи по параграфу 158, где:
указанная нить имеет фрагмент с памятью формы, включающий в себя множество петель с размером, приблизительно соответствующим диаметру указанной катушки, причем такие петли облегчают наложение шва с малым радиусом.
[00190] Устройство подачи по параграфу 168, где:
указанная нить имеет фрагмент с памятью формы, включающий в себя множество петель с размером, приблизительно соответствующим диаметру указанной катушки, причем такие петли облегчают наложение шва с малым радиусом.
[00191] Устройство подачи по параграфу 178, где:
указанная нить имеет фрагмент с памятью формы, включающий в себя множество петель с размером, приблизительно соответствующим диаметру указанной катушки, причем такие петли облегчают наложение шва с малым радиусом.
[00192] Способ малоинвазивной хирургии, включающий:
доставку картриджа к месту операции, где каждый картридж включает в себя нить с элементами самофиксации и иглой;
доступ к картриджу при помощи эндоскопического инструмента;
использование эндоскопического инструмента для извлечения нити из картриджа;
использование эндоскопического инструмента для ушивания ткани при помощи нити.
[00193] Способ по параграфу 192, где:
указанная стадия доставки включает в себя доставку указанного картриджа при помощи одного из следующих инструментов: эндоскопического инструмента, лапароскопического инструмента, роботизированного инструмента или инструмента дистанционной хирургии.
[00194] Способ по параграфу 192, где:
указанная стадия доставки включает в себя разматывание нити из картриджа.
[00195] Способ по параграфу 193, где:
указанная стадия доставки включает в себя разматывание нити из картриджа.
[00196] Хотя настоящее изобретение было проиллюстрировано и подробно описано со ссылкой лишь на некоторые примеры осуществления настоящего изобретения, специалистам в данной области следует понимать, что настоящее изобретение не ограничивается описанными вариантами осуществления. Описанные варианты осуществления допускают различные модификации, опущения или добавления без существенного отклонения от новых идей и преимуществ настоящего изобретения, в частности, с учетом идей, описанных выше. Таким образом, настоящее изобретение охватывает все такие модификации, сокращения, добавления и эквиваленты, которые в некоторых вариантах осуществления составляют сущность и объем настоящего изобретения, определяемого следующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОУДЕРЖИВАЮЩИЕСЯ НИТИ С РЕГУЛИРУЕМОЙ ПЕТЛЕЙ | 2012 |
|
RU2746457C2 |
| САМОУДЕРЖИВАЮЩИЕСЯ НИТИ С РЕГУЛИРУЕМОЙ ПЕТЛЕЙ | 2012 |
|
RU2659454C2 |
| САМОУДЕРЖИВАЮЩИЕСЯ ШОВНЫЕ МАТЕРИАЛЫ, ВЫДЕЛЯЮЩИЕ ЛЕКАРСТВЕННЫЕ СРЕДСТВА, И ОТНОСЯЩИЕСЯ К НИМ МЕТОДЫ | 2011 |
|
RU2608237C2 |
| САМОУДЕРЖИВАЮЩИЕСЯ ШОВНЫЕ МАТЕРИАЛЫ ДЛЯ НЕОТЛОЖНОЙ ПОМОЩИ И УПАКОВКИ ДЛЯ НИХ | 2011 |
|
RU2580479C2 |
| САМОУДЕРЖИВАЮЩИЕСЯ ШОВНЫЕ МАТЕРИАЛЫ С ВЫСОКОЙ ПЛОТНОСТЬЮ ФИКСАТОРОВ, И УСТРОЙСТВА И СПОСОБЫ ИХ ПРОИЗВОДСТВА | 2011 |
|
RU2564358C2 |
| УСТРОЙСТВО ДЛЯ СШИВАНИЯ САМОУДЕРЖИВАЮЩЕЙСЯ ШОВНОЙ НИТЬЮ С АСИММЕТРИЧНЫМИ ФИКСАТОРАМИ И СПОСОБ ИХ ИЗГОТОВЛЕНИЯ | 2015 |
|
RU2679577C2 |
| ШОВНАЯ НИТЬ, ИМЕЮЩАЯ УДЕРЖИВАЮЩИЙ ЭЛЕМЕНТ НА КОНЦЕ, И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2015 |
|
RU2728569C2 |
| ФИКСАТОРЫ ВОЛОСЯНЫХ ИМПЛАНТАТОВ, СИСТЕМЫ НА ИХ ОСНОВЕ И СПОСОБЫ ИХ ИСПОЛЬЗОВАНИЯ | 2010 |
|
RU2577511C2 |
| СИСТЕМА НАЛОЖЕНИЯ ХИРУРГИЧЕСКИХ КРЕПЛЕНИЙ | 2014 |
|
RU2673374C2 |
| АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ И СПОСОБЫ ИЗГОТОВЛЕНИЯ ПЛЕТЕНЫХ ШОВНЫХ НИТЕЙ С ЗАЗУБРИНАМИ | 2010 |
|
RU2557732C2 |
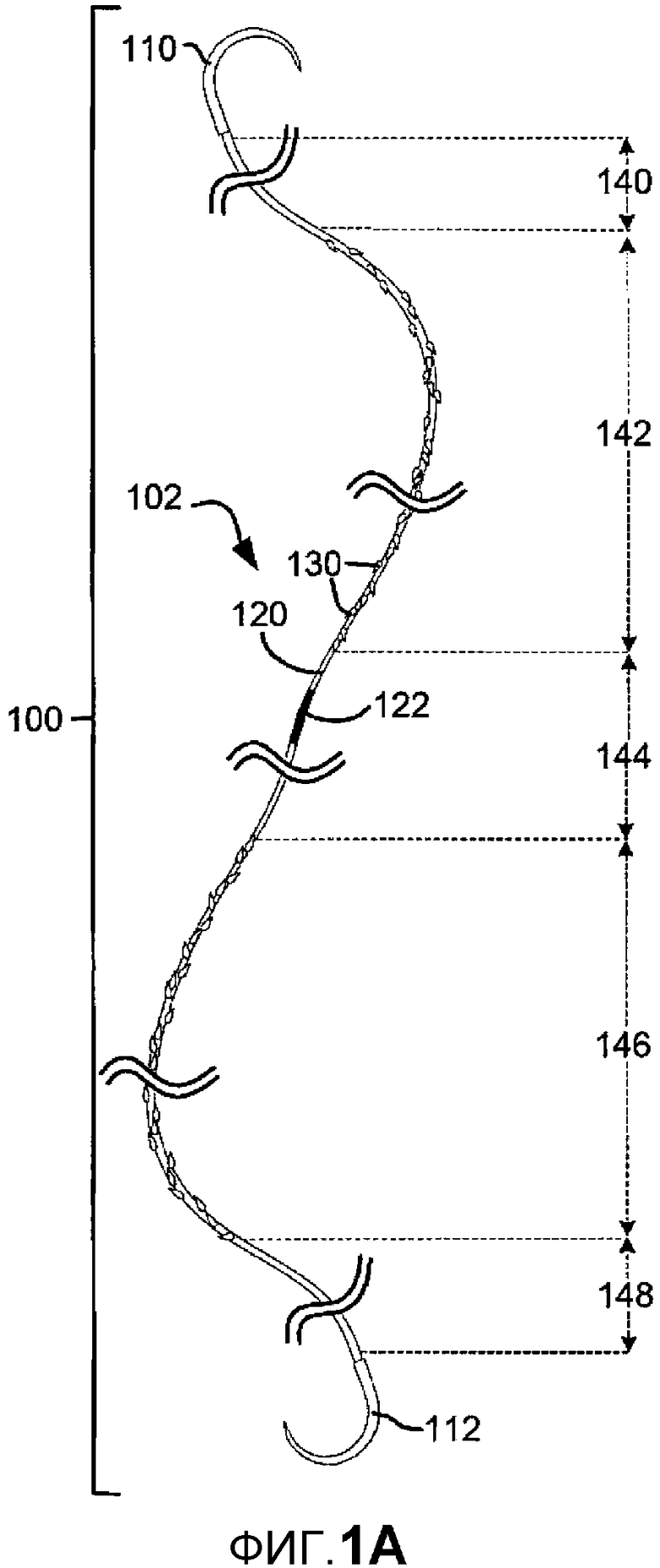
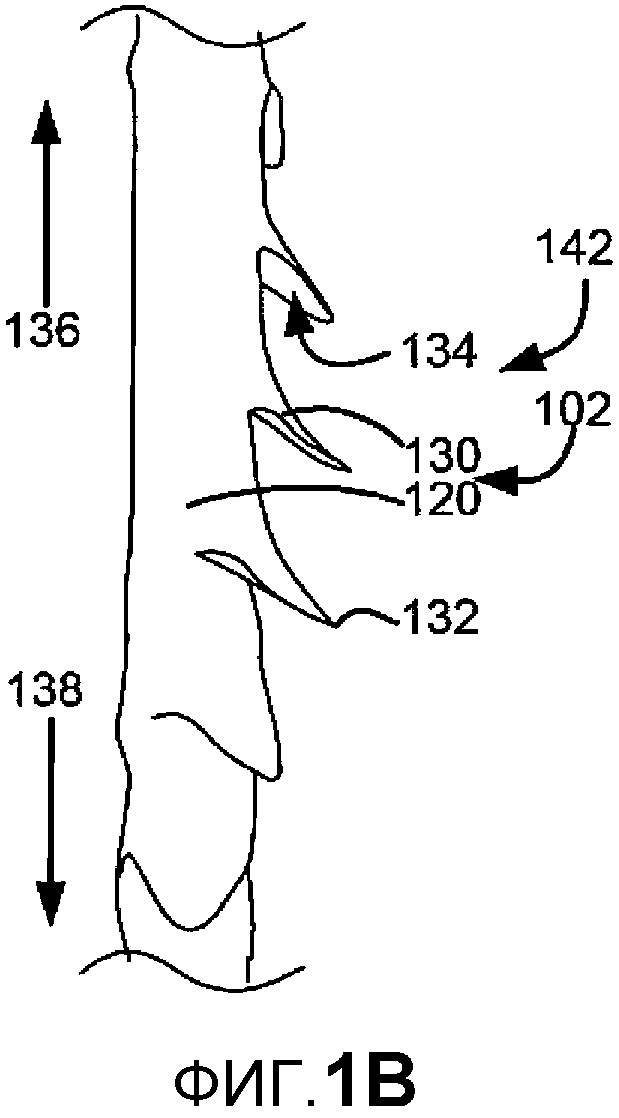
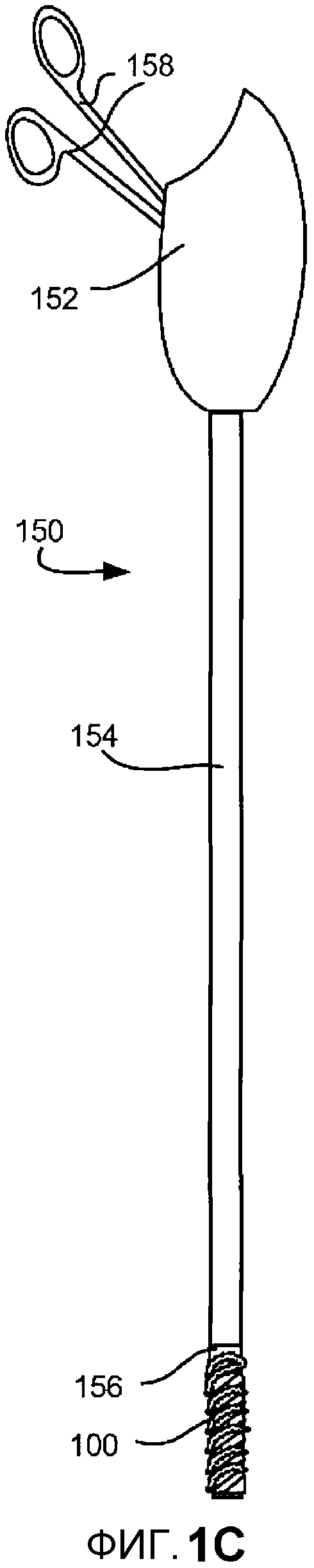
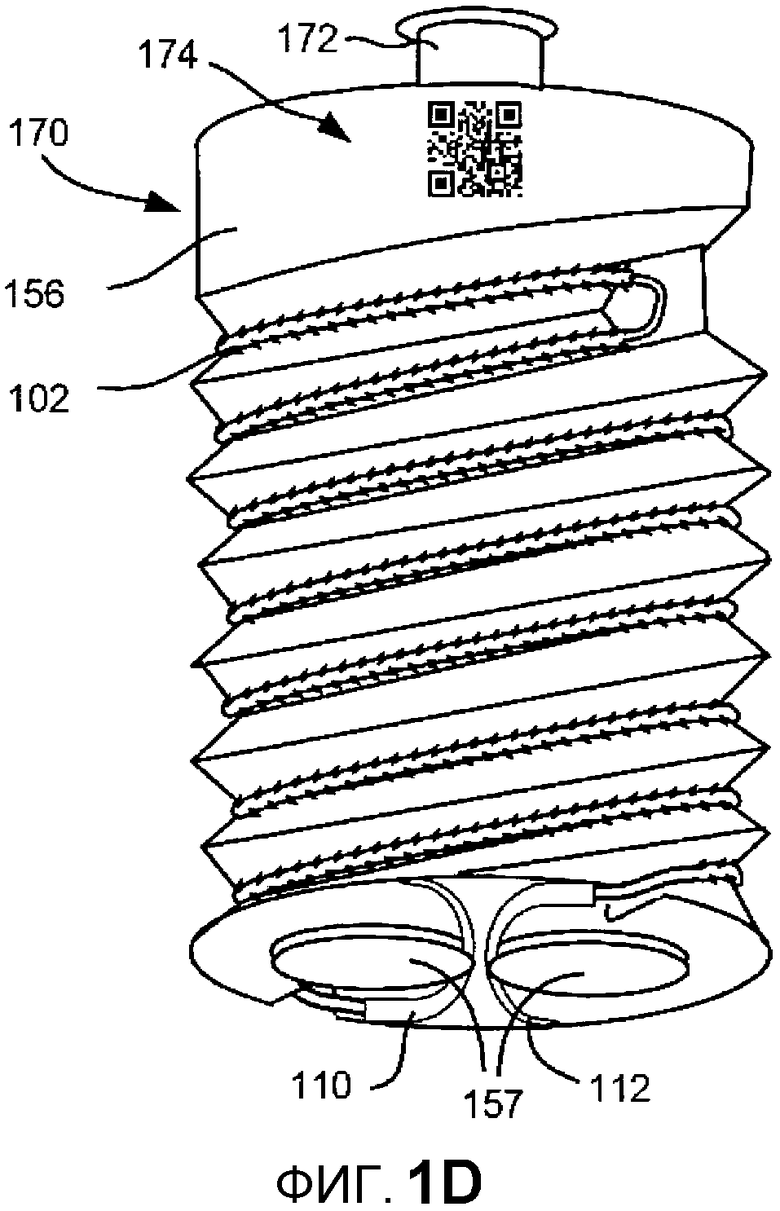

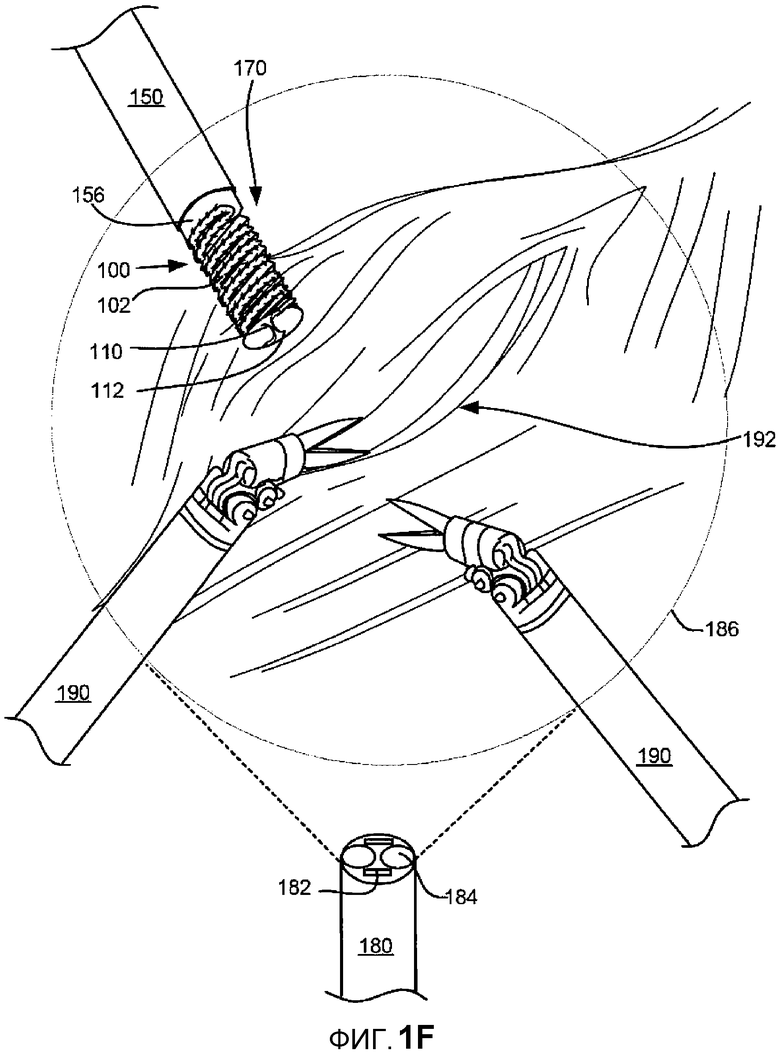
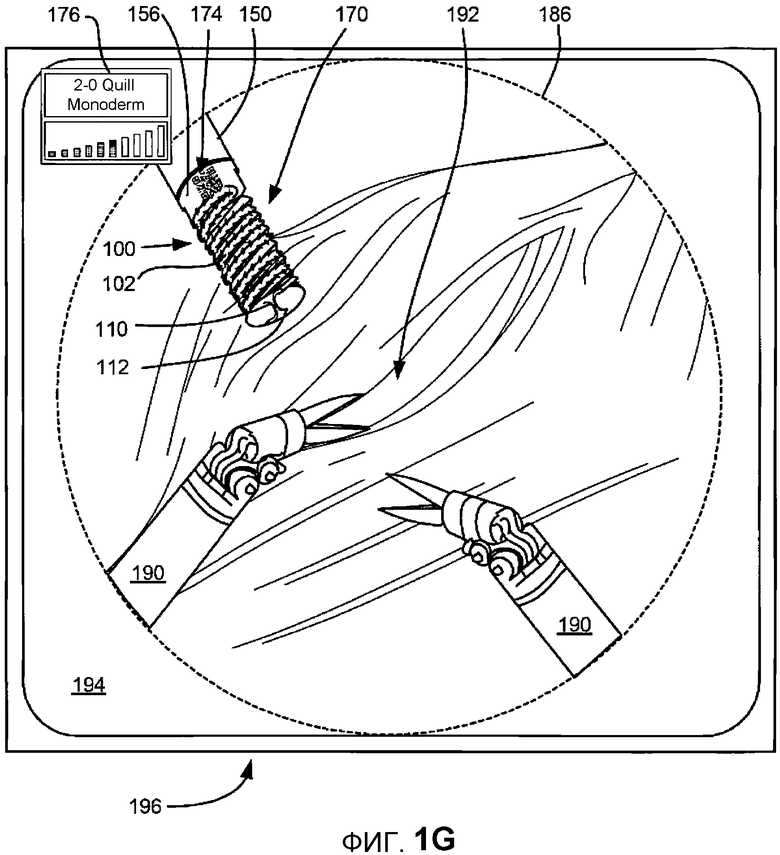
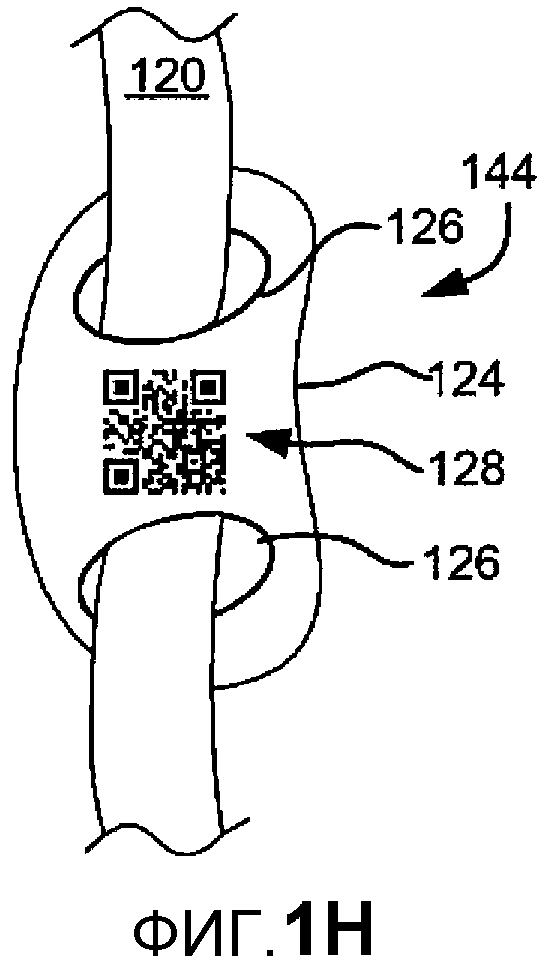
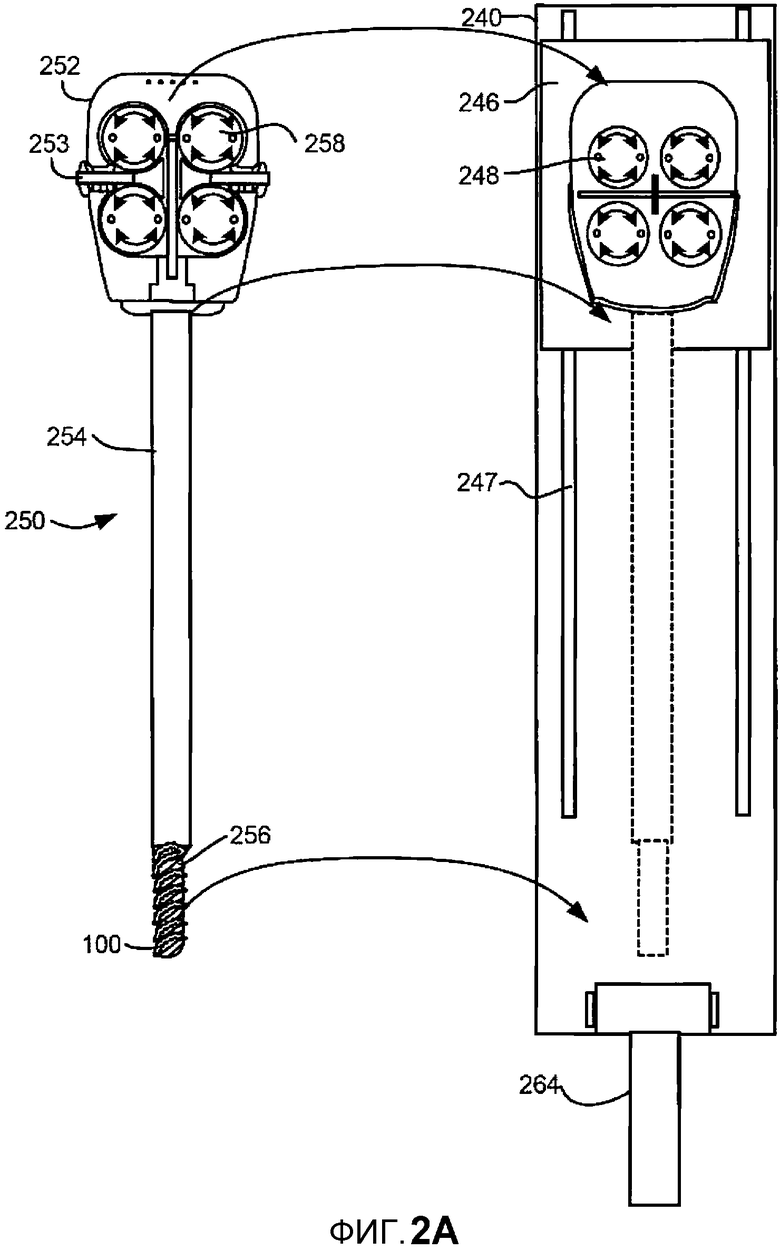

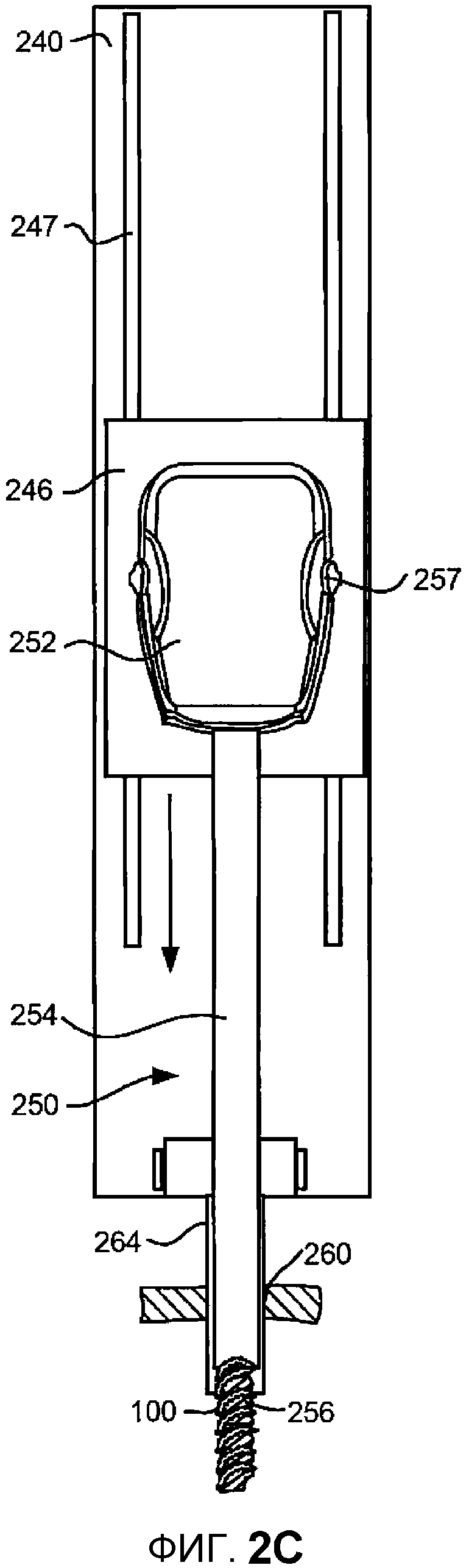
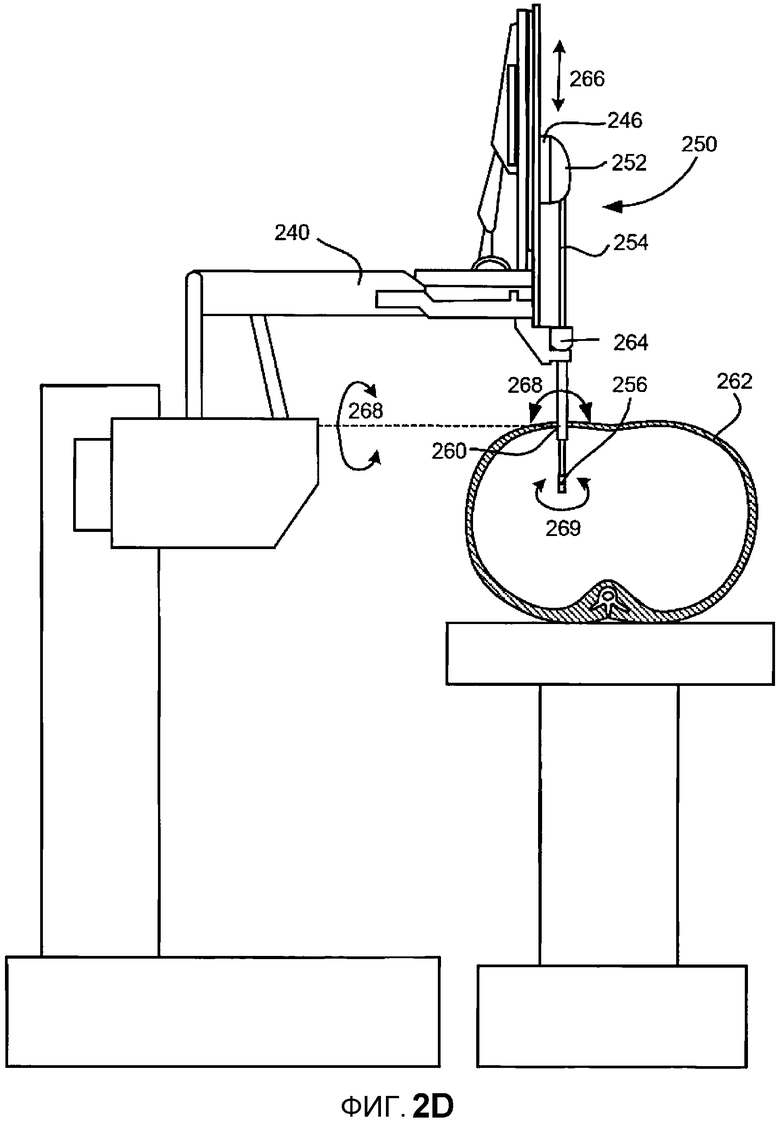
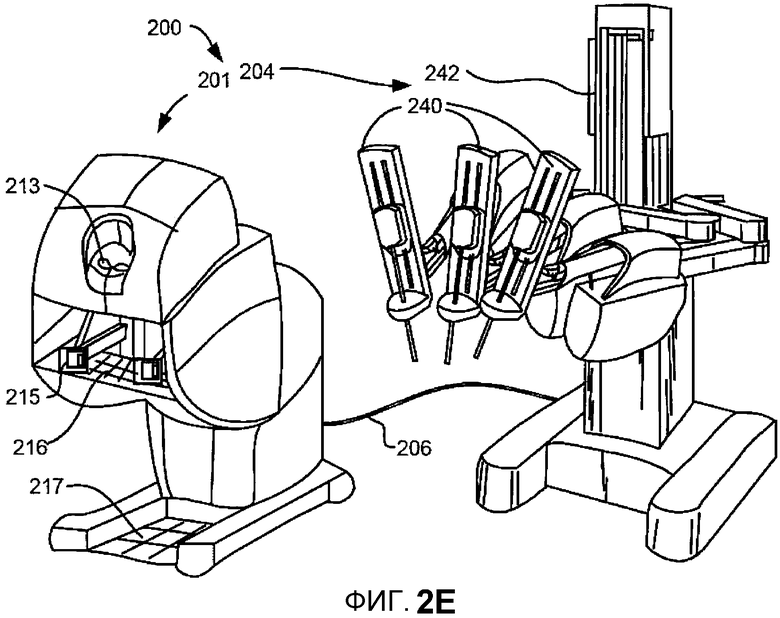
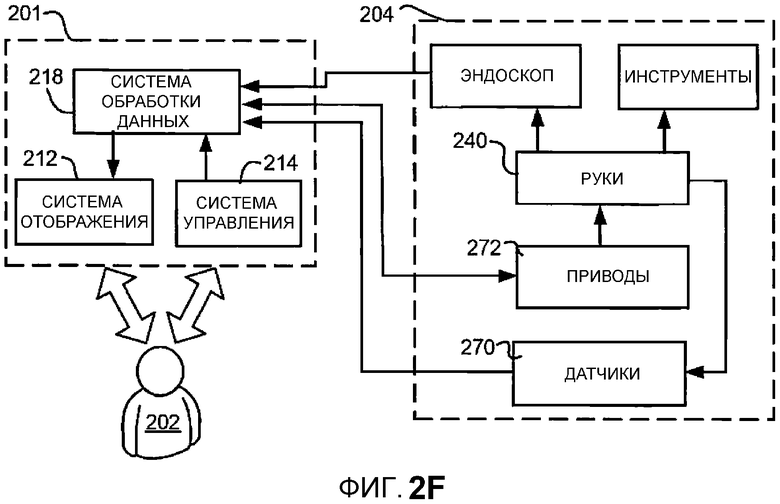
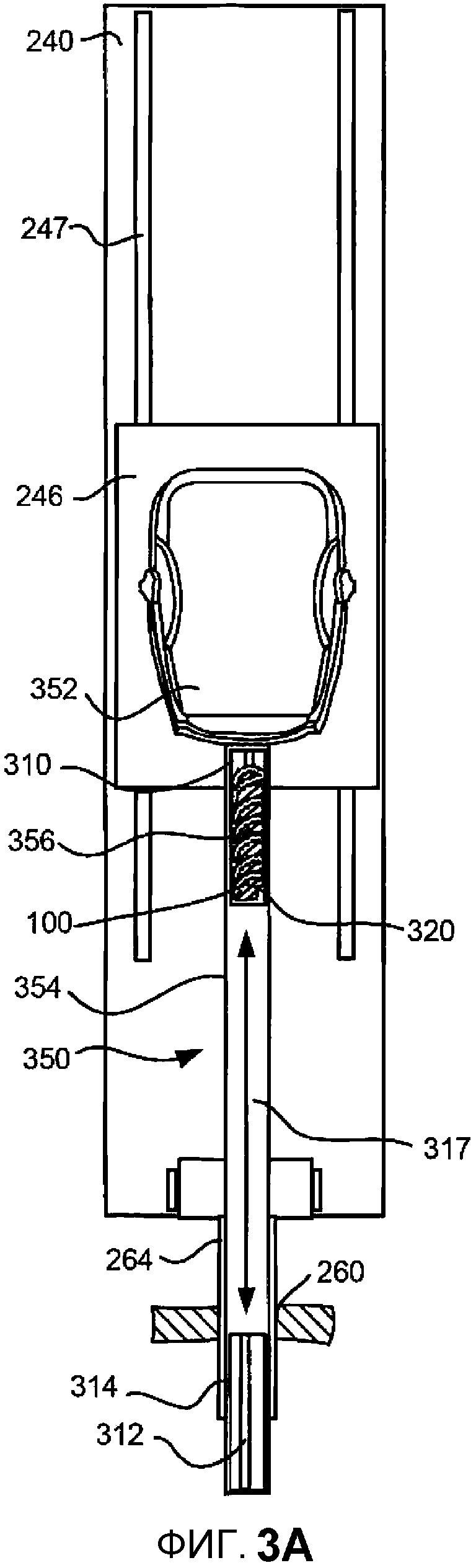
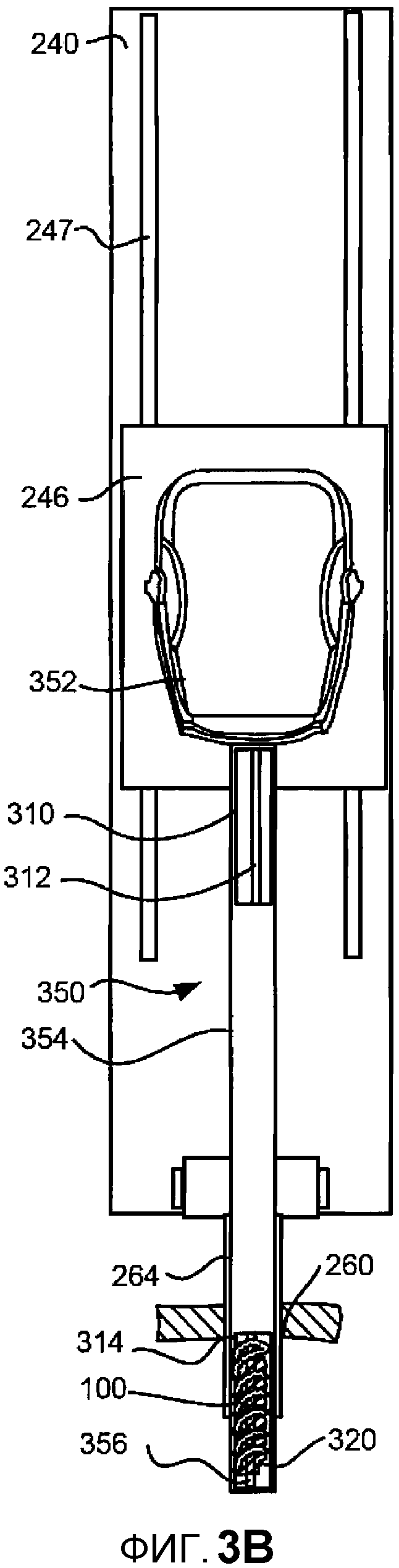
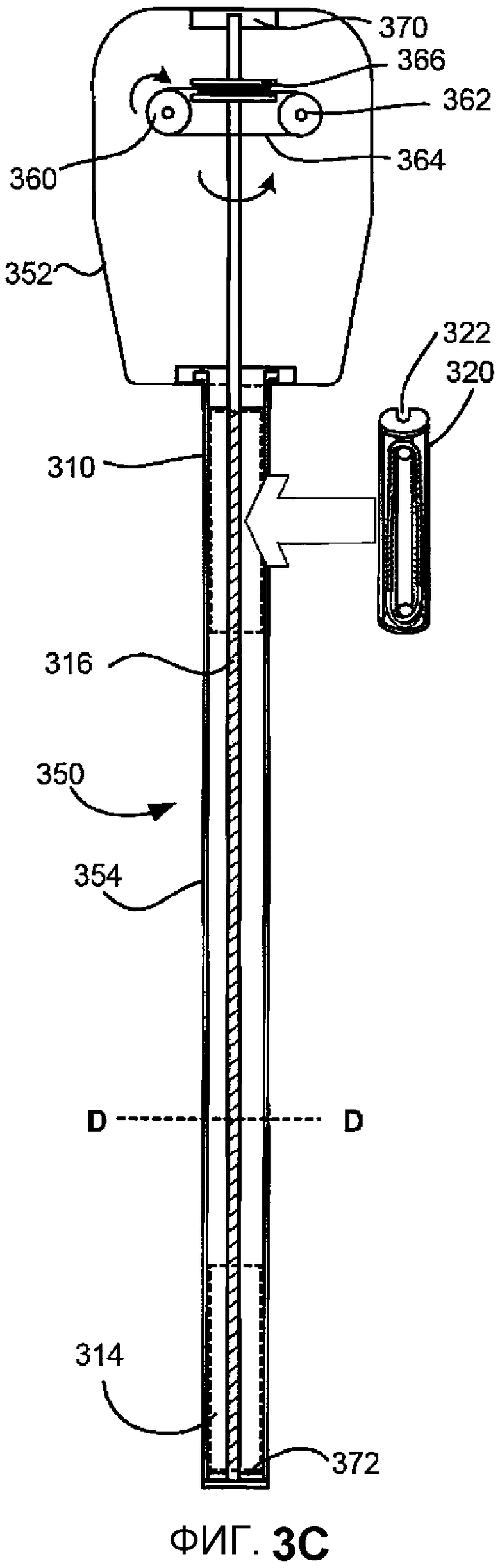
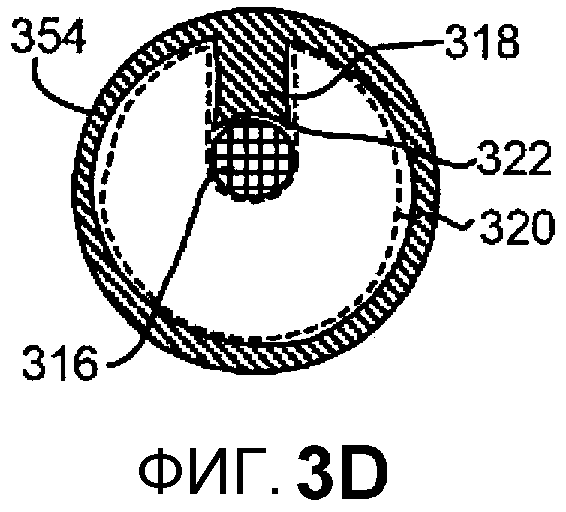
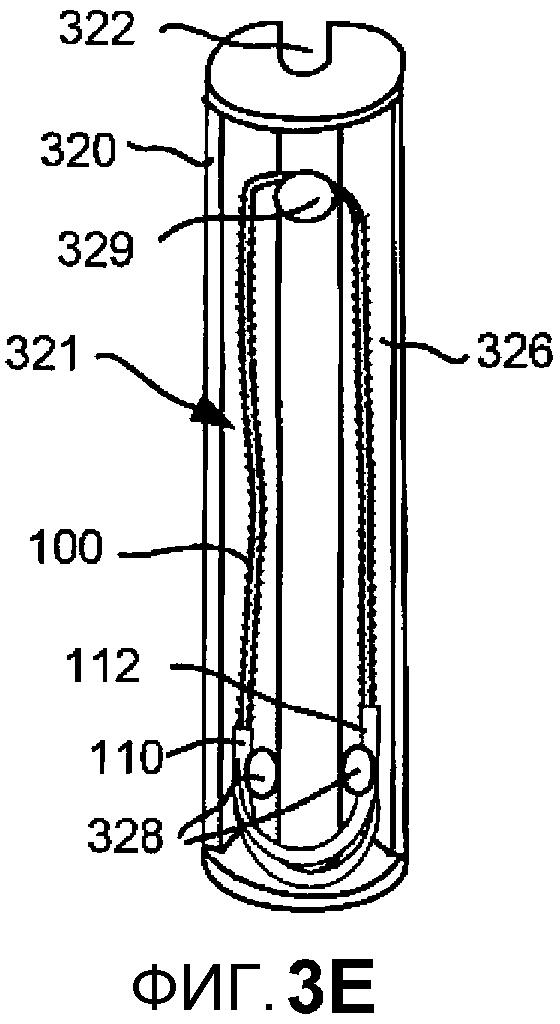
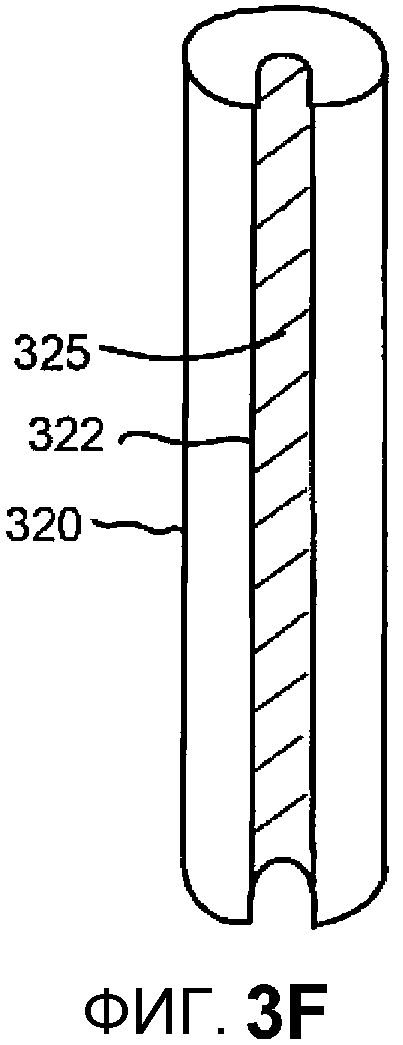
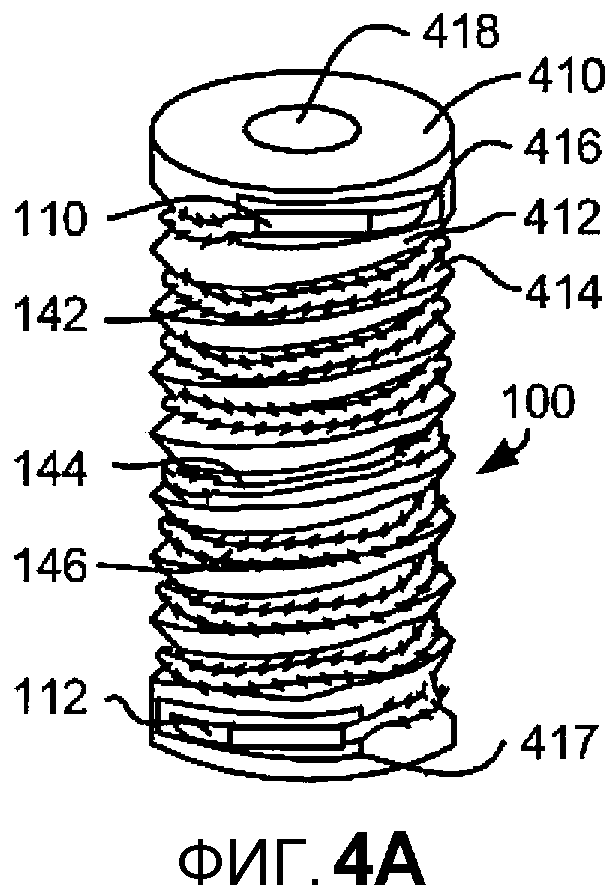
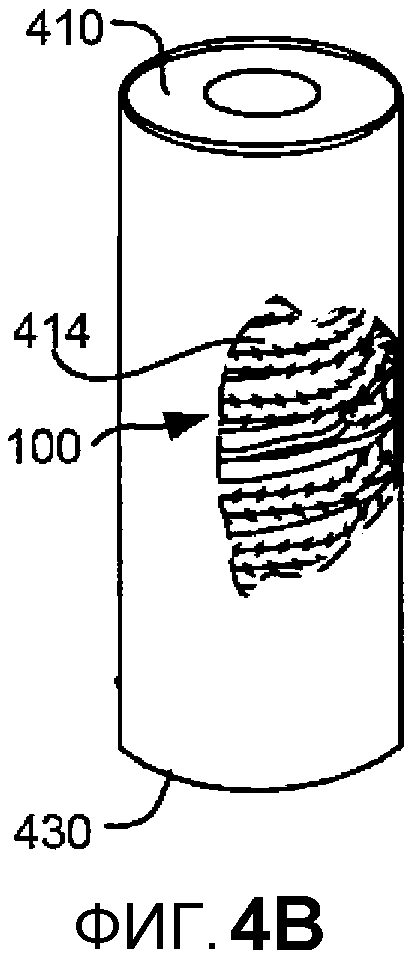
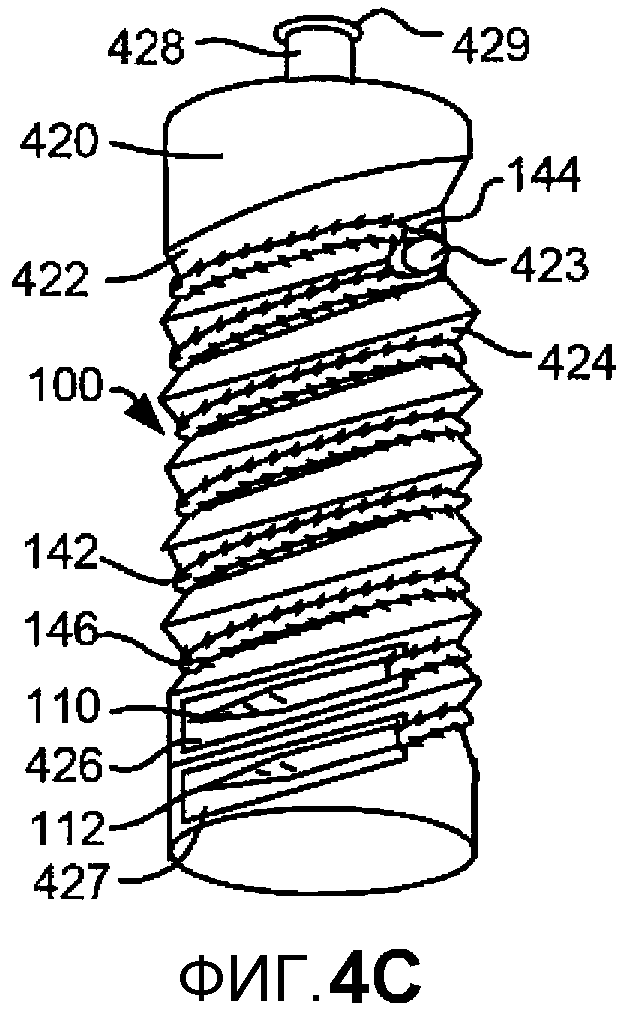
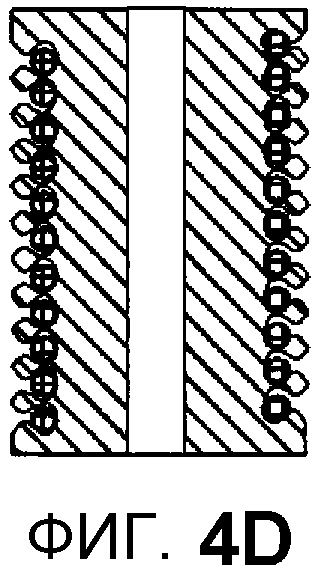
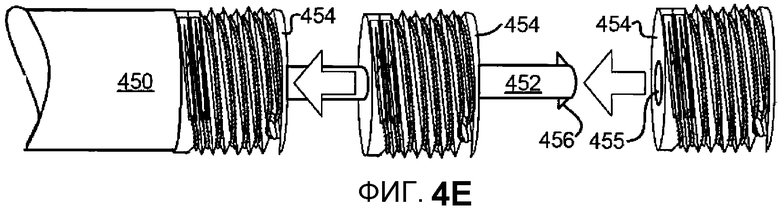
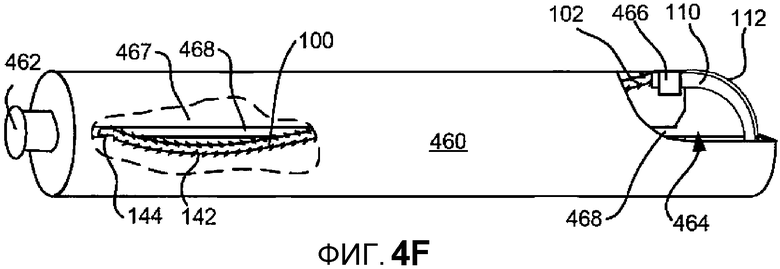
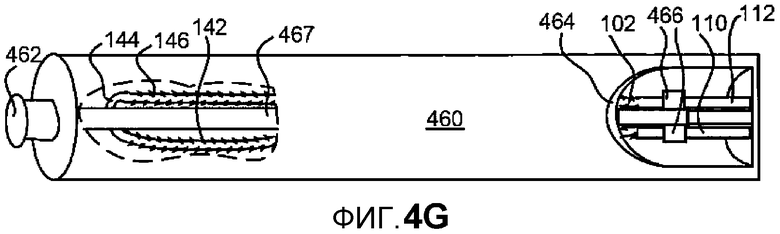
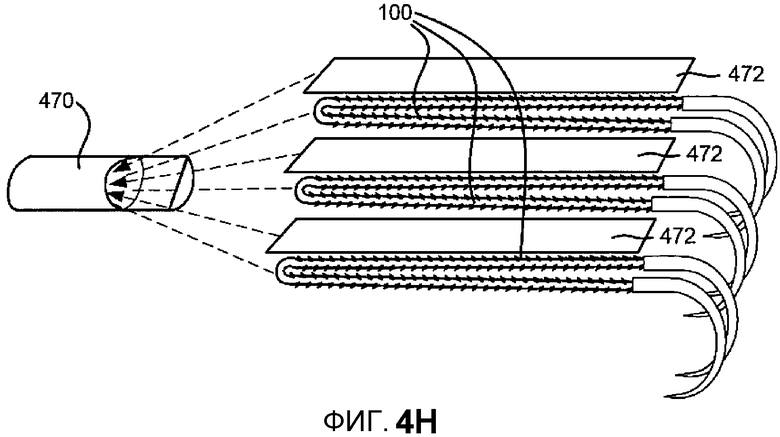
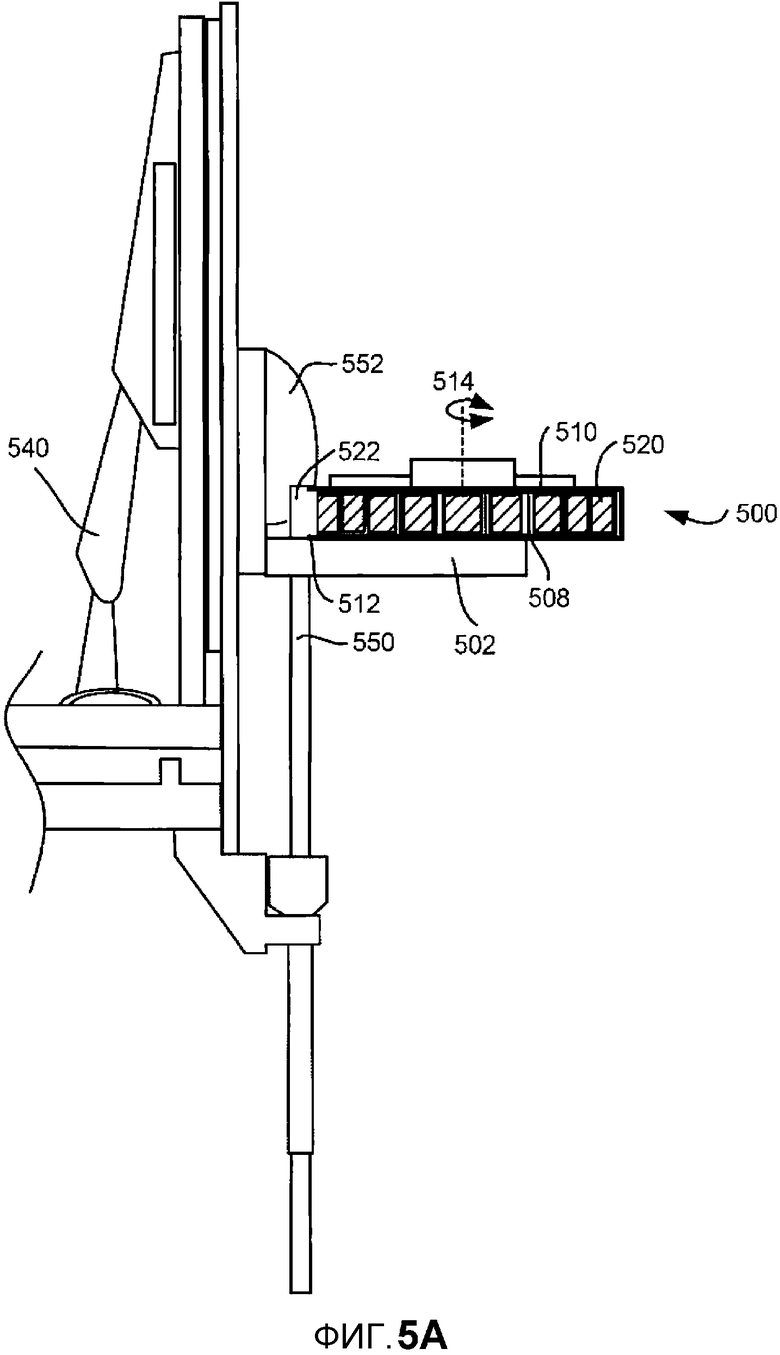
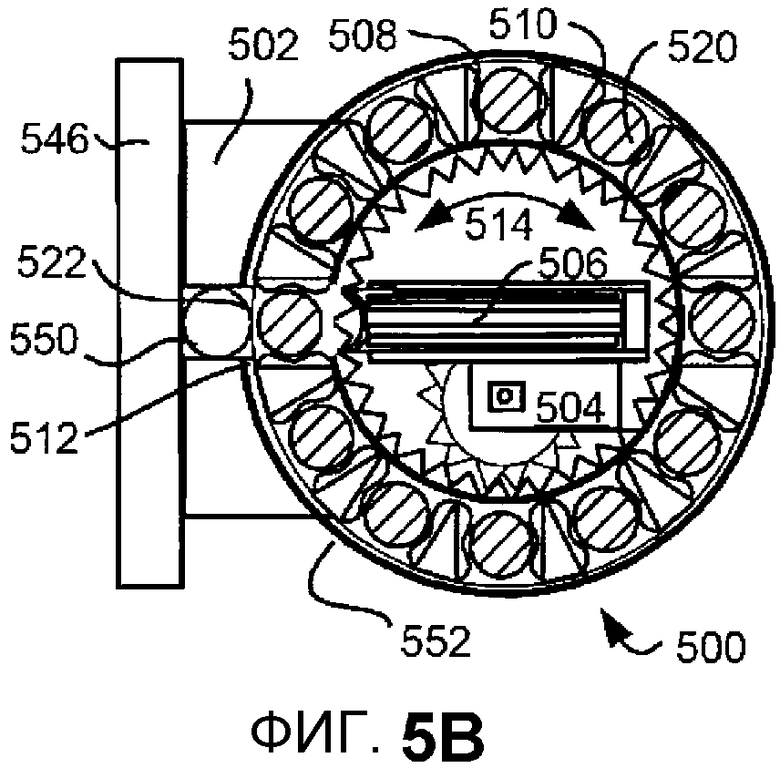
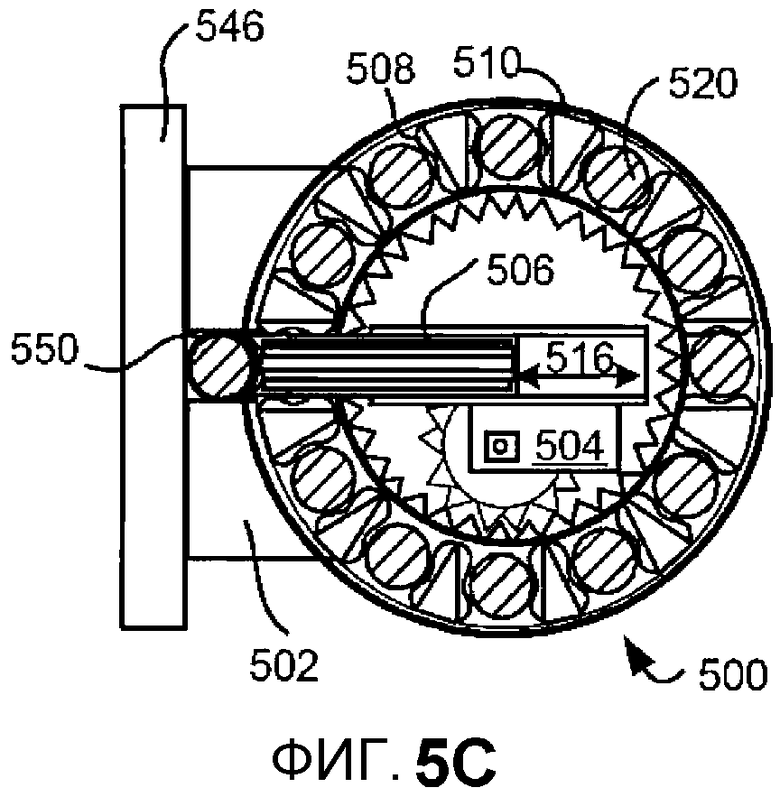
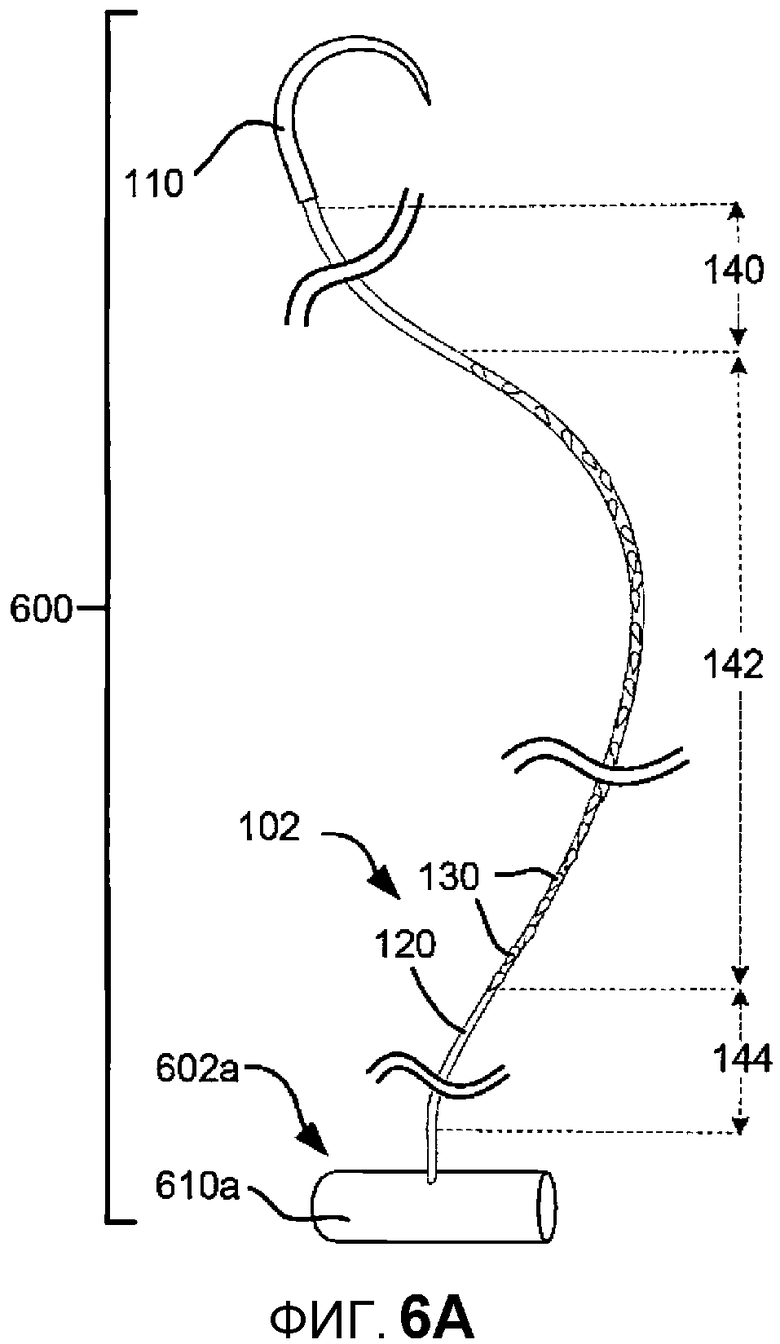
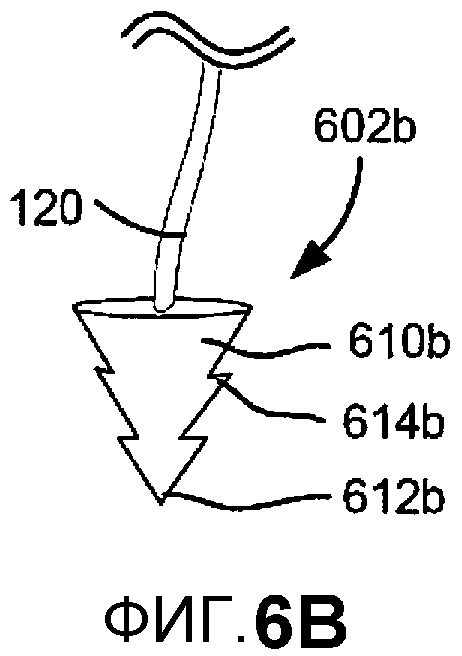
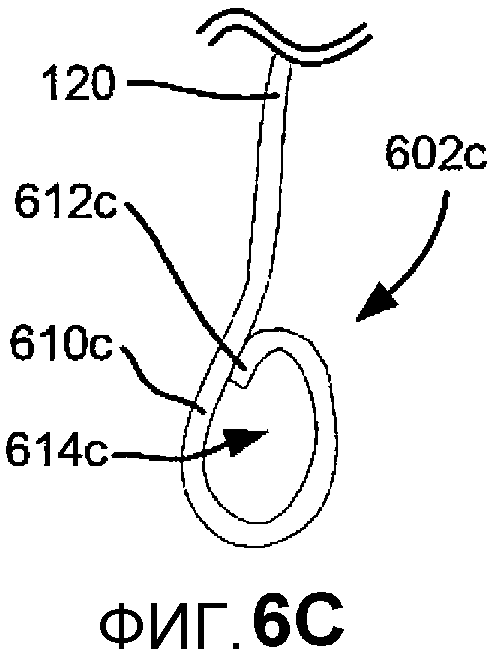
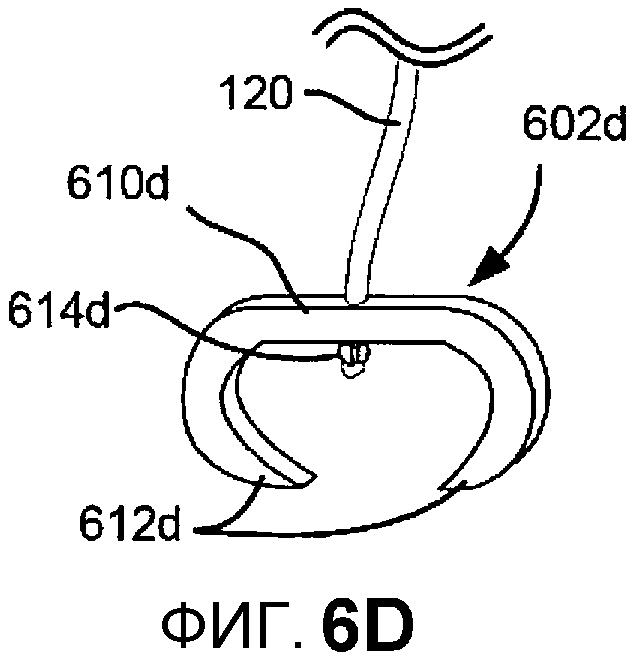
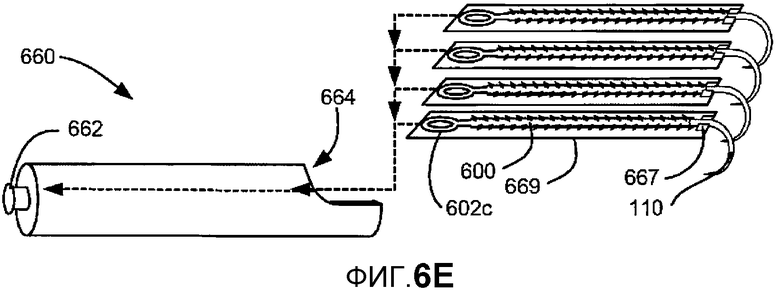
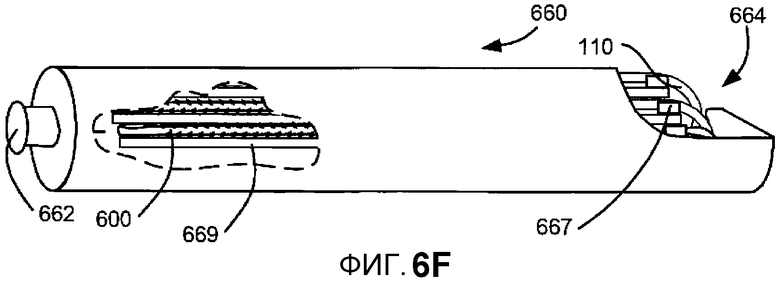
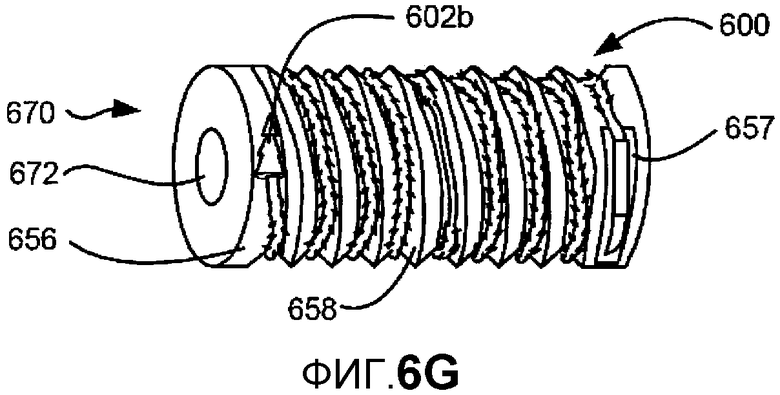
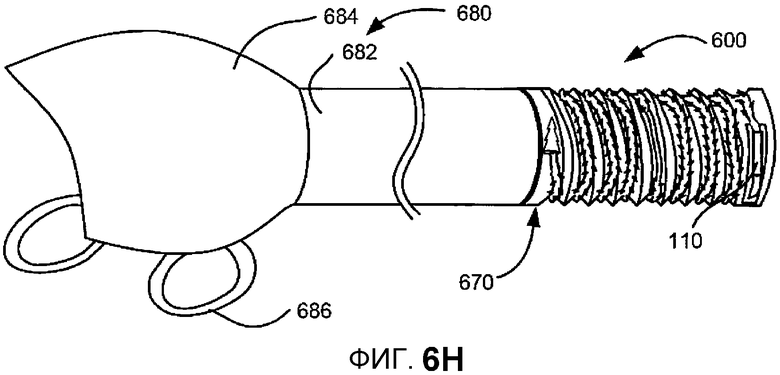
Изобретение относится к медицине. Система для доставки нити к месту операции в организме пациента эндоскопическим инструментом содержит множество картриджей, каждый из которых содержит нить и селектор картриджей. Селектор картриджей может выбрать картридж с выбранной нитью. Привод картриджа способен перемещать выбранный картридж по эндоскопическому инструменту и открывать выбранный картридж для доступа к самоудерживающейся нити в пределах места операции в организме пациента. Система обеспечивает доставку и удаление самоудерживающейся нити к месту операции в организме пациента через отверстие доступа. 2 н. и 9 з.п. ф-лы, 6 ил.
1. Система для доставки нити к месту операции в организме пациента эндоскопическим инструментом, содержащая:
множество картриджей, каждый из которых содержит нить; и
селектор картриджей, который может выбрать картридж с выбранной нитью;
привод картриджа, способный перемещать выбранный картридж по эндоскопическому инструменту и открывать выбранный картридж для доступа к самоудерживающейся нити в пределах места операции в организме пациента.
2. Система по п. 1, где:
самоудерживающаяся нить закреплена на катушке с возможностью удаления и содержит первую иглу на первом конце и вторую иглу на втором конце; и
катушка содержит первое гнездо для иглы для первой иглы и второе гнездо для иглы для второй иглы.
3. Система по п. 2, где катушка содержит множество изолированных областей под нить для пространственного отделения фиксаторов первого сегмента от фиксаторов второго сегмента.
4. Система по п. 2, где катушка соединена с возможностью удаления с дистальным концом удлиненного ствола, так что катушка выполнена с возможностью замены второй катушкой.
5. Система по п. 1, где устройство подачи нити обеспечено машиночитаемым кодом для идентификации характеристики самоудерживающейся нити.
6. Система по п. 1, где привод представляет собой опору, выполненную с возможностью установки устройства подачи нити по меньшей мере на одном из хирургических инструментов - на эндоскопическом хирургическом инструменте или на лапароскопическом хирургическом инструменте.
7. Система по п. 2, где катушка имеет диаметр приблизительно 12 мм или меньше.
8. Система по п. 1, выполненная в комбинации с системой дистанционной хирургии.
9. Система по п. 1, где указанное устройство подачи нити может принимать и подавать нить с множества катушек.
10. Система по п. 1, дополнительно содержащая хирургическое робототехническое устройство для позиционирования эндоскопического инструмента и, соответственно, позиционирования выбранного картриджа в организме пациента.
11. Способ малоинвазивной хирургии, использующий систему для доставки нити к месту операции в организме пациента эндоскопическим инструментом по п. 1, включающий:
доставку картриджа к месту операции, где каждый картридж включает в себя нить с элементами самофиксации и иглой;
доступ к картриджу при помощи эндоскопического инструмента;
использование эндоскопического инструмента для извлечения нити из картриджа;
использование эндоскопического инструмента для сшивания ткани при помощи нити.
| US 5478344 A, 26.12.1995 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Аппарат для ушивания тканей лигатурой | 1990 |
|
SU1725847A1 |
| УСТРОЙСТВО ДЛЯ СШИВАНИЯ ТКАНЕЙ | 1993 |
|
RU2076639C1 |
| СШИВАЮЩИЙ АППАРАТ С АТРАВМАТИЧЕСКИМИ ИГЛАМИ | 2004 |
|
RU2310405C2 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ ДИАГНОСТИКИ ОСТРОЙ ПОЧЕЧНОЙ НЕДОСТАТОЧНОСТИ И ФУНКЦИОНАЛЬНОЙ ОЛИГУРИИ | 1991 |
|
RU2007729C1 |

