Изобретение относится к ножке для операционного стола. Перед и во время операции пациента, расположенного на поверхности укладки пациента операционного стола, поверхность укладки пациента приводится в положение, которое облегчает вмешательство на пациенте. При этом может быть необходимым поворачивать поверхность укладки пациента вокруг горизонтальной оси на угол из большого углового диапазона. Также высота поверхности укладки пациента операционного стола должна иметь возможность регулировки в наибольшем диапазоне. В идеале операционный стол также делает возможными весьма незначительные высоты поверхности укладки пациента, что подразумевает компактную конструкцию колонны операционного стола.
В стационарных медицинских учреждениях, как правило, используются три различных типа операционных столов, а именно стационарные операционные столы, передвижные операционные столы и мобильные операционные столы. Стационарные операционные столы имеют неподвижно соединенную с полом операционной колонну операционного стола, причем они, как правило, не имеют ножку операционного стола и снабжаются энергией посредством жестко проложенного кабеля. Передвижные операционные столы имеют соединенную с колонной операционного стола ножку операционного стола, которая может иметь ролики, и отсоединяемую от колонны операционного стола и снова присоединяемую поверхность укладки пациента.
Ножки мобильных операционных столов имеют ролики для перемещения операционного стола, так что они без дополнительных вспомогательных средств могут перемещаться и подходят для транспортировки пациента. Во время же вмешательства на пациенте должно быть обеспечено устойчивое положение операционного стола. У простых операционных столов это происходит посредством стопорения нескольких транспортных роликов, в то время как у высококачественных операционных столов опускается шасси ножки операционного стола, так что он опирается на пол. Для этого транспортные ролики встроены в ножку операционного стола с возможностью регулировки в вертикальном направлении и могут перемещаться вниз настолько, что контакт шасси с полом прекращается, и операционный стол располагается на транспортных роликах.
Помимо этого, у мобильных операционных столов поверхность укладки пациента, как правило, неподвижно соединена с колонной операционного стола и при эксплуатации в больницах не отсоединяется от колонны операционного стола. Кроме того, могут использоваться электрические приводы движения, предпочтительно с плавным стартом и функцией безопасного торможения, для того чтобы перемещать мобильный операционный стол при помощи электрического привода движения. Как у стационарных операционных столов, так и у передвижных операционных столов и у мобильных операционных столов могут быть предусмотрены регулируемые электродвигателями компоненты, как например регулируемая электродвигателем по своей длине колонна операционного стола для изменения высоты расположенной на колонне операционного стола поверхности укладки пациента, регулируемая в двух ортогональных осях головка колонны операционного стола для изменения наклона и расположения краев соединенной с головкой колонны операционного стола поверхности укладки пациента и/или регулируемые электродвигателями компоненты поверхности укладки пациента.
Известны мобильные ножки операционных столов с четырьмя встроенными транспортными роликами, имеющие на каждом транспортном ролике гидравлический цилиндр, а также общий управляющий клапан для вертикальной регулировки соответствующего транспортного ролика. Недостатком, который проистекает из использования гидравлических цилиндров, являются относительно высокие расходы и относительно большое вертикальное монтажное пространство. Тем не менее, низкая (плоская) конструкция ножки операционного стола является желательной по причинам удобства доступа. Если перемещению операционного стола должно оказываться содействие при помощи электродвигательного привода движения, то для опускания привода движения на пол и для поднятия привода движения с пола требуется дополнительный гидравлический цилиндр и дополнительный управляющий клапан.
Задача изобретения состоит в предоставлении ножки операционного стола, которая при простой структуре делает возможной низкую конструкцию, и которая требует меньших затрат. Эта задача решается с помощью ножки операционного стола с признаками пункта 1 формулы изобретения. Предпочтительные усовершенствования изобретения обозначены в зависимых пунктах формулы изобретения.
Соответствующая изобретению ножка операционного стола имеет, по меньшей мере, два выдвижных транспортных ролика, причем операционный стол в убранном положении транспортных роликов стоит на, по меньшей мере, одном опорном элементе операционного стола, и операционный стол в выдвинутом положении транспортных роликов может передвигаться на транспортных роликах. Ножка операционного стола имеет первый механический установочный блок, при помощи которого может изменяться положение первого транспортного ролика, по меньшей мере, с убранного положения на выдвинутое положение. Кроме того, она имеет второй механический установочный блок, при помощи которого может изменяться положение второго транспортного ролика, по меньшей мере, с убранного положения на выдвинутое положение. Первый установочный блок и второй установочный блок могут приводиться в движение при помощи приводного блока. Приводной блок соединен с первым и со вторым установочным блоком при помощи механического соединительного средства.
В убранном положении транспортных роликов они не служат опорой для операционного стола или служат лишь в незначительной степени. В выдвинутом положении транспортных роликов транспортные ролики и при необходимости другие ролики воспринимают вес операционного стола. В частности говорится о выдвинутых транспортных роликах, если транспортные ролики выступают снизу из шасси или корпуса ножки операционного стола. Вместо отдельных транспортных роликов в каждом случае может использоваться соединение транспортных роликов, которое включает в себя, по меньшей мере, два транспортных ролика.
В выдвинутом положении транспортных роликов операционный стол поддерживается ими и может перемещаться или кататься на транспортных роликах. Ножка операционного стола может иметь дополнительные транспортные ролики с или без собственного установочного блока для выдвигания транспортных роликов. В этом случае не выдвигаемые транспортные ролики постоянно выступают из шасси или корпуса ножки операционного стола.
Преимуществом соответствующей изобретению ножки операционного стола по сравнению с уровнем техники являются простая конструкция и более экономичное изготовление. В частности для выдвигания транспортных роликов соответственно не для каждого транспортного ролика требуется собственный привод, а требуется лишь единственный привод для всех транспортных роликов. Также можно отказаться от дорогостоящих гидравлических блоков, которые являются общепринятыми в уровне техники. Дополнительным преимуществом по сравнению с уровнем техники является более гибкая возможность расположения приводного блока, вследствие чего возможна меньшая конструктивная высота ножки операционного стола по сравнению с известными ножками операционных столов с выдвижными транспортными роликами.
В предпочтительном усовершенствованном варианте изобретения первый и второй установочные блоки соединены с приводным блоком при помощи цепи или ремня. Преимущество этого усовершенствования заключается в том, что может использоваться простое, экономичное и надежное соединительное средство. Также приводной блок может гибко адаптироваться к соответствующим, конструктивным, имеющимся условиям ножки операционного стола. Наиболее предпочтительно, если ремень выполнен в виде зубчатого ремня. Это также создает условия для надежного зацепления зубчатого ремня с установочными блоками, как в случае с цепью, причем зубчатый ремень можно устанавливать без необходимости технического обслуживания и просто.
Кроме того, предпочтительно, если цепь или ремень, в частности с элементами приводного блока, образует замкнутую силовую передачу. Под замкнутой силовой передачей понимается силовая передача без начальной и конечной точки. Частным случаем этого является кольцо. Преимущество этого кольцеобразного исполнения заключается в том, что соединительное средство может оказывать усилие на установочные блоки по направлению часовой стрелки и против направления часовой стрелки. Это может использоваться для того, чтобы при приведении в движение соединительного средства переводить транспортные ролики в первом направлении из убранного положения в выдвинутое положение и в противоположном направлении из выдвинутого положения в убранное положение.
Кроме того, предпочтительно, если первый приводной блок включает в себя электродвигатель, который через ступень передачи приводит в движение винтовую гайку винтовой передачи, если внутренняя резьба винтовой гайки находится в зацеплении с внешней резьбой резьбового стержня, если винтовая гайка неподвижна в направлении продольной оси резьбового стержня и установлена с возможностью вращения вокруг продольной оси резьбового стержня, если первый конец резьбового стержня соединен с первым концом на первом конце цепи или ремня, и если второй конец резьбового стержня соединен со вторым концом цепи или ремня. Альтернативно этому первый приводной блок включает в себя цилиндр синхронного хода с первым поршневым штоком и вторым поршневым штоком. При этом свободный конец первого поршневого штока соединен с первым концом цепи или ремня, а свободный конец второго поршневого штока со вторым концом цепи или ремня.
При этом под неподвижной винтовой гайкой в частности понимается то, что винтовая гайка не может смещаться. При этом аналогично неподвижной установке может также говориться об установке без возможности поступательного движения. При помощи этого усовершенствования возможно то, что цепь или ремень выполняет поступательное движение. При выполнении наружной стороны винтовой гайки в виде зубчатого колеса эта наружная сторона может находиться в зацеплении с выходным валом приводного блока, который предпочтительно выполнен в виде электродвигателя. Предпочтительно ступень передачи выполнена в виде червячной передачи. Винтовая передача, которая опосредованно приводится в действие приводным блоком, преобразует вращательное движение приводного блока в поступательное движение цепи, ремня или другого соединительного средства. Преимуществом этого варианта осуществления являются малый монтажный объем и возможность точной регулировки поступательного движения механического соединительного средства.
Далее наиболее предпочтительно, если механическое соединительное средство находится в зацеплении с первым зубчатым колесом или сегментом зубчатого колеса первого установочного блока и со вторым зубчатым колесом или сегментом зубчатого колеса второго установочного блока, причем при движении находящегося в зацеплении с зубчатыми колесами соединительного средства осуществляется поворот зубчатых колес, и благодаря повороту зубчатых колес транспортные ролики могут переводиться из убранного в выдвинутое положение и из выдвинутого в убранное положение. При этом установочные блоки предпочтительно выполнены таким образом, что поворот соответствующего зубчатого колеса или сегмента зубчатого колеса на угол в диапазоне от 20° до 180° переводит транспортные ролики из убранного в выдвинутое положение. При этом наиболее предпочтительным угловым диапазоном является диапазон от 30 до 120°.
Преимущество указанного выше варианта осуществления заключается в том, что благодаря выбору зубчатого колеса или сегмента зубчатого колеса обеспечено надежное соединение между механическим соединительным средством и установочными блоками. Это происходит в частности при использовании цепи или зубчатого ремня в качестве соединительного средства. Кроме того, эти замкнутые соединительные средства можно просто приводить в движение лишь одним приводным блоком. Благодаря использованию зубчатых колес или сегментов зубчатых колес усилие может просто передаваться на установочные блоки.
В дополнительном предпочтительном варианте осуществления данного изобретения первый установочный блок имеет первую расположенную вертикально опорную цапфу с первой вертикальной продольной осью и первую направляющую цапфы для направления относительного движения между первой направляющей цапфы и первой опорной цапфой в вертикальном направлении. Первый установочный блок имеет, по меньшей мере, один первый установочный элемент с первой наклонной поверхностью, с которой первый элемент зацепления первой направляющей цапфы находится в таком зацеплении, что при относительном движении первого элемента зацепления вдоль первой наклонной поверхности осуществляется поступательное установочное движение первого установочного элемента. Сверх этого, второй установочный блок имеет вторую направляющую цапфы со второй продольной осью для направления относительного движения между второй направляющей цапфы и второй опорной цапфой в вертикальном направлении. Второй установочный блок имеет, по меньшей мере, один второй установочный элемент со второй наклонной поверхностью, с которой второй элемент зацепления второй направляющей цапфы находится в таком зацеплении, что при относительном движении второго элемента зацепления вдоль второй наклонной поверхности осуществляется поступательное установочное движение второго установочного элемента.
При этом под установочным движением понимается движение для вдвигания и выдвигания транспортных роликов. При этом вдвигание транспортных роликов изменяет положение с выдвинутого положения на убранное положение, а выдвигание изменяет положение с убранного положения на выдвинутое положение. Соответственно во время установочного движения осуществляется движение установочного элемента вокруг продольной оси соответствующей опорной цапфы, вдоль проходящей вокруг этой продольной оси наклонной поверхности с наклоном по отношению к горизонтали. Наклонная поверхность может быть выполнена, например, в виде отрезка внешней или внутренней резьбы. Предпочтительно используются две наклонные поверхности, которые расположены со смещение друг относительно друга на угол в 180°. Наиболее предпочтительно, если используются три смещенные на угол в 120° наклонные поверхности в каждом случае с одним элементом зацепления. Преимущество этого усовершенствования заключается в том, что наклон наклонных поверхностей может адаптироваться к силе тяжести операционного стола. Если используются три наклонные поверхности в каждом случае с одним элементом зацепления, то помимо этого транспортные ролики удерживаются в устойчивом положении.
Дополнительное предпочтительное усовершенствование заключается в том, что верхний конец первой опорной цапфы имеет соединительную область, при помощи которой первая опорная цапфа прочно соединена с шасси ножки операционного стола, что верхний конец второй опорной цапфы имеет соединительную область, при помощи которой вторая опорная цапфа прочно соединена с шасси ножки операционного стола, что первый установочный элемент первого установочного блока установлен с возможностью вращения вокруг первой продольной оси, и что второй установочный элемент второго установочного блока установлен с возможностью вращения вокруг второй продольной оси. Сверх этого, первый установочный элемент и второй установочный элемент соединены с первым приводным блоком при помощи механического соединительного средства таким образом, что они поворачиваются вокруг продольной оси соответствующей опорной цапфы при приведении в движение первым приводным блоком, что первая наклонная поверхность опирается на первый элемент зацепления при изменении положения первого транспортного ролика, что вторая наклонная поверхность опирается на второй элемент зацепления при изменении положения второго транспортного ролика, что первый элемент зацепления скользит по первой наклонной поверхности, или первый элемент зацепления имеет ролик, который прокатывается по первой наклонной поверхности, что второй элемент зацепления скользит по второй наклонной поверхности, или второй элемент зацепления имеет ролик, который прокатывается по второй наклонной поверхности, что положение первого транспортного ролика может изменяться благодаря повороту первого установочного элемента, и что положение второго транспортного ролика может изменяться благодаря повороту второго установочного элемента.
Если установочные элементы в каждом случае имеют зубчатое колесо или сегмент зубчатого колеса для соединения с механическим соединительным средством, то предпочтительно, если зубья зубчатого колеса или сегмента зубчатого колеса выполнены на внешней стороне соответствующего установочного элемента. Вследствие этого механическое соединительное средство, предпочтительно цепь или зубчатый ремень, может быть выполнено таким образом, что оно расположено, проходя по замкнутому периметру вокруг установочных элементов. Это делает возможной простую сборку ножки операционного стола. Наклонная поверхность может иметь первый участок с одним наклоном и в частности, по меньшей мере, один второй участок с другим наклоном, отличным от наклона первого участка. Таким образом, ход движения выдвигания или вдвигания транспортных роликов зависит от характера наклона и от приводного движения приводного блока и может изменяться благодаря им.
Предпочтительно в выдвинутом положении транспортных роликов весом операционного стола не оказывается усилие на механическое соединительное средство. Вследствие этого соединительное средство и приводной блок могут выполняться проще. В частности не должны предусматриваться средства для фиксации транспортных роликов в выдвинутом положении.
Предпочтительно к наклонным поверхностям соответствующих установочных элементов с наклонами больше чем в 0° в каждом случае прилегает поверхность уровня с наклоном в 0°. Предпочтительно исходные данные наклона, а также исходные данные градусов относятся в каждом случае к горизонтали или к плоскости, ортогональной к направлению поступательного установочного движения транспортных роликов из убранного в выдвинутое положение или из выдвинутого в убранное положение, так что наклон в 0° не имеет наклона по отношению к ортогональной плоскости. При этом вызванное приводным блоком установочное движение механического соединительного средства выполняется приводным блоком, по меньшей мере, при выдвигании транспортных роликов до тех пор, пока элементы зацепления в каждом случае не войдут в зацепление с горизонтальной поверхностью уровня, в частности пока не будут расположены под нею. Тем самым весом операционного стола не оказывается усилие на механическое соединительное средство, и операционный стол находится в устойчивом положении. Дополнительное преимущество заключается в том, что операционный стол не должен удерживаться первым приводным блоком в этом положении.
Далее предпочтительно, если, по меньшей мере, один первый направляющий палец первой направляющей цапфы установлен таким образом в первом соответствующем направляющему пальцу отверстии ножки операционного стола, что первая направляющая цапфы установлена без возможности поворота вокруг первой продольной оси, и, по меньшей мере, один второй направляющий палец второй направляющей цапфы установлен таким образом во втором соответствующем второму направляющему пальцу отверстии ножки операционного стола, что вторая направляющая цапфы установлена без возможности поворота вокруг второй продольной оси. Благодаря этому предпочтительному усовершенствованию обеспечено то, что соответствующие элементы зацепления не вращаются совместно с вращательным движением соответствующего установочного элемента. Благодаря использованию направляющих пальцев обеспечено то, что шасси ножки операционного стола может перемещаться по отношению к направляющей цапфы.
В дополнительном предпочтительном усовершенствовании изобретения первый установочный элемент и первая направляющая цапфы расположены соосно вокруг первой опорной цапфы, а второй установочный элемент и вторая направляющая цапфы соосно вокруг второй опорной цапфы. Вследствие этого возможна весьма компактная конструкция установочных элементов.
Далее предпочтительно, если первый установочный блок имеет первый держатель транспортного ролика и первую опору, причем первая опора расположена между первой направляющей цапфы и первым держателем транспортного ролика, так что первый держатель транспортного ролика с первым транспортным роликом установлен с возможностью поворота вокруг вертикальной оси, и второй установочный блок имеет второй держатель транспортного ролика и вторую опору, причем вторая опора расположена между второй направляющей цапфы и вторым держателем транспортного ролика, так что второй держатель транспортного ролика со вторым транспортным роликом установлен с возможностью поворота вокруг вертикальной оси. Говоря о вертикальной оси, речь предпочтительно идет о первой или второй продольной оси опорной цапфы. Благодаря этому расположению транспортные ролики, которые удерживаются соответствующим держателем транспортного ролика, могут предпочтительно поворачиваться вокруг вертикальной оси и выравниваться таким образом, как того требует желаемое направление перемещения ножки операционного стола.
Кроме того, предпочтительно, если посредством первого установочного блока отдельно удерживается и направляется, по меньшей мере, первый транспортный ролик, или если посредством первого установочного блока удерживается и направляется первое соединение транспортных роликов, состоящее, по меньшей мере, из двух транспортных роликов. Далее предпочтительно, если посредством второго установочного блока удерживается и направляется, по меньшей мере, второй транспортный ролик, или если посредством второго установочного блока удерживается и направляется второе соединение транспортных роликов, состоящее, по меньшей мере, из двух транспортных роликов. Вследствие этого возможно простое соединение между транспортными роликами и операционным столом.
Далее предпочтительно, если, по меньшей мере, один приводимый в движение при помощи второго приводного блока приводной ролик согласован с приводимым в действие первым приводным блоком через механическое соединительное средство опускным блоком, при помощи которого приводной ролик может поворачиваться из исходного положения в откинутое положение и/или из откинутого положения в исходное положение. Преимущество этого усовершенствованного варианта заключается в том, что не требуется дополнительный привод для откидывания и убирания приводного ролика.
В дополнительном предпочтительном усовершенствовании приводной блок на первом этапе изменяет положение транспортных роликов с убранного положения на выдвинутое положение, а на втором этапе изменяет положение приводного ролика с убранного на выдвинутое положение. Это происходит посредством непрерывного приведения в действие первого приводного блока в движение в частности во вращение. Вследствие этого предпочтительно предотвращается то, что пользователь откидывает приводной ролик, без того чтобы транспортные ролики были в выдвинутом положении.
Сверх этого, предпочтительно, если опускной блок имеет ступенчатый управляющий профиль с, по меньшей мере, одной ступенью, причем ступень соединяет первую и вторую поверхность ступени, причем управляющий профиль соединен механически неподвижно с резьбовым стержнем, и управляющий профиль может с ним совместно передвигаться. С управляющим профилем находится в зацеплении исполнительный элемент, так что при движении резьбового стержня управляющий профиль проводится мимо исполнительного элемента, и исполнительный элемент проскальзывает по первой ступени. При этом посредством исполнительного элемента при движении, по меньшей мере, по одной ступени управляющего профиля осуществляется установочное движение приводного ролика из откинутого в исходное положение или из исходного в откинутое положение.
Альтернативно исполнительный элемент может быть неподвижно соединен с резьбовым стержнем и может перемещаться мимо управляющего профиля на исполнительном элементе. Предпочтительно исполнительный элемент располагается, а поверхности ступени управляющего профиля выполняются таким образом, что откидывание приводного ролика осуществляется лишь в том случае, если транспортные ролики находятся в выдвинутом положении, и дополнительное перемещение соединительного средства больше не вызывает дополнительное выдвигание транспортных роликов. Чисто механическая реализация этого механизма переключения предпочтительно делает ненужными для этой задачи электронные элементы переключения и управления.
Кроме того, предпочтительно, если опускной блок имеет пружину, которая при помощи усилия прижатия прижимает приводной ролик по направлению к полу. Вследствие этого предпочтительно обеспечивается то, что приводной ролик даже на неровной поверхности пола делает возможным равномерное поступательное движение ножки операционного стола при моторном приводе приводного ролика.
Наиболее предпочтительно, если ножка операционного стола наряду с первым и вторым установочным блоком также включает в себя третий и четвертый установочный блок в каждом случае с одним согласованным транспортным роликом или одним согласованным соединением транспортных роликов. В этом случае все четыре транспортных ролика могут одновременно выдвигаться и вдвигаться посредством приведения в действие механическим соединительным средством при помощи лишь одного приводного блока. Вследствие этого операционный стол плавно и одновременно поднимается и/или опускается вне зависимости от распределения нагрузки на операционном столе. Вследствие этого возможно манипулирование операционным столом, которое является комфортным в частности для пациента, лежащего на поверхности укладки пациента операционного стола.
Дополнительные признаки и преимущества изобретения проистекают из последующего описания, которое разъясняет изобретение более подробно посредством примеров осуществления в сочетании с прилагаемым чертежом.
На чертеже показаны:
фиг. 1 - схематичное изображение операционного стола с ножкой операционного стола согласно первому варианту осуществления изобретения;
фиг. 2 - подробный вид сверху в перспективе на шасси ножки операционного стола с первым приводным блоком и расположенной на шасси цепью для приведения в действие четырех установочных блоков;
фиг. 3 - расположение согласно фиг. 2 без шасси, причем изображены: первый приводной блок и четыре находящихся в зацеплении с цепью установочных блока для установки (перемещения) в каждом случае одного соединения транспортных роликов, состоящего в каждом случае из двух транспортных роликов;
фиг. 4 - фрагмент расположения согласно фиг. 3;
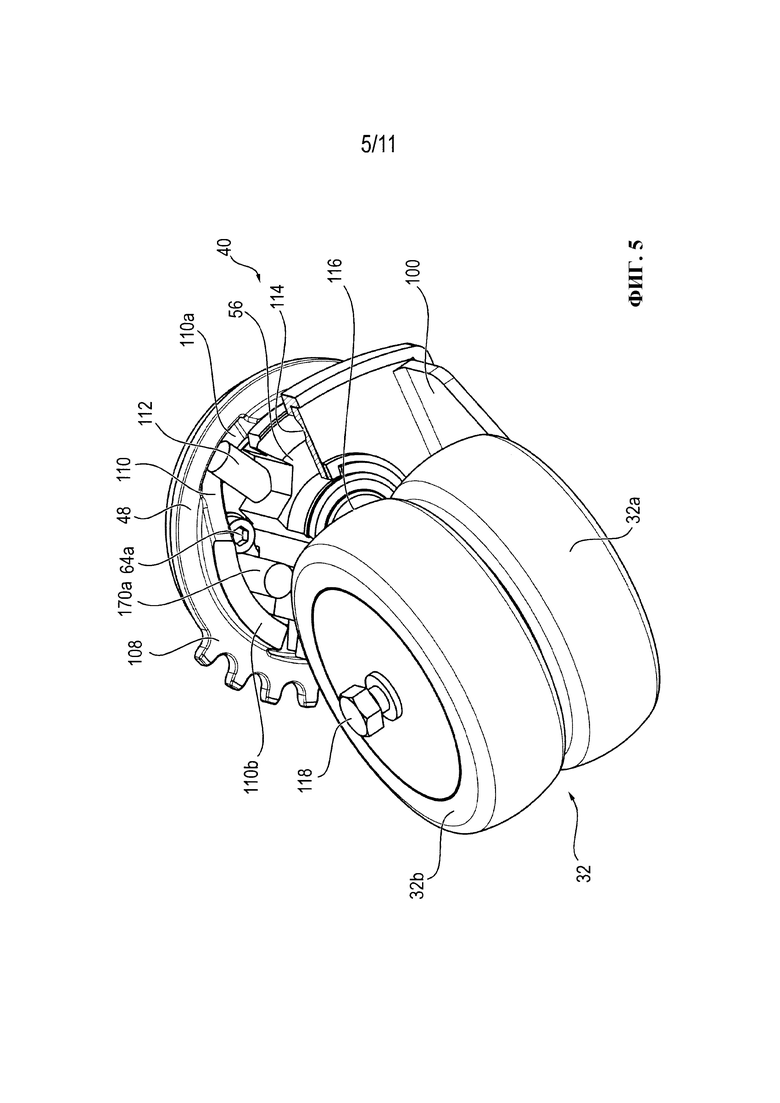
фиг. 5 - подробный вид снизу в перспективе на первый установочный блок;
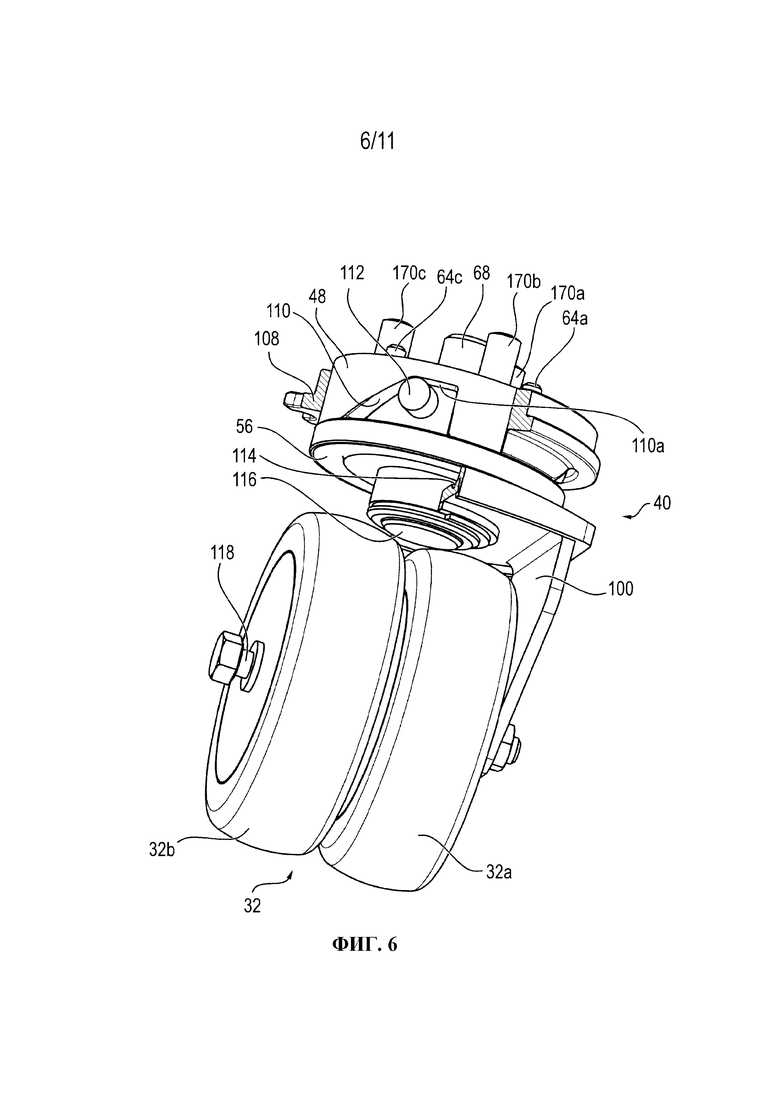
фиг. 6 - подробный вид сбоку в перспективе на первый установочный блок в убранном положении первого соединения транспортных роликов;
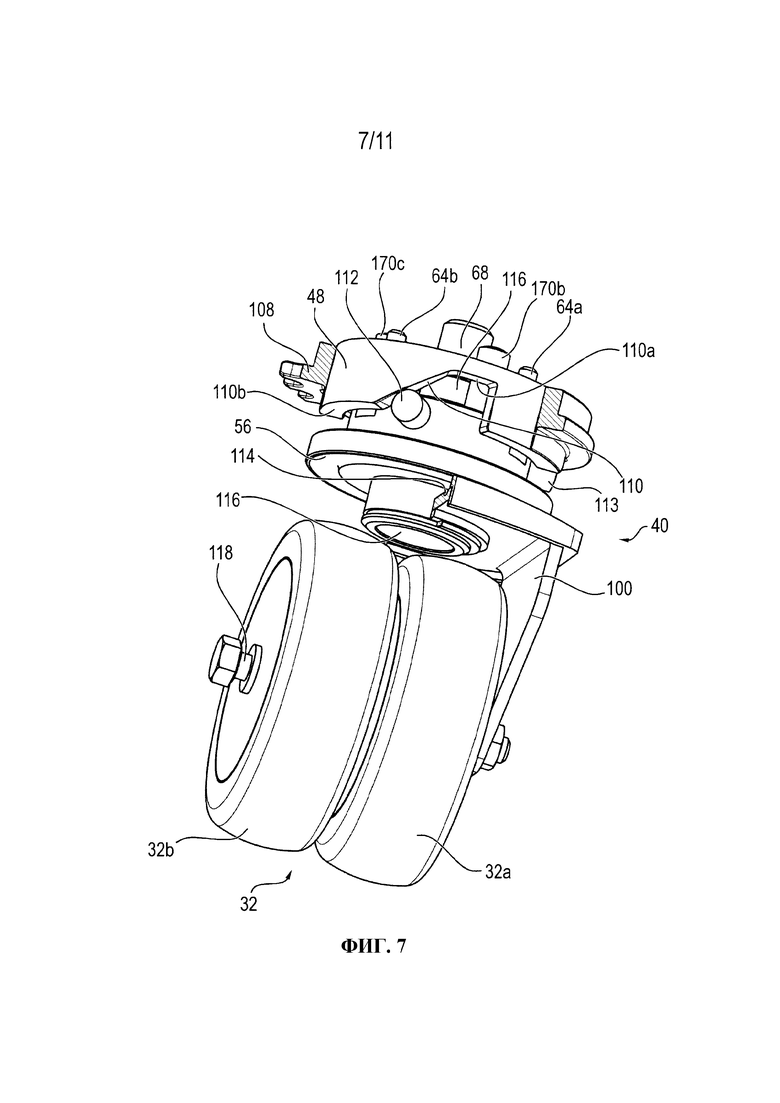
фиг. 7 - вид сбоку в перспективе согласно фиг. 6, на котором изображен первый установочный блок в промежуточном положении между убранным положением и выдвинутым положением первого соединения транспортных роликов;
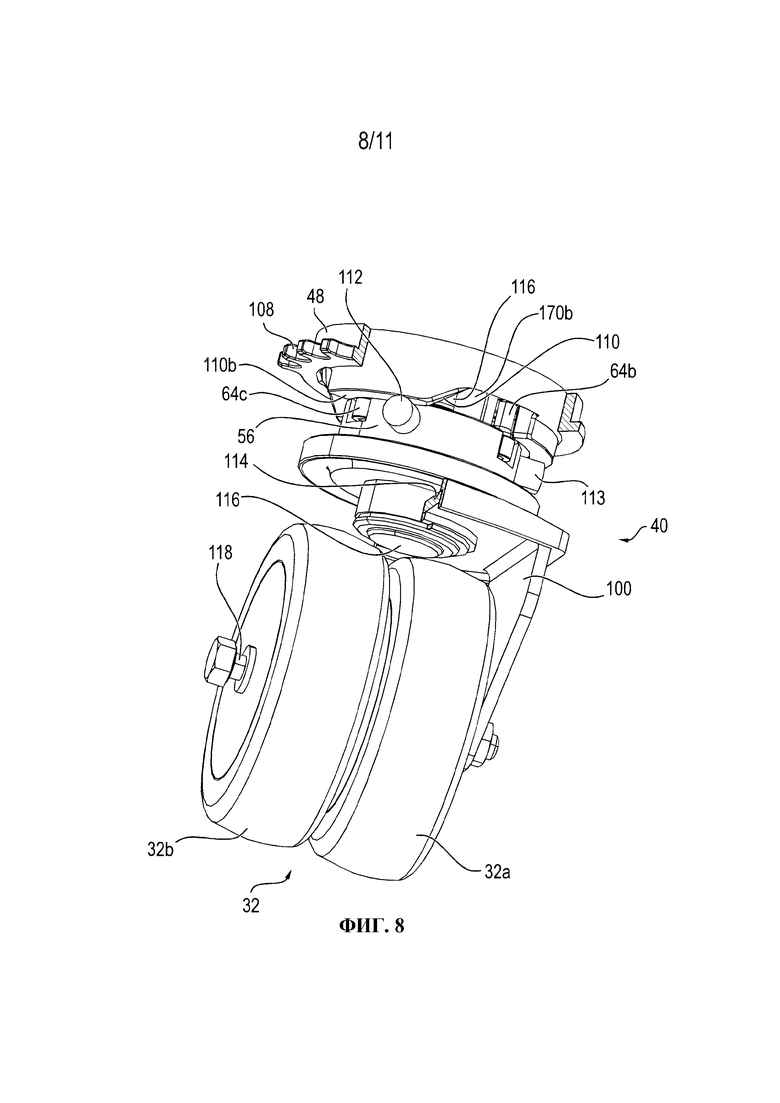
фиг. 8 - вид сбоку в перспективе согласно фиг. 6 и 7, на котором изображен первый установочный блок в выдвинутом положении первого соединения транспортных роликов;
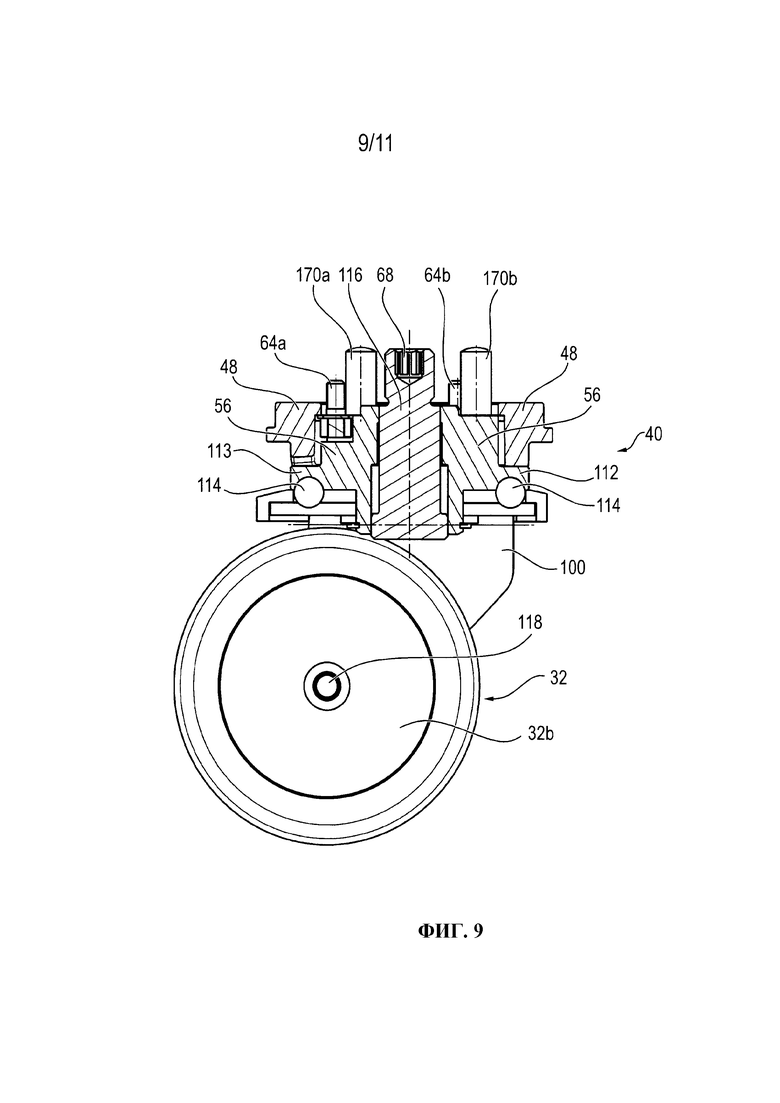
фиг. 9 - подробное изображение в разрезе первого установочного блока в убранном положении соединения транспортных роликов;
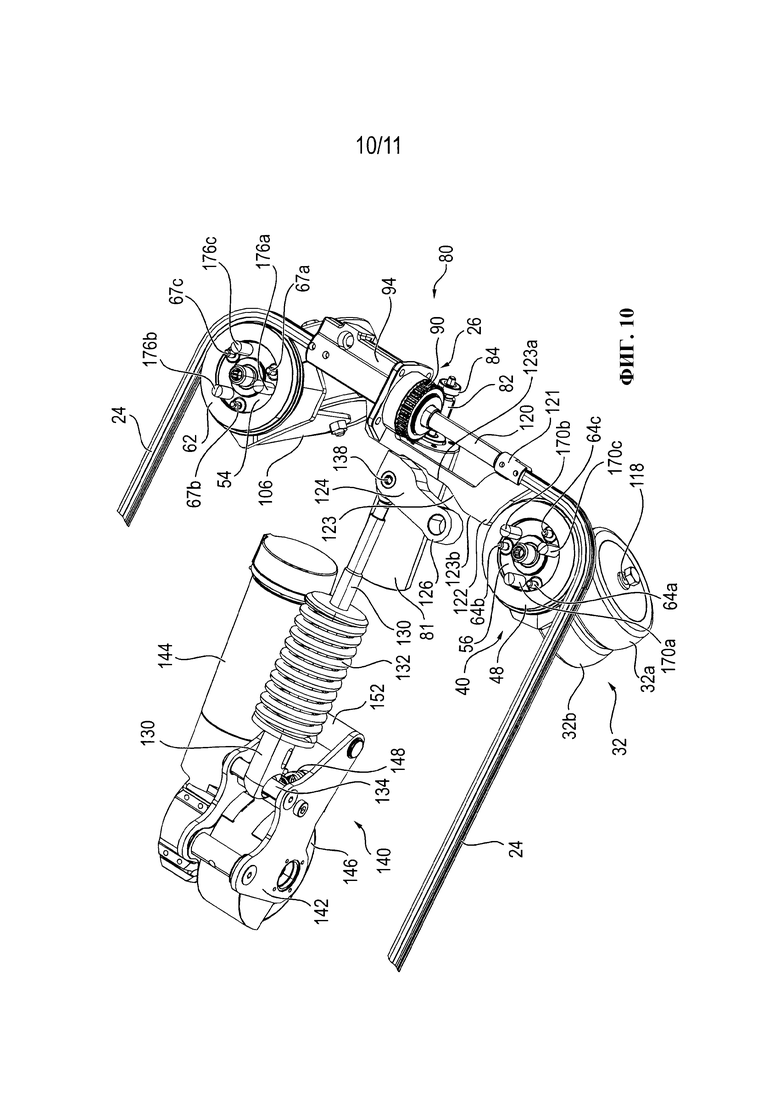
фиг. 10 - подробное изображение фрагмента расположения приводных элементов, которые имеются в ножке операционного стола согласно второму варианту осуществления; и
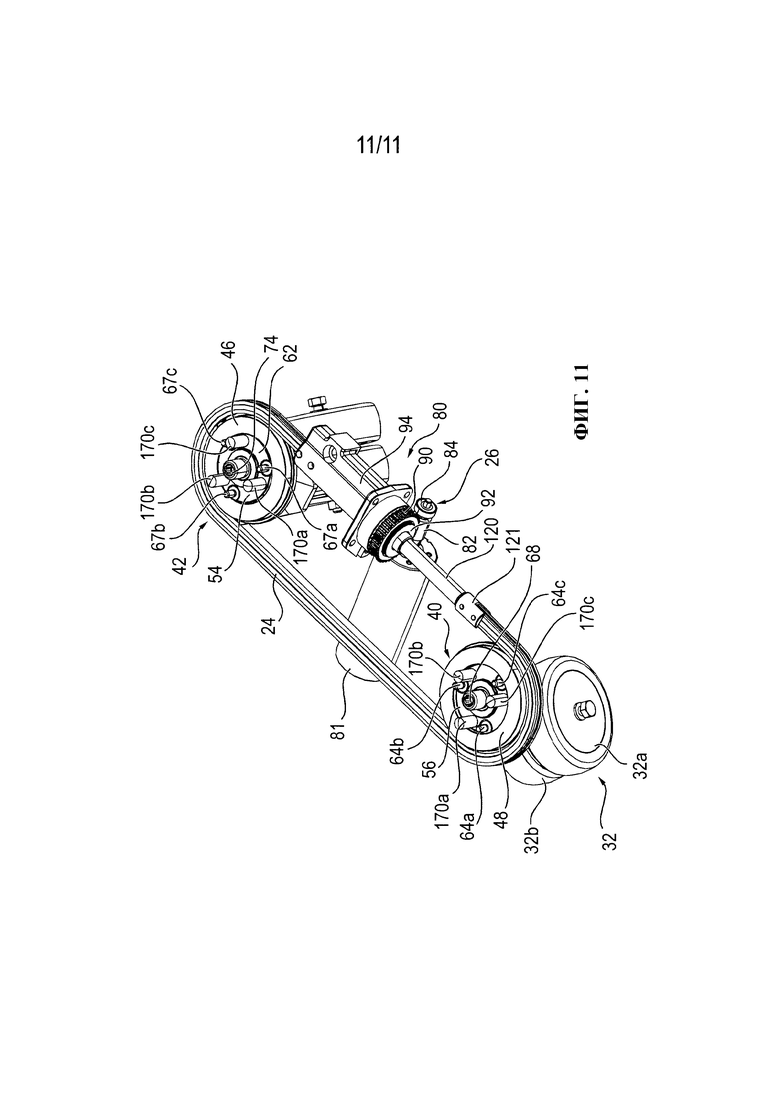
фиг. 11 - подробное изображение фрагмента расположения приводных элементов ножки операционного стола согласно третьему варианту осуществления.
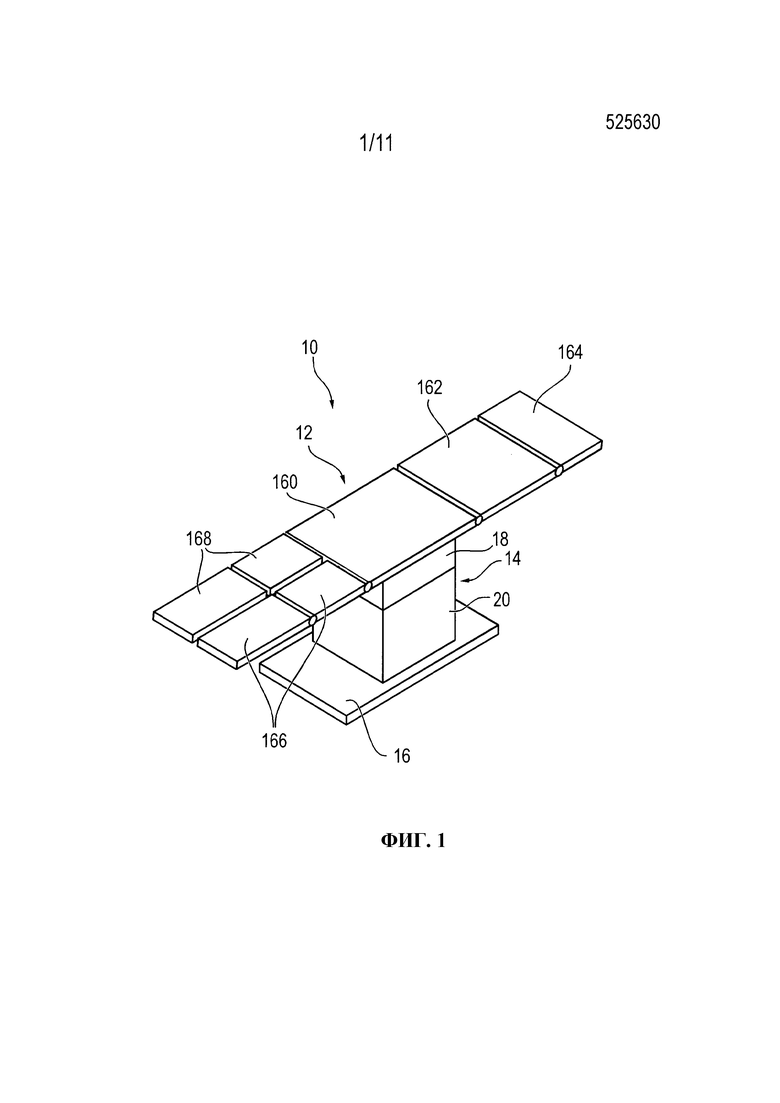
Фиг. 1 показывает схематичное изображение операционного стола 10 согласно первому варианту осуществления изобретения с поверхностью 12 укладки пациента, колонной 14 операционного стола и ножкой 16 операционного стола. При этом колонна 14 операционного стола включает в себя головку 18 колонны и основание 20.
Поверхность 12 укладки пациента имеет несколько регулируемых друг относительно друга по своему положению компонентов, которые делают возможным различное расположение не изображенного пациента. В данном примере осуществления поверхность 12 укладки пациента имеет пластину 160 сиденья, пластину 162 для спины, пластину 164 для головы, состоящую из двух частей левую пластину 166 для ноги и состоящую из двух частей правую пластину 168 для ноги.
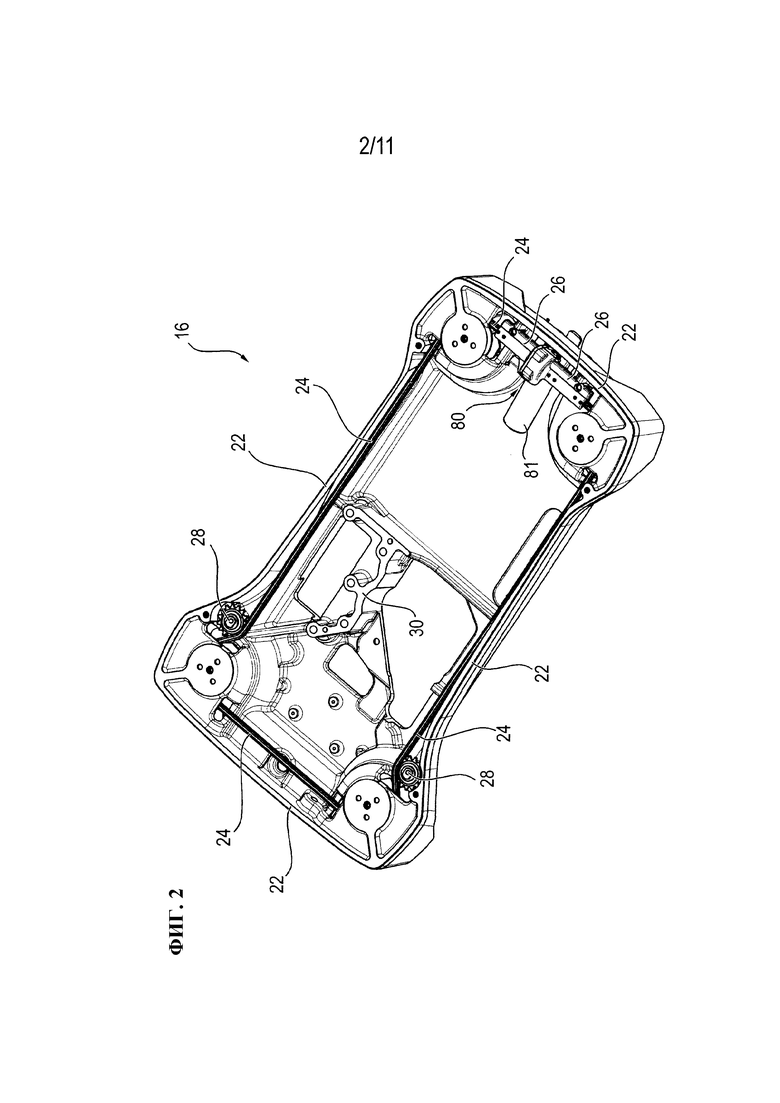
На фиг. 2 изображен подробный вид сверху в перспективе на шасси 22 ножки 16 операционного стола с приводным блоком 80 и расположенной на шасси 22 цепью 24 для приведения в действие четырех установочных блоков. Элементы с одинаковой конструкцией и одинаковой функцией имеют одинаковые ссылочные позиции. Показанная на фиг. 1 защитная пластина ножки 16 операционного стола не изображена на фиг. 2, так что на фиг. 2 можно увидеть шасси 22 и приводные элементы для вдвигания и выдвигания транспортных роликов из ножки 16 операционного стола, а также соединительный фланец 30 для соединения ножки 16 операционного стола с колонной 14 операционного стола.
Приводной блок 80 включает в себя электродвигатель 81 и передаточный механизм 26. Передаточный механизм 26 преобразует вращательное движение электродвигателя 81 в поступательное движение, причем не видимый на фиг. 2 резьбовой стержень во время вращательного движения электродвигателя 81 перемещается вдоль своей продольной оси. Оба конца резьбового стержня соединены с концами служащей в качестве механического соединительного средства цепи 24, которая вместе с резьбовым стержнем образует замкнутую по периметру силовую передачу для приведения в действие четырех закрытых шасси 22 на фиг. 2 установочных блоков для вдвигания и выдвигания транспортных роликов. Цепь 24 находится в зацеплении в каждом случае с одним элементом зацепления установочных блоков. Кроме того, предусмотрены два натяжных зубчатых колеса 28 для направления и для натяжения цепи 24. Приведение в движение цепи 24 разъясняется еще более подробно дополнительно в сочетании с фиг. 4.
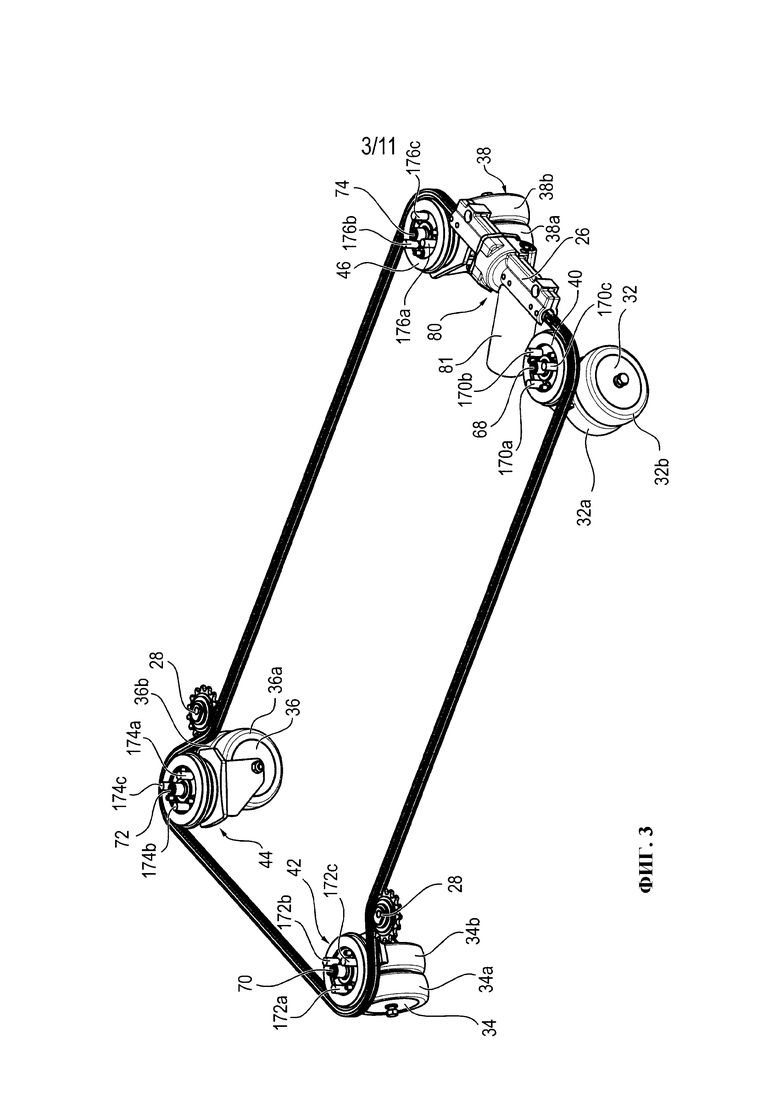
На фиг. 3 показано расположение согласно фиг. 2 без шасси 22, причем изображены: приводной блок 80 и четыре находящихся в зацеплении с цепью 24 установочных блока с 40 по 46 для установки (перемещения) в каждом случае одного соединения с 32 по 38 транспортных роликов, состоящего в каждом случае из двух транспортных роликов с 32а, 32b по 38а, 38b.
Цепь 24 находится в зацеплении в каждом случае с одним элементом зацепления первого установочного блока 40, второго установочного блока 42, третьего установочного блока 44 и четвертого установочного блока 46. Во время поступательного движения цепи 24 элементы зацепления четырех установочных блоков с 40 по 46 вращаются в одном направлении вращения.
Каждый установочный блок с 40 по 46 в каждом случае имеет три направляющих пальца, которые обозначены ссылочными позициями с 170а по 170с, с 172а по 172с, с 174а по 174с и с 176а по 176с, и которые в каждом случае одной своей частью установлены в ответных отверстиях шасси 22 ножки 16 операционного стола. Кроме того, каждый установочный блок с 40 по 46 при помощи резьбового участка с 68 по 74 в каждом случае одной опорной цапфы неподвижно соединен с шасси 22 ножки 16 операционного стола.
Конструкция и функция выполненных идентично установочных блоков с 40 по 46 описываются далее подробно в сочетании с фиг. 6-9 на примере установочного блока 40.
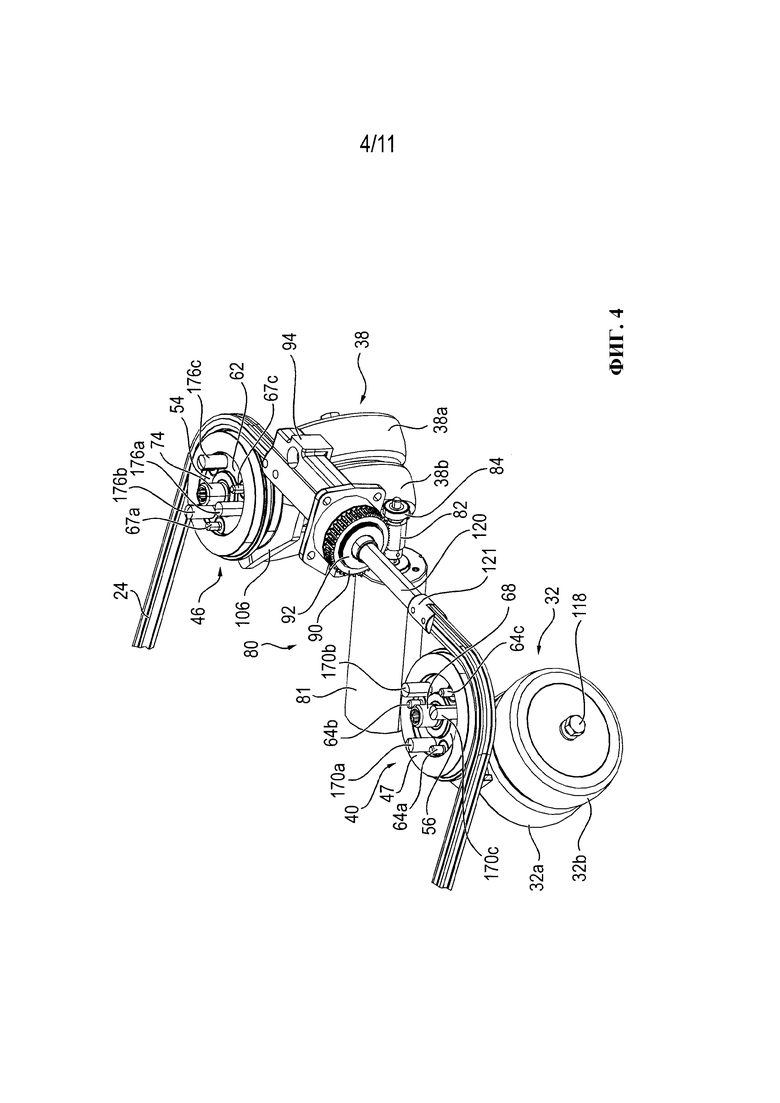
Фиг. 4 показывает фрагмент расположения согласно фиг. 3. Этот фрагмент включает в себя первый установочный блок 40, четвертый установочный блок 46, передаточный механизм 26, а также приводной блок 80. В отличие от фиг. 3 убрана половина корпуса передаточного механизма 26, служащего среди прочего для осевого размещения передаточного механизма 26.
Первый приводной блок 80 включает в себя первый электродвигатель 81, расположенное на выходном валу электродвигателя 81 червячное колесо 82 и установленный на шасси 22 подшипник 84. Червячное колесо 82 находится в зацеплении со служащим в качестве винтовой гайки зубчатым колесом 90 с внутренней резьбой. При этом червячное колесо 82 и зубчатое колесо 90 образуют червячную передачу. Зубчатое колесо 90 ограничивается по бокам в каждом случае одним осевым (упорным) подшипником, так что оно зафиксировано или неподвижно в направлении продольной оси резьбового стержня 120. Первый осевой подшипник 92 установлен в первом элементе 94 корпуса передаточного механизма 26, а второй осевой подшипник во втором, не показанном на фиг. 4 элементе 94 корпуса передаточного механизма 26, причем зубчатое колесо 90 может вращаться вокруг продольной оси резьбового стержня 120.
Внутренняя резьба зубчатого колеса 90 находится в зацеплении с внешней резьбой резьбового стержня 120. На видимом конце резьбового стержня 120 при помощи соединительного элемента 121 закреплен конец цепи 24. Цепь 24 посредством дополнительного, не изображенного соединения второго конца цепи 24 со вторым концом резьбового стержня 120 образует замкнутую силовую передачу. Цепь 24 находится в зацеплении с первым установочным блоком 40 при помощи элемента зацепления на наружной стороне первого установочного блока 40.
Первый установочный блок 40 имеет первый установочный элемент 48, первую направляющую 56 цапфы и первый резьбовой участок 68, который выполнен на верхнем конце не изображенной первой опорной цапфы. Первый резьбовой участок 68 служит для установления винтового соединения с шасси 22. На внешнем периметре первого установочного элемента 48 выполнен элемент зацепления в виде сегмента зубчатого колеса, который находится в зацеплении с цепью 24. Первая направляющая 56 цапфы имеет три выступающих вверх направляющих пальца с 170а по 170с и три винта с 64а по 64с. Направляющие пальцы с 170а по 170с как в убранном положении транспортных роликов, так и в выдвинутом положении транспортных роликов выступают в предусмотренные для них на шасси 22 отверстия, причем направляющие пальцы с 170а по 170с во время вдвигания и выдвигания транспортных роликов перемещаются вдоль своей продольной оси относительно шасси 22. При этом движение направляющих пальцев с 170а по 170с направляется в отверстиях, вследствие чего предотвращается вращение первой направляющей 56 цапфы. При помощи винтов с 64а по 64с первый установочный элемент 48 удерживается на шасси 22 с возможностью вращения.
Внизу на первом установочном блоке 40 расположено первое соединение 32 транспортных роликов с первым транспортным роликом 32а и вторым транспортным роликом 32b. Первое соединение 32 транспортных роликов имеет ось 118, которая делает возможным движение качения первого транспортного ролика 32а и второго транспортного ролика 32b вокруг этой оси.
Четвертый установочный блок 46 имеет четвертый установочный элемент 54, четвертую направляющую 62 цапфы и четвертый резьбовой участок 74, который выполнен сверху на четвертой опорной цапфе. Резьбовой участок 74 служит для установления винтового соединения с шасси 22. На внешнем периметре четвертого установочного элемента 54 выполнен элемент зацепления в виде сегмента зубчатого колеса, который находится в зацеплении с цепью 24. Четвертая направляющая 62 цапфы имеет три выступающих вверх направляющих пальца с 176а по 176с и три винта с 67а по 67с. Направляющие пальцы с 176а по 176с как в убранном положении транспортных роликов, так и в выдвинутом положении транспортных роликов выступают в предусмотренные для них на шасси 22 отверстия, причем направляющие пальцы с 176а по 176с во время вдвигания и выдвигания транспортных роликов перемещаются вдоль своей продольной оси относительно шасси 22. При этом движение направляющих пальцев с 176а по 176с направляется в отверстиях, вследствие чего предотвращается вращение четвертой направляющей 62 цапфы. При помощи винтов с 67а по 67с четвертый установочный элемент 54 удерживается на шасси 22 с возможностью вращения.
Внизу на четвертом установочном блоке 46 расположено четвертое соединение 38 транспортных роликов с седьмым транспортным роликом 38а и восьмым транспортным роликом 38b. Четвертое соединение 38 транспортных роликов имеет четвертую ось, которая делает возможным движение качения седьмого транспортного ролика 38а и восьмого транспортного ролика 38b вокруг этой оси.
На фиг. 5 показан подробный вид снизу в перспективе на первый установочный блок 40 вместе с первым соединением 32 транспортных роликов. Первый установочный элемент 48 имеет на внешнем периметре сегмент 108 зубчатого колеса, чья средняя ось совпадает с продольной осью первой опорной цапфы 116, так что сегмент 108 зубчатого колеса может вращаться вокруг этой продольной оси. Кроме того, первый установочный элемент 48 имеет наклонную поверхность 110, к которой прилегают первая поверхность 110а уровня и вторая поверхность 110b уровня. Первая поверхность 110а уровня и вторая поверхность 110b уровня не имеют наклона по отношению к горизонтали.
Первый установочный элемент 48 расположен в горизонтальной плоскости соосно вокруг первой направляющей цапфы. Выполненный в данном случае в виде цилиндрического штыря первый элемент 112 зацепления первой направляющей 56 цапфы направлен горизонтально и контактирует с первой поверхностью 110а уровня первого установочного элемента 48. В частности первая поверхность 110а уровня опирается на первый элемент 112 зацепления. Если первый установочный элемент 48, смотря с этой точки зрения, поворачивается по направлению часовой стрелки, то с первым элементом 112 зацепления последовательно вступят в контакт сначала наклонная поверхность 110 и затем вторая поверхность 110b уровня.
На этом показанном на фиг. 5 виде можно также увидеть нижнюю сторону винта 64а. Верхняя область направляющего пальца 170а, также как и дополнительные, не изображенные направляющие пальцы 170b, 170с, как уже упоминалось, установлена в не изображенном шасси 22. Вследствие этого первая направляющая 56 цапфы не может осуществлять вращательное движение вокруг своей вертикальной продольной оси. При этом продольная ось, обозначенная как первая продольная ось, является в то же время продольной осью первой направляющей 56 цапфы и первой опорной цапфы 116.
На нижней стороне первой направляющей 56 цапфы первый держатель 100 транспортного ролика при помощи первой поворотной опоры 114 установлен с возможностью вращения вокруг оси вращения. При этом эта ось вращения совпадает с первой продольной осью. На держателе 100 транспортного ролика закреплено первое соединение 32 транспортных роликов. Оба транспортных ролика 32а, 32b соединения 32 транспортных роликов имеют общую ось 118. Соединение 32 транспортных роликов может свободно вращаться вокруг оси вращения держателя 100 транспортного ролика.
Первый установочный элемент 48 установлен с возможностью вращения вокруг первой продольной оси опорной цапфы 116. Если первый установочный элемент 48, смотря с показанной на фиг. 5 точки зрения, осуществляет вращательное движение по направлению часовой стрелки, то первая поверхность 110а уровня, а затем первая наклонная поверхность 110 скользят по первому элементу 112 зацепления до тех пор, пока вторая поверхность 110b уровня не будет расположена над первым элементом 112 зацепления. Это соответствует изменению положения первого соединения 32 транспортных роликов с убранного положения на выдвинутое положение. При этом установочный элемент 48 переместился вверх, то есть в отвернутом от первого соединения 32 транспортных роликов направлении. Вследствие этого поднимается шасси 22 ножки 16 операционного стола вместе с другими элементами операционного стола 10, если транспортные ролики 32а, 32b соединения 32 транспортных роликов выдвигаются благодаря описанному процессу и перемещаются вниз из шасси.
Фиг. 6 показывает подробный вид сбоку в перспективе на первый установочный блок 40 в убранном положении первого соединения 32 транспортных роликов. В дополнение к показанным на фиг. 5 элементам можно увидеть верхнюю область направляющих пальцев 170а, 170b и верхнюю область винтов 64а, 64b.
Фиг. 7 показывает вид сбоку в перспективе согласно фиг. 6, на котором изображен первый установочный блок 40 в промежуточном положении между убранным положением и выдвинутым положением первого соединения 32 транспортных роликов. При этом первый установочный элемент 48 был настолько повернут по направлению часовой стрелки и сдвинут вверх, что первая наклонная поверхность 110 опирается на первый элемент 112 зацепления.
В дополнение к первому элементу 112 зацепления первого установочного блока 40 на фиг. 7 можно увидеть дополнительный элемент 113 зацепления. Этот элемент 113 зацепления во время вращательного движения первого установочного элемента 48 осуществляет движение, параллельное первому элементу 112 зацепления. При этом на дополнительный элемент зацепления 113 опирается вторая наклонная поверхность первого установочного элемента 48, которая на этом виде закрыта. В общей сложности установочный элемент 48 имеет три расположенные на одинаковом угловом смещении друг относительно друга наклонные поверхности 110, а установочный блок 40 имеет три расположенных на одинаковом угловом смещении элемента 112, 113 зацепления.
На фиг. 8 показан вид сбоку в перспективе на первый установочный блок 40 с первым соединением 32 транспортных роликов согласно фиг. 6 и 7, на котором первый установочный блок 40 изображен в выдвинутом положении первого соединения 32 транспортных роликов. Это положение было достигнуто посредством продолжения вращения первого установочного элемента 48 по направлению часовой стрелки из показанного на фиг. 7 положения. При этом первый элемент 112 зацепления и дополнительный элемент 113 зацепления были настолько повернуты установочным элементом 48 и подняты благодаря скольжению по наклонной поверхности 110, что первый элемент 112 зацепления оказывается расположенным под второй поверхностью 110b уровня. Это соответствует выдвинутому положению соединения 32 транспортных роликов. В частности первый установочный элемент 48 может снова опускаться посредством дополнительного противоположного вращательного движения. Тем самым приподнятый первым установочным элементом 48 операционный стол 10 удерживается в устойчивом положении. Также дополнительное вращение установочного элемента 48 по направлению часовой стрелки не приводит к дополнительному перемещению по высоте установочного элемента 48 и тем самым операционного стола 10, так как элемент 112 зацепления скользит по поверхности 110b уровня, а дополнительные элементы зацепления по дополнительным не изображенным поверхностям уровня установочного элемента 48.
Фиг. 9 показывает подробное изображение в разрезе первого установочного блока 40 в убранном положении соединения 32 транспортных роликов. При этом первая опорная цапфа 116 может соединяться с шасси 22 ножки 16 операционного стола при помощи первого резьбового участка 68. Первая направляющая 56 цапфы опирается на первую поворотную опору 114 первого держателя 100 транспортного ролика. В частности можно увидеть то, что первая опорная цапфа 116 расположена с возможностью вертикального перемещения по отношению к первой направляющей 56 цапфы.
Первый установочный элемент 48 установлен с возможностью вращения вокруг первой продольной оси первой опорной цапфы 116 и опирается на первый элемент 112 зацепления, дополнительный элемент 113 зацепления и не изображенный третий элемент зацепления.
На фиг. 10 аналогично показанному на фиг. 4 первому варианту осуществления показано подробное изображение фрагмента расположения приводных элементов, которые имеются в ножке операционного стола согласно второму варианту осуществления. В отличие от фиг. 4 этот второй вариант осуществления дополнительно включает в себя приводной ролик 146, второй приводной блок 144 и опускной блок 140. Кроме того, с резьбовым стержнем 120 прочно соединен управляющий профиль 122. С этим управляющим профилем 122 находится в зацеплении исполнительный элемент 124. Исполнительный элемент 124 своим первым концом установлен на первой вращающейся опоре 126 с возможностью вращения вокруг вертикальной оси вращения. На противоположном первому концу втором конце исполнительного элемента 124 исполнительный элемент 124 прилегает к управляющему профилю 122. При этом второй конец исполнительного элемента 124 прижимается к управляющему профилю 122. С исполнительным элементом 124 отклоняющий стержень 130 соединен таким образом, что при вращении вокруг первой вращающейся опоры 126 отклоняющий стержень 130 совершает поступательное отклоняющее движение. На отклоняющем стержне 130 предварительно натянутая прижимная пружина 132 закреплена таким образом, что через третью вращающуюся опору 152 держатель 142 приводного ролика вместе с закрепленным на нем приводным роликом 146 прижимается к расположенной под приводным роликом 146 поверхности, то есть к полу под ножкой операционного стола. С держателем 142 приводного ролика соединен второй приводной блок 144, который приводит в движение приводной ролик 146 при помощи двигателя. В этом примере осуществления второй приводной блок 144 выполнен в виде электродвигателя.
На управляющем профиле выполнена наклонная ступень 123 между первой поверхностью 123а ступени и второй поверхностью 123b ступени. При поступательном перемещении управляющего профиля 122 в первом направлении исполнительный элемент 124 скользит от первой поверхности 123а ступени через ступень 123 ко второй поверхности 123b ступени. При этом происходит перемещение отклоняющего стержня 130 и тем самым отклонение опускного блока 140 вместе с приводным роликом 146. При этом приводной ролик 146 прижимается к полу под ножкой операционного стола.
Если управляющий профиль 122 перемещается в противоположном первому направлению втором направлении, то отклоняющий стержень 130 перемещается в противоположном направлении при помощи возвратной пружины 148, так что опускной блок 140 вместе с приводным роликом 146 больше не прижимается к полу. При этом опускной блок 140 вместе с приводным роликом 146 при помощи третьей вращающейся опоры 152 поворачивается в сторону от пола. При этом усилие возвратной пружины 148 меньше, чем оказываемое вышеупомянутой прижимной пружиной 132 прижимное усилие. Дополнительное действие и дополнительное строение ножки операционного стола согласно второму примеру осуществления совпадают с ножкой 16 операционного стола первого примера осуществления.
На фиг. 11 показано подробное изображение фрагмента расположения приводных элементов ножки операционного стола согласно третьему варианту осуществления. В отличие от показанного на фиг. 4 расположения первого варианта осуществления в третьем варианте осуществления предусмотрены лишь первый установочный блок 40 и второй установочный блок 42. Два дополнительных, нерегулируемых транспортных ролика ножки операционного стола третьего варианта осуществления не изображены. Эти дополнительные транспортные ролики постоянно выступают вниз из ножки операционного стола.
В этом третьем примере осуществления цепь 24 обводится непосредственно вокруг первого установочного блока 40 и второго установочного блока 42, без того чтобы дополнительные установочные блоки находились в зацеплении с цепью 24. Дополнительное действие и дополнительное строение ножки операционного стола согласно третьему примеру осуществления совпадают с ножкой 16 операционного стола первого примера осуществления.
Список ссылочных позиций
10 - операционный стол
12 - поверхность укладки пациента
14 - колонна операционного стола
16 - ножка операционного стола
18 - головка колонны
20 - основание
22 - шасси
24 - цепь
26 - передаточный механизм
28 - натяжное зубчатое колесо
30 - соединительный фланец
32 - первое соединение транспортных роликов
32а - первый транспортный ролик
32b - второй транспортный ролик
34 - второе соединение транспортных роликов
34а - третий транспортный ролик
34b - четвертый транспортный ролик
36 - третье соединение транспортных роликов
36а - пятый транспортный ролик
36b - шестой транспортный ролик
38 - четвертое соединение транспортных роликов
38а - седьмой транспортный ролик
38b - восьмой транспортный ролик
40 - первый установочный блок
42 - второй установочный блок
44 - третий установочный блок
46 - четвертый установочный блок
48 - первый установочный элемент
50 - второй установочный элемент
52 - третий установочный элемент
54 - четвертый установочный элемент
56 - первая направляющая цапфы
58 - вторая направляющая цапфы
60 - третья направляющая цапфы
62 - четвертая направляющая цапфы
64а - первый винт
64b - второй винт
64c - третий винт
65а - первый винт
65b - второй винт
65c - третий винт
66а - первый винт
66b - второй винт
66c - третий винт
67а - первый винт
67b - второй винт
67c - третий винт
68 - первый резьбовой участок
70 - второй резьбовой участок
72 - третий резьбовой участок
74 - четвертый резьбовой участок
80 - первый приводной блок
81 - электродвигатель
82 - червячное колесо
84 - подшипник
90 - зубчатое колесо с внутренней резьбой
92 - первый осевой подшипник
94 - первый элемент корпуса
96 - цепь
100 - первый держатель транспортных роликов
102 - второй держатель транспортных роликов
104 - третий держатель транспортных роликов
106 - четвертый держатель транспортных роликов
108 - первый сегмент зубчатого колеса
110 - первая наклонная поверхность
110а - первая поверхность уровня
110b - вторая поверхность уровня
112 - первый элемент зацепления
113 - дополнительный элемент зацепления
114 - первая поворотная опора
116 - первая опорная цапфа
118 - первая ось
120 - резьбовой стержень
121 - соединительный элемент
122 - управляющий профиль
123 - ступень
123а - первая поверхность ступени
123b - вторая поверхность ступени
124 - исполнительный элемент
126 - первая вращающаяся опора
128 - вторая вращающаяся опора
130 - отклоняющий стержень
132 - прижимная пружина
140 - опускной блок
142 - держатель приводного ролика
144 - второй приводной блок
146 - приводной ролик
148 - возвратная пружина
152 - третья вращающаяся опора
160 - пластина сиденья
162 - пластина для спины
164 - пластина для головы
166 - состоящая из двух частей левая пластина для ноги
168 - состоящая из двух частей правая пластина для ноги
170а - первый направляющий палец
170b - второй направляющий палец
170c - третий направляющий палец
172а - первый направляющий палец
172b - второй направляющий палец
172c - третий направляющий палец
174а - первый направляющий палец
174b - второй направляющий палец
174c - третий направляющий палец
176а - первый направляющий палец
176b - второй направляющий палец
176c - третий направляющий палец
Изобретение относится к ножке операционного стола и направлено на упрощение ее использования. Ножка операционного стола содержит по меньшей мере два выдвижных транспортных ролика. Операционный стол в убранном положении транспортных роликов стоит на опорном элементе операционного стола. Операционный стол в выдвинутом положении транспортных роликов может передвигаться на транспортных роликах. Предусмотрен первый механический установочный блок, при помощи которого может изменяться положение первого транспортного ролика, по меньшей мере, с убранного положения на выдвинутое положение. Предусмотрен второй механический установочный блок, при помощи которого может изменяться положение второго транспортного ролика, по меньшей мере, с убранного положения на выдвинутое положение. Первый установочный блок и второй установочный блок могут приводиться в движение первым приводным блоком, который механическим соединительным средством соединен с первым и со вторым установочным блоком. Механическое соединительное средство является цепью или ремнем, причем первый и второй установочные блоки соединены с первым приводным блоком при помощи цепи или ремня. 15 з.п. ф-лы, 11 ил.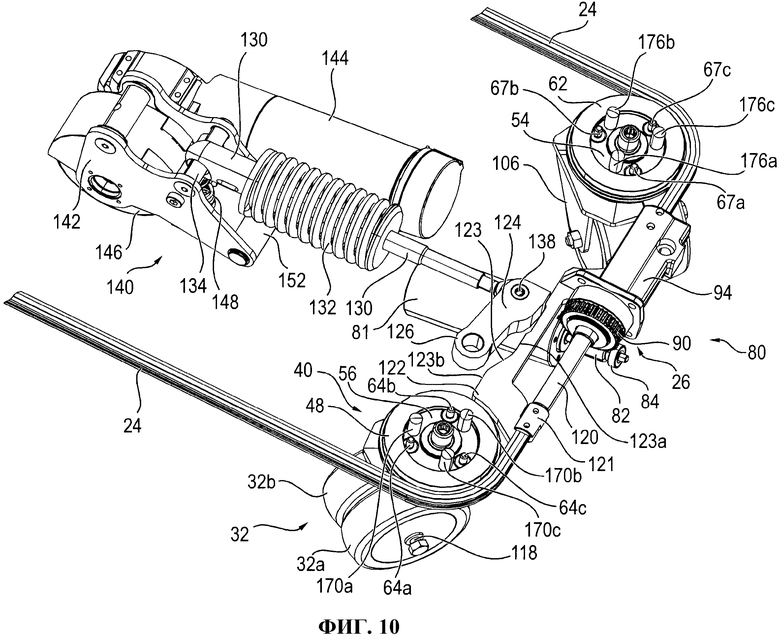
1. Ножка (16) операционного стола для операционного стола (10), содержащая по меньшей мере два выдвижных транспортных ролика (32а, 34а),
причем операционный стол (10) в убранном положении транспортных роликов (32а, 34а) стоит по меньшей мере на одном опорном элементе операционного стола (10),
причем операционный стол (10) в выдвинутом положении транспортных роликов (32а, 34а) может передвигаться на транспортных роликах (32а, 34а),
отличающаяся тем, что
- предусмотрен первый механический установочный блок (40), при помощи которого может изменяться положение первого транспортного ролика (32а), по меньшей мере, с убранного положения на выдвинутое положение,
- предусмотрен второй механический установочный блок (42), при помощи которого может изменяться положение второго транспортного ролика (34а), по меньшей мере, с убранного положения на выдвинутое положение,
- первый установочный блок (40) и второй установочный блок (42) могут приводиться в движение первым приводным блоком (80), который механическим соединительным средством (24) соединен с первым и со вторым установочным блоком (40, 42), и
- механическое соединительное средство является цепью (24) или ремнем, причем первый и второй установочные блоки (40, 42) соединены с первым приводным блоком (80) при помощи цепи (24) или ремня.
2. Ножка (16) операционного стола по п. 1, отличающаяся тем, что в выдвинутом положении транспортных роликов (32а, 34а) весом операционного стола (10) не оказывается усилие на механическое соединительное средство (24).
3. Ножка (16) операционного стола по п. 1 или 2, отличающаяся тем, что цепь (24) или ремень, в частности с элементами первого приводного блока (80), образует замкнутую силовую передачу.
4. Ножка (16) операционного стола по п. 3, отличающаяся тем, что
первый приводной блок (80) включает электродвигатель (81), который через ступень (82) передачи приводит в движение винтовую гайку (90) винтовой передачи,
причем внутренняя резьба винтовой гайки (90) находится в зацеплении с внешней резьбой резьбового стержня (120) винтовой передачи,
причем винтовая гайка (90) неподвижна в направлении продольной оси резьбового стержня (120) и установлена с возможностью вращения вокруг продольной оси резьбового стержня (120),
причем первый конец резьбового стержня (120) соединен с первым концом на первом конце цепи (24) или ремня, и
причем второй конец резьбового стержня (120) соединен со вторым концом цепи (24) или ремня, или
первый приводной блок (80) включает цилиндр синхронного хода с первым поршневым штоком и вторым поршневым штоком,
причем свободный конец первого поршневого штока соединен с первым концом цепи (24) или ремня, и
причем свободный конец второго поршневого штока соединен со вторым концом цепи (24) или ремня.
5. Ножка (16) операционного стола по п. 1, отличающаяся тем, что соединительное средство (24) находится в зацеплении с первым зубчатым колесом или сегментом (108) зубчатого колеса первого установочного блока (40) и со вторым зубчатым колесом или сегментом зубчатого колеса второго установочного блока (42),
причем при движении находящегося в зацеплении с зубчатыми колесами или сегментами (108) зубчатых колес соединительного средства (24) осуществляется поворот зубчатых колес или сегментов (108) зубчатых колес, и
причем благодаря повороту зубчатых колес или сегментов (108) зубчатых колес транспортные ролики (32а, 34а) могут переводиться из убранного в выдвинутое положение и из выдвинутого в убранное положение.
6. Ножка (16) операционного стола по п. 1, отличающаяся тем, что
первый установочный блок (40) имеет первую расположенную вертикально опорную цапфу (116) с первой вертикальной продольной осью,
первый установочный блок (40) имеет первую направляющую (56) цапфы для направления относительного движения между первой направляющей (56) цапфы и первой опорной цапфой (116) в вертикальном направлении,
первый установочный блок (40) имеет по меньшей мере один первый установочный элемент (48) с первой наклонной поверхностью (110), с которой первый элемент (112) зацепления первой направляющей (56) цапфы находится в таком зацеплении, что при относительном движении первого элемента (112) зацепления вдоль первой наклонной поверхности (110) осуществляется поступательное установочное движение первого установочного элемента (48),
второй установочный блок (42) имеет вторую расположенную вертикально опорную цапфу со второй вертикальной продольной осью,
второй установочный блок (42) имеет вторую направляющую (58) цапфы для направления относительного движения между второй направляющей (58) цапфы и второй опорной цапфой (116) в вертикальном направлении, и
второй установочный блок (42) имеет по меньшей мере один второй установочный элемент (50) со второй наклонной поверхностью, с которой второй элемент зацепления второй направляющей (58) цапфы находится в таком зацеплении, что при относительном движении второго элемента зацепления вдоль второй наклонной поверхности осуществляется поступательное установочное движение второго установочного элемента (50).
7. Ножка (16) операционного стола по п. 6, отличающаяся тем, что
наклонные поверхности (110) первого установочного элемента (48) и второго установочного элемента (50) имеют наклон больше 0°, и
к наклонным поверхностям (110) первого установочного элемента (48) и второго установочного элемента (50) прилегает поверхность (110b) уровня с наклоном 0°.
8. Ножка (16) операционного стола по п. 6 или 7, отличающаяся тем, что
верхний конец первой опорной цапфы (116) имеет соединительную область, при помощи которой первая опорная цапфа (116) прочно соединена с шасси (22) ножки (16) операционного стола,
верхний конец второй опорной цапфы имеет соединительную область, при помощи которой вторая опорная цапфа прочно соединена с шасси (22) ножки (16) операционного стола,
первый установочный элемент (48) первого установочного блока (40) установлен с возможностью вращения вокруг первой продольной оси,
второй установочный элемент (50) второго установочного блока (42) установлен с возможностью вращения вокруг второй продольной оси,
первый установочный элемент (48) и второй установочный элемент (50) соединены с приводным блоком (80) при помощи механического соединительного средства (24) таким образом, что они поворачиваются вокруг продольной оси соответствующей опорной цапфы (116) при приведении в движение приводным блоком (80),
первая наклонная поверхность (110) опирается на первый элемент (112) зацепления при изменении положения первого транспортного ролика (32а),
вторая наклонная поверхность опирается на второй элемент зацепления при изменении положения второго транспортного ролика (34а),
первый элемент (112) зацепления скользит по первой наклонной поверхности (110), или первый элемент (112) зацепления имеет ролик, который прокатывается по первой наклонной поверхности (110),
второй элемент зацепления скользит по второй наклонной поверхности, или второй элемент зацепления имеет ролик, который прокатывается по второй наклонной поверхности,
положение первого транспортного ролика (32а) может изменяться благодаря повороту первого установочного элемента (48), и
положение второго транспортного ролика (34а) может изменяться благодаря повороту второго установочного элемента (50).
9. Ножка (16) операционного стола по п. 8, отличающаяся тем, что
по меньшей мере один первый направляющий палец (170а) первой направляющей (56) цапфы установлен таким образом в первом отверстии ножки (16) операционного стола, соответствующем первому направляющему пальцу (170а), что первая направляющая (56) цапфы установлена без возможности поворота вокруг первой продольной оси, и
по меньшей мере один второй направляющий палец (172а) второй направляющей (58) цапфы установлен таким образом во втором отверстии ножки (16) операционного стола, соответствующем второму направляющему пальцу (172а), что вторая направляющая (58) цапфы установлена без возможности поворота вокруг второй продольной оси.
10. Ножка (16) операционного стола по п. 9, отличающаяся тем, что
первый установочный элемент (48) и первая направляющая (56) цапфы расположены соосно вокруг первой опорной цапфы (116), и
второй установочный элемент (50) и вторая направляющая (58) цапфы расположены соосно вокруг второй опорной цапфы.
11. Ножка (16) операционного стола по п. 6, отличающаяся тем, что
первый установочный блок (40) имеет первый держатель (100) транспортного ролика и первую опору (114), причем первая опора (114) расположена между первой направляющей (56) цапфы и первым держателем (100) транспортного ролика, так что первый держатель (100) транспортного ролика с первым транспортным роликом (32а) установлен с возможностью поворота вокруг вертикальной оси, и
второй установочный блок (42) имеет второй держатель (102) транспортного ролика и вторую опору, причем вторая опора расположена между второй направляющей (58) цапфы и вторым держателем (102) транспортного ролика, так что второй держатель (102) транспортного ролика со вторым транспортным роликом (34а) установлен с возможностью поворота вокруг вертикальной оси.
12. Ножка (16) операционного стола по п. 1, отличающаяся тем, что
посредством первого установочного блока (40) удерживается и направляется по меньшей мере первый транспортный ролик (32а), предпочтительно первое соединение (32) транспортных роликов, состоящее из первого транспортного ролика (32а) и дополнительного транспортного ролика (32b), и
посредством второго установочного блока (42) удерживается и направляется по меньшей мере второй транспортный ролик (34а), предпочтительно второе соединение (34) транспортных роликов, состоящее из второго транспортного ролика (34а) и дополнительного транспортного ролика (34b).
13. Ножка (16) операционного стола по п. 1, отличающаяся тем, что по меньшей мере один приводимый в движение при помощи дополнительного второго приводного блока (144) приводной ролик снабжен приводимым в действие механическим соединительным средством (24) опускным блоком (140), при помощи которого приводной ролик (146) может поворачиваться из исходного положения в откинутое положение и/или из откинутого в исходное положение.
14. Ножка (16) операционного стола по п. 13, отличающаяся тем, что первый приводной блок (80) на первом этапе изменяет положение транспортных роликов (32а, 34а) с убранного положения на выдвинутое положение, а на втором этапе изменяет положение приводного ролика (146) с убранного на выдвинутое положение.
15. Ножка (16) операционного стола по п. 4 и п. 13 или 14, отличающаяся тем, что
опускной блок (140) имеет ступенчатый управляющий профиль (122) по меньшей мере с одной ступенью (123), причем ступень (123) соединяет первую и вторую поверхности (123а, 123b) ступени, причем управляющий профиль (122) соединен механически неподвижно с резьбовым стержнем (120), и управляющий профиль (122) может с ним совместно передвигаться, исполнительный элемент (124) находится в зацеплении с управляющим профилем (122), при движении резьбового стержня (120) управляющий профиль (122) проводится мимо исполнительного элемента (124), так что исполнительный элемент (124) проскальзывает по первой ступени (123),
причем посредством исполнительного элемента (124) при движении по меньшей мере по одной ступени (123) управляющего профиля (122) осуществляется установочное движение приводного ролика (146) из откинутого в исходное положение или из исходного в откинутое положение.
16. Ножка (16) операционного стола по п. 15, отличающаяся тем, что опускной блок (140) имеет пружину, которая при помощи усилия прижатия прижимает приводной ролик (146) по направлению к полу.
| DE 102010020129 A1, 10.11.2011 | |||
| DE 102010051126 A1, 16.05.2012 | |||
| СПОСОБ УТИЛИЗАЦИИ ДЕМОНТИРОВАННЫХ МАГИСТРАЛЬНЫХ ТРУБ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532677C1 |
| GB 1559945 A, 30.01.1980 | |||
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПРЕДМЕТОВ МЕБЕЛИ, СОДЕРЖАЩЕЕ САМООРИЕНТИРУЮЩИЙСЯ И САМОСТОПОРЯЩИЙСЯ РОЛИК | 2012 |
|
RU2530191C2 |

