Настоящее изобретение относится к рычажному механизму для вилочного погрузчика, а также к колесному механизму стабилизации, подходящему для использования с вилочным погрузчиком.
Использование вилочных погрузчиков для снятия и помещения грузов на поверхности разной глубины и высоты известно. Подобные вилочные погрузчики, в целом, содержат раму на колесах, на которую установлена вертикальная мачта и средства для перемещения грузов. Обычно средства для перемещения грузов выполнены в виде L-образных элементов, таких, например, как вилы или зубцы вил, которые могут зацепляться с перемещаемым грузом. В настоящем описании изобретения, если это не оговорено иначе в явной форме, термины средства для перемещения грузов, вилы или зубцы вил используются взаимозаменяемо при описании средств, при помощи которых вилочный погрузчик перемещает груз. Известно, что подобные вилочные погрузчики могут быть выполнены с возможностью их крепления на перевозочном транспортном средстве. Подобные вилочные погрузчики обычно именуются «мобильные вилочные погрузчики» или вилочные погрузчики «piggy-back».
Стандартные вилочные погрузчики рассчитаны на работу с грузами, имеющими определенный максимальный вес при их нахождении в определенном переднем центре тяжести. Вилочный погрузчик и груз следует рассматривать как устройство с постоянно меняющимся центром тяжести в каждой точке перемещения груза. Поэтому все вилочные погрузчики должны проектироваться таким образом, чтобы они обеспечивали достаточный противовес для компенсации опрокидывающего момента, возникающего при подъеме груза с определенным весом во время штабелирования. Еще более важно, чтобы вилочный погрузчик обладал достаточным противовесом в режиме движения, когда из-за динамических усилий требуется значительно большая устойчивость.
У стандартных вилочных погрузчиков с противовесом сзади устанавливается дополнительный противовес, обеспечивающий безопасную эксплуатацию машины во время штабелирования или передвижения. Между тем мобильные вилочные погрузчики, в целом, имеют раздвоенную конструкцию рамы, что позволяет перемещать грузы в режиме движения, по существу, между передними колесами. Это существенно повышает устойчивость без необходимости использования дополнительного противовеса. Между тем конструкция раздвоенной рамы, в целом, требует использования системы вылета, позволяющей вилам зацепляться с грузом, особенно на полу прицепа или на поднятой платформе.
В целом, системы вылета содержат подвижные мачты, телескопические вилы или рычажные механизмы пантографов. Когда вилы находятся в выдвинутом положении, грузоподъемность вил существенно уменьшается. Это можно исправить за счет одновременного увеличения массы машины, увеличения массы противовеса и использования стабилизаторных или домкратных ножек, установленных спереди вилочного погрузчика. Между тем для того чтобы мобильные вилочные погрузчики можно было крепить на перевозочном транспортном средстве, они должны быть легкими. Поэтому предпочтительно использовать средства для увеличения грузоподъемности вилочного погрузчика без увеличения веса вилочного погрузчика.
Пантографная система вылета и телескопические вилы проходят наклонно от мачты или вилочной каретки. Это приводит к кратному увеличению момента наклона, поскольку выдвижение вил происходит от вертикальной мачты. На практике это приводит к увеличению опрокидывающего момента и снижению управляемости во время наклонных операций.
Кроме этого, проблемы, связанные с пантографной системой вылета и телескопическими вилами, увеличивают себестоимость. Телескопические вилы несмотря на то, что они являются наиболее компактными из трех вышеупомянутых систем, являются исключительно дорогостоящим элементом вилочных погрузчиков. Средства, обеспечивающие функционирование пантографной системы, требуют во время эксплуатации дублирование элементов, например деталей рычажного механизма, направляющих, подшипников и т.п. Это не только увеличивает себестоимость вилочного погрузчика, но также дополнительно увеличивает вес, которой должен быть уравновешен для того, чтобы выдвижной механизм вилочного погрузчика мог эффективно использоваться. Кроме этого, при креплении вилочного погрузчика на перевозочном транспортном средстве у пантографной системы имеется значительное количество выступающих звеньев. Это создает проблемы в связи со строгими требованиями дорожного законодательства для перевозочных транспортных средств, таких как грузовики или фуры.
Каждая из вышеупомянутых проблем еще более усугубляется, когда вилочному погрузчику приходится доставать палету, расположенную с другой стороны кузова фуры, для ее выгрузки, не перемещаясь на другую сторону кузова. Для этого используется т.н. система двойного вылета. Подобные системы обычно содержат одну или несколько вышеупомянутых систем, например комбинацию из телескопических вил, установленных на подвижной мачте, телескопических вил, установленных на пантографной системе, или пантографную систему, используемую совместно с подвижной мачтой.
Таким образом, цель настоящего изобретения заключается в том, чтобы предложить рычажный механизм и колесный механизм стабилизации, позволяющие решить вышеупомянутые проблемы.
Известно, что термин «содержать» в разных законодательствах может трактоваться как в охватывающем, так и в исключающем значении. В настоящем описании изобретения, если это не оговорено отдельно в явном виде, термин «содержать» используется в охватывающем значении, в том смысле, что он может включать в себя не только перечисленные элементы, на которые он непосредственно ссылается, но также и другие, не указанные элементы. Соответственно, термин «содержать» имеет максимально возможное широкое значение, предусмотренное любым законодательством, подобный подход также относится и к используемым терминам «состоящий из» и/или «содержащий».
Дополнительные аспекты настоящего изобретения станут более понятны из последующего описания, которое приведено исключительно в качестве примера.
По первому аспекту настоящего изобретения предлагается рычажный механизм для перемещения, содержащий:
подвижные средства, расположенные внутри направляющей,
первый раскос, шарнирно соединенный с подвижными средствами в первой точке поворота, а также с соединяющим рычажным элементом во второй точке поворота;
второй раскос, шарнирно соединенный в третьей точке поворота с первым раскосом вблизи его средней точки, а также шарнирно соединенный в четвертой точке поворота, неподвижной относительно направляющей рядом с центральной линией упомянутого направляющей,
третий раскос, шарнирно соединенный со вторым раскосом в пятой точке поворота, а также с соединяющим рычажным элементом в шестой точке поворота, с противоположного торца так, что траектория второй точки поворота, соединяющей первый раскос с соединительным рычажным элементом, перемещается, по существу, перпендикулярно направляющей, когда рычажный механизм перемещается между убранным и выдвинутым положениями, поддерживая в целом постоянный угол относительно направляющей, когда рычажный механизм перемещается между убранным и выдвинутым положениями,
привод, обеспечивающий перемещение рычажного механизма за счет приложения усилия к звеньям рычажного механизма, при этом
один конец привода шарнирно соединен с первым раскосом, а другой конец привода контактирует с неподвижным участком направляющей.
Преимущество рычажного механизма по изобретению заключается в том, что он позволяет регулировать угол перемещения соединительного элемента во второй плоскости, по мере того как механизм вылета выдвигается или убирается. Рычажный механизм также сконструирован таким образом, чтобы он позволял снизить производственную себестоимость по сравнению со стандартными системами.
Перемещение рычажного механизма осуществляется за счет приложения усилия к его звеньям. Как вариант, усилие может прикладываться приводом.
В идеальном случае один конец привода шарнирно соединен с первым раскосом, а другой конец привода соединен с неподвижным участком направляющей.
Как вариант или дополнительно, упомянутый другой конец привода может быть шарнирно установлен на определенном участке второго раскоса.
Усилие, прикладываемое приводом, заставляет перемещаемый груз перемещаться в первой плоскости, перемещая первый раскос внутри направляющей и, в конечном итоге, заставляя соединительный элемент перемещаться вдоль второй плоскости, проходящей, по существу, перпендикулярно первой плоскости. Подразумевается, что может использоваться любое количество приводов, необходимое специалисту в данной области техники.
Необязательно, по дополнительному аспекту изобретения третий раскос выполнен в виде гидроцилиндра или электроподъемника, обеспечивающего независимый наклон рычажного механизма, и позволяющий рычажному механизму выступать в качестве независимого наклонного механизма. Разумеется, следует понимать, что третий раскос не ограничен подобным типом независимого наклонного механизма, а для создания независимого наклона могут использоваться любые подходящие средства, известные специалисту в данной области техники. Во время эксплуатации соединительный рычажный элемент будет поворачиваться вокруг точки поворота, соединяющей первый раскос. Это позволяет увеличить вылет грузоподъемных средств без кратного увеличения наклонного момента при выдвижении механизма вылета от вертикальной вилочной мачты. Это позволяет рычажному механизму компенсировать угол наклона грузоподъемных средств к земле под действием груза, что в свою очередь снижает вероятность соскальзывания груза с грузоподъемных средств.
По дополнительному аспекту изобретения установочный элемент расположен на неподвижном участке относительно направляющей таким образом, чтобы точка поворота, соединяющая первый раскос с подвижными средствами, а также точка поворота, соединяющая второй раскос с установочными средствами, были расположены на центральной линии направляющей.
По дополнительному аспекту изобретения расстояния между точками поворота на первом раскосе, по существу, одинаковы, то есть расстояние между точкой поворота, соединяющей подвижные средства с первым раскосом, и точкой поворота, соединяющей второй раскос с первым раскосом, по существу, равно расстоянию между точкой поворота, соединяющей второй раскос с первым раскосом, и точкой поворота, соединяющей соединительный рычажный элемент с первым раскосом.
По дополнительному аспекту изобретения расстояние между точкой поворота, соединяющей второй раскос с первым раскосом, и точкой поворота, соединяющей второй раскос с установочным элементом, по существу, равно любому из следующих расстояний: расстоянию между точкой поворота, соединяющей подвижные средства с первым раскосом, и точкой поворота, соединяющей второй раскос с первым раскосом, либо расстоянию между точкой поворота, соединяющей второй раскос с первым раскосом, и точкой поворота соединяющей рычажный элемент с первым раскосом.
По дополнительному аспекту изобретения рычажный механизм по изобретению выполнен с возможностью использования с разгрузочно-погрузочным устройством. В идеальном случае по данному аспекту изобретения грузоподъемные средства закреплены на соединительном рычажном элементе. Опционно соединительный рычажный элемент содержит, по меньшей мере, одно звено, с которым шарнирно соединен первый раскос и второй раскос. Разумеется, следует понимать, что первый соединительный элемент может содержать любое количество звеньев, обеспечивающих достижение данной цели.
По дополнительному аспекту изобретения привод содержит тягу либо гидравлический или электрический подъемник. Разумеется, следует понимать, что для данной цели также могут использоваться любые другие типы соответствующих приводов, известные специалистам в данной области техники.
По дополнительному аспекту изобретения подвижные средства содержат элемент, который может перемещаться внутри направляющей между первым и вторым положениями. Например, подобный элемент включает в себя механизм скольжения или элемент качения. Разумеется, следует понимать, что для данной цели также могут использоваться любые другие типы соответствующих элементов, известные специалистам в данной области техники.
По дополнительному аспекту изобретения направляющая разъемно или скользяще прикреплена к вертикальному элементу, такому как вертикальная мачта вилочного погрузчика.
По дополнительному аспекту изобретения предлагается вилочный погрузчик, оснащенный рычажным механизмом. Вилочный погрузчик выполнен с возможностью его крепления на перевозочном транспортном средстве. В идеальном случае по данному аспекту изобретения грузоподъемные средства содержат вилочную каретку и вилы, закрепленные на соединительном рычажном элементе системы рычажных механизмов.
Предпочтительно по данному аспекту изобретения рычажный механизм регулирует угол между грузоподъемными средствами и вертикальной мачтой, в которой находится направляющая рычажного механизма, по мере того как грузоподъемные средства перемещаются между убранным и выдвинутым положением.
Дополнительное преимущество обеспечивается за счет возможности полного убирания звеньев внутрь направляющей, тем самым уменьшая количество выступающих звеньев системы.
По дополнительному аспекту изобретения любой из звеньев имеет регулируемую длину с любого торца для компенсации производственных допусков или, как вариант, для того, чтобы оператор мог регулировать наклон грузоподъемных средств.
По дополнительному аспекту изобретения предлагается колесный механизм стабилизации для использования с системой вылета, содержащей колесный узел, подвижно соединенный с поворотным узлом.
Следует понимать, что термин система вылета означает систему, которая позволяет изменять вылет грузоподъемных средств, таких, например, как подвижных мачт, телескопических вил или пантографных рычажных узлов, по дополнительному аспекту предлагается система вылета с грузоподъемными средствами, причем грузоподъемные средства могут быть любыми автономными съемными или регулируемыми вилами, приваренными вилами или, как вариант, вилочной кареткой, с прикрепленными к ней вилами или зубцами вил.
По дополнительному аспекту изобретения колесный узел содержит, по меньшей мере, одно колесо, установленное таким образом, чтобы ось вращения колеса проходила параллельно оси вращения шарнирного узла. Таким образом, во время эксплуатации привод, такой как подъемник, выдвигается, заставляя поворотный узел поворачиваться вокруг точки поворота, что в свою очередь прижимает колесный узел к несущей поверхности, в результате чего колесный узел вращается, или катится вдоль несущей поверхности.
По дополнительному аспекту изобретения колесный узел опционно также содержит привод, непосредственно соединенный с поворотным узлом.
Опционно колесный механизм стабилизации также содержит дополнительные и или рычаги для соединения гидроцилиндров или приводов в зависимости от предпочтений специалиста в данной области техники.
По дополнительному аспекту изобретения колесный механизм стабилизации содержит, по меньшей мере, одно колесо, установленное таким образом, чтобы ось вращения колеса проходила параллельно оси вращения шарнирного узла, а также, по меньшей мере, одно колесо, установленное таким образом, чтобы ось вращения колеса проходила перпендикулярно первому колесу и оси вращения шарнирного узла.
Опционно колесный механизм стабилизации по изобретению может устанавливаться либо на вилочную каретку, либо на вилы грузоподъемных средств. По дополнительному аспекту изобретения колесный механизм стабилизации может быть встроен в телескопические вилы.
По дополнительному аспекту изобретения вилы вилочного погрузчика оснащены колесным механизмом стабилизации, обеспечивающим боковое смещение вил при переносе груза вилами.
По дополнительному аспекту изобретения предлагается рычажный механизм для использования с системой вылета с установленным в ней колесным механизмом стабилизации.
Следует понимать, что обычные механизмы стабилизации также могут использоваться с рычажным механизмом по изобретению.
Также следует понимать, что хотя рычажный механизм по изобретению и колесный механизм стабилизации по изобретению были рассмотрены выше со ссылкой на однозвенную систему, при практическом осуществлении количество звеньев подобных систем может быть увеличено с учетом потребностей, а увеличенное количество звеньев может быть соединено при помощи различных поперечин, шпилек и т.п., известных специалистам в данной области техники.
Осуществление изобретения
Далее изобретение будет рассмотрено более подробно со ссылкой на прилагаемые чертежи, на которых в качестве примера показаны различные варианты осуществления изобретения.
На чертежах:
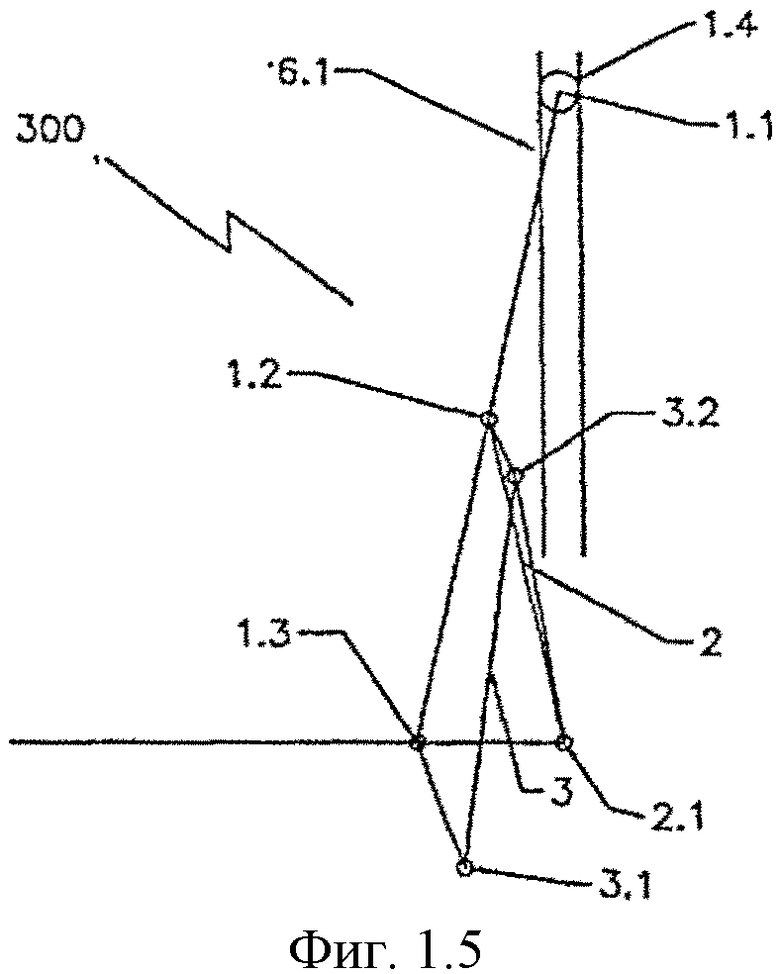
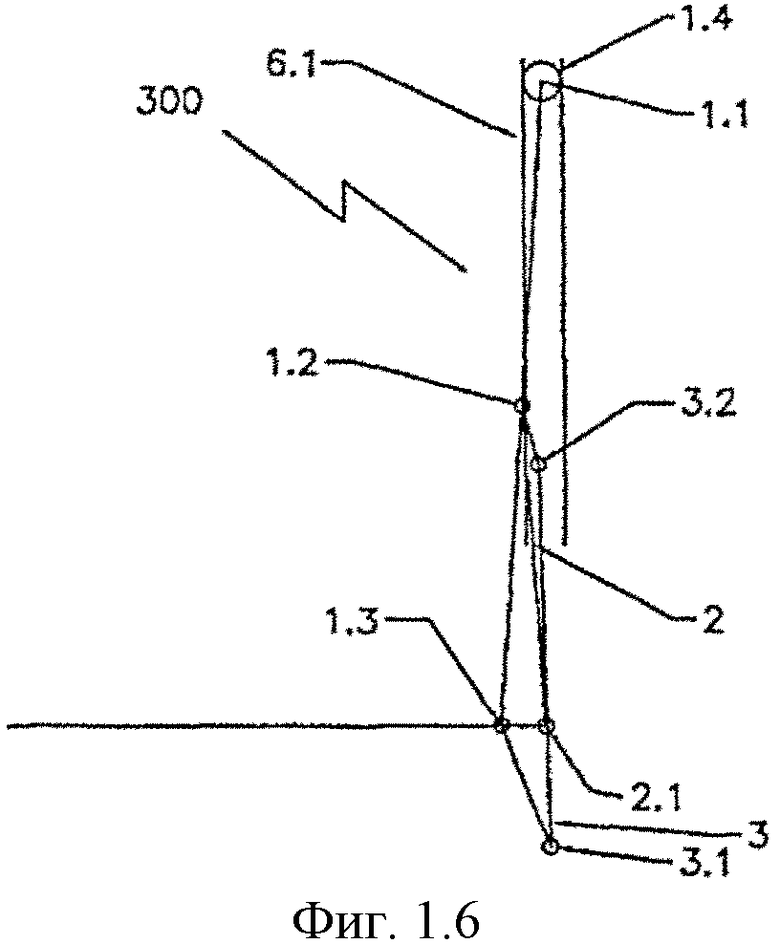
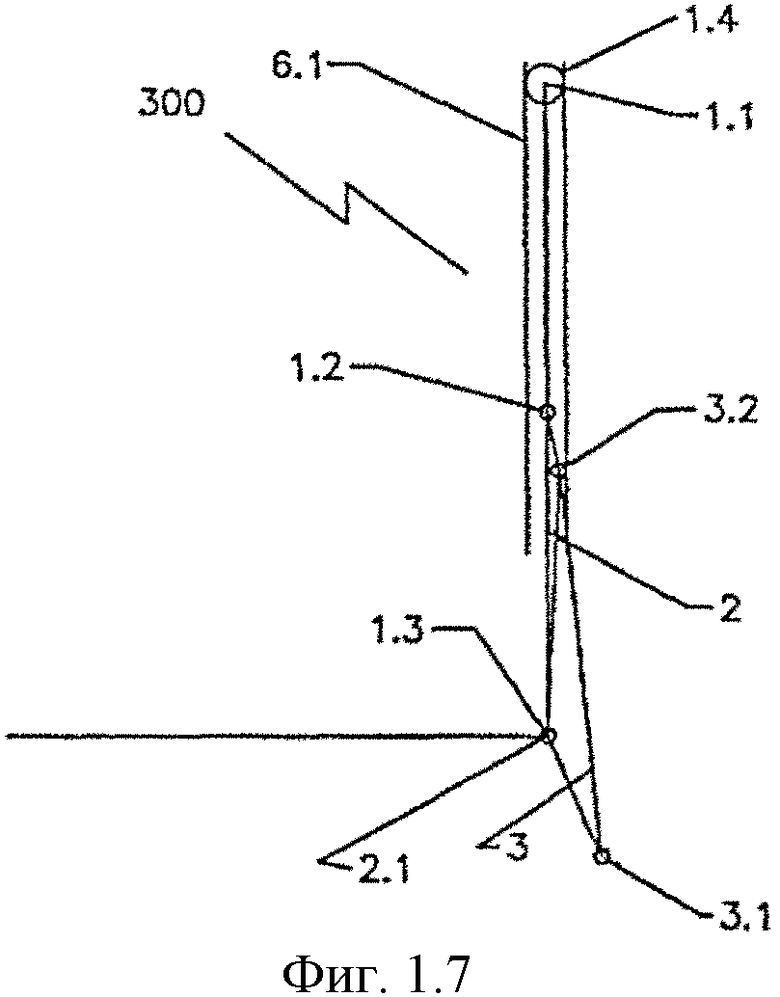
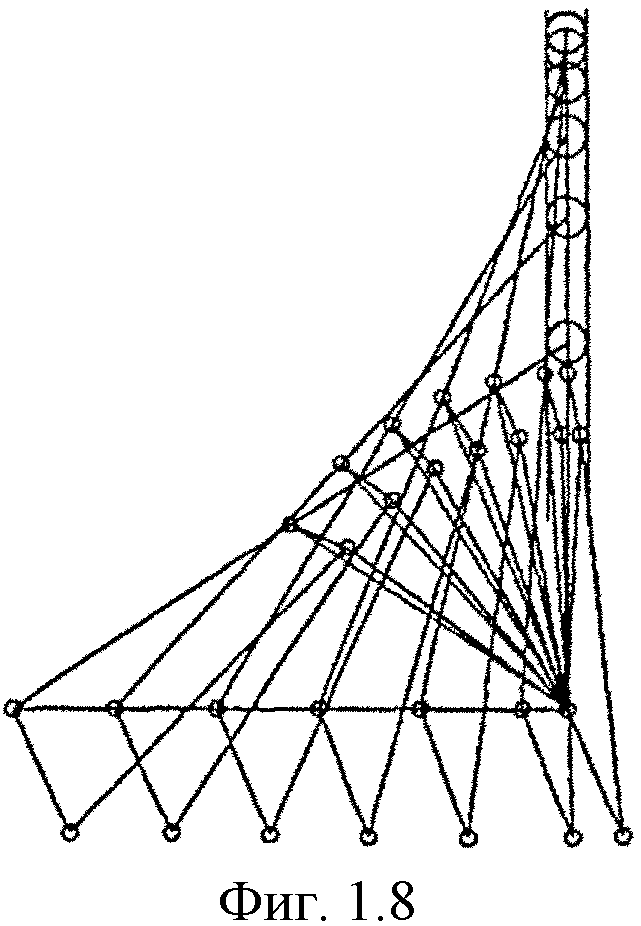
на фигурах с 1.1 по 1.8 показано движение точек рычажного механизма по изобретению в горизонтальной плоскости при перемещении из выдвинутого положения в убранное положение;
на фиг. 2.1 показан вид сбоку рычажного механизма по изобретению, закрепленного на грузоподъемных средствах, в выдвинутом положении;
на фиг. 2.2 показан вид сбоку рычажного механизма по изобретению, закрепленного на грузоподъемных средствах, в убранном положении;
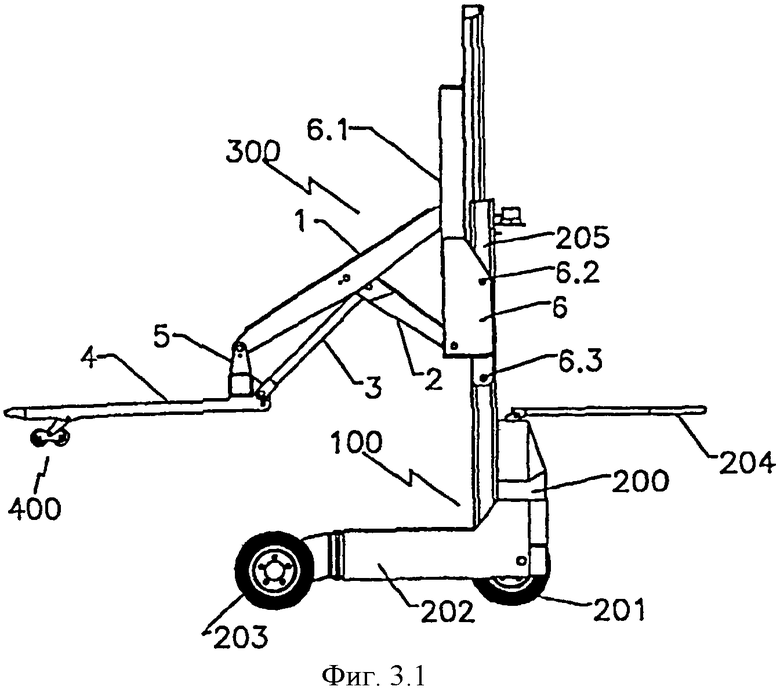
на фиг. 3.1 показан вид сбоку рычажного механизма по изобретению, закрепленного на ручном вилочном погрузчике, в выдвинутом положении;
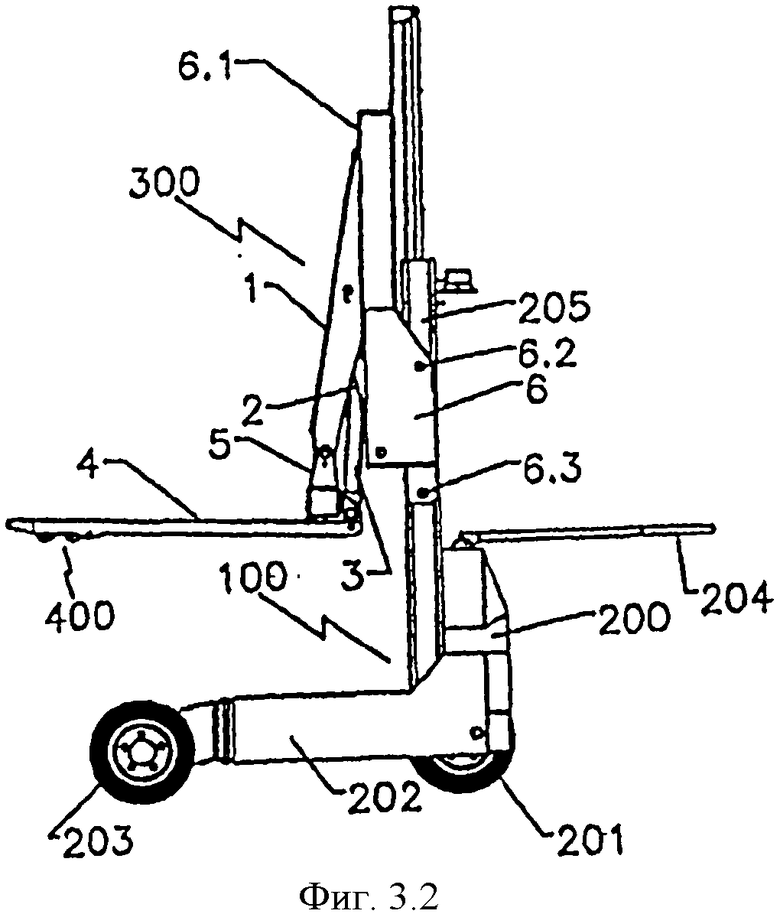
на фиг. 3.2 показан вид сбоку рычажного механизма по изобретению, закрепленного на ручном вилочном погрузчике, в убранном положении;
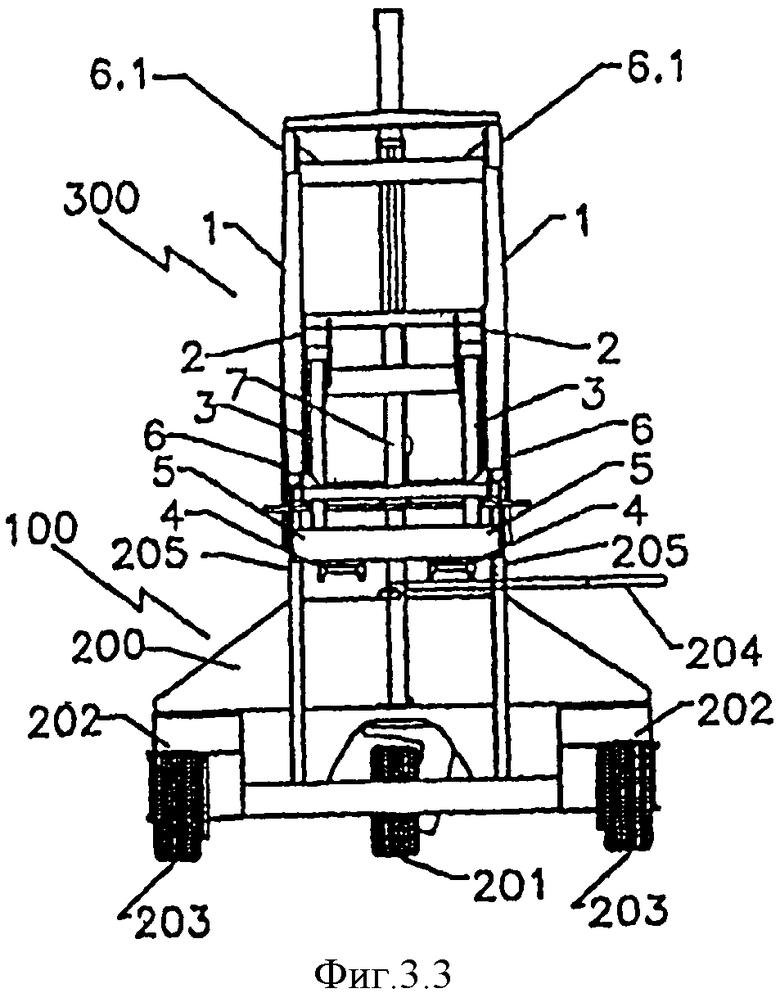
на фиг. 3.3 показан вид спереди рычажного механизма по фиг. 3.2;
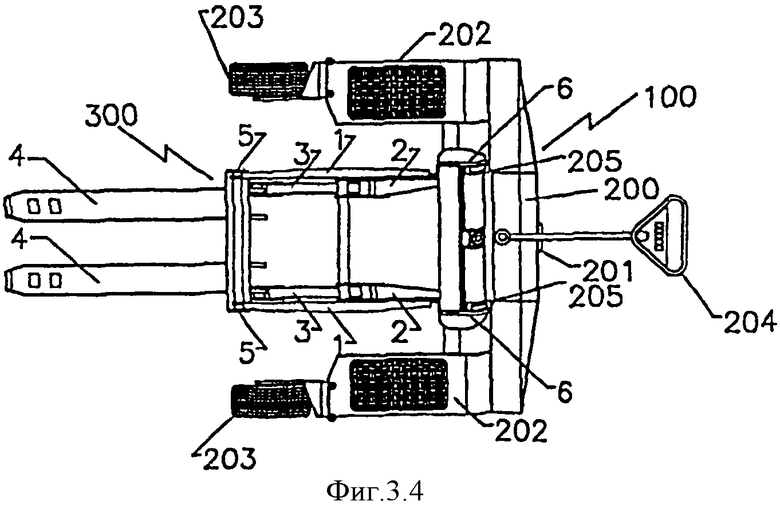
на фиг. 3.4 показан вид сверху рычажного механизма по фиг. 3.1;
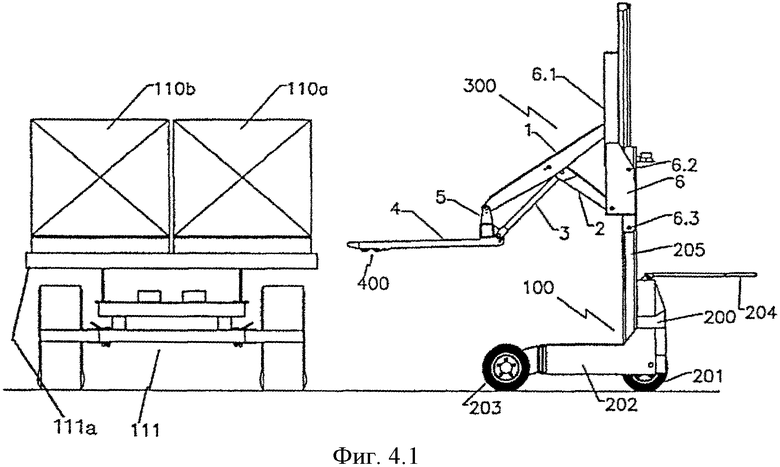
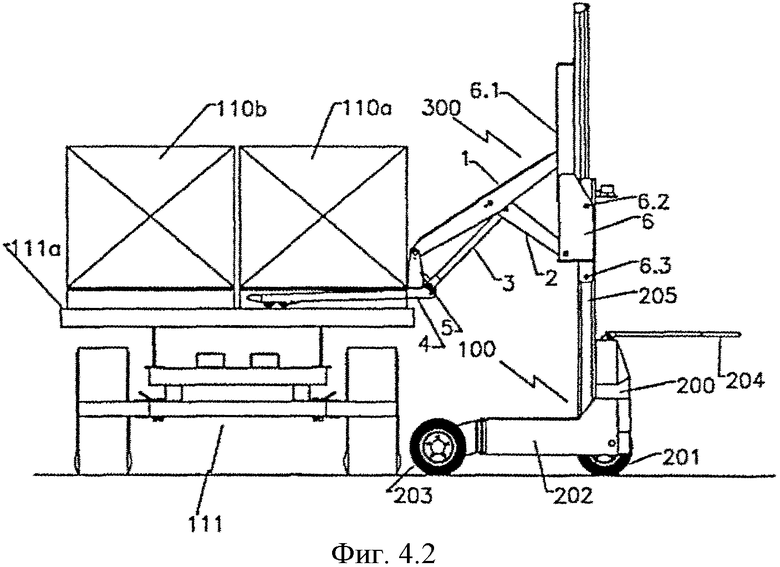
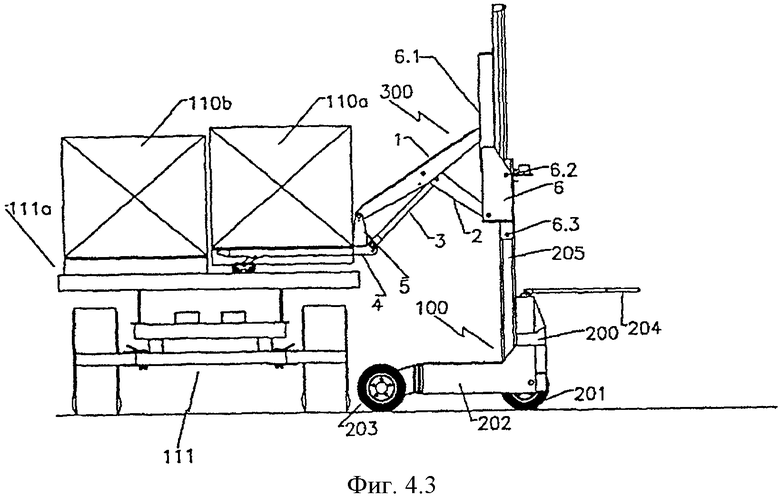
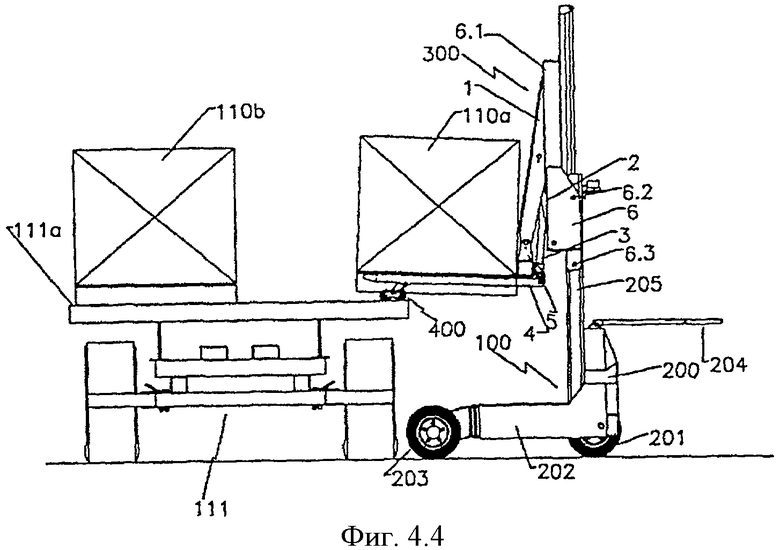
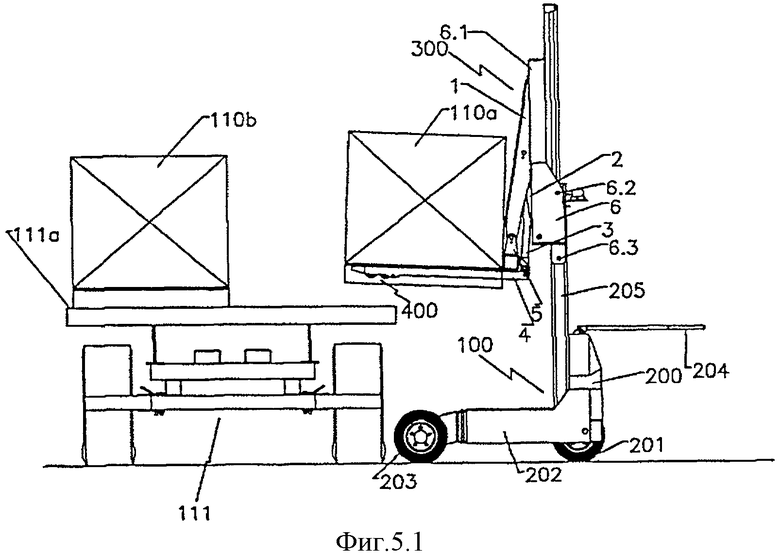
на фигурах с 4.1 по 4.4, а также на фиг. 5.1 показаны виды сбоку последовательности разгрузки с использованием рычажного механизма по изобретению, закрепленного на ручном вилочном погрузчике, при перемещении груза из первого положения с поднятой поверхности;
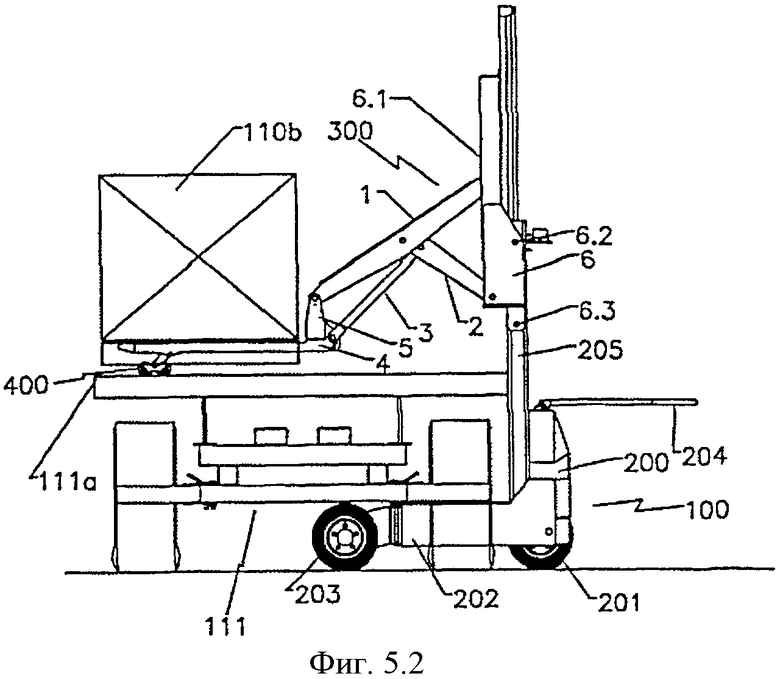
на фиг. 5.2 показан вид сбоку последовательности разгрузки с использованием рычажного механизма по изобретению, закрепленного на ручном вилочном погрузчике, при перемещении груза из второго положения с поднятой поверхности;
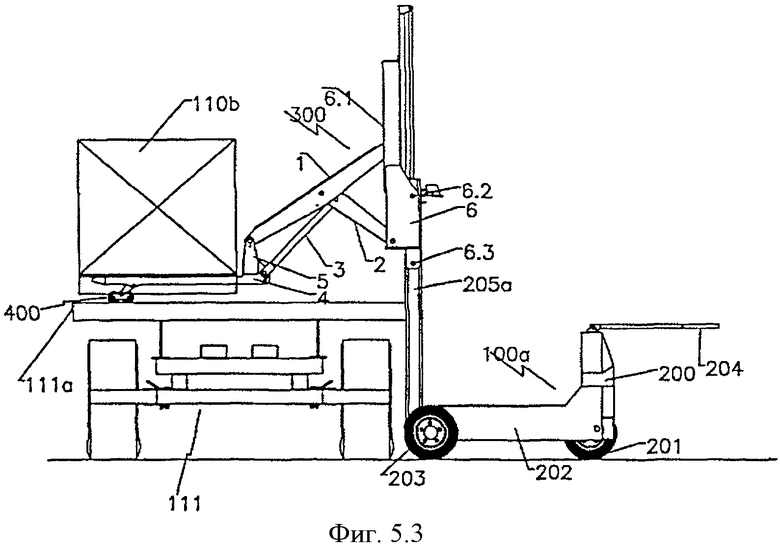
на фиг. 5.3 показан вид сбоку ручного вилочного погрузчика с рычажным механизмом по изобретению, закрепленным на подвижной мачте;
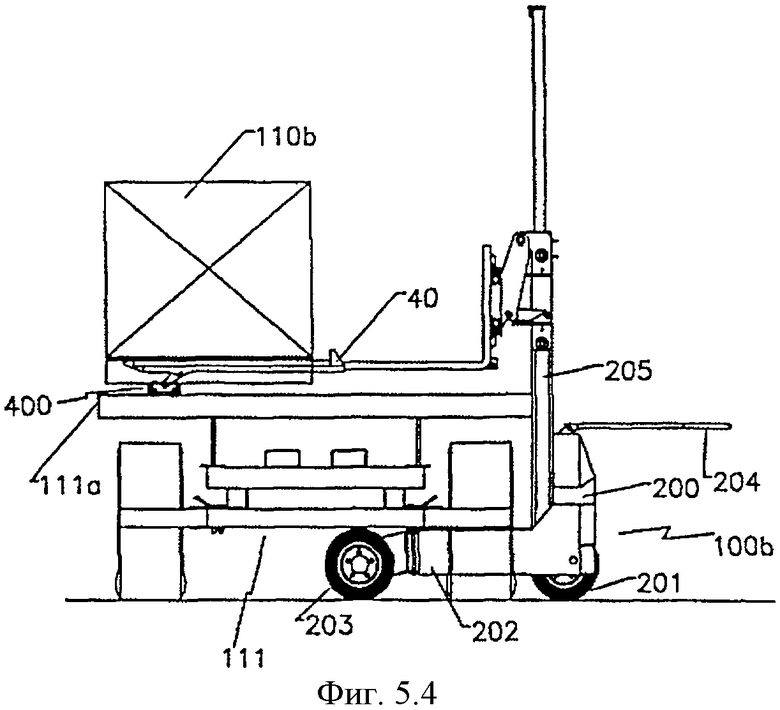
на фиг. 5.4 показан вид сбоку ручного вилочного погрузчика с колесным механизмом стабилизации по изобретению, закрепленным на телескопической вилочной системе;
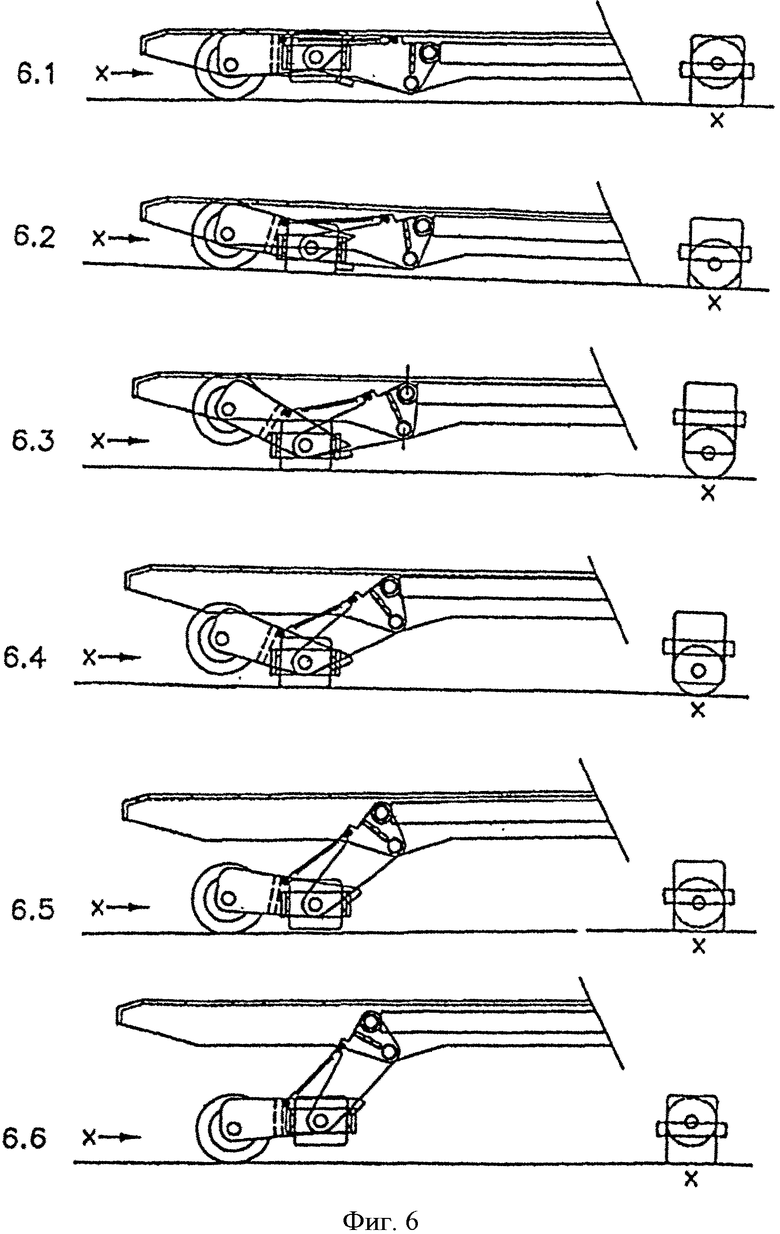
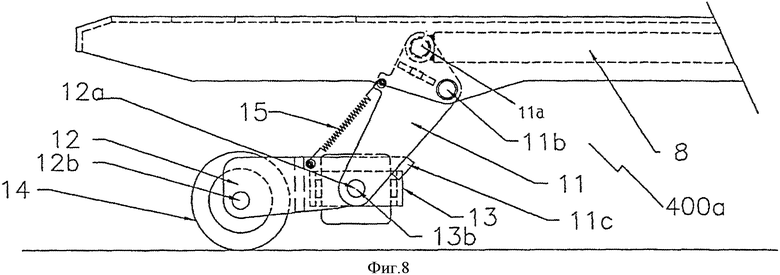
на фигурах с 6.1 по 6.6, а также на фиг. 8 показаны виды сбоку второго колесного механизма стабилизации по изобретению, а также этапы зацепления первого и второго колес во время работы гидроцилиндра;
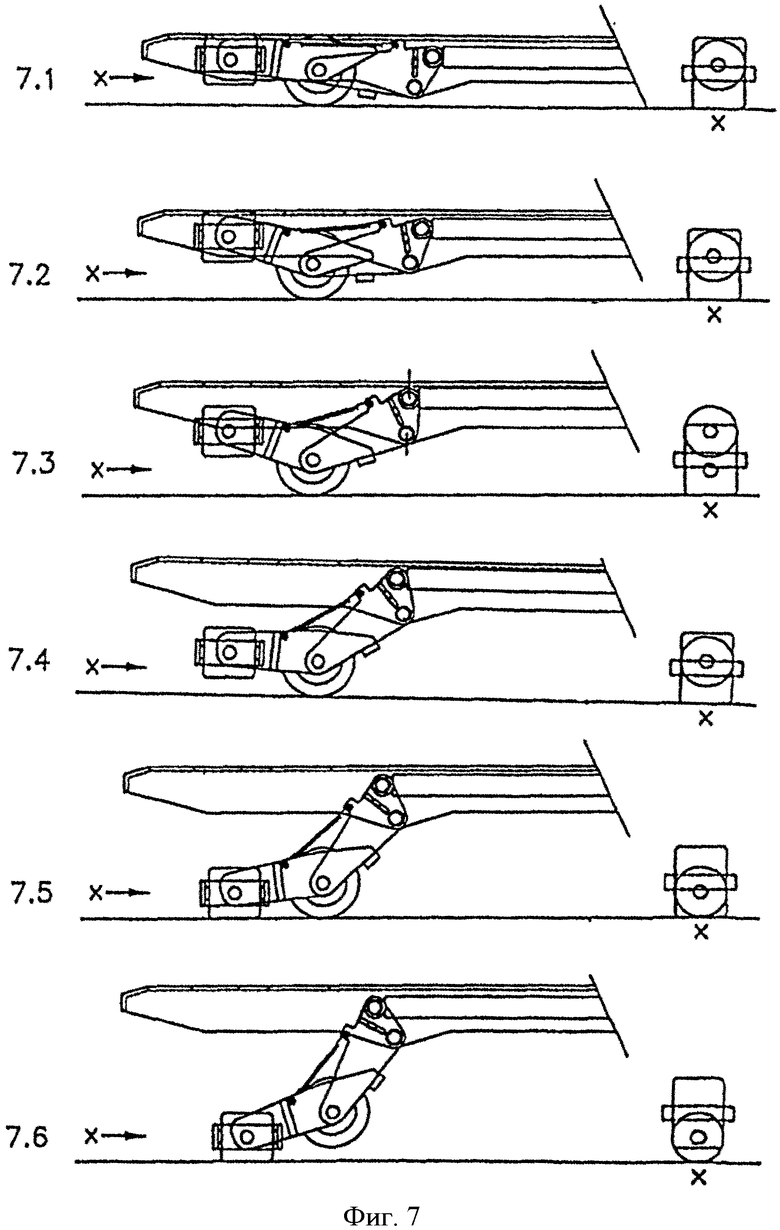
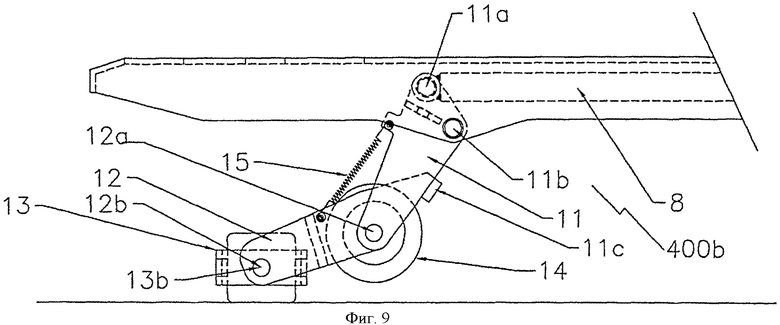
на фигурах с 7.1 по 7.6, а также на фиг. 9 показаны виды сбоку третьего колесного механизма стабилизации по изобретению, а также этапы зацепления первого и второго колес во время работы гидроцилиндра;
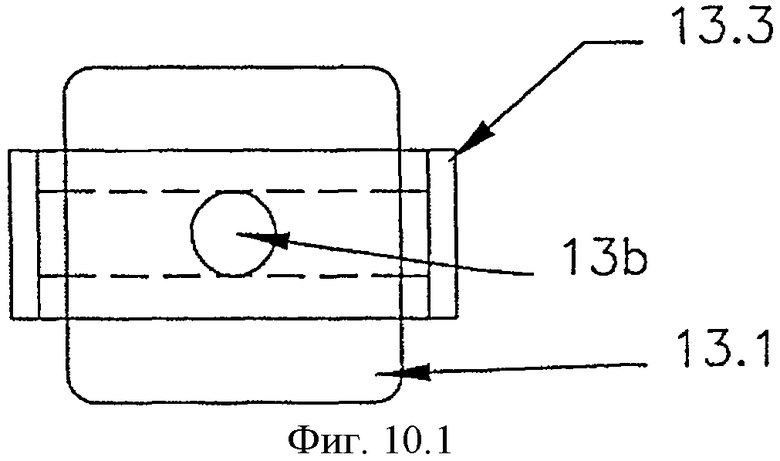
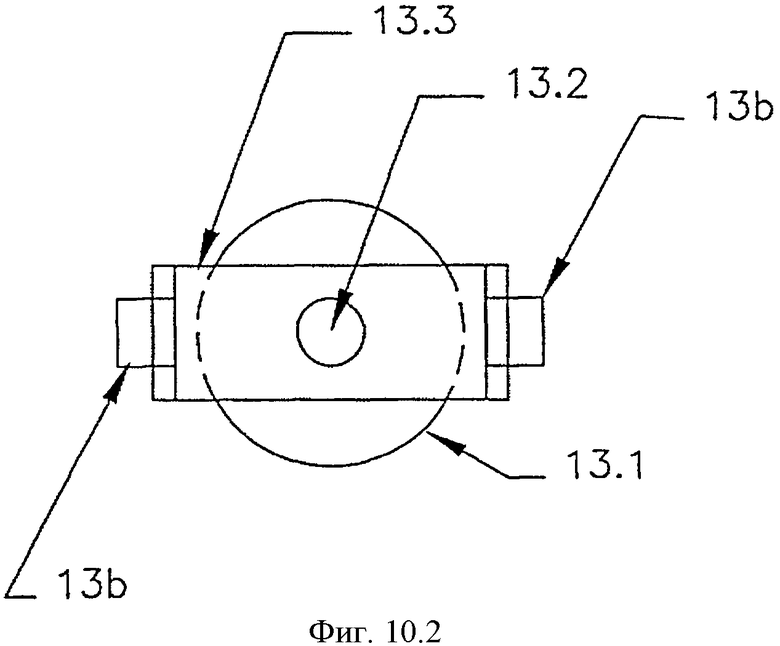
на фигурах 10.1 и 10.2 показаны первый и второй виды сбоку поперечного колесного узла колесного механизма стабилизации;
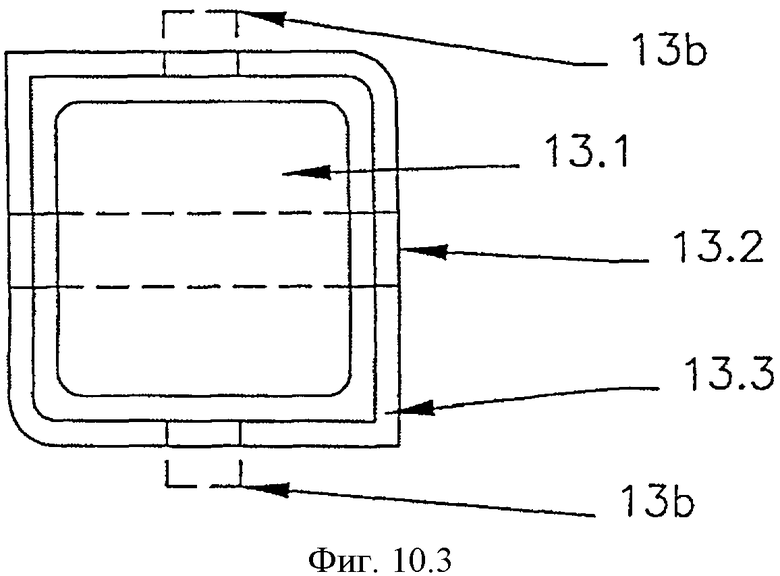
на фиг. 10.3 показан вид сверху поперечного колесного узла колесного механизма стабилизации;
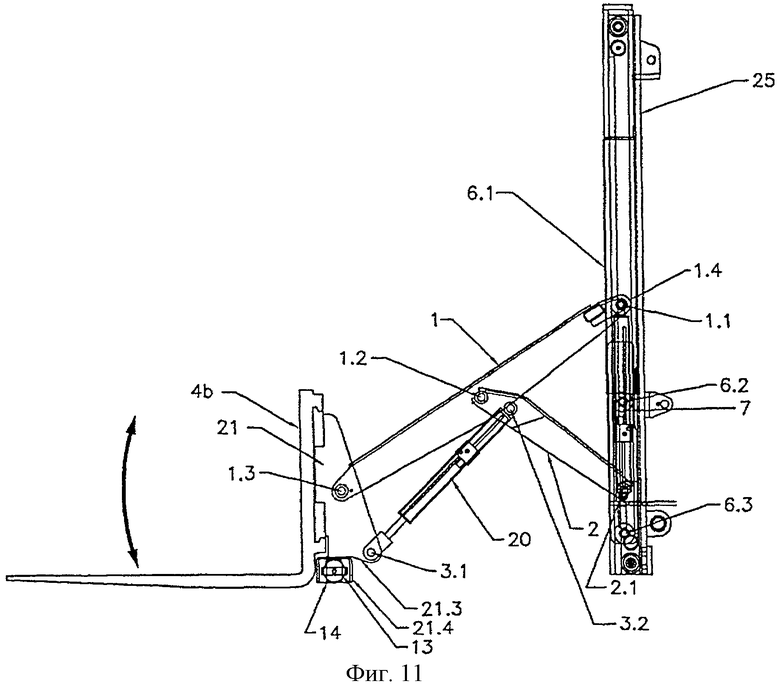
на фиг. 11 показан вид сбоку независимого наклонного рычажного механизма по изобретению, закрепленного на грузоподъемных средствах, в выдвинутом положении, в компоновке с небольшим количеством выступающих элементов внутри обычной спаренной мачты, также виден колесный узел стабилизации по изобретению, закрепленный на вилочной каретке; и
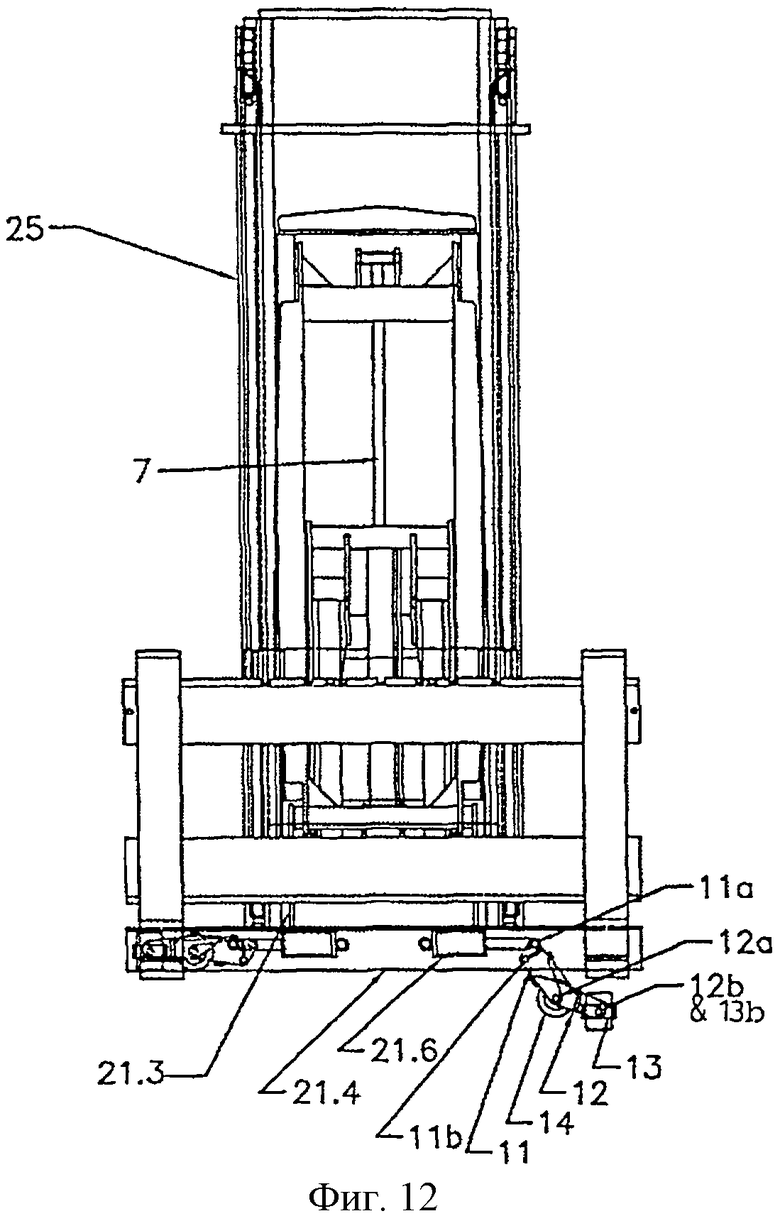
на фиг. 12 показан вид спереди по фиг. 11 в убранном положении.
На фиг. с 1 по 5.4 показан рычажный механизм, обозначенный, в целом, ссылочной позицией 300, который может использоваться в вилочном погрузчике 100, 100а и 100b, показанном, в частности, на фигурах 3, 4 и 5.
Вилочные погрузчики 100, 100а и 100b относятся к вилочным погрузчикам, известным как ручные штабелеры. Следует понимать, что рычажный механизм не ограничен использованием только с вилочными погрузчиками данного типа. Рычажный механизм по изобретению может использоваться в любых вилочных погрузчиках, известных специалистам в данной области техники. Вилочный погрузчик 100, 100а и 100b относится к общему типу, состоящему из U-образной рамы, содержащей основную раму 200, в которой установлено заднее рулевое колесо 201, приводимое двигателем (не показан) и управляемое рулевой рукояткой 204. От рамы основания на удалении от заднего рулевого колеса 201 отходит пара боковых рам 202. В каждой боковой раме 202 установлено переднее колесо 203. На основной раме 200 также закреплена вертикальная мачта 205, в которой установлен рычажный механизм 300 и вилы 4. Разумеется, следует понимать, что вилочный погрузчик по изобретению также содержит силовую установку со средствами управления всеми функциями вилочного погрузчика. Вилочные погрузчики 100, 100а и 100b отличаются друг от друга только средствами выдвижения механизма вылета вил. У вилочного погрузчика 100а имеется подвижная мачта 205а, тогда как у вилочного погрузчика 100b имеются телескопические вилы 40. Хотя это и не показано, следует понимать, что регулируемые вилы, средства выравнивания вил и механизмы бокового перемещения вил легко добавляются по мере необходимости в общую конструкцию вилочного погрузчика или механизма вылета.
На фиг. 2.1 и 3.1 показан вид сбоку рычажного механизма 300 по изобретению, соединяющий вертикальную мачту 205, находящуюся в первой плоскости, с вилами 4, находящимися во второй плоскости, так, что вилы 4 остаются расположены, по существу, перпендикулярно вертикальной мачте 205, когда рычажный механизм 300 находится в убранном или выдвинутом положениях. Для большей наглядности вертикальная мачта 205 показана в упрощенной компоновке с одной ступенью. Следует понимать, что рычажный механизм 300 может быть выполнен с возможностью использования с разными подъемными мачтами, состоящими из любого количества ступеней.
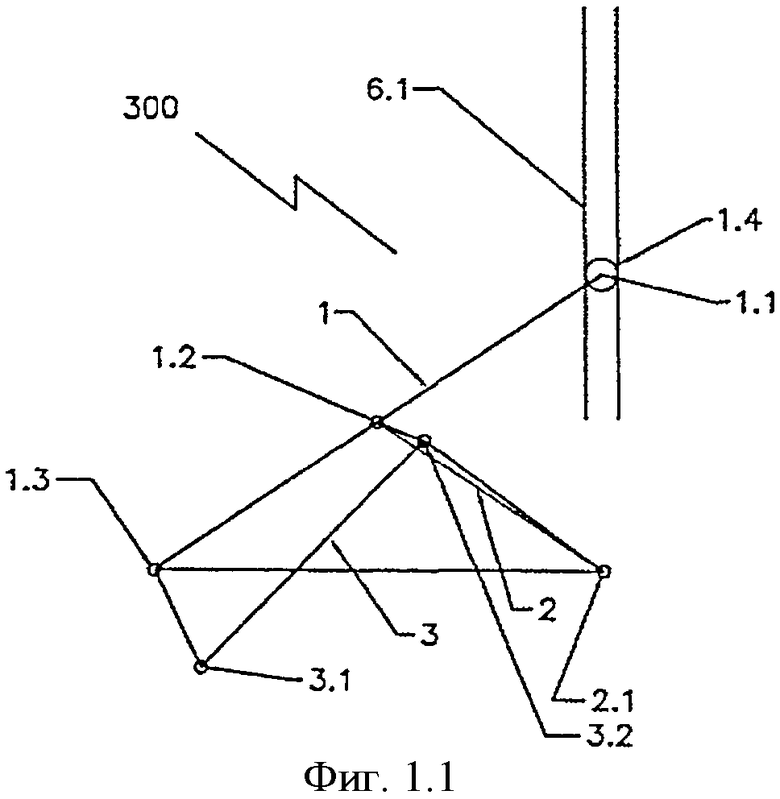
Рычажный механизм 300 содержит первый раскос 1, шарнирно соединенный с одного торца с роликом 1.4 в точке 1.1, которая может вертикально перемещаться внутри направляющей 6.1 установочной каретки/элемента 6, а с противоположного торца шарнирно соединенный с вилочной кареткой 5 в точке 1.3 поворота и с вилами 4. Второй раскос 2 шарнирно соединен с первым раскосом 1 в точке 1.2 поворота. Противоположный торец второго раскоса 2 шарнирно соединен с установочной кареткой/элементом 6 в точке 2.1 поворота. Точки поворота 1.1 и 2.1 расположены на или рядом с центральной линией направляющей 6.1. Угол наклона вил 4 и вилочной каретки 5 ограничен раскосом 3, который шарнирно соединен с одного торца со вторым раскосом 2 в точке 3.2 поворота, а с противоположного торца шарнирно соединен с вилочной кареткой 5 в точке 3.1 поворота. Во время эксплуатации раскос 3 заставляет вилочную каретку 5 поворачиваться вокруг точки 1.3 поворота для компенсации постоянно меняющегося угла первого раскоса 1, поддерживая при этом, в целом, постоянный угол относительно направляющей 6.1, обеспечивая тем самым расположение вил 4, по существу, в горизонтальном положении в течение всего перемещения звеньев рычажного механизма. Перемещение звеньев рычажного механизма 300 осуществляется гидроцилиндром 7, который шарнирно соединен с установочной кареткой/элементом 6 в точке 7.1, а также с первым раскосом 1 в точке 1.1 поворота. В альтернативной компоновке гидроцилиндр 7 может быть установлен в любом соответствующем положении на первом раскосе 1 либо на втором раскосе 2. Вместо использования установочной каретки/элемента 6 гидроцилиндр также можно установить непосредственно между первым раскосом 1 и вторым раскосом 2. Следует понимать, что на усмотрение специалиста в данной области техники может использоваться любое количество гидроцилиндров.
По данному варианту осуществления изобретения второй раскос 2 соединен с первым раскосом 1 таким образом, чтобы все расстояния между точками поворота с 1.1 по 1.2, с 1.2 по 1.3 и с 1.2 по 2.1 были одинаковыми.
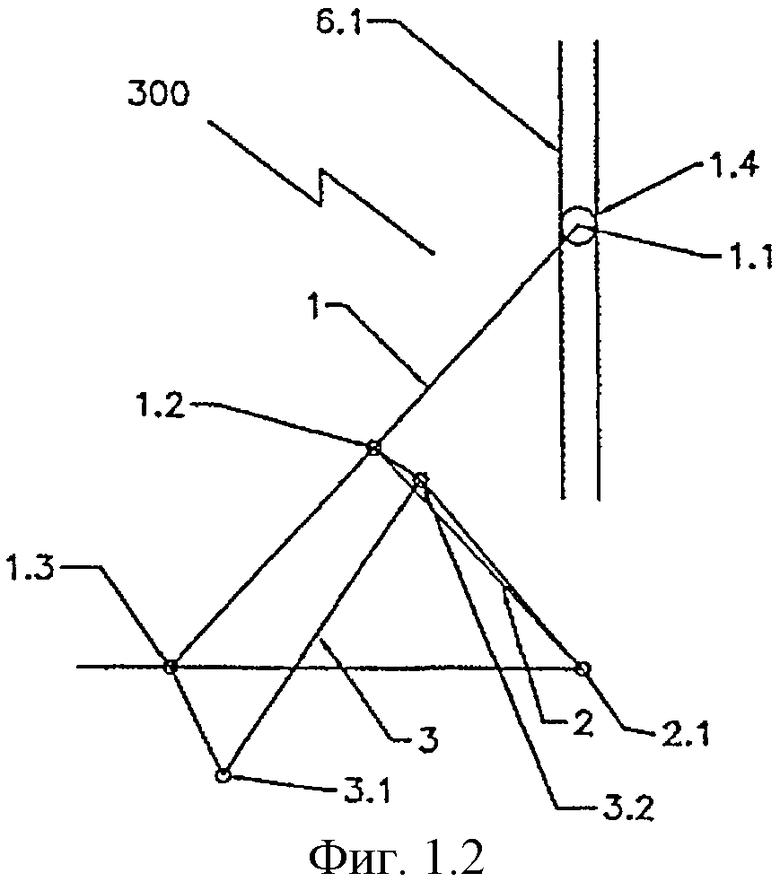
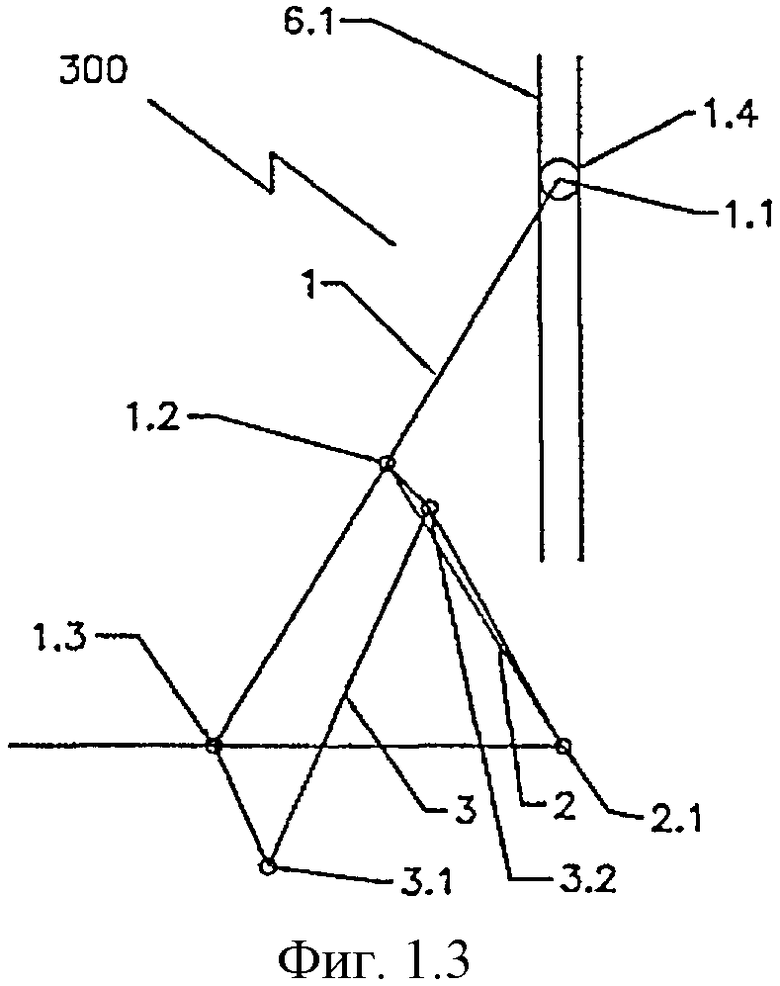
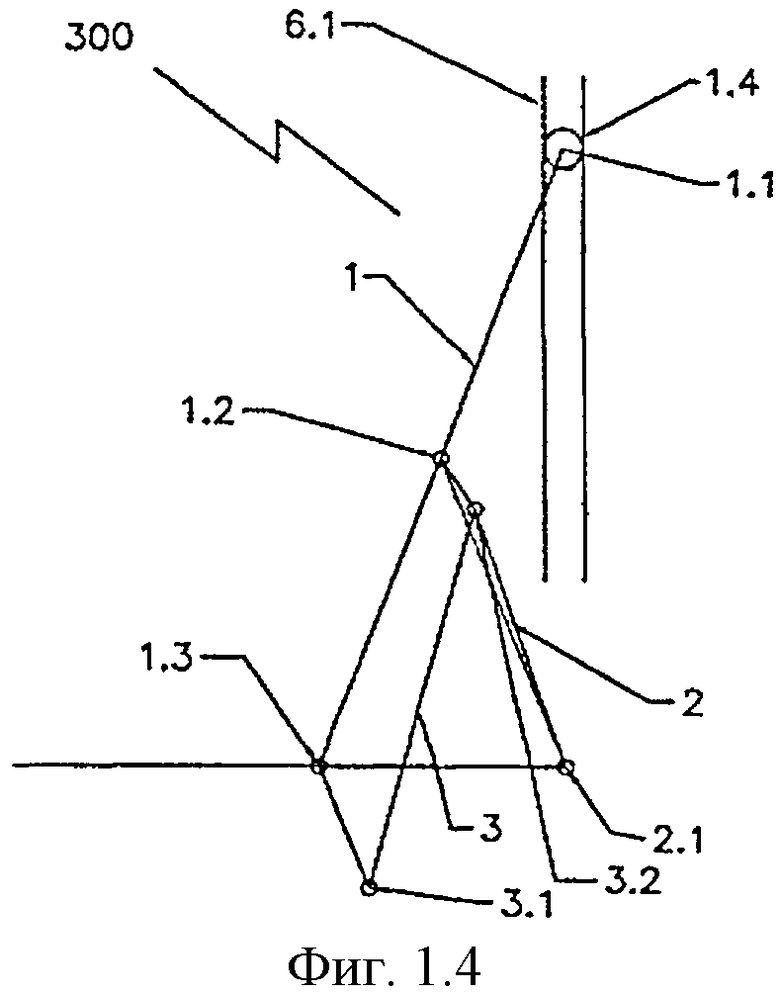
На фигурах с 1.1 по 1.8 показано перемещение звеньев рычажного механизма 300. Усилие, прикладываемое гидроцилиндром 7, перемещает точку 1.1 поворота вдоль направляющей 6.1 в первой плоскости, а точка 1.3 поворота перемещается, по существу, вдоль второй плоскости, которая перпендикулярна первой плоскости, вне зависимости от положения точек поворота 3.1 или 3.2. На фиг. 1.1 показан рычажный механизм 300 в полностью выдвинутом положении. На фигурах с 1.2 по 1.7 показано перемещение точек поворота звеньев вдоль осей «х» и «у» при переводе рычажного механизма 300 в убранное положение. В частности со ссылкой на фиг. 1.7 показано, каким образом звенья рычажного механизма 300 полностью убираются в направляющую 6.1. В полностью убранном положении точки поворота 1.1 и 2.1, также как и точки 1.2 и 1.3, расположены на или рядом с центральной линией направляющей 6.1. Точка 3.1 поворота расположена сзади от центральной линии направляющей 6.1, позволяя тем самым рычажному механизму 300 полностью убираться в направляющую 6.1, сохраняя при этом конструктивную прочность. Это существенно уменьшает количество выступающих звеньев при установке вилочного погрузчика на транспортном средстве. На фиг. 1.8 показано наложение точек перемещения по фигурам с 1.1 по 1.7, допустимых рычажным механизмом 300.
Как отмечалось выше, раскос 3 определяет угол установки вил 4 и вилочной каретки 5 относительно направляющей 6.1, а следовательно, установочную каретку/элемент 6. Основное назначение раскоса 3 заключается в удержании вил 4, в целом, в горизонтальном положении во время их перемещения из выдвинутого в убранное положение; между тем незначительное изменение положения точек поворота 3.1 и/или 3.2 во время подобного перемещения приводит изменению угла установки вилочной каретки 5. Это может быть предпочтительным, поскольку позволяет производить точную настойку рычажного механизма 300, например осуществлять автоматический наклон вниз на постоянный угол при выдвижении рычажного механизма 300, а также автоматический наклон вверх на постоянный угол при убирании рычажного механизма 300. Подобная опция может использоваться как альтернатива независимой системе наклона или для точной настройки с целью компенсации изгибающих моментов при выдвижении рычажного механизма.
В целях упрощения восприятия в описании рычажного механизма и колесных механизмов стабилизации, звенья рассматриваются как одиночные детали. Между тем при практическом осуществлении подобных систем большинство звеньев дублируются и соединены при помощи различных поперечин, шпилек и т.п., многие из которых можно увидеть на виде спереди, в вертикальной проекции на фиг.3.3 и на виде в плане по фиг. 3.4. Кроме этого, рычажные механизмы могут располагаться ярусно тем или иным образом. На фиг. 3.3 показана направляющая 6.1 без основных звеньев рычажного механизма 300, следующим звеном в последовательности является первый раскос 1, затем второй раскос 2 и, наконец, раскос 3 в убранном положении. Следует понимать, что для осуществления одного и того же перемещения звенья рычажного механизма 300 могут быть расположены в любой последовательности. Также следует понимать, что, хотя рычажный механизм 300 представлен с опорой на ролик 1.4, также могут использоваться любые другие подвижные средства, обеспечивающие поворот вместе с поступательным перемещением внутри направляющей 6.1, например, с помощью износостойкой накладки.
Хотя это и не показано, подразумевается, что на каждом конце звеньев может быть расположено звено регулируемой длины для компенсации производственных допусков или, как вариант, позволяющее оператору регулировать наклон грузоподъемных средств. Колесный механизм 400 стабилизации на фигурах 2.1 и 2.2 показан как составная часть вил 4. На фиг. 2.1 узел показан в полностью развернутом положении, а на фиг. 2.2 - полностью убранном положении. Поворотный узел 11 шарнирно соединен с вилами 4 в точке 11b поворота. Поворотный узел 11 также соединен с колесным узлом 10 в точке 12а поворота, а с гидроцилиндром 8 - в точке 11а поворота. Гидроцилиндр 8 также шарнирно соединен с вилами 4 в точке 8а поворота. Колесный узел 10 показан с двумя передними колесами; между тем следует понимать, что для упрощения конструкции колесный узел 10 может быть заменен на одно переднее колесо, установленное в точке 12а поворота. Во время эксплуатации гидроцилиндр 8 поворачивает узел 11 вокруг точки 11b, прижимая колесный узел 10 к несущей поверхности, тем самым поднимая вилы 4 на достаточное расстояние так, чтобы между грузом и несущей поверхностью создавался зазор.
На фигурах 11 и 12 показан другой вариант осуществления рычажного механизма 300, включающего в себя несколько узлов, которые могут использоваться как по отдельности, так и в комбинации. Рычажный механизм 300 показан в усеченном варианте и установлен внутри стандартной спаренной мачты 25. Для большей наглядности спаренная мачта 25 показана в базовой комплектации без гидроцилиндров, цепей и роликов. У модифицированной установочной каретки/элемента 6 имеются подшипниковые установочные элементы 6.2 и 6.3, оснащенные обращенными наружу роликовыми подшипниками (не показаны), которые контактируют с соответствующими внутренними направляющими спаренной мачты 25 таким образом, чтобы точки поворота 1.1 и 2.1, а также направляющая 6.1 находились на или рядом с центральной линией спаренной мачты 25. Подобная установочная компоновка позволяет устанавливать рычажный механизм 300 на различных типах мачт вилочных погрузчиков компактно с малым количеством выступающих звеньев.
Следует понимать, что на разных типах кареток вилочных погрузчиков могут устанавливаться любые соответствующие типы грузоподъемных средств, позволяющие соответствующим образом размещать точки поворота 1.3 и 3.1. На фиг. 11 показан рычажный механизм 300 со стандартными вилами 22, установленными на другую вилочную каретку 21. Вместе с рычажным механизмом 300 могут использоваться различные типы вилочных позиционирующих устройств, устройств бокового смещения вил или колесных механизмов стабилизации.
В данном варианте осуществления рычажного механизма раскос 3 постоянной длины заменен на гидроцилиндр 20, выступающий в качестве независимого механизма наклона. При выдвижении гидроцилиндра 20 вилочная каретка 21 наклоняется или поворачивается вверх без перемещения раскоса 1 или 2. Разумеется, ход гидроцилиндра 20 может быть рассчитан таким образом, чтобы обеспечивался максимальный наклон вперед или назад, по мере необходимости. Предпочтительно, чтобы наклон начинался от или рядом с вилочной кареткой, таким образом, чтобы не происходило кратного увеличения момента при выдвижении механизм вылета, напряжение уменьшалось, а управляемость улучшалась.
На фигурах с 4.1 по 4.4, а также с 5.1 по 5.2 изображен вилочный погрузчик 100, поднимающий грузы 110а и 110b с поднятой поверхности 111a, в данном случае с прицепа 111. На фиг. 4.1 рычажный механизм 300 по фиг. 2.1 соединен с вилочным погрузчиком 100 в выдвинутом положении, тогда как колесный механизм 400 стабилизации показан в убранном положении. На фиг. 4.2 вилочный погрузчик 100 переместился вперед таким образом, чтобы вилы 4 вошли в зацепление с грузом 110а. После полного зацепления вил колесный механизм 400 стабилизации развертывается и опирается на поверхность 111a прицепа 111, как это показано на фиг. 4.3. После того как колесный механизм 400 стабилизации полностью опущен, он поднимает груз 110а относительно поверхности 111a прицепа, а следовательно, большая часть груза приходится на колесный узел 10 колесного механизма 400 стабилизации. Груз 110а убирается рычажным механизмом 300, при этом колесный узел 10 колесного механизма 400 стабилизации обеспечивает плавное перемещение груза, как это показано на фиг. 4.4. Вилочный погрузчик 100 почти не воспринимает груз 110а до этого момента и безопасно поднимает груз, отрывая его от прицепа 111, при этом рычажный механизм 300 находится в полностью убранном положении, как это показано на фиг. 5.1.
На фиг. 5.2 показано, что вилочный погрузчик 100 зацепляет второй груз 100b, находящийся в глубине прицепа, точно так же, как и только что рассмотренный груз 110а. В данном случае передние колеса вилочного погрузчика 100 проходят под прицепом 111 для занятия соответствующего положения.
Между тем в отдельных случаях это может быть невозможно из-за более крупных колес вилочного погрузчика или более низких элементов прицепа, ограничивающих доступ. На фиг. 5.3 показана другая компоновка, состоящая из вилочного погрузчика 100а с подвижной мачтой, рычажного механизма 300 и колесного механизма 400 стабилизации. Точно также колесный механизм 400 стабилизации воспринимает груз 110b, тогда как рычажный механизм 300 убирает груз. После этого подвижная мачта убирается (не показано) до тех пор, пока груз не будет безопасно поднят. На фиг. 5.4 показано, что колесный механизм 400 стабилизации также может использоваться и с другими системами вылета. В данном случае вилочный погрузчик оборудован модифицированными телескопическими вилами 40, включающими в себя колесный механизм 400 стабилизации. Эксплуатация системы осуществляется аналогично рассмотренной ранее.
На фигурах 6, 7, 8 и 9 показаны дополнительные варианты осуществления колесного механизма 400 стабилизации 400а и 400b соответственно. Оба колесных механизма 400а и 400b стабилизации оснащены узлами поперечных колес, позволяющих оператору использовать механизм бокового смещения вил вилочного погрузчика, что невозможно в первом варианте осуществления колесного механизма 400 стабилизации.
На фигурах с 6.1 по 6.6, а также на фиг. 8 показан колесный механизм 400а стабилизации. В частности, на фигурах с 6.1 по 6.6 показана последовательность этапов с использованием второго варианта осуществления колесного механизма 400а стабилизации, между тем во время эксплуатации будет происходить непрерывное изменение положений с 6.1 по 6.4, а затем с 6.4 по 6.6. На фиг. 6.1 узел показан в полностью убранном положении. В данном положении используется прямое колесо 14, а поперечное колесо 13 поднято, обеспечивая зазор для захода палеты и плавного перемещения вперед. На фигурах с 6.2 по 6.4 показано опускание узла 13 поперечного колеса за счет выдвижения гидроцилиндра 8, при этом прямое колесо 14 удерживается в поднятом положении относительно стопорной плиты 11с при помощи пружины 15 натяжения. На фигурах 6.5 и 6.6 показан переход к полностью выдвинутому положению колесного механизма 400а стабилизации за счет дополнительного выдвижения гидроцилиндра 8. В подобном, полностью выдвинутом положении прямое колесо 14 полностью соприкасается с несущей поверхностью, а узел 13 поперечного колеса находится в поднятом, нерабочем положении.
На фиг. 8, а также на фиг. с 10.1 по 10.3 поворотный узел 11 шарнирно соединен с вилами 4 в точке 11b поворота. Поворотный узел 11 также соединен с колесными соединительными средствами 12 в точке 12а поворота, а также с гидроцилиндром 8 в точке 11а поворота. Пружина 15 натяжения также соединяет поворотный узел 11 с колесными соединительными средствами 12. Прямое колесо 14 соединено с колесными соединительными средствами 12 в точке 12b поворота, а узел 13 поперечного колеса шарнирно соединен с соединительными средствами 12 в точке 12а поворота. На фигурах с 10.1 по 10.3 показан узел 13 поперечного колеса при виде в вертикальной проекции, в плане, а также при виде с торца соответственно. Колесо 13.1 соединено с шарнирной люлькой 13.3 через ось 13.2, проходящую перпендикулярно установочной точке 13b поворота. Точка 13b поворота, в свою очередь, соединена с колесными соединительными средствами 12 в точке 12а поворота. Подобная компоновка обеспечивает возможность поворота узла 13 поперечного колеса во время использования колесного механизма 400 стабилизации, обеспечивая надлежащий контакт с несущей поверхностью.
На фигурах с 7.1 по 7.6, 9, а также с 10.1 по 10.3 показан колесный механизм 400b стабилизации. Так же, как и ранее, на фигурах с 7.1 по 7.6 показана последовательность этапов с использованием третьего варианта осуществления колесного механизма 400b стабилизации. Обычно, для использования колесного механизма 400b стабилизации его необходимо полностью выдвинуть перед боковым смещением вил 4 при помощи узла 13 поперечных колес, а затем немного опустить груз для повторного зацепления прямого колеса 14 перед убиранием рычажного механизма 300 или любой другой соответствующей системы вылета. Это достигается так же, как это было рассмотрено ранее, с использованием стопорной плиты 11с и пружины 15 натяжения. На фиг. 7.1 прямое колесо 14 используется в полостью убранном положении, при этом поперечное колесо 13 поднято, обеспечивая зазор для захода палеты. На фигурах с 7.2 по 7.4 показано выдвижение гидроцилиндра, в результате чего вилы 4 поднимаются, а прямое колесо 14 опускается до тех пор, пока вилы 4 не совершат примерно три четверти такта, в результате чего палета поднимается. На фигурах 7.5 и 7.6 показан переход к полностью выдвинутому положению колесного механизма 400b стабилизации за счет дополнительного выдвижения гидроцилиндра 8. В подобном, полностью выдвинутом положении узел 13 поперечного колеса полностью соприкасается с несущей поверхностью, а прямое колесо 14 находится в поднятом, нерабочем положении.
Далее, в частности, со ссылкой на фиг. 9, а также на фигуры с 10.1 по 10.3 показан поворотный узел 11, шарнирно соединенный с вилами 4 в точке 11b поворота. Поворотный узел 11 также соединен с колесными соединительными средствами 12 в точке 12а поворота, а с гидроцилиндром 8 - в точке 11а поворота. Пружина 15 натяжения также соединяет поворотный узел 11 с колесными соединительными средствами 12. Прямое колесо 14 соединено с колесными соединительными средствами 12 в точке 12а поворота, а узел 13 поперечного колеса шарнирно соединен с соединительными средствами 12 в точке 12b поворота. На фигурах с 10.1 по 10.3 показан узел 13 поперечного колеса при виде в вертикальной проекции, в плане, а также при виде с торца соответственно. Колесо 13.1 соединено с шарнирной люлькой 13.3 через ось 13.2, проходящую перпендикулярно установочной шарнирной точке 13b. Точка 13b поворота, в свою очередь, соединена с колесными соединительными средствами 12 в точке 12b поворота. Подобная компоновка обеспечивает возможность поворота узла 13 поперечного колеса во время использования колесного механизма 400 стабилизации, обеспечивая надлежащий контакт с несущей поверхностью.
Как показано на фигурах 11 и 12, колесный механизм 400, 400а и 400b стабилизации также может быть установлен на вилочной каретке. Колесный механизм 400b стабилизации устанавливается снизу вилочной каретки 21. Во время эксплуатации поперечные колеса 14 соприкасаются с поверхностью в первой точке до тех пор, пока вилы не будут подняты и не поднимут груз. С этого момента прямое колесо 13 начинает соприкасаться по всей высоте, позволяя убирать груз.
Следует понимать, что оба колеса опускаются одновременно, между тем на фигурах 11 и 12 для большей наглядности один колесный механизм стабилизации показан поднятым, а другой колесный механизм стабилизации - опущенным.
Колесные механизмы 400, 400а и 400b стабилизации могут приводиться в действие за счет размещения гидроцилиндра на других частях вил 4 или вилочной каретки 21 либо за счет непосредственного сопряжения, как это показано, либо за счет использования тяг, рычагов или поворотных соединений. Двое вил также могут приводиться одним гидроприводом при помощи простой рычажной системы.
Рычажный механизм 300 по изобретению может быть оснащен стандартной вилочной кареткой или любым другим устройством бокового смещения вил или вилочной кареткой устройства позиционирования вил как с колесным механизмом 400, 400а и 400b стабилизации, так и без него.
В целом, стандартные мобильные вилочные погрузчики способны поднимать груз, равный примерно 30% от веса порожнего вилочного погрузчика в полностью выдвинутом положении в случае оснащения их единственной системой вылета, например, поднимать первый груз 110а, а также способны поднимать груз, примерно равный 100% от веса порожнего вилочного погрузчика в случае использования передних домкратных ножек. В случае использования двойной системы вылета с домкратными ножками подъемная способность вновь снижается примерно до 30% от веса порожнего вилочного погрузчика, так, например, для того чтобы поднять груз весом 1000 кг в загрузочном положении 10b, потребуется 3-тонный вилочный погрузчик. В свою очередь, раздвоенный мобильный погрузчик, оборудованный вышеупомянутым колесным механизмом стабилизации, может существенно увеличить номинальную грузоподъемность вилочного погрузчика определенного веса, поскольку единственным сдерживающим фактором является конструктивная прочность и мощность системы вылета в убранном положении. Следовательно, вилочный погрузчик подобного типа может поднимать грузы, вес которых составляет 200% от его собственного порожнего веса с единственной системой вылета из положения 110а либо с двойной системой вылета из положения 110b как с использованием домкратных ножек, так и без них, так, например, вилочный погрузчик данного типа с массой 1000 кг способен поднимать груз весом более 2000 кг.
Разумеется, следует понимать, что изобретение не ограничено рассмотренными здесь конкретными примерами, и допускает различные изменения и модификации, не выходящие за объем изобретения, определенный в пунктах формулы изобретения с 1 по 23.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК ТЕЛЕСКОПИЧЕСКИЙ | 2022 |
|
RU2785824C1 |
| ВИЛОЧНЫЙ ПОГРУЗЧИК | 1991 |
|
RU2025462C1 |
| Передвижная мачта освещения телескопического типа | 2022 |
|
RU2795671C1 |
| РАБОЧАЯ ПЛАТФОРМА НА ВИЛОЧНОМ ПОГРУЗЧИКЕ | 1991 |
|
RU2021972C1 |
| Кантователь угольных подовых блоков для алюминиевых электролизеров | 1980 |
|
SU885361A1 |
| Сменное грузозахватное приспособление к вилочному погрузчику | 1980 |
|
SU969660A1 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| Вилы погрузчика | 1986 |
|
SU1390181A1 |
| Сталкиватель груза вилочного погрузчика | 1982 |
|
SU1004254A1 |
| ВЕСЫ ВИЛОЧНОГО ПОГРУЗЧИКА | 2009 |
|
RU2495817C2 |
Вилочный погрузчик включает в себя систему (300) рычажных механизмов, которая содержит первый раскос (1), шарнирно соединенный с одного торца с роликом (1.4) в точке (1.1), которая может вертикально перемещаться внутри направляющей (6.1) установочной каретки/элемента (6), а с противоположного торца, при помощи вилочной каретки (5), в точке (1.3) поворота - с вилами (4). Второй раскос (2) шарнирно соединен с первым раскосом (1) в точке (1.2) поворота. Противоположный торец второго раскоса (2) шарнирно соединен с установочной кареткой/элементом (6) в точке (2.1) поворота. Точки поворота (1.1) и (2.1) расположены на или рядом с центральной линией направляющей (6.1). Угол наклона вил (4) и вилочной каретки (5) ограничен третьим раскосом (3), который шарнирно соединен с одного торца со вторым раскосом (2) в точке (3.2) поворота, а с противоположного торца шарнирно соединен с вилочной кареткой (5) в точке (3.1) поворота. Во время эксплуатации раскос (3) заставляет вилочную каретку (5) поворачиваться вокруг точки (1.3) поворота для компенсации постоянно меняющегося угла первого раскоса (1), поддерживая при этом, в целом, постоянный угол с направляющей (6.1), тем самым обеспечивая расположение вил (4), по существу, в горизонтальном положении в течение всего перемещения системы рычажных механизмов. Изобретение обеспечивает снижение себестоимости. 14 з.п. ф-лы, 41 ил.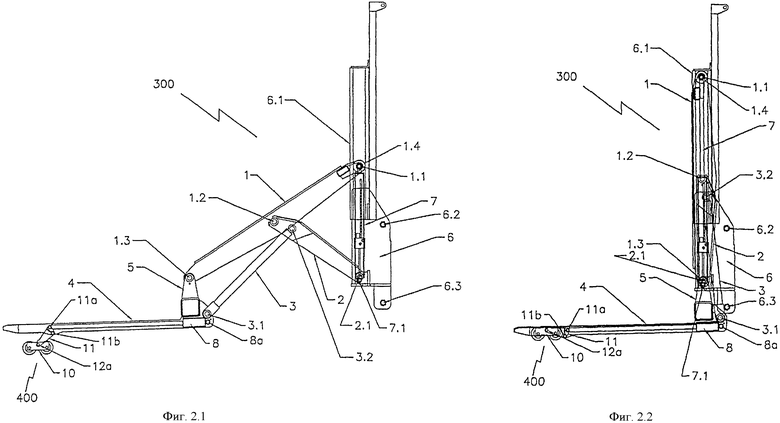
1. Вилочный погрузчик с рычажным механизмом, предназначенным для перемещения грузоподъемных средств, содержащий
подвижные средства, расположенные внутри направляющей,
первый раскос, шарнирно соединенный с подвижными средствами в первой точке поворота, а также с соединяющим рычажным элементом - во второй точке поворота;
второй раскос, шарнирно соединенный в третьей точке поворота с первым раскосом вблизи его средней точки, а также шарнирно соединенный в четвертой точке поворота, неподвижной относительно направляющей рядом с центральной линией упомянутого направляющей,
третий раскос, шарнирно соединенный со вторым раскосом в пятой точке поворота, а также с соединяющим рычажным элементом - в шестой точке поворота, с противоположного торца так, что траектория второй точки поворота, соединяющей первый раскос с соединительным рычажным элементом, перемещается, по существу, перпендикулярно направляющей, когда рычажный механизм перемещается между убранным и выдвинутым положениями, поддерживая в целом постоянный угол относительно направляющей, когда рычажный механизм перемещается между убранным и выдвинутым положениями,
привод, обеспечивающий перемещение рычажного механизма за счет приложения усилия к звеньям рычажного механизма,
отличающийся тем, что один конец привода шарнирно соединен с первым раскосом, а другой конец привода контактирует с неподвижным участком направляющей.
2. Вилочный погрузчик по п. 1, отличающийся тем, что другой конец привода шарнирно установлен на заданном участке второго раскоса.
3. Вилочный погрузчик по одному из пп. 1 или 2, отличающийся тем, что третий раскос выполнен в виде гидроцилиндра или электроподъемника, обеспечивающего независимый наклон рычажного механизма.
4. Вилочный погрузчик по одному из пп. 1 или 2, отличающийся тем, что установочный элемент расположен на неподвижном относительно направляющей участке так, что точка поворота, соединяющая первый раскос с подвижными средствами, а также точка поворота, соединяющая второй раскос с установочным элементом, находится на центральной линии направляющей.
5. Вилочный погрузчик по п. 4, отличающийся тем, что расстояния между точками поворота на первом раскосе, по существу, одинаковы, то есть расстояние между точкой поворота, соединяющей подвижные средства с первым раскосом, и точкой поворота, соединяющей второй раскос с первым раскосом, по существу, равно расстоянию между точкой поворота, соединяющей второй раскос с первым раскосом, и точкой поворота, соединяющей соединительный рычажный элемент с первым раскосом.
6. Вилочный погрузчик по одному из пп. 1 или 2, отличающийся тем, что расстояние между точкой поворота, соединяющей второй раскос с первым раскосом, и точкой поворота, соединяющей второй раскос с установочным элементом, по существу равно любому из следующих расстояний: расстоянию между точкой поворота, соединяющей подвижные средства с первым раскосом, и точкой поворота, соединяющей второй раскос с первым раскосом, либо расстоянию между точкой поворота, соединяющей второй раскос с первым раскосом, и точкой поворота, соединяющей рычажный элемент с первым раскосом.
7. Вилочный погрузчик по одному из пп. 1 или 2, отличающийся тем, что содержит грузоподъемные средства, которые прикреплены к соединительному рычажному элементу рычажного механизма, причем соединительный рычажный элемент содержит, по меньшей мере, одно звено, с которым шарнирно соединены первый раскос и третий раскос.
8. Вилочный погрузчик по одному из пп. 1 или 2, отличающийся тем, что подвижные средства содержат звено, установленное с возможностью перемещения между первым и вторым положениями внутри направляющей, например, с возможностью скольжения или качения.
9. Вилочный погрузчик по одному из пп. 1 или 2, отличающийся тем, что направляющая прикреплена к вертикальному элементу, такому как вертикальная мачта вилочного погрузчика, с возможностью демонтажа.
10. Вилочный погрузчик по одному из пп. 1 или 2, отличающийся тем, что выполнен с возможностью установки на транспортном средстве, а грузоподъемные средства содержат вилочную каретку и вилы, которые прикреплены к соединительному рычажному элементу рычажного механизма.
11. Вилочный погрузчик по одному из пп. 1 или 2, отличающийся тем, что рычажный механизм выполнен с возможностью регулировки угла между грузоподъемными средствами и вертикальной мачтой вилочного погрузчика, в которой находится направляющая для рычажного механизма, по мере того, как грузоподъемные средства перемещаются между убранным и выдвинутым положениями, за счет чего рычажный механизм полностью убирается внутрь направляющей, тем самым уменьшая количество выступающих звеньев.
12. Вилочный погрузчик по одному из пп. 1 или 2, отличающийся тем, что любое звено рычажного механизма имеет регулируемую длину с любого торца для компенсации производственных допусков или для регулировки наклона грузоподъемных средств.
13. Вилочный погрузчик по одному из пп. 1 или 2, отличающийся тем, что содержит колесный механизм стабилизации, расположенный на или рядом с передним торцом вил вилочного погрузчика и содержащий колесный узел, подвижно соединенный с поворотным узлом.
14. Вилочный погрузчик по п. 13, отличающийся тем, что колесный узел содержит,
по меньшей мере, одно колесо, установленное таким образом, чтобы ось вращения колеса проходила параллельно оси вращения шарнирного узла, за счет чего во время эксплуатации привод, например гидроцилиндр, выдвигается, заставляя поворотный узел вращаться вокруг точки поворота, в свою очередь, заставляя колесный узел опускаться вниз на несущую поверхность таким образом, чтобы колесный узел поворачивался или катился по несущей поверхности, при этом колесный узел содержит привод, непосредственно соединенный с поворотным узлом,
колесный механизм стабилизации, содержащий дополнительные тяги или рычаги для соединения с гидроцилиндрами или приводами, по меньшей мере, одно колесо, установленное таким образом, чтобы ось вращения колеса проходила параллельно оси вращения шарнирного узла, а также, по меньшей мере, одно колесо, установленное таким образом, чтобы ось вращения колеса проходила перпендикулярно первому колесу и оси вращения шарнирного узла, а
колесный механизм стабилизации расположен на вилах таким образом, чтобы он обеспечивал боковое смещение вил, когда вилы перемещают груз.
15. Вилочный погрузчик по одному из пп. 1 или 2, отличающийся тем, что содержит встроенную систему бокового смещения вил.
| GB 1407286 A, 24.09.1975; | |||
| ИЗМЕРЕНИЕ СХОДИМОСТИ АДАПТИВНЫХ ФИЛЬТРОВ | 1996 |
|
RU2180984C2 |
| US 3528579 A,09.1970 | |||
| US 3082894 A, 26 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| NL 8300147 A, 01.08.1984; | |||
| Погрузчик | 1973 |
|
SU536123A2 |
| Захват для круглых лесоматериалов | 1977 |
|
SU631440A1 |

