Область техники
Манипуляционное контрольное устройство согласно настоящему изобретению предназначено для контроля остановленного реактора атомной электростанции с реактором с водой под давлением, например, ВВЭР-440, ВВЭР-1000, МИР.1200, АР1000, а также для проведения испытаний, измерений, осмотров и ремонтов внутри открытого сверху корпуса реактора. Манипуляционное контрольное устройство в ходе таких операций временно размещено на корпусе реактора и после завершения работ с корпуса реактора снимается.
Уровень техники
До сих пор применяемые манипуляционные контрольные устройства, предназначенные для проведения испытаний, измерений, осмотров и ремонтов внутри открытого сверху корпуса реактора, располагаемые в реакторном зале, состоят из моста, рамы или суппорта, которые несут неподвижную или телескопическую стойку. Если стойка неподвижная, то по ней передвигается суппорт с несущей частью для закрепления головок, предназначенных для испытаний, измерений, осмотров и ремонтов. У телескопической стойки на нижнем конце закреплены телескопические кронштейны, а на них несущие части для испытаний, измерений, осмотров и ремонтов. В зависимости от выбранной концепции такие решения могут быть технологически сложными, требующими больших затрат времени на монтаж, могут быть связаны с необходимостью предоставления достаточного места для монтажа, проведение работ может занимать длительное время или выбранная концепция может привести к значительному увеличению веса манипуляционное контрольного устройства.
Примером актуального состояния техники в области манипуляционных контрольных устройств является патентная заявка № CZ274603, согласно которому манипуляционное контрольное устройство состоит из моста манипулятора, неподвижной стойки, суппорта, передвигающегося по неподвижной стойке с помощью подъемного устройства, образованного двумя канатными барабанами и несущей частью, закрепленной на суппорте и предназначенной для закрепления приборов, необходимых для измерений, испытаний, осмотров и ремонтов. Недостатком такого решения является высокий вес манипуляционного контрольного устройства и объем транспортируемого материала при перевозке манипуляционного контрольного устройства на конкретное место на реакторе, предназначенное для проведения контроля.
Еще одним примером состояния техники является патентная заявка №GB 1390 998, согласно которому манипуляционное контрольное устройство состоит из стойки, вспомогательных кронштейнов, нескольких поперечных суппортов для контроля патрубков и кольцевого сварного шва корпуса реактора. Механизм регулировки кронштейнов в стойке позволяет на определенных местах осуществлять монтаж на корпус реактора различного диаметра. Недостатком такого исполнения является то, что устройство предназначено лишь для определенных типов корпуса реактора и не пригодно для контроля днища корпуса реактора, так как до днища корпуса реактора устройство не достает.
Сущность изобретения
Манипуляционное контрольное устройство согласно настоящему изобретению разработано как легко монтируемое и демонтируемое позиционируемое устройство для манипуляции с отдельными модулями, предназначенными для проведения соответствующих контрольных операций в ходе осмотров корпуса реактора. Контрольные операции выполняются внутри корпуса реактора, причем речь идет о т.н. неразрушающих испытаниях, выполняемых по внутренней поверхности корпуса реактора без необходимости приложения существенных силовых воздействий.
Преимуществом манипуляционного контрольного устройства согласно настоящему изобретению является то, что речь идет о быстро и просто монтируемом и легко управляемом устройстве, которое, кроме того, спроектировано с учетом условий, имеющихся в реакторном здании, например, с учетом размера проходов или высоты подъема крана.
Простота и доступность конструкции, подходящий выбор материалов у манипуляционного контрольного устройства согласно настоящему изобретению позволяют легко проводить деконтаминацию после завершения контроля корпуса реактора, упрощает транспортировку на место проведения контроля (например, возможна перевозка на стандартном грузовом автомобиле).
Манипуляционное контрольное устройство спроектировано для стандартных условий реакторного зала, имеющихся в ходе остановки реактора. Манипуляционное контрольное устройство оснащено собственным пультом управления с собственным вычислительным оборудованием, расположенным в отдельном мобильном узле, поэтому не зависит от среды, в которой выполняется контроль.
Манипуляционное контрольное устройство согласно настоящему изобретению состоит из портала и к нему прикрепленной стойки, причем портал разработан для неоднократного соединения с корпусом реактора, в центре портала находится поворотная выдвижная стойка, проходящая через портал, причем портал снабжен поворотным устройством, поворотное устройство по периметру отверстия для стойки снабжено фланцем для разборного соединения с выдвижной стойкой, а также снабжено приводом, предназначенным для вращения выдвижной стойки, соединенной с поворотным устройством, в то время как выдвижная стойка снабжена соединительным элементом для соединения с фланцем портала, а на нижнем конце снабжена поперечным путем хотя бы с одной кареткой, предназначенной для закрепления зондов и распределительной коробкой для кабельной проводки к зондам, причем поперечный путь хотя бы с одной кареткой предназначен для перемещения каретки в радиальном направлении по отношению к центру портала с выдвижной стойкой. Таким образом, обеспечивается перемещение каретки с испытательными зондами в цилиндрических координатах по всему пространству корпуса реактора. В предпочтительном исполнении поперечный путь снабжен двумя каретками.
В предпочтительном исполнении манипуляционного контрольного устройства портал, стойка и поперечный путь изготовлены методом сварки из перфорированного листового металла, для уменьшения веса конструкции.
Манипуляционное контрольное устройство в предпочтительном исполнении снабжено тягами и подвеской, которые позволяют простое обращение с манипулятором в сборе и со стойкой манипулятора перед сборкой.
Манипуляционное контрольное устройство спроектировано так, что его часть, которая в ходе проведения контроля реактора находится ниже уровня главного разъема корпуса реактора, т.е. выдвижная стойка с поперечным путем, распределительной коробкой и кабельной проводкой, выполнена в исполнении, пригодном для работы в воде. Часть манипуляционного контрольного устройства, которая в ходе осмотра корпуса реактора остается над уровнем главного разъема, выполнена в исполнении, пригодном для деконтаминации вытиранием, т.е. не должна удовлетворять требованиям, предъявляемым к оборудованию, работающему в воде.
Преимущества манипуляционного контрольного устройства согласно настоящему изобретению следующие:
- Манипуляционное контрольное устройство разработано в качестве модульной контрольной системы для контроля различных корпусов реактора, с возможностью подключения контрольных зондов и инструмента, необходимо для проведения осмотра.
- Манипуляционное контрольное устройство позволяет простой демонтаж и монтаж на отдельные узлы, т.е. центр портала, консоль, выдвижная стойка, поперечный путь и тяги. Поэтому возможна транспортировка узлов по отдельности, в специальных контейнерах, обеспечивающих защиту в ходе транспортировки.
- Соединение указанных главных узлов манипуляционного контрольного устройства в ходе монтажа, осуществляемого в реакторном зале, представляет лишь механические работы, т.е. проводится быстро.
- Для проведения монтажа портальный кран реакторного зала используется лишь в минимальной мере, лишь для монтажа стойки в портал. Это позволяет сократить общую продолжительность монтажа манипуляционного контрольного устройства.
- Манипуляционное контрольное устройство оснащено собственным пультом управления с вычислительным оборудованием, расположенным в отдельном мобильном узле, таким образом, не зависит от среды, в которой проводится контроль.
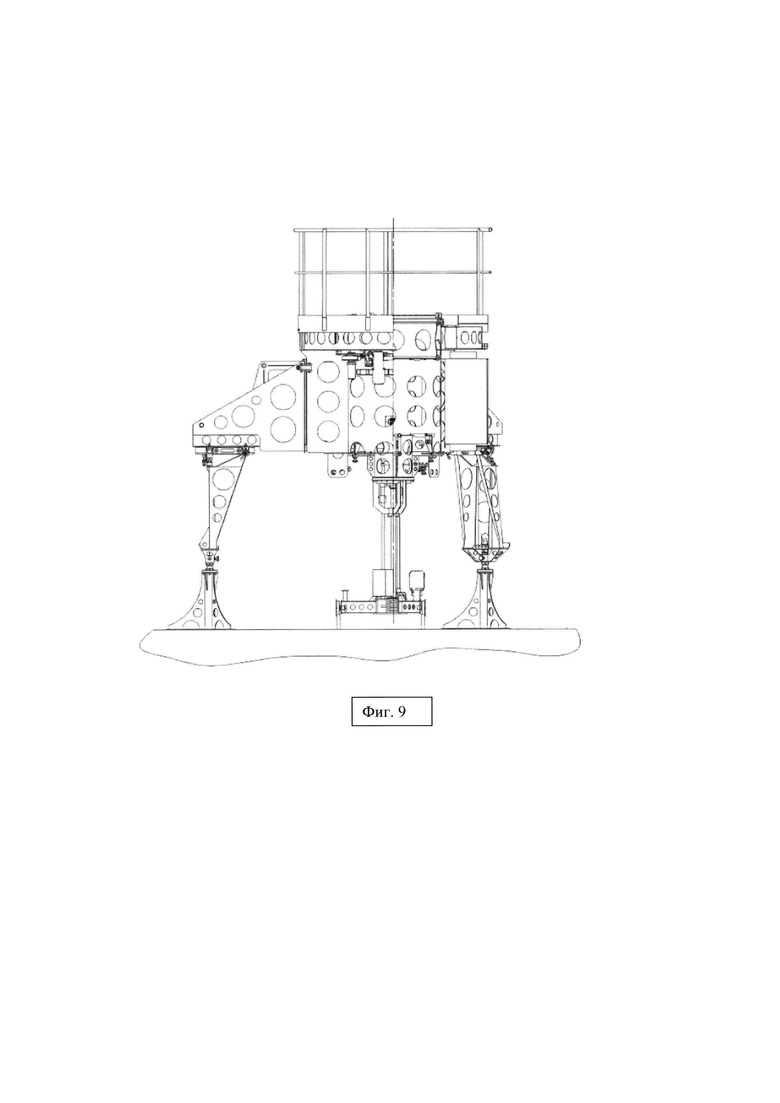
- В состав манипуляционного контрольного устройства в предпочтительном исполнении входят и транспортные приспособления, которые одновременно используются для монтажа всего устройства, в частности, для транспортировки портала по реакторному залу. Приспособления спроектированы с акцентом на простоту обслуживания и безаварийную работу, что показано, например, на фиг. 9 и 10.
- В ином предпочтительном исполнении манипуляционного контрольного устройства согласно настоящему изобретению обеспечивается простое управление и контроль положения зондов в реакторе, так как каждый привод в предпочтительном исполнении снабжен датчиком угла поворота для определения моментального положения при повороте и перемещении его отдельных частей.
- В предпочтительном исполнении манипуляционного контрольного устройства согласно настоящему изобретению обеспечивается простое обслуживание манипуляционного контрольного устройства, так как приводы и элементы управления можно легко механически демонтировать и контролировать и ремонтировать вне устройства, т.е. вне реакторного зала.
- Преимуществом является то, что в предпочтительном исполнении манипуляционного контрольного устройства согласно настоящему изобретению снижен вес конструкции благодаря отверстиям в материале балок выдвижной стойки треугольной формы и отдельных частей портала, причем отверстия, снижающие вес конструкции, выполнены на участках, не подвергаемых нагрузкам. Благодаря облегченной конструкции упрощается манипуляция, монтаж и транспорт манипуляционного контрольного устройства согласно настоящему изобретению.
- Материалы, из которых манипуляционное контрольное устройство изготовлено, пригодны для контакта с водой первого контура, в особенности материалы нижней части стойки с распределительной коробкой и поперечного пути с каретами. Всю механическую конструкцию можно деконтаминировать путем промывки деконтаминационными растворами.
- В предпочтительном исполнении устройство согласно настоящему изобретению позволяет контролировать различные диаметры корпуса реактора, благодаря несущим кронштейнам с регулируемой посадкой, что позволяет закрепление портала манипуляционного контрольного устройства на корпуса реакторов различного диаметра. Устройство согласно настоящему изобретению также позволяет применение различных испытательных зондов и камер путем закрепления на каретках, которые в предпочтительном исполнении могут перемещаться независимо друг от друга.
- Вопрос безопасности устройства в предпочтительном исполнении манипуляционного контрольного устройства решен так, что каждая каретка на поперечном пути приводится в движение независимо, собственным приводом. В аварийной ситуации, например, в ситуации отказ привода или прекращения подачи электроэнергии, с помощью разъединяющего устройства, которым оснащен привод, его можно отсоединить от каретки и задвинуть каретку вручную, что позволяет извлечь выдвижную стойку из корпуса реактора.
- Проведение контроля с помощью манипуляционного контрольного устройства согласно настоящему изобретению возможно в полностью автоматическом режиме, в котором устройство может перемещаться, и вести автоматический контроль согласно заранее заданным задачам, причем записи видеонаблюдения и данных измерений автоматически сохраняются.
- Преимуществом является то, что устройство согласно настоящему изобретению позволяет проведение контроля как минимум двумя головками с зондами одновременно благодаря наличию двух автономных кареток на поперечном пути. В корпусе реактора можно выполнять контроль одновременно в двух местах, причем каретки пригодны для подключения различных испытательных зондов, камер и т.д.
- Благодаря наличию двух автономных кареток можно установить и подготовить к испытаниям несколько головок с испытательными зондами одновременно, в исполнении с двумя автономными каретками можно применить три головки с испытательными зондами и камерой одновременно. Таким образом, возможно проведение нескольких контролей одновременно, без необходимости манипуляционное контрольное устройство согласно настоящему изобретению останавливать и проводить замену зондов, что приводит к сокращению общей продолжительности контроля по внутренней поверхности корпуса реактора.
- Еще одним преимуществом манипуляционного контрольного устройства согласно настоящему изобретению является то, что поворачивается лишь телескопическая стойка с каретками, что позволяет увеличить скорость вращения и сократить продолжительность контроля корпуса реактора, также благодаря вышеописанной облегченной конструкции устройства согласно настоящему изобретению.
Перечень чертежей
Примерное исполнение главных компонентов технического решения описано со ссылкой на чертежи, на которых данное исполнение изображено.
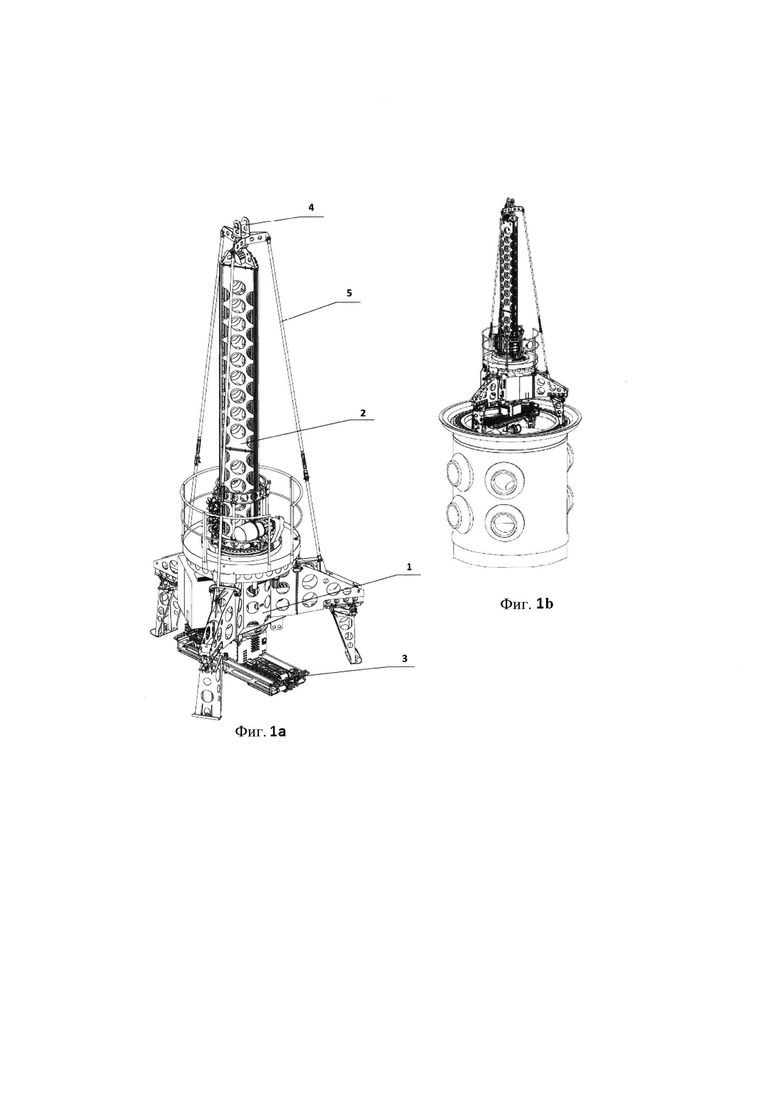
Фиг. 1a - общая компоновка манипуляционного контрольного устройства в предпочтительном исполнении,
Фиг. 1b - общая компоновка манипуляционного контрольного устройства, изображенного на фиг. 1a, установленного на корпусе реактора,
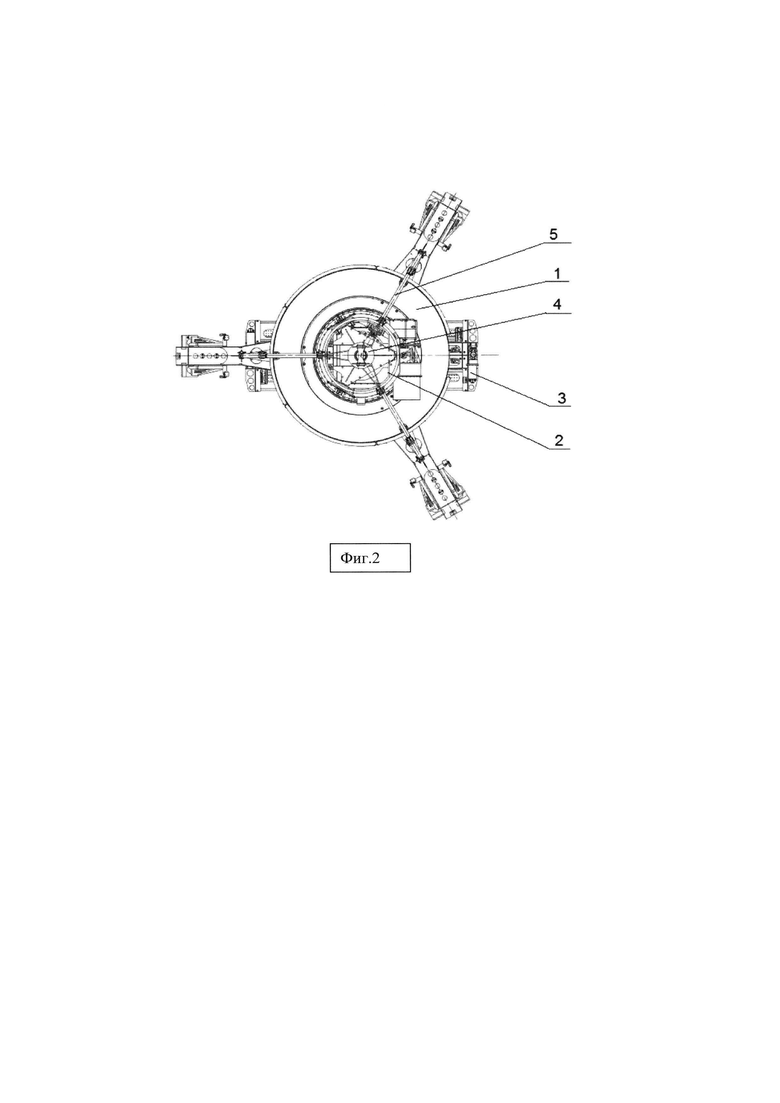
Фиг. 2 - вид сверху манипуляционного контрольного устройства, изображенного на фиг. 1a,
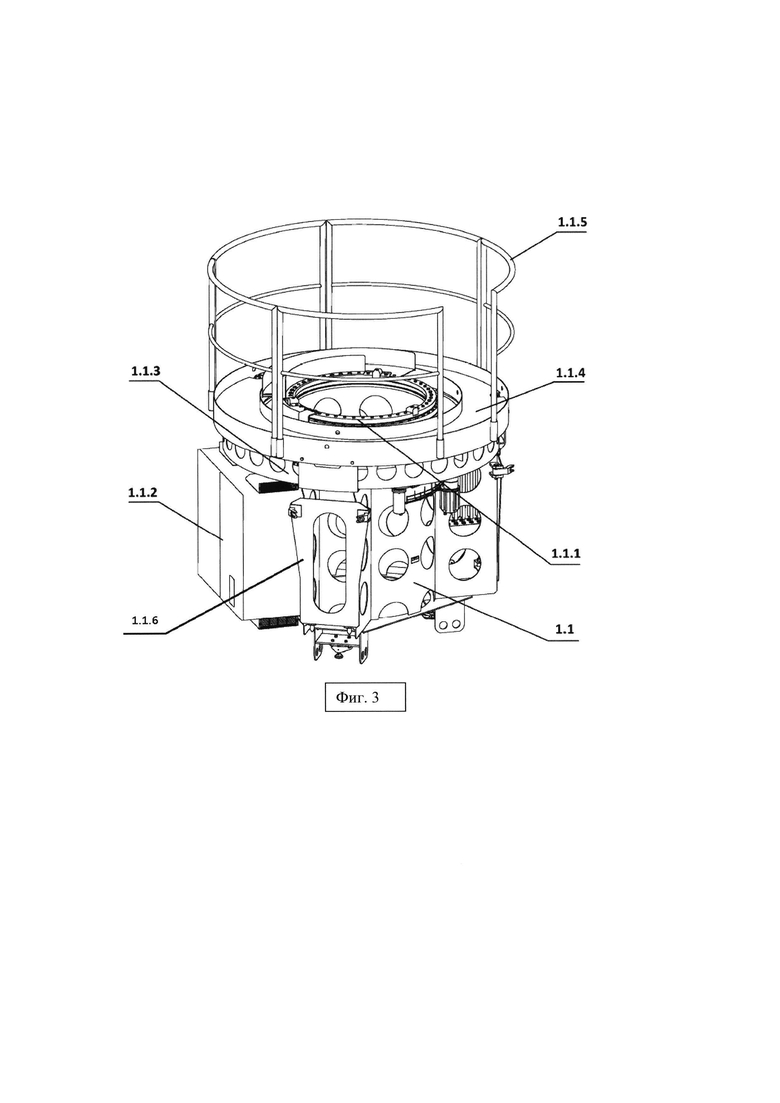
Фиг. 3 - вид центральной части портала манипуляционного контрольного устройства, изображенного на фиг. 1a,
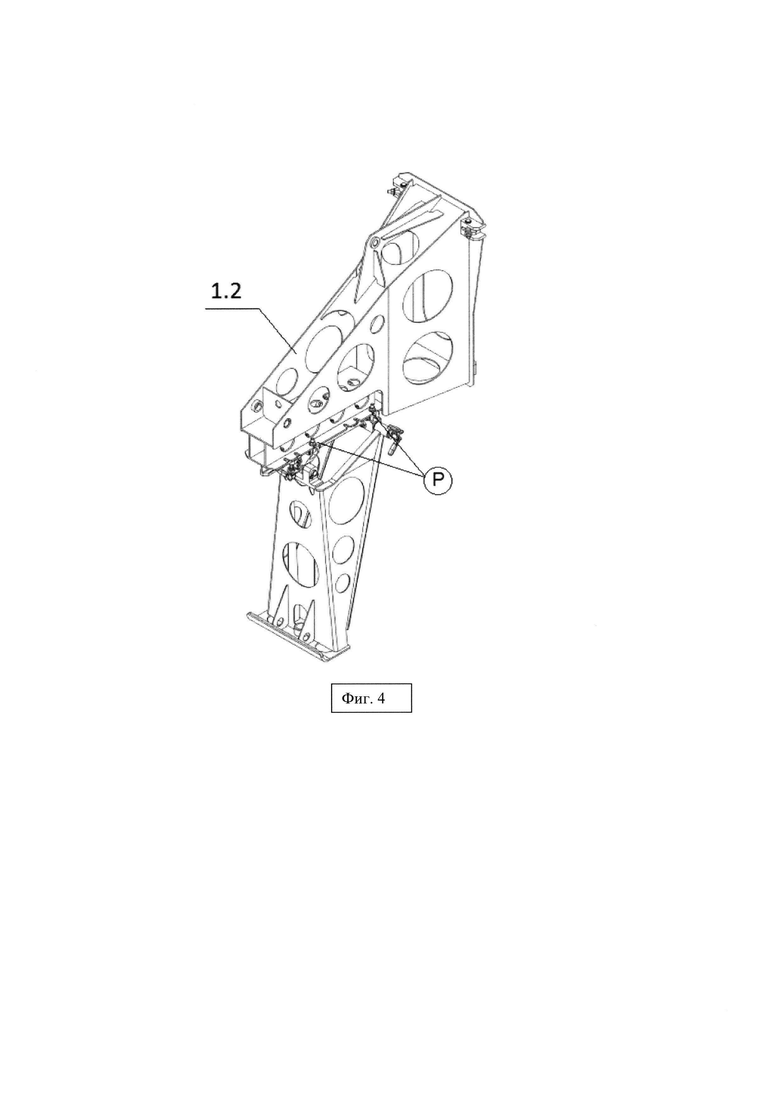
Фиг. 4 - несущий кронштейн манипуляционного контрольного устройства, изображенного на фиг. 1a,
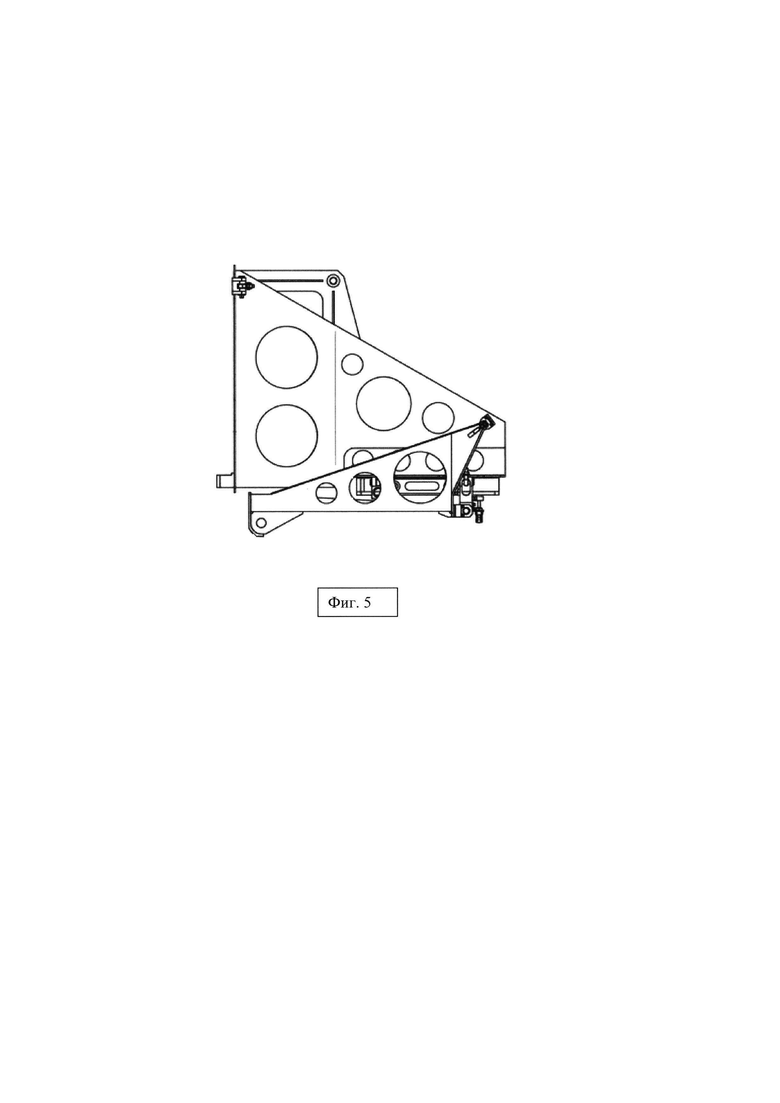
Фиг. 5 - несущий кронштейн, изображенный на фиг. 4, в транспортном положении,
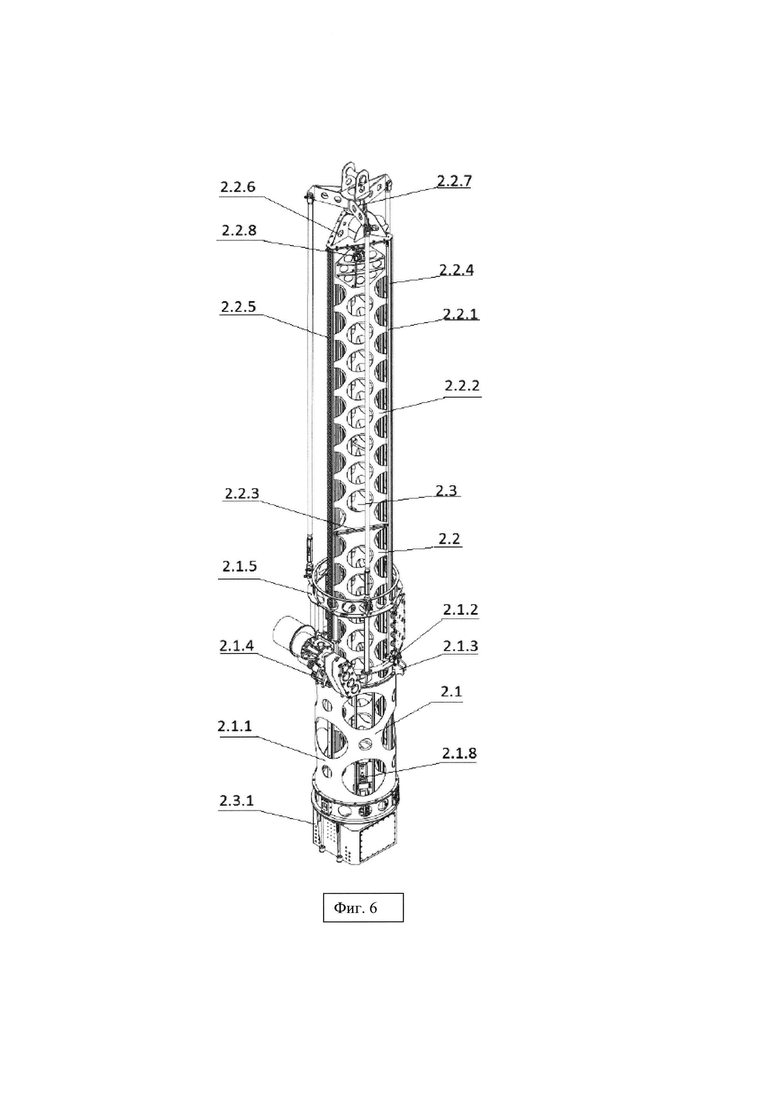
Фиг. 6 - стойка манипуляционного контрольного устройства, показанного на фиг. 1a.
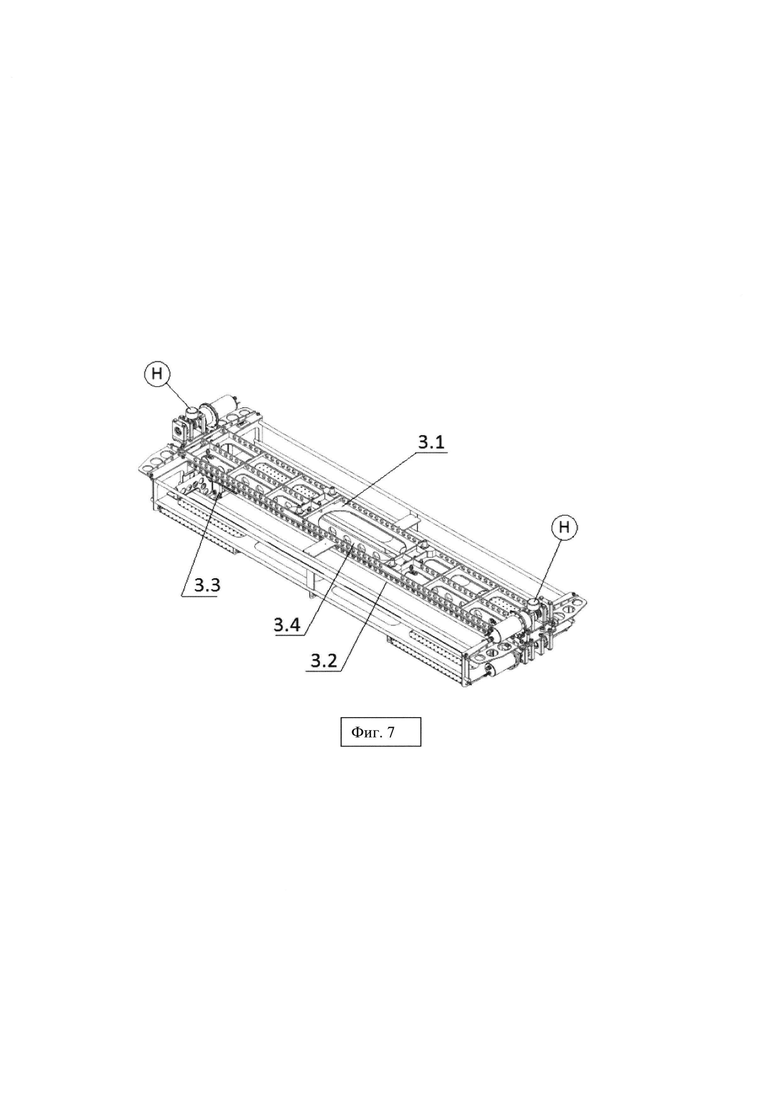
Фиг. 7 - поперечный путь манипуляционного контрольного устройства, показанного на фиг. 1a,
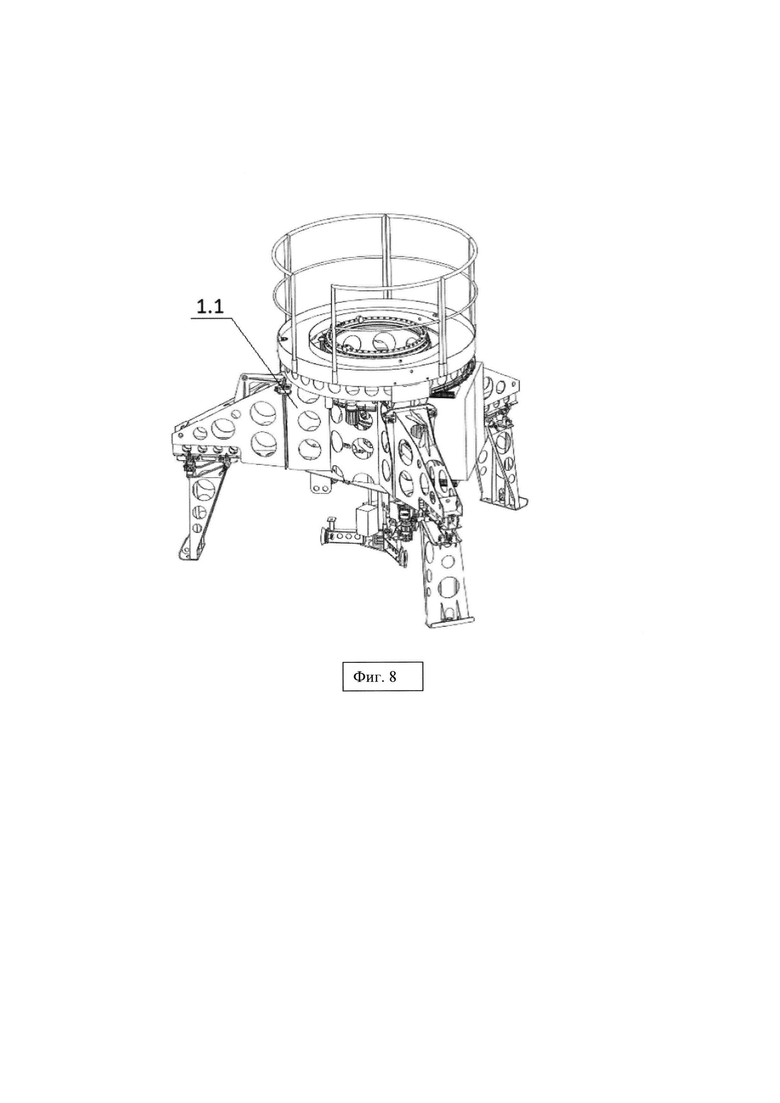
Фиг. 8 - вид в перспективе - собранный портал манипуляционного контрольного устройства, показанного на фиг. 1a, содержащий центральную часть с фиг. 3 и три несущих кронштейна, показанных на фиг. 4, причем портал расположен на подъемном манипуляторе, показанном на фиг. 10,
Фиг. 9 - вид сбоку собранного портала, показанного на фиг. 8, расположенного на подъемном манипуляторе, показанном на фиг. 10 и подготовленном к монтажу стойки и поперечного пути,
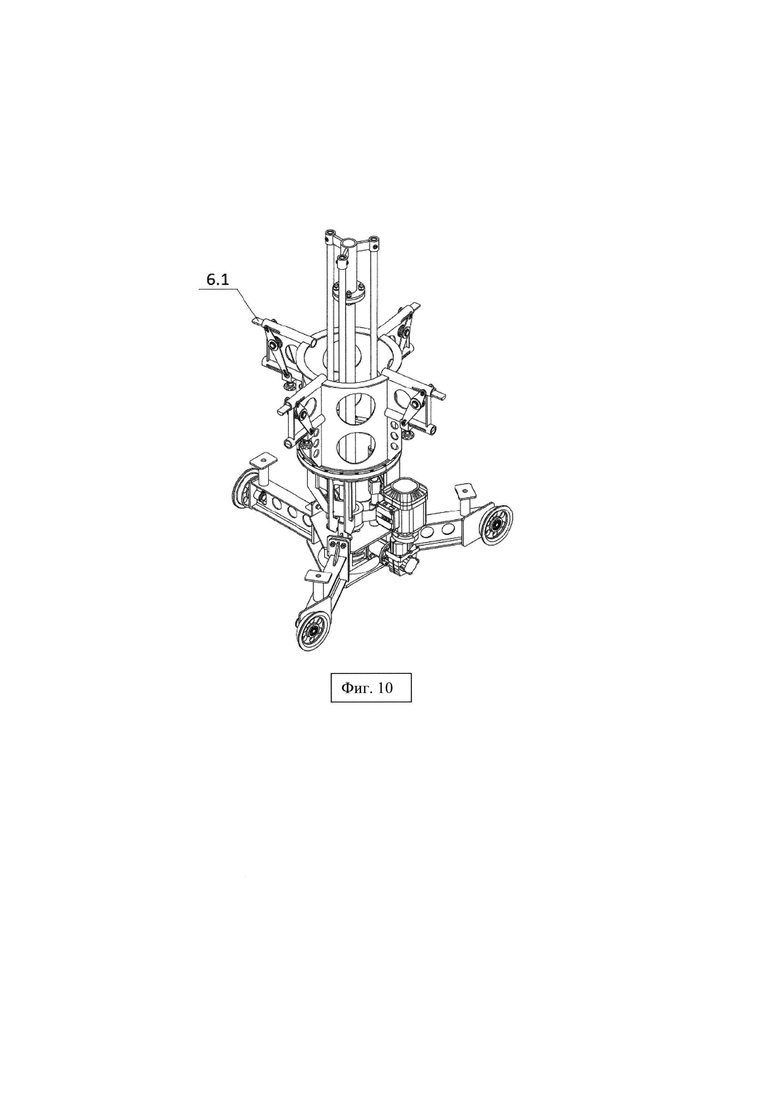
Фиг. 10 - подъемный манипулятор портала.
Примеры исполнения
Для понимания сути изобретения на фиг. 1a и 2 показан один из возможных примеров исполнения манипуляционного контрольного устройства согласно настоящему изобретению. Манипуляционное контрольное устройство, показанное на фиг. 1a и 2, состоит из портала 1, выдвижной стойки 2, поперечного пути 3, подвески 4 и тяг 5. В предпочтительном исполнении в состав манипуляционного контрольного устройства согласно настоящему изобретению входит и автономный манипулятор 6, позволяющий, в частности, быструю и удобную сборку портала 1 и его последующее соединение с выдвижной стойкой 2 и поперечным путем 3. На фиг. 1b изображен манипулятор, показанный на фиг. 1a, установленный на корпусе реактора.
Портал 1
Портал 1 предназначен для закрепления на фланце открытого корпуса реактора, см. фиг. 1a, и состоит из центральной части 1.1, образующей направляющую для выдвижной стойки 2, подробно показанной на фиг. 3, и тремя несущими кронштейнами 1.2, подробно показанными на фиг. 4, обеспечивающими установку манипуляционного контрольного устройства на корпусе реактора. Центральная часть 1.1 портала 1 снабжена поворотным устройством 1.1.1 с отверстием для выдвижной стойки 2, которое предназначено для соединения с выдвижной стойкой и для возможности поворота выдвижной стойки 2 по отношению к неподвижным частям портала 1. Центральная часть 1.1 в настоящем примерном исполнении представляет собой сварную конструкцию цилиндрической формы из нержавеющей аустенитной стали, снабженную главным фланцем на верхнем конце для соединения с поворотным устройством 1.1.1, которое будет описано ниже, и стаканов подшипников на нижнем конце, в предпочтительном исполнении в количестве трех штук, предназначенных для того, чтобы на них опиралась нижняя часть выдвижной стойки 2, которая будет описана ниже. Центральная часть 1.1 в настоящем предпочтительном исполнении по наружному периметру оснащена тремя насадками 1.1.6 с боковыми фланцами для присоединения трех несущих кронштейнов 1.2 к центральной части 1.1.
Портал 1 выгодно оснащен хотя бы одной распределительной коробкой 1.1.2 для электропроводки, вычислительного оборудования, приводного и измерительного блока поворота поворотного устройства с выдвижной стойкой 2, далее выгодно снабжен кольцевым лотком для кабельной цепи 1.1.3 и площадкой 1.1.4, используемой во время монтажа выдвижной стойки 2. Центральная часть 1.1 в данном примерном исполнении имеет две электрические распределительные коробки 1.1.2, установленные между насадками 1.1.6 с фланцами для закрепления несущих кронштейнов 1.2, одна распределительная коробка предназначена для приводов манипуляционного контрольного устройства, а вторая для измерений привода и положения поворотного устройства. Речь снова идет лишь о предпочтительном исполнении, количество распределительных коробок и их применение может изменяться в зависимости от конкретных потребностей и может отличаться от указанного примера.
Поворотное устройство 1.1.1 состоит из подшипника с поворотным опорным кольцом и закреплено на главном фланце центральной части 1.1. Поворотное устройство 1.1.1 служит для закрепления выдвижной стойки 2 и для обеспечения возможности поворота по отношению к порталу 1. Центральная часть 1.1 в настоящем предпочтительном примерном исполнении в верхней части снабжена вышеупомянутым кольцевым лотком 1.1.3 для кабельной цепи и площадкой 1.1.4, из нержавеющей аустенитной стали и ограждением 1.1.5, для снижения веса изготовленным из алюминия.
Как понятно из фиг. 4, каждый несущий кронштейн 1.2 в данном примерном исполнении состоит из неподвижной части и опрокидной части, которая предназначена для того, чтобы опиралась о фланец корпуса реактора в главном разъеме корпуса реактора. Несущие кронштейны 1.2 прикрепляются к боковым фланцам соответствующих наставок 1.1.6 центральной части 1.1 с помощью дополнительного фланца, который является составным элементом неподвижной части несущего кронштейна 1.2. Как неподвижная часть, так и опрокидная часть несущего кронштейна 1.2 представляют собой сварную конструкцию из нержавеющей аустенитной стали. Неподвижная часть каждого несущего кронштейна 1.2 в примере, показанном на фиг. 4, представляет собой балку, снабженную дополнительным фланцем, предназначенным для выполнения разборного соединения с соответствующим боковым фланцем центральной части 1.1, а сверху снабжена проушиной для закрепления соответствующей тяги 5 подвески 4, предназначенной для обращения с манипуляционным контрольным устройством в сборе. В примере исполнения на фиг. 3 боковой фланец насадки 1.1.6 снабжен защелками, обеспечивающими разборное соединение несущего кронштейна 1.2 с центральной частью 1.1, однако, возможно и иное соединение, не только разборное. Соединение несущих кронштейнов 1.2 с центральной частью 1.1 может быть согласно иному предпочтительному исполнению выполнено с помощью цапф и болтов или с помощью иного известного способа, обеспечивающего прочное соединение несущих кронштейнов 1.2 с центральной частью 1.1 портала 1, с возможностью простого демонтажа. Понятно, что соединение несущих кронштейнов 1.2 с центральной частью 1.1 возможно реализовать многими способами, при соблюдении требования по сохранению возможности отсоединить несущие кронштейны от центральной части перед транспортировкой и последующего закрепления в ходе монтажа портала, поэтому представленное на фигуре соединение следует воспринимать лишь как примерное и предпочтительное исполнение. Подвеска 4 и тяги 5 будут описаны ниже.
Несущий кронштейн 1.2 выгодно оснащен подвижным креплением опрокидной части по отношению к неподвижной части, что обеспечивает возможность крепления портала 1 манипуляционного контрольного устройства согласно настоящему изобретению на корпус реактора различного диаметра. Подвижная посадка опрокидной части на неподвижной части несущего кронштейна 1.2 в данном случае исполнения выполнена так, что неподвижная часть на нижней стороне снабжена подходящей направляющей, например, рельсом, по которому опрокидная часть перемещается и к которому после настройки требуемого диаметра корпуса реактора опрокидную часть можно зафиксировать.
Опрокидная часть кронштейна в данном примерном исполнении состоит из опрокидной ноги и башмака для упора об фланец корпуса реактора, причем обе данные части изготовлены из нержавеющей аустенитной стали. Подвижная посадка опрокидной части или опрокидной ноги на направляющей неподвижной части может быть предпочтительно выполнена с помощью четырех комбинированных блоков, с помощью которых опрокидная часть по неподвижной части перемещается, причем опрокидная нога соединена с неподвижной частью при помощи поворотного крепления, позволяющего опрокидывание. Поворотное крепление позволяет настройку опрокидной части в двух положениях, в транспортном положении, используемом и для сборки портала, в котором опрокидная часть опущена вниз неподвижной части, и рабочем положении, в котором опрокидная часть наклонена приблизительно на 90° в направлении вниз. Поворотное крепление предпочтительно изготовлено с двумя быстрозажимными пальцами, позволяющими зафиксировать опрокидную часть в обоих положениях. Транспортное положение опрокидной части несущего кронштейна показано на Фиг. 5.
На Фиг. 4 показано подвижная посадка опрокидной части на неподвижной части с возможностью регулировки положения опрокидной ноги с тремя различными шагами для трех различных типов корпуса реактора, причем закрепление опрокидной ноги в отдельных положениях выполнено с помощью быстрозажимного пальца, фиксация выбранного положения выполнена с помощью четырех болтов Р. Речь также идет лишь о предпочтительном исполнении, служащем для иллюстрации гибкости манипуляционного контрольного устройства согласно настоящему изобретению. Подвижное крепление является лишь предпочтительным, естественно, можно создать манипуляционные контрольные устройства лишь для соединения с корпусом реактора одного диаметра, точно также как для иного количества диаметров, чем применено в настоящем примерном исполнении.
Следующей частью манипуляционного контрольного устройства согласно настоящему изобретению, показанного на фиг. 1, является выдвижная стойка 2, предназначенная для несения поперечного пути 3, на котором размещены каретки для контрольных модулей. Как видно, выдвижная стойка 2 обеспечивает перемещение поперечного пути 3 с каретками по высоте корпуса реактора, а также его поворот в корпусе реактора, в то время как поперечный путь 3 обеспечивает перемещение кареток в радиальном направлении корпуса реактора. Примерное исполнение выдвижной стойки и поперечного пути будут описаны ниже.
Выдвижная стойка 2
Примерное исполнение самой выдвижной стойки 2, не закрепленной на портале 1, показано на фиг. 6. В данном примерном исполнении выдвижная стойка 2 содержит направляющую стойки 2.1, предназначенную для соединения с поворотным устройством портала 1.1.1 (см. фиг. 3), и непосредственно стойку, в данном исполнении телескопическую и состоящую хотя бы из двух частей, телескопически устроенных друг по отношению к другу, а именно из наружной стойки 2.2 и внутренней стойки 2.3. Наружная стойка 2.2 и внутренняя стойка 2.3 устроены телескопически, подвижно по отношению друг к другу. Как видно, это лишь предпочтительное исполнение, количество телескопически входящих друг в друга частей стойки, т.е. количество телескопических внутренних стоек соответствующего размера может быть в иных примерах исполнения манипуляционного контрольного устройства отличаться, т.е. может быть конструкция с тремя, четырьмя или более внутренними стойками.
Как наружная стойка 2.2, так и внутренняя стойка 2.3 в исполнении, показанном на фиг. 6, имеют особо предпочтительный треугольный профиль, причем на трех боковых гранях (вершинах) имеются три направляющих пути для направления обеих частей выдвижной стойки друг по другу. Направляющая наружной стойки 2.2 в направляющей стойки 2.1 и направляющая внутренней стойки 2.3 по отношению к наружной стойке 2.2 выполнены с помощью фасонных блоков, описание приведено ниже, благодаря чему обеспечена достаточная жесткость манипуляционного контрольного устройства согласно настоящему изобретению и при полном выдвижении обеих телескопических частей стойки. Примерное исполнение обеих телескопических частей стойки будет описано ниже.
В верхней части выдвижной стойки 2 наружная стойка 2.2 вместе с внутренней стойкой 2.3 расположены в направляющей стойки 2.1, которая создана для соединения с поворотным устройством 1.1.1 портала 1. Направляющая стойки 2.1 будет подробно описана ниже, направляющая стойки выгодно оснащена и приводным блоком для выдвижения выдвижной стойки 2 в корпус реактора и для извлечения из него. Непосредственное вставление и извлечение выдвижной стойки 2 выгодно выполнено с помощью хотя бы одной зубчатой рейки на хотя бы одном направляющем пути наружной стойки 2.2 и с помощью блоков с втулочно-роликовой цепью, расположенных между наружной стойкой 2.2 и внутренней стойкой 2.3. В нижней части выдвижной стойки 2, т.е. у поперечного пути 3, выгодно расположена распределительная коробка, к которой можно подключить кабели от приводов и датчиков отдельных кареток, при необходимости, и кабели зондов. В верхней части направляющей стойки 2.1 в данном примерном исполнении имеются проушины для тяг 5, которыми выдвижная стойка 2 соединена с подвеской 4, что позволяет удобное обращение с выдвижной стойкой 2 в ходе монтажа и демонтажа к порталу 1.
Направляющая стойки 2.1 в примерном исполнении, показанном на фиг. 6, образована цилиндрическим корпусом 2.1.1, представляющим собой сварную конструкцию из нержавеющей аустенитной стали, с фланцами на обоих концах. К верхнему фланцу присоединен венец 2.1.2 направляющей, в котором расположены опоры, предназначенные для установки выдвижной стойки 2 на поворотное устройство 1.1.1 портала 1, показанное на фиг. 3. В опорах расположены фасонные блоки 2.1.3 и шестерня 2.1.4. Шестерня расположена в буксах и обеспечивает перемещение зубчатой рейки выдвижной стойки. Над венцом 2.1.2 направляющей с помощью трех распорок закреплен венец 2.1.5, также представляющий собой сварную конструкцию из нержавеющей аустенитной стали, на которой расположены проушины для присоединения тяг 5, что позволяет удобное обращение с выдвижной стойкой 2 в ходе ее закрепления к порталу. Между венцом 2.1.2 направляющей и верхним венцом закреплен привод стойки. Нижний фланец кожуха 2.1.1. направляющей стойки соединен с нижним венцом, который также представляет собой сварную конструкцию из нержавеющей аустенитной стали. В нижней части образует круговой опорный путь и несет два фасонных и один зубчатый блок. Фасонный блок, шестерня и гребневой блок, расположенные на венце направляющей и на нижнем венце, предназначены для ведения наружной стойки в портале.
Наружная стойка 2.2, показанная на фиг. 6, сварена из трех балок 2.2.1 прямоугольного сечения, соединенных пластинами 2.2.2 в треугольник (в поперечном сечении наружной стойки). Однако возможно применение и иного профиля балок, приведенный в данном случае прямоугольный профиль представляет собой лишь предпочтительное исполнение, наружная стойка может иметь иную форму сечения. На фиг. 6 наружная стойка 2.2 по технологическим соображениям предпочтительно изготовлена из двух деталей одинаковой длины, снабженных фланцами 2.2.3 и соединенных друг к другу болтами. Нижняя деталь наружной стойки 2.2 имеет в балках 2.2.1 вваренные буксы для установки фасонных блоков направляющей наружной части стойки. На наружных продольных гранях наружной стойки 2.2 закреплены, например, привинчиванием, три фасонных направляющих пути. Два фасонных пути в данном примерном исполнении представляют собой направляющую с пазом 2.2.4, а одна направляющую с реечным зубчатым зацеплением 2.2.5, обеспечивающим выдвижение наружной стойки 2.2 (вместе с наружной стойкой 2.3) из направляющей стойки 2.1. В верхней части выдвижной стойки 2 закреплен держатель стойки 2.2.6, который представляет собой сварную конструкцию из нержавеющей аустенитной стали, снабженную направляющей кабельной цепи и цапфой 2.2.7, служащей для наводки подвески 4. В верхней и нижней части выдвижной стойки закреплены крепления 2.2.8 цепных колес для перемещения внутренней части стойки. Материалом всех компонентов является нержавеющая аустенитная и мартенситная сталь.
Внутренняя стойка 2.3, показанная на фиг. 6, подобным образом как наружная стойка 2.2 сварена из трех балок, соединенных пластинами в треугольный профиль. По технологическим причинам наружная часть стойки разделена на две части одинаковой длины, соединенных болтами через фланцы, однако на фиг. 6 это не видно. Исполнение внутренней стойки 2.3 позволяет ее полное вставление в наружную стойку 2.2. На наружной стороне балок закреплены винтами фасонные направляющие. На нижнем конце стойки расположен фланец для закрепления распределительной коробки 2.3.1, на наружной стороне закреплен держатель кабельной цепи. Все компоненты стойки изготовлены из нержавеющей аустенитной и мартенситной стали.
Поперечный путь 3
Поперечный путь 3, показанный на фиг. 7, обеспечивает перемещение контрольных модулей в радиальном направлении по отношению к корпусу реактора. Для данной цели в настоящем примерном исполнении поперечный путь оснащен двумя независимыми путями с каретками. Основой поперечного пути 3 является рама 3.1, в предпочтительном исполнении выполненная в виде сварной конструкции подходящей формы. Рама в верхней части имеет крепления для соединительных цапф для присоединения выдвижной стойки 2. На нижней части рамы 3.1 закреплены две независимые пути 3.2 с каретками 3.3. Пути 3.2 с каретками 3.3 выполнены, например, из двух рельсов, закрепленных на центральном поясе 3.4, закрепленном на раме 3.1, на которых расположены две каретки с направляющими роликами, подключенными к соответствующими приводам, которые управляются и питаются кабелями из распределительной коробки. Каретки в нижней части снабжены фланцами, предназначенными для закрепления рабочих модулей. Каретки приводятся в движение (независимо друг от друга) с помощью втулочно-роликовых цепей двумя комплектами привода пути, которые закреплены на раме в области концов рельсов путей. Комплект приводов в предпочтительном исполнении состоит из двух частей - плиты крепления привода и плитой крепления колес.
Подвеска 4
Манипуляционное контрольное устройство согласно настоящему изобретению в предпочтительном исполнении снабжено подвеской 4, предназначенной для переноски всего манипуляционного контрольного устройства или альтернативно в ходе монтажа манипуляционного контрольного устройства для манипуляции с выдвижной стойкой 2 входе монтажа стойки к порталу 1. Подвеска 4 в предпочтительном исполнении представляет собой трехплечную траверсу с цапфой, приспособленной для удобного захвата крюком крана. На концах плеч расположены проушины для закрепления трех тяг 5, см. ниже. Центр траверсы в нижней части имеет посадочную траверсу для направления держателя стойки. Закрепление держателя стойки в подвеску и применение тяг 5 позволяет простое обращение в ходе монтажа и демонтажа стойки 2 на портал 1. Подвеска изготовлена из нержавеющей аустенитной и мартенситной стали. Тяги 5 манипуляционного контрольного устройства в предпочтительном исполнении изготовлены как три регулируемые по длине тяги, причем каждая тяга состоит из стоечной части и портальной части, которые соединяются между собой. При монтаже манипуляционного контрольного устройства и манипуляции с выдвижной стойкой соединяют подвеску 4 с данной выдвижной стойкой 2 лишь стоечные части тяг. При обращении с манипуляционным контрольным устройством в сборе подвеску 4 соединяют с несущими кронштейнами портала 1.2, как было уже описано, соединенные стоечные и портальные части тяг 5. Тяги изготовлены из нержавеющей аустенитной и мартенситной стали.
Подъемный манипулятор 6
Центральная часть 1.1 портала 1 для упрощения монтажа портала 1 предпочтительно оснащена собственным подъемным манипулятором 6, который представляет собой отдельное устройство, предназначенное непосредственно для соединения с центральной частью 1.1 и для обращения с порталом 1 манипуляционного контрольного устройства согласно настоящему изобретению. Подъемный манипулятор 6 снабжен выдвижной частью 6.1 с опорными поверхностями, которые спроектированы так, чтобы можно было безопасно обращаться с порталом. Подъемный манипулятор представляет собой автономное устройство, содержащее собственный двигатель с коробкой передач, соединенной с ходовым винтом, обеспечивающим ход выдвижной части 6.1. Выдвижная часть 6.1 для подъема портала выгодно оснащена направляющей, выполненной из трех полых штанг, закрепленных в шести буксах. Выдвижная часть благодаря размещению на поворотном аксиальном подшипнике может в ходе выдвижения поворачиваться вокруг вертикальной оси. Весь подъемный манипулятор 6 портала 1 перемещается на трех вращающихся колесах, что обеспечивает перемещение манипулятора в произвольном направлении.
На данном манипуляторе 6 портал 1 (без демонтированных несущих кронштейнов) с выгодой транспортируется и в контейнере. Манипулятор 6 одновременно предназначен для упрощения монтажа манипуляционного контрольного устройства после доставки на место проведения контроля. Манипулятор 6 позволяет поднимать и поворачивать центральную часть портала 1 наверх так, чтобы можно было присоединить к порталу несущие кронштейны 1.2, см. фиг. 8, а также позволяет и подъем портала 1 для монтажа стойки 2 и поперечного пути 3, см. фиг. 9.
Промышленная применимость
Практическое применение предлагаемого решения предполагается для проведения внутреннего контроля корпусов ядерных реакторов.
Список обозначений
1. Портал
1.1. Центральная часть портала
1.1.1. Поворотное устройство
1.1.2. Распределительная коробка
1.1.3. Круговой лоток кабельной цепи
1.1.4. Площадка
1.1.5. Ограждение
1.1.6. Насадка
1.2. Несущий кронштейн
2. Стойка
2.1. Направляющая стойки
2.1.1. Цилиндрическая сварная конструкция с фланцами
2.1.2. Венец направляющей
2.1.3. Фасонные блоки
2.1.4. Шестерня
2.1.5. Верхний венец
2.2. Наружная стойка
2.2.1. Балка
2.2.2. Пластина
2.2.3. Фланец
2.2.4. Направляющий путь
2.2.5. Направляющий путь с реечным зубчатым зацеплением
2.2.6. Держатель стойки
2.2.7. Цапфа
2.2.8. Опора цепных колес
2.3. Внутренняя стойка
3. Поперечный путь
4. Подвеска
5. Тяги
6. Подъемный манипулятор
6.1. Выдвижная часть
Изобретение относится к манипуляционным контрольным устройствам (МКУ) ядерного реактора. МКУ содержит портал для неоднократного соединения с корпусом реактора (1) с выдвижной стойкой (2). Портал (1) имеет центральную часть (1.1) и как минимум три присоединяемых к ней несущих кронштейна (1.2), расположенные равномерно по контуру центральной части (1.1) и разработанные для неоднократного соединения с корпусом реактора. Центральная часть (1.1) портала (1) снабжена поворотным устройством (1.1.1) с отверстием посередине и приводом для поворота выдвижной стойки (2), причем данное поворотное устройство (1.1.1) снабжено фланцем для неоднократного соединения с выдвижной стойкой (2), в то время как выдвижная стойка (2) содержит направляющую стойки (2.1), наружную стойку (2.2) и в ней расположенную телескопическую внутреннюю стойку (2.3), разработанные для взаимного перемещения друг в друге. Направляющая стойки (2.1) снабжена соединительным элементом для неоднократного соединения с фланцем портала (1), в то время как внутренняя стойка (2.3) на нижнем конце снабжена поперечным путем (3) с хотя бы одной кареткой, предназначенной для размещения зондов, и распределительной коробкой для кабельной проводки к зондам. Технический результат – повышение эффективности осмотра открытого корпуса реактора. 9 з.п. ф-лы, 11 ил.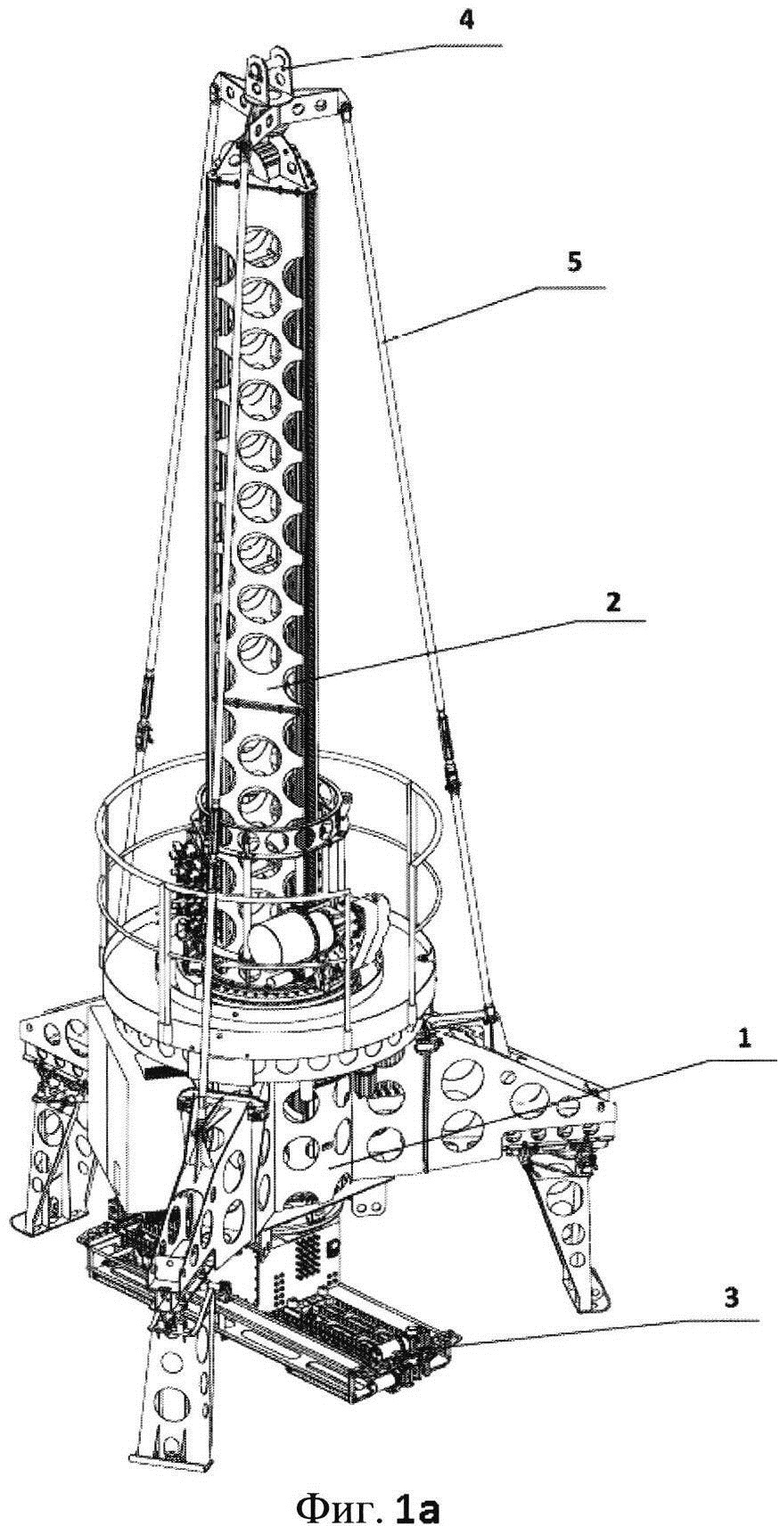
1. Манипуляционное контрольное устройство, содержащее портал (1), к которому присоединена выдвижная стойка (2), причем портал (1) разработан для неоднократного соединения с корпусом реактора, отличающееся тем, что портал (1) имеет центральную часть (1.1) и как минимум три присоединяемых к ней несущих кронштейна (1.2), расположенных равномерно по контуру центральной части (1.1) и разработанных для неоднократного соединения с корпусом реактора, причем центральная часть (1.1) портала (1) снабжена поворотным устройством (1.1.1) с отверстием посередине и приводом для поворота выдвижной стойки (2), причем данное поворотное устройство (1.1.1) снабжено фланцем для неоднократного соединения с выдвижной стойкой (2), в то время как выдвижная стойка (2) содержит направляющую стойки (2.1), наружную стойку (2.2) и в ней телескопически расположенную внутреннюю стойку (2.3), разработанные для взаимного перемещения друг в друге, причем направляющая стойки (2.1) снабжена соединительным элементом для неоднократного соединения с фланцем портала (1), в то время как внутренняя стойка (2.3) на нижнем конце снабжена поперечным путем (3) с хотя бы одной кареткой, предназначенной для размещения зондов, и распределительной коробкой для кабельной проводки к зондам, причем поперечный путь (3) хотя бы с одной кареткой предназначен для перемещения каретки в радиальном направлении от центра портала (1) с выдвижной стойкой (2).
2. Манипуляционное контрольное устройство согласно п. 1, отличающееся тем, что поперечный путь (3) снабжен двумя автономными каретками.
3. Манипуляционное контрольное устройство согласно п. 1, отличающееся тем, что как наружная стойка (2.2), так и внутренняя стойка (2.3) имеют треугольное сечение с тремя вершинами, проходящими по длине стойки, причем внутренняя стойка телескопически расположена в наружной стойке (2.3), а как наружная стойка (2.2), так и внутренняя стойка (2.3) по продольным граням снабжены тремя направляющими пазами, причем хотя бы один из них является ведущим для выдвижения из направляющей стойки (2.1) и по отношению друг к другу.
4. Манипуляционное контрольное устройство согласно п. 1, отличающееся тем, что центральная часть (1.1) портала (1) снабжена по меньшей мере тремя насадками (1.1.6) с боковыми фланцами, а несущий кронштейн (1.2) состоит из неподвижной части и опрокидной части, причем неподвижная часть представляет собой балку, снабженную дополнительным фланцем для соединения с боковым фланцем насадки (1.1.6).
5. Манипуляционное контрольное устройство согласно п. 4, отличающееся тем, что опрокидная часть подвижно расположена на неподвижной части для того, чтобы портал (1) можно было закрепить на корпус реактора различного диаметра.
6. Манипуляционное контрольное устройство согласно п. 4 или 5, отличающееся тем, что опрокидная часть несущего кронштейна (1.2) с неподвижной частью подвижно соединена, причем данное поворотное соединение предусмотрено для обеспечения фиксации опрокидной части в транспортном и рабочем положении.
7. Манипуляционное контрольное устройство согласно любому из пп. 1-5, отличающееся тем, что портал (1), выдвижная стойка (2), поперечный путь (3) и каретка изготовлены методом сварки из листового материала соответствующей толщины с отверстиями, выполненными с целью уменьшения веса конструкции.
8. Манипуляционное контрольное устройство согласно любому из пп. 1-5, отличающееся тем, что выдвижная стойка (2) на конце, соединенном с поперечным путем (3) с каретками, снабжена распределительной коробкой для подключения кабелей приводов кареток и датчиков и/или датчиков, размещенных на каретках, предназначенных для работы в воде.
9. Манипуляционное контрольное устройство согласно любому из пп. 1-5, отличающееся тем, что содержит подъемный манипулятор (6) портала (1).
10. Манипуляционное контрольное устройство согласно п. 8, отличающееся тем, что снабжено устройством управления с вычислительным устройством, подключенным к приводам выдвижной стойки и кареток и к датчикам и/или зондам на каретках.
| Манипулятор для неразрушающего контроля корпуса реактора | 1984 |
|
SU1263116A1 |

