Изобретение относится к птицеперерабатывающей промышленности и предназначено для использования в убойных цехах на птицеперерабатывающих предприятиях.
Известен способ подвешивания живой птицы на подвесные пути для обработки, включающий подачу птицы навалом, ручное и подвешивание на рамку подвесного конвейера, выбранного в качестве аналога [1. Горбатов В.М. и др. Справочник по оборудованию предприятий мясной промышленности. М.: Пищевая промышленность, 1965, с.200-263].
Наиболее близким аналогом является способ [А.С. №797635 (СССР). Устройство для подачи тушек птицы на подвесные пути. Д.М.Ангархаев, Г.М.Бербидаев - БИ №3, 1981], включающий ее поштучное передвижение ленточным транспортером к месту захвата и фиксирование птицы с момента захвата до момента подвешивания на рамку подвесного пути, выбранного в качестве аналога [2].
Технический результат, в котором достигается путем поштучной подачи птицы с помощью конвейера, фиксирования с момента захвата до момента подвешивания на рамку, выбранного за прототип [2].
Недостатком способов, выбранных за аналог [1] и прототип [2], является их низкая эффективность, связанная с ограниченными функциональными возможностями. В частности, не используются положительные факторы инстинктивного поведения птицы при перемещении и подачи на подвесной путь, а также возможности использования внешних формирующих воздействий на ее поведение. Низкая эффективность способов связана и с тем, что не обеспечиваются условия безопасной транспортировки. Птицу травмируют, начиная с момента подачи навалом на ленточный транспортер, далее в момент ее подхватывания механическим захватом с желоба на пластинчатом конвейере, затем при перемещении ее по полукругу возможны случаи зависания и защемления лапок (ног) механическими устройствами, рычажками, а при нарушении синхронизации установки привода рамками подвесного пути. Травматизм вызывает стресс у птицы и приводит к потере массы мяса, например (10÷15) г на один кг живого веса. Низкая эффективность связана с высокой трудоемкостью и понижением производительности труда обслуживающего персонала.
Техническим результатом является повышение эффективности способа подачи живой птицы на подвесные пути.
Технический результат достигается тем, что в способе подачи живой птицы на подвесные пути, включающем ее поштучное передвижение ленточным транспортером к месту захвата и фиксирование птицы с момента захвата до момента подвешивания на рамку подвесного пути, при передвижении птицы по ленточному транспортеру до места захвата на нее воздействуют внешними сигналами, вызывающими инстинктивную ориентацию птицы головой вперед по ходу передвижения, а фиксирование птицы в момент захвата производится эластичными захватами кольцевого транспортера, посредством которого ее перемещают по полудуге до зоны "свободного падения", причем при "свободном падении" птицы инстинктивно производят выпуск лапок, за которые они подвешиваются на рамки подвесного пути, рамки подвесного пути устанавливаются под углом α к вертикали и имеют расширенные участки, а при выпуске лапок одна из них попадает в левый расширенный участок, другая - в правый, скользя с расширенного участка в сужающуюся часть рамки и плавно опрокидываясь вниз головой, кроме того, на всем пути проведения технологической операции по доставке птицы к подвесным путям осуществляют синхронизацию управлением подачи внешних сигналов и работой приводов ленточного транспортера эластичных захватов, кольцевого транспортера, и подвесных путей.
Преимущество заявляемого способа заключается в повышении его эффективности за счет повышения безопасности транспортировки птицы и уменьшения травматизма и стрессовых нагрузок при транспортировке и подвешивании, потери живого веса от стресса и повышения качества мяса, улучшения санитарно-гигиенических условий труда.
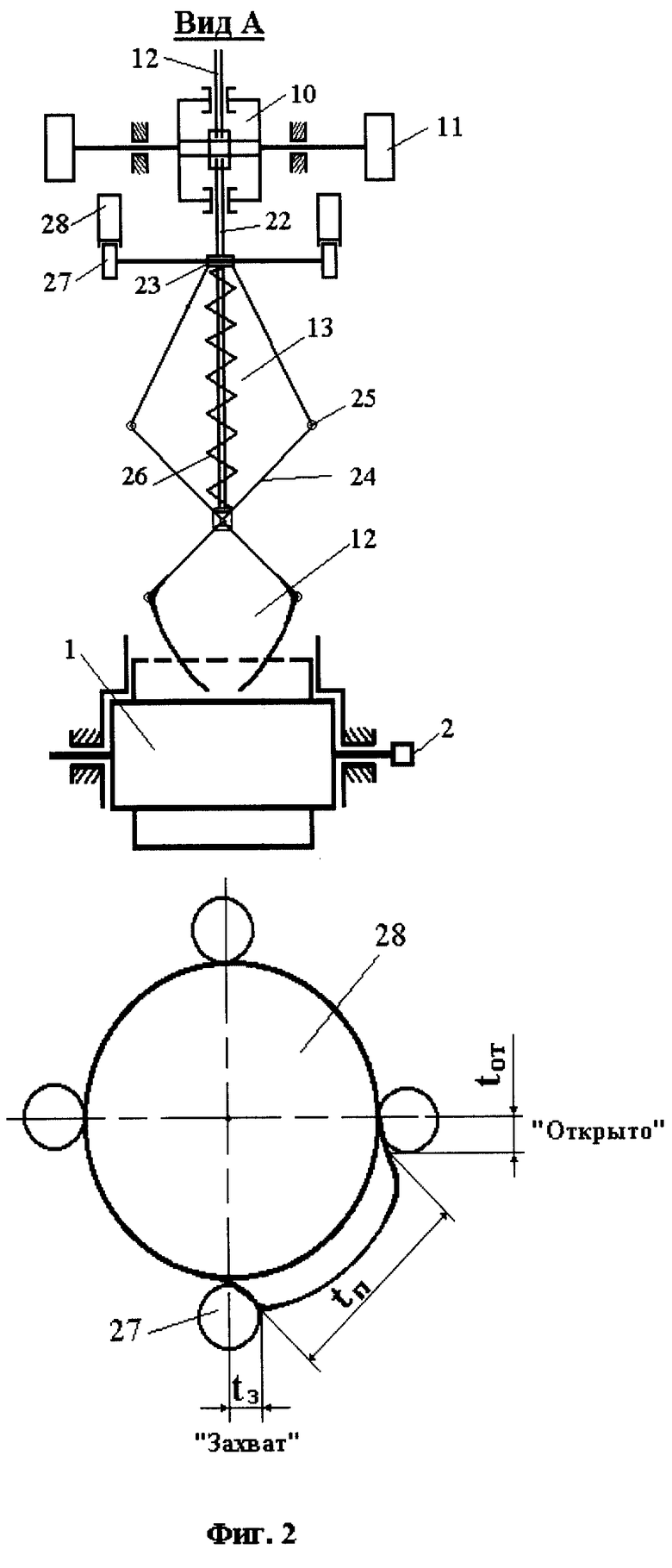
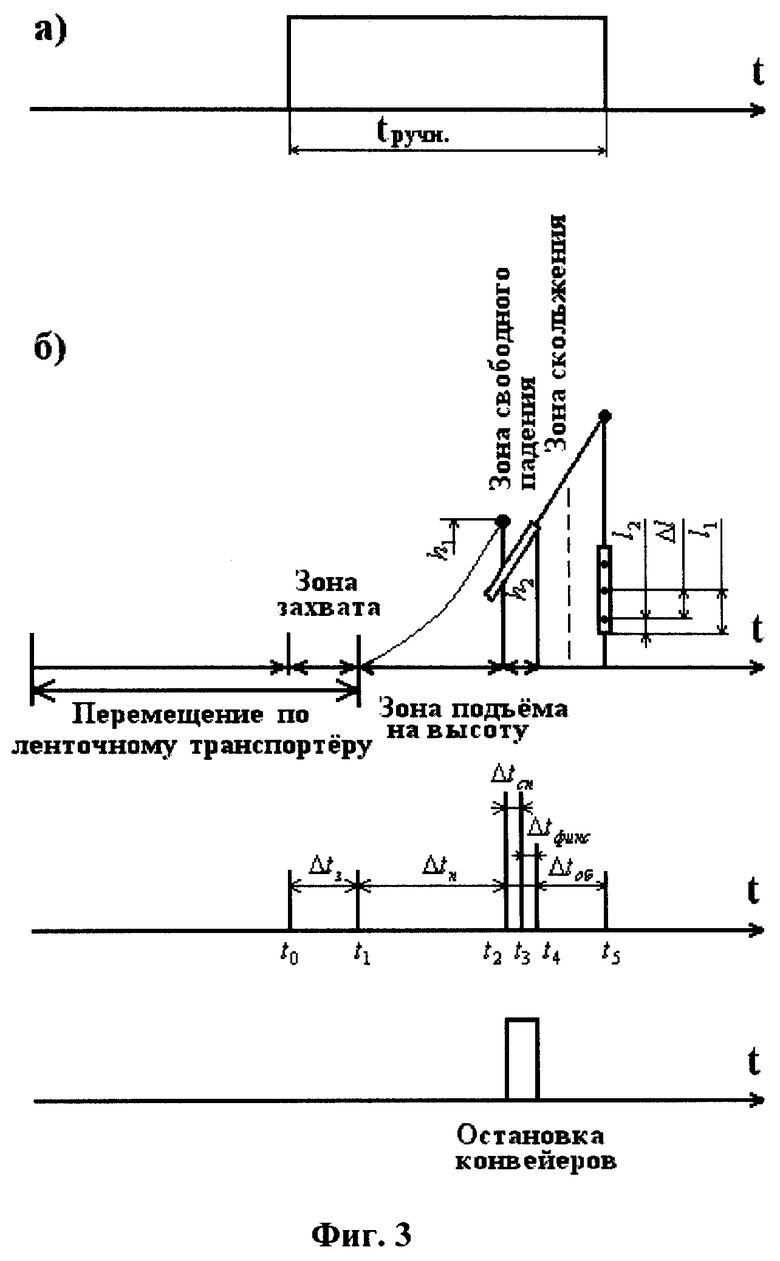
На фиг.1 (а, б) представлено устройство для подачи живой птицы на подвесные пути (вид сбоку и вид сверху); на фиг.2 - эластичный захват с приводом и жестким программатором; на фиг.3 - временные циклы операции подвешивания: а) - при ручном и б) - автоматизированном подвешивании.
Устройство для подачи живой птицы на подвесные пути, реализующее заявляемый способ, содержит ленточный транспортер 1, привод ленточного транспортера 2, узел поштучного разделения 3, эластичные щитки 4, боковые направляющие 5, установленные в желобе 6, источник внешних сигналов 7, зону автоматизированного захвата 8, датчик контроля птиц 9, кольцевой транспортер 10 с приводом 11 и с симметрично установленными эластичными захватами 12, управляемыми приводами 13, подвесной путь 14 с приводом 15, с рамками 16, имеющими расширенные участки 17, зону свободного падения 18, направляющий элемент рамки 19, систему управления 20, эластичные захваты 12 содержат шток 22, направляющий элемент (подвижные втулки) 23, подвижный механизм 24, шарнирные соединения плеч подвижного механизма 25, пружину 26, ролик 27, жесткий программатор 28.
Способ осуществляется следующим образом.
Птица подается на ленточный транспортер 1 поштучно с помощью узла разделителя 3 и перемещается с постоянной скоростью - υлт ленточного транспортера при включенном (работающем) приводе 2, а разделение птицы друг от друга на транспортере 1 обеспечивается эластичными щитками 4, боковыми направляющими 5 и желобом 6. Птица при перемещении в ограниченном полутемном пространстве инстинктивно реагирует на воздействие внешних сигналов, излучаемых источником 6, или их сочетание, вызывающее инстинктивную ориентацию головой вперед по ходу перемещения.
В качестве внешнего сигнала может быть использовано электрическое поле с генерацией аэроионов кислорода, их воздействие успокаивает птицу, а также световые или звуковые сигналы, которые могут восприниматься птицей, например: "журчание воды", вызывающее реакцию на удаление жажды при стрессах; "световые мерцания"; их комбинации успокаивающего действия. При воздействии на опытную партию определенного вида птицы модулированным электромагнитным излучением в области видимого спектра или звуковой частоты падающей капли воды или журчания вытекающей воды, определяют время инстинктивного отклика и параметры: частоту, интенсивность и мощность, периодичность воздействий, повторяют эти операции до тех пор, пока время инстинктивной ориентации будет совместимо с временем технологической операции. Полученные результаты используют при отладке технологической операции подачи и захвата. Транспортируемая птица достигает зоны автоматизированного захвата 8. Эластичный захват 12 находится в состоянии "Открыто" перед входом в зону захвата 8. Эластичный захват 12 осуществляет подхват и фиксацию птицы, эквидистантно ее боковой поверхности по сигналу датчика контроля 9 ее положения при срабатывании привода 13. При этом снижается вероятность случаев травматизма, т.е. захват за отдельные части птицы. Птица перемещается в противоположном направлении относительно поштучной подачи по полудуге до зоны свободного падения 18 с помощью кольцевого транспортера 10 при работе привода 11.
Параметры, характеризующие работоспособность устройства, реализующего способ, определяются из условий обеспечения производительности забоя - N за время работы - t. Например, N=20000, t=8 часов, быстродействие при ручном подвешивании определяется выражением 
Временной цикл изображен на фиг.3, а. Верхняя точка подъема на высоту h1 определяется высотой кольцевого транспортера 10 и подвесного пути 14 с рамками 16. Линейная скорость движения рамок 16 подвесного пути равна отношению длины между рамками на время:

Из условия равенства линейных скоростей подвесного пути - υпп и кольцевого транспортера - υкт
υпп=υкт

и из соотношения (3) определяем радиус кольцевого транспортера:

Птица достигает зоны свободного падения 18 за время t2 с одновременным подходом рамки 16. По сигналу датчика 9 в момент остановки конвейеров 2, 10, 14 срабатывает привод 13, выполненный, например, в виде пружины 26, ролика 27, двигающего по длине окружности радиусом R1 и R2 жесткого программатора 28 и эластичный захват 12 отпускает птицу в момент времени t2 (фиг.2). При этом определяют время и площадь инстинктивного расширения пальцев ног - Sн в зоне расширенного участка рамки - Sp, изготавливают рамки подвесного пути с площадью большей из условия Sр/Sн=1,1÷1,5. (5)
Птица при свободном падении без начальной скорости с высоты h1 - точки подъема пролетает расстояние Δh до высоты - h2, (Δh=h1-h2), за время определяемое из условия

Птица за время Δt3 успевает инстинктивно выпустить лапки. Ноги птицы попадают в приспособление рамки 16 всегда таким образом, чтобы одна нога попала в левый расширенный участок 17 рамки 16, а другая - в правый - 17 и скользят вдоль с расширенного в сужающуюся часть 17 рамки 16, установленной под углом α от вертикали, (фиг.1).
Угол наклона рамки 16 определяется из условия.
Птица в процессе свободного падения приобретает скорость - υ0 к моменту времени t3 и попадает в точку l1 (начальный широкий участок 17).

скользит вдоль направляющих рамки 16 до точки l2 в течении времени Δt4=t4-t3

В момент времени t4 птица проскользит расстояние Δl и попадет в сужающую часть лапок в рамки 16 (зона фиксации).

Угол наклона рамки определяется из выражения (9)
Оптимальный угол от ее вертикального положения

Ноги птицы за лапки фиксируются в зоне 17 рамки 16.
Время скольжения вдоль рамки определяется без учета трения из квадратного уравнения второй степени

решение которого позволяет определить время - Δt4

В режиме автоматического "захвата" и "подвешивания" птицы общее время равно:
Δt=Δt3+Δtп+Δtот+Δtсп+Δtск+Δtоп+Δtоб≤Δtрп=1,4 сек
где Δt3 - время срабатывания привода 13 при "захвате" птицы;
Δtп - время подъема птицы на высоту h1;
Δtот - время открытия захвата при срабатывании привода 13;
Δtсп - время свободного падения Δh1 и инстинктивного выпуска лапок;
Δtск - время скольжения лапок вдоль рамки;
Δtоп - время возврата рамки к вертикальному положению птицы "головой вниз";
Δtрп - время ручного подвешивания;
Δtоб - время, обеспечивающее безопасность птице, при подходе последующего захвата 12, иллюстрация моментов времени изображена на фиг.3.
Длина окружности жесткого программатора 28 определяет из условия Lжп=2·π·R*≥Rкт, где Rкт - радиус кольцевого транспортера, где R* - радиус жесткого программатора. Радиусы Rкт и R* определяются конструктивным исполнением (фиг.2).
Птица за время (Δtск+Δtоп) надежно фиксируется за лапки в сужающейся части рамки 16 и плавно опрокидывается вниз головой. Рамка 16 скользит вдоль направляющего элемента 19. Угол наклона рамки 16 уменьшается и переходит в вертикальное положение, смягчая опрокидывание птицы (фиг.1).
Система управления 20 осуществляет синхронизацию и управление источниками внешних сигналов 6, приводами 2, 11, 15, 13 при транспортировке и в моменты "сбрасывания" птицы, т.е. кратковременный останов конвейеров в автоматическом режиме в сочетании с механическими программами. Управление может осуществляться непосредственно обслуживающим персоналом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство для подвешивания птиц на подвесном конвейере | 2013 |
|
RU2608024C2 |
| Устройство для передачи битой птицы с подвесок конвейера ощипывания к подвескам конвейера потрошения | 1983 |
|
SU1326177A3 |
| Устройство для выбивки литейных форм | 1979 |
|
SU863173A1 |
| Способ подвешивания птицы на захватном приспособлении и устройство для подвешивания птиц | 2013 |
|
RU2606907C2 |
| Устройство для захвата, транспортирования и укладки плоских деталей в стопу | 1989 |
|
SU1712284A1 |
| Аппарат для смешивания волокнистых наполнительных веществ с вяжущими при приготовлении строительных материалов | 1932 |
|
SU30117A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ КУРИНЫХ ЛАПОК | 2017 |
|
RU2728868C1 |
| Установка для транспортирования паковок, например ленты, намотанной на катушки, от чесальных к ленточным машинам, а от последних к ровничным и прядильным машинам | 1960 |
|
SU135003A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕВЕШИВАНИЯ ТУШЕК ПТИЦЫ С ПОДВЕСОК КОНВЕЙЕРА УБОЯ НА ПОДВЕСКИ КОНВЕЙЕРА ПОТРОШЕНИЯ | 2008 |
|
RU2361406C1 |
| ПТИЦЕЗАЩИТНОЕ УСТРОЙСТВО ДЛЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ С ПОДВЕСНЫМИ ИЗОЛЯТОРАМИ И ЛИНИЯ ЭЛЕКТРОПЕРЕДАЧИ, СНАБЖЕННАЯ ТАКИМИ УСТРОЙСТВАМИ | 2013 |
|
RU2542355C2 |
Изобретение относится к пищевой промышленности и может быть использовано в убойных цехах на птицеперерабатывающих предприятиях. Способ включает поштучное передвижение птицы ленточным транспортером к месту захвата и фиксирование птицы с момента захвата до момента подвешивания на рамку подвесного пути за лапки. При передвижении птицы по ленточному транспортеру до места ее захвата на нее воздействуют внешними сигналами. Эти сигналы вызывают инстинктивную ориентацию птицы головой вперед по ходу передвижения. Фиксирование птицы в момент захвата производится эластичными захватами кольцевого транспортера, посредством которого их перемещают по полудуге до зоны "свободного падения". При "свободном падении" птицы инстинктивно производят выпуск лапок, за которые они подвешиваются на рамки подвесного пути. Рамки подвесного пути установлены под углом α к вертикали и имеют расширенные участки. В момент выпуска лапок птицы одной из них попадают в левый расширенный участок, другой - в правый, скользя с расширенного участка в сужающуюся часть рамки и плавно опрокидываясь вниз головой. На всем пути проведения технологической операции по доставке птицы к подвесным путям осуществляют синхронизацию управлением подачей внешних сигналов и работой приводов ленточного транспортера, эластичных захватов, кольцевого транспортера и подвесных путей. Использование изобретения позволит повысить эффективность подачи живой птицы на подвесные пути. 3 ил.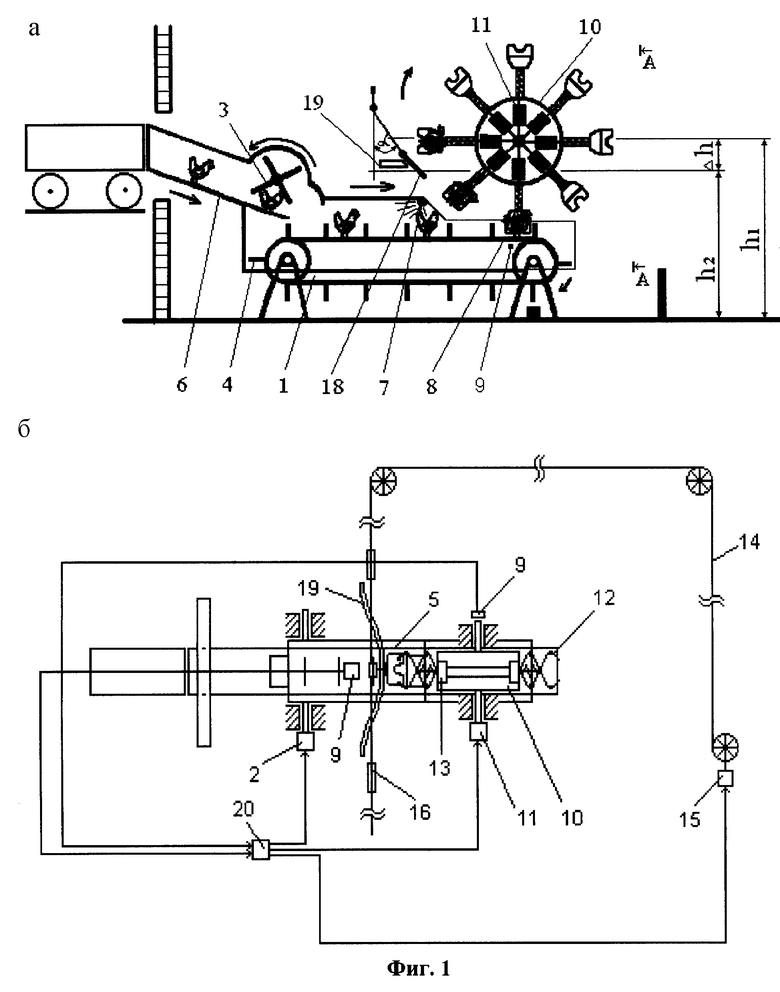
Способ подачи живой птицы на подвесные пути, включающий ее поштучное передвижение ленточным транспортером к месту захвата и фиксирование птицы с момента захвата до момента подвешивания на рамку подвесного пути, отличающийся тем, что при передвижении птицы по ленточному транспортеру до места захвата на нее воздействуют внешними сигналами, вызывающими инстинктивную ориентацию птицы головой вперед по ходу передвижения, а фиксирование птицы в момент захвата производится эластичными захватами кольцевого транспортера, посредством которого ее перемещают по полудуге до зоны "свободного падения", причем при "свободном падении" птицы инстинктивно производят выпуск лапок, за которые они подвешиваются на рамки подвесного пути, рамки подвесного пути устанавливаются под углом α к вертикали и имеют расширенные участки, а при выпуске лапок одна из них попадает в левый расширенный участок, другая - в правый, скользя с расширенного участка в сужающуюся часть рамки и плавно опрокидываясь вниз головой, кроме того, на всем пути проведения технологической операции по доставке птицы к подвесным путям осуществляют синхронизацию управлением подачи внешних сигналов и работой приводов ленточного транспортера эластичных захватов, кольцевого транспортера и подвесных путей.
| ГОРБАТОВ В.М | |||
| и др | |||
| Справочник по оборудованию предприятий мясной промышленности | |||
| М., "Пищевая промышленность", 1965, с.200-263 | |||
| Способ побуждения птицы к перемещению | 1990 |
|
SU1752300A1 |
| Устройство для подачи тушек птицыНА пОдВЕСНыЕ пуТи | 1978 |
|
SU797635A1 |
| Способ привлечения птицы в первые дни жизни к корму и питью | 1985 |
|
SU1528406A1 |
| Устройство подачи птицы | 1990 |
|
SU1727770A1 |

