Изобретение относится к буровой технике и может быть использовано на буровых установках для механизации спуско-подъемных операций при сборке или разборке бурильных и обсадных колонн, а также для бурения скважин.
В настоящее время на буровых установках применяются ключи различных типов, предназначенные для свинчивания бурильных и обсадных труб, при этом операции по докреплению или раскреплению резьбовых соединений выполняются либо вручную с использованием комплектов машинных ключей и пневмораскрепителей, либо ключами, оснащенными многоступенчатыми приводами настройки скоростей вращения и крутящих моментов.
Наиболее распространенным ключом для свинчивания или развинчивания бурильных труб является автоматический буровой ключ типа АКБ производства компании «ИжНефтеГаз» г. Ижевск (Буровой ключ автоматический стандартный АКБ. ТУ 26-02028-79), оснащенный пневматическими приводами вращения верхней трубы и стопорения нижней трубы.
К недостаткам этого ключа следует отнести:
- ограниченная возможность применения труб различного диаметра;
- ограниченная возможность передачи трубам высокого крутящего момента при свинчивании или развинчивании;
- отсутствие возможности производить автоматическое регулирование величин крутящего момента.
Известен ключ для свинчивания (развинчивания) буровых труб (патент на изобретение US 2015/0167409 А1, МПК Е21В 19/164, опубл. 18.06.2015). В известном ключе свинчивание (развинчивание) труб производится двумя встречными приводными блоками, каждый из которых оснащен гидромотором, редуктором и парой рабочих роликов. Докрепление (раскрепление) резьбового соединения выполняется отдельным механизмом, состоящим из корпуса, выполненного в виде скобы, в котором встречно друг другу смонтированы зажимы с гидроцилиндрами, при этом корпус имеет возможность поворота относительно собственной оси посредством гидроцилиндра. Удержание нижней трубы от проворота при выполнении операций свинчивания (довинчивания) и докрепления (раскрепления) осуществляется отдельным механизмом, состоящим из корпуса, в котором встречно друг другу смонтированы зажимы с гидроцилиндрами. Все исполнительные механизмы ключа установлены в одном корпусе.
Ключ имеет следующие недостатки:
- вращение верхней трубы осуществляют два приводных блока, содержащие гидромоторы повышенной мощности со значительным расходом масла, при этом получаемый крутящий момент не обеспечивает надежное докрепление или выполнение раскрепления резьбового соединения при работе с трубами большого диаметра;
- для докрепления (раскрепления) резьбового соединения используют два гидроцилиндра со значительными усилиями зажатия трубы, обратные реакции от действия гидроцилиндров замыкаются на корпусе ключа и передаются на его внешние конструкции, что снижает надежность работы ключа;
- приводные блоки имеют ограниченный горизонтальный ход, что не позволяет использовать ключ для широкого диапазона диаметров труб;
- ключ имеет монолитную конструкцию с размещенными внутри исполнительными механизмами, доступ к которым для обслуживания затруднен. Сборку (разборку), наладку и замену отдельных узлов и деталей нужно производить на специальных ремонтных участках.
Наиболее близким техническим решением, выбранным в качестве прототипа, является буровой ключ (патент на полезную модель RU 155113, МПК Е21В 19/16, опубл. 20.09.2015). Ключ буровой выполнен с открытым зевом для размещения скважинных труб и содержит:
- нижний корпус, в котором встречно друг другу смонтированы гидроцилиндры для зажатия нижней трубы;
- верхний корпус, в котором встречно друг другу смонтированы гидроцилиндры для зажатия верхней трубы;
- два встречно расположенных приводных блока, каждый из которых состоит из пары роликов для свинчивания верхней трубы с нижней, редуктора и гидромотора;
- гидроцилиндр для подвода роликов к верхней трубе;
- гидроцилиндр для докрепления соединяемых труб;
- механизм для перемещения, верхнее основание которого шарнирно соединено с его нижним основанием посредством двух пар вертикально ориентированных опор, при этом каждая пара опор соединена с гидроцилиндром для перемещения верхнего основания относительно нижнего.
Приводные блоки предназначены для свинчивания верхней трубы с нижней и расположены на верхнем корпусе. Механизм докрепления (раскрепления) резьбового соединения является отдельным узлом, содержащим смонтированные в верхнем корпусе гидроцилиндры для зажатия верхней трубы, которые зажимают верхнюю трубу уже после окончания свинчивания труб, и гидроцилиндр докрепления. Механизм зажима верхней трубы при свинчивании ее с нижней трубой представлен в описании бурового ключа только гидроцилиндром, посредством которого ролики подводятся к верхней трубе и закрепляются ней.
К недостаткам прототипа относятся:
- буровой ключ может найти применение только на буровых установках с малой грузоподъемностью, использующих трубы малого диаметра, так как приводные блоки для вращения верхней трубы установлены на узле докрепления и имеют ограниченный встречный ход друг к другу в силу конструктивных особенностей этого узла;
- перемещение приводных блоков осуществляется одним гидроцилиндром, что в сочетании с их ограниченным встречным ходом ведет к незначительным по величине усилиям прижатия роликов к верхней трубе;
- при работе с трубами разного диаметра зажим верхней трубы осуществляется не по оси трубы, а с некоторым смещением из-за применения рычажной системы механизма зажима;
- гидромоторы приводных блоков при использовании одноступенчатых редукторов с минимальным передаточным отношением обладают низким крутящим моментом;
- удержание нижней трубы от прокручивания осуществляется гидроцилиндрами, вмонтированными в нижний корпус, при этом гидроцилиндры имеют значительные усилия зажатия трубы. При докреплении (раскреплении) резьбового соединения свинчиваемых труб обратные реакции от действия гидроцилиндров замыкаются внутри нижнего корпуса, что снижает надежность работы бурового ключа;
- гидроцилиндры зажима верхней трубы механизма докрепления (раскреплении) резьбового соединения свинчиваемых труб обладают значительными усилиями зажатия трубы, обратные реакции от которых замыкаются на верхнем корпусе и передаются на другие элементы бурового ключа, что снижает надежность его работы;
- вертикально ориентированные опоры механизма для перемещения, шарнирно соединенные с верхним и нижним основанием, при воздействии гидроцилиндров после прохождения вертикального положения имеют действие падения бурового ключа, при этом в выходных отверстиях гидроцилиндров возникают гидравлические удары, приводящие к поломке гидросистемы;
- обратные реакции от действия гидроцилиндров узла докрепления резьбового соединения свинчиваемых труб передаются на шарниры и вертикальные опоры механизма для перемещения ключа, производя их разрушение.
Указанные недостатки стимулировали поиск новых решений. При этом учитывалось, что в настоящее время к буровым ключам предъявляется требование возможности использования ключа при работе с широким диапазоном диаметров труб, причем для труб диаметром более 127 мм, крутящие моменты для докрепления (раскрепления) резьбовых соединений должны составлять (80-120) кНм, что влечет за собой применение более высоких усилий зажатия труб (80-100) т с целью обеспечения их надежной фиксации. В этих случаях для зажатия труб применяются гидроцилиндры высокого давления (340-680) кг/см2 с диаметров поршней более 150 мм, что ведет к увеличению расхода рабочей жидкости и, следовательно, к применению мощных электродвигателей в маслостанции.
Задачей предлагаемого технического решения является создание робота бурового универсального с высоким крутящим моментом при использовании гидромоторов малой мощности с высокой частотой вращения приводного вала при обеспечении надежной фиксации труб и исключении передачи реактивных моментов на его внешние конструкции и выполняющим операции не только свинчивания (развинчивания) труб широкого диапазона диаметров без перенастройки устройства зажима верхней трубы, но и бурение скважин.
Технический результата заключается в достижении высокого крутящего момента без увеличения мощности приводов вращения труб, расширение функциональных возможностей бурового ключа, повышение надежности его работы.
Технический результат достигается тем, что в роботе буровом универсальном, содержащим верхний модуль, включающий два встречно расположенных приводных блока с гидромоторами, редукторами и парами рабочих роликов для свинчивания верхней трубы с нижней, механизм верхней трубы с гидроцилиндром, а также механизм докрепления (раскрепления) резьбового соединения, приводимый в движение гидроцилиндром, нижний модуль, включающий два встречно расположенных блока зажима нижней трубы с гидроцилиндрами, кроме того, позиционер с гидроцилиндрами, согласно предлагаемому техническому решению:
- приводные блоки, механизм зажима верхней трубы и механизм докрепления (раскрепления) резьбового соединения установлены на общей плите, выполненной с разъемом для трубы;
- приводной блок содержит коробку зубчатых передач, включающую центральную шестерню, которая находится в зацеплении с двумя шестернями рабочих роликов, с шестерней редуктора и шестерней узла докрепления (раскрепления) резьбового соединения;
- на редукторе каждого приводного блока установлено не менее двух гидромоторов малой мощности с высокой частотой вращения приводного вала, объединенных гидропроводом;
- каждый приводной блок снабжен парой роликовой опорой с обеспечением контакта с механизмом зажима верхней трубы;
- механизм зажима верхней трубы состоит из двух узлов со встречным движением друг к другу, при этом каждый узел зажима верхней трубы включает клин и гидроцилиндр;
- механизм докрепления (раскрепления) резьбового соединения состоит из двух узлов, каждый из которых включает вертикальный вал, содержащий редуктор и шестерню для обеспечения контакта с шестерней узла докрепления (раскрепления) резьбового соединения, а также гидроцилиндры для докрепления, раскрепления резьбовых соединений и перемещения вертикального вала вниз;
- блоки зажима нижней трубы заключены в корпус с разъемом для трубы, установленный под общей плитой;
- каждый блок зажима нижней трубы содержит клин, гидроцилиндр, прижим, соответствующий диаметру нижней трубы, и роликовую опору для обеспечения контакта клина и прижима.
Кроме того, в роботе буровом универсальном:
- позиционер включает закрепленную на внешней опорной плите наружную неподвижную колонну, в которой установлена подвижная по вертикали внутренняя колонна, содержащая в верхней части горизонтальную направляющую, включающую, по меньшей мере, один гидроцилиндр горизонтального перемещения, шарнирно соединенный с корпусом нижнего модуля, который установлен на горизонтальную направляющую с возможностью его перемещения за счет вертикальных роликов, содержащихся на боковых сторонах горизонтальной направляющей.
Предлагаемое техническое решение поясняется чертежами, где:
фиг.1 - общий вид робота бурового универсального, вид сбоку в рабочей позиции №2;
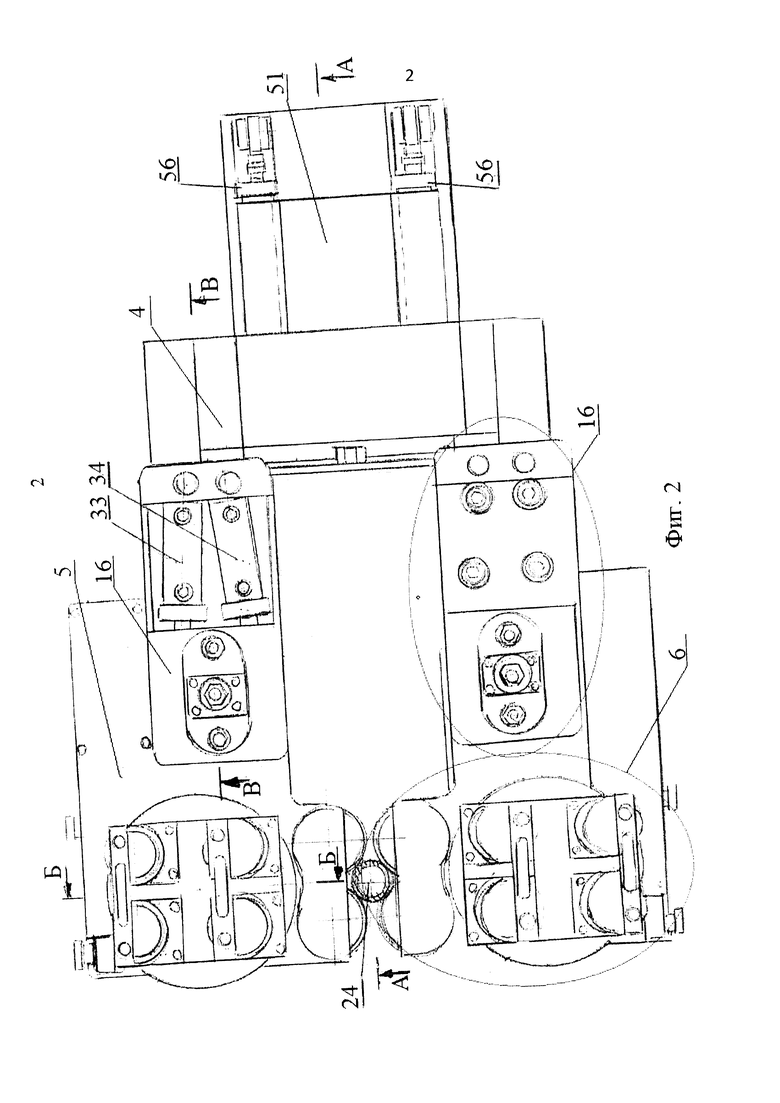
фиг.2 – общий вид сверху; для наглядности один из узлов докрепления резьбового соединения изображен со снятой крышкой;
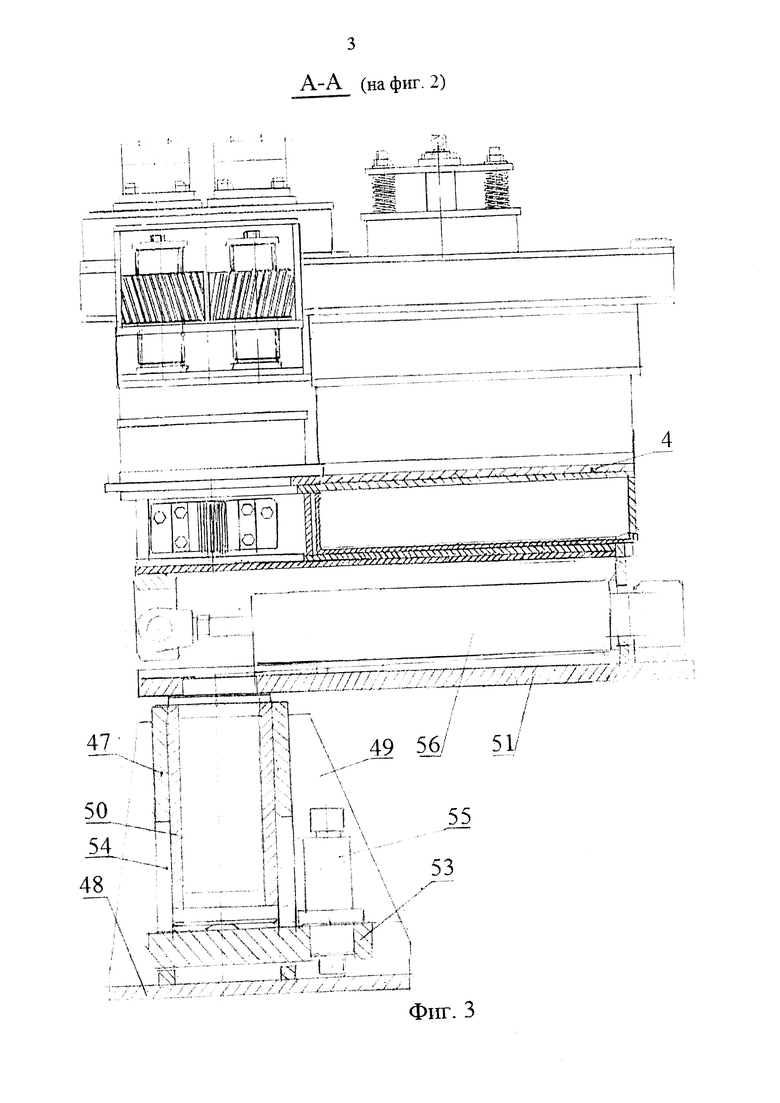
фиг.3 – вид робота в исходной (резервной) позиции №1 по разрезу А - А на фиг.2, поясняющий, в том числе, устройство позиционера;
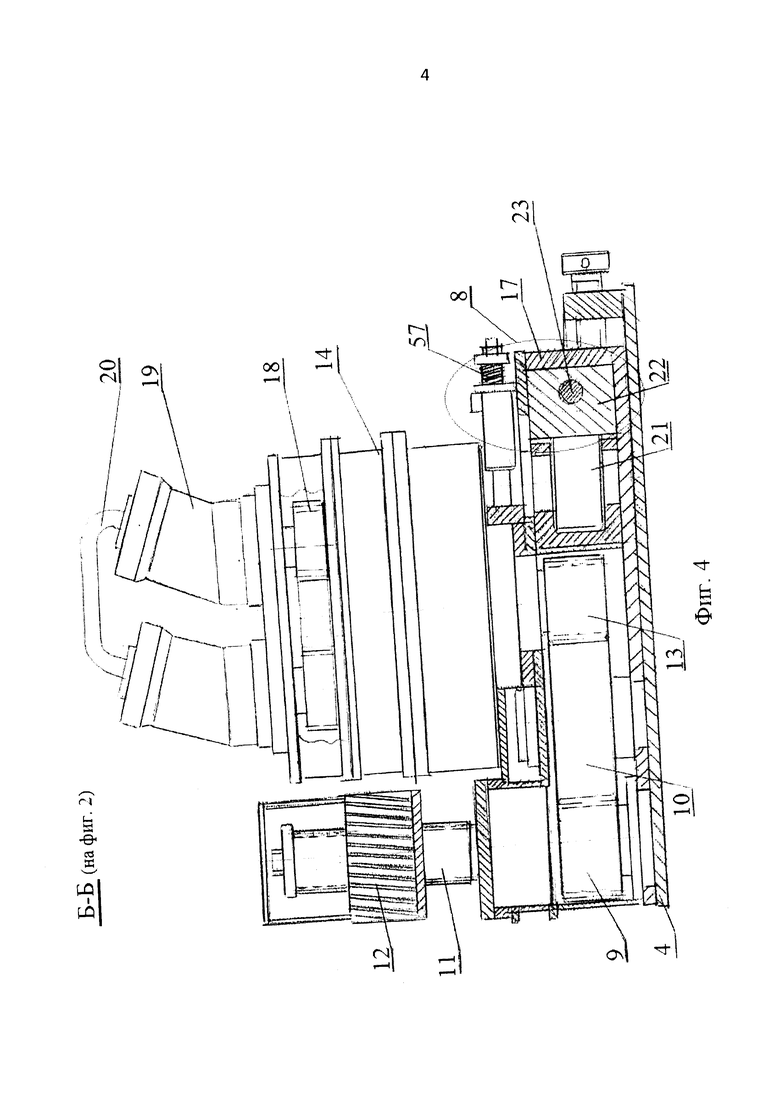
фиг.4 – вид робота по разрезу Б - Б на фиг.2, поясняющий устройство левого приводного блока и связанного с ним узла механизма зажима верхней трубы;
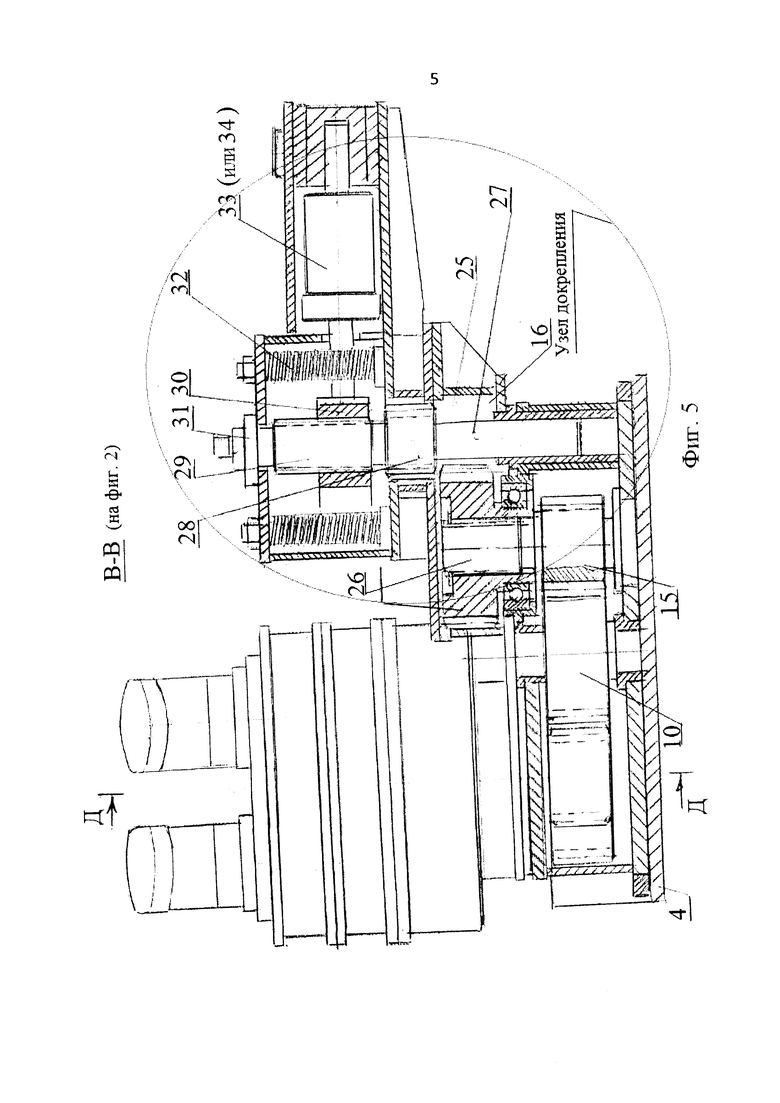
фиг.5 – вид робота по разрезу В - В на фиг.2, поясняющий устройство связанного с левым приводным блоком узла механизма докрепления (раскрепления) резьбового соединения;
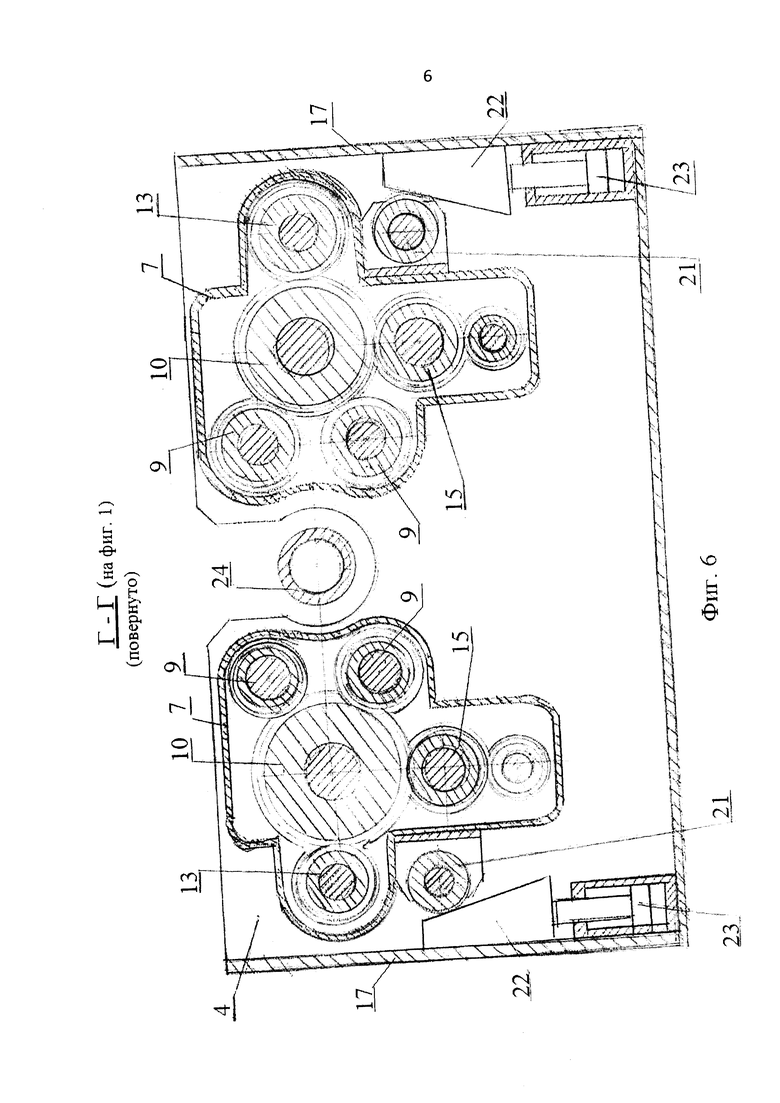
фиг.6 – вид робота по разрезу Г - Г на фиг.1 (повернуто), поясняющий устройство приводных блоков и механизма зажима верхней трубы;
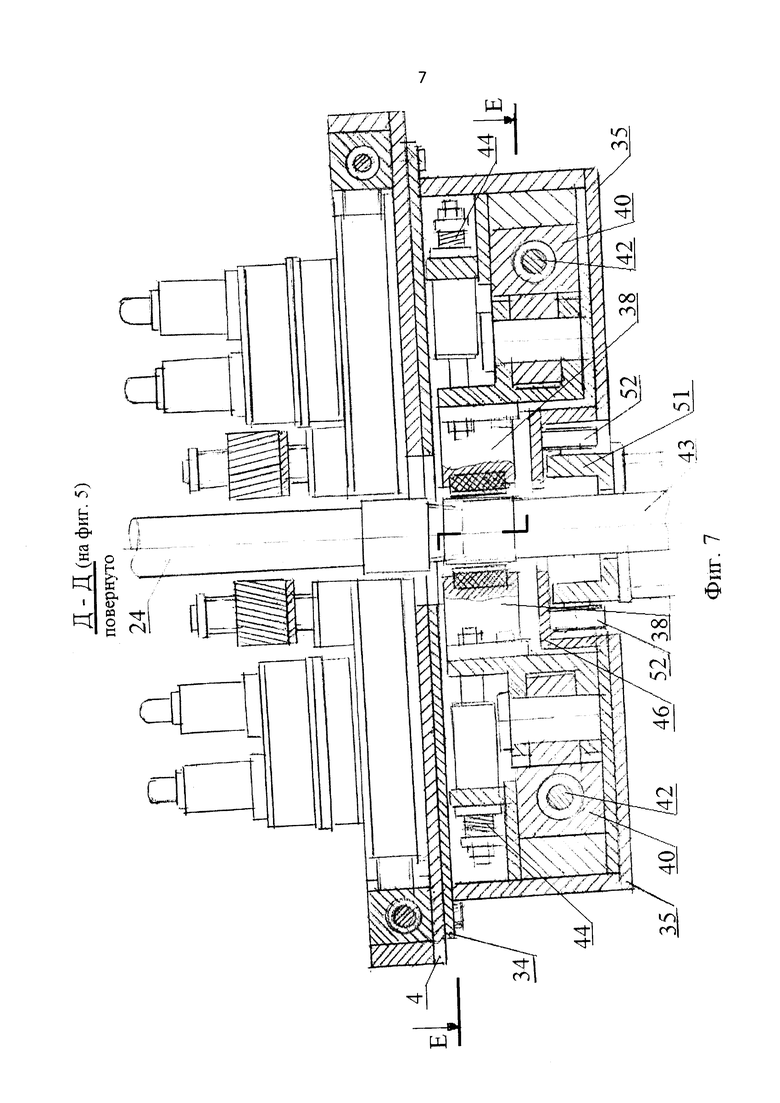
фиг.7 – вид робота по разрезу Д - Д на фиг.5, поясняющий расположение нижнего модуля робота относительно верхнего модуля, а также устройство блоков зажима нижней трубы в корпусе нижнего модуля;
фиг.8 – вид робота по разрезу Е - Е на фиг.7 (повернуто), поясняющий устройство блоков зажима нижней трубы в корпусе нижнего модуля.
Робот буровой универсальный состоит из трех отдельных технологических модулей (фиг.1):
- верхний модуль 1, предназначенный для вращения верхней трубы 24 при свинчивании (развинчивании) колонны труб, докрепления (раскрепления) резьбовых соединений и бурения скважин;
- нижний модуль 2, предназначенный для зажима нижней трубы 43;
- позиционер 3 предназначен для горизонтального и вертикального перемещения робота.
Верхний модуль 1 (фиг.1) установлен на общей плите 4, имеющей разъем для трубы, и включает в себя:
- два встречно расположенных приводных блока – левый 5 и правый 6 (фиг.2);
- механизм зажима верхней трубы, который состоит из двух узлов 8 (фиг.4), каждый из которых находится в контакте с соответствующим ему приводным блоком;
- механизм докрепления (раскрепления) резьбового соединения, который состоит из двух узлов 16 (фиг.2, 5), каждый из которых имеет возможность вступать в контакт с соответствующим ему приводным блоком.
Приводные блоки 5, 6 установлены на общей плите 4 с возможностью перемещения по ней при воздействии на них механизма зажима верхней трубы. Каждый из приводных блоков 5, 6 содержит пару рабочих роликов 12 (фиг.4), коробку зубчатых передач 7 (фиг.7), на которой установлен редуктор 14 (фиг.4) с группой гидромоторов 19 малой мощности, но с высокой частотой вращения приводного вала. Гидромоторы 19 объединены гидропроводом 20.
Количество гидромоторов 19 зависит от потребного крутящего момента, необходимого для выполнения операций свинчивания (развинчивания) труб и бурения скважин и может составлять от двух до четырех.
В редукторе 14 (фиг.4) размещены шестеренные блоки 18 (показаны частично), посредством которых вращение и крутящий момент от гидромоторов 19 передается на шестерню 13, расположенную в коробке передач 7 (фиг.6).
Коробка зубчатых передач 7 (фиг.4, 6) содержит центральную шестерню 10, которая находится в зацеплении с одной стороны с шестерней 13 редуктора 14, а с противоположной стороны – с двумя шестернями 9, которые передают вращение рабочим роликам 12, установленным на шлицевых валах 11. Также центральная шестерня 10 находится в зацеплении с шестерней 15 (фиг.5, 6), расположенной между шестерней 13 редуктора 14 и шестерней 9 рабочего ролика 12. Шестерня 15 имеет возможность вступать в контакт с узлом 16 докрепления (раскрепления) резьбового соединения (фиг.5) посредством установленной на одном валу с ней шестерней 26, которая является элементом узла 16 (фиг.5). На боковой стороне корпуса коробки зубчатых передач 7 (фиг.6) установлена роликовая опора 21, с помощью которой осуществляется контакт приводного блока 5, 6 с узлом 8 зажима верхней трубы.
Применение в каждом приводном блоке 5, 6 не менее двух гидромоторов малой мощности, обладающих высокими частотами вращения приводного вала и низкими крутящими моментами, позволяет при сложении крутящих моментов, с учетом передаточного отношения редуктора, получить более высокий крутящий момент, чем при использовании на каждом приводном блоке одного гидромотора повышенной мощности с высокой частотой вращения приводного вала. В совокупности с описанной конструкцией коробки зубчатых передач 7 предлагаемое исполнение приводных блоков 5, 6 позволяет иметь ускоренное вращение рабочих роликов 12 и высокий крутящий момент, необходимые для выполнения операций свинчивания (развинчивания) труб широкого диапазона диаметров и бурения скважин.
Узлы 16 докрепления (раскрепления) резьбового соединения (фиг.2, 5) смонтированы на общей плите 4. Каждый узел 16 содержит вертикальный вал 27, на котором установлены шестерня 28 и расположенный под ней редуктор 25 с шестерней 26, односторонне расположенной относительно вала 27. В верхней части вертикальный вал 27 имеет две расточки: наружную шлицевую расточку 29, на которую установлен двуплечий рычаг 30, и внутреннюю цилиндрическую расточку (на фиг. не показано), где установлен гидроцилиндр 31. Двуплечий рычаг 30 шарнирно соединен с горизонтально ориентированными гидроцилиндрами 33, 34, один из которых предназначен для докрепления резьбового соединения труб, а другой – для раскрепления.
Вертикальный вал 27 имеет возможность под воздействием гидроцилиндра 31 перемещаться вниз, при этом шестерня 28 вертикального вала 27 входит в зацепление с шестерней 26 редуктора 25. При сбросе давления в гидроцилиндре 31 пружины 32 возвращают вертикальный вал 27 в верхнее исходное положение.
Также вертикальный вал 27 может поворачиваться вокруг своей оси при воздействии на него двуплечего рычага 30, приводимого в движение одним из гидроцилиндров 33, 34.
При нижнем положении вертикального вала 27 и при воздействии на него двуплечего рычага 30 шестерня 28 приводит в движение шестерню 26, которая посредством шестерен 15, 10 и 9, расположенных в коробке передач 7, передает вращение и крутящий момент рабочим роликам 12 для выполнения операции докручивания или раскручивания резьбового соединения.
Предлагаемое исполнение узлов поз.16 механизма докручивания (раскручивания) резьбового соединения позволяет исключить из конструкции робота стопорный ключ как самостоятельное устройство.
Узлы 8 зажима верхней трубы 24 (фиг.4, 6) установлены симметрично вдоль противоположных сторон общей плиты 4. Каждый узел 8 содержит клин 22 и гидроцилиндр 23. Клинья 22 при воздействии на них гидроцилиндров 23 имеют возможность перемещения вдоль направляющих поз.17, неподвижно смонтированных по боковым сторонам общей плиты 4. При этом клинья 22 оказывают давление на опорные ролики 21, тем самым смещают приводные блоки 5, 6 и осуществляют прижатие рабочих роликов 12 к верхней трубе 24 с усилием. При отключении гидроцилиндров 23 пружины 57 возвращают приводные блоки 5, 6 в исходное положение.
Предлагаемый клиновой механизм зажима верхней трубы обеспечивает ее надежную фиксацию при выполнении операций свинчивания (развинчивания) труб с последующим докреплением (раскреплением) резьбового соединения при работе с трубами широкого диапазона диаметров без каких-либо дополнительных перенастроек. Обратные реакции от действия клиньев 22 на опорные плоскости общей плиты 4 имеют разнонаправленные знаки и взаимно уничтожаются, увеличивая тем самым надежность работы робота.
Нижний модуль 2 (фиг.1, 7, 8) установлен под общей плитой 4 и представляет из себя корпус с разъемом для трубы, в котором расположены два блока 36 зажима нижней трубы 43 (фиг.7, 8). Верхняя плита 34 корпуса (фиг.7) смонтирована с общей плитой 4, например, болтовыми соединениями. На нижней плите 35 корпуса встречно установлены блоки 36 зажима нижней трубы.
Каждый блок 36 зажима нижней трубы (фиг.7, 8) содержит прижим 38, соответствующий диаметру нижней трубы 43, связанный с ним опорный ролик 39 для контакта с клином 40, и гидроцилиндр 42. В прижиме 38 установлена твердосплавная плашка 41. Клинья 40 при воздействии на них гидроцилиндров 42 имеют возможность перемещаться вдоль боковых плит 37 корпуса. При этом клинья 40 посредством опорных роликов 39 приводят в движение прижимы 38, которые осуществляют зажим нижней трубы 43 с усилием. Отвод прижима 38 от трубы производится посредством пружинных стяжек 44 и пружин 45.
Предлагаемый клиновой механизм зажима нижней трубы обеспечивает ее надежную фиксацию при выполнении операций свинчивания (развинчивания) труб с последующим докреплением (раскреплением) резьбового соединения. Обратные реакции от действия клиньев 40 на опорные плоскости нижней плиты 35 имеют разнонаправленные знаки и взаимно уничтожаются, повышая тем самым надежность работы робота.
Конструкция исполнительного механизма робота, состоящая из модулей 1 и 2, является простой и компактной и позволяет устанавливать ее на различного вида позиционеры.
Предлагаемое техническое решение конструкции позиционера является частным случаем его исполнения.
Для установки исполнительного механизма робота на позиционер 3 корпус нижнего модуля 2 имеет паз 46 (фиг.7, 8).
Позиционер 3 (фиг.1, 3) содержит наружную неподвижную колонну 47, внутреннюю подвижную колонну 50, горизонтальную направляющую 51, по меньшей мере один гидроцилиндр 55 вертикального перемещения и по меньшей мере один гидроцилиндр 56 горизонтального перемещения.
Наружная неподвижная колонна 47 (фиг.3) смонтирована на опорной плите 48, предназначенной для установки позиционера 3 на пол буровой установки. Для устойчивости наружная неподвижная колонна 47 связана с опорной плитой ребрами жесткости 49. Наружная неподвижная колонна 47 выполнена с вертикальной цилиндрической расточкой для внутренней подвижной колонны 50 и с горизонтальным пазом 54 в нижней части колонны 47. В горизонтальном пазу 54 смонтирована с возможностью перемещения вверх опорная плита 53, на которую установлена внутренняя подвижная колонна 50. С внешней стороны неподвижной наружной колонны 47 опорная плита 53 содержит гидроцилиндр 55 вертикального перемещения.
В верхней части внутренней подвижной колонны 50 смонтирована горизонтальная направляющая 51 с установленными по ее боковым сторонам вертикальными роликами 52. Горизонтальная направляющая 51 содержит, по меньшей мере, один гидроцилиндр 56 горизонтального перемещения (фиг.2, 3). На горизонтальную направляющую 51 производят установку нижнего модуля 2 посредством паза 46 (фиг.7, 8), при этом гидроцилиндр 56 горизонтального перемещения шарнирно соединен с нижней плитой 35 корпуса нижнего модуля 2.
Предлагаемая конструкция позиционера позволяет уменьшить габариты робота.
Таким образом, предлагаемое техническое решение выполняет поставленную задачу и имеет в качестве технического результата создание робота бурового универсального со следующими характеристиками:
- высокий крутящий момент и ускоренное вращение рабочих роликов, которые достигаются благодаря предлагаемой конструкции приводных блоков верхнего модуля без увеличения мощности приводов вращения труб;
- надежная фиксация труб за счет предлагаемых клиновых механизмов зажима нижней и верхней труб, которые значительно увеличивают усилия прижатия зажимных устройств к трубам. Применение для зажима верхней и нижней труб клиновых механизмов позволяет при незначительных диаметрах гидроцилиндров получать более высокие усилия зажима труб и снижает мощность электродвигателей маслостанции;
- механизм докрепления (раскрепления) резьбовых соединений как самостоятельное устройство отсутствует, а его функцию выполняет описанный выше модуль 1;
- расширенные функциональные возможности, т.к. робот выполняет не только операции свинчивания (развинчивания) труб широкого диапазона диаметров с последующим докреплением (раскреплением) резьбового соединения, но и операции бурения скважин, что возможно благодаря выше перечисленным характеристикам: высокий крутящий момент и надежная фиксация труб. При этом благодаря встречному расположению приводных блоков и клиновому механизму зажима верхней трубы отсутствует необходимость при работе с трубами различных диаметров производить какие-либо перенастройки в верхнем модуле 1;
- повышенная надежность робота обеспечивается за счет применения самостоятельных узлов и блоков в исполнительных механизмах.
Предлагаемое техническое решение обладает эффективностью, которая складывается из следующего:
- сокращение времени выполнения спуско-подъемных операций;
- снижение энергоемкости за счет уменьшения мощности электродвигателя насоса маслостанции, т.к. при использовании гидромоторов малой мощности снижается расход рабочей жидкости.
Робот буровой универсальный обладает простотой конструкции, состоящей из трех самостоятельных модулей с рабочими органами в виде отдельных узлов и блоков, и не требует больших трудозатрат при его эксплуатации. Сборка (разборка), наладка и замена отдельных узлов и блоков проста ввиду их высокой взаимозаменяемости, а также использования в их конструкции симметричных по форме деталей, и может быть произведена на месте эксплуатации робота бурового универсального.
Робот буровой универсальный работает следующим образом.
Выполнении спуско-подъемных операций.
Средствами, имеющимися на буровой площадке, очередную верхнюю трубу 24 устанавливают на ось скважины (если эта труба не была установлена ранее) и вводят ее резьбовую часть в резьбовую часть нижней трубы 43.
Все операции свинчивания и докрепления (раскрепления и развинчивания) выполняются в автоматическом режиме.
Перед выполнением операций робот находится в исходном положении (позиция №1) на расстоянии от оси скважины, равном величине горизонтального хода позиционера 3.
В позиции №1 производят подготовку робота к работе, включая:
- установку прижимов 38 с плашками 41 под соответствующий диаметр трубы (фиг.8);
- установку на пульте управления ограничительного крутящего момента.
Операцию сборки колонны (свинчивание) производят в следующем порядке.
С помощью гидроцилиндров 56 (фиг.3) робот из исходной позиции №1 переходит в рабочую позицию №2.
Далее подается давление в гидроцилиндры 42 (фиг.8) блоков 36 зажима нижней трубы 43. Клинья 40 начинают движение и, воздействуя на опорные ролики 39, прижимают прижимы 38 к трубе 43 с усилием.
По окончании процесса зажатия нижней трубы давление подается в гидроцилиндры 23 (фиг.6) узлов 8 зажима верхней трубы 24. Клинья 22, перемещаясь по общей плите 4, воздействуют на роликовые опоры 21, передвигая при этом коробки зубчатых передач 7 навстречу друг другу, и прижимают рабочие ролики 12 (фиг.4) к верхней трубе 24 с усилием, соответствующим давлению в гидросети.
Затем подается давление в гидромоторы 19 (фиг.4). Шестеренные блоки 18 редукторов поз.14 приводят в движение шестерни 13, 10 и 9, которые расположены в коробках передач 7 (фиг.4, 6). Шестерни 9 передают вращение и крутящий момент рабочим роликам 12, а через них – верхней трубе 24. Осуществляется процесс ускоренного свинчивания верхней трубы 24 с нижней трубой 43.
При касании торцов верхней и нижней труб резко увеличивается давление в гидросистеме и, при достижении установленного оператором ограничительного момента, гидромоторы 19 могут отключаются и работу начинают узлы 16 докрепления (раскрепления) резьбового соединения (фиг.5). Включаются гидроцилиндры 31, вертикальные валы 27 вместе с шестернями 28 опускаются вниз, при этом шестерни 28 входят в зацепление с шестернями 26 редукторов 25. Включаются гидроцилиндры 33 (предназначенные для докрепления резьбовых соединений) (фиг.2, 5), которые воздействуют на двуплечие рычаги 30. Происходит поворот вертикальных валов 27 и шестерни 28 приводят в движение шестерни 26, которые посредством шестерен 15, 10 и 9, расположенных в коробке передач 7 (фиг.6), передают вращение и крутящий момент рабочим роликам 12 и верхней трубе 24. Осуществляется процесс докрепления резьбового соединения, который завершается при достижении максимального крутящего момента, зависящего от установленного оператором на пульте управления предельного момента.
Производится сброс давления в гидросети и переключение работы на режим «Реверс».
В режиме «Реверс» последовательно выполняются команды:
- сброс давления в гидроцилиндрах 23 (фиг.4, 6) механизма зажима верхней трубы 24. Под действием пружин 57 (фиг.4), установленных в приводных блоках 5, 6, осуществляется отвод рабочих роликов 12 от верхней трубы 24;
- сброс давления в гидроцилиндрах 42 механизма зажима нижней трубы 43. Под действием пружинных стяжек 44 и пружин 45 прижимы 38 отводятся от нижней трубы;
- подача давления в гидроцилиндры 56 (фиг.1) горизонтального перемещения робота. Робот из позиции №2 переходит в позицию №1. На этом операция свинчивания с докреплением завершается.
Операция разборки колонны (развинчивание) производится следующим образом. Аналогично, как и при осуществлении операции сборки колонны (свинчивание), робот подводят к скважине, производится зажим нижней и верхней труб. Далее подается давление в гидромоторы 19 приводных блоков 5, 6 и в гидроцилиндры 34 (предназначенные для раскрепления) узлов 16 докрепления (раскрепления) резьбовых соединений. При повышении давления в гидросети создается максимальный крутящий момент, что влечет за собой срыв резьбы в резьбовом соединении, при этом верхняя труба 24 получает поворот на угол, соответствующий ходу двуплечего рычага 30 в узле 16. После чего верхняя труба получает ускоренное вращение и производится операция развинчивания резьбового соединения. По окончании операции подается команда на сброс давления в гидросети и на включение режима «Реверс». С окончанием выполнения команд режима «Реверс» операция раскрепления резьбового соединения и развинчивания труб завершается.
Выполнение операции бурения скважин.
Нижний модуль 2 с расположенным в нем механизмом зажима нижней трубы в операции бурения участие не принимает.
Для выполнения операции бурения скважин очередную свечу подвешивают на лебедке буровой установки, верхний конец свечи соединяют со стволом вертлюга буровой установки (на фиг. не показано), а нижний конец соединяют с колонной, находящейся в скважине.
При выполнении операции бурения скважин в каждом приводном блоке 5, 6 используют все гидромоторы 19.
Передача крутящего момента трубе осуществляется через шестерни 15, 10, 9.
Операция бурения скважины выполняется следующим образом.
При включении гидроцилиндра 55 вертикального перемещения (фиг.3) опорная плита 53 вместе с установленной на ней внутренней подвижной колонной 50 начинает движение вверх, поднимая рабочие модули на высоту хода гидроцилиндра 55.
Подается давление в гидроцилиндры 23, осуществляется прижим рабочих роликов 12 к трубе 24 с усилием и труба 24 получает вращение с крутящим моментом. Под действием лебедки буровой установки труба 24 опускается вниз совместно с роботом, производя бурение скважины. При достижении роботом нижнего положения подача давления в гидроцилиндры 23, осуществляющие прижатие рабочих роликов 12 к трубе 24, приостанавливается, приводные блоки 5, 6 под действием пружин 57 (фиг.4) отводятся от трубы и подается давление в гидроцилиндр 55 вертикального перемещения робота. При достижении роботом крайнего верхнего положения снова производится подача давления в гидроцилиндры 23, рабочие ролики 12 снова зажимают трубу и процесс повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| КЛЮЧ ДЛЯ СВИНЧИВАНИЯ И РАЗВИНЧИВАНИЯ ЗАМКОВЫХ СОЕДИНЕНИЙ СКВАЖИННЫХ ТРУБ | 2003 |
|
RU2268983C2 |
| СПОСОБ СВИНЧИВАНИЯ ИЛИ РАЗВИНЧИВАНИЯ РЕЗЬБОВЫХ СОЕДИНЕНИЙ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2273716C2 |
| ВЕРХНЕПРИВОДНОЕ БУРИЛЬНОЕ УСТРОЙСТВО АНАТОЛИЯ ЛИТВИНОВА | 1995 |
|
RU2105861C1 |
| КЛЮЧ ДЛЯ СВИНЧИВАНИЯ И РАЗВИНЧИВАНИЯ ЗАМКОВЫХ СОЕДИНЕНИЙ СКВАЖИННЫХ ТРУБ | 1994 |
|
RU2078901C1 |
| СПОСОБ СВИНЧИВАНИЯ ИЛИ РАЗВИНЧИВАНИЯ РЕЗЬБОВЫХ СОЕДИНЕНИЙ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2086400C1 |
| ТРУБОЗАЖИМНОЕ УСТРОЙСТВО ДЛЯ РЕЗЬБОВОГО СОЕДИНЕНИЯ ТРУБЧАТЫХ ЭЛЕМЕНТОВ | 1994 |
|
RU2078900C1 |
| КЛЮЧ БУРОВОЙ СТАЦИОНАРНЫЙ | 2007 |
|
RU2353749C2 |
| УСТРОЙСТВО ДЛЯ ЗАЖИМА ТРУБНЫХ ЭЛЕМЕНТОВ | 2003 |
|
RU2268984C2 |
| ВЫСОКОМОМЕНТНЫЙ ТРУБНЫЙ КЛЮЧ | 1991 |
|
RU2019677C1 |
| Устройство для свинчивания-развинчивания труб | 1983 |
|
SU1145118A1 |


Изобретение относится к буровой технике и может быть использовано на буровых установках для механизации спуско-подъемных операций при сборке или разборке бурильных и обсадных колонн, а также для бурения скважин. Технический результат заключается в достижении высокого крутящего момента без увеличения мощности приводов вращения труб, расширении функциональных возможностей и повышении надежности работы бурового ключа. Робот буровой универсальный содержит верхний модуль, нижний модуль и позиционер с гидроцилиндрами. Верхний модуль включает установленные на общей плите с разъемом для трубы два встречно расположенных приводных блока с гидромоторами, редукторами и парами рабочих роликов для свинчивания верхней трубы с нижней, механизм зажима верхней трубы, а также механизм докрепления (раскрепления) резьбового соединения. Нижний модуль включает два встречно расположенных блока зажима нижней трубы, заключенные в корпус с разъемом для трубы, установленный под общей плитой, при этом каждый блок зажима содержит клин, гидроцилиндр, прижим, соответствующий диаметру нижней трубы, и роликовую опору для обеспечения контакта клина и прижима. Каждый приводной блок содержит коробку зубчатых передач, включающую центральную шестерню, которая находится в зацеплении с двумя шестернями рабочих роликов, с шестерней редуктора и с шестерней узла докрепления (раскрепления) резьбового соединения. Приводной блок снабжен роликовой опорой с обеспечением контакта с механизмом зажима верхней трубы, состоящим из двух узлов со встречным движением друг к другу. Каждый узел зажима верхней трубы включает клин и гидроцилиндр. Механизм докрепления (раскрепления) резьбового соединения состоит из двух узлов, каждый из которых включает вертикальный вал, содержащий редуктор и шестерню для обеспечения контакта с шестерней узла докрепления (раскрепления) резьбового соединения, а также гидроцилиндры для докрепления (раскрепления) резьбовых соединений и перемещения вертикального вала вниз. 1 з.п. ф-лы, 8 ил.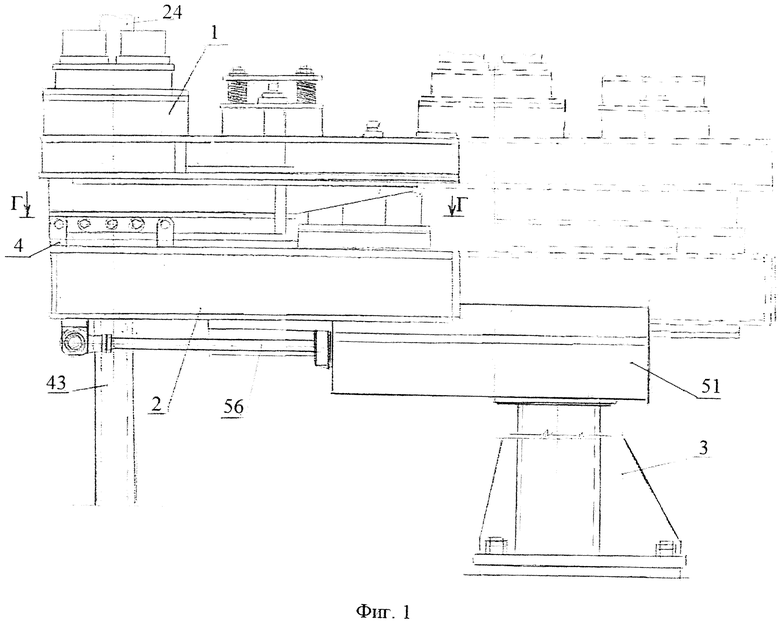
1. Робот буровой универсальный, содержащий верхний модуль, включающий два встречно расположенных приводных блока с гидромоторами, редукторами и парами рабочих роликов для свинчивания верхней трубы с нижней, механизм зажима верхней трубы с гидроцилиндром, а также механизм докрепления (раскрепления) резьбового соединения, приводимый в движение гидроцилиндром, нижний модуль, включающий два встречно расположенных блока зажима нижней трубы с гидроцилиндрами, кроме того, позиционер с гидроцилиндрами, отличающийся тем, что приводные блоки, механизм зажима верхней трубы и механизм докрепления (раскрепления) резьбового соединения установлены на общей плите, выполненной с разъемом для трубы, каждый приводной блок содержит коробку зубчатых передач, включающую центральную шестерню, которая находится в зацеплении с двумя шестернями рабочих роликов, с шестерней редуктора и с шестерней узла докрепления (раскрепления) резьбового соединения, при этом на редукторе установлено не менее двух гидромоторов малой мощности с высокой частой вращения приводного вала, объединенных гидропроводом, а приводной блок снабжен роликовой опорой с обеспечением контакта с механизмом зажима верхней трубы, состоящим из двух узлов со встречным движением друг к другу, при этом каждый узел зажима верхней трубы включает клин и гидроцилиндр, в свою очередь, механизм докрепления (раскрепления) резьбового соединения состоит из двух узлов, каждый из которых включает вертикальный вал, содержащий редуктор и шестерню для обеспечения контакта с шестерней узла докрепления (раскрепления) резьбового соединения, а также гидроцилиндры для докрепления, раскрепления резьбовых соединений и перемещения вертикального вала вниз; кроме этого, блоки зажима нижней трубы заключены в корпус с разъемом для трубы, установленный под общей плитой, при этом каждый блок зажима содержит клин, гидроцилиндр, прижим, соответствующий диаметру нижней трубы, и роликовую опору для обеспечения контакта клина и прижима.
2. Робот по п. 1, отличающийся тем, что позиционер включает закрепленную на внешней опорной плите наружную неподвижную колонну, в которой установлена подвижная по вертикали внутренняя колонна, содержащая в верхней части горизонтальную направляющую, включающую, по меньшей мере, один гидроцилиндр горизонтального перемещения, шарнирно соединенный с корпусом нижнего модуля, который установлен на горизонтальную направляющую с возможностью его перемещения за счет вертикальных роликов, содержащихся на боковых сторонах горизонтальной направляющей.
| 0 |
|
SU155113A1 | |
| КЛЮЧ ДЛЯ СВИНЧИВАНИЯ И РАЗВИНЧИВАНИЯ ЗАМКОВЫХ СОЕДИНЕНИЙ СКВАЖИННЫХ ТРУБ | 2003 |
|
RU2268983C2 |
| Автомат программный универсальный для бурильных труб | 1961 |
|
SU140007A1 |
| АВТОМАТИЧЕСКИЙ СТАЦИОНАРНЫЙ БУРОВОЙ КЛЮЧ | 1998 |
|
RU2143051C1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

