Заявляемые технические решения относятся к области радиолокации и могут быть использованы для определения пеленга на источник непрерывной помехи.
Большие проблемы работе радиолокационных станций (РЛС) создают активные помехи, особенно непрерывные шумовые. В результате их действия происходят нарушение работы РЛС за счет ухудшения соотношения сигнал/шум даже в случае их воздействия в области боковых лепестков.
Существуют различные способы защиты РЛС от воздействия источника непрерывной помехи (ИНП). При очень мощной помехе наиболее эффективным способом защиты РЛС является физическое уничтожение источника непрерывной помехи. Но для этого необходимо знать координаты ИНП или хотя бы пеленг на него. В связи с этим к достоверности пеленгов ИНП предъявляются весьма высокие требования.
Известен способ пространственной обработки сигнала (патент RU №2226704). В этом способе, обеспечивающем подавление приема сигнала в области боковых лепестков диаграммы направленности антенны (ДНА), осуществляют модуляцию веса суммирования энергии двух полей антенны, имеющих амплитудные распределения вида f(x)≠1 и 1-f(x), при этом период модулирующего колебания берут меньшим длительности сигнала, принимают решение об обнаружении сигнала, если глубина модуляции принятого сигнала не превышает порогового значения. А если глубина модуляции превышает пороговое значение, то принимают решение о вне пеленговом положении источника принятого сигнала, т.е. сигнал принят боковым лепестком. Модуляцию распределения поля в раскрыве фазированной антенной решетки осуществляют путем модуляции фазовых сдвигов в фазовращателях или коэффициента усиления (КУ) в приемных модулях антенны.
Решаемой задачей способа является обеспечение обнаружения сигналов и их подавление, принятых на вне пеленговых направлениях. При решении этой задачи учитывают следующие факторы.
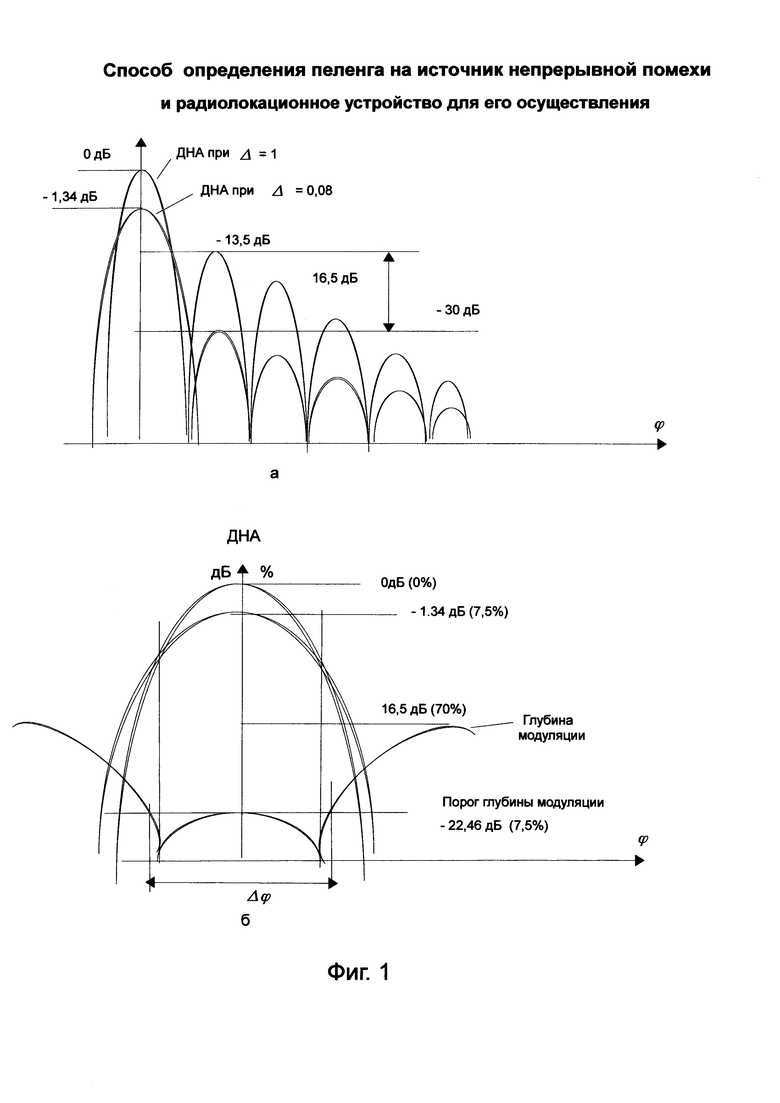
Во-первых, наибольший уровень боковых лепестков (УБЛ) диаграммы направленности антенны при равномерном распределении поля в раскрыве антенны лишь на 13,2 дБ ниже уровня основного, что приводит при большом уровне сигнала к ложному обнаружению целей.
Во-вторых, уменьшение УБЛ возможно при суммировании энергии колебаний, падающей на участки раскрыва антенны, с различным весом, как правило, уменьшающимся от центра к краю раскрыва. В качестве примера будем рассматривать наиболее часто используемую функцию F(x) с пьедесталом Δ [Справочник по радиоэлектронным системам. / Под ред. Б.Х. Кривицкого. Т. 2. - М.: Энергия, 1979, с. 85, табл. 7-2].

При изменении пьедестала Δ от 1 до 0,08 (как это принято для частного случая при весовой обработке по Хэммингу) [Справочник по радиолокации. / Под ред. М. Сколник. - М.: Сов. радио, 1979, т. 3, с. 430-433] наибольший уровень первого бокового лепестка уменьшается на 30 дБ при расширении главного лепестка в 1,5 раза и уменьшении его уровня на 1,34 дБ (там же).
Таким образом, изменяя один параметр Δ в рассматриваемом примере амплитудного распределения вида (I), можно в широких пределах изменять УБЛ при незначительных изменениях уровня главного лепестка ДНА. Вид ДНА для значений Δ=1 и Δ=0,08 приведен на фиг. 1. Если параметр Δ периодически изменять за время длительности рабочего сигнала, то сигнал, принятый боковыми лепестками ДНА, будет иметь глубокую (около 70%) модуляцию, а сигнал, принятый главным лучом, будет слабо модулирован (всего на 7,5%). Это используют в качестве признака принятия сигнала боковым лепестком или главным лучом в известном способе [патент RU №2226704].
Недостаток этого способа состоит в том, что он не определяет пеленг на ИНП. Кроме того, для реализации способа необходимо иметь фазированную антенную решетку с быстродействующими фазовращателями или быстрым (за время импульса) изменением их КУ, что не всегда возможно.
Известен наиболее близкий к заявляемому способ определения пеленга на источник непрерывной помехи, основанный на приеме помехи с различными значениями КУ антенны, получающимися в процессе вращения одноканальной (однолучевой) РЛС по одной из угловых координат, и одновременном измерении уровня излучения ИНП. Значение угловой координаты в момент максимума уровня излучения ИНП считают направлением пеленга на ИНП по измеряемой координате (Теоретические основы радиолокации. / Под ред. В.Е. Дулевича. - М.: Сов. радио, 1964, с. 46).
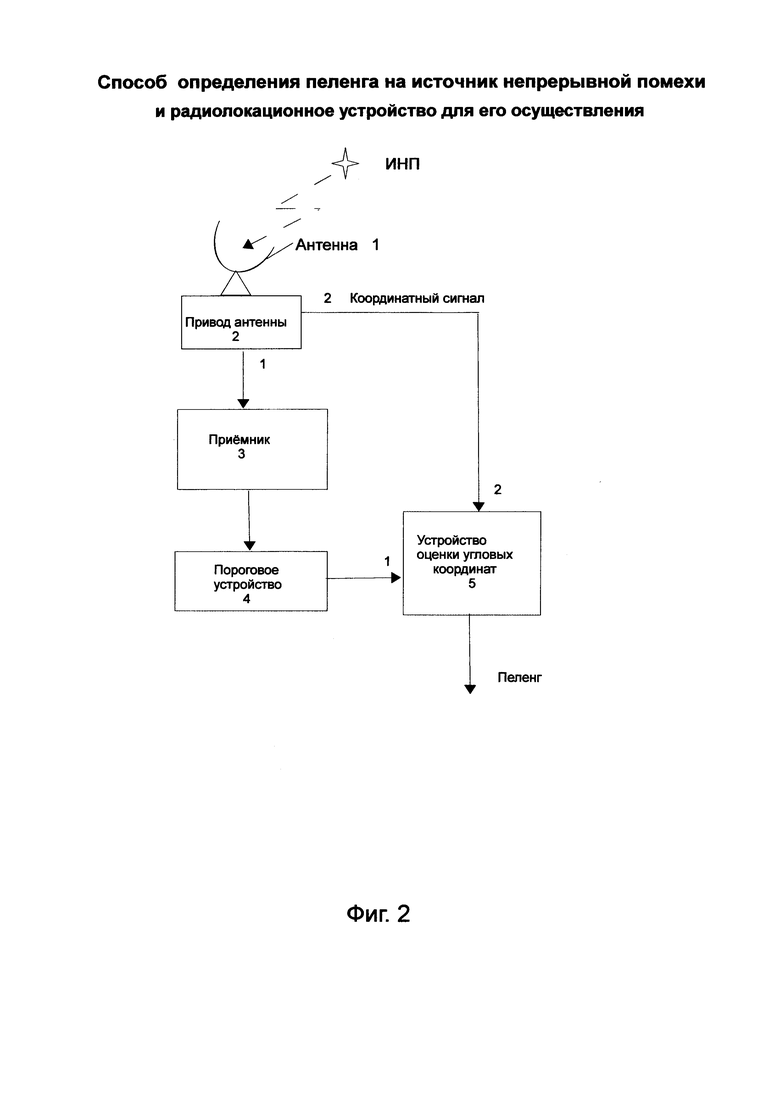
Наиболее близким к заявляемому радиолокационному устройству является радиолокационное устройство, приведенное на (фиг. 2).
Радиолокационное устройство включает антенну 1, привод 2, приемник 3, пороговое устройство 4 и устройство оценки угловых координат 5, антенна 1 закреплена на приводе 2, первый выход антенного привода 2 соединен с входом приемника 3, а второй соединен со вторым входом устройства оценки угловых координат 5, выход приемника 3 соединен с входом порогового устройства 4, а его выход соединен с первым входом устройства оценки угловых координат 5, выход которого является выходом радиолокационного устройства.
Радиолокационное устройство работает следующим образом.
Сигнал ИНП, принятый антенной 1, усиливается в приемнике 3 и поступает на пороговое устройство 4. Сигналы, превысившие порог, поступают на вход 1 устройства оценки угловых координат 5. На вход 2 этого устройства поступает сигнал с координатного выхода 2 привода 2 антенны 1. В устройстве оценки угловых координат 5 происходит сопоставление моментов превышения помехой порога в пороговом устройстве 4 и углового положения привода 2 антенны 1. При этом формируется сигнал пеленга на ИНП.
Недостатком наиболее близких к заявляемому способу и радиолокационному устройству является большое количество ложных пеленгов ИНП. Это объясняется тем, что активные помехи, обнаруженные боковыми лепестками или фоном ДНА и превысившие порог, относят к направлению главного лепестка ДНА и выдают на выход РЛС как пеленги ИНП. Кроме того, если на РЛС воздействует модулированная по уровню помеха, то определить пеленг на постановщика такой помехи очень сложно. (При вращении антенны минимум уровня помехи может совпасть с направлением главного луча, а максимум - с направлением на боковые лепестки, вследствие чего появятся ложные пеленги.) По сформированным таким образом ложным пеленгам ИНП отрабатывают средства защиты от ИНП, например боевые средства уничтожения ИНП, которые при этом нацеливаются на несуществующие цели.
Таким образом, поставленной задачей (техническим результатом) заявляемых способа и радиолокационного устройства является повышение точности определения пеленга на источник непрерывной помехи, в том числе и при нестабильности ее уровня.
Задача решается на основе периодического изменения уровня боковых лепестков ДНА.
Поставленная задача (технический результат) решается тем, что в способе определения пеленга на источник непрерывной помехи (ИНП), основанном на приеме помехи с различными значениями коэффициента усиления антенны, согласно изобретению изменяют КУ в процессе приема путем модуляции распределения поля в раскрыве антенны, измеряют глубину модуляции принятой помехи, принимают решение о пеленге на ИНП, если глубина модуляции отличается от значения, соответствующего пеленгу, не более, чем на порог.
Поставленная задача (технический результат) решается также тем, что порог устанавливают исходя из допустимой погрешности определения пеленга.
Поставленная задача (технический результат) решается также тем, что модуляцию распределения поля в раскрыве фазированной антенной решетки (ФАР) осуществляют путем модуляции фазовых сдвигов в фазовращателях или коэффициентов усиления в приемных модулях.
Поставленная задача (технический результат) решается также тем, что модуляцию распределения поля в раскрыве ФАР осуществляют путем модуляции веса суммирования энергии двух полей, созданных при использовании функций амплитудного распределения поля в раскрыве антенны вида f(x)≠1, 1-f(x).
Поставленная задача (технический результат) решается тем, что в радиолокационное устройство для осуществления способа определения пеленга на ИНП, содержащее антенну с приводом, приемник, пороговое устройство и устройство оценки угловых координат, первый выход антенного привода соединен с входом приемника, а второй соединен со вторым входом устройства оценки угловых координат, выход приемника соединен с входом порогового устройства, выход устройства оценки угловых координат является выходом устройства, согласно изобретению введены устройство определения глубины модуляции, пороговое устройство глубины модуляции, устройство модуляции распределения поля и генератор модулирующей частоты, выход порогового устройства соединен с входом устройства определения глубины модуляции, а его выход соединен с входом порогового устройства глубины модуляции, выход которого соединен с первым входом устройства оценки угловых координат, выход генератора модулирующей частоты соединен с входом устройства модуляции распределения поля, выход которого соединен с входом антенны.
Сущность работы способа и устройства состоит в следующем.
В случае воздействия ИНП периодически с частотой F изменяют уровень боковых лепестков путем модуляции коэффициента усиления или распределения фаз в отдельных элементах приемной антенны, так чтобы происходило изменение параметра Δ [Справочник по радиолокации. / Под ред. М. Сколника, т. 2. - М.: Сов. радио, 1977, с. 188, рис. 40, с. 189, 2-й абз.]. Причем, в отличие от прототипа, изменение КУ происходит не за счет вращения антенны, а за счет изменения распределения поля в ее раскрыве, что приводит к изменению параметра Δ. Как отмечено выше, для рассмотренного примера, при изменении Δ от 1 до 0,08 уровень бокового лепестка уменьшается от минус 13,2 дБ до минус 30 дБ.
Таким образом, периодически изменяя один параметр Δ в амплитудном распределении вида (I), можно периодически в широких пределах изменять УБЛ при незначительных изменениях уровня главного лепестка ДНА и получить глубокую модуляцию принимаемой помехи, если ИНП находится в области боковых лепестков.
Следовательно, в зависимости от направления приема помехи (прием главным лучом ДНА или ее, например, первым боковым лепестком), глубина модуляции принимаемого сигнала помехи будет различной, так как уровень боковых лепестков в рассматриваемом примере (использование функции распределения поля по Хэммингу) изменяется в процессе модуляции от минус 13,2 дБ до минус 30 дБ, что соответствует глубине модуляции 70%, а изменение сигнала помехи, принятой главным лучом, будет лишь минус 1,34 дБ, что соответствует 7,5% глубины модуляции.
Определять глубину модуляции принятой помехи можно при помощи устройства определения глубины модуляции помехи, например, [Цифровой измеритель модуляции, патент RU №2248000]. Полученное при этом измерении значение глубины модуляции М, рассчитанной по формуле,
М=(Uмак-Uмин)/(Uмак+Uмин),
где Uмак - максимальный уровень модулированного сигнала помехи, a Uмин - минимальный его уровень (там же),
сравнивают с заданным порогом глубины модуляции, и если он превышает заданный порог, то считают сигнал помехи принятым боковым лепестком, а если он меньше этого порога, то считают сигнал помехи принятым с пеленгового направления. (Для рассматриваемого случая применения функции Хэмминга порогом служит величина 7,5% - фиг. 1б). Сигналы с выхода привода антенны и сигналы с выхода порогового устройства глубины модуляции подают на второй и первый соответственно входы устройства оценки угловых координат, которое формирует сигнал пеленга. Поскольку помеха является непрерывной, то требований к величине частоты модуляции в предлагаемом способе не предъявляют и требование к быстродействию фазированной антенной решетке отпадают.
Модуляцию распределения поля в раскрыве фазированной антенной решетки осуществляют путем модуляции фазовых сдвигов в фазовращателях или коэффициентов усиления в приемных модулях.
Кроме того, изменение распределения поля в раскрыве ФАР осуществляют путем модуляции веса суммирования энергии двух полей, созданных при использовании функций амплитудного распределения поля в раскрыве антенны вида f(x)≠1, 1-f(x).
Повышение точности определения пеленга в предлагаемом способе объясняется тем, что пеленг определяют по превышению порога глубины модуляции. В случае изменения Δ от 1 до 0,08 его устанавливают на уровне 7,5%. Нулевые значения глубины модуляции в процессе отстройки от нулевого направления на ИНП возникают за счет неизменности уровня главного луча при его отклонении от нулевого направления и снижении его уровня на 1,34 дБ (фиг. 1б). В прототипе ширина главного луча определяется по уровню 0,7, т.е. по уровню 30%. Точность в заявляемом способе может быть еще повышена, если брать Δ равной 0,33 [Справочник по радиолокации. / Под ред. М. Сколника, т. 3. - М.: Сов. радио, 1977, с. 434, табл. 9, п. 4б]. При этом снижение уровня в главном луче составляет 0,5 дБ, расширение луча составляет 1,09, снижение УБЛ составляет 25 дБ. При этом глубина модуляции главного луча составляет 4%. а глубина модуляции боковых лепестков 40%. Соответственно порог глубины модуляции устанавливают уже на уровне 4%.
При воздействии источника модулированной помехи, как было показано ранее, в способе-прототипе определение пеленга становится невозможным, а в предлагаемом способе глубина модуляции не зависит от уровня помехи, поэтому становится возможным определение пеленга и в этом случае.
Таким образом решается поставленная задача и достигается технический результат.
Изобретение иллюстрируется следующими чертежами.
На фиг. 1 показан вид ДНА при разных значениях параметра Δ.
На фиг. 2 приведена схема устройства-прототипа.
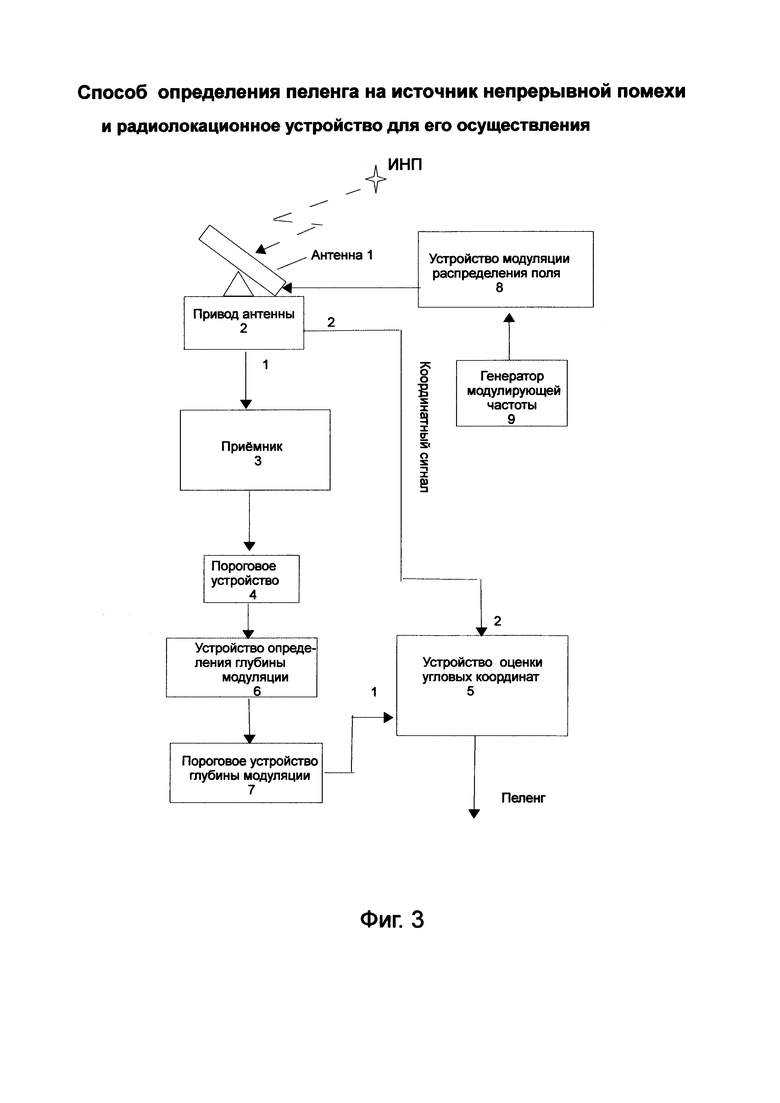
На фиг. 3 приведена схема предлагаемого устройства.
Заявленное радиолокационное устройство для осуществления заявленного способа включает антенну 1 с приводом 2, приемник 3, пороговое устройство 4, устройство оценки угловых координат 5, устройство определения глубины модуляции 6, пороговое устройство глубины модуляции 7, устройство модуляции распределения поля 8 и генератора модулирующей частоты 9, выход 1 привода 2 антенны 1 соединен с входом приемника 3, его выход соединен с входом порогового устройства 4, а его выход соединен с входом устройства определения глубины модуляции 6, выход которого соединен с входом порогового устройства глубины модуляции 7, выход 2 привода 2 соединен с входом 2 устройства оценки угловых координат 5, выход генератора модулирующей частоты 9 соединен с входом устройства модуляции распределения поля 8, выход которого соединен с входом антенны 1, выход устройства оценки угловых координат 5 является выходом устройства.
Рассмотрим более подробно работу заявленного устройства для случая изменения параметра Δ путем модуляции распределения поля в антенне.
Модуляцию распределения поля в антенне 1 осуществляют с помощью генератора модулирующей частоты 9 и устройства модуляции распределения поля 8, это приводит к модуляции принятого сигнала помехи на выходе приемника 3, этот сигнал поступает с выхода приемника на вход порогового устройства 4, с выхода которого он поступает на вход устройства определения глубины модуляции 6, полученный результат подают на вход порогового устройства глубины модуляции 7, сигнал с выхода порогового устройства глубины модуляции 7 поступает на 1 вход устройства оценки угловых координат 5, на его второй вход поступает координатный сигнал с выхода 2 привода 2 антенны 1, при этом в устройстве оценки угловых координат 5 формируется сигнал пеленга, связанный с определенным положением антенны 1.
Таким образом решается поставленная задача и достигается технический результат.
Изобретения относятся к области радиолокации и могут быть использованы для определения пеленга на источник непрерывной помехи. Достигаемый технический результат - повышение точности определения пеленга на источник непрерывной помехи, в том числе и при нестабильности ее уровня. Указанный результат достигается тем, что в способе определения пеленга на источник непрерывной помехи (ИНП), основанном на приеме помехи с различными значениями коэффициента усиления антенны (КУ), изменяют КУ в процессе приема путем модуляции распределения поля в раскрыве антенны, измеряют глубину модуляции принятой помехи, принимают решение о пеленге на ИНП, если глубина модуляции отличается от значения, соответствующего пеленгу, не более, чем на порог, при этом в радиолокационное устройство для осуществления способа определения пеленга на ИНП, содержащее антенну с приводом, приемник, пороговое устройство и устройство оценки угловых координат, первый выход антенного привода соединен с входом приемника, а второй соединен со вторым входом устройства оценки угловых координат, выход приемника соединен с входом порогового устройства, введены устройство определения глубины модуляции, пороговое устройство глубины модуляции, устройство модуляции распределения поля и генератор модулирующей частоты, выход порогового устройства соединен с входом устройства определения глубины модуляции, а его выход соединен с входом порогового устройства глубины модуляции, выход которого соединен с первым входом устройства оценки угловых координат, выход генератора модулирующей частоты соединен с входом устройства модуляции распределения поля, выход которого соединен с входом антенны, выход устройства оценки угловых координат является выходом устройства. 2 н. и 3 з.п. ф-лы, 3 ил.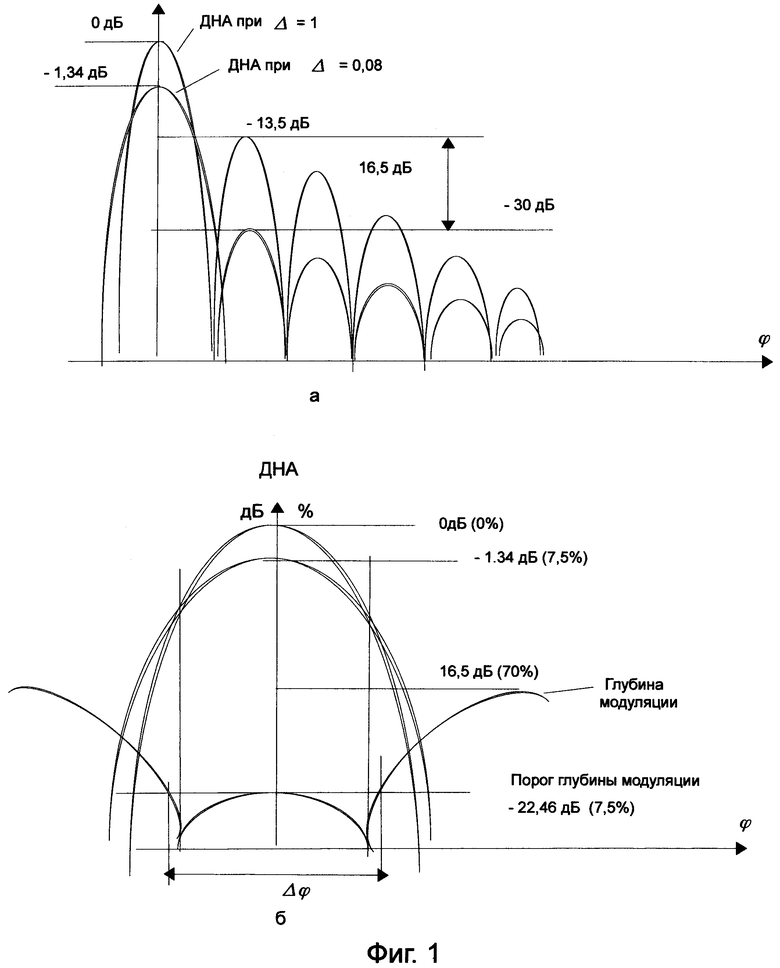
1. Способ определения пеленга на источник непрерывной помехи (ИНП), основанный на приеме помехи с различными значениями коэффициента усиления (КУ) антенны, отличающийся тем, что изменяют КУ в процессе приема путем модуляции распределения поля в раскрыве антенны, измеряют глубину модуляции принимаемой помехи, принимают решение о пеленге на ИНП, если глубина модуляции отличается от значения, соответствующего пеленгу, не более, чем на порог.
2. Способ по п. 1, отличающийся тем, что порог устанавливают исходя из допустимой погрешности определения пеленга.
3. Способ по п. 1, отличающийся тем, что модуляцию распределения поля в раскрыве фазированной антенной решетки (ФАР) осуществляют путем модуляции фазовых сдвигов в фазовращателях или коэффициентов усиления в приемных модулях.
4. Способ по п. 1, отличающийся тем, что модуляцию распределения поля в раскрыве ФАР осуществляют путем модуляции веса при суммировании энергии двух полей, созданных при использовании функций амплитудного распределения поля в раскрыве ФАР вида f(x) и 1-f(x).
5. Радиолокационное устройство для осуществления способа определения пеленга на источник непрерывной помехи, содержащее антенну с приводом, приемник, пороговое устройство и устройство оценки угловых координат, первый выход антенного привода соединен с входом приемника, а второй соединен со вторым входом устройства оценки угловых координат, выход приемника соединен с входом порогового устройства, выход устройства оценки угловых координат является выходом устройства, отличающееся тем, что введены устройство определения глубины модуляции, пороговое устройство глубины модуляции, устройство модуляции распределения поля и генератор модулирующей частоты, выход порогового устройства соединен с входом устройства определения глубины модуляции, а его выход соединен с входом порогового устройства глубины модуляции, выход которого соединен с первым входом устройства оценки угловых координат, выход генератора модулирующей частоты соединен с входом устройства модуляции распределения поля, выход которого соединен с входом антенны.
| Теоретические основы радиолокации | |||
| Под ред | |||
| ДУЛЕВИЧА В.Е | |||
| М.: Советское радио, 1964, с.46 | |||
| СПОСОБ ПРОСТРАНСТВЕННОЙ ОБРАБОТКИ СИГНАЛА (ВАРИАНТЫ) | 2001 |
|
RU2226704C2 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА | 2003 |
|
RU2263926C2 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ В УСЛОВИЯХ МНОГОЛУЧЕВОСТИ | 1997 |
|
RU2141675C1 |
| US 5361073 A, 01.11.1994 | |||
| US 6118402 A, 12.09.2000 | |||
| JP 2009162613 A, 23.07.2009. | |||

