Заявляемые технические решения относятся к области радиолокации и могут быть использованы для определения пеленга постановщика ответной помехи.
Большие проблемы работе радиолокационных станций (РЛС) создают активные помехи, особенно ответные. В результате их действия происходит нарушение работы РЛС за счет имитации обнаружения целей, даже в случае их воздействия в области боковых лепестков, так как структура ответной помехи полностью идентична структуре сигнала, отраженного от реальной цели.
Существуют различные способы защиты РЛС от воздействия источника импульсной, в том числе ответной помехи. При очень мощной помехе наиболее эффективным способом защиты РЛС является физическое уничтожение источника помехи. Но для этого необходимо знать координаты источника помехи или хотя бы пеленг на него. В связи с этим к достоверности пеленга постановщика ответной помехи (ПОП) предъявляются весьма высокие требования.
Известен наиболее близкий к заявляемому способ пеленгации постановщика помехи, основанный на обзоре пространства главным лучом диаграммы направленности антенны (ДНА), осуществляемом в процессе вращения одноканальной (однолучевой) РЛС по одной из угловых координат и одновременном измерении уровня принимаемого излучения помехи. Значение угловой координаты в момент максимума этого уровня считают пеленгом постановщика помехи по измеряемой координате [Теоретические основы радиолокации. Под ред. В.Е. Дулевича. - М.: Сов. радио, 1964, с. 46].
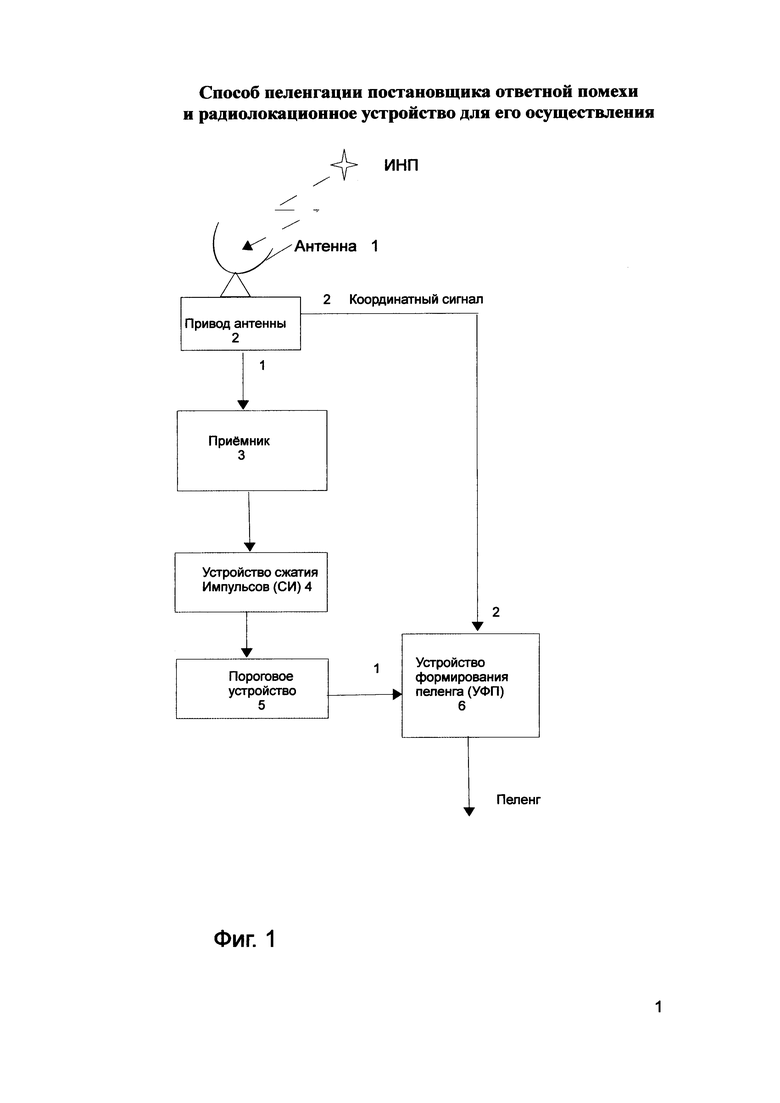
Наиболее близким к заявляемому радиолокационному устройству является радиолокационное устройство, приведенное на фиг. 1.
Радиолокационное устройство включает антенну 1, привод 2, приемник 3, устройство сжатия импульсов (СИ) 4, пороговое устройство 5 и устройство формирования пеленга (УФП) 6, антенна 1 закреплена на приводе 2, первый выход антенного привода 2 соединен с входом приемника 3, а второй соединен со вторым входом УФП 6, выход приемника 3 соединен с входом СИ 4 , выход которого связан с входом порогового устройства 5, а его выход соединен с первым входом УФП 6, выход которого является пеленговым выходом радиолокационного устройства (там же).
Радиолокационное устройство работает следующим образом.
Сигнал ПОП, принятый антенной 1, усиливают в приемнике 3 и далее он поступает на вход СИ 4, а затем на пороговое устройство 5. Сигналы, превысившие порог, поступают на вход 1 УФП 6. На вход 2 этого устройства поступает сигнал с координатного выхода 2 привода 2 антенны 1. В УФП 6 происходит сопоставление момента превышения помехой порога в пороговом устройстве 5 и углового положения привода 2 антенны 1 в этот момент. При этом формируется сигнал пеленга ПОП.
Недостатком наиболее близких к заявляемым способу и радиолокационному устройству является большое количество ложных пеленгов ПОП и невозможность отличить пеленг ПОП и реальной цели, поскольку параметры их сигналов совпадают (ПОП излучает копии сигналов РЛС). Это объясняет то, что активные помехи, обнаруженные боковыми лепестками или фоном ДНА и превысившие порог, относят к направлению главного лепестка ДНА и поэтому считают пеленгами ПОП. Кроме того, если на РЛС воздействует модулированная по уровню помеха, то определить пеленг постановщика такой помехи очень сложно, так как при вращении антенны минимум уровня помехи может совпасть с направлением главного луча, а максимум - с направлением на боковые лепестки, вследствие чего появятся ложные пеленги. По сформированным таким образом ложным пеленгам ПОП отрабатывают средства защиты от ПОП, например боевые средства уничтожения ПОП, которые при этом нацеливаются на несуществующие цели.
Таким образом, поставленной задачей (техническим результатом) заявляемых способа и радиолокационного устройства является определение пеленга ПОП, в том числе и при нестабильности ее уровня.
Задача решается на основе периодического изменения уровня боковых лепестков ДНА.
Поставленная задача (технический результат) решается тем, что в способе пеленгации постановщика ответной помехи, основанном на обзоре пространства главным лучом диаграммы направленности антенны, согласно изобретению при приеме импульсов помехи осуществляют модуляцию фазового или амплитудного распределения поля в раскрыве антенны, считают осматриваемое направление пеленгом ПОП, когда относительный уровень боковых лепестков сжатого импульса помехи не выше порогового значения.
Поставленная задача (технический результат) решается также тем, что считают импульсами помехи сигналы, принятые в зонах, где прием отраженного от цели сигнала невозможен или маловероятен.
Поставленная задача (технический результат) решается также тем, что изменяют параметры зондирующего сигнала путем изменения наклона частотной модуляции на противоположный и импульсы, принятые с прежними параметрами, считают импульсами помехи.
Поставленная задача (технический результат) решается также тем, что модуляцию распределения поля в раскрыве ФАР осуществляют путем модуляции фазовых сдвигов в фазовращателях или коэффициентов усиления в приемных модулях.
Поставленная задача (технический результат) решается также тем, что модуляцию распределения поля в раскрыве ФАР осуществляют путем модуляции веса при суммировании энергии двух полей, созданных при использовании функций амплитудного распределения поля в раскрыве ФАР вида f(x) и 1-f(x).
Поставленная задача (технический результат) решается тем, что в радиолокационное устройство для осуществления способа пеленгации ПОП, содержащее ФАР, привод, приемник, устройство сжатия импульсов, оптимально согласованное с импульсом, имеющим положительный наклон изменения частотной модуляции (СИ «+»), пороговое устройство, устройство формирования пеленга (УФП), выход привода ФАР соединен с входом приемника, выход которого соединен с входом СИ «+», выход УФП является пеленговым выходом РЛС, согласно изобретению введены второе устройство сжатия импульсов, оптимально согласованное с импульсом, имеющим отрицательный наклон изменения частотной модуляции СИ «-», переключатель устройств СИ, устройство синхронного управления переключателем (УСУП), вход которого является входом внешнего сигнала «Включение изменения параметров сигнала», трехотводная линия задержки (ТЛЗ), устройство измерения отношений уровней импульсов (ИО), пороговое устройство отношений (ПУО), устройство селекции импульсов (УСИ), генератор модулирующей частоты (ГМЧ) и устройство модуляции распределения поля в ФАР (УРП), вход СИ «-» соединен с входом СИ «+», выход СИ «+» соединен с первым входом ПУСИ, выход СИ «-» соединен о вторым входом ПУСИ, выход УСУП связан с третьим входом ПУСИ, выход ПУСИ соединен с входом порогового устройства, первый выход которого соединен с входом трехотводной линии задержки (ТЛЗ), выходы А, Б и С которой соединены с 1, 2 и 3 входами устройства ИО соответственно, выход устройства ИО соединен с входом ПУО, выход которого соединен со вторым входом УСИ, первый вход УСИ соединен с выходом Б ТЛЗ, выход УСИ соединен с первым входом УФП, второй вход УФП соединен со вторым выходом привода, второй выход порогового устройства соединен с входом ГМЧ, выход которого соединен с входом УРП, выход УРП соединен с входом антенны.
Техническое решение основано на том [патент RU №2226704], что если огибающая спектра шириной В широкополосного сигнала имеет n>1 выбросов амплитуды или фазы с относительной величиной аn, то после его частотной весовой обработки будет получено три смодулированных импульса: основной сигнал и два его лепестка с относительным уровнем, равным аn/2 и отстоящим по временной оси от него на величину ± n/В [Справочник по радиолокации. Под ред. М. Окопника. Т.3. - М.: Сов. радио, 1979, с. 430, 3-й абз., с. 438, последний абз.]
Таким образом, информация об уровне модуляции амплитуды широкополосного сигнала содержится в относительном уровне боковых лепестков, появляющихся после сжатия сигнала в результате этой модуляции.
Наибольший уровень боковых лепестков (УБЛ) диаграммы направленности антенны при равномерном распределении поля в раскрыве антенны лишь на 13,2 дБ ниже уровня основного, что приводит при большом уровне сигнала к ложному обнаружению целей.
Уменьшение УБЛ возможно при суммировании энергии колебаний, падающей на участки раскрыва антенны, с различным весом, как правило, уменьшающимся от центра к краю раскрыва. В качестве примера будем рассматривать наиболее часто используемую функцию F(x) с пьедесталом Δ [Справочник по радиоэлектронным системам. Под ред. Б.Х. Кривицкого. Т.2. - М.: Энергия, 1979, с. 85, табл.7-2].

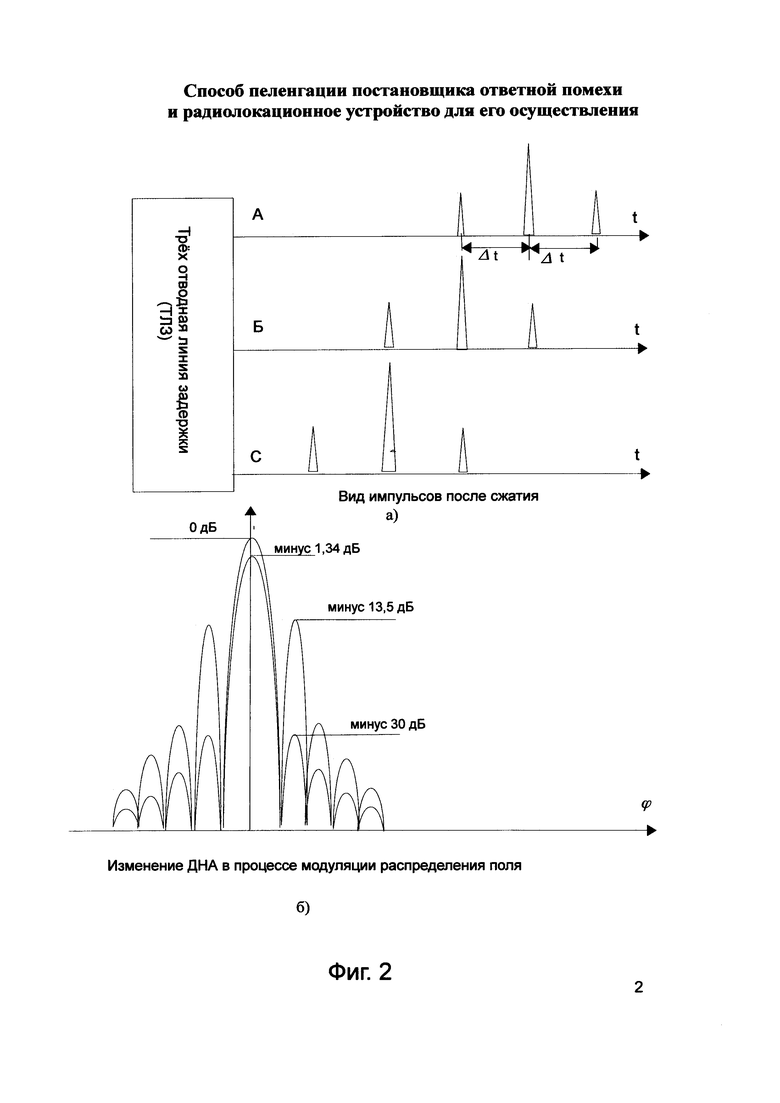
При изменении пьедестала Δ от 1 до 0,08 (как это принято для частного случая при весовой обработке по Хэммингу) [«Справочник по радиолокации», ред. М. Сколник, М., Сов. радио, 1979 г., т.3, с. 430-433] наибольший уровень первого бокового лепестка уменьшается на 30 дБ при расширении главного лепестка в 1,5 раза и уменьшении его уровня на 1,34 дБ.
Таким образом, изменяя один параметр Δ в рассматриваемом примере амплитудного распределения вида (I), можно в широких пределах изменять УБЛ при незначительных изменениях уровня главного лепестка ДНА. Вид ДНА для значений Δ=1 и Δ=0,08 приведен на фиг.2б. Если параметр Δ периодически изменять за время длительности рабочего сигнала, то сигнал, принятый боковыми лепестками ДНА, будет иметь глубокую (около 70%) модуляцию, а сигнал, принятый максимумом главного луча, будет слабо модулирован (всего на 7,5%). Это свойство используют в качестве признака принятия сигнала боковым лепестком или главным лучом.
Распределение поля в раскрыве антенны подвергают модуляции с помощью ГМЧ и УРП так, чтобы Δ в (1) периодически изменялась, например, от 1 до 0,08. Причем период модуляции выбирают в несколько раз меньше длительности зондирующего импульса.
Суть работы способа и устройства состоит в следующем.
В первом случае (п. 2 в формуле) помеху обнаруживают в процессе обзора пространства главным лучом ДНА во время приема сигналов из зон, где прием отраженных от целей сигналов маловероятен (например, на высотах или дальностях на которых данная РЛС не работает) или там, где прием сигналов невозможен (например, за горизонтом), если в этих зонах обнаруживают сигналы, то считают их помехой.
Во втором случае (п. 3 формулы) способ обнаружения ответной помехи состоит в том, что изменяют параметры сигнала (например, изменяют наклона ЧМ модуляции зондирующего импульса) [патент RU №2554092]. При этом синхронно и поочередно подключают соответствующее устройства СИ к пороговому устройству, выделяют импульсы только с прежними параметрами и так распознают сигналы ответной помехи.
Обнаружение помехи служит командой для включения модуляции поля в раскрыве антенны и решения задачи определения пеленга ПОП.
Рассмотрим определение пеленга для второго случая.
Импульс, переизлученный ПОП и принятый антенной, усиливают в приемнике, и он поступает на входы устройств сжатия импульсов СИ «+» и СИ «-». Эти устройства отличаются между собой тем, что одно оптимально согласовано с импульсом, имеющим положительный наклон изменения частотной модуляции (ЧМ), а другое оптимально согласовано с импульсом, имеющим отрицательный наклон ЧМ. Особенность работы устройств СИ состоит в том, что каждое из них подключают к пороговому устройству по внешнему сигналу «Включение изменения параметров сигнала» на время приема только сигналов с прежними параметрами ЧМ. Этот сигнал поступает на вход синхронного управления переключателем (УСУП), который определяет с помощью устройства переключения СИ (ПУСИ), какой из СИ в данный момент должен быть подключен к пороговому устройству, При этом на вход порогового устройства поступают сигналы только с прежними параметрами ЧМ, т.е. сигналы ответной помехи. Сигналы помехи, превысившие порог, используют для включения генератора модулирующей частоты (ГМЧ), который управляет устройством модуляции распределения поля в антенне (УРП).
С этого момента уровень боковых лепестков в сжатом импульсе будет зависеть от того, принят ли импульс с бокового направления или в максимуме главного луча. Импульсы помехи, превысившие порог, поступают также на вход ТЛЗ, а с выходов ТЛЗ А, Б и С (без задержки с выхода А, с задержкой Δt - с выхода Б и с задержкой 2Δt - с выхода С см. фиг. 2а) поступают соответственно на входы 1, 2 и 3 устройства ИО. В этом устройстве происходит вычисление отношений уровней импульсов с соответствующих выходов ТЛЗ в следующем порядке: Б/А, А/Б, Б/С последовательно, с задержкой каждой операции на Δt. Если значение отношений превышает заданный порог в ПУО, то в устройстве селекции импульсов (УСИ) сигналы, превысившие порог ПУО, блокируют прохождение импульсов с выхода Б ТЛЗ, так как превышение порога в ПУО служит признаком принятия импульсов боковым направлением ДНА. Если порог в ПУО не превышен, то это признак принятия импульсов максимумом главного луча, и импульсы с выхода Б ТЛЗ проходят через устройство селекции на первый вход устройства формирования пеленга, на второй вход которого поступает координатный сигнал со второго выхода привода антенны. В УФП происходит сопоставление момента прихода импульса с выхода Б ТЛЗ и угла поворота антенного привода в этот момент в виде координатного сигнала. Так происходит определение пеленга ПОП. Способ обеспечивает распознавание ПОП и повышение точности определения его пеленга.
Повышение точности определения пеленга в предлагаемом способе при воздействии модулированной помехи объясняется тем, что пеленг определяют по превышению порога в устройстве измерения отношений уровней боковых лепестков в сжатом импульсе. Сами импульсы и их лепестки не имеют модуляции, но их отношение будет линейно зависеть от глубины модуляции распределения поля. При воздействии источника модулированной помехи, как было показано ранее в способе - прототипе, определение пеленга становится невозможным, а в предлагаемом способе отношение уровней импульсов в сжатом сигнале определяется только глубиной модуляции поля в раскрыве антенны, а она не зависит от изменений мощности помехи, поэтому становится возможным определение пеленга и в этом случае.
Таким образом, решается поставленная задача и достигается технический результат.
Изобретение иллюстрируется следующими чертежами.
На Фиг. 1 приведена схема устройства-прототипа.
На Фиг. 2 показана временная расстановка импульсов на выходе линии задержки и форма ДНА при разных значениях параметра Δ.
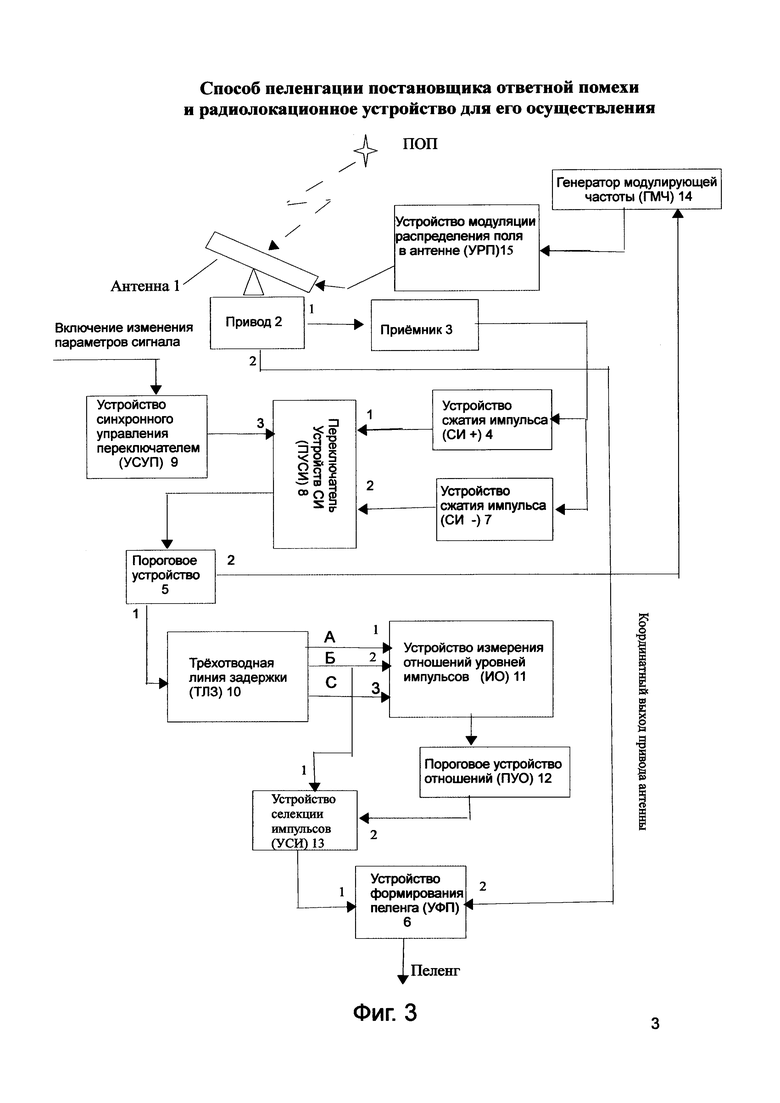
На Фиг. 3 приведена схема предлагаемого устройства.
Заявленное радиолокационное устройство для осуществления заявленного способа включает антенну 1, привод 2, приемник 3, устройства сжатия импульса 4 и 7, пороговое устройство 5, переключатель устройств СИ 8, устройство синхронного управления переключателем 9, трехотводную линию задержки 10, устройство измерения отношений уровней импульсов 11, пороговое устройство отношений 12, устройство селекции импульсов 13, генератор модулирующей частоты 14, устройство модуляции распределения поля в антенне 15 и устройство формирования пеленга 6, первый выход привода 2 антенны 1 соединен с входом приемника 3, выход которого соединен параллельно с входами СИ «+» 4 и СИ «-» 7, выход СИ «+» 4 соединен с первым входом ПУСИ 8, выход СИ «-» 7 соединен со вторым входом ПУСИ 8, на вход УСУП 9 поступает внешний сигнал «Включение изменения параметров сигнала», выход УСУП 9 соединен с третьим входом ПУСИ 8, выход ПУСИ 8 соединен с входом порогового устройства 5, первый выход которого соединен с входом ТЛЗ 10, выходы которой А, Б и С соединены соответственно с 1, 2 и 3 входами устройства ИО 11, выход устройства ИО 11 соединен с входом ПУО 12, выход которого соединен со вторым входом УСИ 13, первый вход УСИ 13 соединен с выходом Б ТЛЗ 10, выход УСИ 13 соединен с первым входом УФП 6, второй вход УФП 6 соединен со вторым выходом привода 2, второй выход порогового устройства 5 соединен с входом ГМЧ 14, выход которого соединен с входом УРП 15, выход УРП 15 соединен с входом антенны 1, выход УФП 6 является пеленговым выходом РЛС.
Рассмотрим более подробно работу заявленного устройства для случая, когда изменяют параметр Δ путем модуляции распределения поля в раскрыве антенны, а обнаружение ответной помехи осуществляют путем изменения параметров зондирующего сигнала.
После обнаружения помехи (помехой считают импульсы, принятые с прежними значениями параметров зондирующего сигнала) распределение поля в раскрыве антенны подвергают модуляции с помощью ГМЧ 14 и УРП 15 так, чтобы Δ в (1) периодически изменялась, например от 1 до 0,08. Причем период модуляции выбирают в несколько раз меньше длительности зондирующего сигнала. Импульс, переизлученный ПОП и принятый антенной 1, усиливают в приемнике 2 и подают на входы устройств сжатия импульсов СИ «+» 4 и СИ «-» 7. Эти устройства отличаются между собой тем, что одно оптимально согласовано с импульсом, имеющим положительный наклон изменения частотной модуляции, а другое оптимально согласовано с импульсом, имеющим отрицательный наклон ЧМ. Особенность работы устройств СИ «+» 4 и СИ «-» 7 состоит в том, что каждое из них подключают по внешнему сигналу «Включение изменения параметров сигнала» с помощью УСУП 9 и ПУСИ 8 к пороговому устройству 5 на время приема сигналов с прежними параметрами ЧМ. Сигнал «Включение изменения параметров сигнала» поступает на вход устройства синхронного управления переключателем 9, который определяет, какой из СИ в данный момент должен быть подключен к пороговому устройству 5 с помощью устройства переключения СИ 8. Кроме того, импульсы помехи, превысившие порог 5, используют для включения генератора модулирующей частоты 14, который управляет устройством модуляции распределения поля в антенне 15.
С этого момента уровень боковых лепестков в сжатом импульсе будет зависеть от того, принят ли импульс боковыми лепестками антенны или в максимуме главного луча. Одновременно импульсы, превысившие порог 5, поступают на вход ТЛЗ 10, а с выходов ТЛЗ 10 А, Б и С (без задержки с выхода А, с задержкой Δt - с выхода Б и с задержкой 2Δt - с выхода С см. фиг. 2а) поступают соответственно на входы 1, 2 и 3 устройства ИО 11. В этом устройстве происходит вычисление отношений уровней импульсов с соответствующих выходов ТЛЗ 10 в следующем порядке: Б/А, А/Б, Б/С последовательно, с задержкой каждой операции на Δt. Если значение отношений превышает заданный порог в ПУО 12, то в устройстве селекции импульсов 13 сигналы, превысившие порог в ПУО 12, блокируют прохождение импульсов с выхода Б ТЛЗ 10, так как превышение порога в ПУО 12 служит признаком принятия импульсов боковыми лепестками. Если порог в ПУО 12 не превышен, то это признак принятия импульсов максимумом главного луча, и он проходит через устройство селекции импульсов 13 на первый вход устройства формирования пеленга 6, на второй вход которого поступает координатный сигнал со второго выхода привода 2 антенны 1. В УФП 6 происходит сопоставление момента прихода импульса по линии Б и угла поворота в этот момент антенного привода в виде координатного сигнала. Так происходит определение пеленга ПОП.
Таким образом, решается поставленная задача и достигается технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения пеленга на источник непрерывной помехи и радиолокационное устройство для его осуществления | 2016 |
|
RU2608360C1 |
| СПОСОБ ПОДАВЛЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ, ИМИТИРУЮЩИХ ЦЕЛЬ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2578505C1 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1982 |
|
SU1840048A2 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1985 |
|
SU1840389A1 |
| Способ компенсации помех и комплекс для его осуществления | 2018 |
|
RU2703999C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ В ОБЛАСТИ БОКОВЫХ ЛЕПЕСТКОВ АНТЕННЫ РАДИОЛОКАТОРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
SU1840239A1 |
| СПОСОБ ЗАЩИТЫ ОТ ИМПУЛЬСНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2014 |
|
RU2556705C1 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1984 |
|
SU1840388A2 |
| АДАПТИВНАЯ ЭНЕРГЕТИКО-КОРРЕЛЯЦИОННАЯ СИСТЕМА ПОДАВЛЕНИЯ БОКОВЫХ ЛЕПЕСТКОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 1996 |
|
RU2116000C1 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1987 |
|
RU2226700C2 |
Изобретение относится к области радиолокации и может быть использовано для определения пеленга постановщика ответной помехи. Достигаемый технический результат - повышение точности определения пеленга постановщика ответной помехи (ПОП), в том числе и при нестабильности ее уровня. Указанный результат достигается тем, что в способе пеленгации постановщика ответной помехи, основанном на излучении зондирующего сигнала и обзоре пространства главным лучом диаграммы направленности фазированной антенной решетки (ФАР), при приеме импульсов помехи осуществляют модуляцию фазового или амплитудного распределения поля в раскрыве ФАР, считают осматриваемое направление пеленгом ПОП, когда относительный уровень боковых лепестков сжатого импульса помехи не выше порогового значения. Указанный технический результат достигается также тем, что считают импульсами помехи сигналы, принятые в зонах, где прием отраженного от цели сигнала невозможен или маловероятен, а также тем, что изменяют параметры зондирующего сигнала путем изменения наклона частотной модуляции на противоположный и импульсы, принятые с прежними параметрами, считают импульсами помехи, а также тем, что порог устанавливают исходя из допустимой погрешности определения пеленга. При этом устройство для осуществления способа содержит ФАР, привод, приемник, устройство сжатия импульсов, оптимально согласованное с импульсом, имеющим положительный наклон изменения частотной модуляции (СИ «+»), пороговое устройство, устройство формирования пеленга (УФП), второе устройство сжатия импульсов, оптимально согласованное с импульсом, имеющим отрицательный наклон изменения частотной модуляции СИ «-», переключатель устройств СИ, устройство синхронного управления переключателем (УСУП), вход которого является входом внешнего сигнала «Включение изменения параметров сигнала», трехотводную линию задержки (ТЛЗ), устройство измерения отношений уровней импульсов (ИО), пороговое устройство отношений (ПУО), устройство селекции импульсов (УСИ), генератор модулирующей частоты (ГМЧ) и устройство модуляции распределения поля в ФАР (УРП), определенным образом соединенные между собой. 2 н. и 5 з.п. ф-лы, 3 ил.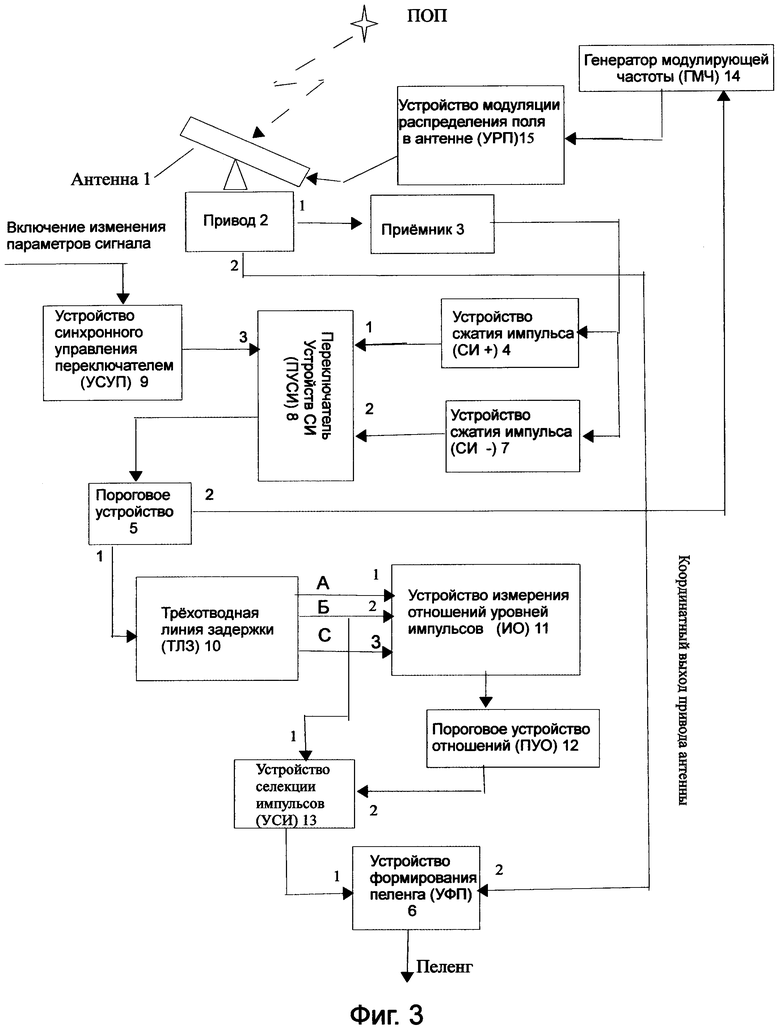
1. Способ пеленгации постановщика ответной помехи (ПОП), основанный на излучении зондирующего сигнала и обзоре пространства главным лучом диаграммы направленности фазированной антенной решетки (ФАР), отличающийся тем, что при приеме импульсов помехи осуществляют модуляцию фазового или амплитудного распределения поля в раскрыве ФАР, считают осматриваемое направление пеленгом ПОП, когда относительный уровень боковых лепестков сжатого импульса помехи не выше порогового значения.
2. Способ по п. 1, отличающийся тем, что считают импульсами помехи сигналы, принятые в зонах, где прием отраженного сигнала от цели невозможен или маловероятен.
3. Способ по п. 1, отличающийся тем, что изменяют параметры зондирующего сигнала путем изменения наклона частотной модуляции на противоположный и импульсы, принятые с прежними параметрами, считают импульсами помехи.
4. Способ по п. 1, отличающийся тем, что пороговое значение устанавливают исходя из допустимой погрешности определения пеленга.
5. Способ по п. 1, отличающийся тем, что модуляцию распределения поля в раскрыве фазированной антенной решетки (ФАР) осуществляют путем модуляции фазовых сдвигов в фазовращателях или коэффициентов усиления в приемных модулях.
6. Способ по п. 1, отличающийся тем, что модуляцию распределения поля в раскрыве ФАР осуществляют путем модуляции веса при суммировании энергии двух полей, созданных при использовании функций амплитудного распределения поля в раскрыве ФАР вида f(x) и 1-f(x).
7. Радиолокационное устройство для осуществления способа пеленгации постановщика ответной помехи, содержащее фазированную антенную решетку (ФАР), привод, приемник, устройство сжатия импульсов, оптимально согласованное с импульсом, имеющим положительный наклон изменения частотной модуляции (СИ «+»), пороговое устройство, устройство формирования пеленга (УФП), выход привода ФАР соединен с входом приемника, выход приемника соединен с входом СИ «+», выход УФП является пеленговым выходом радиолокационной станции, отличающееся тем, что введены второе устройство сжатия импульсов, оптимально согласованное с импульсом, имеющим отрицательный наклон изменения частотной модуляции СИ «-», переключатель устройств СИ (ПУСИ), устройство синхронного управления переключателем (УСУП), вход которого является входом внешнего сигнала «Включение изменения параметров сигнала», трехотводную линию задержки (ТЛЗ), устройство измерения отношений уровней импульсов (ИО), пороговое устройство отношений (ПУО), устройство селекции импульсов (УСИ), генератор модулирующей частоты (ГМЧ) и устройство модуляции распределения поля в ФАР (УРП), вход СИ «-» соединен с входом СИ «+», выход СИ «+» соединен с первым входом ПУСИ, выход СИ «-» соединен со вторым входом ПУСИ, выход УСУП соединен с третьим входом ПУСИ, выход ПУСИ соединен с входом порогового устройства, первый выход которого соединен с входом трехотводной линии задержки, выходы А, Б и С которой соединены с 1, 2 и 3 входами устройства ИО соответственно, выход устройства ИО соединен с входом ПУО, выход которого соединен со вторым входом УСИ, первый вход УСИ соединен с выходом Б ТЛЗ, выход УСИ соединен с первым входом УФП, второй вход УФП соединен со вторым выходом привода, второй выход порогового устройства соединен с входом ГМЧ, выход которого соединен с входом УРП, выход УРП соединен с входом ФАР.
| Теоретические оснвы радиолокации./ Под ред | |||
| ДУЛЕВИЧА В.Е | |||
| М.: Советское радио, 1964, с.46 | |||
| АМПЛИТУДНЫЙ ОДНОКАНАЛЬНЫЙ МНОГОЧАСТОТНЫЙ ПЕЛЕНГАТОР ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2005 |
|
RU2305850C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ-ПОСТАНОВЩИКА ОТВЕТНОЙ ПОМЕХИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ, ОБЛУЧАЕМЫХ ПОСТАНОВЩИКОМ ОТВЕТНОЙ ПОМЕХИ | 2012 |
|
RU2531803C2 |
| Магнитоэлектрический измерительный прибор | 1956 |
|
SU107369A1 |
| JP 2060245 A, 28.02.1990 | |||
| US 4433333 A, 21.02.1984 | |||
| US 8922419 B2, 30.12.2014. | |||

