Изобретение относится к способу с признаками согласно родовому понятию пункта 1 формулы изобретения.
Такой способ известен из международной заявки на патент WO 2011/027166 A1. В этом ранее известном способе для определения местоположения рельсового транспортного средства вдоль рельсового пути предусмотрен волновод, который проложен вдоль рельсового пути. В волновод последовательно во времени вводятся электромагнитные импульсы. Для каждого переданного импульса принимается и оценивается по меньшей мере один образец обратного рассеяния, генерируемый посредством индуцированного транспортным средством обратного рассеяния электромагнитного импульса. Посредством оценки образца обратного рассеяния определяется местонахождение рельсового транспортного средства на рельсовом пути.
В основе изобретения лежит задача создать способ для определения местоположения транспортного средства, который обеспечивает возможность надежного и особенно точного определения местоположения.
Эта задача в соответствии с изобретением решается способом с признаками согласно пункту 1 формулы изобретения. Предпочтительные варианты осуществления соответствующего изобретению способа раскрыты в зависимых пунктах формулы изобретения.
Согласно этому в соответствии с изобретением предусмотрено, что волновод вдоль пути следования имеет по меньшей мере один участок определения местоположения, в котором чувствительность к вибрации волновода и/или вибрация, воздействующая на волновод, больше или меньше, чем вне участка определения местоположения, амплитуда принимаемого образца обратного рассеяния оценивается и сигнал местоположения генерируется, когда амплитуда принимаемого образца обратного рассеяния увеличивается или уменьшается с течением времени.
Существенным преимуществом способа по настоящему изобретению является то, что в нем возможно определение местоположения транспортного средства, которое не зависит от временного интервала между передачей электромагнитных импульсов и приемом образца обратного рассеяния. В соответствующем изобретению способе можно выполнять определение местоположения транспортного средства независимо от этого временного интервала. Это возможно потому, что по меньшей мере один участок определения местоположения изменяет образец обратного рассеяния как таковой, а именно, по амплитуде, так что на основе изменения образца обратного рассеяния как такового, а именно его амплитудного изменения, возможно определение местоположения транспортного средства на пути следования. Таким образом, даже если, например, из-за задержек в рамках генерации импульсов и/или в рамках оценки образцов обратного рассеяния возникают временные колебания, они не влияют на точность определения местоположения транспортного средства, так как транспортное средство в области участка(ов) определения местоположения всегда будет генерировать образец обратного рассеяния, амплитудная характеристика которого указывает участок определения местоположения и является независимой от того, какой временной интервал прошел между вводом импульсов в волноводе и приемом или оценкой соответствующего образца обратного рассеяния.
Чтобы обеспечить возможность определения местоположения транспортного средства в различных местах пути следования или в области различных мест волновода, является предпочтительным, если путь следования оснащен множеством участков определения местоположения, которые предусмотрены в волноводе на расстоянии друг от друга.
В соответствии с особенно предпочтительным вариантом осуществления способа предусмотрено, что определяется местоположение движущегося на рельсовом пути рельсового транспортного средства, причем воздействующая на волновод вибрация на участке определения местоположения посредством локальной механической связи между волноводом и рельсовым путем повышается или посредством устройства уменьшения вибрации уменьшается.
Альтернативно или дополнительно, чувствительность к вибрации волновода на участке определения местоположения может быть увеличена или уменьшена за счет того, что на участке определения местоположения используется материал волновода с более высокой или более низкой чувствительностью к вибрации, чем на обоих участках волновода, находящихся перед или после соответствующего участка определения местоположения.
Предпочтительно, дополнительно генерируется вспомогательный сигнал определения местоположения, указывающий местоположение транспортного средства.
Такой вспомогательный сигнал определения местоположения может, например, быть образован тем, что отражения на введенных в волновод и известных по их положению местах помех измеряются и вспомогательный сигнал определения местоположения генерируется, когда прием образца обратного рассеяния совпадает по времени с отражением из-за таких мест помех. Расположение мест помех и/или соответствующая длина мест помех предпочтительно образует кодирование местоположения.
В качестве альтернативы, например, такой вспомогательный сигнал определения местоположения образуется тем, что временной интервал между вводом электромагнитных импульсов в волновод и обнаружением соответствующего образца обратного рассеяния измеряется и на основе временного интервала генерируется сигнал дальности, указывающий местоположение транспортного средства, в качестве вспомогательного сигнала определения местоположения.
Предпочтительно, сигнал определения местоположения и вспомогательный сигнал определения местоположения проверяются на достоверность.
Такая проверка достоверности особенно просто и тем самым предпочтительно может выполняться таким образом, что в случае формирования сигнала определения местоположения положение транспортного средства, указываемое посредством вспомогательного сигнала определения местоположения (например, сигнала дальности), сравнивается с известным положением участка определения местоположения.
Предпочтительным образом генерируется сигнал ошибки, когда расстояние между положением транспортного средства, указываемым вспомогательным сигналом определения местоположения, и известным положением участка определения местоположения превышает заданный порог.
Кроме того, считается предпочтительным, когда волновод вдоль пути следования содержит множество участков определения местоположения, в которых чувствительность к вибрации волновода и/или вибрация, воздействующая на волновод, больше или меньше, чем на обоих участках волновода, находящихся перед или после соответствующего участка определения местоположения, и генерируется соответствующий сигнал определения местоположения, когда амплитуда принятых образцов обратного рассеяния с течением времени увеличивается или уменьшается.
Предпочтительным образом, при въезде транспортного средства на путь следования после первой генерации сигнала определения местоположения отсчитывают появление следующих сигналов определения местоположения и с помощью соответствующего показания счетчика формируют информацию определения местоположения.
Кроме того, в качестве предпочтительного рассматривается, если расположение участков определения местоположения и/или соответствующая длина участков определения местоположения образует кодирование местоположения и при оценке временной характеристики образца обратного рассеяния распознают кодирование местоположения и осуществляют различение участков определения местоположения на основе кодирования местоположения.
Изобретение также относится к устройству определения местоположения для определения местоположения транспортного средства вдоль пути следования с проложенным вдоль пути следования волноводом, устройством генерации импульсов для генерации и ввода последовательных во времени электромагнитных импульсов в волновод, устройством обнаружения для обнаружения электромагнитных образцов обратного рассеяния, сгенерированных за счет индуцированного транспортным средством обратного рассеяния, и устройством оценки для оценки образца обратного рассеяния.
Относительно такого устройства определения местоположения в соответствии с изобретением предусмотрено, что волновод вдоль пути следования имеет по меньшей мере один участок определения местоположения, на котором чувствительность к вибрации волновода и/или вибрация, воздействующая на волновод, больше или меньше, чем на обоих участках волновода, находящихся перед или после соответствующего участка определения местоположения, и устройство оценки выполнено таким образом, что оно выполняет определение местоположения транспортного средства по меньшей мере также с учетом амплитуды образца обратного рассеяния.
Что касается преимуществ соответствующего изобретению устройства определения местоположения, можно сослаться на вышеуказанные пояснения в связи с соответствующим изобретению способом, так как преимущества соответствующего изобретению способа по существу соответствуют таковым для соответствующего изобретению устройства.
Предпочтительно, волновод проложен рядом с рельсовым путем и воздействующая на волновод вибрация на участке определения местоположения предпочтительно посредством локальной механической связи между волноводом и рельсовым путем увеличивается или посредством устройства снижения вибрации снижается.
Дополнительно или альтернативно, волновод может иметь на участке определения местоположения материал волновода, имеющий более высокую или более низкую чувствительность к вибрации, чем на обоих участках волновода, находящихся перед или после соответствующего участка определения местоположения.
Особенно предпочтительно, волновод вдоль пути следования имеет множество участков определения местоположения, на которых чувствительность к вибрации волновода и/или вибрация, воздействующая на волновод, больше или меньше, чем на обоих участках волновода, находящихся перед или после соответствующего участка определения местоположения.
Расположение участков определения местоположения и/или соответствующая длина участков определения местоположения предпочтительно образует кодирование местоположения.
Изобретение поясняется далее более подробно на примерах выполнения, при этом на чертежах показано следующее:
Фиг. 1 - пример выполнения соответствующего изобретению устройства определения местоположения для определения местоположения транспортного средства вдоль пути следования,
Фиг. 2-4 - пример образца обратного рассеяния, который создается транспортным средством на пути следования согласно фиг. 1,
Фиг. 5 - пример выполнения соответствующего изобретению устройства определения местоположения, в котором участки определения местоположения образуют кодирование местоположения,
Фиг. 6 - другой пример выполнения соответствующего изобретению устройства определения местоположения,
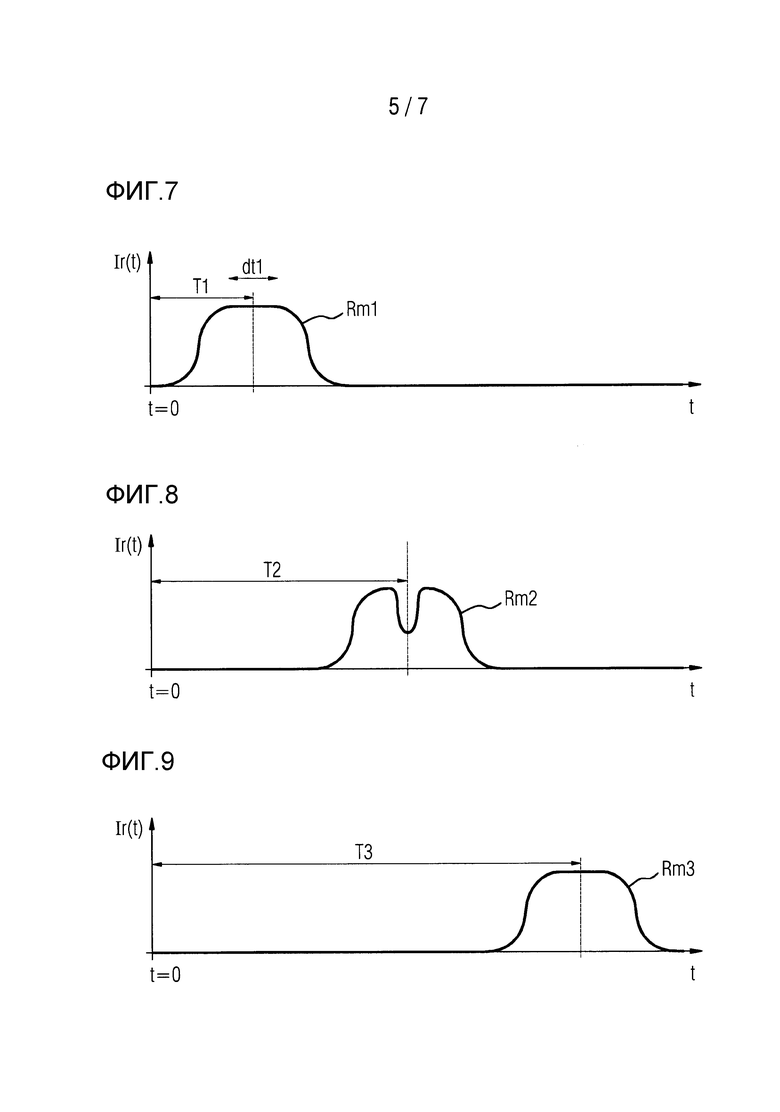
Фиг. 7-9 - пример образца обратного рассеяния, который создается транспортным средством на пути следования согласно фиг. 6,
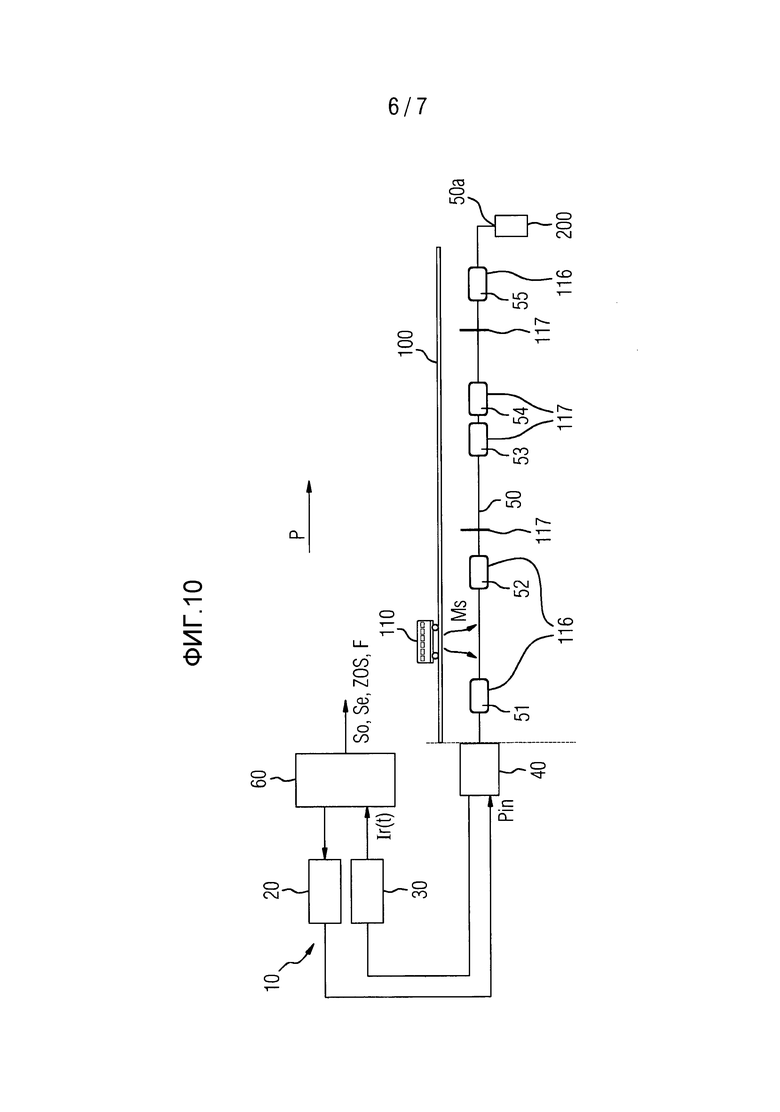
Фиг. 10 - другой пример выполнения для соответствующего изобретению устройства определения местоположения и
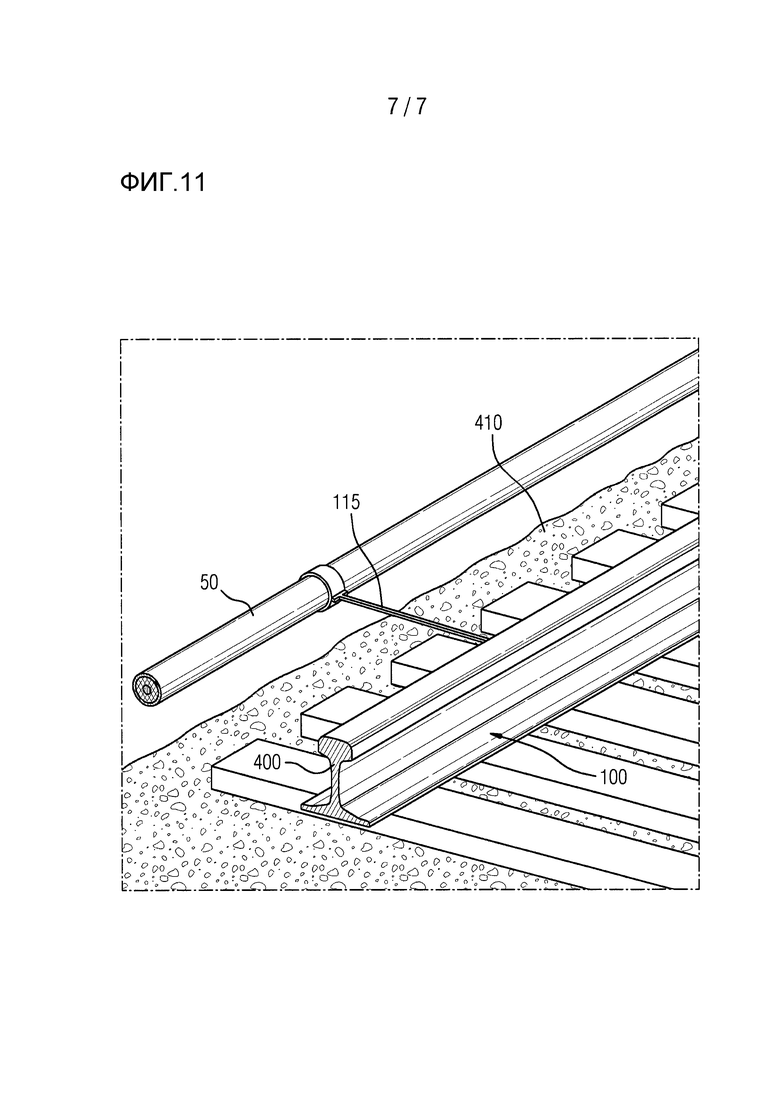
Фиг. 11 - более детальный пример выполнения соединительного элемента.
На чертежах ради наглядности для одинаковых или сопоставимых компонентов всегда применяются те же ссылочные позиции.
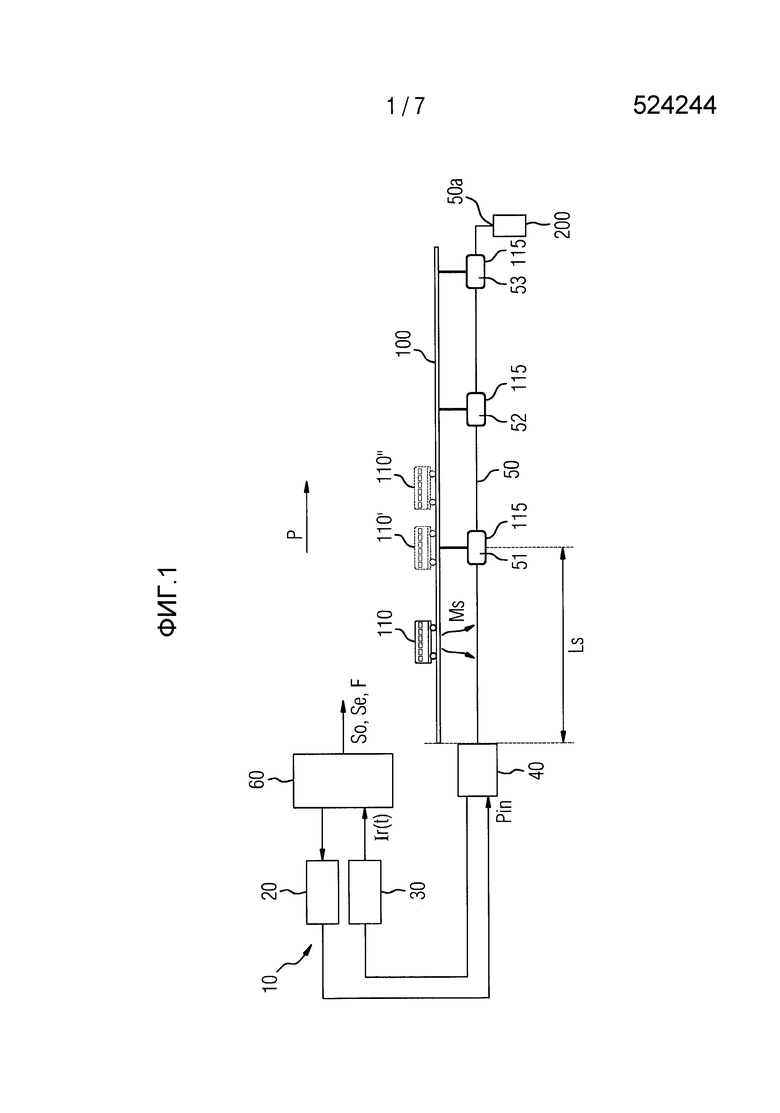
Фиг. 1 показывает устройство 10 определения местоположения, которое содержит устройство 20 генерации импульсов, устройство 30 обнаружения, оптическое устройство 40 связи, волновод 50, например, в форме оптического световода и устройство 60 оценки.
Устройство 20 генерации импульсов предпочтительно имеет не показанный далее лазер, который позволяет регулярно, например с постоянно заданной частотой повторения импульсов, генерировать короткие электромагнитные, в частности, оптические импульсы и вводить их через устройство 40 связи в волновод 50. Устройство 20 генерации импульсов предпочтительно управляется устройством 60 оценки, так что устройству 60 оценки по меньшей мере приближенно известны моменты времени генерации импульсов.
Устройство 30 обнаружения содержит, например, фотодетектор, который позволяет обнаруживать электромагнитное излучение. Устройство 30 обнаружения передает свои сигналы измерения в устройство 60 оценки, которое оценивает их.
На фиг. 1 можно видеть, что волновод 50 расположен вдоль рельсового пути 100. На рельсовом пути 100 рельсовое транспортное средство 110 движется вдоль направления стрелки P слева направо. В представлении в соответствии с фиг. 1 движение рельсового транспортного средства 110 в направлении, указанном стрелкой P, символизируется двумя другими позициями (см. позиции 110' и 110'' рельсового транспортного средства).
Фиг. 1 показывает, что волновод 50 оснащен участками 51, 52 и 53 определения местоположения, на которых воздействующая на волновод 50 вибрация из-за проходящего рельсового транспортного средства больше, чем вне участков 51, 52 и 53 определения местоположения. Увеличение вибрации на участках 51-53 определения местоположения основано, например, на том, что волновод 50 механически соединен на этих участках с рельсами рельсового пути 100 с помощью одного или нескольких соединительных элементов 115 в форме стержней, трубок, шипов или тому подобного (см. фиг. 11). Дополнительно или альтернативно, на участках 51-53 определения местоположения также может быть использован материал волновода, который сам по себе имеет более высокую чувствительность к вибрации, чем материал волновода вне участков 51, 52 и 53 определения местоположения.
Устройство 10 определения местоположения согласно фиг. 1 для определения местоположения рельсового транспортного средства 110 работает, например, следующим образом:
Устройство 60 оценки управляет устройством 20 генерации импульсов таким образом, что оно последовательные во времени электромагнитные импульсы через устройство 40 связи вводит в волновод 50. Сгенерированные электромагнитные импульсы проходят в направлении стрелки Р на фиг. 1 слева направо и предпочтительно на конце 50а волновода поглощаются устройством 200 поглощения.
За счет рельсового транспортного средства 110, проходящего по рельсовой линии 100, волновод 50 локально сотрясается или приводится в колебания; это показано на фиг. 1 стрелками, обозначенными ссылочной позицией Ms. Эти колебания или сотрясения волновода 50 локально в области, в которой как раз находится рельсовое транспортное средство 110, приводят к обратному рассеянию электромагнитного излучения. Обратно рассеянное излучение демонстрирует образец (шаблон) обратного рассеяния, который является характерным для вибрации, которая вызвана рельсовым транспортным средством 110, и вводится в волновод 50.
Обратно рассеянное излучение распространяется противоположно направлению Р движения рельсового транспортного средства в направлении устройства 40 связи и в направлении устройства 30 обнаружения, где оно обнаруживается устройством 30 обнаружения. Устройство 30 обнаружения выполнено таким образом, что оно измеряет интенсивность обратно рассеянного излучения и передает соответствующий сигнал измерения на устройство 60 оценки. Интенсивность обратно рассеянного излучения обозначена на фиг. 1 ссылочной позицией Ir(t).
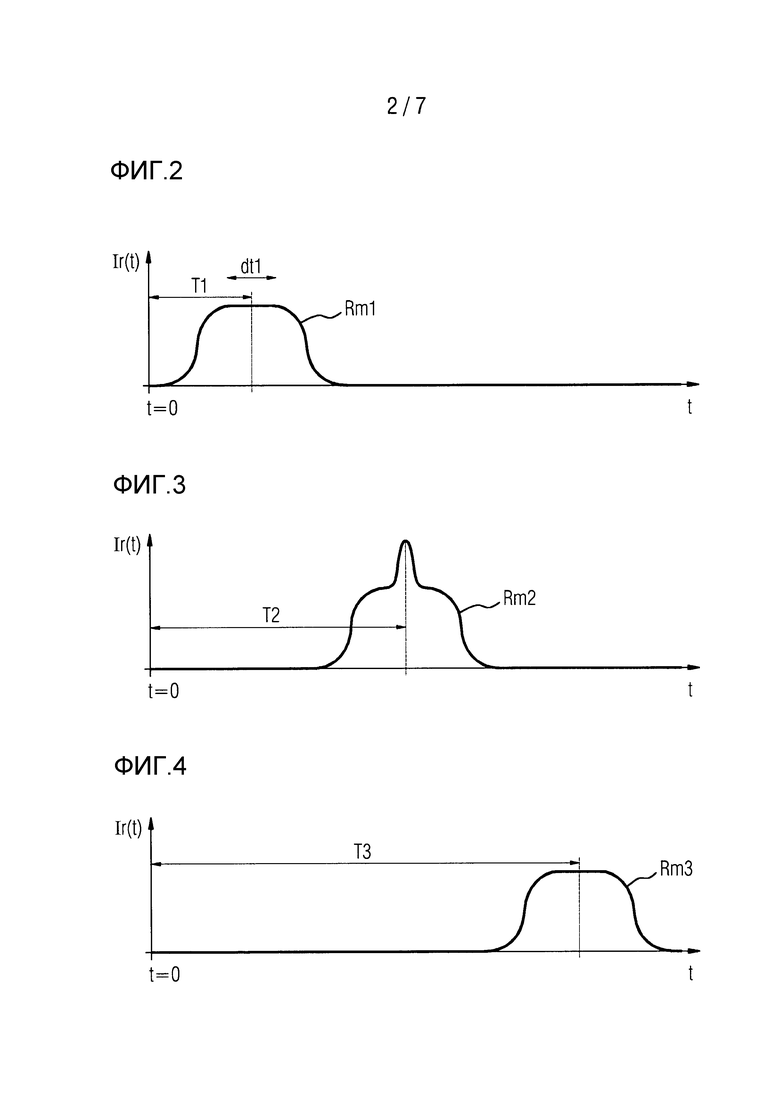
Устройство 60 оценки будет оценивать обратно рассеянное излучение Ir(t) и содержащийся в нем образец обратного рассеяния. Если амплитуда принимаемого образца обратного рассеяния увеличивается с течением времени, то она будет указывать на прохождение одного из участков 51-53 определения местоположения и генерировать сигнал So местоположения. Это будет описано более подробно со ссылкой на фиг 2-4.
На фиг. 2 представлен для примера образец Rm1 обратного рассеяния, который поступает в устройство 60 оценки, если к моменту времени t = 0 электромагнитный импульс от устройства 20 генерации импульсов был введен в волновод 50. Длина принятого образца Rm1 обратного рассеяния на фиг. 2 обозначена ссылочной позицией dt1.
Образец Rm1 обратного рассеяния относится к положению рельсового транспортного средства согласно фиг. 1, как обозначено там сплошными линиями и ссылочной позицией 110.
Если рельсовое транспортное средство 110 движется в направлении, указанном стрелкой Р согласно фиг. 1, дальше и достигает положения, обозначенного ссылочной позицией 110', то оно приводит участок 51 определения местоположения волновода 50 в механические колебания. Однако в области участка 51 определения местоположения вибрация, действующая на волновод 50, и/или его чувствительность к вибрации намного больше, чем за пределами участков 51-53 определения местоположения, так что это приводит к увеличению амплитуды образца обратного рассеяния. Это показано на фиг. 3.
Если рельсовое транспортное средство 110 покидает участок 51 определения местоположения и попадает в область между обоими участками 51 и 52 определения местоположения согласно фиг. 1 (см. обозначенное ссылочной позицией 110'' положение транспортного средства на фиг. 1), то амплитуда образца обратного рассеяния вновь уменьшается до нормального уровня. В соответствии с этим амплитуда образца обратного рассеяния Rm3 (см. фиг. 4) вновь соответствует первоначальной амплитуде образца обратного рассеяния Rm1 согласно фиг. 2.
Таким образом, устройство 60 оценки на основе амплитуд образцов обратного рассеяния Rm1, Rm2 и Rm3 может определить местоположение рельсового транспортного средства 110 на рельсовом пути 100, потому что пространственное положение участков 51-53 определения местоположения вдоль рельсового пути 100 известно.
Путем подсчета сгенерированных на выходе устройства 60 оценки сигналов So местоположения можно, таким образом, отслеживать движение рельсового транспортного средства.
Расположение участков определения местоположения и/или соответствующие длины участков определения местоположения предпочтительно образуют кодирование местоположения.
В дополнение к определению местоположения рельсового транспортного средства 110 на основе участков 51-53 определения местоположения, устройство 30 обнаружения может также осуществлять определение местоположения на основе временных интервалов между вводом электромагнитных импульсов Pin в волновод 50 и обнаружением каждого соответствующего образца обратного рассеяния Rm1, Rm2 и Rm3.
На фиг. 2-4 можно видеть, что временные интервалы между соответствующим электромагнитным возбуждающим импульсом Pin и соответствующим образцом обратного рассеяния Rm1, Rm2 и Rm3 во время движения рельсового транспортного средства 110 на рельсовом пути 100 возрастают; это связано с тем, что время распространения электромагнитных импульсов и время распространения электромагнитных образцов обратного рассеяния в волноводе 50 с увеличением расстояния от рельсового транспортного средства 110 до устройства 20 генерации импульсов или устройства 30 обнаружения увеличиваются.
Устройство 60 оценки, следовательно, может на основе временных интервалов T1, T2 и T3 определять дальность и, таким образом, местоположение рельсового транспортного средства 110 и генерировать соответствующий сигнал Se дальности, который образует вспомогательный сигнал определения местоположения. Дальность Ls рельсового транспортного средства 110' на фиг. 1 может, например, рассчитываться по формуле:
Ls=1/2⋅T2/V,
где V обозначает скорость импульсов в волноводе 50. Временной интервал T2 может быть получен из измерения в соответствии с фиг. 3. Коэффициент 1/2 учитывает, что излучение должно проходить соответствующий участок волновода два раза, а именно один раз в прямом направлении и один раз в обратном направлении. Для скорости V справедливо, например:
V=с0/n,
где с0 обозначает скорость света и n - показатель преломления в волноводе 50.
Устройство 30 обнаружения, следовательно, может определять местоположение рельсового транспортного средства 110 дополнительно также на основании временных интервалов T1, T2 и T3, которые проходят между передачей импульсов Pin и приемом соответствующего образца обратного рассеяния Rm1, Rm2 и Rm3.
В качестве особенно предпочтительного рассматривается, если устройство 60 оценки в случае определения местоположения рельсового транспортного средства 110 в области одного из участков 51-53 определения местоположения и генерации соответствующего сигнала So местоположения дополнительно выполняет проверку достоверности.
Такая проверка достоверности может, например, выполняться тем, что устройство 60 оценки при распознавании одного из участков 51-53 определения местоположения и генерации сигнала So местоположения оценивает временной интервал между генерацией импульсов и приемом образца обратного рассеяния (см. временной интервал Т2 согласно фиг. 3) и определяет дальность Ls рельсового транспортного средства 110. Затем устройство 60 оценки может проверить, соответствует ли сигнал Se дальности сформированному сигналу So местоположения.
Например, устройство 60 оценки генерирует сигнал F ошибки, если разность между положением Ls, указанным сигналом Se дальности, и известным положением участка 51 определения местоположения превышает заданное пороговое значение. То же самое справедливо для проверки достоверности для других участков определения местоположения.
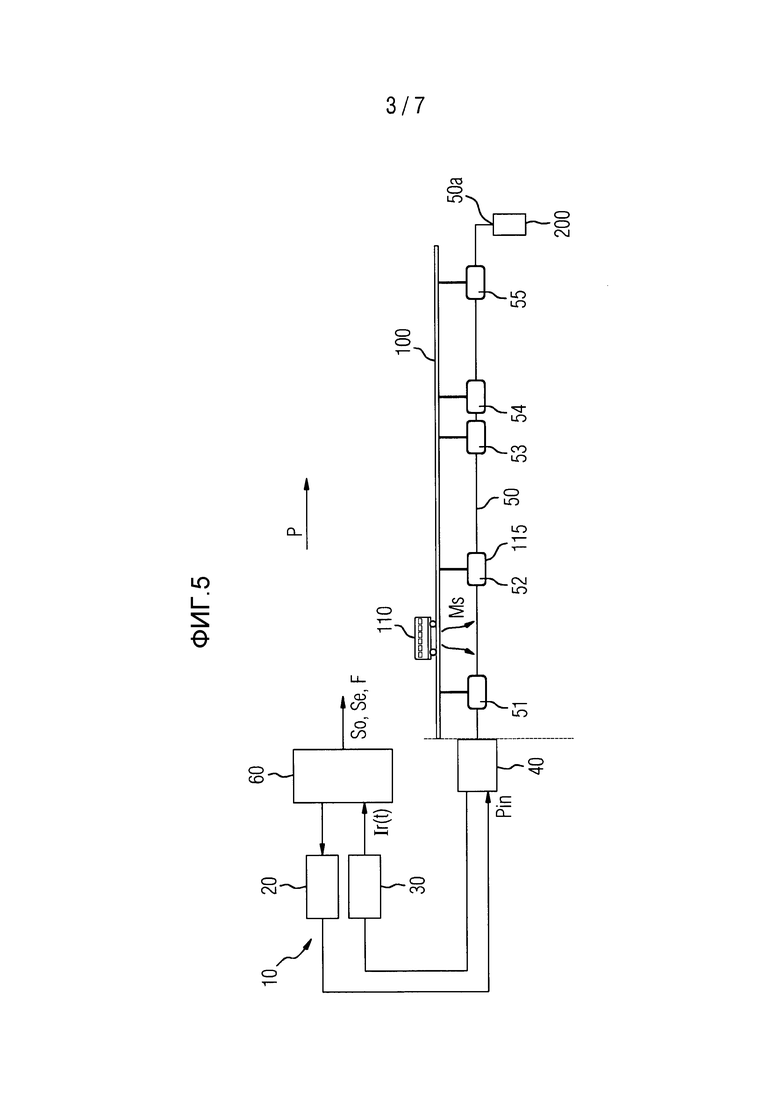
Фиг. 5 показывает пример выполнения для соответствующего изобретению устройства 10 определения местоположения, в котором волновод 50 имеет множество участков 51-55 определения местоположения, которые расположены таким образом, что они образуют кодирование местоположения. Посредством этого кодирования местоположения можно определить местоположение рельсового транспортного средства 110 на рельсовом пути 100, не требуя наблюдения появления и подсчета участков определения местоположения.
Для наглядности кодирование местоположения обозначается посредством кодированного расположения участков 51-55 определения местоположения с использованием только нескольких участков определения местоположения; понятно, что кодирование местоположения может быть оптимизировано с точки зрения точности и возможности оценивания, когда используется гораздо большее число участков определения местоположения.
Кодирование местоположения за счет пространственного кодирования расположения участков определения местоположения может осуществляться, например, тем, что посредством участков определения местоположения формируются двоичные шаблоны кодирования.
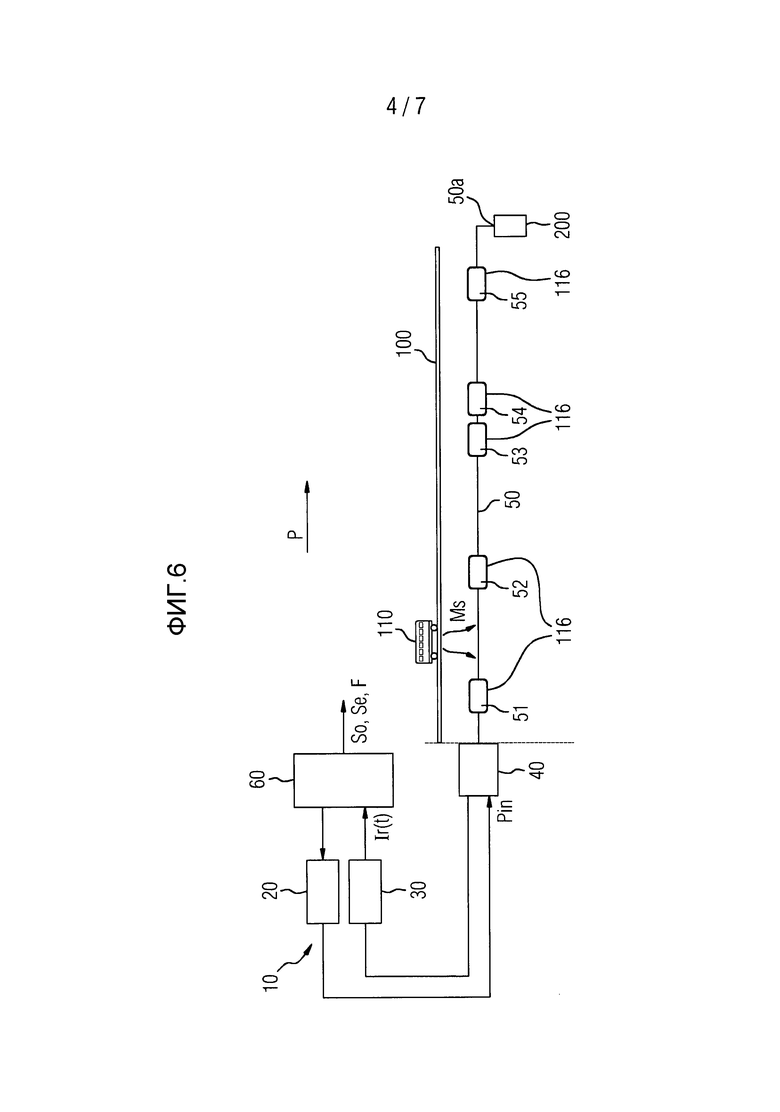
Фиг. 6 показывает пример выполнения устройства 10 определения местоположения, в котором волновод 50 оснащен участками 51-55 определения местоположения, на которых вибрация, воздействующая на волновод 50 из-за проходящего рельсового транспортного средства, меньше, чем за пределами участков 51-55 определения местоположения. Снижение вибрации на участках 51-55 определения местоположения основано, например, на том, что волновод 50 на этих участках механически полностью или по меньшей мере частично развязан от рельсов рельсового пути 100 посредством одного или нескольких демпфирующих элементов 116, которые, соответственно, образуют устройство снижения вибрации. Дополнительно или альтернативно, на участках 51-55 определения местоположения может быть использован материал волновода, который сам по себе имеет более низкую чувствительность к вибрации, чем материал волновода за пределами участков 51-55 определения местоположения.
Если теперь рельсовое транспортное средство 110 движется в направлении, указанном стрелкой Р в соответствии с фиг. 6, то оно будет приводить в механические колебания участок 51 определения местоположения волновода 50. В области участка 51 определения местоположения, однако, действующая на волновод 50 вибрация и/или его чувствительность к вибрации намного меньше, чем вне участков 51-55 определения местоположения, так что это приводит к уменьшению амплитуды образца обратного рассеяния. Это показано на фиг. 8.
Если рельсовое транспортное средство 110 вновь покидает область участка 51 определения местоположения и достигает области между обоими участками 51 и 52 определения местоположения (см. обозначенное ссылочной позицией 110 положение рельсового транспортного средства на фиг. 6), то амплитуда образца обратного рассеяния повышается до нормального уровня. В соответствии с этим амплитуда образца обратного рассеяния Rm3 (см. фиг. 9) соответствует снова первоначальной амплитуде образца обратного рассеяния Rm1 согласно фиг. 7.
Фиг. 10 показывает пример выполнения устройства 10 определения местоположения, в котором измеряются отражения на введенных в волновод и известных по их положению мест 117 помех, и генерируется вспомогательный сигнал ZOS определения местоположения, когда прием образца обратного рассеяния совпадает по времени с отражением от такого места помех.
На фиг. 11 показан пример выполнения соединительного элемента 115, с помощью которого рельс 400 рельсового пути 100 локально механически связан с волноводом 50. Соединительный элемент 115 может представлять собой, например, стержень, шип или трубку. Соединительный элемент вводится перпендикулярно рельсу 400 через железнодорожное полотно 410 к волноводу 50.
Хотя изобретение было подробно проиллюстрировано и описано с помощью предпочтительных примеров выполнения, изобретение не ограничено раскрытыми примерами и другие варианты могут быть получены на этой основе специалистом без отклонения от объема настоящего изобретения.
Изобретение относится к области железнодорожной автоматики и телемеханики. Устройство, реализующее способ определения местоположения рельсового транспортного средства, включает проложенный вдоль рельсового пути волновод, устройство генерации импульсов для генерации и ввода последовательных во времени электромагнитных импульсов в волновод, устройство обнаружения для обнаружения электромагнитных образцов обратного рассеяния, сгенерированных за счет индуцированного транспортным средством обратного рассеяния, устройство оценки для оценки образца обратного рассеяния. Причем волновод вдоль рельсового пути имеет по меньшей мере один участок определения местоположения, на котором чувствительность к вибрации волновода и/или вибрация, воздействующая на волновод, больше или меньше, чем вне участка определения местоположения, а устройство оценки выполнено таким образом, что оно выполняет определение местоположения рельсового транспортного средства по меньшей мере также с учетом амплитуды образца обратного рассеяния. Достигается повышение надежности и точности определения местоположения. 2 н. и 20 з.п. ф-лы, 11 ил.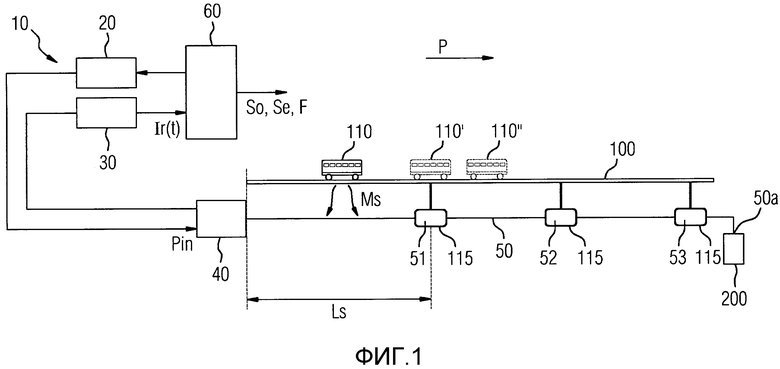
1. Способ для определения местоположения рельсового транспортного средства (110) вдоль рельсового пути (100), вдоль которого проложен волновод (50), причем в способе в волновод (50) последовательно во времени вводят электромагнитные импульсы (Pin) и для каждого переданного импульса принимают и оценивают по меньшей мере один образец обратного рассеяния (Rm1, Rm2, Rm3), генерируемый посредством индуцированного транспортным средством обратного рассеяния электромагнитного импульса,
отличающийся тем, что
- волновод (50) вдоль рельсового пути (100) имеет по меньшей мере один участок (51-55) определения местоположения, в котором чувствительность к вибрации волновода (50) и/или вибрация, воздействующая на волновод (50), больше или меньше, чем вне участка (51-55) определения местоположения,
- оценивают амплитуду принимаемого образца обратного рассеяния (Rm1, Rm2, Rm3) и
- генерируют сигнал местоположения, когда амплитуда принимаемого образца обратного рассеяния (Rm1, Rm2, Rm3) увеличивается или уменьшается с течением времени.
2. Способ по п. 1, отличающийся тем, что
определяют местоположение движущегося на рельсовом пути (100) рельсового транспортного средства (110), причем воздействующая на волновод (50) вибрация на участке (51-55) определения местоположения посредством локальной механической связи между волноводом (50) и рельсовым путем (100) повышается или посредством устройства уменьшения вибрации уменьшается.
3. Способ по п. 1, отличающийся тем, что
чувствительность к вибрации волновода (50) на участке (51-55) определения местоположения повышается или уменьшается за счет того, что на участке (51-55) определения местоположения используют материал волновода с более высокой или более низкой чувствительностью к вибрации, чем на обоих участках волновода, находящихся перед или после соответствующего участка (51-55) определения местоположения.
4. Способ по п. 2, отличающийся тем, что
чувствительность к вибрации волновода (50) на участке (51-55) определения местоположения повышается или уменьшается за счет того, что на участке (51-55) определения местоположения используют материал волновода с более высокой или более низкой чувствительностью к вибрации, чем на обоих участках волновода, находящихся перед или после соответствующего участка (51-55) определения местоположения.
5. Способ по любому из пп. 1-4, отличающийся тем, что дополнительно генерируют вспомогательный сигнал (ZOS) определения местоположения, указывающий местоположение (Ls) рельсового транспортного средства (110).
6. Способ по п. 5, отличающийся тем, что
- измеряют отражения на введенных в волновод и известных по их положению местах помех (117) и
- генерируют вспомогательный сигнал (ZOS) определения местоположения, когда прием образца обратного рассеяния (Rm1, Rm2, Rm3) совпадает по времени с отражением из-за такого места помех (117).
7. Способ по п. 5, отличающийся тем, что
- измеряют временной интервал (Т1, Т2, Т3) между вводом электромагнитных импульсов в волновод (50) и обнаружением соответствующего образца обратного рассеяния (Rm1, Rm2, Rm3) и
- на основе временного интервала генерируют сигнал дальности (Se), указывающий местоположение (Ls) рельсового транспортного средства, в качестве вспомогательного сигнала (ZOS) определения местоположения.
8. Способ по п. 5, отличающийся тем, что
генерируют сигнал ошибки (F), когда расстояние между положением транспортного средства (110), указываемым вспомогательным сигналом (ZOS) определения местоположения, и известным положением участка (51-55) определения местоположения превышает заданный порог.
9. Способ по п. 6, отличающийся тем, что
генерируют сигнал ошибки (F), когда расстояние между положением транспортного средства (110), указываемым вспомогательным сигналом (ZOS) определения местоположения, и известным положением участка (51-55) определения местоположения превышает заданный порог.
10. Способ по п. 7, отличающийся тем, что
генерируют сигнал ошибки (F), когда расстояние между положением транспортного средства (110), указываемым вспомогательным сигналом (ZOS) определения местоположения, и известным положением участка (51-55) определения местоположения превышает заданный порог.
11. Способ по любому из пп. 1-4, 6-10, отличающийся тем, что
- волновод (50) вдоль рельсового пути (100) содержит множество участков (51-55) определения местоположения, в которых чувствительность к вибрации волновода и/или вибрация, воздействующая на волновод, больше или меньше, чем на обоих участках волновода, находящихся перед или после соответствующего участка (51-55) определения местоположения, и
- генерируют соответствующий сигнал (So) местоположения, когда амплитуда принятых образцов обратного рассеяния (Rm1, Rm2, Rm3) с течением времени увеличивается или уменьшается.
12. Способ по п. 5, отличающийся тем, что
- волновод (50) вдоль рельсового пути (100) содержит множество участков (51-55) определения местоположения, в которых чувствительность к вибрации волновода и/или вибрация, воздействующая на волновод, больше или меньше, чем на обоих участках волновода, находящихся перед или после соответствующего участка (51-55) определения местоположения, и
- генерируют соответствующий сигнал (So) местоположения, когда амплитуда принятых образцов обратного рассеяния (Rm1, Rm2, Rm3) с течением времени увеличивается или уменьшается.
13. Способ по п. 11, отличающийся тем, что
при въезде транспортного средства (110) на рельсовый путь (100) после первой генерации сигнала (So) местоположения отсчитывают появления следующих сигналов (So) местоположения и с помощью соответствующего показания счетчика формируют информацию определения местоположения.
14. Способ по п. 12, отличающийся тем, что
при въезде транспортного средства (110) на рельсовый путь (100) после первой генерации сигнала (So) местоположения отсчитывают появления следующих сигналов (So) местоположения и с помощью соответствующего показания счетчика формируют информацию определения местоположения.
15. Способ по п. 11, отличающийся тем, что
- расположение участков (51-55) определения местоположения и/или соответствующая длина участков (51-55) определения местоположения образует кодирование местоположения, и
- при оценке временной характеристики образца (Rm1, Rm2, Rm3) обратного рассеяния распознают кодирование местоположения и осуществляют различение участков (51-55) определения местоположения на основе кодирования местоположения.
16. Способ по любому из пп. 12-16, отличающийся тем, что
- расположение участков (51-55) определения местоположения и/или соответствующая длина участков (51-55) определения местоположения образует кодирование местоположения, и
- при оценке временной характеристики образца (Rm1, Rm2, Rm3) обратного рассеяния распознают кодирование местоположения и осуществляют различение участков (51-55) определения местоположения на основе кодирования местоположения.
17. Устройство определения местоположения для определения местоположения транспортного средства (110) вдоль рельсового пути (100) с
- проложенным вдоль рельсового пути (100) волноводом (50),
- устройством (20) генерации импульсов для генерации и ввода последовательных во времени электромагнитных импульсов (Pin) в волновод,
- устройством (30) обнаружения для обнаружения электромагнитных образцов обратного рассеяния (Rm1, Rm2, Rm3), сгенерированных за счет индуцированного транспортным средством обратного рассеяния, и
- устройством (60) оценки для оценки образца обратного рассеяния (Rm1, Rm2, Rm3),
отличающееся тем, что
- волновод (50) вдоль рельсового пути имеет по меньшей мере один участок (51-55) определения местоположения, на котором чувствительность к вибрации волновода (50) и/или вибрация, воздействующая на волновод (50), больше или меньше, чем вне участка (51-55) определения местоположения, и
- устройство (60) оценки выполнено таким образом, что оно выполняет определение местоположения рельсового транспортного средства (110) по меньшей мере также с учетом амплитуды образца обратного рассеяния (Rm1, Rm2, Rm3).
18. Устройство определения местоположения по п. 17, отличающееся тем, что
- волновод (50) проложен рядом с рельсовым путем (100), и
- воздействующая на волновод (50) вибрация на участке (51-55) определения местоположения посредством локальной механической связи между волноводом (50) и рельсовым путем (100) увеличивается или посредством устройства снижения вибрации снижается.
19. Устройство определения местоположения по п. 17, отличающееся тем, что
волновод (50) имеет на участке (51-55) определения местоположения материал волновода с более высокой или более низкой чувствительностью к вибрации, чем на обоих участках волновода, находящихся перед или после участка (51-55) определения местоположения.
20. Устройство определения местоположения по п. 18, отличающееся тем, что
волновод (50) имеет на участке (51-55) определения местоположения материал волновода с более высокой или более низкой чувствительностью к вибрации, чем на обоих участках волновода, находящихся перед или после участка (51-55) определения местоположения.
21. Устройство определения местоположения по любому из пп. 17-20, отличающееся тем, что
волновод (50) вдоль рельсового пути (100) имеет по маршруту множество участков (51-55) определения местоположения, на которых чувствительность к вибрации волновода
(50) и/или вибрация, воздействующая на волновод (50), больше или меньше, чем на обоих участках волновода, находящихся перед или после соответствующего участка (51-55) определения местоположения.
22. Устройство определения местоположения по п. 21, отличающееся тем, что
расположение участков (51-55) определения местоположения и/или соответствующей длины участков (51-55) определения местоположения образует кодирование местоположения.
| WO 2011027166 A1, 10.03.2011 | |||
| US 5330136 A1, 19.07.1994 | |||
| WO 2012152575 A1, 15.11.2012 | |||
| CN 102358335 A, 22.02.2012 | |||
| МУЛЬТИКАМЕРНЫЙ РАЗРЯДНИК С ОБЩЕЙ НАПОРНОЙ КАМЕРОЙ | 2015 |
|
RU2619909C1 |

