Настоящее изобретение относится к тормозному устройству с электронным управлением для тракторов.
Главная проблема у тракторов, с которой в большинстве случаев сталкиваются обычные трактористы, заключается в том, что для предотвращения скатывания назад трактора из-за силы тяжести при торможении на подъеме, водитель вынужден использовать ручной тормоз или принимать другие неудобные меры, как например, небольшое ускорение для компенсации обратной тяги, вызванной силой тяжести.
Настоящее изобретение разработано для обеспечения простого решения для вышеуказанной проблемы посредством автоматического стояночного устройства на подъеме, не требующего использования ручного тормоза или других неудобных мер.
Не ограничивающий вариант осуществления настоящего изобретения будет описан посредством примера со ссылкой на прилагаемый чертеж.
Позицией 10 на чертеже, в общем, обозначено тормозное устройство с электронным управлением, в частности для тракторов, согласно настоящему изобретению.
Устройство 10 содержит компрессор 11 для подачи сжатого воздуха к блоку 12 обработки воздуха - по существу, к блоку 12 осушения воздуха.
Обработанный воздух хранится в двух параллельных емкостях 13a, 13b, которые соединены пневматически с педальным механизмом 14, который обеспечивает обычное торможение или руление-посредством-торможения (SBF).
Как известно, при таком типе педального механизма 14, когда водитель нажимает только левую (или правую) педаль, тормозное устройство тормозит только заднее левое (или правое) колесо, уменьшая, таким образом, радиус поворота трактора, особенно во время маневров на поворотной полосе.
С емкостью 13a соединен контур 15 для подведения воздуха под высоким давлением (например, 8 бар) к тормозному клапану 16 прицепа (не показан) и соединителю 17 высокого давления, образующему часть узла BTG для подсоединения тормозного устройства прицепа (также не показан).
Как показано на чертеже, первый регулируемый контур C1 воздуха низкого давления и второй регулируемый контур C2 воздуха низкого давления отходят от педального механизма 14.
Первый контур C1 содержит две ветви R1, R2, из которых первая ветвь R1 соединяет пневматически педальный механизм 14 с тормозным клапаном 16 прицепа, а вторая ветвь R2 соединяет пневматически педальный механизм 14 с двумя передними модуляторами 18, 19 антиблокировочной системы.
Модулятор 18 антиблокировочной системы регулирует подачу сжатого воздуха к соответствующему пневматическому/гидравлическому преобразователю 20, который преобразует входящую энергию в форме сжатого воздуха в гидравлическую энергию для приведения в действие соответствующего переднего правого тормоза 21 переднего правого колеса (не показано), установленного на оси AXL1 с обычным дифференциалом DF1.
Аналогичным образом, модулятор 19 антиблокировочной системы регулирует подачу сжатого воздуха к соответствующему пневматическому/гидравлическому преобразователю 22, который преобразует входящую энергию в форме сжатого воздуха в гидравлическую энергию для приведения в действие соответствующего переднего левого тормоза 23 переднего левого колеса (не показано), также установленного на оси AXL1.
Датчик SS1 скорости и датчик SS2 скорости предусмотрены для определения скорости переднего правого колеса и переднего левого колеса соответственно.
Модуляторы 18, 19 антиблокировочной системы и датчики SS1, SS2 скорости передних колес соединены электрически с электронным центральным блоком CNT управления по причинам, объясненным ниже.
Второй контур C2 содержит две ветви RM1 и RM2.
Аналогично ветви R1 контура C1 первая ветвь RM1 соединяет пневматически педальный механизм 14 с клапаном 16, а вторая ветвь RM2 соединяет пневматически педальный механизм 14 с двумя задними модуляторами 24, 25 антиблокировочной системы.
Модулятор 24 антиблокировочной системы регулирует подачу сжатого воздуха к соответствующему пневматическому/гидравлическому преобразователю 26, который преобразует входящую энергию в форме сжатого воздуха в гидравлическую энергию для приведения в действие соответствующего заднего правого тормоза 27 заднего правого колеса (не показано), установленного на оси AXL2 с обычным дифференциалом DF2.
Аналогичным образом, модулятор 25 антиблокировочной системы регулирует подачу сжатого воздуха к соответствующему пневматическому/гидравлическому преобразователю 28, который преобразует входящую энергию в форме сжатого воздуха в гидравлическую энергию для приведения в действие соответствующего заднего левого тормоза 29 заднего левого колеса (не показано), также установленного на оси AXL2.
Датчик SS3 скорости и датчик SS4 скорости предусмотрены для определения скорости заднего правого колеса и заднего левого колеса соответственно.
Модуляторы 24, 25 антиблокировочной системы и датчики SS3, SS4 скорости задних колес также соединены электрически с электронным центральным блоком CNT управления.
Между клапаном 16 и узлом BTG (более конкретно, между клапаном 16 и фитингом 31, образующим часть узла BTG) расположен электрический клапан 30, через который проходит регулируемый сжатый воздух низкого давления, проходящий по первой ветви RM1 контура C2 к узлу BTG.
Электрический клапан 30 представляет собой нормально открытый клапан, управляемый электронным центральным блоком CNT управления.
Устройство 10 согласно настоящему изобретению работает следующим образом:
A) для простого торможения трактора и прицепа (если он имеется), водитель соответствующим образом воздействует на педальный механизм 14, сжатый воздух, регулируемый в соответствии с работой водителем педальным механизмом 14, подается одновременно к четырем модуляторам антиблокировочной системы, инициируя, таким образом, торможение всех четырех колес, которое регулируется при помощи электроники электронным центральным блоком CNT управления, используя логику антиблокировочной системы;
B) для простого торможения трактора, буксирующего прицеп, электрический клапан 30 открыт и поэтому допускает регулируемый воздушный поток к узлу BTG;
C) и наоборот, для осуществления функции руления-посредством-торможения (SBF), используя педальный механизм 14, поскольку ничего не приобретается, а в действительности безопасность водителя даже ставится под угрозу также вовлечением прицепа, электронный центральный блок CNT управления закрывает электрический клапан 30, чтобы прерывать регулируемую подачу воздуха к узлу BTG;
г) скорости четырех колес, определяемые датчиками SS1, SS2, SS3, SS4 и передаваемые электронному центральному блоку CNT управления, очевидно, также играют свою роль в управлении как обычным торможением четырех колес (при открытом электрическом клапане 30), так и рулением-посредством-торможения (SBF) (при закрытом электрическом клапане 30) либо заднего правого колеса тормозом 27, либо заднего левого колеса тормозом 29 в зависимости от требуемого направления поворота.
Устройство 10 также содержит линию CAP, которая начинается непосредственно ниже по потоку от емкости 13b и подводит воздух высокого давления к нормально закрытому клапану 50. Клапан 50 соединен электрически с электронным центральным блоком CNT управления, и может быть либо ЗАКРЫТОГО/ОТКРЫТОГО типа (ON/OFF), либо постепенно открываемого типа (см. ниже).
Ветвь RM2 снабжена сравнивающим клапаном 60, пневматически соединенным с клапаном 50 линией 70.
Более конкретно, сравнивающий клапан 60 делит ветвь RM2 на два участка TR* и TR**.
Как видно из описания работы устройства 10 ниже, сравнивающий клапан 60 определяет мгновенное давление воздуха в точке P1 по участку TR* и точке P2 по линии 70, сравнивает давления в точках P1 и P2 и открывается на стороне более высокого давления.
Другими словами, если сравнивающий клапан 60 определяет более высокое давление в точке P2, чем в точке P1, он открывается на стороне линии 70 для соединения линии 70 с участком TR**. Наоборот, если сравнивающий клапан 60 определяет более высокое давление в точке P1, чем в точке P2, он открывается на стороне участка TR* для соединения участка TR* с участком TR**.
Сравнивающий клапан 60 и точки P1 и P2 также соединены электрически с электронным центральным блоком CNT управления.
Линия CAP, клапан 50, линия 70 и сравнивающий клапан 60 образуют средство DS для подачи воздуха высокого давления и выбора наибольшего давления подачи воздуха к задним модуляторам 24, 25.
Электронный центральный блок CNT управления также соединен электрически с датчиком 80 ускорения, который, даже когда трактор неподвижен на подъеме, определяет отрицательное ускорение (относительно направления передвижения трактора), вызываемое силой тяжести, которая, как известно, стремится тянуть трактор в обратном направлении.
Электронный центральный блок CNT управления также соединен электрически с датчиком 90 скорости трактора, датчиком 100, соединенным с педалью акселератора (не показана), и датчиком 110 направления передвижения (вперед (F) или назад (B)).
Устройство 10 согласно настоящему изобретению работает следующим образом:
E) когда трактор остановлен на подъеме (например, красным светом), это определяется датчиком 80 ускорения, который соответствующим образом передает сигнал электронному центральному блоку CNT управления. (В качестве альтернативы, может быть определено обратное перемещение при включенной передаче переднего хода).
F) электронный центральный блок CNT управления, вследствие этого, передает сигнал нормально закрытому клапану 50, который открывается для приведения линии 70 к высокому давлению (например, 8 бар);
G) после сравнения давлений в точках P1 и P2 и определения более высокого давления в точке P2, чем в точке P1 (так как педальный механизм 14 не нажат водителем, то контуры C1 и C2 разгружены), сравнивающий клапан 60 соединяет линию 70 с участком TR** для подвода воздуха высокого давления к модуляторам 24, 25.
H) преобразователи, затем приводят в действие тормоза 27, 29, которые действуют как стояночные тормоза;
I) когда водитель нажимает педаль акселератора, датчик 100 передает сигнал центральному блоку CNT управления, который при помощи электроники закрывает клапан 50 для разгрузки модуляторов 24, 25;
L) в этот момент давление в точке P2 падает до нуля, так что давление в точке P1 выше, чем в точке P2, и сравнивающий клапан 60 снова соединяет участки TR* и TR** ветви RM2 и отсоединяет линию 70 от участка TR**, восстанавливая, таким образом, исходное тормозное устройство.
Хотя вышеприведенное описание со ссылкой на прилагаемый чертеж относится к конкретному электронному устройству, использующими логику антиблокировочной системы, идеи настоящего изобретения также применимы к любому тормозному устройству с электронным управлением, такому как устройство с электрическим управлением тормозной системой.
Аналогичным образом, хотя вышеприведенное описание относится к устройству, содержащему четыре модулятора антиблокировочной системы, идеи настоящего изобретения могут быть также применимы к трехканальным устройствам (т.е. с двумя модуляторами антиблокировочной системы для задних колес и одним модулятором антиблокировочной системы для обоих передних колес) или даже к двухканальным устройствам (т.е. только с двумя модуляторами антиблокировочной системы для задних колес).
Устройство согласно настоящему изобретению обеспечивает следующие функции:
1) электронное торможение с использованием антиблокировочной системы;
2) электронное руление-посредством-торможения (e-SBF);
3) управление поворачивающим моментом (YMC);
4) управление торможение на поворотах (CBC) для стабилизации и предотвращения отклонения трактора от прямого пути при торможении на поворотах; это управление работает без вмешательства со стороны устройства антиблокировочной системы;
5) динамическое управление заносом (DDC) для стабилизации транспортного средства при торможении на поворотах и предотвращения отклонения от прямого пути во время вмешательства устройства антиблокировочной системы;
6) электронное распределение тормозных усилий (EBD) во избежание повреждения сцепления;
7) автономную функцию руления-посредством-торможения (ASBF); В этом случае, когда водитель поворачивает рулевое колесо, автоматически приводится в действие электронная функция руления-посредством-торможения (e-SBF) для содействия рулению без прямого вмешательства водителя на тормозные педали; электронный центральный блок CNT управления открывает клапан 50 и одновременно разгружает модулятор 24 для поворота налево, и в то же самое время от клапана 50 к тормозу 29 через модулятор 25 подается высокое давление. Это также применимо, когда водитель совершает правый поворот.
8) механизм удержания на уклоне (HH). Как уже описано, эта функция обеспечивает автоматическое удержание трактора, заторможенного на подъеме, без использования ручного тормоза.
9) устройство управления тягой (ASR). Эта функция задействуется автоматически, когда водитель, например, ускоряется на грязном грунте, и одно колесо начинает пробуксовывать. Когда функция пробуксовочной системы задействована, устройство автоматически тормозит только пробуксовывающее колесо для переноса крутящего момента к колесу на твердом грунте. Если левое колесо пробуксовывает, электронный центральный блок CNT управления открывает клапан 50 и одновременно разгружает модулятор 24, в то же самое время от клапана 50 к тормозу 29 через модулятор 25 подается высокое давление, чтобы затормозить левое колесо и остановить пробуксовку, улучшая, таким образом, тягу правого колеса. Это также предотвращает превышение допустимого числа оборотов двигателя трактора и обеспечивает большую мощность колесу с тягой.
Преимущества настоящего изобретения состоят в следующем:
повторный пуск трактора на подъеме более не требует использования ручного тормоза;
функция автономного руления-посредством-торможения упрощает маневрирование в ограниченных пространствах без необходимости для водителя работать тормозными педалями; и
функция пробуксовочной системы улучшает тягу на неровном грунте без необходимости для водителя задействовать механизм блокировки дифференциала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРМОЗНАЯ СИСТЕМА С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ ДЛЯ ТРАКТОРОВ С ПРИЦЕПОМ | 2009 |
|
RU2484991C2 |
| ПЕДАЛЬНЫЙ МЕХАНИЗМ ТОРМОЖЕНИЯ И РУЛЕНИЯ-ПОСРЕДСТВОМ-ТОРМОЖЕНИЯ ДЛЯ ТРАКТОРОВ | 2009 |
|
RU2484990C2 |
| РУЛЕВОЙ И ТОРМОЗНОЙ ПЕДАЛЬНЫЙ МЕХАНИЗМ ДЛЯ ТРАКТОРОВ | 2009 |
|
RU2482987C2 |
| УЗЕЛ ВОЗДУХОПОДГОТОВКИ ДЛЯ ТОРМОЗНОГО УСТРОЙСТВА КОММЕРЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЭКСПЛУАТАЦИИ УСТРОЙСТВА ВОЗДУХОПОДГОТОВКИ | 2017 |
|
RU2717883C1 |
| ТОРМОЗНОЙ ПРИВОД АВТОМОБИЛЯ | 2011 |
|
RU2495769C2 |
| БЛОК УПРАВЛЕНИЯ ТОРМОЗНОЙ СИСТЕМОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2544252C2 |
| ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2266828C2 |
| ПРИВОДНОЕ УСТРОЙСТВО | 2007 |
|
RU2428332C2 |
| СПОСОБ ОБНАРУЖЕНИЯ БЛОКИРОВКИ КОЛЕС НА ДВИЖУЩЕМСЯ ТРАНСПОРТНОМ СРЕДСТВЕ | 2017 |
|
RU2665128C1 |
| БЛОК УПРАВЛЕНИЯ ТОРМОЗАМИ ГРУЗОВОГО АВТОМОБИЛЯ С ПРИЦЕПОМ | 2013 |
|
RU2643302C2 |
Изобретение предназначено для автоматического инициирования торможения транспортного средства. Линия CAP, клапан (50), линия (70), сравнивающий клапан (60), образуют средство DS для подачи воздуха высокого давления и выбора наибольшего давления подачи воздуха к задним модуляторам (24, 25). Клапан (50), сравнивающий клапан (60) соединены с центральным электронным блоком управления (CNT). Датчики ускорения (80), направления передвижения (110) предназначены для определения остановки трактора на подъеме. При остановке трактора на подъеме с помощью средства (DS) выбирают максимальное давление подачи текучей среды к задним модуляторам (24, 25), когда педальный механизм (14) не нажат, а датчики (80, 110) определили, что трактор остановлен на подъеме. Достигается предотвращение скатывания назад трактора при торможении на подъеме, электронное руление посредством торможения, управление торможением на поворотах, динамическое управление заносом без вмешательства АБС, автономная функция руления посредством торможения, управление тягой. 13 з.п. ф-лы, 1 ил.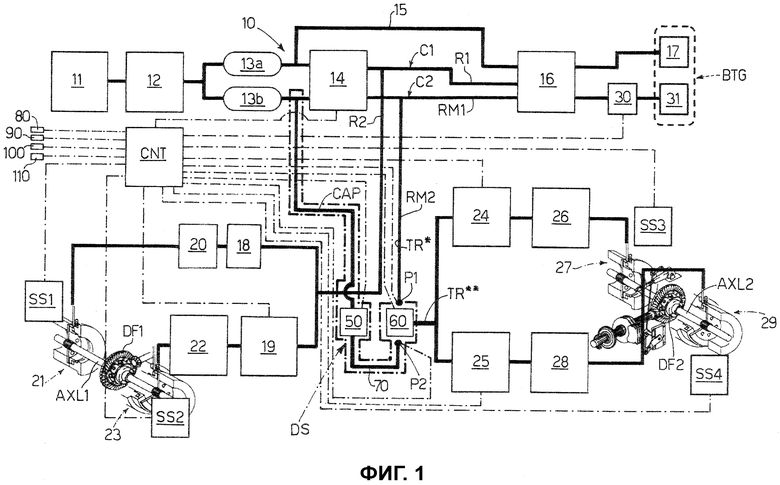
1. Тормозное устройство (10) с электронным управлением для тракторов, содержащее:
средства (11, 12, 13a, 13b, 15, C1, C2) для получения и распределения сжатой текучей среды;
средство (14) для торможения и руления посредством торможения (SBF) трактором; и
средства (18, 19, 24, 25) модулирования сжатой текучей среды для приведения в действие тормозов (21, 23, 27, 29) трактора, причем средства (18, 19, 24, 25) модулирования соединены электрически с электронным центральным блоком (CNT) управления торможением;
отличающееся тем, что оно также содержит
средство (80, 90, 110), соединенное с электронным центральным блоком (CNT) управления, для определения остановки трактора на подъеме, и
средство (DS) для подачи текучей среды высокого давления к задним модуляторам (24, 25), соединенное с электронным центральным блоком (CNT) управления и выполненное с возможностью выбора максимального давления подачи текучей среды к задним модуляторам (24, 25), когда средство (14) для торможения не нажато, а средство (80, 90, 110) для определения остановки трактора на подъеме определило, что трактор остановлен на подъеме.
2. Устройство (10) по п.1, отличающееся тем, что средство (DS) содержит первую линию (CAP), нормально закрытый клапан (50), вторую линию (70) и сравнивающий клапан (60).
3. Устройство (10) по п.2, отличающееся тем, что сравнивающий клапан (60) делит ветвь (RM2) на первый и второй участки (TR*, TR**), а сравнивающий клапан (60) определяет мгновенное давление текучей среды в первой точке (P1) по первому участку (TR*) и мгновенное давление текучей среды во второй точке (P2) по второй линии (70), при этом сравнивающий клапан (60) сравнивает давления в первой и второй точках (P1, P2) и открывается на стороне более высокого из двух давлений, то есть после определения более высокого давления во второй точке (P2), чем в первой точке (P1), сравнивающий клапан (60) открывается на стороне второй линии (70) для соединения второй линии (70) со вторым участком (TR**), и наоборот, после определения более высокого давления в первой точке (P1), чем во второй точке (P2), и сравнивающий клапан (60) открывается на стороне первого участка (TR*) для соединения первого участка (TR*) со вторым участком (TR**).
4. Устройство (10) по п.1, отличающееся тем, что средства (18, 19, 24, 25) модулирования воздействуют на пневматические/гидравлические средства (20, 22, 26, 28) преобразования, которые преобразуют входящую энергию в форме сжатого воздуха в гидравлическую энергию для приведения в действие соответствующих тормозов (21, 23, 27, 29).
5. Устройство (10) по п.1, отличающееся тем, что содержит дополнительные средства (16, 30, BTG) для торможения только прицепа, причем дополнительные средства (16, 30, BTG) содержат нормально закрытое клапанное средство (30), обычно обеспечивающее одновременное торможение трактора и прицепа, причем клапанное средство (30) управляется электронным центральным блоком (CNT) управления для открытия при приведении в действие функции руления-посредством-торможения (SBF).
6. Устройство (10) по п.1, отличающееся тем, что электронный центральный блок (CNT) управления управляет средствами (18, 19, 24, 25) модулирования.
7. Устройство (10) по п.1, отличающееся тем, что электронный центральный блок (CNT) управления принимает и обрабатывает сигналы, указывающие мгновенные скорости колес трактора.
8. Устройство (10) по п.7, отличающееся тем, что сигналы, указывающие мгновенные скорости колес трактора, передаются множеством датчиков (SS1, SS2, SS3, SS4), каждый из которых расположен на соответствующем колесе.
9. Устройство (10) по п.1, отличающееся тем, что:
средство (14) для торможения трактора и прицепа и для руления-посредством-торможения (SBF) только трактором, и
средства (18, 19, 24, 25) модулирования сжатой текучей среды, воздействующие на средства (20, 22, 26, 28) преобразования и предназначенные для приведения в действие тормозов (21, 23, 27, 29) трактора,
образуют часть тормозного устройства антиблокировочной системы.
10. Устройство (10) по п.9, отличающееся тем, что содержит четыре модулятора антиблокировочной системы.
11. Устройство (10) по п.9, отличающееся тем, что оно содержит три модулятора антиблокировочной системы, т.е. два модулятора антиблокировочной системы для задних колес и один модулятор антиблокировочной системы для обоих передних колес.
12. Устройство (10) по п.9, отличающееся тем, что оно содержит два модулятора антиблокировочной системы для задних колес.
13. Устройство (10) по п.1, отличающееся тем, что:
средство (14) для торможения трактора и прицепа и для руления-посредством-торможения (SBF) только трактором, и
средства (18, 19, 24, 25) модулирования сжатой текучей среды, воздействующие на средства (20, 22, 26, 28) преобразования и предназначенные для приведения в действие тормозов (21, 23, 27, 29) трактора,
образуют часть электрически управляемого тормозного устройства.
14. Устройство по п.1, отличающееся тем, что средство (80, 90, 110) для определения остановки трактора на подъеме представляет собой датчик (80) ускорения, датчик (90) скорости и/или датчик (110) направления передвижения.
| Тормозная система транспортного средства | 1984 |
|
SU1174302A1 |
| US 3129035 A, 14.04.1964 | |||
| СИХА, МИДЗУТАНИ | |||
| Введение в автомобильную электронику | |||
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
| NISHIIKE Y | |||
| at al | |||
| "Direct YAW moment control by braking force distribution for handling and stability of agricultural tractors" | |||
| В: «International Conference on Automation Technology for Off-road Equipment» | |||

