Изобретение относится к области обработки данных и может быть использовано для создания систем локального позиционирования объектов, в частности для определения местонахождения оборудования и людей в помещениях и на прилегающих площадках, наблюдения за их перемещением.
Известно, что вблизи и внутри зданий затруднительно применение спутниковых навигационных систем в качестве мобильных устройств позиционирования. Это связано с затуханием и отражением спутникового сигнала при прохождении через металлосодержащие конструкции. Существуют локальные системы позиционирования, основанные на сигналах мобильных сетей связи, точность позиционирования которых во многом зависит от плотности распределения сотовых станций. Работа систем локального позиционирования, основанных на беспроводных Интернет-сетях, таких как Wi-Fi, зависит от плотности распределения точек доступа.
Известна интеллектуальная система безопасности и мониторинга объектов угледобывающих предприятий, содержащая блок информационных и исполнительных элементов, контроллер, модуль цифрового видеонаблюдения, устройство контроля и управления, группу радиочастотных идентификаторов и группу радиочастотных считывателей [RU 98836 U1, G08B 19/00, G08B 21/22, G08B 23/00, 27.10.2010].
Недостатком данной системы является относительно низкая точность позиционирования объектов, поскольку для этого используется информация только о положении самих радиочастотных считывателей, которые получили сигнал от радиочастотных идентификаторов. Следовательно, точность позиционирования определяется суммарной областью чувствительности всех радиочастотных считывателей, которые получили сигнал от соответствующих радиочастотных идентификаторов.
Также известна локальная система позиционирования и управления перемещением объектов, содержащая вычислители положения, ультразвуковые приемники, не менее трех ультразвуковых излучателей и не менее одного ультразвукового приемника корректирующего канала [RU 2011146813 A, G01S 5/18, 27.05.2013].
Установка вычислителей положения на объектах неизбежно ведет к необходимости передачи данных от отдельных вычислителей в единый вычислитель положения всех объектов для создания общей картины событий. Это приводит к усложнению и утяжелению конструкции и, как следствие, возрастанию энергопотребления на объектах, связанного с вычислениями координат и передачей данных.
Наиболее близкой по технической сущности к предлагаемому изобретению является система локального позиционирования персонала на крупных техногенных объектах. Система содержит устройство контроля, группу радиомаяков-идентификаторов, по крайней мере три измерительных приемо-передающих устройства, соединенных по радиоканалу приема с группой радиомаяков-идентификаторов, а по каналу передачи - с устройством контроля, измерительные приемо-передающие устройства измеряют расстояние до соответствующих радиомаяков-идентификаторов по уровню принимаемого от них сигнала, устройство контроля определяет местоположение персонала на объекте, причем по крайней мере три измерительных приемо-передающих устройства разнесены по площади объекта, а радиомаяки-идентификаторы установлены на персонале [RU 108184 U1, G08B 19/00, G06K 7/10, 10.09.2011].
Точность такой системы локального позиционирования весьма низкая. Дело в том, что сила сигнала радиопередатчика падает нелинейно при увеличении расстояния. На малых расстояниях разность в силе сигнала велика, но с увеличением расстояния разность в силе сигнала снижается и становится сравнимой с ошибкой измерений. Таким образом, для систем, построенных на измерении силы сигнала, требуется высокая плотность расстановки оборудования. При этом для определения координат необходимы хотя бы три точки приема сигнала, значительно разнесенные в контролируемом пространстве.
Требуемый технический результат заключается в повышении точности позиционирования системы.
Задача, решаемая разработчиками для достижения требуемого технического результата, - переход от определения расстояния до объекта по уровню принимаемого радиосигнала к определению расстояния по задержке распространения ультразвукового сигнала относительно радиосигнала. Использование ультразвукового сигнала, имеющего меньшую скорость распространения в среде по сравнению с радиосигналом, позволяет более точно определить расстояние, пройденное сигналом за промежуток времени. Радиосигнал в этом случае можно использовать для задания момента формирования ультразвукового сигнала. Учитывая, что ультразвуковой сигнал плохо проходит через заграждения, между ультразвуковым передатчиком и ультразвуковым приемником не должно быть препятствий для прохождения ультразвуковой волны (идентификаторы должны находиться в прямой видимости от приемопередатчиков). Учитывая затухание ультразвукового сигнала при распространении, то есть то, что уровень принятого сигнала будет зависеть от пройденного им пути, приемо-передающие устройства должны адаптироваться к условиям приема. Упростить им эту задачу можно, сконцентрировав приемопередатчики в одном месте на известном расстоянии друг от друга, например в устройстве контроля, что обеспечит практически одинаковый уровень принимаемых сигналов. Использование ультразвукового сигнала позволит с высокой точностью без использования сложных устройств определить местоположение объекта в пространстве по данным о расстоянии от объекта до нескольких точек, расположенных на сравнительно малом и известном расстоянии друг от друга.
Известно, что расстояние до объекта S пропорционально скорости распространения ультразвукового сигнала V и времени задержки распространения ультразвукового сигнала относительно радиосигнала Δt:
S≈V⋅Δt.
Технический результат достигается за счет того, что система локального позиционирования объектов, содержащая идентификаторы, установленные на объектах, приемо-передающие устройства и устройство контроля, причем идентификаторы соединены по радиоканалу приема и по ультразвуковому каналу передачи с приемо-передающими устройствами, которые по шине управления и шине данных соединены с входящим в устройство контроля вычислительным устройством и также входят в устройство контроля, располагаясь в нем на известных расстояниях друг от друга, при этом устройство контроля находится в прямой видимости от объектов и находящееся в нем вычислительное устройство определяет местоположение объектов по времени задержки распространения ультразвукового сигнала относительно радиосигнала, идентификаторы активируются персональными кодовыми радиосигналами, а блок контроля, входящий в устройство контроля, проверяет правильность функционирования всей системы в целом.
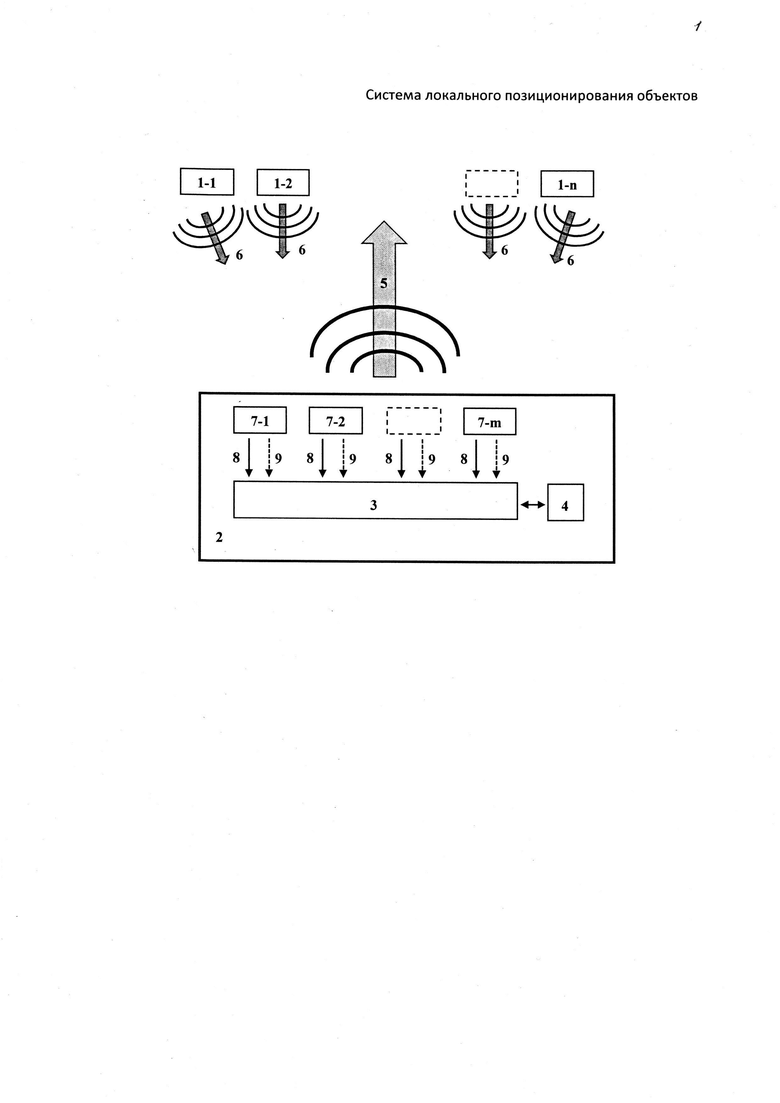
На чертеже представлена функциональная схема системы локального позиционирования объектов.
Система локального позиционирования объектов содержит идентификаторы - 1 (1-1 - 1-n) и устройство контроля - 2, содержащее вычислительное устройство - 3 и блок контроля - 4. Идентификаторы - 1 (1-1 - 1-n) установлены на объектах и соединены по радиоканалу приема - 5 и по ультразвуковым каналам передачи - 6 с приемопередающими устройствами - 7 (7-1 - 7-m), которые по шине управления - 8 и шине данных - 9 соединены с входящим в устройство контроля - 2 вычислительным устройством - 3 и также входят в устройство контроля - 2, располагаясь в нем на известных расстояниях друг от друга. Устройство контроля - 2 находится в прямой видимости от объектов (идентификаторов). Вычислительное устройство - 3 определяет местоположение объекта по времени задержки распространения ультразвукового сигнала относительно радиосигнала. При этом идентификаторы - 1 (1-1 - 1-n) активируются персональными кодовыми радиосигналами. В устройство контроля - 2 входят приемо-передающие устройства - 7 (7-1 - 7-m).
Система локального позиционирования объектов работает следующим образом.
Определение местоположения объекта сводится к определению расстояния до известных точек. Для этого контрольное устройство 2 формирует на приемо-передающих устройствах 7 радиосигнал по радиоканалу 5, предназначенный для идентификатора 1-1, который регистрирует этот сигнал и формирует сигнал по ультразвуковому каналу передачи 6. Ультразвуковой сигнал достигает приемо-передающих устройств 7 (7-1 - 7-m), которые по шине управления 8 и шине данных 9 соединены с вычислительным устройством 3, с разной задержкой, так как приемо-передающие устройства 7 (7-1 - 3-m) установлены в устройстве контроля 2 на известном расстоянии друг от друга. По этим задержкам относительно радиосигнала и определяется местоположение объекта с установленным идентификатором
Далее, входящее в контрольное устройство 2 вычислительное устройство 3 формирует на приемо-передающих устройствах 7 сигнал по радиоканалу 5, предназначенный для идентификатора 1-2, который регистрирует этот сигнал и формирует сигнал по ультразвуковому каналу 6. Ультразвуковой сигнал достигает приемо-передающих устройств 7 (7-1 - 7-m), которые регистрируют его, и вычислительное устройство 3 определяет местоположение объекта с установленным идентификатором 1-2.
И так далее по очереди. После того как местоположение объекта с установленным идентификатором 1-n определено, вычислительное устройство 3 устройства контроля 2 возвращается к формированию радиосигнала для идентификатора 1-1. Блок контроля 4 устройства контроля 2 проверяет правильность функционирования всей системы в целом.
Ультразвуковой сигнал имеет меньшую относительно радиосигнала скорость распространения, что позволяет более точно определить расстояния до объектов, так как расстояния определяются по времени распространения, а оно значительно увеличивается по сравнению с радиосигналом. Равному промежутку времени соответствует меньшее расстояние, следовательно, равная ошибка в определении интервалов времени имеет меньшее влияние на вычисления расстояний.
Таким образом, благодаря решению поставленной задачи по переходу на определение расстояния до объекта по задержке распространения ультразвукового сигнала относительно радиосигнала достигнут требуемый технический результат. Точность системы локального позиционирования объектов значительно повысилась.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система доставки груза горнодобывающим субъектом на место проведения взрывных работ (варианты) | 2024 |
|
RU2839710C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ С ПРИМЕНЕНИЕМ РАДИОФОТОННЫХ ЭЛЕМЕНТОВ | 2018 |
|
RU2692696C1 |
| КОМПЛЕКС БОРТОВЫХ СРЕДСТВ ЦИФРОВОЙ СВЯЗИ | 2020 |
|
RU2742947C1 |
| СИСТЕМА РАДИОСВЯЗИ С ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2023 |
|
RU2817401C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2021 |
|
RU2779079C1 |
| Способ локального позиционирования узла-нарушителя информационной безопасности в мобильных системах передачи данных | 2019 |
|
RU2744808C2 |
| СПОСОБ И СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2020 |
|
RU2744672C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2535922C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544007C2 |
| ЛОКАЛЬНАЯ СИСТЕМА МОНИТОРИНГА МЕСТОПОЛОЖЕНИЯ И ПАРАМЕТРОВ ДВИЖЕНИЯ СПОРТСМЕНОВ И СПОРТИВНЫХ СНАРЯДОВ | 2018 |
|
RU2691947C1 |
Изобретение относится к области обработки данных и может быть использовано для создания систем локального позиционирования объектов, в частности для определения местонахождения оборудования и людей в помещениях и на прилегающих площадках. Достигаемый технический результат - повышение точности позиционирования системы. Указанный результат достигается за счет того, что система локального позиционирования объектов содержит идентификаторы и устройство контроля, при этом в устройство контроля входит блок контроля, приемо-передающие устройства, расположенные на известном расстоянии друг от друга, вычислительное устройство. Идентификаторы установлены на объектах и соединены по радиоканалу приема и ультразвуковому каналу передачи с приемо-передающими устройствами, которые по шине управления и шине данных соединены с вычислительным устройством. Местоположение объектов определяется по времени задержки распространения ультразвукового сигнала относительно радиосигнала. 1 ил.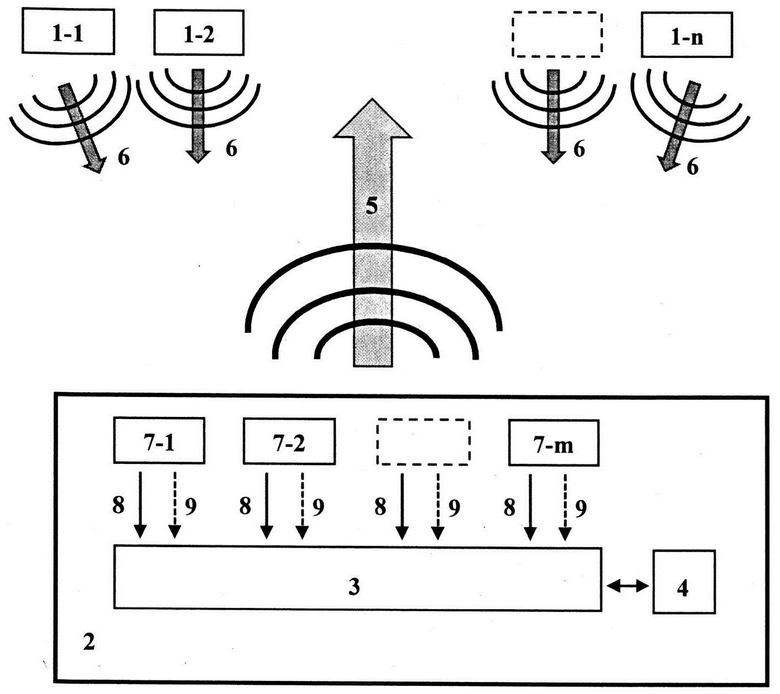
Система локального позиционирования объектов, содержащая идентификаторы, установленные на объектах, приемо-передающие устройства и устройство контроля, отличающаяся тем, что идентификаторы соединены по радиоканалу приема и по ультразвуковому каналу передачи с приемо-передающими устройствами, которые по шине управления и шине данных соединены с входящим в устройство контроля вычислительным устройством и также входят в устройство контроля, располагаясь в нем на известных расстояниях друг от друга, при этом устройство контроля находится в прямой видимости от объектов и находящееся в нем вычислительное устройство определяет местоположение объектов по времени задержки распространения ультразвукового сигнала относительно радиосигнала, идентификаторы активируются персональными кодовыми радиосигналами, а блок контроля, входящий в устройство контроля, проверяет правильность функционирования всей системы в целом.
| Устройство для продольной разрезки оттисков, например, на двух оборотных плоскопечатных машинах | 1956 |
|
SU108184A1 |
| Десятичный реверсивный счетчик на плоскостных полупроводниковых триодах | 1959 |
|
SU123568A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА В ЗАКРЫТЫХ ПОМЕЩЕНИЯХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2351945C1 |
| US 6044256 A1, 28.03.2000 | |||
| US 7151447 B1, 19.12.2006 | |||
| Устройство соединения разделяемых элементов летательного аппарата | 2015 |
|
RU2630565C2 |

