Изобретение относится к области телемеханики и технических средств охраны (ТСО) важных объектов и границ на основе извещателей, датчиков или сенсоров, использующих различные физические принципы обнаружения нарушителей. Он может быть использован для повышения сигнализационной надежности существующих и разрабатываемых извещателей в различных условиях их эксплуатации, в том числе при действии помех различного происхождения. Технический результат от использования изобретения заключается в уменьшении вероятности ложных срабатываний, приводящих к формированию сигналов ложной тревоги.
Известен «Способ охраны периметра объекта» ([1], RU 2263968, МПИ7 G08B 13/02). Он обеспечивает охрану любых типов ограждений от перелаза, разрушения и подкопа. Данный способ предполагает установку ограждения, монтаж чувствительного элемента (ЧЭ) на фланг протяженного ограждения, определение амплитудно-частотных характеристик сигнала, получаемого от ЧЭ, характерных для преодоления нарушителем ограждения методом перелаза, разрушения или подкопа, обработку текущего значения сигнала с ЧЭ и по мере получения определенных ранее характеристик сигнала - выдачу тревожного сообщения.
К недостаткам данного способа охраны следует отнести:
- большие затраты на монтаж и настройку оборудования, вызванные сложностью выполняемых работ по обеспечению охраны важных объектов с использованием инженерных сооружений заградительного типа;
- большие затраты при необходимости изменения границ охраняемой территории;
- отсутствие функции определения способа преодоления нарушителем ограждения;
- снижение вероятности обнаружения и повышение вероятности ложных срабатываний при воздействии климатических факторов: ветровых нагрузок, обледенения, снежных заносов и температуры окружающей среды.
Наиболее близким из известных аналогов является «Способ охраны периметра объекта» ([2], патент 2473970 С1, МПИ7 G08B 13/02, опубликованный 27.01.2013 г., бюл. №3) заключающийся в том, что устанавливают чувствительный элемент (ЧЭ) извещателя на участке ограждения, устанавливают признаки сигнала, определяющие преодоление нарушителем ограждения, фиксируют полученные значения сигналов с чувствительных элементов и выделяют из них признаки, свойственные нарушителю, сравнивают значение с их установленной величиной и по результатам сравнения определяют момент выдачи сигнала тревоги, отличающийся тем, что выделяют конструктивно законченный элемент ограждения, исходя из его пространственных параметров, определяют зоны воздействия на него нарушителя в процессе преодоления способом перелаза, формируют независимые зоны чувствительности на полотне ограждения, определяют последовательность появления сигналов из сформированных зон чувствительности и предельные значения времени между сигналами этой последовательности, получают сигналы из зон чувствительности и сравнивают полученный порядок формирования сигналов с определенной ранее последовательностью, а также интервалы времени между сигналами из независимых зон чувствительности, в случае совпадения полученного порядка с определенной последовательностью и нахождения времени между сигналами из независимых зон чувствительности в определенных изначально временных интервалах, выдают сигнал тревоги.
Способ [2] по п. 1 также отличается тем, что определяют зоны воздействия нарушителя на ограждение в процессе преодоления способом контроля разрушения инженерного сооружения заградительного типа и устанавливают порядок появления сигналов в определенных ранее зонах чувствительности.
При этом в качестве извещателя используют генератор частоты с включенным в его частотно-задающую цель емкостным ЧЭ, оказывающим влияние на частоту генератора. Описание работы такого извещателя приведено в патентах ([2], патент RU 2126173, МПК G08B 13/26, [3], патент RU 2379759, МПК G08B 13/26 и [4], патент RU 2491646, МПК G08C 15/08, G08B 13/26).
К недостаткам способа охраны периметра [3] следует отнести:
- повышение вероятности ложных срабатываний при нахождении в непосредственной близости с ЧЭ подвижных предметов, например, стаи птиц;
- необходимость контроля состояния пространства, окружающего заграждение;
- необходимость контроля состояния чувствительных элементов и извещателей и оперативной оценки влияния на них погодных условий для осуществления необходимой регулировки порогов, превышение которых приводит к формированию сигналов тревоги;
- невозможность определения места проникновения нарушителя в пределах одного чувствительного элемента;
- недостаточную сигнализационную надежность извещателя, для повышения которой используют сигнализационное заграждение, что не представляет возможным при использовании технических средств охраны (ТСО) незаградительного типа.
Также к числу общих недостатков существующих способов и технических средств охраны, использующих различные чувствительные элементы (ЧЭ) и извещатели, на основе сигналов которых формируют сообщения тревоги, следует отнести:
- ориентацию на системы охраны объектов заградительного типа, предполагающего установку заграждений, что не всегда возможно, прежде всего, из-за необходимости значительных затрат и времени на их возведение, однако при отсутствии заграждений существенно повышаются требования к сигнализационной надежности извещателей, которые при существующей системе обработки формируемых сигналов и получаемой информации не могут быть обеспечены;
- невозможность поддержания сигнализационной надежности ЧЭ и извещателей на требуемом уровне, что связано с ростом числа воздействий на ЧЭ и извещатели, которые воспринимаются ими в качестве помех и приводят, в итоге, к уменьшению вероятности обнаружения нарушителя и к сокращению интервалов времени между сигналами ложных тревог (этот недостаток становится одним из основных при искусственно формируемых воздействиях на ЧЭ, извещатели, системы сбора информации и каналы связи);
- наличие ситуаций, при которых наблюдаются ограниченные возможности обнаружения фактов проникновения нарушителей на охраняемые зоны и территории при использовании ЧЭ и извещателей одного типа, отсутствие достаточно эффективных способов комплексирования сигналов ЧЭ и извещателей, использующих различные физические принципы обнаружения фактов нарушений;
- отсутствие возможности оперативного контроля правильности функционирования извещателей, оценивания показателей достоверности формируемых ими данных и сигналов и обеспечения самонастройки извещателей, систем сбора информации и устройств принятия решений под изменившиеся условия эксплуатации, определяемые изменением состояния внешней среды под влиянием различных погодных влияний и появляющимися при этом помехами, что, в конечном итоге, приводит к увеличению вероятности формирования сообщений ложной тревоги (только в ряде случаев используют самоконтроль в виде самотестирования ЧЭ и извещателей, которые проводят по истечению заданного времени или циклов работы [4]);
- недостаточно эффективное использование современных цифровых методов обработки сигналов, обеспечивающих повышение сигнализационной надежности ЧЭ и извещателей (обработку данных и сигналов, если и используют, то после сбора информации от извещателей по каналам связи (проводным или беспроводным), которые не обладают требуемыми показателями помехоустойчивости, из-за чего растет неопределенность при принятии решений);
- отсутствие способов групповой обработки данных и сигналов однотипных и разнотипных ЧЭ и извещателей.
Также к одному из существенных недостатков существующих способов обработки сигналов ТСО следует отнести ориентацию на обработку сигналов и информации, сосредоточенную в одном месте (в центре сбора и обработки (ЦСО), который, как правило, одновременно является и центром анализа и принятия решений). У такого подхода есть множество недостатков, в том числе, связанных со значительным увеличением объемов собираемой и передаваемой информации в ЦСО. Кроме того, он является препятствием к реализации и расширенному использованию адаптивных принципов построения ТСО, ориентированному на извещатели со свойствами искусственного интеллекта (интеллектуальные извещатели, которые широко рекламируют их изготовители).
Но только распределенная обработка сигналов и получаемой при этом информации приближает существующие ТСО и их перспективные разрабатываемые аналоги к уровню адаптивных и интеллектуальных.
В соответствии с предложениями, изложенными в заявке на изобретение, она должна быть реализована на уровне одиночных однотипных извещателей и всей их совокупности (групп однотипных извещателей), а также при сборе сигналов и информации, комплексировании данных, полученных от извещателей, и на конечном этапе при обработке, выполняемой с целью информационной поддержки принятия решений. Существующая практика показывает, что на ЧЭ и формируемые сигналы извещателей, наиболее часто использующихся при ТСО незаградительного типа и относящихся к классу сейсмических датчиков, сенсоров или извещателей, оказывает существенно большее влияние по сравнению с воздействием, вызываемым человеком-нарушителем, проезд на относительно небольшом удалении от охраняемой территории различных транспортных средств, в особенности железнодорожного транспорта. В результате этого, проход запрещенной зоны нарушителем оказывается незамеченным, если он по времени совпадает с проездом железнодорожного транспорта, удаленного от места прохода нарушителя на сотни метров. Автомобильные дороги могут проходить также на малом расстоянии от зоны охраны, измеряемом десятками метров, при этом проезд тяжелогруженого автомобиля способен вызвать реакцию тех же сейсмических датчиков, сенсоров и извещателей, которая по используемым показателям сигнальных признаков значительно превышает их отклик на проход человека-нарушителя. В итоге, несмотря на наличие ТСО, по-прежнему, основной труд по определению фактов нарушения охраняемых объектов и границ должны выполнить тревожные группы охраны и обороны.
Поэтому одно из основных требований, которые предъявляются к создаваемым ТСО, заключается в обеспечении высокой вероятности определения факта нарушения контролируемой территории при охране важных объектов, зон охраны границ и большого времени между ложными тревогами. Многие из таких требований не могут быть обеспечены при существующих способах охраны рубежей важных объектов и границ. Основная причина этого заключается в следующем:
- в отсутствии возможности самоконтроля надежности функционирования ЧЭ, извещателей, невозможность обеспечения требуемых показателей помехоустойчивости систем сбора информации и устройств принятия решений о формировании сигналов тревоги, из-за чего существующие и разрабатываемые извещатели имеют низкую сигнализационную надежность;
- в невозможности выделения сигналов о нарушении охраняемых периметров, зон и границ на фоне маскирующих помех естественного происхождения и искусственно формируемых в условиях информационно-технических воздействий (ИТВ) и радиоэлектронного противоборства;
- в отсутствии методов и аппаратно-программных средств обработки сигналов и формируемой информации, обладающих свойствами адаптации (приспособления) к изменяющимся внешним условиям эксплуатации и помехам различного происхождения, приводящим, в итоге, к снижению вероятности обнаружения фактов нарушения контролируемой территории при охране рубежей важных объектов и границ, а также к уменьшению временных интервалов между сообщениями ложной тревоги.
Также общий недостаток существующих систем телемеханики, используемых, в том числе и для охраны объектов, заключается в том, что недостаточно внимания уделено использованию многих прогрессивных технических решений, активно развивающихся в смежных областях. Так, например, телеметрия, используемая при испытаниях и штатной эксплуатации летательных аппаратов (ЛА) ([5], Современная телеметрия в теории и на практике / Учебный курс, Спб.: Наука и Техника, 2007. - 672 с.) ближе всего по используемым принципам формирования, передачи и обработки информации к телемеханике. С телемеханики и начиналось ее развитие, однако быстро развивающиеся способы повышения эффективности систем телеизмерений, относящихся к телеметрии летательных аппаратов (ЛА), не используют для совершенствования телемеханики ТСО и определения перспектив их развития.
При этом в качестве доводов приводят следующие основные оправдания существующего изолированного пути развития средств, систем и комплексов телемеханики: 1) малое число извещателей, датчиков и сенсоров, которые используют при охране рубежей важных объектов, границ и территорий, по сравнению с радиотелеметрией, используемой, например, при обеспечении испытаний ракетно-космической техники (РКТ) и, соответственно, сравнительно небольшие объемы данные, которые при этом передают; 2) специфические особенности борьбы с помехами, искажающими результаты телеизмерений; 3) необходимость упрощения системы телесигнализации для уменьшения ее стоимости.
На самом деле современные требования к техническим системам охраны важных объектов и территорий предполагают необходимость использования большого количества извещателей, в том числе и временно устанавливаемых для заблаговременного оповещения о нападении противника, в том числе и разбрасываемых с использованием различных средств на наиболее опасных направлениях возможного его движения. Современные достижения в области системотехники позволяют существенно упростить их изготовление, а, следовательно, и стоимость. При этом расширенное использование при создании современных ТСО программируемых интегральных схем, микроконтроллеров и микропроцессоров создает основу для реализации программными методами современных методов распределенной цифровой обработки сигналов и формируемых данных. Благодаря этому появились и миниатюрные извещатели, получившие название «умная пыль». Таким образом, основа для внедрения современных методов распределенной цифровой обработки сигналов и формируемых данных уже создана. В результате появилась реальная возможность для реализации на практике многих перспективных программ развития науки и техники в области радиоэлектроники, телеизмерений и передачи информации. В их числе «Программно-определяемое радио» и «Когнитивное радио», одно из основных положений которых заключается в том, чтобы уменьшить требования к номенклатуре используемых технических средств и модернизации существующих ТСО за счет совершенствования их специального программно-математического обеспечения (СПМО). Однако для этого необходимо разрабатывать новые прикладные математические методы обработки цифровых сигналов и получаемых при этом данных. Существующих методов недостаточно для реализации перспективных программ совершенствования систем телеизмерений, телесигнализации и ТСО, в целом.
Кроме того, извещатели, используемые при создании ТСО, ориентированы на различные физические принципы обнаружения нарушителей, количества и состава вооружения, в связи с чем особую актуальность приобретают вопросы их комплексирования в единую информационно-измерительную систему.
В существующей радиотелеметрии, используемой при испытаниях ЛА, значительные успехи были достигнуты в одной из основных задач комплексирования датчиков, использующих различные физические принципы телеизмерений, в единую информационно-измерительную систему. Она заключалась в формировании единой структуры их данных вне зависимости от того, какие сигналы при этом формируют различные датчики.
В ТСО этого нет, поэтому приходится работать с различными сигналами: 1) у сейсмических извещателей - это знакопеременные сигналы, в большинстве случаев «синусоидальные»; 2) другие извещатели на своем выходе формируют импульсные сигналы различной формы, в том числе и с размытыми фронтами, неопределенность границ которых увеличивается в условиях помех. Из-за этого появляются значительные сложности при обработке информации и принятии решений о выдаче тревожного сообщения.
Перед современными средствами, системами и комплексами, используемыми для оперативно-технической охраны важных объектов и границ, стоит не менее сложная, по сравнению с радиотелеметрией обеспечения испытаний ЛА, проблема борьбы с помехами и различными воздействиями, в том числе и создаваемыми преднамеренно.
Кроме того, один из основных недостатков существующих и разрабатываемых ТСО заключен в низких показателях сигнализационной надежности извещателей, которые они демонстрируют в реальной обстановке при наличии помех. В их числе: естественные помехи, создающие шумовой фон, а также воздействия, оказываемые проездом транспортных средств вблизи рубежей охраны важных объектов и границ. Для борьбы с ними недостаточно используются адаптивные принципы телеизмерений, обработки полученной информации и принятии решений о выдаче тревожного сообщения.
Известны способы адаптации средств телеизмерений к изменяющимся внешним условиям и помехам ([6], патент RU №2571584 С1, опубл. 10.10.2015, бюл. №35: «Способ передачи телеметрической информации, адаптированный к различным ситуациям, проявляющимся при проведении испытаний ракетно-космической техники, и система для его осуществления»; ([7], патент RU №2480838 С1, опубл. 25.04.2013, бюл. №21 - 16 с.: «Способ передачи ТМИ, адаптированный к неравномерности потока данных телеизмерений, и система для его осуществления»), которые можно по используемым принципам адаптации разделить на два основных типа. Первый наиболее распространенный среди них предполагает наличие в составе датчиков, сенсоров и извещателей средств контроля различных воздействий, в том числе и помех, определяющих их влияние на формируемые информационные параметры и сигналы. Результаты выполненного ими анализа воздействий и вызываемых ими помех используют затем в устройствах принятия решений по изменению параметров настроек сигналов датчиков, например, частоты их дискретизации. Иначе говоря, такой подход требует создания специальной системы мониторинга, которая бы контролировала применение специальных воздействий и внешних условий эксплуатации.
Один из известных способов, использующий первый тип адаптации, - это ([6], патент RU №2571584 С1, опубл. 10.10.2015, бюл. №35: «Способ передачи телеметрической информации, адаптированный к различным ситуациям, проявляющимся при проведении испытаний ракетно-космической техники, и система для его осуществления»). Его принципиальное отличие от других адаптивных систем телеизмерений заключается в том, что «…в реальном масштабе времени на основе показателей достоверности априорного выбора частот опроса телеметрируемых параметров, который производят на основе определения текущего уровня соответствия между контролируемыми физическими процессами и формируемыми в результате дискретизации их по времени первичными телеметрическими сигналами, отображающими телеметрируемый параметр, осуществляют его мониторинг с определением оценки дисперсии случайной помехи, присутствующей в телеизмерениях, по результатам мониторинга для каждого из контролируемых телеметрируемых параметров принимают решение либо об увеличении частоты его опроса, либо о его понижении до ранее принятых частот (временных интервалов опроса) в зависимости от того превышают ли определяемые оценки текущей дисперсии установленных для каждого из телеметрируемых параметров пороговых значений или нет».
Технический результат способа [6] заключается в изменении частоты опроса датчиков, применительно к ТСО - извещателей, в зависимости от изменившихся условий телеизмерений.
Однако использование специально сконструированной системы мониторинга не всегда возможно, в том числе и по экономическим соображениям.
Известны способы адаптации к изменяющейся ситуации и помехам при передаче и приеме информации, в которых отсутствует система мониторинга состояния системы телеизмерений и радиоканала передачи данных ([7], патент RU №2480838 С1, опубл. 25.04.2013, бюл. №21 - 16 с.: «Способ передачи ТМИ, адаптированный к неравномерности потока данных телеизмерений, и система для его осуществления»).
Технический результат способа [7] заключается в реализации основных принципов адаптации телеметрических систем, проявляющихся в обеспечении возможностей мониторинга без использования специальных технических средств. При этом данные, необходимые для мониторинга, извлекают из получаемых сообщений, для чего используют способы специальных структурно-алгоритмических преобразований, обеспечивающих возможность получения дополнительной информации в условиях различных ограничений. К числу последних относят следующие ограничения: на разрядность представления данных телеизмерений и формирования структур цифровых групповых сигналов; на частоты опроса контролируемых параметров при сохранении точностных характеристик результатов измерений; на спектрально-энергетические показатели каналов связи; на время получения и передачи измерительной информации в условиях различного рода помех. Основу достижения технического результата составляют следующие возможности способа [7]: 1) сжатого представления результатов телеизмерений в групповом сигнале при нетрадиционном представлении данных образами-остатками; 2) замены несодержательной информации, в том числе и проявляющейся в виде «холостых» слов, на избыточные символы помехоустойчивых кодов; 3) изменения частот опроса информационно-значимых телеметрируемых параметров и разрядности представления результатов телеизмерений; 4) замены существующих синхросигналов на составные шумоподобные кодовые конструкции двойного назначения, обеспечивающие не только высокую помехоустойчивость системы синхронизации, но и передачу информации о смене режимов представления и передачи измерительной информации.
При этом вместо традиционного позиционного кодирования данных и сигналов Xj, используют нетрадиционное их представление. Его обеспечивают путем нетрадиционного представления данных и сигналов Xj, их образами-остатками b1j и b3j, получающимися в результате операций, эквивалентных делению значений Xj на определенным образом выбранные модули сравнения m1 и m3, соответственно:

где Xj - сформированное в исходном виде j-тое слово-измерение (сообщение);
m1, m3 - модули сравнения, если n - половина исходной разрядности N=2n (разрядной сетки) представления исходных традиционных слов-измерений, то случай оптимального их выбора представлен значениями m1=2n-1, m3=2n+1, что связано с выполнением известного алгебраического тождества: m1×m2=(2n-1)(2n+1)=22n-1;
b1j, b3j - образы-остатки слова-измерения (сообщения) Xj, полученные в результате операции деления Xj на модули сравнения m1 и m3, соответственно.
Отсутствие в приведенной записи (1) модулей сравнения m1 и m3, а также их образов-остатков b1j, b3j с индексами, равными 1 и 3, определено тем, что существуют еще остатки по модулю m2=2n, которые для придания логической стройности изложения обозначают, как b2j. Присущая им особенность заключается в следующем: определение образов-остатков b2j.(mod m2) основано на свойствах традиционного позиционного представления сообщения Xj и связано с условным его делением на старшее (аст) и младшее (амл) полуслова или другие сегменты представления Xj традиционным позиционным кодом: <Xj>2↔<аст<амл>2. Если цифровые слова или сообщения <Xj>2 представлены N=2n - разрядным двоичным кодом, то полуслова аст и амл имеют n - разрядное позиционное представление двоичным кодом. При этом младшее полуслово <амл>2 представляет собой образ-остаток <b2j>2:<амл>2.=<b2j>2. Поэтому к системе сравнений на основе образов-остатков b1j и b3j может быть добавлено дополнительное сравнение b2j.(mod m2), которое получают на основе выделения младшего полуслова <амл>2 из исходного или восстановленного значения сообщения или выборки цифрового сигнала <Xj>2.
При предлагаемом дополнительном кодировании цифровых сигналов извещателей, используемых для последующей распределенной обработке и передаче по каналам связи с ошибками, новые сообщения получают в результате замены исходных значений Xj, j=0,1,2,3,… на сообщения Cj, j=0,1,2,3,…, составленные, например, из значений образов-остатков

Здесь подстрочные индексы s (< >10 и < >2) определяют систему счисления - десятичную и двоичную, соответственно.
Например, если первое значение слова-измерения равно: X1=<116>10=<01110100>2 при восьмиразрядном представлении двоичного кода (2n=8), то при модулях сравнения mod 15 и mod 17 результатом дополнительного помехоустойчивого кодирования будет значение С1↔b11(mod 15), b21(mod 17)>s, s=2,10. В рассматриваемом случае это значение  . Первый подчеркнутый образ-остаток равен:
. Первый подчеркнутый образ-остаток равен:  , что соответствует результату деления значения 116 на модуль сравнения 15: 116=15×7+11. Второй четырехразрядный образ-остаток (n=4) b21=<1110>2=<14>10, что соответствует результату деления значения 116 на модуль сравнения 17: 116=17×6+14.
, что соответствует результату деления значения 116 на модуль сравнения 15: 116=15×7+11. Второй четырехразрядный образ-остаток (n=4) b21=<1110>2=<14>10, что соответствует результату деления значения 116 на модуль сравнения 17: 116=17×6+14.
Таким образом, при традиционном способе представления сигналов извещателей и передачи сформированных данных значению Xj может быть поставлен в полное соответствие его эквивалент в виде:  или в виде:
или в виде:  , где m1, m3 - модули сравнения, a
, где m1, m3 - модули сравнения, a  - значения неполных частных, получающихся при делении.
- значения неполных частных, получающихся при делении.
При представлении данных их образами-остатками (2) передаче подлежат только значения b1j и b3j, при этом информация о m1, m3 и о из передачи исключается. В этом случае m1, m3 могут рассматриваться как ключевые данные, известные пользователю, а , как данные, которые восстанавливают при приеме на основе принятых значений образов-остатков b1j и b3j.
Результат дополнительного кодирования Cj (2) представляет, таким образом, сжатую форму представления передаваемых данных, поскольку в новых закодированных значениях отсутствует информация о модулях сравнения m1 m3 и «неполных частных» , равных, например, при m1=15 и m3=17,  и
и  , соответственно. При традиционном кодировании информация о m1=15 и m3=17 и о «неполных частных» и присутствует в неявном виде. Теория конечных полей Э. Галуа утверждает, что информация о «неполных частных»
, соответственно. При традиционном кодировании информация о m1=15 и m3=17 и о «неполных частных» и присутствует в неявном виде. Теория конечных полей Э. Галуа утверждает, что информация о «неполных частных»  может быть восстановлена при условии, что выбранные модули сравнения m1 и m3 не будут иметь других совместных делителей, кроме 1((m1,m3)=1) ([8], И.М. Виноградов «Основы теории чисел», М.: Наука, 1972 г.). Поэтому результат кодирования с использованием предлагаемого алгоритма (2) обладает следующими сущностными признаками:
может быть восстановлена при условии, что выбранные модули сравнения m1 и m3 не будут иметь других совместных делителей, кроме 1((m1,m3)=1) ([8], И.М. Виноградов «Основы теории чисел», М.: Наука, 1972 г.). Поэтому результат кодирования с использованием предлагаемого алгоритма (2) обладает следующими сущностными признаками:
- он может быть «безызбыточным» за счет того, что разрядность представления дополнительно закодированных данных Cj остается, в основном, неизменной и равной, например, 2n=8, 2n=10 или 2n=12, но, с другой стороны, за счет сжатой формы представления данных с исключением информации о модулях сравнения m1 m3 и «неполных частных» , создана дополнительная внутренняя избыточность данных цифровых сигналов датчика, сенсора или извещателя, что, в итоге, приводит к повышению информационной нагрузки каждого двоичного символа;
- увеличено в 2n+1 раз минимальное кодовое расстояние (dmin) между соседними значениями телеизмерений или цифровых сигналов извещателей, благодаря чему обеспечена возможность обнаружения и исправления ошибок передачи данных по каналам связи в условиях помех, в том числе и искусственно создаваемых.
Эффект увеличения минимального кодового расстояния (dmin) можно пояснить на следующем примере.
Если взять соседние значения данных телеизмерений для случая 2n=8, например, X1=<115>10=<01110011>2 и Х2=<116>10=<01110100>2, то при традиционных способах их представления кодовое расстояние между ними будет равно  . При этом в соответствии с теорией помехоустойчивого кодирования отсутствует возможность обнаружения ошибок передачи цифровых сигналов и информации ([9], Зюко А.Г. Помехоустойчивость и эффективность систем связи. - М.: Связь, 1972. - 360 с.).
. При этом в соответствии с теорией помехоустойчивого кодирования отсутствует возможность обнаружения ошибок передачи цифровых сигналов и информации ([9], Зюко А.Г. Помехоустойчивость и эффективность систем связи. - М.: Связь, 1972. - 360 с.).
При кодировании выбранных значений в соответствии с алгоритмом (2) и использовании модулей сравнения m1=15 и m2=17, получим:  и
и  . В результате минимальное кодовое расстояние увеличилось в k=2n+1 раз и стало при n=4 равным
. В результате минимальное кодовое расстояние увеличилось в k=2n+1 раз и стало при n=4 равным  . В результате этого обеспечивается возможность обнаружения и исправления ошибок передачи данных телеизмерений извещателя. Увеличение минимального кодового расстояния (dmin) в 17 раз в соответствии с теорией помехоустойчивого кодирования обеспечивает возможность исправления до 4 ошибок передачи данных телеизмерений извещателя ([9]).
. В результате этого обеспечивается возможность обнаружения и исправления ошибок передачи данных телеизмерений извещателя. Увеличение минимального кодового расстояния (dmin) в 17 раз в соответствии с теорией помехоустойчивого кодирования обеспечивает возможность исправления до 4 ошибок передачи данных телеизмерений извещателя ([9]).
Сформированные образы-остатки b1j (mod m1), b2j (mod m2) и b3j (mod m3), а также результаты дополнительного экономного помехоустойчивого кодирования Cj в предлагаемом изобретении используют, наряду с существующими традиционными способами представления сигналов датчиков, сенсоров и извещателей позиционным двоичным кодом Xj, для дополнительного решения задач повышения их сигнализационной надежности, а также для распараллеливания и упрощения обработки сформированных данных. Например, многие из существующих задач фильтрации данных более эффективно могут быть решены при переходе от традиционного представления сообщений Xj к их представлению образами-остатками b1j (mod m1), b2j (mod m2) и b3j (mod m3).
Основу расширенного применения предлагаемого способа составляет математическая модель преобразований значений сигналов Xj, формируемых извещателями, которая определяется следующей системой сравнений ([10] (Кукушкин С.С. Теория конечных полей и информатика: том. 1 Методы и алгоритмы, классические и нетрадиционные, основанные на использовании конструктивной теоремы об остатках - М: МО РФ, 2003. - 281 с., с. 38-43)):

где m1=2n-1, m2=2n, m3=2n+1 - оптимально выбранные модули сравнения, а n - половина разрядности представления исходных традиционных слов-измерений (это означает, что если разрядность двоичного кода слов-измерений или сообщений Xj равна 2n, то оптимально сформированные образы-остатки будут иметь n - разрядную позиционную структуру представления). При этом дополнительные модули сравнения  - это модули, которые появляются в результате разложения m1=2n-1 и m3=2n+1 на дополнительные сомножители, например: m11=2n/2-1 и m13=2n/2+1. Так, в случае исходного байтового представления слов-измерений (2n=8) m1=24-1=15, m11=24/2-1=3, a m13=24/2+1=5. Если 2n=10, то m3=25+1=33. Он также может быть представлен в виде следующих сомножителей: m31=3 и m32=11. При этом возможности для дополнительного разложения модулей на составные модули существенно увеличивают при выборе числа разрядов N=2n=12. В этом случае (n=6) и оптимальные исходные модули сравнения m1=2n-1=63=7×9 и m3=2n+1=65=5×13.
- это модули, которые появляются в результате разложения m1=2n-1 и m3=2n+1 на дополнительные сомножители, например: m11=2n/2-1 и m13=2n/2+1. Так, в случае исходного байтового представления слов-измерений (2n=8) m1=24-1=15, m11=24/2-1=3, a m13=24/2+1=5. Если 2n=10, то m3=25+1=33. Он также может быть представлен в виде следующих сомножителей: m31=3 и m32=11. При этом возможности для дополнительного разложения модулей на составные модули существенно увеличивают при выборе числа разрядов N=2n=12. В этом случае (n=6) и оптимальные исходные модули сравнения m1=2n-1=63=7×9 и m3=2n+1=65=5×13.
Достигаемая при этом дополнительная техническая сущность предлагаемого способа заключается в том, что вместо существующей внешней структуры представления исходных данных Xj (Sвнеш), представленной при разрядной сетке представления цифровых сигналов и данных N=2n=8 последовательностью закодированных сообщений Cj↔<b1j (mod 15), b3j (mod 17)>s, s=2,10, имеющую ненаблюдаемую при технической разведке внутреннюю структуру (Sвнутр), принятую для передачи и общения. При этом сформированные внутренние структуры сигналов и данных Sвнутр вкладывают во внешние структуры Sвнеш без дополнительных информационных признаков на основе принятых соглашений между передающей и приемной сторонами.
Возможности комплексного разрешения существующих многочисленных противоречий при создании ТСО обеспечивает предлагаемый способ оперативно-технической охраны рубежей объектов и границ.
По основному п. 1 формулы изобретения предлагаемый способ заключается в том, что в зоне охраны, являющейся одновременно и передающей стороной при обнаружении техническими средствами охраны нарушителей, размещают в определенном порядке извещатели, использующие, в том числе и различные физические принципы обнаружения нарушителей, обеспечивают сбор сигналов, формируемых извещателями, а на приемной стороне осуществляют обработку собранных сигналов и полученных данных и на основе последующего их анализа формируют сообщение тревоги. От известных аналогов он отличается тем, что сигналы извещателей, использующие различные физические принципы обнаружения нарушителей и имеющие различную форму аналогового представления, в том числе и биполярную, подвергают не сосредоточенной, осуществляемой при принятии решения о выдаче сообщения тревоги, а распределенной предварительной обработке и фильтрации с элементами адаптации к различным условиям их применения и реализуемого при этом искусственного интеллекта, способствующего увеличению информационных признаков нарушений, в том числе и без усовершенствования существующих технических средств охраны и увеличения их количества, при этом в результате каждого этапа распределенной обработки сигналов извещателей формируют предварительные сообщения тревоги, информационную значимость которых повышают при каждом очередном этапе распределенной обработки, для чего на различных (i) этапах получения сигналов извещателей и их распределенной обработки, осуществляемой как последовательно, так и параллельно, по полученным данным параллельной распределенной обработки, осуществляемой на различных (i) этапах получения данных обработки с использованием различных алгоритмов обнаружения нарушителя, формируют обобщенный результат с оценками его достоверности, используют последовательность проблемно-ориентированных структурно-алгоритмических преобразований (САП-i), имеющих условную нумерацию i=1,2,3,4,…, осуществляемых по отношению к сигналам и формируемым данным, как на выходе извещателей, в том числе и использующих различные физические принципы обнаружения факта нарушений, так и в других информационных сечениях подготовки принятия решения, включающих в себя, как существующие, так и разрабатываемые системы сбора и формирования сообщений тревоги, которые классифицируют как предварительные сообщения, требующие дополнительного подтверждения их достоверности на заключительном этапе анализа в центре обработки информации для обеспечения выполнения заданных требований, относящихся: 1) к показателям помехоустойчивости и сигнализационной надежности извещателей, систем сбора и обработки информации; 2) к показателям достоверности формируемых ими сигналов, 3) к вероятности обнаружения нарушителя и 4) к достижению заданных временных интервалов между сигналами ложной тревоги, при этом выполнение заданных требований обеспечивают, в основном, на основе программно-математических способов, не требующих реконструкции аппаратной части существующих технических средств охраны, на основе использования программно реализуемых структурно-алгоритмических преобразований (САП-i), i=1,2,3,4,…, получаемые при этом результаты одновременно используют по дополнительному назначению - для самоконтроля технического состояния и контроля достоверности сигналов, формируемых извещателями, а также для повышения их защищенности от помех, информационно-технических воздействий и несанкционированного доступа, для чего формируют не только внешние (Sвнеш), традиционно используемые, но и внутренние (Sвнутр), структуры или сигнатуры представления сигналов извещателей и формируемых данных, информационные признаки разделения и выделения которых известны только получателю и отсутствуют в передаваемой информации.
Суть предлагаемого способа и его сущностные характеристики раскрывают последующие пункты формулы изобретения (п. 2 - п. 10).
2. Способ по п. 1, отличающийся тем, что проблемно-ориентированные структурно-алгоритмические преобразования первого этапа (САП-1), входящие в состав (САП-i), i=1,2,3,4…, имеют следующее основное целевое предназначение: уменьшение интенсивности помехового фона путем исключения из него низкочастотной и высокочастотной составляющих, которые по природе их физического происхождения не могут быть в составе информационного сигнала извещателей и представления формируемых сигналов в унифицированной однополярной импульсной форме, для чего используют фильтры низкочастотной и высокочастотной составляющих, преобразование полученного сигнала с формированием квадратурных его форм в виде квадратурных составляющих исходного сигнала извещателя, преобразование Гильберта и/или выпрямление биполярных сигналов с представлением полученных результатов виде однополярного импульсного сигнала, при этом результаты приведения различных форм сигналов извещателей, в том числе и применяющих различные физические принципы их формирования, к унифицированной импульсной форме их представления, используют для обеспечения возможности наиболее простой и унифицированной реализации технических средств охраны, систем сбора и обработки сформированных сигналов, включая и используемые в настоящее время технологии сравнения сформированных импульсных сигналов с устанавливаемыми и регулируемыми при изменении условий эксплуатации уровнями ограничений, превышение которых служит предварительным признаком нарушения рубежей охраны важных объектов и границ, при этом полученные сигналы используют для предварительной идентификации способа преодоления зоны охраны: дискретный импульсный сигнал с продолжительными перерывами, как характеристику толчкового способа пересечения шагом и бегом, а с импульсным сигналом с малыми по времени паузами между ними отождествляют способ нарушения с использованием колесных транспортных средств, минимизирующих толчковые воздействия на почву зон охраны.
3. Способ по п. 1, отличающийся тем, что на втором этапе использования распределенных САП (САП-2), входящих в состав (САП-i), i=1,2,3,4…, последовательность импульсных сигналов, сформированную каждым из однотипных извещателей, инвертируют и сдвигают относительно исходной на время Δτk, равное половине предполагаемого времени Тпрk, которое потребуется для пересечения нарушителем охраняемого участка территории или зоны охраны, на которой установлены извещатели технических средств охраны (Δτk≈1/2Тпрk), которую затем суммируют с исходной последовательностью импульсных сигналов, результаты суммирования дифференцируют для дополнительного подавления шумового и помехового фона, в результате чего повышают соотношение сигнал/шум и сигнал/(шум + помеха), а задержкой Δτk, которая может изменяться при повторе приведенных операций обработки, включая возможность параллельной обработки с различными значениями Δτk, соответствующими определенным признакам нарушений, которые были получены на предварительном этапе обучения адаптивных и интеллектуальных технических средств охраны, на основе чего вводят дополнительный информационный признак - Δτk, позволяющий отличить факт пересечения охраняемого участка территории, на которой установлены извещатели технических средств охраны, от других помех, вызванных при использовании сейсмических пьезоэлектрических извещателей и геофонов падением веток, камней, снежных комков, проездом транспортных средств вблизи от охраняемой территории и важных объектов, влиянием дождей и ливней на радиолучевые технические средства охраны, сформированный при этом дополнительный информационный признак Δτk и время Ти превышения импульсным сигналом установленного для него одного или нескольких пороговых уровней, в том числе и выставленных одновременно для идентификации различных событийных явлений, используют для классификации предполагаемого нарушения - одиночного, группового, определения предполагаемого способа преодоления охранной зоны - на транспорте, бегом, шагом, ползком, перекатом.
4. Способ по п. 1, отличающийся тем, что на третьем этапе использования распределенных САП (САП-3), входящих в состав (САП-i), i=1,2,3,4…, осуществляют групповую обработку имеющегося множества извещателей одного типа, составляющих линейку или линейки извещателей, для дополнительного уменьшения уровня помех и систематических погрешностей телеизмерений, в том числе, и вызванных такими воздействиями, которые приводят к превышению установленных пороговых уровней у всех или у подавляющего большинства извещателей одного типа, что имеет место в результате воздействий, оказываемых мощными силовыми электрически установками, находящимися вблизи от зоны охраны, проездом железнодорожного и автомобильного транспорта, в результате чего обеспечивают наблюдение нарушений зоны охраны на фоне маскирующих помех или специально сформированных информационно-технических воздействий; по полученным данным принимают решение о выдаче сообщения предварительной тревоги на основе учета индивидуальной и групповой обработки данных извещателей одного типа, сформированные по каждому типу извещателей сообщения предварительной тревоги передают по каналам связи в систему сбора данных различных типов извещателей, на основе которых формируют сообщение тревоги более высокого уровня значимости, которое передают совместно с данными самоконтроля работоспособности извещателей и данными, предназначенными для подтверждения достоверности полученной информации, а также для обеспечения дополнительной идентификации и верификации событий в центре принятия решений.
5. Способ по п. 1, отличающийся тем, что сформированные импульсные сигналы, имеющие аналоговую форму представления, в том числе и после выполненных структурно-алгоритмических преобразований первого этапа (САП-1), преобразуют в унифицированный цифровой N - разрядный код (N=2n), для чего выбирают частоту формирования его значений в соответствии с теоремой В.А. Котельникова, исходя из требуемой точности восстановления исходного аналогового сигнала извещателей, применяют очередные структурно-алгоритмические преобразования четвертого этапа (САП-4), входящие в состав (САП-i), i=1,2,3,4 и предназначенные для самоконтроля функционирования извещателей и оценивания достоверности формируемых ими сигналов по определяемым сигнатурным признакам, повышения защищенности сформированных цифровых сигналов и данных от помех, информационно-технических воздействий и несанкционированного доступа, для чего используют нетрадиционное представление значений цифрового сигнала <Xj>2 в виде дополнительного кодирования его значений экономным безызбыточным или малоизбыточным помехоустойчивым кодом <Cj>2↔<<b1j>2, <b3j>2>2, где < >2 - символ представления сигналов и данных двоичным кодом, <b1j>2 и <b3j>2 - образы-остатки, полученные от деления исходных значений данных, слов-измерений или сообщений Xj на модули сравнения m1=2n-1 и m3=2n+1, соответственно, в результате чего формируют внутреннюю структуру данных (Sвнутр), которой заменяют традиционно используемую внешнюю структуру данных (Sвнеш), для доступа к которой и для обеспечения контроля достоверности принятых данных технических средств охраны разделяют полученные в результате дополнительного экономного помехоустойчивого кодирования и принятые после их передачи по каналам связи N - разрядные двоичные данные, слова-измерения или сообщения <Cj>2 (N=2n) на n-разрядные составные части меньшей разрядности, представляющие собой их образы-остатки <b1j>2 и <b3j>2, образующие внутреннюю структуру сформированных цифровых сигналов и данных (Sвнутр).
6. Способ по п. 1, отличающийся тем, что при следующей по порядку унификации представления цифровых сигналов для обеспечения возможности использования всего динамического диапазона представления значений сформированных импульсов Шкод=(0-(2N-1)), определяемого выделенной разрядной сеткой (N) кодирования, и исключения влияния эффекта «зашкаливания» значений сигналов извещателей, преобразованных в цифровую форму, на результаты оценивания энергетического признака нарушений, преобразуют последовательность данных измерений извещателей <Xj>2, где j=1,2,3,… - счетное множество дискретных отсчетов импульсного сигнала, представленного в цифровой форме, а < >2 - символ представления данных двоичным кодом, в экономный безызбыточный или малоизбыточный помехоустойчивый код системы остаточных классов: <Cj>2↔<<b1j>2, <b3j>2>2, где <b1j>2 и <b3j>2 - образы-остатки, полученные от деления исходных значений данных, слов-измерений или сообщений Xj на модули сравнения m1=2n-1 и m3=2n+1, соответственно, устанавливают пороговые уровни срабатывания для выбранной модели обнаружения нарушителя и используемого типа цифрового исходного <Xj>2 и/или преобразованного кода <Cj>2, превышение которых рассматривают в качестве первичных сигнальных признаков нарушения зоны охраны, на основе сравнений значений цифровых импульсных сигналов с установленными пороговыми уровнями определяют информационные признаки нарушения рубежей охраны важных объектов и границ, к числу которых, прежде всего, относят: 1) время превышения сформированным импульсным сигналом установленного порогового уровня; 2) крутизну его фронтов; 3) интегральный энергетический показатель в виде площади импульса, выходящего за пределы порога ограничения; на втором и третьем этапах распределенных САП используют следующие проблемно-ориентированные структурно-алгоритмические преобразования (САП-2 и САП-3) импульсного сигнала, сформированного каждым из извещателей, обеспечивающие возможность дополнительного самоконтроля их технического состояния, оценки достоверности формируемых сообщений тревоги и предназначенные для достижения следующих сущностных характеристик: дополнительного повышения соотношения сигнал/шум и сигнал/(помеха + шум), устойчивости к помехам различного происхождения, в том числе и создаваемым в условиях радиоэлектронного противоборства, к изменяющимся условиям эксплуатации, информационно-техническим и климатическим воздействиям.
7. Способ по п. 1, отличающийся тем, что для самоконтроля технического состояния и контроля достоверности сигналов, формируемых извещателями, а также для повышения их защищенности от помех, информационно-технических воздействий и несанкционированного доступа используют структурно-алгоритмические преобразования четвертого этапа (САП-4), связанные с нетрадиционным представлением значений цифрового сигнала <Xj>2 в виде дополнительно кодирования его значений экономным безызбыточным или малоизбыточным помехоустойчивым кодом <Cj>2↔<<b1j>2, <b3j>2>2, где <b1j>2 и <b3j>2 - образы-остатки, полученные от деления исходных значений данных, слов-измерений или сообщений Xj на модули сравнения m1=2n-1 и m3=2n+1, соответственно, для чего используют два типа декодирования экономного безызбыточного или малоизбыточного помехоустойчивого кода <Cj>2, называемых «жесткое» и «мягкое», осуществляют их восстановление с использованием универсального алгоритма «жесткого» декодирования, обеспечивающего восстановление в исходном виде  с привнесенными каналом связи ошибками
с привнесенными каналом связи ошибками  , где <Xj>2 - истинные значения переданной последовательности данных (j=1,2,3,… - счетное множество, определяющее условную нумерацию данных, слов-измерений или сообщений, содержащихся в цифровом групповом сигнале или пакете данных независимо от свойств наличия или отсутствия их корреляционной взаимосвязи и на основе работающего под его управлением алгоритма «мягкого» декодирования, обнаруживающего и исправляющего ошибки передачи информации при наличии свойств корреляционной взаимосвязи передаваемых данных, слов-измерений или сообщений.
, где <Xj>2 - истинные значения переданной последовательности данных (j=1,2,3,… - счетное множество, определяющее условную нумерацию данных, слов-измерений или сообщений, содержащихся в цифровом групповом сигнале или пакете данных независимо от свойств наличия или отсутствия их корреляционной взаимосвязи и на основе работающего под его управлением алгоритма «мягкого» декодирования, обнаруживающего и исправляющего ошибки передачи информации при наличии свойств корреляционной взаимосвязи передаваемых данных, слов-измерений или сообщений.
8. Способ по п. 1, отличающийся тем, что для реализации универсального алгоритма «жесткого» декодирования экономного безызбыточного или малоизбыточного помехоустойчивого кода <Cj>2↔<<b1j>2, <b3j>2>2, где <b1j>2 и <b3j>2 - образы-остатки, полученные от деления исходных значений данных, слов-измерений или сообщений Xj на модули сравнения m1=2n-1 и m3=2n+1, определяют разности между значениями образов-остатков Δj=b1j-b3j по модулям сравнения m1 и m3, полученные разности Δj делят на 2; если при разностях равных нулю и больше нуля (Δj≥0) деление выполняется без остатка, то уменьшенные в 2 раза значения разностей (Δj) умножают на один из модулей сравнения (mi) i=1,3, а к полученному результату добавляют соответствующий этому модулю образ-остаток (mi) i=1,3; при разностях меньших нуля (Δj<0), и выполнении условия деления Δj на 2 без остатка, полученные и уменьшенные в 2 раза значения отрицательных разностей Δj суммируют со значением одного из модулей сравнения m1 или m3, а найденные в результате суммирования данные умножают на другой модуль сравнения m3 или m1, при этом его же образ-остаток b1j или b3j, соответственно, добавляют к полученному результату вычислений; при невыполнении условия делимости без остатка разностей Δj между значениями образов-остатков на 2 их складывают с одним из чисел-модулей, полученные при этом значения делят на 2, после чего результат деления умножают на число другого модуля сравнения и к найденным данным добавляют его же образ-остаток, контроль достоверности восстановления обеспечивают при равенстве данных, полученных при замене индексов модулей сравнения и их остатков.
9. Способ по п. 1, отличающийся тем, что при выполнении операций «мягкого» декодирования, предназначенного для обнаружения и исправления ошибок передачи цифровых сигналов и данных находят разрывы, определяющие границы графических фрагментов передаваемых сигналов и данных <Cj>2↔<<b1j>2, <b3j>2>2, где <b1j>2 и <b3j>2 - образы-остатки, полученные от деления исходных значений данных, слов-измерений или сообщений Xj на модули сравнения m1=2n-1 и m3=2n+1, преобразованных на передающей стороне с использованием алгоритмов структурно-алгоритмического преобразования четвертого этапа (САП-4) сигналов и данных, представленных при использовании традиционного позиционного двоичного кода <Xj>2, затем, используя признаки идентификации разрывов <Cj>2 в виде разностей первого порядка между последующими <Cj+1>2 и предшествующими <Cj>2 значениями сигналов и данных, закодированных в результате использования САП-4, определяют те их абсолютные значения, которые попадают в интервал (0,6-1)Шкод, где Шкод - диапазон или шкала представления цифровых сигналов извещателя, равные 2N, где N=2n - число разрядов двоичного кода, используемого для представления слов-измерений и сообщений, принятые с ошибками данные и сигналы <Cj>2, преобразованные на передающей стороне с использованием алгоритма дополнительного экономного помехоустойчивого кодирования, подвергают делению на значение минимального кодового расстояния dmin=2n+1, в результате чего находят целочисленные остатки от деления μj, строят гистограмму распределения их значений ƒгист(μj) и в качестве инварианта, проявляющегося в виде группового значения равноостаточности» (μj=Const) внутри выделенных временных участков, заключенных между соседними разрывами  и
и  , выбирают в сформированной статистической выборке, состоящей из остатков μj, наиболее часто встречающееся значение - моду гистограммы
, выбирают в сформированной статистической выборке, состоящей из остатков μj, наиболее часто встречающееся значение - моду гистограммы  , при этом все другие значения остатков (μj), не совпадающие со значением найденного инварианта
, при этом все другие значения остатков (μj), не совпадающие со значением найденного инварианта  , используют для обнаружения ошибок передачи сигналов или данных, которые исправляют путем подстановки вместо них значений
, используют для обнаружения ошибок передачи сигналов или данных, которые исправляют путем подстановки вместо них значений  .
.
10. Способ по п. 1, отличающийся тем, что для дополнительного контроля достоверности полученных сигналов и данных используют абсолютные разности между значениями одноименных остатков b1j и b3j, представляющих собой внутреннюю структуру закодированных сигналов или данных <Cj>2↔<<b1j>2, <b3j>2>2 первого  и второго
и второго  порядков:
порядков:  и
и  ,
,  , соответственно, а также разности первого и второго порядков между восстановленными в результате декодирования значениями сигнала <Xj>2↔<<a1j>2, <a2j>2>2, где <a1j>2, <a2j>2 - его n-разрядные старшее и младшее полуслова, соответственно, и <a2j>2, представляет собой результат сравнения <b2j>2 по модулю сравнения m2=2n, и разности первого и второго порядков между остатками b2j, получаемыми в результате деления на модуль m2=2n, обеспечение равенств вычисленными всеми значениями первого и второго порядков используют для контроля достоверности полученных результатов в условиях помех и информационно-технических воздействий.
, соответственно, а также разности первого и второго порядков между восстановленными в результате декодирования значениями сигнала <Xj>2↔<<a1j>2, <a2j>2>2, где <a1j>2, <a2j>2 - его n-разрядные старшее и младшее полуслова, соответственно, и <a2j>2, представляет собой результат сравнения <b2j>2 по модулю сравнения m2=2n, и разности первого и второго порядков между остатками b2j, получаемыми в результате деления на модуль m2=2n, обеспечение равенств вычисленными всеми значениями первого и второго порядков используют для контроля достоверности полученных результатов в условиях помех и информационно-технических воздействий.
Иллюстрации, поясняющие суть предлагаемого изобретения, приведены на фиг. 1-24. На фиг. 1-10 представлены сигналы сейсмических пьезоэлектрических и геофонных извещателей, на которых проиллюстрированы основные особенности их формирования и преобразований, осуществляемых с целью повышения их сигнализационной надежности. При этом на фиг. 1 представлены исходные биполярные сигналы сейсмических извещателей-геофонов, характеризующие их реакцию на толчковые воздействия при ходьбе и беге человека. На фиг. 2 представлен вид сигналов сейсмических извещателей: пьезоэлектрического и геофона, характеризующие типовую сигнальную картину их отклика на пересечение человеком пешком зоны охраны (ЗО) в виде отсчетов и амплитудно-частотной характеристики (АЧХ). На фиг. 3 представлены сигналы извещателя-геофона, представленные в виде одпополярных импульсных сигналов, полученных в результате использования алгоритмов структурно-алгоритмических преобразований первого этапа (САП-1) и их характерные особенности, появляющиеся при преодолении ЗО пешком (А) и на автомобиле (Б). В первом (А) случае импульсные сигналы, появляющиеся в результате толчкового воздействия на почву, разделены между собой хорошо видимыми паузами между ними. Во втором случае (Б) паузы фактически отсутствуют. Эту особенность используют в качестве первого информационного признака, позволяющего идентифицировать эти два вида пересечения ЗО. На следующей иллюстрации (фиг. 4) представлены особенности сигнала сейсмического пьезоэлектрического извещателя и его отображения в виде АЧХ при пересечении ЗО пешком (А) и бегом (Б). При этом данные графического отображения отклика извещателя, приведенные на фиг. 4(Б), свидетельствуют об эффекте «зашкаливания» данных измерений. Причина его появления заключается в том, что выделенной разрядной сетки (N=2n) представления сигнала извещателя и диапазона Шкод=(0-(2N-1)) для его однозначного отображения и восприятия метрологической шкалы измерений ШИ не хватает. В существующей радиотелеметрии, используемой при испытаниях летательных аппаратов (ЛА), эффект «зашкаливания» данных телеизмерений, когда ШИ>Шкод, рассматривают как нарушение однозначности между измеренными значениями и их результатами, полученными на выходе аналого-цифровых преобразователей (АЦП). В этом случае полученные данные рассматривают либо как недостоверные, либо, как имеющие пониженные показатели достоверности. В телесигнализации, составляющей основу ТСО, на подобные искажения, проявившиеся на иллюстрации (фиг. 4(Б)), не обращают внимания. Это допустимо, если ТСО работает в условиях отсутствия помех и различных сторонних воздействий. Однако при наличии помех и сторонних воздействиях, мешающих идентификации, появляется необходимость в более точном оценивании энергетического признака нарушений (фиг. 13), но ограниченная выбранной шкалой кодирования Шкод=2N, где N=2n разрядность двоичных слов или сообщений, амплитуда импульсов, формируемых сейсмическими извещателями, этому препятствует. Поэтому при телеизмерениях, используемых для обеспечения летных испытаний летальных аппаратов (ЛА) при использовании известных способов традиционного представления данных двоичным кодом всегда появляется задача оптимального или рационального согласования метрологических шкал измерений (Ши) и выбранной шкалы кодирования (Шкод), определяемой разрядностью (N=2n) представления слов, данных и сообщений двоичным кодом. Шкала измерений (Ши) и шкала кодирования (Шкод), связаны зависимостью:

где kмр=(Umax-Umin)/Шкод - цена младшего разряда двоичного кода,
Umax и Umin - максимальное и минимальное возможное значение контролируемого процесса или параметра, соответственно, установленное для всего множества его реализаций.
Проблема выбора заключается в том, что никто наперед не знает, какие фактические значения Umax и Umin появятся в ходе измерительного эксперимента, а шкалу Шкод, определяемую разрядностью представления двоичных слов (N=2n), необходимо выбрать заранее. Особая сложность этой ситуации заключается в том, что полученные данные телеизмерений, в том числе и искаженные в результате действия помех различного рода или из-за эффекта «зашкаливания», являются уникальными, поскольку исключают возможность повторения измерительного эксперимента.
Для устранения этого основного недостатка используют нетрадиционное представление данных измерений Xj их образами-остатками <<b1j>2, <b3j>2>2, которые составляют основу экономного помехоустойчивого кодирования <Cj>2 (САП-4) ([11], Способ передачи информации, патент RU №2609747, приоритет от 13.08.2017 г.; [12], Способ передачи информации и система для его осуществления», патент RU №2586833, приоритет 15.08.2015 г.; [13], Способ передачи информации и система для его осуществления», патент RU №2586605, приоритет от 22.03.2013 г.). Поэтому практическая потребность в использовании предлагаемых алгоритмов САП-4 появляется на различных этапах получения и распределенной обработки цифровых сигналов извещателей.
На фиг. 5 представлены сигналы линейки сейсмических пьезоэлектрических извещателей, сформированные при пересечении ЗО на автомобиле, а на фиг. 6 отображена общая картина отклика линеек извещателей-геофонов на прохождение нарушителя в различные моменты времени T1 и Т2. На фиг. 7 представлены иллюстрации преобразований биполярного сигнала в однополярный и результаты сглаживания, обеспечивающие приведение исходных сигналов к унифицированной импульсной форме. Решение этой задачи в предлагаемом изобретении обеспечивают алгоритмы структурно-алгоритмических преобразований первого этапа (САП-1). На фиг. 8 представлены эпюры сигналов, поясняющие основные операции последующих структурно-алгоритмических преобразований второго этапа САП (САП-2), где А - иллюстрация исходного сигнала, Б - результат его инвертирования и задержки на время на время Δτk, равное половине предполагаемого времени Тпрk, которое потребуется для пересечения охраняемого участка территории или зоны охраны, на которой установлены извещатели технических средств охраны (Δτk≈1/2Тпрk). На фиг. 8(B) инверсную копию суммируют с исходной последовательностью импульсных сигналов, а полученные результаты суммирования дифференцируют (фиг. 8(Г)) для дополнительного подавления шумового и помехового фона. В итоге, повышают соотношение сигнал/шум и сигнал/(шум + помеха), а задержкой Δτk, которая может изменяться при повторе приведенных операций обработки, включая возможность параллельной обработки с различными значениями Δτk, задают дополнительный информационный признак нарушения зоны охраны (ЗО) - Δτk. В результате этого парируют формирование предварительных сообщений тревоги, вызванными превышением сигналами извещателей заданного порога ограничений при кратковременных мешающих воздействиях, вызванных, например, падением камней, веток деревьев, снежных комков.
Параллельная обработка, в том числе и производимая путем подбора наиболее подходящего (правдоподобного) информационного признака нарушения Δτk, является составной частью распределенной обработки цифровых сигналов и данных, предлагаемой в изобретении и реализуемой в различных информационных сечениях ТСО: на выходе извещателя; на выходе АЦП при преобразовании в двоичный код; на выходе систем сбора цифровых сигналов, формируемых одноименными и различными извещателями. При этом каждая из организованных распараллеленных операций обработки заканчивается сверткой полученного множества данных. Это необходимо, прежде всего, для того, чтобы сократить множество формируемых потоков и подпотоков информации на каждом из этапов распределенной ее обработки. При этом к числу наиболее простых и самых распространенных при реализации является операция мажоритарного голосования, выполняемая по полученной совокупности полученных при обработке результатов с добавлением информационных признаков и оценки степени доверия предварительному сообщению тревоги, формируемому на каждом из этапов распределенной обработки. При этом использование алгоритмов САП-4 приводит к дополнительным видам распараллеливания, когда обработка по одному и тому же алгоритму осуществляется в системе остаточных классов. Такую возможность обеспечивает нетрадиционное представление исходных цифровых сигналов и сообщений Xj их образами-остатками b1j, b2j и b3j, полученными от сравнения по модулям m1, m2 и m3. Примером этому может быть способ адаптивной нелинейной фильтрации измерений динамических объектов [6].
На фиг. 9 представлена иллюстрация, поясняющая сущность третьего этапа предлагаемых структурно-алгоритмических преобразований (САП-3), ориентированных на групповую обработку в блоках сбора цифровых импульсных сигналов однотипных извещателей, например, геофонов. Цель подобных алгоритмов САП-3, один из которых приведен на фиг. 9, заключается во взаимной компенсации помех, вызванных воздействиями на сейсмические извещатели тяжелогруженого транспорта, например, поезда, проходящего по железной дороге в 150 м от ЗО. Он оказывает одновременное воздействие на все геофоны, в результате чего амплитуды формируемых ими импульсных сигналов мало чем отличаются друг от друга. На фоне такого воздействия проход человеком ЗО становится незамеченным ТСО (фиг. 10(A)). В предлагаемом способе для компенсации подобных воздействий используют алгоритмы САП-3, суть которых заключается в том, что значения амплитуд сформированных импульсов подвергают суммированию и вычитанию с использованием различных комбинаций сочетаний суммирующих и вычитающих схем. Например, одна из схем: «+++---+++…-» (фиг. 9 и фиг. 10(Б)) предполагает суммирование значений амплитуд первых трех геофонов линейки, затем вычитание значений амплитуд следующих трех геофонов линейки, потом суммирование очередных значений амплитуд трех геофонов линейки и т.д. Если при этом число геофонов, амплитуды которых суммируются, будет равно числу геофонов, амплитуды которых вычитаются, то результирующий сигнал будет близок к нулю. На этом фоне проход человек через ЗО станет заметным, о чем свидетельствуют данные групповой обработки сигналов геофонов в системе их сбора (фиг. 10 (Б, В)).
На фиг. 10(B) представлены результаты групповой обработки сигналов однотипных извещателей, полученные при использовании второй схемы алгоритма, условно обозначенной как: «+--++--++…++-». При его использовании обеспечено более надежное подавление помехи, характеризующей естественный шум, и помехи, создаваемой проезжающим поездом, о чем свидетельствует сравнение графиков (фиг. 10 (Б, В)).
Таких новых схем «суммирования-вычитания» может быть много, следовательно, может быть много и ветвей параллельной обработки, которая будет организована на этапе использования САП-3. В результате этого по максимуму соотношений сигнал/шум и сигнал/(помеха + шум) и на основе реализовавшегося при этом энергетического признака нарушения рубежей объектов и границ, может быть выбран лучший из параллельных каналов обработки. Это пример реализации нового адаптивного подхода, который реализуют в условиях отсутствия системы мониторинга, позволяющего выбрать наиболее подходящий алгоритм обработки полученных сигналов.
На фиг. 11 представлены сигналы радиолучевых средств ТСО. На выходе первого типа подобных средств при проходе через ЗО появятся импульсные сигналы (фиг. 11(A)), на основе которых при превышении установленного порогового уровня (u) устройство принятия решения сформирует предварительное сообщение тревоги. При этом информационные признаки нарушения будут представлены амплитудой, длительностью и энергией импульсов, равной его площади, сформированной при превышении установленного порогового уровня (u).
При существующих способах применения радиолучевых средств ТСО при превышении установленного порогового уровня (u) выходное устройство сформирует сообщение тревоги, предоставляя право принятия решения человеку. В предлагаемом способе это будет только предварительное сообщение тревоги, которое может быть уточнено по результатам, которые были получены от извещателей других типов.
На фиг. 11 (Б) представлен исходный сигнал, формируемый ТСО, использующим для обнаружения нарушителя эффект «линии вытекающей волны (ЛВВ)». При этом факт нарушения ЗО отображается в виде маломощного синусоидального сигнала с изменяющейся частотой и амплитудой. Для повышения его сигнализационной надежности на первом этапе структурно-алгоритмических преобразований (САП-1) его представляют в виде квадратурных составляющих C(t) и R(t), имеющих вид унифицированных однополярных импульсных сигналов, с последующим формированием результирующего сигнала Z(t):

представляющего собой комплексную огибающую сигнала (фиг. 12). Далее его сравнивают с выбранным пороговым уровнем (u), превышение которого идентифицируют, как факт нарушения ЗО. На фиг. 13 представлены формируемые при этом информационные признаки нарушения: 1) амплитуда; 2) длительность; 3) скорость нарастания фронта и 4) энергия сигнала.
Преобразование (5) известно, как «преобразование Гильберта» ([14], Ипатов В.П. Широкополосные системы и кодовое разделение сигналов. Принципы и приложения - М.: «Техносфера», 2007, 488 с (с. 47)). При этом полученная в результате преобразования Гильберта комплексная огибающая сигнала отличается большим значением энергетического признака нарушения и большей сглаженностью импульсного сигнала по сравнению с квадратурными составляющими C(t) и R(t) (фиг. 13), что хорошо согласуется и с задачами, на решение которых ориентированы структурно-алгоритмические преобразования (САП-2 и САП-3).
Сущность изобретения также заключается в том, что при использовании САП-2 дополнительно повышают сигнализационную надежность извещателей, выходные сигналы которых приведены к унифицированной однополярной импульсной форме (фиг. 11(A), фиг, 12, фиг. 13).
Иллюстрации, приведенные на фиг. 14-19, посвящены пояснению основополагающих принципов повышения сигнализационной надежности ТСО типа «линии вытекающей волны (ЛВВ)» при использовании предлагаемого алгоритма САП-2, при этом особый интерес представляет иллюстрация предлагаемого способа компенсации помех, вызванных изменением электрической проводимости среды распространения радиоволн при дожде (фиг. 17). В этом случае на выходе ТСО формируется импульсный сигнал большой длительности, который может превысить установленный порог (u) срабатывания. На этом фоне проход человека также остается незамеченным (фиг. 18). Однако, если будет использован предлагаемый алгоритм структурно-алгоритмического преобразования второго уровня (САП-2), то, как следует из иллюстраций, приведенных на фиг. 19, на фоне внешнего воздействия в виде ливня, факт прохождения человеком ЗО становится хорошо различимым. Это является свидетельством того, насколько разработанные алгоритмы САП-i, i=1,2,3, оказывают полезными для повышения сигнализационной надежности существующих и разрабатываемых извещателей.
На фиг. 20-24 представлены результаты использования алгоритмов САП четвертого этапа (САП-4). Направление исследований, предполагающее использование различных проблемно-ориентированных алгоритмов САП-4, активно развивается в последнее время. Этому способствовала реализация в разрабатываемых бортовых радиотелеметрических системах (БРТС) изобретений [11-13]. В данном изобретении предлагается вариант их адаптации к системам телесигнализации, составляющим основу ТСО.
На фиг. 20(A) приведено графическое отображение сигнала, формируемого геофоном при отсутствии нарушителя. Из него следует, что на сигнал, формируемый геофоном, оказывает влияние естественный его шум.
На фиг. 20(Б) представлены результаты его кодирования восьмиразрядным двоичным кодом (N=2n=8), имеющим шкалу кодирования Шкод=(0-(2n-1))=(0-255). Из представленного графика следует: 1) адекватность цифрового сигнала <Xj>2 с учетом погрешности квантования δкв=100/256=0,39% относительно Ш исходному аналоговому сигналу Xj, 2) флюктуационная составляющая искажающего шума на уровне 3σ, где σ - его среднеквадратическое отклонение, составляет от 5 до 8% относительно Ш; 3) аномальные ошибки достигают значений 40% относительно Ш. Это означает, что уровень порогового сигнала (uпор) должен быть не менее 50%.
На фиг. 20(в) представлены результаты <Cj>2↔<b1j (mod 15), b3j (mod 17)>2 дополнительного экономного помехоустойчивого кодирования цифрового сигнала геофона <Xj>2 при использовании алгоритма (2). На нем видны разрешенные уровни для представления результатов дополнительного экономного помехоустойчивого кодирования цифрового сигнала геофона, разнесенные друг относительно друга на значение минимального кодового расстояния dmin. Наличие минимального кодового расстояния dmin.>1 свидетельствует о возможности обнаружения и исправления ошибок. При использовании алгоритма (2) количество обнаруживаемых и исправляемых ошибок достигает 4 при N=2n=8. Возможность обнаружения и исправления ошибок обеспечивают на основе согласованного функционирования двух режимов декодирования Cj универсального «жесткого», обеспечивающего возможность декодирования любых данных, независимо от их внутренних свойств, и «мягкого», обнаруживающего и исправляющего ошибки на основе инварианта в виде свойств «равноостаточности».
На фиг. 21 представлена внутренняя структура преобразованного с использованием САП-4: цифрового сигнала извещателя, где на фиг. 21(A) представлен исходный импульсный сигнал извещателя Xj, на фиг. 21(Б) значения первого образа-остатка <b1j (mod 15))>2, а на фиг. 21(B) значения второго образа-остатка <b3j (mod 17))>2. При этом сам дополнительно закодированный цифровой сигнал извещателя Сj представлен на фиг. 21(Г). При этом шкала его кодирования и обработки может быть различной, в том числе и равной исходной Шкод=2N. На иллюстрации (фиг. 21(Г)) она соответствует не 8, а 9-тиразрядному двоичному коду. При этом видны три временных момента, отличающихся от других тем, что значения Сj претерпевают разрывы (условные моменты времени 610с, 644с, 655с). Внутри графических фрагментов Cj, заключенных между разрывами, выполняется групповое свойство «равноостаточности» [8, 10]. Этот инвариант используют для контроля достоверности сигнала извещателя при последующей его обработке и передаче по каналам связи с помехами. Его суть в том, что при отсутствии искажений помехами или другими воздействиями любое из закодированных значений внутри выделенных графических фрагментов при его делении на значением минимального кодового расстояния dmin даст один и тот же остаток μj. Для обнаружения ошибок в реальных условиях, характеризующихся наличием различных искажений сформированного сигнала извещателя выбирают в сформированной статистической выборке, состоящей из остатков μj, наиболее часто встречающееся значение - моду гистограммы  , при этом все другие значения остатков (μj), не совпадающие со значением найденного инварианта
, при этом все другие значения остатков (μj), не совпадающие со значением найденного инварианта  , используют для обнаружения ошибок передачи сигналов или данных, которые исправляют путем подстановки вместо них значений
, используют для обнаружения ошибок передачи сигналов или данных, которые исправляют путем подстановки вместо них значений  .
.
Также для обеспечения самоконтроля правильности функционирования ТСО в условиях помех и искажений и контроля достоверности получаемых результатов используют второй дополнительный алгоритм, связанный с инвариантами, которые получают на основе абсолютных разностей первого и второго порядков, которые определяют по отношению к каждому из образов-остатков, полученным по одноименным модулям сравнения. Для формирования признаков второго инварианта используют абсолютные разности между значениями одноименных остатков b1j и b3j, представляющих собой внутреннюю структуру закодированных сигналов или данных <Cj>2↔<<b1j>2, <b3j>2>2 первого  и второго
и второго  порядков:
порядков:  и
и  , , соответственно, а также разности первого и второго порядков между восстановленными в результате декодирования значениями сигнала <Xj>2↔<<a1j>2, <a2j>2>2, где <a1j>2, <a2j>2 - его n-разрядные старшее и младшее полуслова, соответственно, и <a2j>2, представляет собой результат сравнения <b2j>2 по модулю сравнения m2=2n, и разности первого и второго порядков между остатками b2j, получаемыми в результате деления на модуль m2=2n, обеспечение равенств вычисленными всеми значениями первого и второго порядков используют для контроля достоверности полученных результатов в условиях помех и информационно-технических воздействий.
, , соответственно, а также разности первого и второго порядков между восстановленными в результате декодирования значениями сигнала <Xj>2↔<<a1j>2, <a2j>2>2, где <a1j>2, <a2j>2 - его n-разрядные старшее и младшее полуслова, соответственно, и <a2j>2, представляет собой результат сравнения <b2j>2 по модулю сравнения m2=2n, и разности первого и второго порядков между остатками b2j, получаемыми в результате деления на модуль m2=2n, обеспечение равенств вычисленными всеми значениями первого и второго порядков используют для контроля достоверности полученных результатов в условиях помех и информационно-технических воздействий.
На фиг. 22-24 представлены иллюстрации, демонстрирующие, как используют инварианты, формируемые на основе абсолютных разностей для контроля достоверности данных Cj, представленных образами-остатками, а также результатов параллельной обработки сигналов извещателей при использовании сформированной системы остаточных классов (СОК).
Их основу составляют абсолютные разности первого Δ1b1j и Δ1b3j, а также второго порядков Δ1b1j и Δ1b3j, которые получают, рассматривая внутреннюю структуру формирования сообщений Cj:
 и
и 
 и
и  .
.
Значения найденных абсолютных разностей сравнивают в элементе 26 сравнения. При их равенстве Δ1b1j=Δ1b3j и Δ2b1j=Δ2b3j (таблица на фиг. 24) принятые значения b1j и b1(j+1), а также b3j и b3(j+1) признают достоверными. Следовательно, достоверными считают и восстановленные значения цифрового сигнала или данных Xj и Xj+1 с совпадающими индексами j и j+1. При этом для абсолютных разностей между ними первого и второго порядков также должны быть справедливыми следующие равенства: 
Таким образом, использование структурно-алгоритмических преобразований САП-4 на основе дополнительного кодирования (Cj) приводит к следующим сущностным характеристикам предлагаемого изобретения:
- повышение сигнализационной надежности извещателей программно-математическими методами;
- дополнительное распараллеливание процессов распределенной обработки на каждом из ее этапов за счет нетрадиционного представления цифровых сигналов и данных в СОК;
- обеспечение защиты от помех, технической разведки и информационно-технических воздействий при передаче информации по радиоканалам.
О наличии нового положительного технического эффекта свидетельствует и классическая теория помехоустойчивого кодирования, которая утверждает, что без введения избыточности не представляется возможным обнаружить, а тем более исправить ошибки передачи ([15], Райнес Р.Л., Горяинов О.А. Телеуправление, М - Л., Энергия, 1965. - 536 с. (с. 108)).
Представление данных образами-остатками позволяет перейти от цифровых слов или сообщений Xj к меньшим по размерности независимым информационным элементам bij. При этом над образами-остатками bij можно производить различные операции, в том числе вычислительные [8, 10]. Их можно складывать, вычитать и умножать, т.е. производить все вычислительные операции, которые предусмотрены и для традиционно представленных значений Xj. Кроме того, их можно переставлять местами, что является свидетельством перехода от традиционной позиционной системы кодирования (счисления) к новой более экономичной смешанной системе, в которой позиционность представления сохраняется только при кодировании значений образов-остатков. Например, для случая представления образами-остатками слов-измерений с 2n=10 экономичность новой смешанной системы счисления может быть повышена в 1,5 раза. Это означает, что информационная нагрузка каждого из передаваемых символов увеличивается в 1,5 раза.
Новизна предлагаемого универсального алгоритма «жесткого» декодирования заключается в следующем.
1. В соответствии с классической теорией конечных полей превращение остатков в окончательный результат может быть произведено только на основе китайской теоремы об остатках [8, 10]. Для случая использования двух модулей сравнения m1=15 и m2=17 ее использование позволяет определить следующий алгоритм:

где m'1 и m'3 - мультипликативно обратные элементы:
(m1m'1≡1(mod m3)) и (m3m'3≡1(mod m1)).
Для восстановления в соответствии с классическим алгоритмом китайской теоремы об остатках необходимо найти мультипликативно обратные элементы m'1 и m'2 для модулей сравнения m1=15 и m3=17:17×8=136≡1(mod 15); 15×8=120≡1(mod 17). Следовательно, m'1=8 и m'3=8.
Для случая байтовых слов-измерений и выбранных оптимальных модулей сравнения m1=15 и m3=17 при значениях принятых образов-остатков b1=11 и b3=14 соответствующий алгоритм китайской теоремы об остатках имеет вид:

Однако классический алгоритм решения восстановления данных в исходном виде не соответствует потребностям практического применения по следующим причинам: 1) он сложен; 2) его мультипликативная структура построения приводит к усилению ошибок из-за того, что остатки, искаженные помехами, умножают на большие числа (применительно к рассмотренному случаю на числа 136 и 120 (формула (7*)).
Кроме того, основной недостаток китайской теоремы об остатках заключен в возможности их использования только при взаимно простых модулях сравнения (mi, mj)=1, в необходимости нормализации результата вычислений, заключающегося в нахождении его остатка по модулям mi,  или произведению модулей.
или произведению модулей.
Отмеченных недостатков лишена предлагаемая конструктивная теорема об остатках (КТО) [10], приводящая к следующему подходу в решении задачи восстановления данных, представленных образами-остатками:

где mi - модули сравнения, bi - образы-остатки,  - абсолютная разность между модулями сравнения.
- абсолютная разность между модулями сравнения.
Обозначения  читаются так: Δ не делится на n без остатка и km3+Δ, km3+Δ делятся на n без остатка.
читаются так: Δ не делится на n без остатка и km3+Δ, km3+Δ делятся на n без остатка.
Алгоритм является адаптивным, так как число его звеньев k, которые необходимо использовать для восстановления данных в традиционном виде, определяется значением  . Это означает, что, если n=1, то необходимо использовать только два первых звена формулы (8):
. Это означает, что, если n=1, то необходимо использовать только два первых звена формулы (8):

Если  , как это имеет место в случае выбора m1=15 и m2=17, то число звеньев k алгоритма равно 3 (8**):
, как это имеет место в случае выбора m1=15 и m2=17, то число звеньев k алгоритма равно 3 (8**):

Предположим, что в новом слове-измерении содержатся следующие два остатка b1=11 и b3=14, которые, как известно пользователю, получены от деления числа х на модули сравнения m1=15 и m3=17.
Для применения адаптивного алгоритма КТО необходимо определить следующие исходные данные:  и Δ=b1-b3=11-14=-3<0. Условие делимости дельта Δ на n не выполняется, поскольку -3 не делится на 2 без остатка, но (mi+Δ) на 2 делится. Следовательно, необходимо воспользоваться третьим звеном формулы (8**):
и Δ=b1-b3=11-14=-3<0. Условие делимости дельта Δ на n не выполняется, поскольку -3 не делится на 2 без остатка, но (mi+Δ) на 2 делится. Следовательно, необходимо воспользоваться третьим звеном формулы (8**):

В сравнении с классическим алгоритмом восстановления данных новое свойство алгоритма КТО заключено в возможности контроля достоверности восстановления слова-измерения: результат 116 повторен дважды.
Алгоритм «мягкого» декодирования предполагает выполнение следующих операций, последовательность которых представлена на фиг. 25 цифрами от 1 до 6, где
1 - нахождение абсолютных разностей между соседними закодированными значениями ТМП: 
2 - выделение графического фрагмента ТМП, заключенного между соседними значениями абсолютных разностей 
3 - определение значений равноостаточности  для закодированных данных внутри выделенного графического фрагмента для каждого временного отсчета j:
для закодированных данных внутри выделенного графического фрагмента для каждого временного отсчета j:

4 - построение гистограммы распределений значений нахождения ее моды:

где  - значение равноостаточности, которое воспринимают как верное;
- значение равноостаточности, которое воспринимают как верное;
5 - выполнение операций:
1) корректировка , предполагающая замену значений , отличающихся от наиболее часто совпадающих значений (моды), на  ;
;

в результате чего исправляют ошибки εj;
2) восстановление скорректированных значений

3) сравнение  со значением
со значением  полученным при выполнении операций «жесткого» декодирования на основе алгоритма КТО при использовании алгоритма сглаживания данных телеизмерений для подтверждения достоверности и принятие решения о выдаче значения ;
полученным при выполнении операций «жесткого» декодирования на основе алгоритма КТО при использовании алгоритма сглаживания данных телеизмерений для подтверждения достоверности и принятие решения о выдаче значения ;
6 - окончание массива закодированных значений данных C*j, j=1,…,s, попавших в выделенный графический фрагмент, и выдача результатов «мягкого» декодирования во второй блок «жесткого» декодирования.
Литература
1. Способ охраны периметра объекта (патент RU 2263968, МПИ7 G08B 13/02).
2. Способ охраны периметра объекта (патент 2473970 С1, МПИ7 G08B 13/02, опубликованный 27.01.2013 г., бюл. №3).
3. Способ охраны периметра объекта (патент RU 2379759, МПК G08B 13/26).
4. Телемеханическая система «ЛИЛАНА-ВИЯ» и сигнализационное заграждение с извещателем В.И. Яцкова (патент RU 2379759, МПК G08B 13/26 и [4], патент RU 2491646, МПК G08C 15/08, G08B 13/26).
5. Современная телеметрия в теории и на практике / Учебный курс, СПб.: Наука и Техника, 2007. - 672 с.
6. Способ передачи телеметрической информации, адаптированный к различным ситуациям, проявляющимся при проведении испытаний ракетно-космической техники, и система для его осуществления (патент RU №2571584 С1, опубл. 10.10.2015, бюл. №35).
7. Способ передачи ТМИ, адаптированный к неравномерности потока данных телеизмерений, и система для его осуществления (Патент RU №2480838 С1, опубл. 25.04.2013, бюл. №21 - 16 с.).
8. Виноградов И.М. «Основы теории чисел», М.: Наука, 1972 г.
9. Зюко А.Г. Помехоустойчивость и эффективность систем связи. - М.: Связь, 1972. - 360 с.).
10. Кукушкин С.С. Теория конечных полей и информатика. Т. 1. Методы и алгоритмы, классические и нетрадиционные, основанные на использовании конструктивной теоремы об остатках, М: Минобороны России, 2003. - 284 с.
11. Способ передачи информации (патент RU №2609747, приоритет от 13.08.2017 г.).
12. Способ передачи информации и система для его осуществления (патент RU №2586833, приоритет 15.08.2015 г.).
13. Способ передачи информации и система для его осуществления (патент RU №2586605, приоритет от 22.03.2013 г.).
14. Ипатов В.П. Широкополосные системы и кодовое разделение сигналов. Принципы и приложения - М.: «Техносфера», 2007, 488 с. (с. 47).
15. Райнес Р.Л., Горяинов О.А. Телеуправление, М - Л., Энергия, 1965. - 536 с. (с. 108)).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРВИЧНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ АДАПТИВНОЙ НЕЛИНЕЙНОЙ ФИЛЬТРАЦИИ ДАННЫХ ИЗМЕРЕНИЙ | 2017 |
|
RU2672392C1 |
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ РУБЕЖЕЙ ОБЪЕКТОВ И ГРАНИЦ | 2018 |
|
RU2705770C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 2020 |
|
RU2757306C1 |
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ ОБЪЕКТОВ И ГРАНИЦ | 2021 |
|
RU2768227C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 2020 |
|
RU2739335C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2609747C1 |
| СПОСОБ ЭКОНОМНОГО ПРЕДСТАВЛЕНИЯ И ПЕРЕДАЧИ БИПОЛЯРНЫХ ДАННЫХ И СИГНАЛОВ | 2017 |
|
RU2649291C1 |
| СПОСОБ ПЕРВИЧНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ОБНАРУЖЕНИЕМ И ИСПРАВЛЕНИЕМ ОШИБОК ПЕРЕДАЧИ | 2017 |
|
RU2658795C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2022 |
|
RU2801462C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2586833C1 |




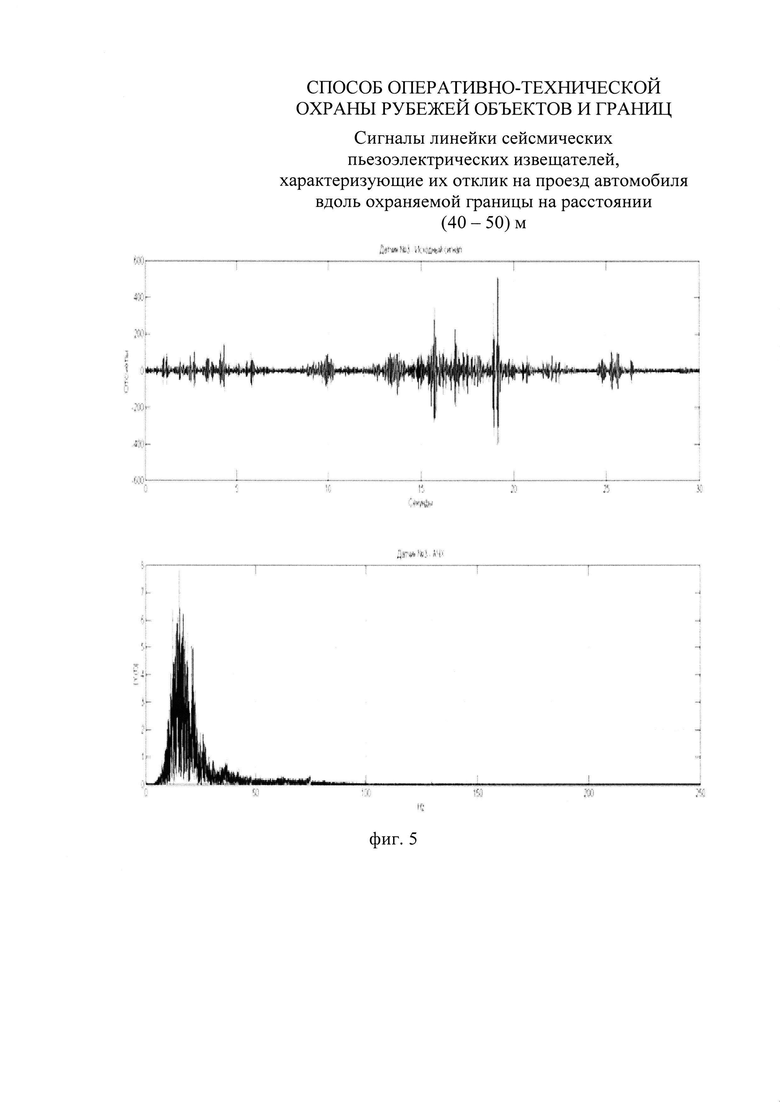


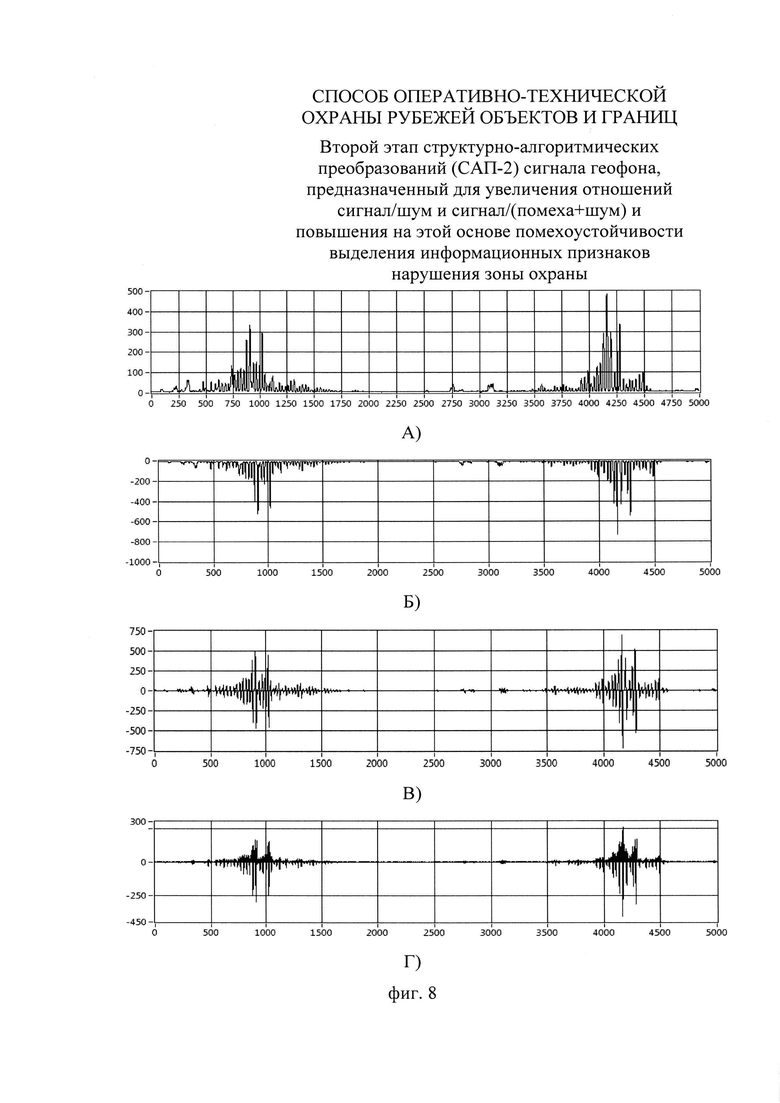
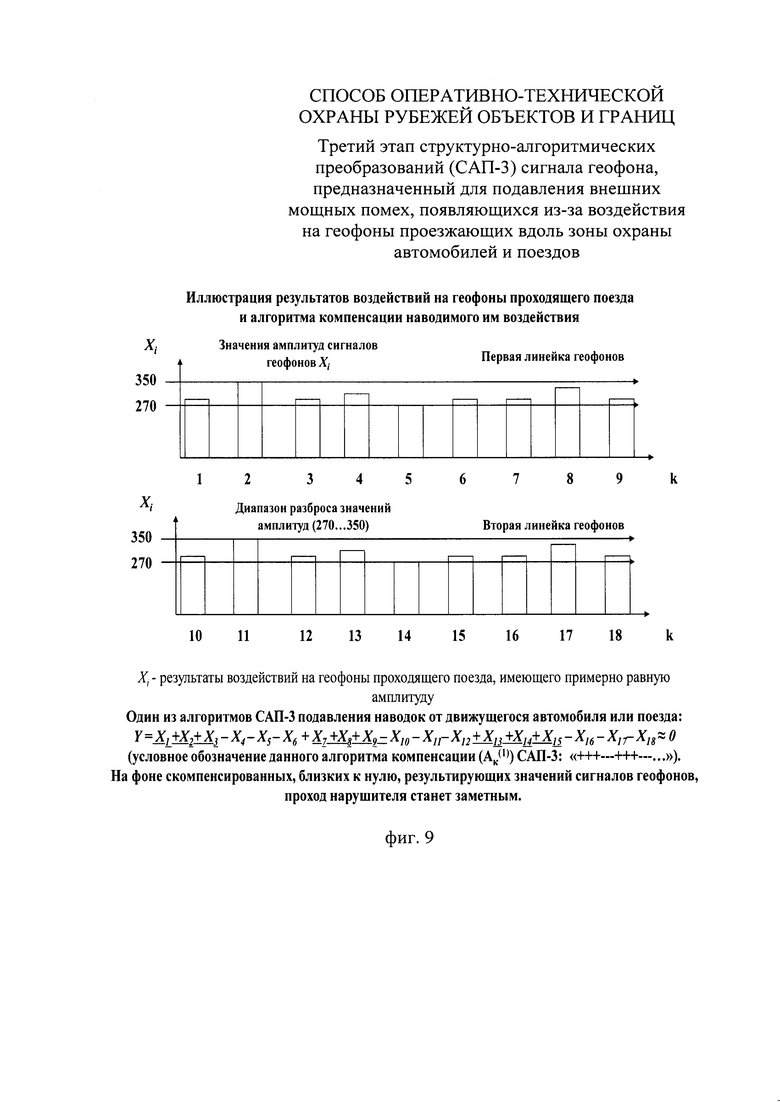



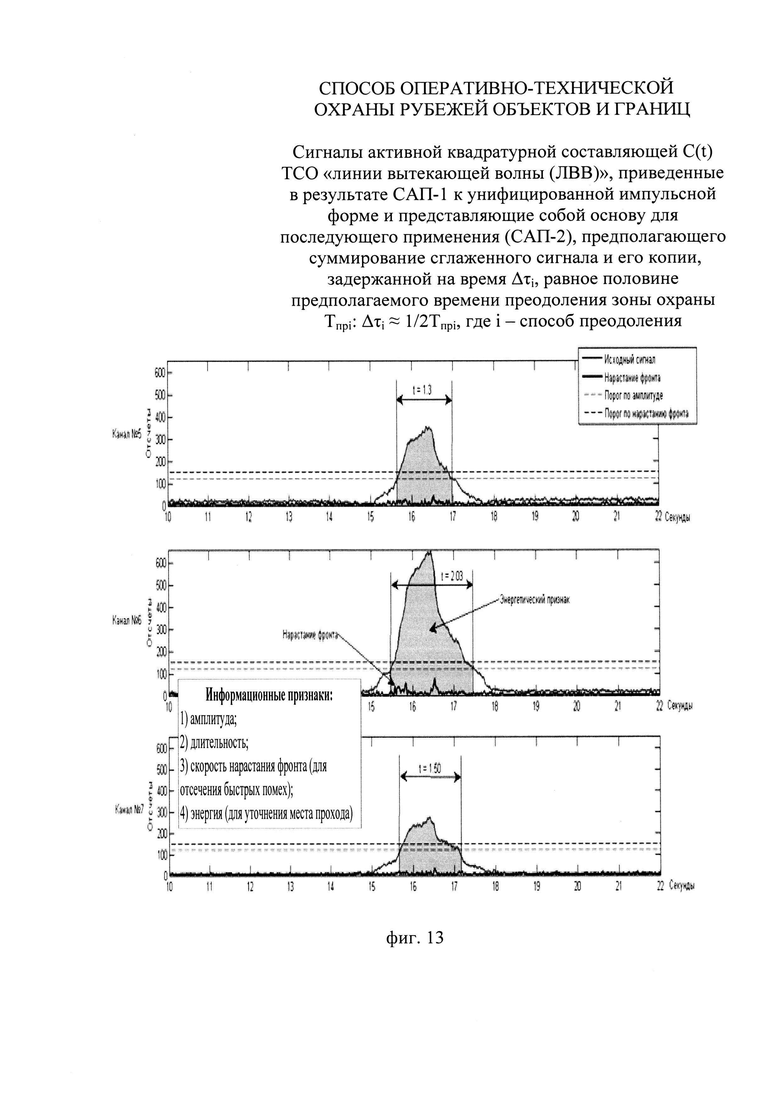

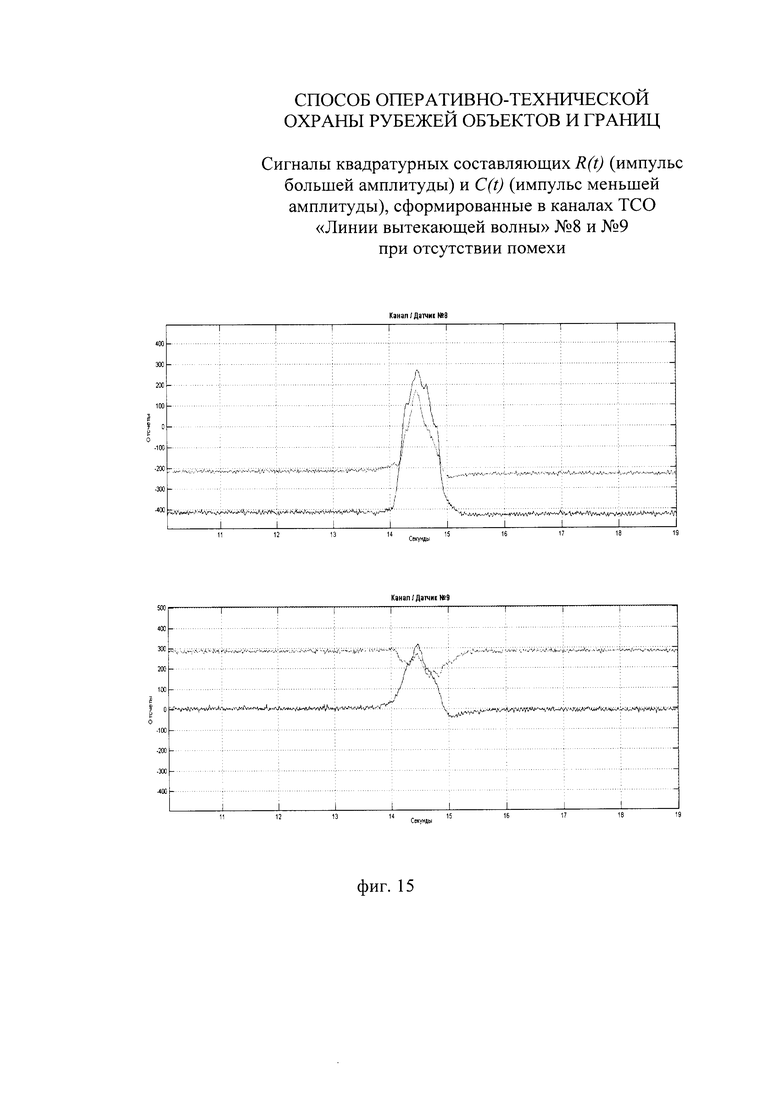



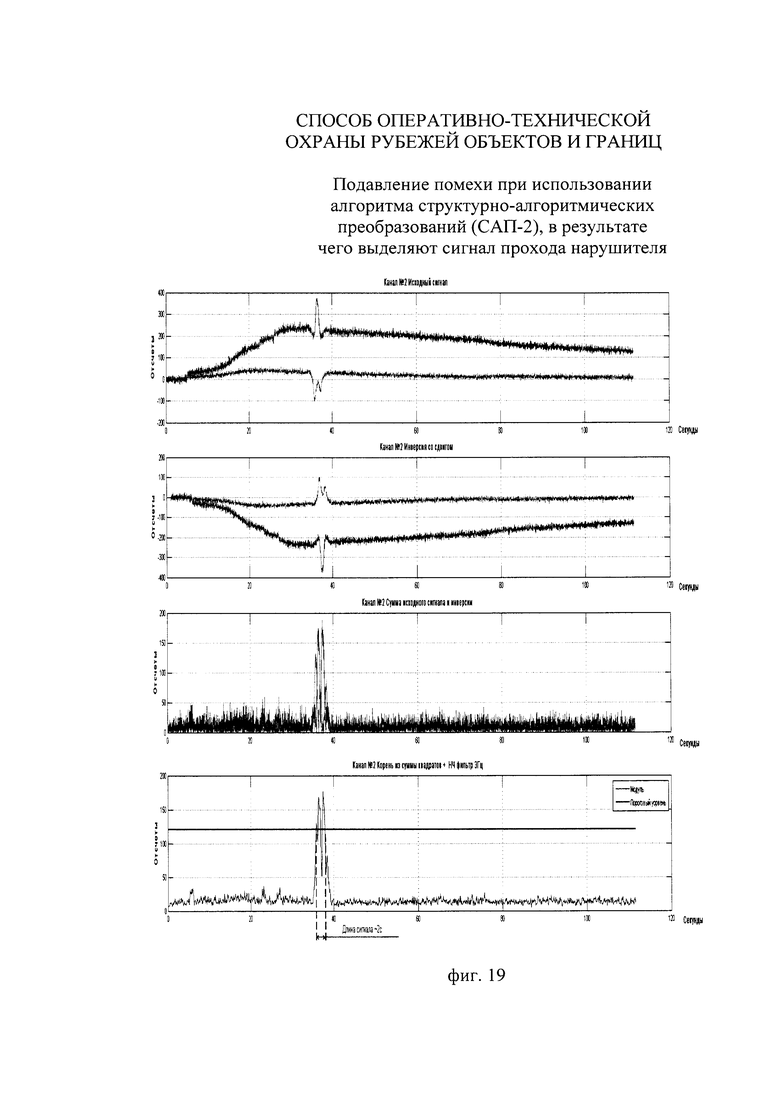
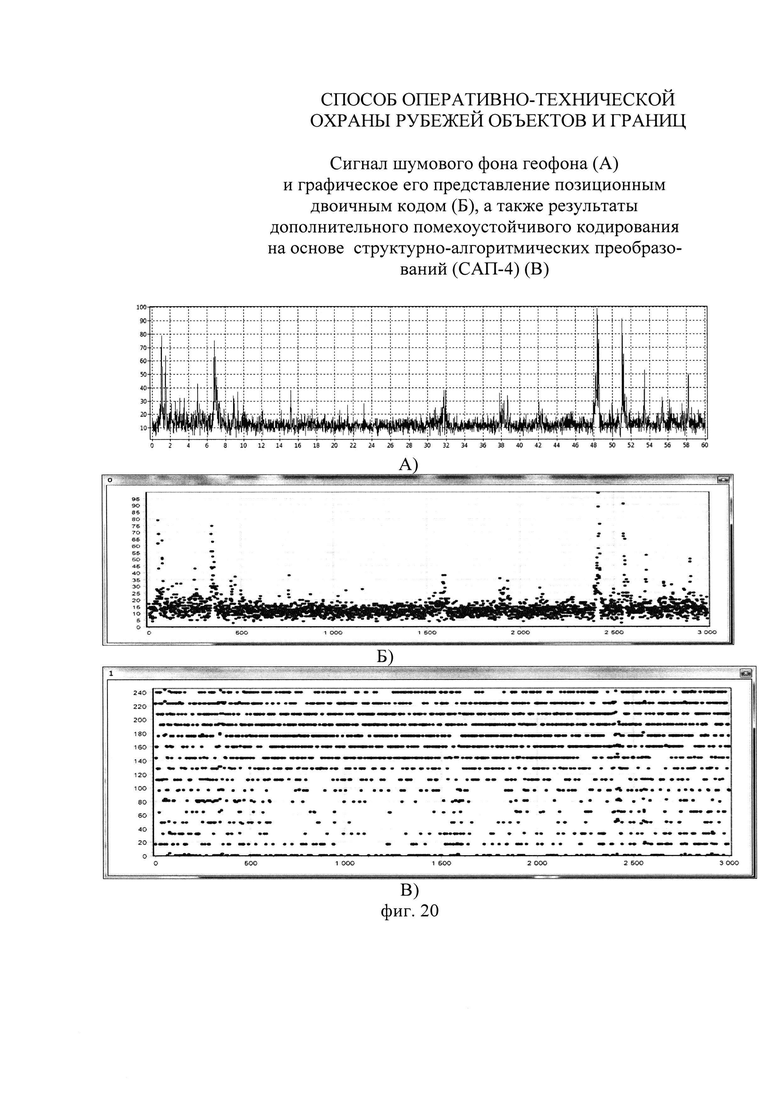

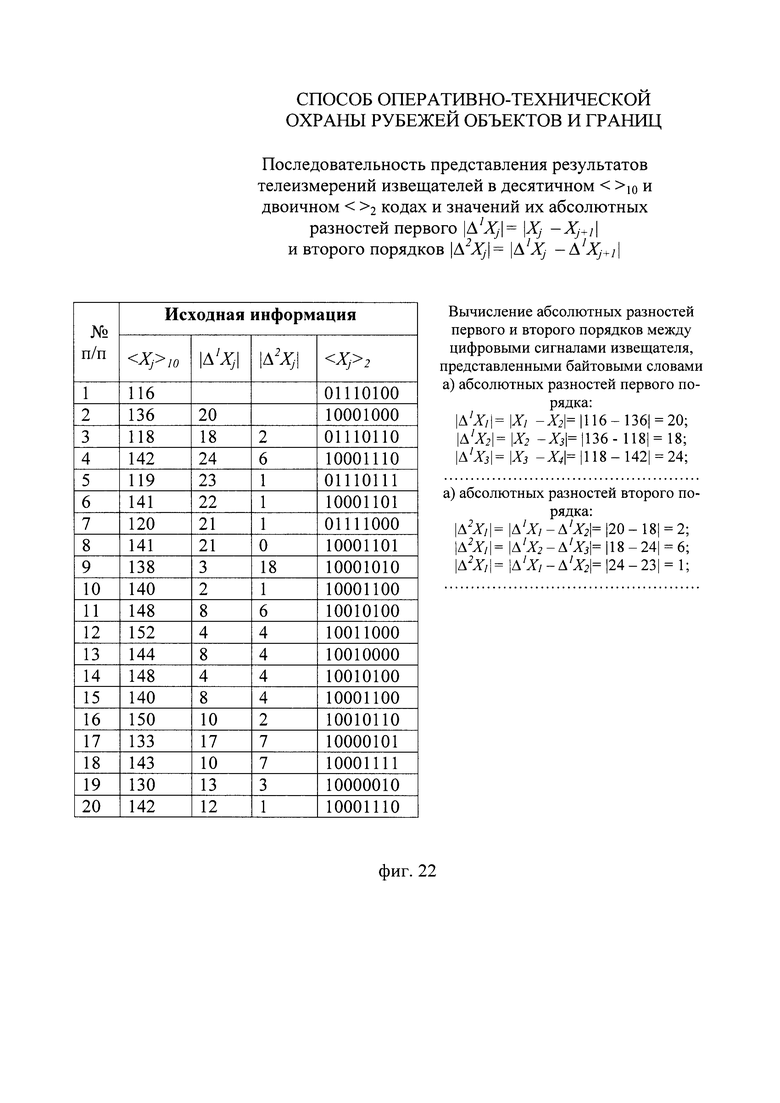



Изобретение относится к области телемеханики и технических средств охраны (ТСО). Технический результат от использования изобретения заключается в уменьшении вероятности ложных срабатываний, приводящих к формированию сигналов ложной тревоги. Достижение технического результата обеспечивается распределенной обработкой сигналов извещателей, осуществляемой на различных (i) этапах их получения и обработки, осуществляемой как последовательно, так и параллельно с использованием различных алгоритмов обнаружения нарушителя, при этом формируют обобщенный результат с оценками его достоверности, используют последовательность проблемно-ориентированных структурно-алгоритмических преобразований (САП-i), осуществляемых по отношению к сигналам и формируемым данным, как на выходе извещателей, в том числе и использующих различные физические принципы обнаружения факта нарушений, так и других информационных сечениях подготовки принятия решения. Получаемые в процессе обработки и преобразования результаты одновременно используют по дополнительному назначению - для самоконтроля технического состояния и контроля достоверности сигналов, формируемых извещателями, а также для повышения их защищенности от помех, информационно-технических воздействий и несанкционированного доступа. 9 з.п. ф-лы, 25 ил.
1. Способ оперативно-технической охраны рубежей объектов и границ, заключающийся в том, что в зоне охраны, являющейся одновременно и передающей стороной при обнаружении техническими средствами охраны нарушителей, размещают в определенном порядке извещатели, использующие в том числе и различные физические принципы обнаружения нарушителей, обеспечивают сбор сигналов, формируемых извещателями, а на приемной стороне осуществляют обработку собранных сигналов и полученных данных и на основе последующего их анализа формируют сообщение тревоги, отличающийся тем, что сигналы извещателей, использующие различные физические принципы обнаружения нарушителей и имеющие различную форму аналогового представления, в том числе и биполярную, подвергают не сосредоточенной, осуществляемой при принятии решения о выдаче сообщения тревоги, а распределенной предварительной обработке и фильтрации с элементами адаптации к различным условиям их применения и реализуемого при этом искусственного интеллекта, способствующего последовательному увеличению информационных признаков нарушений в исходных сигналах, формируемых извещателями, после каждого i-того этапа распределенной обработки (i=1, 2, 3, 4), в том числе и без усовершенствования существующих технических средств охраны и увеличения их количества, при этом в результате каждого этапа распределенной обработки сигналов извещателей формируют предварительные сообщения тревоги, информационную значимость которых повышают при каждом очередном этапе распределенной обработки по мере увеличения числа информационных признаков в исходных сигналах извещателей, для чего на различных (i) этапах получения сигналов извещателей и их распределенной обработки, осуществляемой как последовательно, так и параллельно, по полученным данным параллельной распределенной обработки, осуществляемой на различных (i) этапах получения данных обработки с использованием различных алгоритмов обнаружения нарушителя, сигналы извещателей, полученные на последнем этапе распределенной их обработки, обладающие увеличенным числом информационных признаков нарушения зоны охраны, используют в качестве обобщенного результата, по которому принимают решение о выдаче сигнала тревоги с оценками его достоверности, для организации предварительной обработки, осуществляемой по отношению к сигналам и данным, формируемым на выходе извещателей, в том числе и использующих различные физические принципы обнаружения факта нарушений, так и в других информационных сечениях подготовки принятия решения, включающих в себя как существующие, так и разрабатываемые системы сбора и формирования сообщений тревоги, которые классифицируют как предварительные сообщения, требующие дополнительного подтверждения их достоверности на заключительном этапе анализа в центре обработки информации для обеспечения выполнения заданных требований, относящихся: 1) к показателям помехоустойчивости и сигнализационной надежности извещателей, систем сбора и обработки информации; 2) к показателям достоверности формируемых ими сигналов, 3) к вероятности обнаружения нарушителя и 4) к достижению заданных временных интервалов между сигналами ложной тревоги, при этом выполнение заданных требований обеспечивают, в основном, на основе программно-математических способов, не требующих реконструкции аппаратной части существующих технических средств охраны, на основе использования программно-реализуемых структурно-алгоритмических преобразований (САП-i), i=1, 2, 3, 4, …, получаемые при этом результаты одновременно используют по дополнительному назначению - для самоконтроля технического состояния и контроля достоверности сигналов, формируемых извещателями, а также для повышения их защищенности от помех, информационно-технических воздействий и несанкционированного доступа, для чего формируют не только внешние (Sвнеш), традиционно используемые, но и внутренние (Sвнутр) структуры или сигнатуры представления сигналов извещателей и формируемых данных, информационные признаки разделения и выделения которых известны только получателю и отсутствуют в передаваемой информации.
2. Способ по п. 1, отличающийся тем, что проблемно-ориентированные структурно-алгоритмические преобразования первого этапа (САП-1), входящие в состав (САП-i), i=1, 2, 3, 4 …, имеют следующее основное целевое предназначение: уменьшение интенсивности помехового фона путем исключения из него низкочастотной и высокочастотной составляющих, которые по природе их физического происхождения не могут быть в составе информационного сигнала извещателей и представления формируемых сигналов в унифицированной однополярной импульсной форме, для чего используют фильтры низкочастотной и высокочастотной составляющих, преобразование полученного сигнала с формированием квадратурных его форм в виде квадратурных составляющих исходного сигнала извещателя, преобразование Гильберта и/или выпрямление биполярных сигналов с представлением полученных результатов в виде однополярного импульсного сигнала, при этом результаты приведения различных форм сигналов извещателей, в том числе и применяющих различные физические принципы их формирования, к унифицированной импульсной форме их представления используют для обеспечения возможности наиболее простой и унифицированной реализации технических средств охраны, систем сбора и обработки сформированных сигналов, включая и используемые в настоящее время технологии сравнения сформированных импульсных сигналов с устанавливаемыми и регулируемыми при изменении условий эксплуатации уровнями ограничений, превышение которых служит предварительным признаком нарушения рубежей охраны важных объектов и границ, при этом полученные сигналы используют для предварительной идентификации способа преодоления зоны охраны: дискретный импульсный сигнал с продолжительными перерывами, как характеристику толчкового способа пересечения шагом и бегом, а с импульсным сигналом с малыми по времени паузами между ними отождествляют способ нарушения с использованием колесных транспортных средств, минимизирующих толчковые воздействия на почву зон охраны.
3. Способ по п. 1, отличающийся тем, что на втором этапе использования распределенных САП (САП-2), входящих в состав (САП-i), i=1, 2, 3, 4 …, последовательность импульсных сигналов, сформированную каждым из однотипных извещателей, инвертируют и сдвигают относительно исходной на время Δτk, равное половине предполагаемого времени Тпрk, которое потребуется для пересечения нарушителем охраняемого участка территории или зоны охраны, на которой установлены извещатели технических средств охраны (Δτk≈1/2Тпрk), которую затем суммируют с исходной последовательностью импульсных сигналов, результаты суммирования дифференцируют для дополнительного подавления шумового и помехового фона, в результате чего повышают соотношение сигнал/шум и сигнал/(шум + помеха), а задержкой Δτk, которая может изменяться при повторе приведенных операций обработки, включая возможность параллельной обработки с различными значениями Δτk, соответствующими определенным признакам нарушений, которые были получены на предварительном этапе обучения адаптивных и интеллектуальных технических средств охраны, на основе чего вводят дополнительный информационный признак - Δτk, позволяющий отличить факт пересечения охраняемого участка территории, на которой установлены извещатели технических средств охраны, от других помех, вызванных при использовании сейсмических пьезоэлектрических извещателей и геофонов падением веток, камней, снежных комков, проездом транспортных средств вблизи от охраняемой территории и важных объектов, влиянием дождей и ливней на радиолучевые технические средства охраны, сформированный при этом дополнительный информационный признак Δτk и время Ти превышения импульсным сигналом установленного для него одного или нескольких пороговых уровней, в том числе и выставленных одновременно для идентификации различных событийных явлений, используют для классификации предполагаемого нарушения - одиночного, группового, определения предполагаемого способа преодоления охранной зоны - на транспорте, бегом, шагом, ползком, перекатом.
4. Способ по п. 1, отличающийся тем, что на третьем этапе использования распределенных САП (САП-3), входящих в состав (САП-i), i=1, 2, 3, 4 …, осуществляют групповую обработку имеющегося множества извещателей одного типа, составляющих линейку или линейки извещателей, для дополнительного уменьшения уровня помех и систематических погрешностей телеизмерений, в том числе и вызванных такими воздействиями, которые приводят к превышению установленных пороговых уровней у всех или у подавляющего большинства извещателей одного типа, что имеет место в результате воздействий, оказываемых мощными силовыми электрическими установками, находящимися вблизи от зоны охраны, проездом железнодорожного и автомобильного транспорта, в результате чего обеспечивают наблюдение нарушений зоны охраны на фоне маскирующих помех или специально сформированных информационно-технических воздействий; по полученным данным принимают решение о выдаче сообщения предварительной тревоги на основе учета индивидуальной и групповой обработки данных извещателей одного типа, сформированные по каждому типу извещателей сообщения предварительной тревоги передают по каналам связи в систему сбора данных различных типов извещателей, на основе которых формируют сообщение тревоги более высокого уровня значимости, которое передают совместно с данными самоконтроля работоспособности извещателей и данными, предназначенными для подтверждения достоверности полученной информации, а также для обеспечения дополнительной идентификации и верификации событий в центре принятия решений.
5. Способ по п. 1, отличающийся тем, что сформированные импульсные сигналы, имеющие аналоговую форму представления, в том числе и после выполненных структурно-алгоритмических преобразований первого этапа (САП-1), преобразуют в унифицированный цифровой N-разрядный код (N=2n), для чего выбирают частоту формирования его значений в соответствии с теоремой В.А. Котельникова, исходя из требуемой точности восстановления исходного аналогового сигнала извещателей, применяют очередные структурно-алгоритмические преобразования четвертого этапа (САП-4), входящие в состав (САП-i), i=1, 2, 3, 4, и предназначенные для самоконтроля функционирования извещателей и оценивания достоверности формируемых ими сигналов по определяемым сигнатурным признакам, повышения защищенности сформированных цифровых сигналов и данных от помех, информационно-технических воздействий и несанкционированного доступа, для чего используют нетрадиционное представление значений цифрового сигнала <Xj>2 в виде дополнительного кодирования его значений экономным безызбыточным или малоизбыточным помехоустойчивым кодом <Cj>2↔<<b1j>2, <b3j>2>2, где <>2 - символ представления сигналов и данных двоичным кодом, <b1j>2 и <b3j>2 - образы-остатки, полученные от деления исходных значений данных, слов-измерений или сообщений Xj на модули сравнения m1=2n-1 и m3=2n+1 соответственно, в результате чего формируют внутреннюю структуру данных (Sвнутр), которой заменяют традиционно используемую внешнюю структуру данных (Sвнеш), для доступа к которой и для обеспечения контроля достоверности принятых данных технических средств охраны разделяют полученные в результате дополнительного экономного помехоустойчивого кодирования и принятые после их передачи по каналам связи N-разрядные двоичные данные, слова-измерения или сообщения <Cj>2 (N=2n) на n-разрядные составные части меньшей разрядности, представляющие собой их образы-остатки <b1j>2 и <b3j>2, образующие внутреннюю структуру сформированных цифровых сигналов и данных (Sвнутр).
6. Способ по п. 1, отличающийся тем, что при следующей по порядку унификации представления цифровых сигналов для обеспечения возможности использования всего динамического диапазона представления значений сформированных импульсов Шкод=(0-(2N-1)), определяемого выделенной разрядной сеткой (N) кодирования, и исключения влияния эффекта «зашкаливания» значений сигналов извещателей, преобразованных в цифровую форму, на результаты оценивания энергетического признака нарушений, преобразуют последовательность данных измерений извещателей <Xj>2, где j=1, 2, 3, … - счетное множество дискретных отсчетов импульсного сигнала, представленного в цифровой форме, а <>2 - символ представления данных двоичным кодом, в экономный безызбыточный или малоизбыточный помехоустойчивый код системы остаточных классов: <Cj>2↔<<b1j>2, <b3j>2>2, где <b1j>2 и <b3j>2 - образы-остатки, полученные от деления исходных значений данных, слов-измерений или сообщений Xj на модули сравнения m1=2n-1 и m3=2n+1 соответственно, устанавливают пороговые уровни срабатывания для выбранной модели обнаружения нарушителя и используемого типа цифрового исходного <Xj>2 и/или преобразованного кода <Cj>2, превышение которых рассматривают в качестве первичных сигнальных признаков нарушения зоны охраны, на основе сравнений значений цифровых импульсных сигналов с установленными пороговыми уровнями определяют информационные признаки нарушения рубежей охраны важных объектов и границ, к числу которых, прежде всего, относят: 1) время превышения сформированным импульсным сигналом установленного порогового уровня; 2) крутизну его фронтов; 3) интегральный энергетический показатель в виде площади импульса, выходящего за пределы порога ограничения; на втором и третьем этапах распределенных САП используют следующие проблемно-ориентированные структурно-алгоритмические преобразования второго (САП-2) и третьего этапов (САП-3) импульсного сигнала, сформированного каждым из извещателей, обеспечивающие возможность дополнительного самоконтроля их технического состояния, оценки достоверности формируемых сообщений тревоги и предназначенные для достижения следующих сущностных характеристик: дополнительного повышения соотношения сигнал/шум и сигнал/(помеха + шум), устойчивости к помехам различного происхождения, в том числе и создаваемым в условиях радиоэлектронного противоборства, к изменяющимся условиям эксплуатации, информационно-техническим и климатическим воздействиям.
7. Способ по п. 1, отличающийся тем, что для самоконтроля технического состояния и контроля достоверности сигналов, формируемых извещателями, а также для повышения их защищенности от помех, информационно-технических воздействий и несанкционированного доступа используют структурно-алгоритмические преобразования четвертого этапа (САП-4), связанные с нетрадиционным представлением значений цифрового сигнала <Xj>2 в виде дополнительного кодирования его значений экономным безызбыточным или малоизбыточным помехоустойчивым кодом <Cj>2↔<<b1j>2, <b3j>2>2, где <b1j>2 и <b3j>2 - образы-остатки, полученные от деления исходных значений данных, слов-измерений или сообщений Xj на модули сравнения m1=2n-1 и m3=2n+1 соответственно, для чего используют два типа декодирования экономного безызбыточного или малоизбыточного помехоустойчивого кода <Cj>2, называемых «жесткое» и «мягкое», осуществляют их восстановление с использованием универсального алгоритма «жесткого» декодирования, обеспечивающего восстановление в исходном виде  с привнесенными каналом связи ошибками
с привнесенными каналом связи ошибками  , где <Xj>2 - истинные значения переданной последовательности данных (j=1,2,3,… - счетное множество, определяющее условную нумерацию данных, слов-измерений или сообщений, содержащихся в цифровом групповом сигнале или пакете данных независимо от свойств наличия или отсутствия их корреляционной взаимосвязи и на основе работающего под его управлением алгоритма «мягкого» декодирования, обнаруживающего и исправляющего ошибки передачи информации при наличии свойств корреляционной взаимосвязи передаваемых данных, слов-измерений или сообщений.
, где <Xj>2 - истинные значения переданной последовательности данных (j=1,2,3,… - счетное множество, определяющее условную нумерацию данных, слов-измерений или сообщений, содержащихся в цифровом групповом сигнале или пакете данных независимо от свойств наличия или отсутствия их корреляционной взаимосвязи и на основе работающего под его управлением алгоритма «мягкого» декодирования, обнаруживающего и исправляющего ошибки передачи информации при наличии свойств корреляционной взаимосвязи передаваемых данных, слов-измерений или сообщений.
8. Способ по п. 1, отличающийся тем, что для реализации универсального алгоритма «жесткого» декодирования экономного безызбыточного или малоизбыточного помехоустойчивого кода <Cj>2↔<<b1j>2, <b3j>2>2, где <b1j>2 и <b3j>2 - образы-остатки, полученные от деления исходных значений данных, слов-измерений или сообщений Xj на модули сравнения m1=2n-1 и m3=2n+1, определяют разности между значениями образов-остатков Δj=b1j-b3j по модулям сравнения m1 и m3, полученные разности Δj делят на 2; если при разностях, равных нулю и больше нуля (Δj≥0), деление выполняется без остатка, то уменьшенные в 2 раза значения разностей (Δj) умножают на один из модулей сравнения (mi) i=1,3, а к полученному результату добавляют соответствующий этому модулю образ-остаток (mi) i=1,3; при разностях, меньших нуля (Δj<0), и выполнении условия деления Δj на 2 без остатка полученные и уменьшенные в 2 раза значения отрицательных разностей Δj суммируют со значением одного из модулей сравнения m1 или m3, а найденные в результате суммирования данные умножают на другой модуль сравнения m3 или m1, при этом его же образ-остаток b1j или b3j, соответственно, добавляют к полученному результату вычислений; при невыполнении условия делимости без остатка разностей Δj между значениями образов-остатков на 2 их складывают с одним из чисел-модулей, полученные при этом значения делят на 2, после чего результат деления умножают на число другого модуля сравнения и к найденным данным добавляют его же образ-остаток, контроль достоверности восстановления обеспечивают при равенстве данных, полученных при замене индексов модулей сравнения и их остатков.
9. Способ по п. 1, отличающийся тем, что при выполнении операций «мягкого» декодирования, предназначенного для обнаружения и исправления ошибок передачи цифровых сигналов и данных, находят разрывы, определяющие границы графических фрагментов передаваемых сигналов и данных <Cj>2↔<<b1j>2, <b3j>2>2, где <b1j>2 и <b3j>2 - образы-остатки, полученные от деления исходных значений данных, слов-измерений или сообщений Xj на модули сравнения m1=2n-1 и m3=2n+1, преобразованных на передающей стороне с использованием алгоритмов структурно-алгоритмического преобразования четвертого этапа (САП-4) сигналов и данных, представленных при использовании традиционного позиционного двоичного кода <Xj>2, затем, используя признаки идентификации разрывов <Cj>2 в виде разностей первого порядка между последующими <Cj+1>2 и предшествующими <Cj>2 значениями сигналов и данных, закодированных в результате использования САП-4, определяют те их абсолютные значения, которые попадают в интервал (0,6-1)Шкод, где Шкод - диапазон или шкала представления цифровых сигналов извещателя, равные 2N, где N=2n - число разрядов двоичного кода, используемого для представления слов-измерений и сообщений, принятые с ошибками данные и сигналы <Cj>2, преобразованные на передающей стороне с использованием алгоритма дополнительного экономного помехоустойчивого кодирования, подвергают делению на значение минимального кодового расстояния dmin=2n+1, в результате чего находят целочисленные остатки от деления μj, строят гистограмму распределения их значений ƒгист(μj) и в качестве инварианта, проявляющегося в виде группового значения равноостаточности (μj=Const) внутри выделенных временных участков, заключенных между соседними разрывами  и
и  , выбирают в сформированной статистической выборке, состоящей из остатков μj, наиболее часто встречающееся значение - моду гистограммы
, выбирают в сформированной статистической выборке, состоящей из остатков μj, наиболее часто встречающееся значение - моду гистограммы  , при этом все другие значения остатков (μj), не совпадающие со значением найденного инварианта
, при этом все другие значения остатков (μj), не совпадающие со значением найденного инварианта  , используют для обнаружения ошибок передачи сигналов или данных, которые исправляют путем подстановки вместо них значений
, используют для обнаружения ошибок передачи сигналов или данных, которые исправляют путем подстановки вместо них значений  .
.
10. Способ по п. 1, отличающийся тем, что для дополнительного контроля достоверности полученных сигналов и данных используют абсолютные разности между значениями одноименных остатков b1j и b3j, представляющих собой внутреннюю структуру закодированных сигналов или данных <Cj>2↔<<b1j>2, <b3j>2>2 первого  и второго
и второго  порядков:
порядков:  и
и  ,
,  соответственно, а также разности первого
соответственно, а также разности первого  и второго порядков между восстановленными в результате декодирования значениями сигнала <Xj>2↔<<a1j>2, <a2j>2>2, где <a1j>2, <a2j>2 - его n-разрядные старшее и младшее полуслова соответственно, и <a2j>2, представляет собой результат сравнения <b2j>2 по модулю сравнения m2=2n, и разности первого и второго порядков между остатками b2j, получаемыми в результате деления на модуль m2=2n, обеспечение равенств вычисленными всеми значениями первого и второго порядков используют для контроля достоверности полученных результатов в условиях помех и информационно-технических воздействий.
и второго порядков между восстановленными в результате декодирования значениями сигнала <Xj>2↔<<a1j>2, <a2j>2>2, где <a1j>2, <a2j>2 - его n-разрядные старшее и младшее полуслова соответственно, и <a2j>2, представляет собой результат сравнения <b2j>2 по модулю сравнения m2=2n, и разности первого и второго порядков между остатками b2j, получаемыми в результате деления на модуль m2=2n, обеспечение равенств вычисленными всеми значениями первого и второго порядков используют для контроля достоверности полученных результатов в условиях помех и информационно-технических воздействий.
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ, АДАПТИРОВАННЫЙ К РАЗЛИЧНЫМ СИТУАЦИЯМ, ПОЯВЛЯЮЩИМСЯ ПРИ ПРОВЕДЕНИИ ИСПЫТАНИЙ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571584C2 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ, АДАПТИРОВАННЫЙ К НЕРАВНОМЕРНОСТИ ПОТОКА ДАННЫХ ТЕЛЕИЗМЕРЕНИЙ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2480838C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2586833C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2586605C2 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА ПЕРЕДАЧИ ОБСЛУЖИВАНИЯ МЕЖДУ ЯЧЕЙКАМИ В ТЕЛЕКОММУНИКАЦИОННОЙ СИСТЕМЕ С ПОДДЕРЖКОЙ АГРЕГИРОВАНИЯ НЕСУЩИХ | 2014 |
|
RU2608747C1 |
| СПОСОБ ДИСКРЕТНОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2010 |
|
RU2444066C1 |
| СПОСОБ ДИСКРЕТНОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2010 |
|
RU2434301C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475861C1 |
| СПОСОБ АДАПТИВНОЙ АДРЕСНОЙ СИГНАЛИЗАЦИИ | 2003 |
|
RU2269819C2 |
| СИСТЕМА МОНИТОРИНГА | 2010 |
|
RU2460144C2 |
| МОБИЛЬНЫЙ КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ОХРАНЫ | 2010 |
|
RU2427039C1 |
| СПОСОБ ПРОЕКТИРОВАНИЯ СИСТЕМЫ КОМПЛЕКСНОЙ БЕЗОПАСНОСТИ ОБЪЕКТА | 2002 |
|
RU2219576C2 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ В КОНТРОЛИРУЕМОЙ ЗОНЕ | 2010 |
|
RU2455692C1 |
| US 7348894 B2, 25.03.2008 | |||
| US 7180943 B1, 20.02.2007 | |||
| US 5748104 A1, 05.05.1998. | |||

