ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству базовой станции, системе связи и способу синхронизации.
УРОВЕНЬ ТЕХНИКИ
В системе связи уровня техники (например, беспроводной системе PBX (телефонной системе для частного пользования)) терминал связи может перемещаться, при этом последовательно переключает устройство базовой станции (в дальнейшем называемое просто «базовая станция»), для осуществления связи с другой из множества базовых станций. Это переключение базовой станции называется «передача» (или хэндовер). Чтобы терминал связи предпочтительно проводил передачу, необходимо, чтобы множество базовых станций взаимно синхронизировали свою информацию о времени друг с другом.
В качестве способа синхронизации множества базовых станций друг с другом был известен следующий способ. Сервер информации о времени передает информацию о времени множеству базовых станций через LAN (ЛВС, локальную вычислительную сеть). Затем, каждая из базовых станций регулирует тактовый генератор, установленный в собственной базовой станции, на основании момента времени приема информации о времени и информации о времени (например, см. патентный документ 1).
Аналогичным образом, следующий способ также был известен. Мобильная станция выборочно соединяется с одной или более базовыми станциями и осуществляет связь с соединенными базовыми станциями в заданный тайминг. Среди базовых станций базовая станция, которая генерирует тайминг передачи и тайминг приема, установлена на более высоком уровне иерархии в качестве опорной станции. Другие базовые станции, отличные от опорного сигнала, выбирают базовую станцию более высокой иерархии и устанавливают тайминг передачи и тайминг приема. Базовые станции корректируют отклонение тайминга передачи и тайминга приема от базовой станции партнера синхронизации в заданные временные интервалы (например, см. патентный документ 2).
Аналогичным образом, следующий способ был известен. Сервер синхронизации передает сообщение синхронизации, включающее в себя информацию о тактовых сигналах, периодически генерируемых соответствующим базовым станциям в качестве пакетов IP. Каждая базовая станция принимает сообщение синхронизации от сервера синхронизации. Каждая базовая станция вычисляет значение коррекции тактового сигнала на основании времени, когда сообщение синхронизации получено, и информации о тактовом сигнале, предоставленной сообщением синхронизации, и корректирует тактовый сигнал на каждой базовой станции на основании значения коррекции тактового сигнала (например, см. патентный документ 3).
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
ПАТЕНТНЫЕ ДОКУМЕНТЫ
Патентный документ 1: JP-T-2003-509973
Патентный документ 2: JP-A-2002-165269
Патентный документ 3: JP-A-2004-186877
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
В обычное время каждая из базовых станций периодически принимает сигнал синхронизации, чтобы быть синхронизированной с другими базовыми станциями. С другой стороны, каждая из базовых станций выходит их синхронизации с другими базовыми станциями, если базовой станции не удается обнаружить сигнал синхронизации. В результате, каждая базовая станция может быть не в состоянии синхронизироваться с другими базовыми станциями с высокой точностью, не считая перезапуска.
В методе по патентному документу 1, когда функция тактового сигнала сервера информации о времени прекращается, множество базовых станций не может быть синхронизировано друг с другом с высокой точностью. В методе по патентному документу 2, когда функция генерирования тайминга опорной станции прекращается, множество базовых станций не может быть синхронизировано друг с другом с высокой точностью. В методе по патентному документу 3, когда функция сервера синхронизации прекращается, множество базовых станций не может быть синхронизировано друг с другом с высокой точностью.
Настоящее изобретение было предложено ввиду вышеописанных обстоятельств, и, следовательно, цель настоящего изобретения состоит в том, чтобы предложить устройство базовой станции, систему связи и способ синхронизации, в котором множество базовых станций может быть синхронизировано друг с другом с высокой точностью.
РЕШЕНИЕ ПРОБЛЕМЫ
Предложено устройство базовой станции, которое осуществляет связь с другими устройствами базовой станции посредством системы с разделением времени, при этом устройство базовой станции включает в себя: блок беспроводной связи, который осуществляет связь с другим устройством базовой станции через беспроводную сеть; блок проводной связи, который осуществляет связь с другим устройством базовой станции через проводную сеть; блок определения тайминга связи, который определяет тайминг связи сигнала связи, передаваемого блоком беспроводной связи; и блок коррекции тайминга связи, который корректирует тайминг связи, определенный блоком определения тайминга связи, причем если блоку беспроводной связи не удается принять сигнал синхронизации от другого устройства базовой станции в заданный тайминг приема, блок проводной связи передает сигнал подтверждения состояния синхронизации для подтверждения состояния синхронизации между устройством базовой станции и другим устройством базовой станции, и принимает сигнал ответа состояния синхронизации, включающий в себя результат определения состояния синхронизации, а блок коррекции тайминга связи корректирует тайминг связи на основании сигнала ответа состояния синхронизации, принятого блоком проводной связи.
В соответствии с этой конфигурацией, даже если устройству базовой станции не удается обнаружить сигнал синхронизации, переданный через беспроводную сеть, устройство базовой станции запрашивает, чтобы другое устройство базовой станции определило состояние синхронизации через проводную сеть, и может получить результат определения состояния синхронизации. Соответственно, даже если устройству базовой станции не удается принять заданный сигнал синхронизации, множество базовых станций может быть синхронизировано друг с другом с высокой точностью.
Устройство базовой станции может быть выполнено так, что если блоку беспроводной связи не удается принять сигнал синхронизации от первого устройства базовой станции в заданный тайминг приема, блок проводной связи передает сигнал подтверждения состояния синхронизации первому устройству базовой станции и принимает сигнал ответа состояния синхронизации от первого устройства базовой станции.
В соответствии с этой конфигурацией, даже если устройству базовой станции не удается обнаружить сигнал синхронизации, переданный из первого устройства базовой станции в качестве ведущего синхронизации, если проводная сеть первого устройства базовой станции действует, устройство базовой станции может получить результат определения состояния синхронизации от первой базовой станции.
Устройство базовой станции может быть выполнено так, что если блоку беспроводной связи не удается принять сигнал синхронизации от первого устройства базовой станции в заданный тайминг приема, блок проводной связи передает сигнал подтверждения состояния синхронизации второму устройству базовой станции, отличному от первого устройства базовой станции, и принимает сигнал ответа состояния синхронизации от второго устройства базовой станции.
В соответствии с этой конфигурацией, даже если устройству базовой станции не удается обнаружить сигнал синхронизации, переданный из первого устройства базовой станции в качестве ведущего синхронизации, устройство базовой станции может получить результат определения состояния синхронизации от второго устройства базовой станции. Кроме того, если проводная сеть первого устройства базовой станции не имеет связи, устройство базовой станции может получить результат определения состояния синхронизации.
Устройство базовой станции может быть выполнено так, что если блоку проводной связи не удается принять сигнал ответа состояния синхронизации в ответ на сигнал подтверждения состояния синхронизации для первого устройства базовой станции, блок проводной связи передает сигнал подтверждения состояния синхронизации второму устройству базовой станции, которое представляет собой более высокую иерархию, чем первое устройство базовой станции.
В соответствии с этой конфигурацией, устройство базовой станции может получить результат определения состояния синхронизации с более высокой точностью.
Устройство базовой станции может быть выполнено так, что блок проводной связи определяет целевое устройство базовой станции, которому передается сигнал подтверждения состояния синхронизации, на основании информации о порядке приоритета целевого устройства базовой станции, передает сигнал подтверждения состояния синхронизации определенному целевому устройству базовой станции и принимает сигнал ответа состояния синхронизации от целевого устройства базовой станции.
В соответствии с этой конфигурацией, базовая станция, которая запрашивает определение состояния синхронизации, является предварительно заданной. Следовательно, результат определения состояния синхронизации может быть получен из устройства базовой станции, подразумеваемого пользователем.
Устройство базовой станции может быть выполнено так, что блок проводной связи передает сигнал подтверждения состояния синхронизации другим устройствам базовой станции в порядке убывающего приоритета, определенного на основании информации о порядке приоритета.
В соответствии с этой конфигурацией, даже если устройство базовой станции, которое не может определить состояние синхронизации, присутствует, результат определения состояния синхронизации с высокой точностью может быть получен.
Устройство базовой станции может быть выполнено так, что сигнал подтверждения состояния синхронизации включает в себя информацию о временном положении, когда сигнал синхронизации передается от устройства базовой станции.
В соответствии с этой конфигурацией, базовая станция, которая представляет собой пункт назначения запроса определения состояния синхронизации, может распознать временное положение сигнала синхронизации, переданного устройством базовой станции источника запроса определения.
Устройство базовой станции может быть выполнено так, что сигнал подтверждения состояния синхронизации включает в себя по меньшей мере одно из информации о канале передачи и о слоте передачи, через который сигнал синхронизации передается от устройства базовой станции.
В соответствии с этой конфигурацией, базовая станция, которая представляет собой пункт назначения запроса определения состояния синхронизации, может распознать по меньшей мере одно из определенного канала передачи и определенного слота передачи сигнала синхронизации, переданного устройством базовой станции источника запроса определения, и может принимать сигнал подтверждения состояния синхронизации с высокой точностью.
Устройство базовой станции может быть выполнено так, что сигнал ответа состояния синхронизации включает в себя информацию о направлении и значении временного отклонения между устройством базовой станции и другим устройством базовой станции, которое является пунктом назначения сигнала подтверждения состояния синхронизации.
В соответствии с этой конфигурацией, устройство базовой станции источника запроса определения, которое находится в состоянии синхронизации, может распознать подробную информацию о временном отклонении от устройства базовой станции пункта назначения запроса определения, которое находится в состоянии синхронизации, и, следовательно, может быть синхронизировано с другими устройствами базовой станции с высокой точностью.
Устройство базовой станции может быть выполнено так, что блок проводной связи периодически передает сигнал подтверждения состояния синхронизации в заданные временные интервалы.
В соответствии с этой конфигурацией, вероятность определения состояния синхронизации в соответствии с сигналом подтверждения состояния синхронизации, становится высокой.
Устройство базовой станции может быть выполнено так, что блок обработки обучения измеряет временное отклонение между устройством базовой станции и другим устройством базовой станции в несинхронизированном состоянии, при котором устройство базовой станции и другое устройство базовой станции не синхронизированы друг с другом; и блок определения параметра коррекции определяет параметр коррекции для коррекции тайминга связи посредством блока коррекции тайминга связи на основании информации о временном отклонении, измеренном блоком обработки обучения.
В соответствии с этой конфигурацией, тенденция временного отклонения в несинхронизированном состоянии может быть распознана заранее.
Устройство базовой станции может быть выполнено так, что если блоку беспроводной связи не удается принять сигнал синхронизации от другого устройства базовой станции в заданный тайминг приема, блок коррекции тайминга связи корректирует тайминг связи на основании параметра коррекции, определенного блоком определения параметра коррекции.
В соответствии с этой конфигурацией, даже если сигнал синхронизации не обнаружен, тайминг связи может быть скорректирован с высокой точностью в соответствии с тенденцией временного отклонения, распознанной заранее.
Устройство базовой станции может быть выполнено так, что блок определения параметра коррекции корректирует параметр коррекции на основании сигнала ответа состояния синхронизации.
В соответствии с этой конфигурацией, может быть проверено, насколько велика точность скорректированного тайминга связи в соответствии с тенденцией временного отклонения посредством получения сигнала ответа состояния синхронизации. Также, даже если коррекция тайминга связи, соответствующая тенденции временного отклонения, недостаточна, устройство базовой станции может быть синхронизировано с другим устройством базовой станции с высокой точностью. Кроме того, устройство базовой станции может быть синхронизировано с другими устройствами базовой станции, принимая во внимание фактические среды беспроводной связи.
Устройство базовой станции может быть выполнено так, что сигнал синхронизации включает в себя информацию синхронизации для синхронизации множества устройств базовой станции друг с другом, и информацию идентификации устройства базовой станции, которое является источником сигнала синхронизации.
В соответствии с этой конфигурацией, источник сигнала синхронизации может быть распознан с более высокой точностью по сравнению со случаем, в котором сигнал синхронизации устройства базовой станции распознается только посредством сигнала синхронизации.
Устройство базовой станции может быть выполнено так, что блок беспроводной связи передает сигнал подтверждения состояния синхронизации терминалу связи, который осуществляет связь с устройством базовой станции, и принимает сигнал ответа состояния синхронизации от терминала связи.
В соответствии с этой конфигурацией, состояние синхронизации между устройством базовой станции источника запроса определения, которое находится в состоянии синхронизации, и базовой станции пункта назначения запроса определения может быть определено с использованием терминала связи.
Устройство базовой станции может быть выполнено так, что если блоку проводной связи не удается принять сигнал ответа состояния синхронизации от другого устройства базовой станции, блок беспроводной связи передает сигнал подтверждения состояния синхронизации в терминал связи.
В соответствии с этой конфигурацией, состояние синхронизации между устройством базовой станции источника запроса определения, которое находится в состоянии синхронизации, и устройством базовой станции пункта назначения запроса определения может быть определено с использованием терминала связи.
Устройство базовой станции может быть выполнено так, что сигнал подтверждения состояния синхронизации включает в себя по меньшей мере одно из информации о канале передачи и о слоте передачи, через который сигнал синхронизации передается от другого устройства базовой станции.
В соответствии с этой конфигурацией, информация об определенном временном положении сигнала синхронизации, переданного устройством базовой станции пункта назначения запроса определения состояния синхронизации, может быть распознана терминалом связи.
Устройство базовой станции может быть выполнено так, что дополнительно включает в себя блок определения состояния синхронизации, который определяет состояние синхронизации, когда блок проводной связи принимает сигнал подтверждения состояния синхронизации, где блок определения состояния синхронизации определяет состояние синхронизации на основании разницы между таймингом приема сигнала синхронизации, принятого блоком беспроводной связи, и запланированным таймингом приема сигнала синхронизации, а блок проводной связи передает сигнал ответа состояния синхронизации, включающий в себя результат определения состояния синхронизации, определенный блоком определения состояния синхронизации.
В соответствии с этой конфигурацией, когда устройство базовой станции запрашивается другим устройством базовой станции для определения состояния синхронизации, устройство базовой станции может определить состояние синхронизации с высокой точностью.
Устройство базовой станции может быть выполнено так, что блок определения состояния синхронизации определяет состояние синхронизации на основании разницы между таймингом приема информации синхронизации, включенной в сигнал синхронизации, принятый блоком беспроводной связи, и запланированным таймингом приема сигнала синхронизации.
В соответствии с этой конфигурацией, состояние синхронизации может быть определено с более высокой точностью на основании информации синхронизации, включенной в сигнал синхронизации.
Предложена система связи, в которой множество устройств базовой станции, включая первое устройство базовой станции и второе устройство базовой станции, проводят связь посредством системы с разделением времени, где первое устройство базовой станции включает в себя: блок беспроводной связи, который осуществляет связь с другим устройством базовой станции через беспроводную сеть; блок проводной связи, который осуществляет связь с другим устройством базовой станции через проводную сеть; блок определения тайминга связи, который определяет тайминг связи сигнала связи, передаваемого блоком беспроводной связи; и блок коррекции тайминга связи, который корректирует тайминг связи, определенный блоком определения тайминга связи, причем если блоку беспроводной связи не удается принять сигнал синхронизации от другого устройства базовой станции в заданный тайминг приема, блок проводной связи передает сигнал подтверждения состояния синхронизации для подтверждения состояния синхронизации между первым устройством базовой станции и вторым устройством базовой станции другому устройству базовой станции, отличному от первого устройства базовой станции, при этом другое устройство базовой станции принимает сигнал подтверждения состояния синхронизации через проводную сеть, определяет состояние синхронизации на основании разницы между таймингом приема сигнала синхронизации, принятого через беспроводную сеть, и запланированным таймингом приема сигнала синхронизации, и передает сигнал ответа состояния синхронизации, включающий в себя результат определения состояния синхронизации, блок проводной связи принимает сигнал ответа состояния синхронизации, а блок коррекции тайминга связи корректирует тайминг связи на основании сигнала ответа состояния синхронизации, принятого блоком проводной связи.
В соответствии с этой конфигурацией, даже если первому устройству базовой станции не удается обнаружить сигнал синхронизации, переданный через беспроводную сеть, первое устройство базовой станции запрашивает, чтобы другое устройство базовой станции определило состояние синхронизации через проводную сеть, и может получить результат определения состояния синхронизации. Соответственно, даже если первому устройству базовой станции не удается принять заданный сигнал синхронизации, множество базовых станций может быть синхронизировано друг с другом с высокой точностью. Также, когда другое устройство базовой станции запрашивается первым устройством базовой станции для определения состояния синхронизации, состояние синхронизации может быть определено с высокой точностью.
Система связи может быть выполнена так, что дополнительно включает в себя терминал связи, который осуществляет связь с первым устройством базовой станции, где блок беспроводной связи передает сигнал подтверждения состояния синхронизации терминалу связи, терминал связи принимает сигнал подтверждения состояния синхронизации, определяет состояние синхронизации между первым устройством базовой станции и вторым устройством базовой станции на основании разницы между таймингом приема сигнала синхронизации от первого устройства базовой станции и таймингом приема сигнала синхронизации от второго устройства базовой станции, и передает сигнал ответа состояния синхронизации, включающий в себя результат определения состояния синхронизации, а блок беспроводной связи принимает сигнал ответа состояния синхронизации от терминала связи.
В соответствии с этой конфигурацией, состояние синхронизации между устройством базовой станции источника запроса определения, которое находится в состоянии синхронизации, и устройством базовой станции пункта назначения запроса определения может быть определено с использованием терминала связи. Также, когда устройство базовой станции запрашивается первым устройством базовой станции для определения состояния синхронизации, состояние синхронизации может быть определено с высокой точностью.
Предложен способ синхронизации в устройстве базовой станции, которое осуществляет связь с другим устройством базовой станции посредством системы с разделением времени, при этом способ синхронизации содержит этапы, на которых: осуществляют связь с другим устройством базовой станции через беспроводную сеть; осуществляют связь с другим устройством базовой станции через проводную сеть; определяют тайминг связи сигнала связи, переданного блоком беспроводной связи; и корректируют определенный тайминг связи, причем если сигнал синхронизации от другого устройства базовой станции не может быть принят в заданный тайминг приема через беспроводную сеть, передается сигнал подтверждения состояния синхронизации для подтверждения состояния синхронизации между устройством базовой станции и другим устройством базовой станции, и принимается сигнал ответа состояния синхронизации, включающий в себя результат определения состояния синхронизации, и тайминг связи корректируется на основании принятого сигнала ответа состояния синхронизации.
В соответствии с этим способом, даже если устройству базовой станции не удается обнаружить сигнал синхронизации, переданный через беспроводную сеть, устройство базовой станции запрашивает, чтобы другое устройство базовой станции определило состояние синхронизации через проводную сеть, и может получить результат определения состояния синхронизации. Соответственно, даже если устройству базовой станции не удается принять заданный сигнал синхронизации, множество базовых станций может быть синхронизировано друг с другом с высокой точностью.
ПОЛЕЗНЫЕ РЕЗУЛЬТАТЫ ИЗОБРЕТЕНИЯ
В соответствии с настоящим изобретением, даже если заданный сигнал синхронизации не принимается, множество базовых станций может быть синхронизировано друг с другом с высокой точностью.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
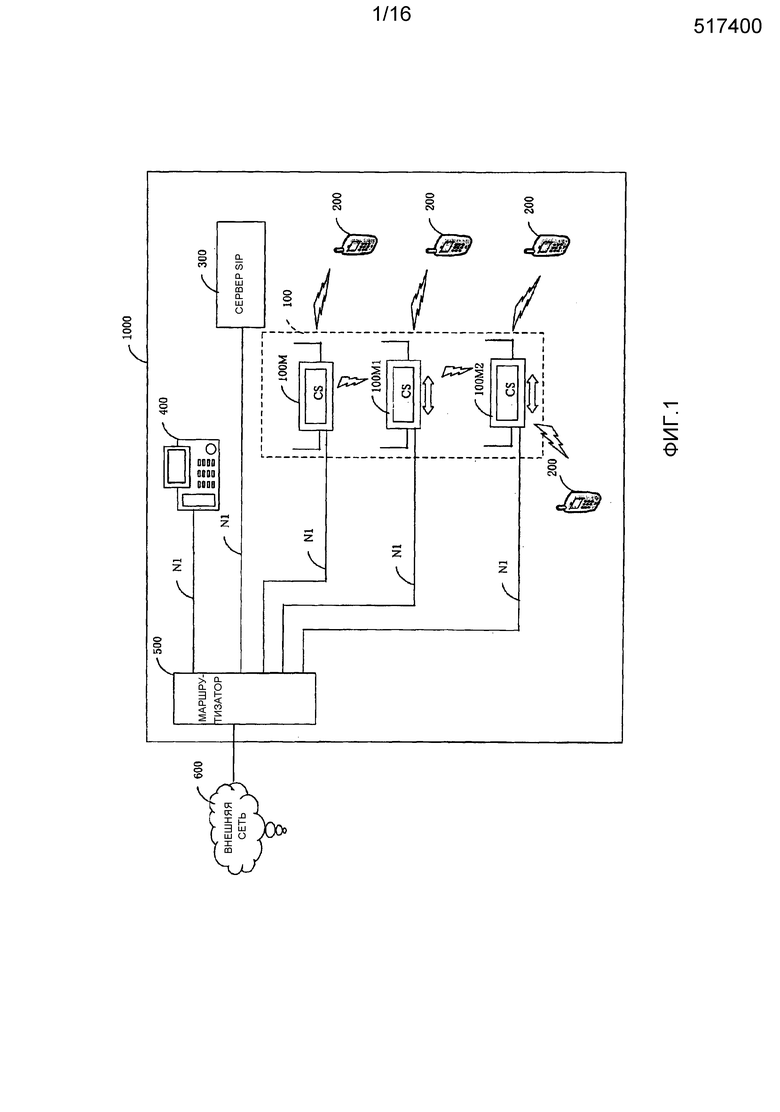
Фиг. 1 представляет собой структурную схему, иллюстрирующую пример конфигурации системы связи в соответствии с вариантом осуществления настоящего изобретения.
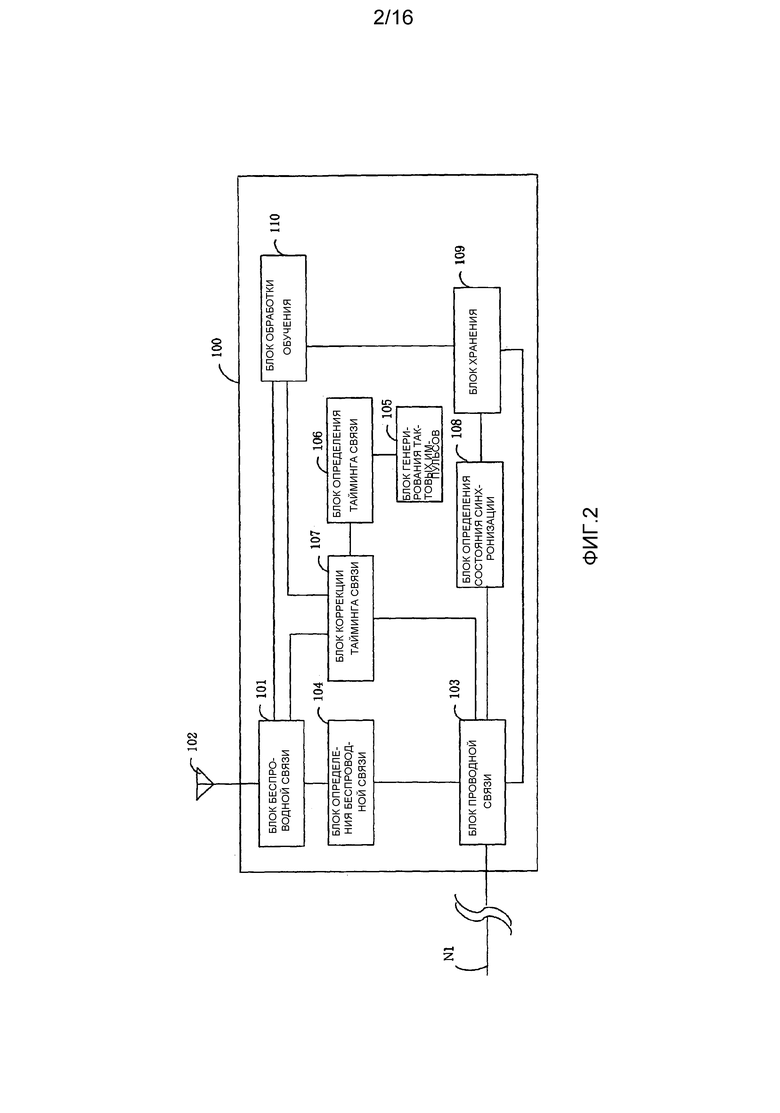
Фиг. 2 представляет собой структурную схему, иллюстрирующую пример конфигурации устройства базовой станции в соответствии с вариантом осуществления настоящего изобретения.
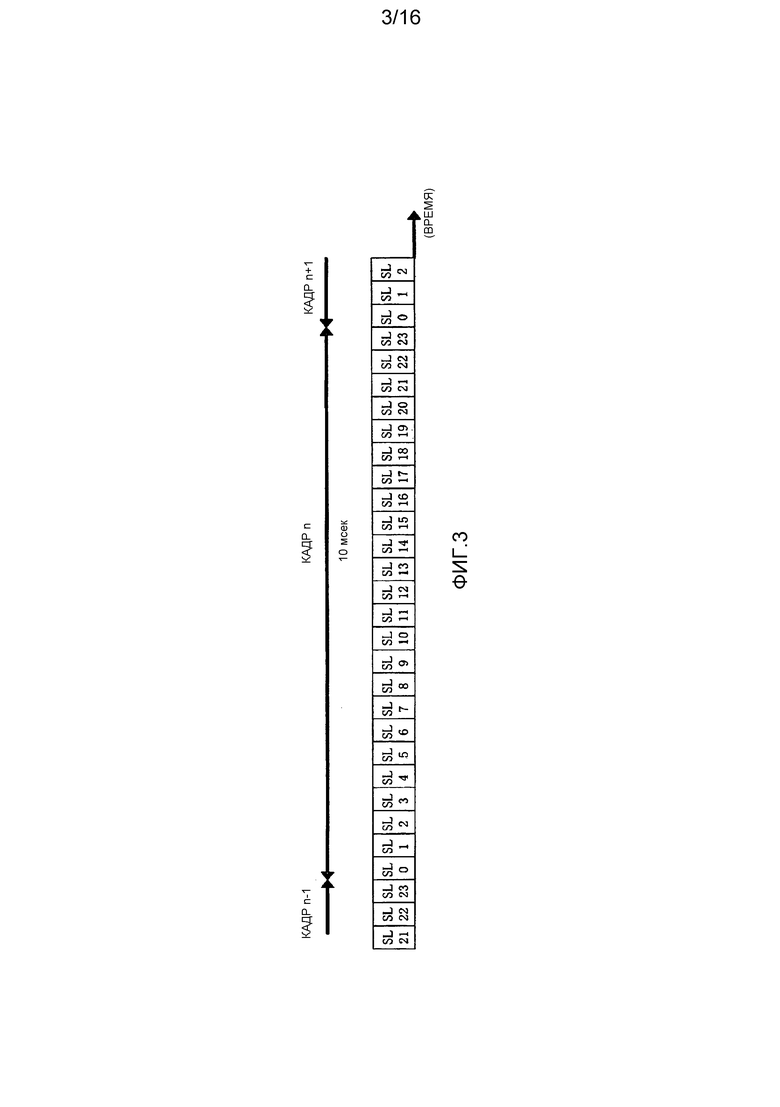
Фиг. 3 представляет собой диаграмму, иллюстрирующую пример системы с разделением времени в беспроводной связи в соответствии с вариантом осуществления настоящего изобретения.
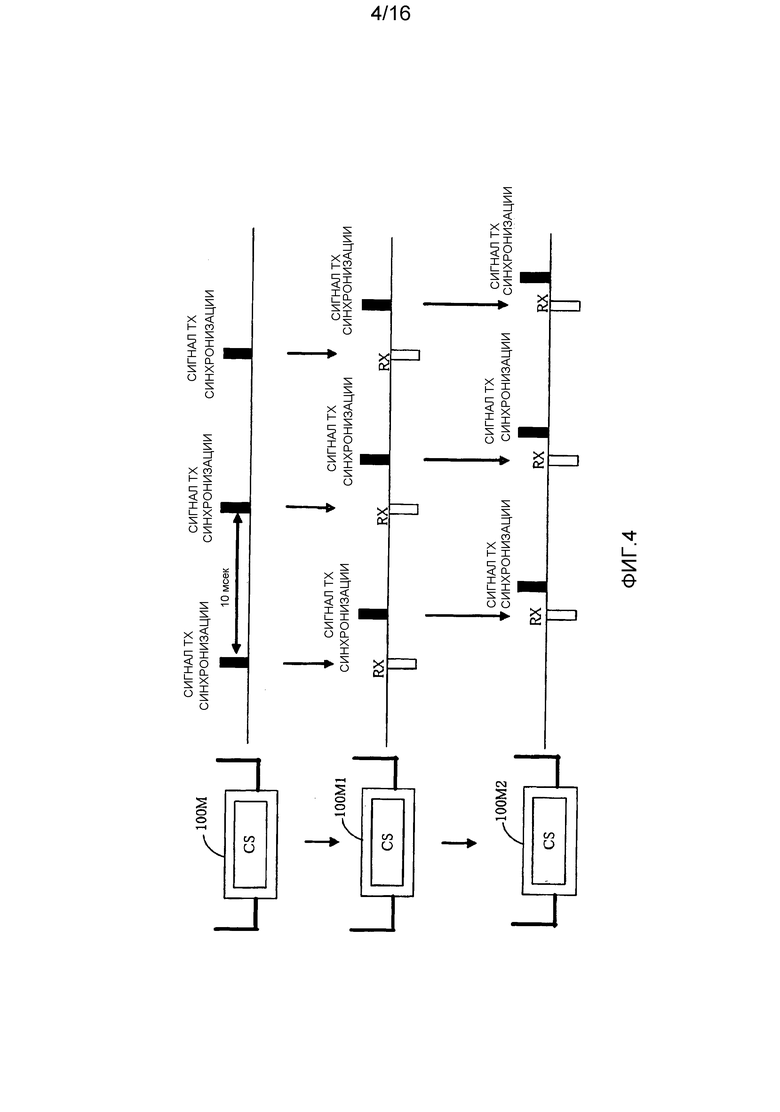
Фиг. 4 представляет собой диаграмму, иллюстрирующую пример тайминга передачи/приема сигнала синхронизации в нормальном состоянии устройства базовой станции в соответствии с вариантом осуществления настоящего изобретения.
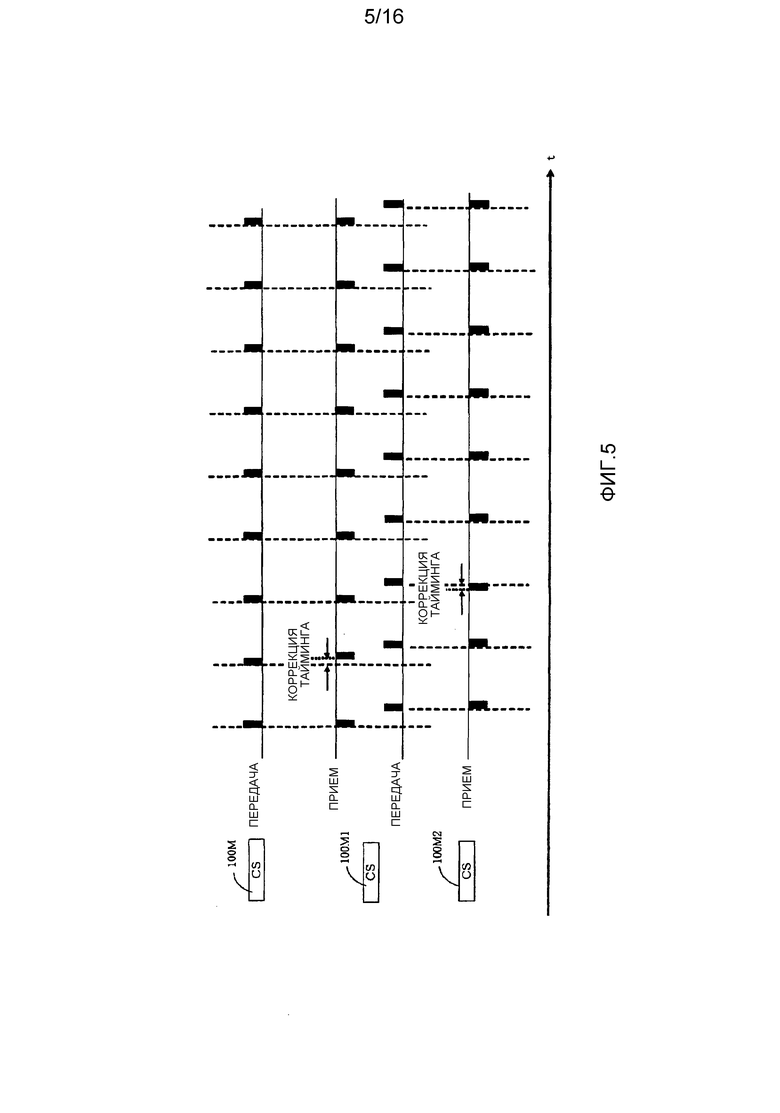
Фиг. 5 представляет собой диаграмму, иллюстрирующую пример коррекции тайминга связи в нормальном состоянии устройства базовой станции в соответствии с вариантом осуществления настоящего изобретения.
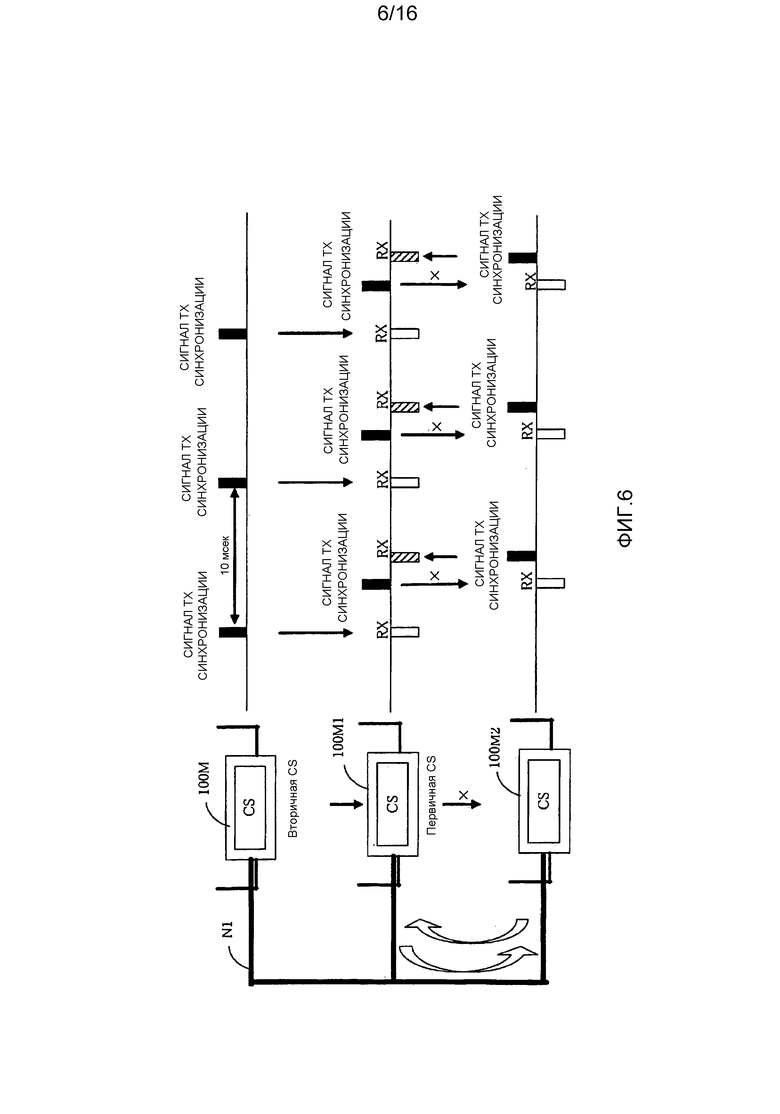
Фиг. 6 представляет собой диаграмму, иллюстрирующую пример тайминга передачи/приема сигнала синхронизации в необнаруженном состоянии устройства базовой станции в соответствии с вариантом осуществления настоящего изобретения.
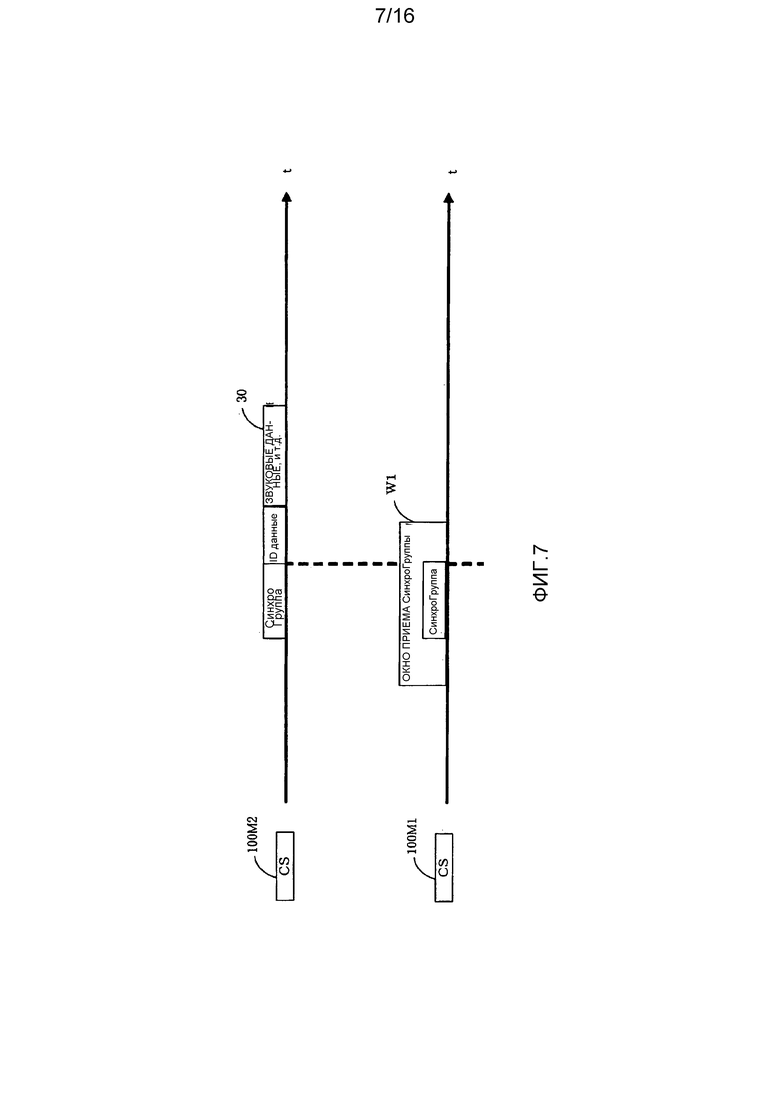
Фиг. 7 представляет собой диаграмму, иллюстрирующую пример обработки определения в состоянии синхронизации в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 8 представляет собой диаграмму, иллюстрирующую пример обработки определения в состоянии синхронизации в соответствии с вариантом осуществления настоящего изобретения:
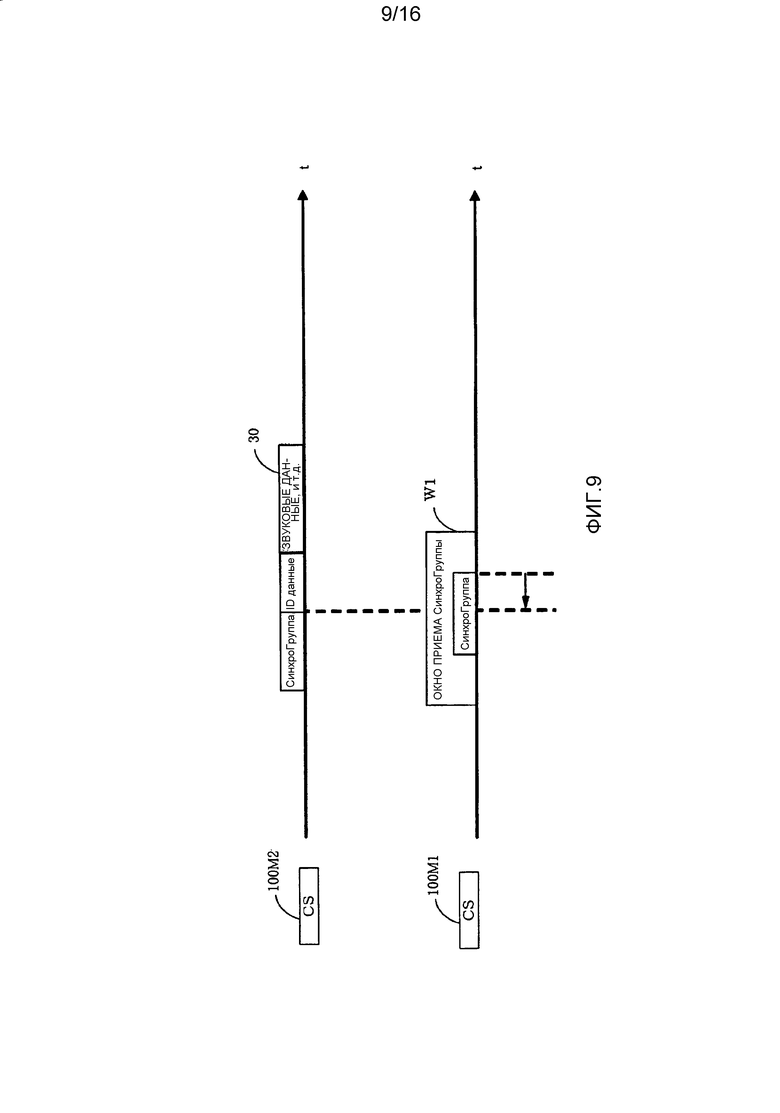
Фиг. 9 представляет собой диаграмму, иллюстрирующую пример обработки определения в состоянии синхронизации в соответствии с вариантом осуществления настоящего изобретения:
Фиг. 10 представляет собой блок-схему, иллюстрирующую пример работы в нормальном состоянии устройства базовой станции в соответствии с вариантом осуществления настоящего изобретения.
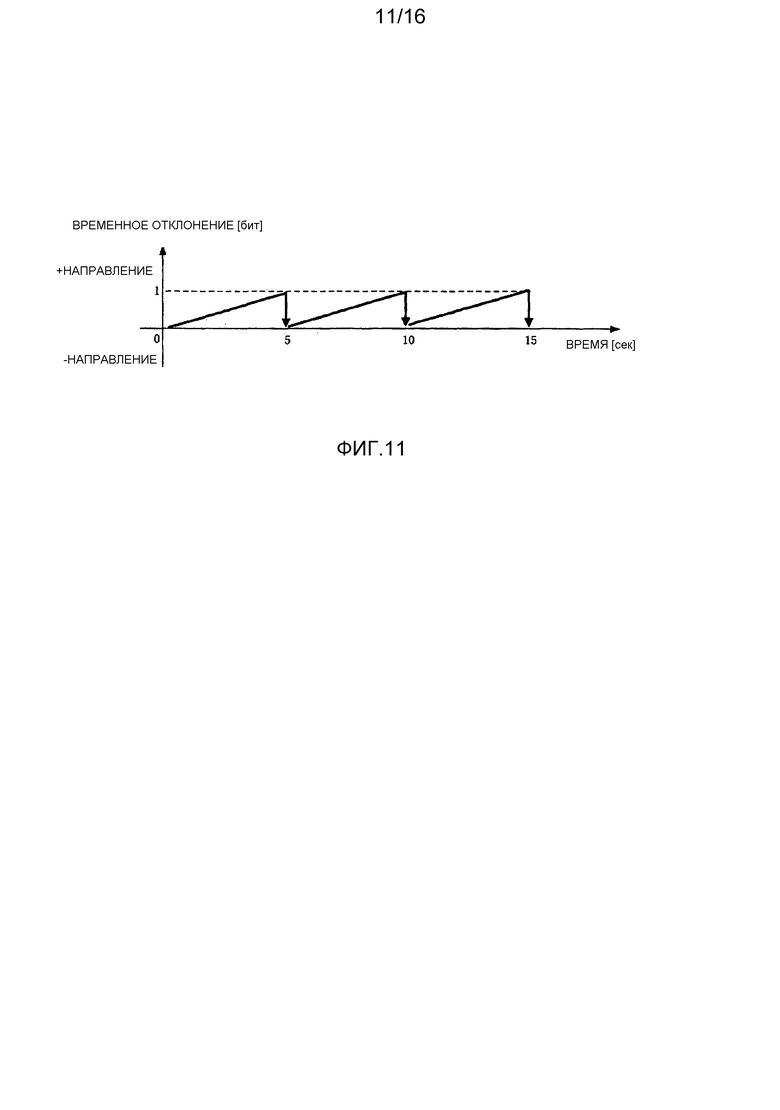
Фиг. 11 представляет собой блок-схему, иллюстрирующую пример коррекции тайминга связи с использованием параметра коррекции устройством базовой станции в соответствии с вариантом осуществления настоящего изобретения.
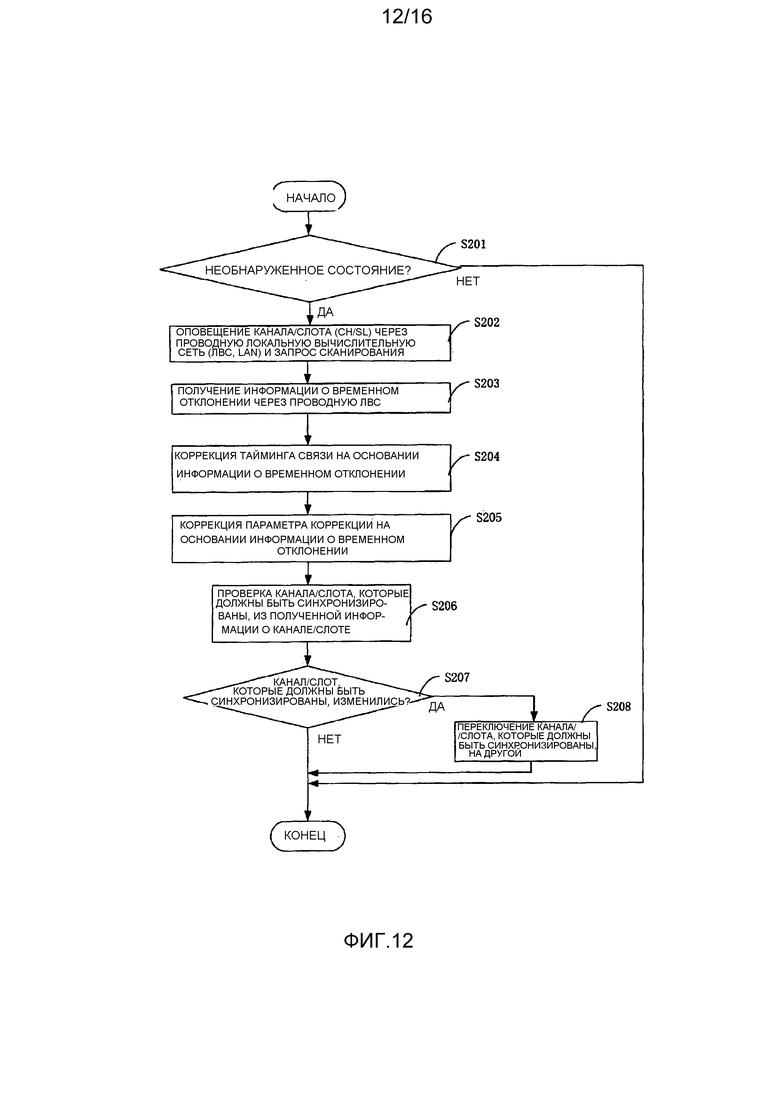
Фиг. 12 представляет собой блок-схему, иллюстрирующую пример работы в необнаруженном состоянии устройства базовой станции в соответствии с вариантом осуществления настоящего изобретения.
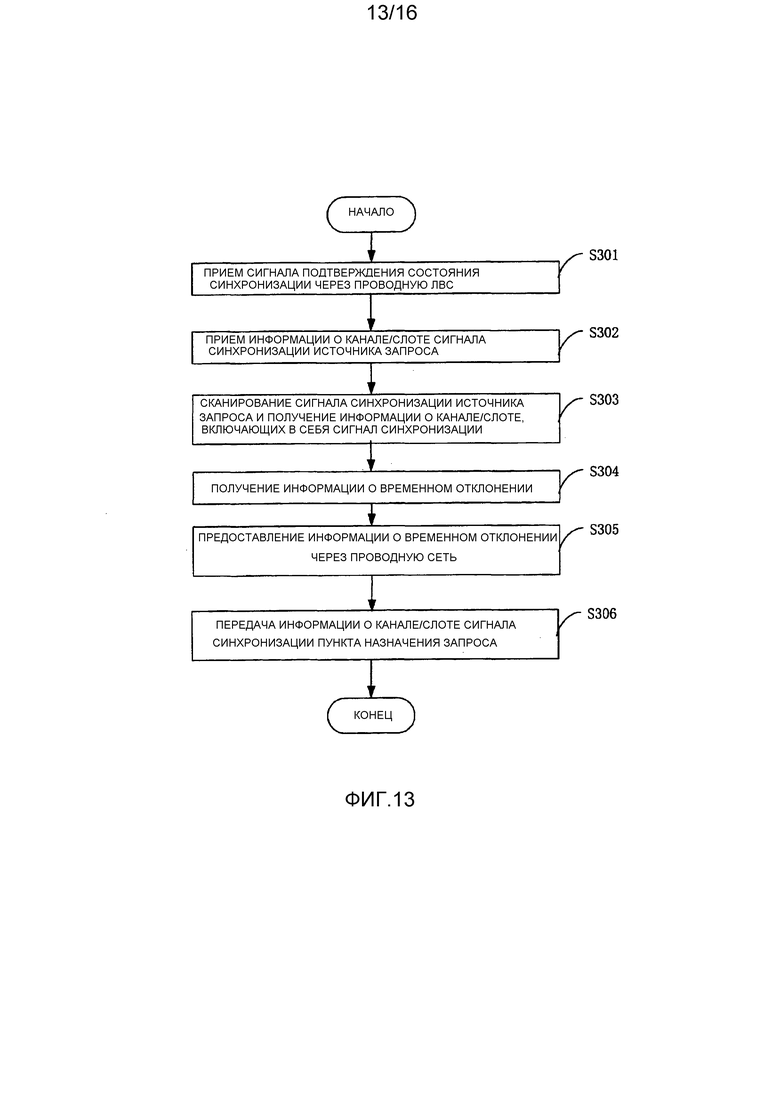
Фиг. 13 представляет собой блок-схему, иллюстрирующую пример работы при определении состояния синхронизации устройства базовой станции в соответствии с вариантом осуществления настоящего изобретения.
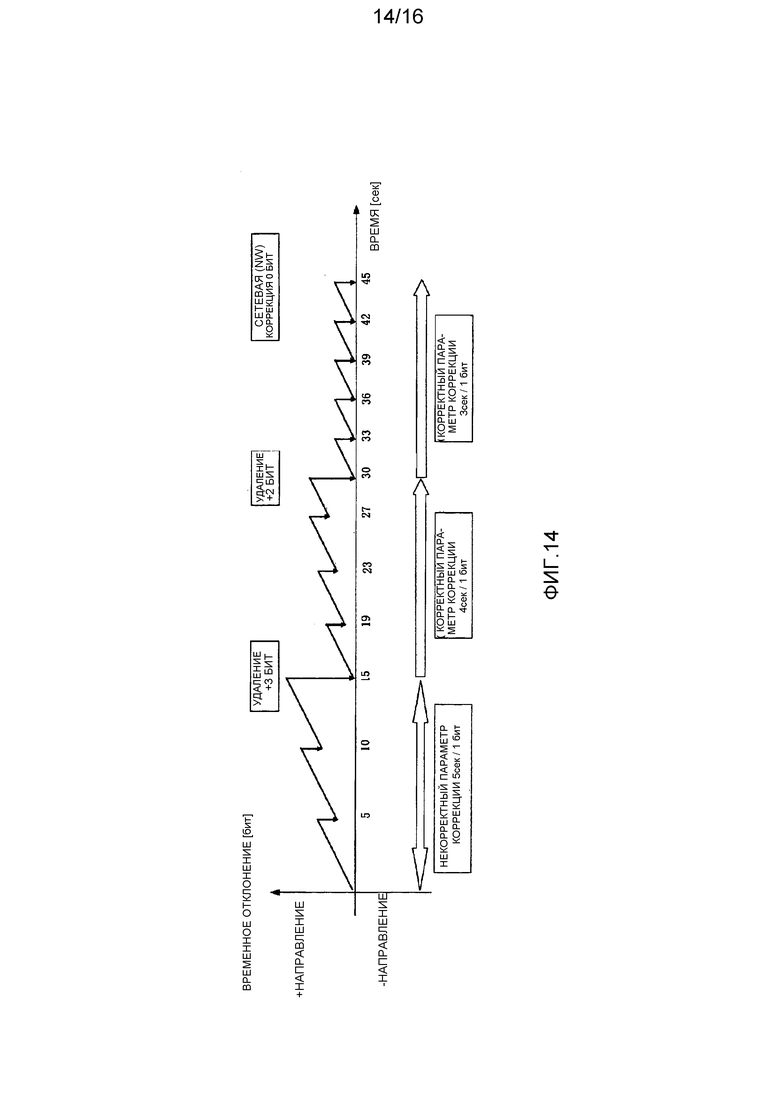
Фиг. 14 представляет собой диаграмму, иллюстрирующую пример коррекции тайминга связи и параметра коррекции посредством параметра коррекции и сетевой коррекции в устройстве базовой станции в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 15 представляет собой диаграмму, иллюстрирующую пример иерархической структуры множества устройств базовой станции в соответствии с вариантом осуществления настоящего изобретения.
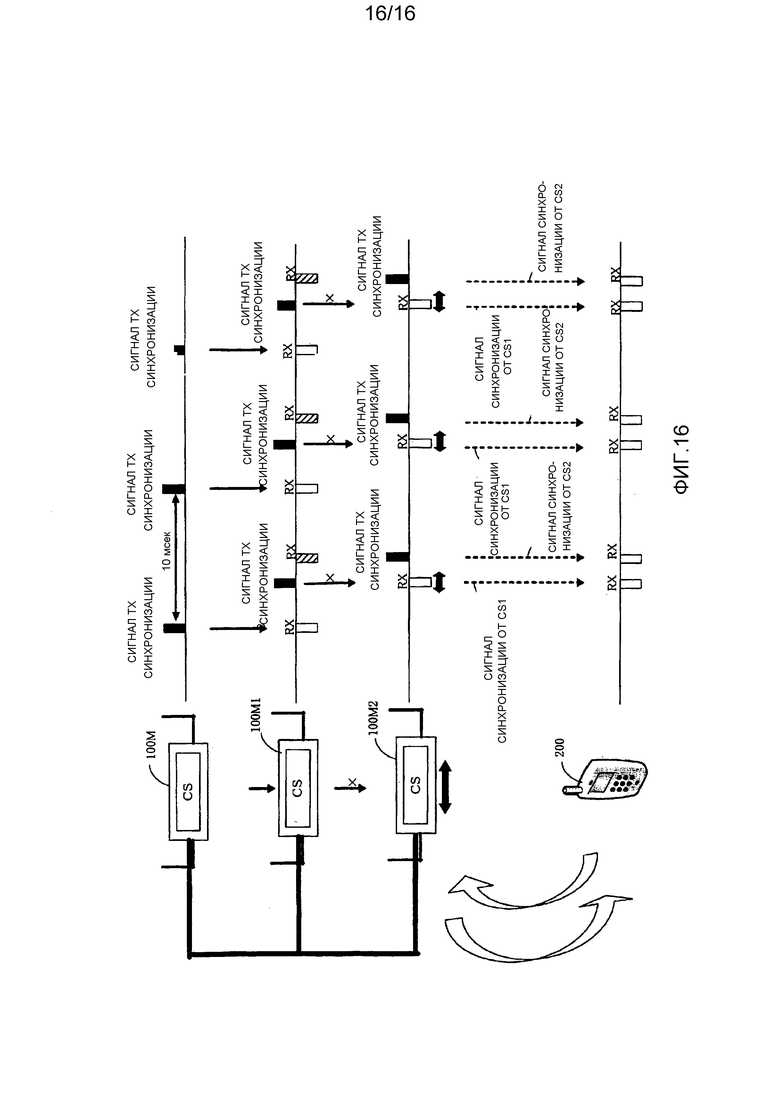
Фиг. 16 представляет собой диаграмму, иллюстрирующую пример тайминга передачи/приема сигнала синхронизации в необнаруженном состоянии устройства базовой станции, и тайминга приема сигнала синхронизации терминала связи в соответствии с вариантом осуществления настоящего изобретения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
В дальнейшем, варианты осуществления настоящего изобретения будут описаны со ссылкой на прилагаемые чертежи.
(ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ)
Фиг. 1 представляет собой диаграмму, иллюстрирующую пример конфигурации системы 1000 связи в соответствии с первым вариантом осуществления настоящего изобретения. Система 1000 связи включает в себя устройства 100 базовой станции (CS: сотовые станции), терминалы 200 связи (PS: персональные станции), сервер 300 SIP (протокол инициации сессии), телефон 400 и маршрутизатор 500.
Множество устройств 100 базовой станции иерархически присутствует в системе 1000 связи. На Фиг. 1 множество CS 100 называется CS 100M, CS 100M1 и CS 100M2. Как показано на Фиг. 1, CS 100M представляет собой устройство (ведущая CS тайминга), которое расположено на самом высоком уровне иерархии и является, например, опорой синхронизации. CS 100M1 и CS 100M2 представляют собой устройства (ведомые CS), которые расположены на более низком уровне иерархии, чем CS 100M, и работают на основании опорного сигнала синхронизации. CS 100M1 и CS 100M2 также могут быть расположены иерархически. Например, CS 100M1 расположена на более высоком уровне иерархии, чем CS 100M2.
PS 200 представляют собой подвижные терминалы связи, которые работают в качестве телефонов. PS 200 представляют собой, например, сотовые телефоны, персональные цифровые помощники (PDA) или портативные сенсорные устройства. PS 200 получают информацию о местоположении путем использования функции GPS, предоставленной в PS 200, и проводят передачу в CS 200 на основании полученной информации о местоположении.
Сервер 300 SIP связывает, например, телефонные номера с адресами IP посредством протокола SIP и выполняет обработку управления вызовами для вызова и соединения партнера по связи.
Телефон 400 представляет собой, например, внутренний телефон, который осуществляет связь с другим телефоном (например, PS 200) через сервер 300 SIP.
Маршрутизатор 500 соединяет систему 1000 связи с внешней сетью 600 и передает данные в устройствах 100 базовых станций и данные во внешней сети 600. Также, маршрутизатор 500, CS 100, PS 200, сервер 300 SIP и телефон 400 соединены друг с другом через проводную сеть (например, сеть IP).
Далее будет описан пример конфигурации CS 100.
Фиг. 2 представляет собой структурную схему, иллюстрирующую пример конфигурации CS 100.
Каждая из CS 100 включает в себя блок 101 беспроводной связи, блок 102 антенны, блок 103 проводной связи, блок 104 определения беспроводной связи, блок 105 генерирования тактовых импульсов, блок 106 определения тайминга связи, блок 107 коррекции тайминга связи, блок 108 определения состояния синхронизации, блок 109 хранения и блок 110 обработки обучения.
Блок 101 беспроводной связи осуществляет связь с другим устройством связи через блок 102 антенны и беспроводную сеть. Беспроводная сеть представляет собой, например, сеть беспроводной связи, использующую систему DECT (усовершенствованный стандарт цифровой беспроводной связи).
Блок 103 проводной связи осуществляет связь с другим устройством связи через проводную сеть. Проводная сеть представляет собой, например, проводную LAN (локальную вычислительную сеть), проводную WAN (глобальную вычислительную сеть) или линию питания.
В дальнейшем будет дано описание случая, в котором каждая из CS 100 передает и принимает сигнал подтверждения состояния синхронизации и сигнал ответа состояния синхронизации посредством блока 103 проводной связи. Например, когда CS 100 не удается принять сигнал синхронизации от ведущей CS посредством блока 101 беспроводной связи в заданный тайминг, CS 100 передает сигнал подтверждения состояния синхронизации для подтверждения состояния синхронизации в другую CS посредством блока 103 проводной связи через проводную сеть. Также, другая CS 100 принимает сигнал подтверждения состояния синхронизации, переданный из CS, которая не может принять сигнал синхронизации, через проводную сеть посредством блока 103 проводной связи.
Также, когда другая CS передает сигнал ответа состояния синхронизации в ответ на сигнал подтверждения состояния синхронизации через проводную сеть посредством блока 103 проводной связи, блок 103 проводной связи сотовой станции (CS), которая передала упомянутый выше сигнал подтверждения состояния синхронизации, принимает сигнал ответа состояния синхронизации. То есть, другая CS, которая запрашивает подтверждение посредством сигнала подтверждения состояния синхронизации, определяет состояние синхронизации посредством блока 108 определения состояния синхронизации, и передает сигнал ответа состояния синхронизации, включающий в себя результат определения, в другую CS, которая представляет собой источник запроса определения состояния синхронизации, посредством блока 103 проводной связи. Сигнал ответа состояния синхронизации включает в себя результат определения состояния синхронизации.
Блок 104 определения беспроводной связи определяет, принимает ли нормально блок 101 беспроводной связи сигнал синхронизации от ведущей CS, или нет. То есть, блок 104 определения беспроводной связи определяет, обнаруживает ли блок 101 беспроводной связи сигнал синхронизации, и принимает ли сигнал синхронизации в заданный тайминг приема, или нет. Сигнал синхронизации является необнаруженным, например, когда электропитание другой CS, которая передает сигнал синхронизации в CS, выключено, или когда радиопомехи генерируются в тайминге приема сигнала синхронизации.
Блок 105 генерирования тактовых импульсов генерирует опорные тактовые импульсы для работы соответствующих блоков в CS 100 и определения тайминга связи блока 101 беспроводной связи.
Блок 106 определения тайминга связи определяет тайминг связи сигнала связи из блока 101 беспроводной связи на основании опорных тактовых импульсов блока 105 генерирования тактовых импульсов. Сигнал связи включает в себя сигнал синхронизации для синхронизации с другой CS 100.
Блок 107 коррекции тайминга связи корректирует тайминг связи, в который блок 101 беспроводной связи осуществляет связь, например, на основании сигнала синхронизации, полученного от другой CS 100 через проводную сеть. Тайминг связи включает в себя по меньшей мере одно из тайминга передачи и тайминга приема блока 101 беспроводной связи.
Беспроводная синхронизация определенной CS 100 может быть проведена, например, в соответствии с сигналом синхронизации от другой CS 100, расположенной на более высоком уровне иерархии. Например, CS 100M1 синхронизирована с сигналом синхронизации от CS 100M, которая является ведущей для CS 100M1, а CS 100M2 синхронизирована с сигналом синхронизации от CS 100M, которая является ведущей, или CS 100M1. Соответственно, блок 107 коррекции тайминга связи каждой CS корректирует тайминг связи в соответствии с сигналом синхронизации от CS, расположенной на более высоком уровне иерархии. Когда тайминг связи скорректирован, опорные тактовые импульсы CS 100 могут быть скорректированы посредством блока коррекции тактовых импульсов, который не показан.
Также, когда блок 108 определения состояния синхронизации определенной CS запрашивается упомянутым выше сигналом подтверждения состояния синхронизации от другой CS для определения состояния синхронизации, блок 108 определения состояния синхронизации пытается принять сигнал синхронизации другой CS (источника запроса определения) в заданном слоте. Если блок 108 определения состояния синхронизации принял сигнал синхронизации, блок 108 определения состояния синхронизации измеряет отклонение между временным положением сигнала синхронизации и временным положением слота приема обсуждаемой CS, чтобы таким образом определить, является ли состояние синхронизации между другой CS (источником запроса определения) и обсуждаемой CS (CS пункта назначения запроса определения) хорошим или плохим. Подробности обработки определения будут описаны далее. Блок 108 определения состояния синхронизации передает результат определения состояния синхронизации блоку 103 проводной связи, а блок 103 проводной связи передает сигнал ответа состояния синхронизации, включающий в себя результат определения, другой сотовой станции (CS) источника запроса определения, которая находится состоянии синхронизации.
Блок 109 хранения выполнен, например, посредством ROM (постоянного запоминающего устройства) или RAM (оперативного запоминающего устройства) и хранит в себе разнообразную информацию. Например, блок 109 хранения хранит список кандидатов CS вместе с информацией о порядке приоритета, в виде кандидатов CS, которые могут быть пунктами назначения запроса определения состояния синхронизации.
Также, блок 109 хранения хранит по меньшей мере одно из информации о канале передачи и слоте передачи сигнала синхронизации другой CS в сети, или информации о запланированном тайминге приема в нем. Информация о канале передачи и слоте передачи сигнала синхронизации является примером информации о временном положении, в которое сигнал синхронизации передается. Также, блок 109 хранения хранит, например, информацию о временном отклонении, полученном посредством обработки обучения, или информацию о параметре коррекции в нем.
Блок 110 обработки обучения определяет параметр коррекции для коррекции тайминга связи в соответствии с результатом обучения, при этом последовательно обучая временное отклонение между обсуждаемой CS и другой CS в несинхронизированном состоянии. Соответственно, блок 110 обработки обучения имеет функцию в качестве блока определения параметра коррекции. Параметр коррекции используется в необнаруженном состоянии.
Блок 104 определения беспроводной связи, блок 106 определения тайминга связи, блок 107 коррекции тайминга связи, блок 108 определения состояния синхронизации и блок 110 обработки обучения реализуют соответствующие функции путем исполнения программы, хранимой в блоке 109 хранения.
Далее будет описан пример конфигурации PS 200.
Каждая из PS 200 включает в себя, например, ОЗУ (оперативное запоминающее устройство), ПЗУ (постоянное запоминающее устройство) и ЦП (центральный процессор) и имеет такую же функцию как часть функции CS 100. Например, PS 200 имеет такие же функции, как и блок 101 беспроводной связи и блок 108 определения состояния синхронизации CS 100.
Далее будет описан пример конфигурации кадра передачи данных в блоке беспроводной связи.
Блок беспроводной связи в системе 1000 связи использует систему с разделением времени, в которой один кадр содержит 10 мсек, и один кадр разделен на 24 слота, чтобы осуществлять связь, например, как проиллюстрировано на Фиг. 3. Осуществление связи системы с разделением времени включает в себя, например, осуществление связи TDMA/TDD (множественный доступ с временным разделением каналов/дуплексная связь с временным разделением каналов).
В примере, проиллюстрированном на Фиг. 3, один слот сформирован интервалом во времени, полученным равным разделением одного кадра (10 мсек) на 24 части, и любой слот назначается каждому устройству связи каждый раз, когда связь начинает осуществление связи с другим устройством связи.
Сигнал синхронизации также называется «сигналом маяка» и включает в себя данные синхронизации (например, синхрогруппу). Синхрогруппа представляет собой предварительно заданные известные шаблонные данные, которые представляют собой фиксированную последовательность цифр для синхронизации тайминга, и становится информацией синхронизации для синхронизации упомянутого выше телефона (PS 200) и другой ведомой CS друг с другом. В системе DECT определенная синхрогруппа назначается каждой сети, и синхрогруппа обычно включается в сигналы, передаваемые соответствующими терминалами, принадлежащими одной сети.
Далее будет описана обработка синхронизации в нормальном состоянии CS 100.
Фиг. 4 представляет собой диаграмму, иллюстрирующую пример тайминга передачи/приема сигнала синхронизации в нормальном состоянии CS 100. Фиг. 5 представляет собой диаграмму, пример коррекции тайминга связи в нормальном состоянии CS 100.
Нормальное состояние представляет собой состояние, в котором сигнал синхронизации периодически принимается от заданной CS 100, и синхронизация может быть проведена на основании сигнала синхронизации. Фиг. 4 и 5 иллюстрируют обработку синхронизации среди CS 100M, CS 100M1 и CS 100M2. CS 100M работает в качестве ведущей синхронизации для CS 100M1, а CS 100M1 работает в качестве ведущей синхронизации для CS 100M2.
Как проиллюстрировано на Фиг. 4, CS 100M передает сигнал синхронизации (фиктивный) в заданном интервале (например, слот 0 сигнала 30 связи) (фиктивный TX).
Также, как проиллюстрировано на Фиг. 4, CS 100M1, которая является ведомой, принимает сигнал синхронизации от CS 100M, которая является ведущей (RX) и работает в синхронизации с таймингом связи CS 100M. Также, CS 100M1 передает сигнал синхронизации сотовой станции CS 100M1 в заданном интервале (например, слот 7 сигнала 30 связи) (фиктивный TX).
CS 100M2 принимает сигнал синхронизации от CS 100M1 (RX) и работает в синхронизации с таймингом связи CS 100M1. Также, CS 100M2 передает сигнал синхронизации CS 100M2 в заданном интервале (например, слот 15 сигнала 30 связи) (TX).
Также, как проиллюстрировано на Фиг. 5, когда временное отклонение генерируется между CS 100M1 и CS 100M, CS 100M1 обнаруживает временное положение синхрогруппы, включенной в сигнал синхронизации, и немедленно корректирует тайминг связи с использованием результата обнаружения. Фиг. 5 иллюстрирует случай, в котором тайминг связи CS 100M1 задерживается от заданного тайминга.
Также, когда временное отклонение генерируется между CS 100M2 и CS 100M1, CS 100M2 корректирует тайминг связи посредством временного отклонения, включенного в сигнал синхронизации. Фиг. 5 иллюстрирует случай, в котором тайминг связи CS 100M2 уходит вперед от заданного тайминга.
CS 100M1 и CS 100M2 определяют параметр коррекции в несинхронизированном времени в соответствии с информацией о полученном временном отклонении, и хранят параметр коррекции в блоке 109 хранения.
В соответствии с обработкой синхронизации в нормальном состоянии, тайминг связи в каждой CS 100 может поддерживаться в заданном тайминге, и может поддерживаться в синхронизации.
Далее будет дано описание обработки синхронизации в необнаруженном состоянии CS 100.
Фиг. 6 представляет собой диаграмму, иллюстрирующую пример тайминга передачи/приема сигнала синхронизации в необнаруженном состоянии CS 100.
CS 100M передает сигнал синхронизации, например, в слоте 0 кадра n (TX). После того как CS 100M передает сигнал синхронизации в слоте 0 кадра n, CS 100M затем передает сигнал синхронизации в слоте 0 кадра (n+1) через 10 мсек, и после этого передает сигнал синхронизации в слоте 0 каждые 10 мсек.
CS 100M1, которая является ведомой, принимает сигнал синхронизации от CS 100M (RX) и работает в синхронизации с таймингом связи CS 100M. CS 100M1 также передает сигнал синхронизации CS 100M1, например, в слоте 7 в заданном интервале (каждые 10 мсек) (TX). В нормальных условиях CS 100M2, которая является ведомой, также принимает сигнал синхронизации от CS 100M1 и работает в синхронизации с таймингом связи CS 100M1.
На Фиг. 6 CS 100M2 не может принять сигнал синхронизации по некоторой причине, и переводится в необнаруженное состояние. CS 100M2 ожидает сигнала синхронизации от CS 100M1 до тех пор, пока не истечет заданное время с заданного тайминга, но не может принимать сигнал синхронизации. В этом случае CS 100M2 не прекращает работу, даже если CS 100M2 не может принять сигнал синхронизации, соответствующим образом корректирует тайминг связи посредством параметра коррекции, полученного в обучении в нормальном времени, и поддерживает тайминг связи с CS 100M1.
Таким образом, даже если CS 100M2 не удается принять сигнал синхронизации от CS 100M1, CS 100M1 передает сигнал синхронизации CS 100M2 в заданном интервале (например, слот 15 сигнала 30 связи) (фиктивный TX). CS 100M1, которая является ведущей, и CS 100M, которая является ведущей на более высоком уровне, чем CS 100M1, могут принимать сигнал синхронизации CS 100M2.
Также, если состояние, в котором CS 100M2 не удается принять сигнал синхронизации от CS 100M1, продолжается какое-то время (заданное время или больше), CS 100M2 передает сигнал подтверждения состояния синхронизации, запрашивающий определение состояния синхронизации, через проводную сеть. CS 100M1 или CS 100M, которая приняла сигнал подтверждения состояния синхронизации через проводную сеть, проводит обработку определения посредством блока 108 определения состояния синхронизации, и передает сигнал ответа состояния синхронизации, включающий в себя результат определения (информацию о временном отклонении) в CS 100M2 источника запроса определения. Когда CS 100M2 получает информацию о временном отклонении, включенную в сигнал ответа состояния синхронизации, через проводную сеть, CS 100M2 корректирует тайминг связи с использованием полученного временного отклонения. CS 100M2 периодически передает сигнал подтверждения состояния синхронизации, пока CS 100M2 не может принимать сигнал синхронизации, и корректирует тайминг связи с использованием временного отклонения, принятого через проводную сеть.
CS 100M2 работает, при этом корректируя тайминг связи посредством информации о временном отклонении путем периодической передачи или приема сигнала подтверждения состояния синхронизации и сигнала ответа состояния синхронизации через проводную сеть, и пытается принять сигнал синхронизации от CS 100M1 посредством беспроводной сети параллельно. Когда CS 100M2 принимает сигнал синхронизации через беспроводную сеть, CS 100M2 возвращается в нормальное состояние из необнаруженного состояния. При возвращении в нормальное состояние, CS 100M2 прекращает передачу и прием сигнала подтверждения состояния синхронизации и сигнала ответа состояния синхронизации. CS 100M2 автоматически возвращается в нормальное состояние, когда CS 100M2 могла принять сигнал синхронизации при попытке приема сигнала синхронизации, тем самым будучи способной предотвратить необязательное увеличение нагрузки сети в проводной сети.
Когда CS 100 не удается обнаружить сигнал синхронизации CS 100 более высокого уровня, CS 100 не передает сигнал подтверждения состояния синхронизации немедленно, но может провести операцию самодвижения в течение какого-то времени (заданного периода) при попытке принять сигнал синхронизации от CS 100M1 через беспроводную сеть. Операция самодвижения представляет операцию в несинхронизированном состоянии, в котором CS 100 не синхронизирована с другой CS 100. Например, когда CS 100M1 не удается обнаружить сигнал синхронизации CS высокого уровня, CS 100M1 сдвигается к операции самодвижения, корректирует тайминг связи на основании параметра коррекции, хранимого в блоке 109 хранения в течение операции самодвижения, и пытается поддержать тайминг связи.
Далее будет описана обработка определения состояния синхронизации (отклонения тайминга).
Фиг. 7-9 представляют собой диаграммы, иллюстрирующие обработку определения состояния синхронизации. Фиг. 7-9 иллюстрируют, что CS 100M1 является ведущей синхронизации CS 100M2, и CS 100M2 может быть в нормальном состоянии или в необнаруженном состоянии. Также на Фиг. 7-9 блок 101 беспроводной связи CS 100M2 передает сигнал связи посредством назначенных слотов.
Сигнал 30 связи CS 100M2 включает в себя, например, «синхрогруппу», «ID данные» и «звуковые данные». «ID данные» указывают идентификационную информацию на источнике сигнала 30 связи. «ID данные» могут быть опущены. Если «ID данные» включены в сигнал 30 связи, источник запроса определения состояния синхронизации может быть, несомненно, идентифицирован. Если «ID данные» включены в сигнал 30 связи, поскольку состояние синхронизации определяется поле того, как была выполнена проверка ID, генерируется разница во времени определения состояния синхронизации, и влияние взаимных помех может быть уменьшено. Также CS 100M1 может определять состояние синхронизации только когда «ID данные», включенные в сигнал синхронизации CS 100M2, являются действительными.
В CS 100M1 блок 108 определения состояния синхронизации устанавливает окно W1 приема для приема «синхрогруппы» сигнала синхронизации от CS 100M2. Окно W1 установлено во временной интервал, имеющий ±2 бита запланированного тайминга приема «синхрогруппы». ±2 бита являются примерными, и временной интервал может быть длиннее или короче, чем ±2 бита. Окно W1 приема, проиллюстрированное на Фиг. 7-9, является примером запланированного тайминга приема сигнала синхронизации (например, информации синхронизации).
Запланированный тайминг приема может быть предсказан на основании информации слота, запланированного для того, чтобы CS 100M2 передавала сигнал синхронизации. То есть, CS 100M1 проводит операцию приема в соответствии со слотом, запланированным для передачи сигнала синхронизации, известным заранее, и обнаруживает временное отклонение (до и после) между окном W1 приема и «синхрогруппой», фактически полученной. CS 100M1 может сохранять информацию о канале передачи и слоте передачи сигнала синхронизации от CS 100M2, или информацию о запланированном тайминге приема заранее.
Как проиллюстрировано на Фиг. 7, когда тайминг приема синхрогруппы находится, по существу, в центре окна W1 приема, блок 108 определения состояния синхронизации CS 100M1 синхронизирован с CS 100M1 и CS 100M2, и определяет, что нет временного отклонения.
Также, как проиллюстрировано на Фиг. 8, когда тайминг приема синхрогруппы временно находится в заднем конце центра окна W1 приема, блок 108 определения состояния синхронизации CS 100M1 определяет, что тайминг связи CS 100M2 отложен в большей степени, чем у CS 100M1.
Также, как проиллюстрировано на Фиг. 9, когда тайминг приема синхрогруппы временно находится в переднем конце центра окна W1 приема, блок 108 определения состояния синхронизации CS 100M1 определяет, что тайминг связи CS 100M2 находится впереди в большей степени, чем у CS 100M1.
Таким образом, блок 108 определения состояния синхронизации может определять состояние синхронизации на основании разницы между таймингом приема информации синхронизации, включенной в сигнал синхронизации, и запланированным таймингом приема информации синхронизации. В результате, блок 108 определения состояния синхронизации может определять состояние синхронизации с высокой точностью.
Когда источник запроса определения состояния синхронизации представляет собой CS 100M2, CS 100M определяет, что состояние синхронизации может быть, например, CS 100M.
Далее будет описан пример работы CS 100M в нормальном состоянии.
Фиг. 10 представляет собой блок-схему, иллюстрирующую пример работы CS 100M в нормальном состоянии.
CS 100M осуществляет обработку обучения в нормальном состоянии, и поддерживает тайминг связи посредством результата обработки обучения при переходе в необнаруженное состояние. Фиг. 10 иллюстрирует, что CS 100M2, которая является ведомой, синхронизирована с сигналом синхронизации от CS 100M1, которая является ведущей.
Сначала блок 104 определения беспроводной связи определяет, принят ли сигнал синхронизации от CS 100M1 в заданный тайминг блоком 101 беспроводной связи, или нет (Этап S101). Заданный тайминг представляет тайминг, запланированный для приема сигнала синхронизации от CS 100M1.
Когда сигнал синхронизации не принят в заданный тайминг, CS 100M2 прекращает обработку Фиг. 10 (необнаруженное состояние).
Впоследствии, блок 110 обработки обучения определяет, является ли сигнал синхронизации таймингом обучения для CS 100 для обучения, или нет, со ссылкой на таймер (Этап S102). Если сигнал синхронизации не является таймингом обучения, блок 107 коррекции тайминга связи корректирует тайминг связи на основании сигнала синхронизации, принятого блоком 101 беспроводной связи (Этап S103). Например, обучение в течение 10 секунд каждую 1 минуту определено заранее. В обработке на Фиг. 10 таймер (например, RTC (часы реального времени)), не показанный, сотовой станции (CS) 100 отсчитывает время.
С другой стороны, сигнал синхронизации принимается в заданный тайминг, и если время представляет собой тайминг обучения (да на Этапе S102), способ переходит к Этапу S104 как есть.
В тайминге обучения блок 107 коррекции тайминга связи временно прерывает коррекцию после того как тайминг связи был скорректирован, например, однажды (Этап S104). То есть, CS 100M2 намеренно генерирует несинхронизированное состояние (состояние самодвижения).
Впоследствии, блок 110 обработки обучения измеряет временное отклонение от CS 100M1 (Этап S105). Например, блок 110 обработки обучения измеряет временное отклонение между таймингом приема сигнала синхронизации от CS 100M1 и запланированным таймингом приема сигнала синхронизации от CS 100M1.
Информация об измеренном временном отклонении включает в себя направление временного отклонения и степень временного отклонения (значение временного отклонения) тайминга связи CS 100M2 к CS 100M1. Направление отклонения указывает, является ли тайминг связи CS 100M2 таймингом с опережением (-) или задержкой (+) по отношению к таймингу связи CS 100M1. Значение временного отклонения указывает величину отклонения тайминга связи между CS 100M1 и CS 100M2, и представлено, например, количеством битов или временем. Соответственно, информация о временном отклонении может быть представлена +1 битом или -1 битом.
Точность обнаружения временного отклонения составляет, например, 1/12 (бит). 1 бит представляет собой, например, 868 наносекунд. Значение временного отклонения может быть информацией об определенном количестве секунд.
Впоследствии, блок 110 обработки обучения сохраняет информацию об измеренном временном отклонении в блоке 109 хранения (Этап S106).
Впоследствии, блок 110 обработки обучения определяет, завершился ли тайминг обучения, или нет, со ссылкой на таймер (Этап S107). Например, блок 110 обработки обучения определяет, истекли ли 10 секунд от начального момента времени тайминга обучения, или нет. Если тайминг обучения не был завершен, способ возвращается к обработке этапа S105.
Впоследствии, блок 110 обработки обучения определяет, завершился ли тайминг обучения, или нет, со ссылкой на таймер (Этап S107). Например, блок 110 обработки обучения определяет, истекли ли 10 секунд от начального момента времени тайминга обучения, или нет. Если тайминг обучения не был завершен, способ возвращается к обработке этапа S105.
С другой стороны, если тайминг обучения был завершен, блок 110 обработки обучения определяет параметр коррекции тайминга связи в состоянии самодвижения, на основании информации о временном отклонении, сохраненной в блоке 109 хранения в тайминге обучения. Параметр коррекции представляет собой, например, -1 бит, когда информация о временном отклонении представляет собой +1 бит, и +1 бит, когда информация о временном отклонении представляет собой -1 бит.
Фиг. 11 иллюстрирует пример, в котором CS 100M2 корректирует тайминг связи посредством параметра коррекции через блок 107 коррекции тайминга связи. Фиг. 11 иллюстрирует, что временное отклонение генерируется +1 битом в 5 секунд в состоянии самодвижения. В этом случае параметр коррекции представляет собой -1 бит (-1 бит/5 сек) в 5 секунд.
Таким образом, CS 100M2 определяет параметр коррекции путем обучения блока 110 обработки обучения для коррекции тайминга связи в соответствии с тенденцией временного отклонения CS 100M в состоянии самодвижения. Соответственно, CS 100M может устойчиво поддерживать тайминг связи, даже если CS 100M впадает в необнаруженное состояние.
Фиг. 12 представляет собой блок-схему, иллюстрирующую пример работы CS 100M1 в необнаруженном состоянии. Фиг. 13 представляет собой блок-схему, иллюстрирующую пример работы CS 100M, которая определяет состояние синхронизации. Далее будет дано описание примера работы CS 100 в необнаруженном состоянии на основании блок-схемы Фиг. 12 и 13. В этом примере CS 100, которая находится в необнаруженном состоянии, рассматривается в качестве CS 100M1, а CS 100, которая определяет состояние синхронизации вместе с CS 100M1 при приеме запроса определения состояния синхронизации от CS 100M1, рассматривается в качестве CS 100M. В обработке на Фиг. 12 и 13 таймер (например, RTC (часы реального времени)), не показанный, CS 100 отсчитывает время.
В примерах на Фиг. 12 и 13 CS 100M1 не удается обнаружить сигнал синхронизации от CS 100M, и запрашивает в CS 100M через проводную сеть степень временного отклонения CS 100M1. Запрошенная CS 100M принимает сигнал синхронизации CS 100M1, который является источником запроса, получает информацию о временном отклонении и предоставляет CS 100M1 информацию о временном отклонении. CS 100M1 корректирует тайминг связи на основании информации о предоставленном временном отклонении. В необнаруженном состоянии CS 100M1 корректирует тайминг связи посредством параметра коррекции, определенного обработкой обучения.
Ниже блок-схема Фиг. 12 будет описана подробно. Сначала блок 104 определения беспроводной связи CS 100M1 определяет, находится ли CS 100M1 в необнаруженном состоянии, или нет (Этап S201). Например, блок 104 определения беспроводной связи определяет, принимает ли CS 100M1 сигнал синхронизации от CS 100M для заданного периода или больше, или нет. Если CS 100M1 не находится в необнаруженном состоянии, способ прекращается без проведения последующей обработки.
Когда CS 100M1 находится в необнаруженном состоянии, блок 103 проводной связи передает сигнал подтверждения состояния синхронизации, указывающий запрос для определения состояния синхронизации, через проводную сеть, как описано выше.
В этой ситуации сигнал подтверждения состояния синхронизации передается вместе с включением информации о канале (CH) и слоте (SL) для передачи сигнала синхронизации CS 100M1, чтобы запросить сканирование посредством CH и SL (Этап S202). Другая CS (например, CS 100M), которая приняла сигнал подтверждения состояния синхронизации через проводную сеть, принимает сигнал синхронизации CS 100M1 источника запроса определения и проводит обработку определения. Сигнал ответа состояния синхронизации, включающий в себя информацию о временном отклонении, передается в CS 100M1 через проводную сеть. Информация о канале и слоте для передачи сигнала синхронизации CS 100M1 источника запроса определения может быть включена в сигнал подтверждения состояния синхронизации для передачи, или может быть включена в другой сигнал связи для передачи.
Впоследствии, блок 103 проводной связи CS 100M1 принимает сигнал ответа состояния синхронизации, возвращенный от другой CS (например, CS 100M) и получает информацию о временном отклонении (Этап S203). Информация о временном отклонении включает в себя направление временного отклонения и значение временного отклонения CS 100M1 по отношению к CS 100M. Также, сигнал ответа состояния синхронизации, возвращенный от CS 100M пункта назначения запроса определения, также включает в себя информацию о канале и слоте, чтобы позволить CS 100M1 передавать сигнал синхронизации. Блок 103 проводной связи CS 100M1 принимает информацию о канале передачи и слоте передачи сигнала синхронизации CS 100M, который передается от CS 100M через проводную сеть.
Затем блок 107 коррекции тайминга связи корректирует тайминг связи на основании информации о временном отклонении от CS 100M (Этап S204). Обработка Этапов с S202 по S205 соответствует сетевой коррекции.
Затем блок 107 коррекции тайминга связи корректирует (регулирует) параметр коррекции, хранимый в блоке 109 хранения, на основании информации о временном отклонении от CS 100M (Этап S205).
Затем блок 107 коррекции тайминга связи проверяет, сопоставлять ли канал передачи и слот передачи, которые должны быть синхронизированы, или нет, на основании информации о канале передачи и слоте передачи сигнала синхронизации принятой CS 100M, и подтверждает, корректны ли слот передачи и канал передачи, которые устанавливают синхронизацию, или нет (Этап S206).
Впоследствии, в результате проверки информации о канале передачи и слоте передачи, которые должны быть синхронизированы, блок 107 коррекции тайминга связи определяет, должны ли измениться канал связи и слот связи, которые должны быть синхронизированы, или нет (Этап S207). Информация о канале передачи и слоте передачи для того, чтобы позволить CS быть синхронизированной для передачи сигнала синхронизации, хранится в блоке 109 хранения. Например, если CS должна быть синхронизирована с сигналом синхронизации CS 100M, блок 107 коррекции тайминга связи определяет, что канал передачи и слот передачи, которые должны быть синхронизированы, изменяются, если канал передачи и слот передачи полученного сигнала синхронизации отличаются от информации о канале передачи и слоте передачи, хранимой в блоке 109 хранения. Также, блок 107 коррекции тайминга связи определяет, что нет изменения, если канал передачи и слот передачи полученного сигнала синхронизации такие же, как и информация о канале передачи и слоте передачи, хранимая в блоке 109 хранения.
Если определено, что информация о канале передачи и слоте передачи изменяется, блок 107 коррекции тайминга связи переключает канал связи и слот связи, которые должны быть синхронизированы, на другие (Этап S208). Блок 107 коррекции тайминга связи сохраняет информацию о переключенном канале передачи и слоте передачи в блоке 109 хранения.
Посредством обработки на Фиг. 12 определение параметра коррекции в обработке обучения может быть скорректировано. Точность параметра коррекции в обработке обучения может быть недостаточной. Параметр коррекции в обработке обучения корректируется на основании информации о временном отклонении от CS 100M, чтобы получить параметр коррекции с высокой точностью.
Далее будет описан способ со ссылкой на Фиг. 13.
Блок 103 проводной связи CS (например, CS 100M) пункта назначения запроса определения принимает сигнал подтверждения состояния синхронизации от CS 100M1 источника запроса определения, который находится в необнаруженном состоянии (Этап S301). Также, блок 103 проводной связи CS 100M пункта назначения запроса определения принимает информацию о канале передачи и слоте передачи сигнала синхронизации CS 100M1 от CS 100M1 (Этап S302). Информация о канале передачи и слоте передачи сигнала синхронизации CS 100M1 от CS 100M1 может быть включена в сигнал подтверждения состояния синхронизации для передачи, или может быть включена в другой сигнал связи для передачи. Также, когда информация о канале передачи и слоте передачи сигнала синхронизации CS 100M1 сохраняется в блоке 109 хранения заранее, передача и прием могут быть опущены.
Впоследствии, блок 108 определения состояния синхронизации CS 100M пункта назначения запроса определения сканирует сигнал синхронизации, сгенерированный CS 100M1 источника запроса определения через блок 101 беспроводной связи и получает информацию о канале и слоте, включенную в сигнал синхронизации (Этап S303).
Впоследствии, блок 108 определения состояния синхронизации CS 100M пункта назначения запроса определения сканирует сигнал синхронизации, сгенерированный CS 100M1 источника запроса определения на основании канала и слота, принятого блоком 103 проводной связи. Блок 108 определения состояния синхронизации измеряет временное отклонение между таймингом приема сигнала синхронизации, который мог быть принят путем сканирования, и запланированным таймингом приема сигнала синхронизации от CS 100M1, чтобы таким образом определить сигнал синхронизации между CS 100M и CS 100M1. Например, блок 108 определения состояния синхронизации определяет состояние синхронизации на основании временной разницы между таймингом приема состояния синхронизации, которое могло быть принято от CS 100M1, и запланированным таймингом приема. Посредством определения состояния синхронизации блок 108 определения состояния синхронизации получает информацию о временном отклонении CS 100M1 по отношению к CS 100M (Этап S304).
Впоследствии, блок 103 проводной связи сотовой станции (CS) пункта назначения запроса определения передает информацию о временном отклонении, полученную от блока 108 определения состояния синхронизации, в CS 100M1 через проводную сеть (Этап S305). Также, блок 103 проводной связи CS 100M пункта назначения запроса определения включает в себя информацию о канале передачи и слоте передачи сигнала синхронизации, который должен быть передан посредством CS 100M непосредственно в сигнале ответа состояния синхронизации, и передает информацию в CS 100M1 (Этап S306).
Таким образом, вместе с обработкой на Фиг. 13, CS 100M пункта назначения запроса определения может предоставить уведомление об информации о временном отклонении между источником запроса и пунктом назначения запроса через проводную сеть в ответ на запрос определения состояния синхронизации от CS 100M1, которая находится в источнике запроса. Поскольку CS 100M1 находится в необнаруженном состоянии, надежность беспроводной сети низкая. Однако, CS 100M может, несомненно, предоставить уведомление об информации о временном отклонении посредством проводной сети.
Фиг. 14 иллюстрирует пример, в котором когда временное отклонение генерируется в CS 100M1, CS 100M1 источника запроса определения корректирует тайминг связи посредством параметра коррекции и сетевой коррекции, чтобы скорректировать параметр коррекции.
В примере на Фиг. 14 параметр коррекции, определенный обработкой обучения, в нормальном состоянии составляет -1 бит за 5 секунд (-1 бит/5 сек). В то время как сетевая коррекция не проводится, параметр коррекции корректируется лишь на -1 бит за 5 сек, а временное отклонение становится постепенно увеличенным.
Когда предполагается, что начальный момент времени, не имеющий временного отклонения, представляет собой 0 секунд, сетевая коррекция проводится каждые 15 секунд в примере на Фиг. 14. Когда информация о временном отклонении получена от CS 100M сетевой коррекцией, чтобы удалить +3 бита в момент времени 15 секунд, дается уведомление на проведение коррекции -3 бит. Однако из-за того, что параметр коррекции, определенный описанной выше обработкой обучения, составляет -1 бит за 5 сек, оба из значений коррекции добавляются в блоке 107 коррекции тайминга связи, чтобы скорректировать -4 бита в момент времени 15 секунд. Также, в момент времени 15 секунд блок 107 коррекции тайминга связи корректирует, например, параметр коррекции, до -1 бит (-1 бит/4 сек) за 4 сек. Приведенное выше изменение в параметре коррекции делает диапазон временного отклонения меньше.
В последующий момент времени 30 секунд, дается уведомление на проведение коррекции -2 бит, чтобы удалить +2 бита из CS 100M сетевой коррекцией. Подобным образом, в этом случае, из-за того, что параметр коррекции, определенный описанной выше обработкой обучения, составляет -1 бит за 5 сек, оба из значений коррекции добавляются в блоке 107 коррекции тайминга связи, чтобы провести коррекцию -3 бит в момент времени 30 секунд. Также, в тот же момент времени блок 107 коррекции тайминга связи корректирует, например, параметр коррекции, до -1 бит (-1 бит/3 сек) за 3 сек. В результате, временное отклонение становится, по существу, равным 0 каждые 3 сек, и сетевая коррекция (коррекция NW) становится 0 бит также в момент времени 45 секунд.
Таким образом, является ли параметр коррекции, определенный обработкой обучения, подходящим параметром или нет, может быть оценено посредством измерения временного отклонения между таймингом приема сигнала синхронизации, который может быть принят сканированием сигнала синхронизации в пункте назначения CS 100M запроса определения, и запланированным таймингом приема. Поскольку результат оценки (информация о временном отклонении) посредством CS 100M уведомляется CS 100M1 источника запроса определения, CS 100M1 может улучшить тайминг связи и параметр коррекции.
Далее будет описан порядок приоритета пунктов назначения запроса определения, которые находятся в состоянии синхронизации.
Фиг. 15 представляет собой диаграмму, иллюстрирующую пример иерархической структуры множества CS в системе 1000 связи. На Фиг. 15 предполагается, что CS2 среди множества CS (с CS0 по CS10) переходит в необнаруженное состояние.
CS2 синхронизирована с сигналом синхронизации от CS1, расположенной в иерархии одного более высокого уровня в нормальном состоянии.
Когда CS2 не удается обнаружить сигнал синхронизации от CS1, CS2 запрашивает CS 100 более высокого уровня иерархии, чем CS2, чтобы определить состояние синхронизации. Следовательно, пункт назначения запроса определения, который находится в состоянии синхронизации, CS2 является любой из CS0, CS1 и CS4. Из-за того, что CS 100 более низкого уровня иерархии, чем уровень CS2, переставляет собой устройство, в основном синхронизированное с сигналом синхронизации CS2, CS 100 находится ниже в порядке приоритета, как пункт назначения запроса, который находится в состоянии синхронизации.
Также, CS2 может запросить CS 100 той же иерархии, что и CS2, определить состояние синхронизации. В результате, опции пунктов назначения запроса определения, которые находятся в состоянии синхронизации, увеличиваются, и вероятность, что информация о временном отклонении может быть получена, увеличивается.
Также, в CS2 блок 109 хранения может сохранять информацию о порядке приоритета пунктов назначения запроса определения, которые находятся в состоянии синхронизации, в качестве списка кандидатов CS, заранее. В этом случае блок 103 проводной связи определяет пункт назначения сигнала подтверждения состояния синхронизации на основании списка кандидатов CS.
Например, порядок приоритета пунктов назначения запроса определения, которые находятся в состоянии синхронизации посредством CS2, такой: CS1, CS4, CS5, CS6 и CS3 в убывающем порядке. Причина, по которой приоритет CS3 является самым низким, заключается в том, что когда сигнал синхронизации CS1, самый высокий в приоритете, является необнаруженным, существует вероятность, что электропитание, например, CS1 выключено, или что беспроводные среды плохи, и вероятность, что сигнал синхронизации CS3 не может быть подтвержден, высока. С использованием информации о порядке приоритета, состояние синхронизации может быть подтверждено в порядке, запланированном заранее.
Кроме того, когда сигнал ответа состояния синхронизации не получен, даже если CS2 запрашивает определение состояния синхронизации до CS заданного порядка, CS может транслировать запрос определения состояния синхронизации другой CS, которая еще не запрашивала определение состояния синхронизации. В результате, CS может рано обнаружить CS 100, которая может определить состояние синхронизации, и может рано поддержать тайминг связи.
Далее будет дано описание случая, в котором CS 100 запрашивает PS 200 определить состояние синхронизации.
Фиг. 16 представляет собой диаграмму, иллюстрирующую тайминг передачи/приема сигнала синхронизации в необнаруженном состоянии CS 100M2, и тайминг приема сигнала синхронизации PS 200.
Например, когда CS 100M2 не может подтвердить сигнал подтверждения состояния синхронизации от CS 100M1 посредством блока проводной связи в необнаруженном состоянии, CS 100M2 может запросить определение состояния синхронизации через PS 200. В результате, вероятность, что состояние синхронизации может быть определено, становится высокой.
Сначала блок 101 беспроводной связи CS 100M2 запрашивает PS 200 определить состояние синхронизации. То есть, CS 100M2 передает сигнал подтверждения состояния синхронизации для подтверждения состояния синхронизации в PS 200. Например, запрос определения состояния синхронизации включает в себя информацию о по меньшей мере одном из канала передачи и слота передачи сигнала синхронизации CS 100M2, и информацию о по меньшей мере одном из канала передачи и слота передачи сигнала синхронизации CS 100M1 в качестве ведущей синхронизации. Информация о по меньшей мере одном из канала передачи и слота передачи сигнала синхронизации CS 100M1 сохраняется в блоке 109 хранения посредством CS 100M1 заранее. Проводная сеть не используется для запроса определения состояния синхронизации.
Впоследствии, PS 200 принимает запрос определения состояния синхронизации через беспроводную сеть, и получает информацию о каналах передачи и слотах передачи сигналов синхронизации CS 100M2 источника запроса и CS 100M1 пункта назначения запроса. PS 200 может запросить CS 100M1 об информации о канале передачи и слоте передачи сигнала синхронизации CS 100M1.
Впоследствии PS 200 устанавливает соответствующие окна приема, например, на основании информации о полученных соответствующих каналах передачи и слотах передачи. PS 200 принимает сигнал синхронизации CS 100M1 и CS 100M2 через беспроводную сеть.
PS 200 определяет состояние синхронизации между CS 100M1 и CS 100M на основании положений приема сигнала синхронизации в соответствующих окнах приема. PS 200 уведомляет CS 100M1 об информации о временном отклонении, включающей в себя результат определения состояния синхронизации через беспроводную сеть. Сигнал, включающий в себя информацию о временном отклонении, переданный посредством PS 200, является примером сигнала ответа состояния синхронизации.
Следовательно, CS 100M1 получает информацию о временном отклонении от PS 200 для подтверждения состояния синхронизации с другой CS 100, даже если CS 100M1 не может использовать проводную сеть между CS 100M1 и другой CS 100 (например, CS 100M).
Как проиллюстрировано на Фиг. 7-9, ID CS 100 включен в кадр передачи данных сигнала синхронизации вместе с синхрогруппой, посредством чего PS 200 может идентифицировать источник сигнала синхронизации с высокой точностью. Соответственно, точность определения состояния синхронизации посредством PS 200 может быть улучшена.
Настоящее изобретение не ограничено конфигурацией приведенного выше варианта осуществления, но может быть применено к любым конфигурациям, которые могут достичь функций, определенных формулой изобретения, или функций, предоставленных конфигурацией настоящего варианта осуществления.
Настоящая заявка основана на и испрашивает приоритет по Японской патентной заявке № 2012 096667, поданной 20 апреля 2012, содержание которой включено посредством ссылки в полном объеме.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Настоящее изобретение полезно для устройства базовой станции, сигнала связи и способа синхронизации, в котором множество базовых станций может быть синхронизировано друг с другом с высокой точностью.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
1000: Система связи
100: Устройство базовой станции (CS)
101: Блок беспроводной связи
102: Антенный блок
103: Блок проводной связи
104: Блок определения беспроводной связи
105: Блок генерирования тактовых импульсов
106: Блок определения тайминга связи
107: Блок коррекции тайминга связи
108: Блок определения состояния синхронизации
109: Блок хранения
110: Блок обработки обучения
200: Терминал связи (PS)
300: Сервер SIP
400: Телефон
500: Маршрутизатор
600: Внешняя сеть.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАБОТЫ С МОБИЛЬНЫМИ УЗЛАМИ ВО МНОЖЕСТВЕ СОСТОЯНИЙ | 2003 |
|
RU2335864C2 |
| Прием ответа произвольного доступа | 2020 |
|
RU2785977C1 |
| ПРОЦЕДУРА ПРИОРИТИЗИРОВАННОГО ПРОИЗВОЛЬНОГО ДОСТУПА | 2018 |
|
RU2774872C2 |
| СПОСОБ ПЕРЕДАЧИ ПОТОКА ДАННЫХ И МОБИЛЬНАЯ СТАНЦИЯ | 2010 |
|
RU2518509C2 |
| ПРОЦЕДУРА ПРОИЗВОЛЬНОГО ДОСТУПА С УВЕЛИЧЕННОЙ ЗОНОЙ ДЕЙСТВИЯ | 2007 |
|
RU2407155C2 |
| СПОСОБ И СИСТЕМА БЕСПРОВОДНОЙ РАДИОСВЯЗИ И СПОСОБ ПАКЕТНОЙ ПЕРЕДАЧИ | 2010 |
|
RU2534739C2 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ И СПОСОБ РАДИОСВЯЗИ | 2017 |
|
RU2731366C1 |
| СПОСОБ И УСТРОЙСТВО ПЕРЕДАЧИ ЗАПРОСА НА ПЛАНИРОВАНИЕ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2009 |
|
RU2480911C2 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ И СПОСОБ РАДИОСВЯЗИ | 2018 |
|
RU2779149C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАТНОЙ СВЯЗИ ПО КАЧЕСТВУ ЛИНИИ СВЯЗИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2002 |
|
RU2285338C2 |



Изобретение относится к беспроводной связи. Предложено устройство базовой станции, в котором множество базовых станций может быть синхронизировано друг с другом с высокой точностью, даже если устройству базовой станции не удается принять заданный сигнал синхронизации, что является техническим результатом. Устройство базовой станции включает в себя блок беспроводной связи, блок проводной связи и блок коррекции тайминга связи. Если блоку беспроводной связи не удается принять сигнал синхронизации от другого устройства базовой станции в заданный тайминг приема, блок проводной связи передает сигнал подтверждения состояния синхронизации для подтверждения состояния синхронизации между базовой станцией и другим устройством базовой станции, и принимает сигнал ответа состояния синхронизации, включающий в себя результат определения состояния синхронизации. Блок коррекции тайминга связи корректирует тайминг связи на основании сигнала ответа состояния синхронизации. 3 н. и 19 з.п. ф-лы, 16 ил.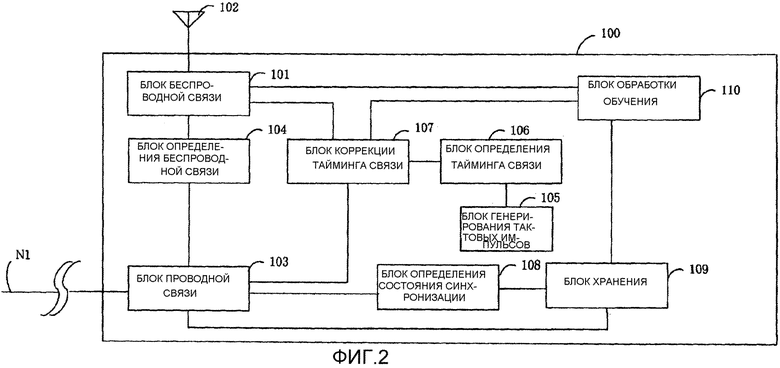
1. Устройство базовой станции, которое осуществляет связь с другим устройством базовой станции посредством системы с разделением времени, при этом устройство базовой станции содержит:
блок беспроводной связи, который осуществляет связь с другим устройством связи через беспроводную сеть;
блок проводной связи, который осуществляет связь с другим устройством связи через проводную сеть;
блок определения тайминга связи, который определяет тайминг связи сигнала связи, переданного блоком беспроводной связи; и
блок коррекции тайминга связи, который корректирует тайминг связи, определенный блоком определения тайминга связи, причем,
если блоку беспроводной связи не удается принять сигнал синхронизации от другого устройства базовой станции в заданный тайминг приема, блок проводной связи передает сигнал подтверждения состояния синхронизации для подтверждения состояния синхронизации между устройством базовой станции и другим устройством базовой станции, и принимает сигнал ответа состояния синхронизации, включающий в себя результат определения состояния синхронизации, и
блок коррекции тайминга связи корректирует тайминг связи на основании сигнала ответа состояния синхронизации, принятого блоком проводной связи.
2. Устройство базовой станции по п. 1, в котором,
если блоку беспроводной связи не удается принять сигнал
синхронизации от первого устройства базовой станции в заданный тайминг приема, блок проводной связи передает сигнал подтверждения состояния синхронизации первому устройству базовой станции и принимает сигнал ответа состояния синхронизации от первого устройства базовой станции.
3. Устройство базовой станции по п. 1 или 2, в котором,
если блоку беспроводной связи не удается принять сигнал синхронизации от первого устройства базовой станции в заданный тайминг приема, блок проводной связи передает сигнал подтверждения состояния синхронизации второму устройству базовой станции, отличному от первого устройства базовой станции, и принимает сигнал ответа состояния синхронизации от второго устройства базовой станции.
4. Устройство базовой станции по п. 3, в котором,
если блоку проводной связи не удается принять сигнал ответа состояния синхронизации в ответ на сигнал подтверждения состояния синхронизации для первого устройства базовой станции, блок проводной связи передает сигнал подтверждения состояния синхронизации второму устройству базовой станции, которое представляет собой более высокую иерархию, чем первое устройство базовой станции.
5. Устройство базовой станции по п. 1, в котором
блок проводной связи определяет целевое устройство базовой станции, которому передается сигнал подтверждения состояния синхронизации, на основании информации о порядке приоритета целевого устройства базовой станции, передает сигнал подтверждения состояния синхронизации определенному целевому
устройству базовой станции и принимает сигнал ответа состояния синхронизации от целевого устройства базовой станции.
6. Устройство базовой станции по п. 5, в котором
блок проводной связи передает сигнал подтверждения состояния синхронизации другим устройствам базовой станции в порядке убывающего приоритета, определенного на основании информации о порядке приоритета.
7. Устройство базовой станции по п. 1, в котором
сигнал подтверждения состояния синхронизации включает в себя информацию о временном положении, при котором сигнал синхронизации передается от устройства базовой станции.
8. Устройство базовой станции по п. 7, в котором
сигнал подтверждения состояния синхронизации включает в себя по меньшей мере одно из информации о канале передачи и о слоте передачи, через который сигнал синхронизации передается от устройства базовой станции.
9. Устройство базовой станции по п. 1, в котором
сигнал ответа состояния синхронизации включает в себя информацию о направлении и значении временного отклонения между устройством базовой станции и другим устройством базовой станции, которое является пунктом назначения сигнала подтверждения состояния синхронизации.
10. Устройство базовой станции по п. 1, в котором
блок проводной связи периодически передает сигнал подтверждения состояния синхронизации в заданные временные интервалы.
11. Устройство базовой станции по п. 1, дополнительно
содержащее:
блок обработки обучения, который измеряет временное отклонение между устройством базовой станции и другим устройством базовой станции в несинхронизированном состоянии, при котором устройство базовой станции и другое устройство базовой станции не синхронизированы друг с другом; и
блок определения параметра коррекции, который определяет параметр для коррекции тайминга связи посредством блока коррекции тайминга связи на основании информации о временном отклонении, измеренном блоком обработки обучения.
12. Устройство базовой станции по п. 11, в котором,
если блоку беспроводной связи не удается принять сигнал синхронизации от другого устройства базовой станции в заданный тайминг приема, блок коррекции тайминга связи корректирует тайминг связи на основании параметра коррекции, определенного блоком определения параметра коррекции.
13. Устройство базовой станции по п. 11, в котором
блок определения параметра коррекции корректирует параметр коррекции на основании сигнала ответа состояния синхронизации.
14. Устройство базовой станции по п. 1, в котором
сигнал синхронизации включает в себя информацию синхронизации для синхронизации множества устройств базовой станции друг с другом, и информацию идентификации устройства базовой станции, которое является источником сигнала синхронизации.
15. Устройство базовой станции по п. 1, в котором
блок беспроводной связи передает сигнал подтверждения
состояния синхронизации терминалу связи, который осуществляет связь с устройством базовой станции, и принимает сигнал ответа состояния синхронизации от терминала связи.
16. Устройство базовой станции по п. 15, в котором,
если блоку проводной связи не удается принять сигнал ответа состояния синхронизации от другого устройства базовой станции, блок беспроводной связи передает сигнал подтверждения состояния синхронизации в терминал связи.
17. Устройство базовой станции по п. 15, в котором
сигнал подтверждения состояния синхронизации включает в себя по меньшей мере одно из информации о канале передачи и о слоте передачи, через который сигнал синхронизации передается от другого устройства базовой станции.
18. Устройство базовой станции по п. 1, дополнительно содержащее:
блок определения состояния синхронизации, который определяет состояние синхронизации, когда блок проводной связи принимает сигнал подтверждения состояния синхронизации, причем
блок определения состояния синхронизации определяет состояние синхронизации на основании разницы между таймингом приема сигнала синхронизации, принятого блоком проводной связи, и запланированным таймингом приема сигнала синхронизации, и
блок проводной связи передает сигнал ответа состояния синхронизации, включающий в себя результат определения состояния синхронизации, определенного блоком определения состояния синхронизации.
19. Устройство базовой станции по п. 18, в котором
блок определения состояния синхронизации определяет состояние синхронизации на основании разницы между таймингом приема информации синхронизации, включенной в сигнал синхронизации, принятый блоком беспроводной связи, и запланированным таймингом приема сигнала синхронизации.
20. Система связи, в которой множество устройств базовой станции, включающих в себя первое устройство базовой станции и второе устройство базовой станции, осуществляет связь посредством системы с разделением времени, в которой
первое устройство базовой станции содержит:
блок беспроводной связи, который осуществляет связь с другим устройством связи через беспроводную сеть;
блок проводной связи, который осуществляет связь с другим устройством связи через проводную сеть;
блок определения тайминга связи, который определяет тайминг связи сигнала связи, переданного блоком беспроводной связи; и
блок коррекции тайминга связи, который корректирует тайминг связи, определенный блоком определения тайминга связи, причем,
если блоку беспроводной связи не удается принять сигнал синхронизации от другого устройства базовой станции в заданный тайминг приема, блок проводной связи передает сигнал подтверждения состояния синхронизации для подтверждения состояния синхронизации между первым устройством базовой станции и вторым устройством базовой станции другому устройству базовой станции, отличному от первого устройства базовой станции,
другое устройство базовой станции принимает сигнал подтверждения состояния синхронизации через проводную сеть,
определяет состояние синхронизации на основании разницы между таймингом приема сигнала синхронизации, принятого через беспроводную сеть, и запланированным таймингом приема сигнала синхронизации, и передает сигнал ответа состояния синхронизации, включающий в себя результат определения состояния синхронизации,
блок проводной связи принимает сигнал ответа состояния синхронизации, и
блок коррекции тайминга связи корректирует тайминг связи на основании сигнала ответа состояния синхронизации, принятого блоком проводной связи.
21. Система связи по п. 20, дополнительно содержащая:
терминал связи, который осуществляет связь с первым устройством базовой станции, причем
блок беспроводной связи передает сигнал подтверждения состояния синхронизации в терминал связи,
терминал связи принимает сигнал подтверждения состояния синхронизации, определяет состояние синхронизации между первым устройством базовой станции и вторым устройством базовой станции на основании разницы между таймингом приема сигнала синхронизации от первого устройства базовой станции и таймингом приема сигнала синхронизации от второго устройства базовой станции, и передает сигнал ответа состояния синхронизации, включающий в себя результат определения состояния синхронизации,
блок беспроводной связи принимает сигнал ответа состояния синхронизации от терминала связи.
22. Способ синхронизации в устройстве базовой станции, который осуществляет связь с другим устройством базовой станции
посредством системы с разделением времени, при этом способ синхронизации содержит этапы, на которых:
осуществляют связь с другим устройством связи через беспроводную сеть;
осуществляют связь с другим устройством связи через проводную сеть;
определяют тайминг связи сигнала связи, переданного блоком беспроводной связи; и
корректируют определенный тайминг связи, при этом,
если сигнал синхронизации от другого устройства базовой станции не может быть принят в заданный тайминг приема через беспроводную сеть, передают сигнал подтверждения состояния синхронизации для подтверждения состояния синхронизации между устройством базовой станции и другим устройством базовой станции, и принимают сигнал ответа состояния синхронизации, включающий в себя результат определения состояния синхронизации, и
корректируют тайминг связи на основании принятого сигнала ответа состояния синхронизации.
| US 6816510 B1, 09.11.2004 | |||
| СИСТЕМА И СПОСОБ ОБЕСПЕЧЕНИЯ СИНХРОНИЗАЦИИ БАЗОВЫХ СТАНЦИЙ В АСИНХРОННОЙ СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ МНОЖЕСТВЕННОГО ДОСТУПА С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1999 |
|
RU2241312C2 |
| СПОСОБ СИНХРОНИЗАЦИИ СИГНАЛОВ БАЗОВЫХ СТАНЦИЙ В СИСТЕМЕ РАДИОСВЯЗИ | 2002 |
|
RU2218667C2 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| НОЖ ДЛЯ ИЗМЕЛЬЧЕНИЯ КРОМКИ ПРОКАТА | 2005 |
|
RU2293629C1 |

