Настоящее техническое решение относится к антенным системам подвижных средств спутниковой связи - абонентским земным станциям (АЗС) и может быть использовано для организации радиолиний при работе через спутники связи, находящихся на геостационарной и высокоэллиптической орбитах (ГСО и ВЭО) в движении.
Особенностью антенн подвижных АЗС систем спутниковой связи (ССС), размещаемых на транспортном средстве, является способность автоматически наводить луч на спутник связи, находящийся на геостационарной орбите (ГСО) или высокоэллиптической орбите (ВЭО) и удерживать наведение в движении транспортного средства. Автоматическое наведение луча осуществляет система слежения антенны.
Высокоточное отслеживание спутников связи с подвижных платформ, требуется, как для оптимизации скорости передачи данных, т.е. получение пиковой энергии на радиолиниях «вверх», «вниз», так и для предотвращения помех спутникам, находящимся на орбите рядом с целевым спутником.
АЗС подвижной спутниковой связи могут размещаться на наземном транспортном средстве (автомобиль, автобус, поезд, военная транспортная техника и т.д.), морском (водном) транспортном средстве, воздушных носителях, таких как, самолет, вертолет, БПЛА, дирижабль, аэростат и т.д. В качестве спутника связи может использоваться спутник, находящийся, как на ГСО, так и на негеостационарной орбите (НГСО) - ВЭО или низкой круговой орбите (НКО).
По способу слежения системы делятся на механические, электронные и комбинированные (гибридные), последние соединяют достоинства механического и электронного способа слежения.
Механические способы наведения и слежения лучом антенны за спутником имеют разнообразные кинематические схемы с использованием разнообразных датчиков измерения пространственного положения и движения подвижной платформы и антенной системы, в частности. На эту тему известны патенты «Способ точного отслеживания и связи со спутником с передвижной платформы»" (US 6483458 В1 опуб. 19.11.2002), «Система слежения за антенной» (US 5900836 опуб. 04.05.1992), «Антенное устройство и способ управления ориентацией» (KR 920010206 В1 опуб. 21.11.1992).
К датчикам относятся приборы спутниковой системы навигации (ГНСС), всевозможные компасы, инклинометры, 3-х, 6-ти, 9-ти-осные инерциальные датчики - трехосные гироскопы и т.д., датчики измерения амплитуды принимаемого сигнала.
Недостаток данного способа - низкая точность, конструктивная громоздкость, высокая инерционность, что приводит к значительным временным задержкам в линии связи и низкой помехозащищенности. Данный способ использовался в основном на заре эры подвижных терминалов применительно к системам непосредственного спутникового вещания, но не утратил актуальности и в настоящее время в связи с бурным развитием датчиков положения и повышения их точности и быстродействия.
Электронные способы слежения предполагают наличие разбиения антенной апертуры на субапертуры, амплитуда и фаза возбуждения (сложения сигналов) от субапертур регулируется фазосдвигающими устройствами или устройствами временной задержки сигнала на несущей или промежуточной частоте. Данная регулировка обеспечивает пространственное положение луча диаграммы направленности (ДН) антенны. Информация о направлении луча и его пространственной стабилизации решается за счет тех же измерительных датчиков, что и в механическом способе, описанных, например, на сайте компании Xphased (www.xphased.com), в патенте «Система и способ формирования цифрового луча» (US 20190089434 опуб. 21.03.2019), патенте «Морской терминал спутниковой связи с фазированной антенной решеткой» (CN 111130627 А), либо за счет электронной системы поиска и захвата радиосигнала от нужного спутника связи. Все операции по обнаружению, захвату и удержанию сигнала осуществляются электронным образом без использования механического перемещения антенны. Для широкоугольного поиска и захвата способ предполагает использование антенн типа фазированная антенная решетка (ФАР) с шагом размещения антенных элементов, обеспечивающих требуемый угловой сектор поиска, что требует размещения каналов управления амплитудой и фазой в каждом антенном элементе фазированной антенной решетки. В качестве методов поиска спутника используются разнообразные методы обзора пространства, например метод конического сканирования по спирали, либо методы ступенчатого расширения ДН с понижением энергетических характеристик, описанный в патенте «Схема ускоренного захвата спутников» (RU 2756402 опуб. 30.09.2021).
Для захвата и автоматического углового сопровождения используются, как амплитудные методы, например, «Способ амплитудной пеленгации источников радиосигналов» (RU 2596018, опуб. 27.08.2016) - простой поиск максимума сигнала при сканировании лучом ограниченного углового сектора, а также моноимпульсные способы с формированием суммарно-разностной ДН, так и фазовые методы, т.е. определение угла рассогласования электрической оси с наклоном волнового фронта по измеренной разности фаз в соседних субапертурах, описанные в патентах - «Бортовая антенная система с управляемой поляризацией для сопровождения спутников» (ЕА 017031 В1 опуб. 28.09.2012), «Фазированная антенная решетка и способ управления фазированной антенной решеткой» (ЕА 026840 В1 опуб. 31.05.2007). Угловое разрешение в фазовых методах будет в основном зависеть от отношения сигнал/шум и расстояния между фазовыми центрами субапертур (пеленгационная база) - «Фазовый пеленгатор» (RU 2684321 опуб. 08.04.2019).
Достоинство данного способа - это отсутствие подвижных частей антенной системы и, как, следствие, меньший вес, габариты; более высокое быстродействие системы слежения, высокая точность слежения, меньшие задержки сигнала возникающие в линии связи, гибкость в применении разнообразных алгоритмов захвата и слежения, электронное управление вектором поляризации на прием и передачу.
Недостатком является высокая стоимость, высокое энергопотребление, так как КПД современных ФАР недостаточно высокое, а также существенное снижение энергетических характеристик ФАР при отклонении луча от нормали к апертуре, что должно компенсироваться увеличением размера апертуры ФАР, что также сказывается на стоимости. Существует зависимость характеристик ФАР от азимутального разворота платформы, если только форма раскрыва ФАР не является симметричной.
Комбинированные (гибридные) способы захвата и слежения в антенной системе подвижной спутниковой связи, как правило, могут использовать комбинацию механического способа наведения луча антенны в одной плоскости (двух плоскостях), например в азимутальной, и электронного способа по углу места с использованием плоских фазированных антенных решеток. Дополнение системы слежения электронным сканированием существенно может упростить конструкцию электромеханических приводов, а, в свою очередь, возможность механического разворота ФАР по азимуту и углу места может снизить технические требования к сектору электронного сканирования, т.е. уменьшить количество фазовых центров в антенне, что положительно скажется на ее стоимости. В данной системе широко используют датчики пространственного положения антенны, что в комбинации с электронным сканированием повышает быстродействие и точность удержания антенного луча на спутнике связи. Электронная система наведения луча позволяет использовать широкий спектр алгоритмов захвата и удержания луча на спутнике в процессе движения и электронного формирования вектора поляризации. Это могут быть как амплитудные, моноимпульсные, так и фазовые алгоритмы.
Достоинство гибридного способа заключается в гибком, компромиссном подходе к построению системы слежения антенной системы подвижного терминала спутниковой связи.
Данное техническое решение по реализации системы слежения антенной системы подвижной земной станции спутниковой связи относится к гибридному способу слежения за спутником связи с использованием узкополосного радиосигнала маяка, излучаемого спутником.
Ближайшим аналогом является система слежения для плоской мобильной антенны, описанная в патенте «Система слежения для плоской мобильной антенны» (US 7880674 В2 опуб. 07.12.2006), принадлежащему компании Ray Sat Cyprus Ltd, правопреемник Gilat, Израиль. Целью данного изобретения является обеспечение недорогой системы слежения, которая удерживает луч антенны в направлении к выбранному спутнику, независимо от движения транспортного средства, где он установлен. Также желательно, чтобы ориентация антенны сохранялась даже во время временных перерывов приема из-за непрозрачных для радиоволн препятствий, таких как здания, деревья, туннели, мосты, холмы и т.д.
Для достижения этих и других преимуществ аналог содержит:
- датчики угловой скорости (гироскопы);
- датчики, которые измеряют ориентацию антенны по отношению к вертикальной оси (инклинометры);
- блок управления, который вычисляет необходимые поправки направления луча антенны в зависимости от измерений с вышеупомянутых датчиков;
- по крайней мере, один двигатель, который изменяет ориентацию антенны;
- управляющую электронику, которая приводит в действие двигатель/двигатели для перемещения антенны в желаемом направлении;
- блок для электронного управления (наведения) лучом;
- блок питания, который преобразует напряжение из электрической сети транспортного средства в подходящие значения для обеспечения электропитания всех блоков системы.
В изобретении используются три датчика угловой скорости, каждый из которых установлен параллельно одной из осей декартовой системы координат связанной с осями антенной панели. Выполняется прямое преобразование координат для получения необходимых поправок азимута и угла места для луча антенны и обратное преобразование координат для получения поправок смещения гироскопа.
Панели антенны механически перемещается на небольшой угол по одной оси отклонения луча антенны (азимуту), в то время, как луч антенны позиционируется электронным управлением в фиксированных положениях по другой оси (углу места) с использованием фазирования панелей антенны, а уровень сигнала измеряется в двух или более положениях в непосредственной близости от направления на спутник и используется для регулировки ориентации луча антенны. Луч антенны управляется таким образом, чтобы он оставался в течение более длительного периода в фиксированном положении, которое ближе всего к направлению на спутник, в то время, как он переключается на соседние фиксированные положения на гораздо более короткие промежутки времени, таким образом, максимизируя среднюю мощность сигнала. Преимуществами системы слежения, согласно данному изобретению, являются: использование недорогих датчиков, уменьшенное влияние ошибок гироскопа на ошибку слежения, улучшенная скорость исправления ошибок гироскопа с использованием измеренной силы принятого сигнала по сравнению с антеннами с механическим перемещением луча, улучшенное среднее отношение сигнал/шум (SNR) из-за более длительных периодов, когда луч антенны удерживается близко к направлению на спутник.
Недостатками данного технического решения являются:
- достаточно сложная и дорогостоящая электромеханическая система азимутального позиционирования, так как погрешность наведения не более 0,3° должна обеспечиваться приводами антенны;
- фазирование панелей для отклонения по углу места приводит к сильным искажениям суммарной диаграммы направленности, как следствие, к снижению коэффициенту усиления антенны, уровня боковых лепестков в угломестном сечении и снижению отношения сигнал/шум, небольшой сектор электронного отслеживания;
-метод перестановки луча в области положения спутника для подстройки ориентации луча по уровню принимаемого сигнала требует более значительного времени накопления для обеспечения необходимой энергетики, что вызывает временные задержки в системе слежения и ее инерционность.
Задачей, на решение которой направлено заявляемое техническое решение (изобретение), является создание надежной системы слежения антенны, при ее экономичности.
Данная задача решается за счет того, что заявлена система слежения антенны земной станции подвижной спутниковой связи, характеризующаяся тем, что включает в себя, как минимум, одну пару приемной и передающей антенн, представляющих собой фазированные антенные решетки, состоящие из групповых двухполяризационных антенных элементов в виде антенной решетки из, как минимум, четырех парциальных антенных элементов, объединенных как минимум, двумя сумматорами и делителями для каждой поляризации, причем каждый поляризационный канал группового антенного элемента фазированной антенной решетки управляется электронным способом по амплитуде и фазе для формирования вектора поляризации и наклона лучей по команде от блока цифровой обработки по результатам обработки цифровых данных фазового пеленгатора.
В частном случае, фазовый пеленгатор встроен в конструкцию приемной ФАР за счет разбиения приемной фазированной антенной решетки на четыре подрешетки, образующие антенные квадранты, часть сигналов от которых поступает на формирование информационного луча, а часть на фазовые детекторы выделяющие сигналы пропорциональные рассогласованию углового положения луча и спутника связи.
А также заявлен способ слежения антенной системы земной станции подвижной спутниковой связи, характеризующийся тем, что сначала проводят предварительное наведение луча антенны, которое осуществляется электромеханическим способом по данным эфемерид спутника, текущему положению абонентской земной станции, исходя из информации приемника спутниковой навигационной системы, а также данных датчиков пространственной ориентации и движения, а точное наведение и сопровождение в движении происходит за счет двухкоординатного электронного наведения приемного и передающего лучей фазированной антенной решетки с использованием цифровых данных двухканального с ортогональными базами фазового пеленгатора узкополосного радиосигнала маяка спутника, причем передающий и приемный лучи антенной системы по которым передается полезная информация, непрерывно удерживаются на спутнике с погрешностью не более 0,3° по азимуту и 1° по углу места в угловом секторе электронного сопровождения - азимут×угол места равен ±3°×±40°, обеспечивая максимальную энергетику сеанса связи и защиту от помех с соседними спутниками.
В частном случае что процесс предварительного электромеханического наведения и процесс захвата, и удержания с высокой угловой точностью с использованием двухкоординатного электронного формирования приемного и передающего лучей фазированной антенной решетки осуществляются одновременно и независимо друг от друга.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является повышение точности наведения и удержания приемного и передающего лучей на спутнике при минимальной инерционности, максимальном отношении сигнал/шум и максимальной защите от помех с соседними спутниками и при обеспечении одновременной электронной подстройки вектора поляризации.
Сущность изобретения поясняется чертежами, на которых изображено:
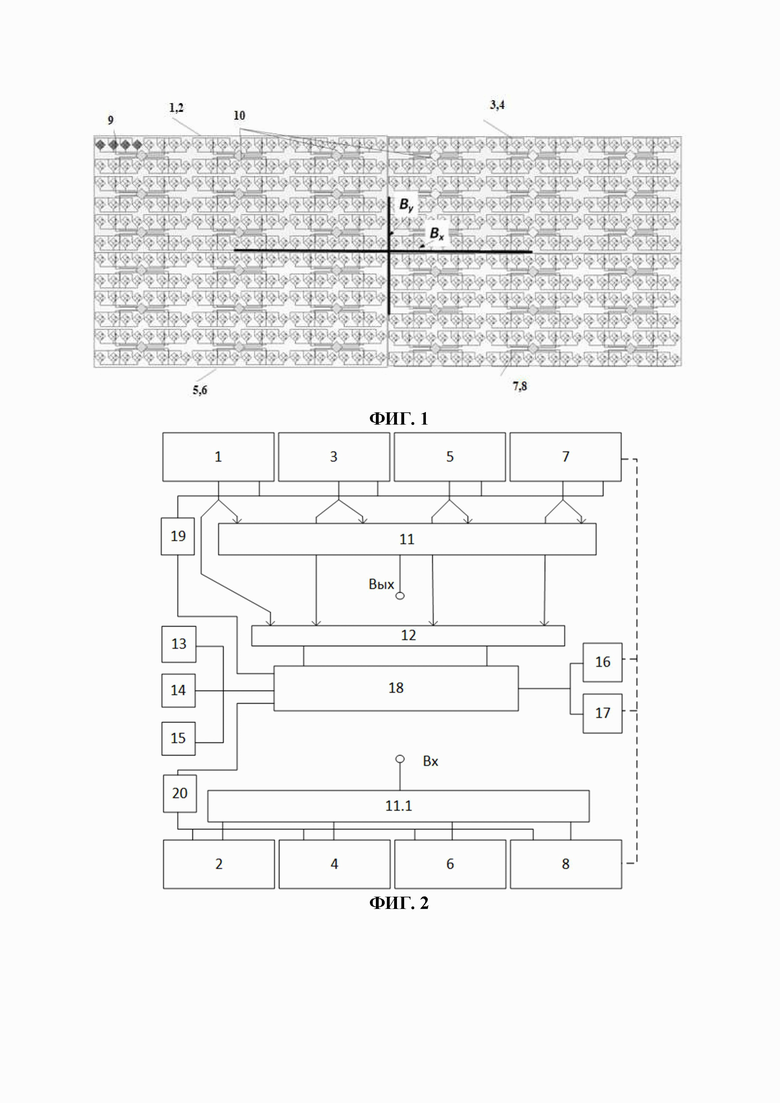
Фиг. 1 - изображена топология приемной и передающей фазированных антенных решеток;
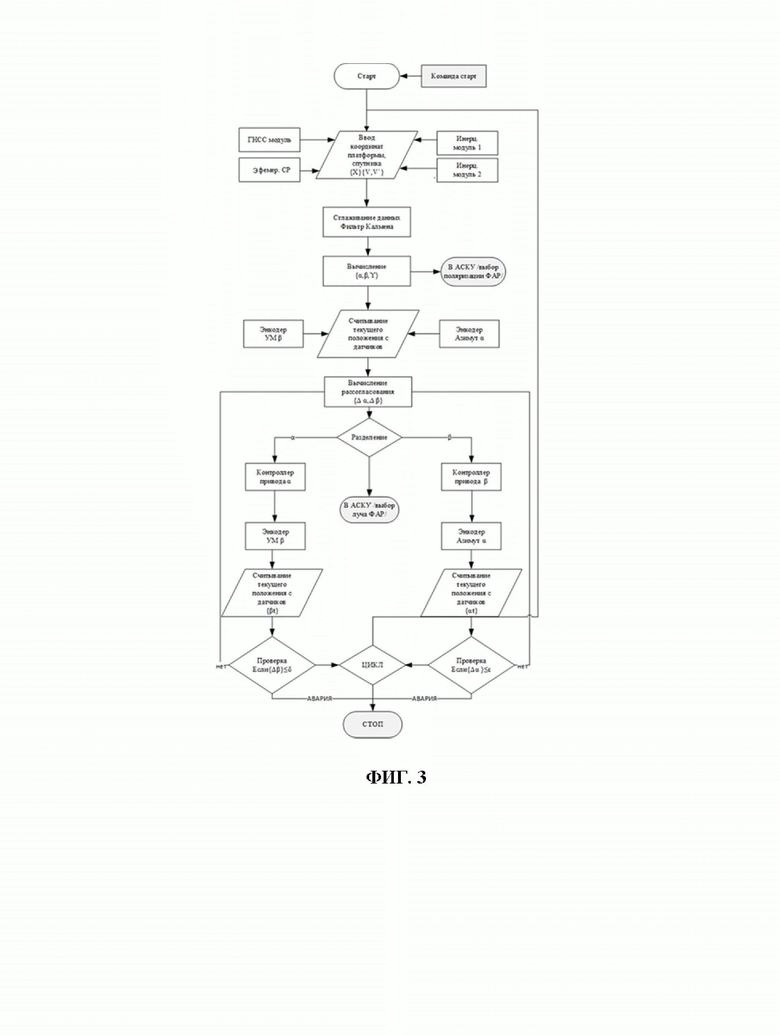
Фиг. 2 - блок схема системы слежения;
Фиг.3 - блок схема алгоритма электромеханического наведения по азимуту и углу места;
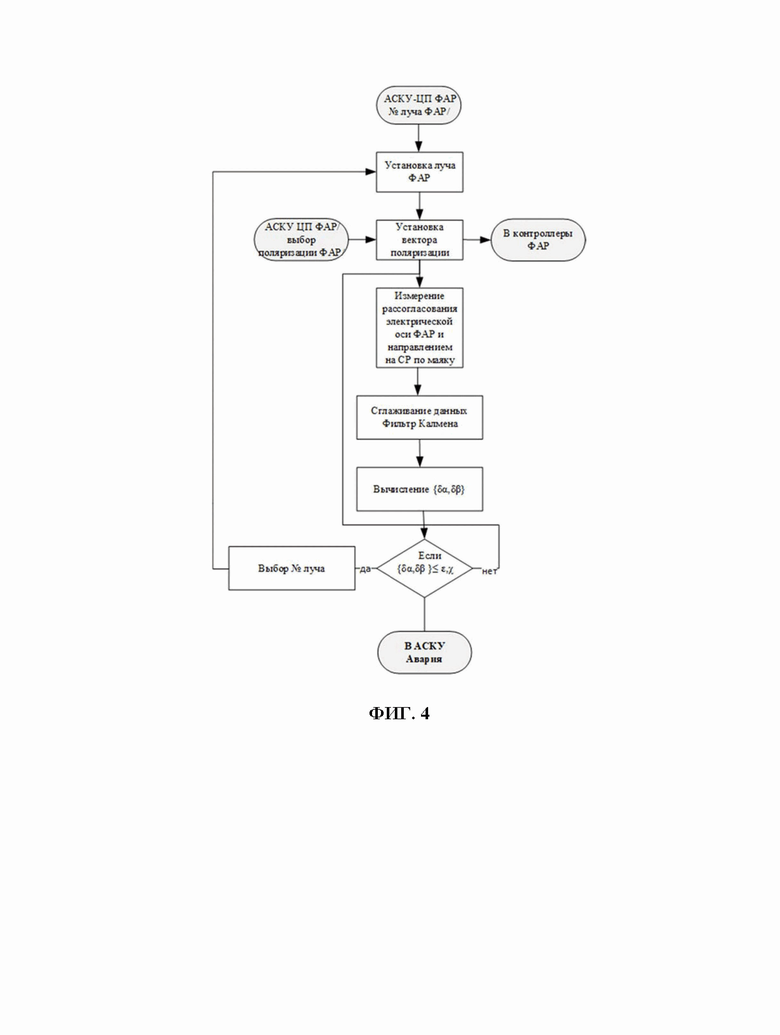
Фиг. 4 - блок схема алгоритма электронного наведения, пеленгации сигнала маяка и электронной стабилизации луча;
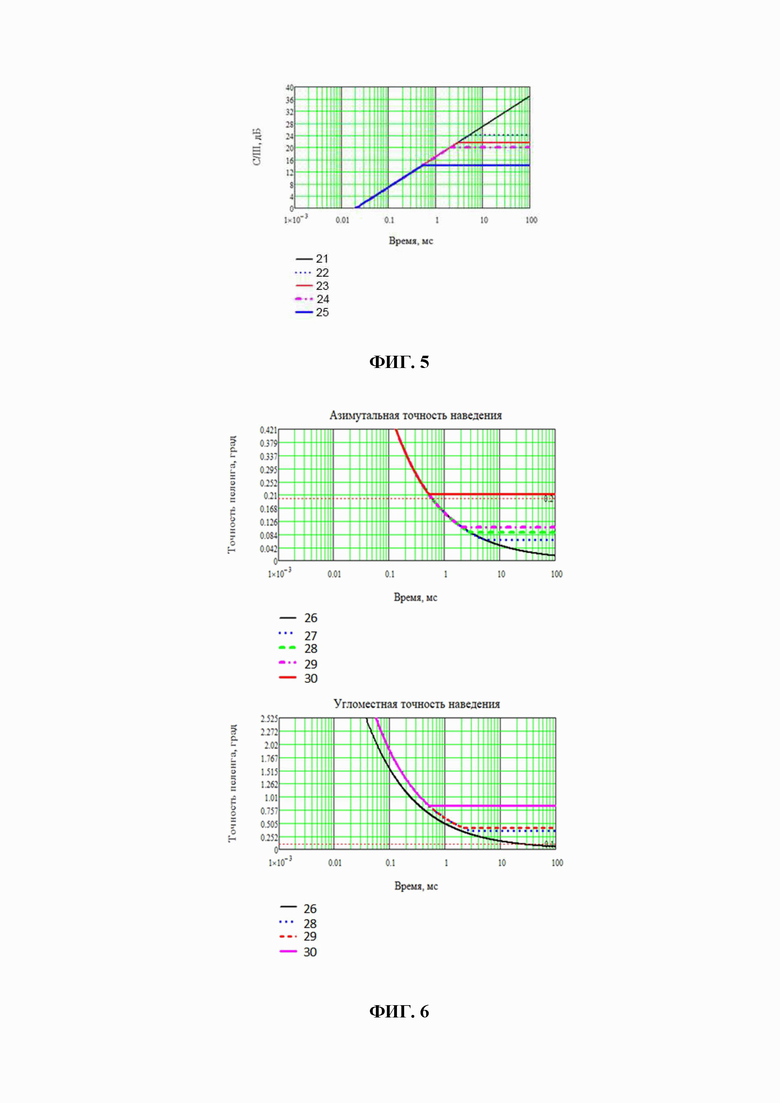
Фиг. 5 - результаты моделирования отношения сигнал/шум от времени измерения пеленга и скорости движения транспортного средства;
Фиг. 6 - азимутальная и угломестная точность наведения луча ФАР с помощью фазового пеленгатора (ФП) при разной скорости движения платформы на спутник в диапазоне углов места от времени измерения пеленга.
На фигурах 1 и 2, 5 и 6 цифрами обозначены следующие конструктивные элементы:
1, 3, 5, 7 - Приемная ФАР из четырех приемных субрешеток;
2, 4, 6, 8 - Передающая ФАР из четырех передающих субрешеток;
9 - Антенный элемент приемной и передающей ФАР;
10 - Микросхемы формирования ДН;
11, 11.1- синфазные равно амплитудные сумматоры и делители сигнала приемной и передающей ФАР соответственно;
12 - блок фазовых детекторов;
13, 14, 15 - Датчики пространственной ориентации и движения - акселерометр, инклинометр, приемник ГНСС;
16, 17 - Электромеханические приводы с драйверами азимутального вращения основания конструкции антенной системы и угломестного наклона планарных ФАР;
18 - Блок цифровой обработки, такой как центральный процессор;
19, 20 - Контроллеры управления ФАР с последовательной шиной;
Исходные данные для моделирования:
21 - Угол места 20 град, V-4=0,1 m/s;
22 - Угол места 20 град, V-40 m/s;
23 - Угол места 40 град, V-40 m/s;
24 - Угол места 40 град, V-55 m/s;
25 - Угол места 40 град, V-222 m/s;
26 - V=0,1m/s, Угол места 20 град;
27 - V=40 m/s, Угол места 20 град;
28 - V=40 m/s, Угол места 40 град;
29 - V=55 m/s, Угол места 40 град;
30 - V=222 m/s, Угол места 40 град.
Осуществление изобретения
Устройство слежения работает следующим образом. Приемная (1, 3, 5, 7) и передающая (2, 4, 6, 8) антенны представлены фазированными антенными решетками, состоящими из 12×12 групповых двухполяризационных парциальных антенных элементов (9) размером 2,85λ×0,7λ, для приемной ФАР и 3,5λ×0,83λ, передающей ФАР. Групповой элемент состоит из четырех двухполяризационных парциальных элементов (патчей), объединенных двумя делителями/сумматорами. Четыре парциальных элемента соединены с 8-ми канальной передающей и приемной микросхемой формирования диаграммы направленности (10). Каждый канал ФАР управляется от микросхемы по амплитуде и фазе. Микросхемы управляются от контроллеров управления (19, 20). Сигналы от двух поляризационных входов каждого антенного элемента перед объединением/делением изменяются по амплитуде и фазе, что позволяет обеспечить подстройку вектора поляризации, обеспечивая высокий уровень поляризационной развязки и создать необходимый сдвиг фаз относительно соседних элементов для осуществления сканирования. Дальнейшее объединение/деление сигнала от микросхем диаграммообразования в пределах приемной и передающей субрешеток ФАР уже осуществляется без дополнительного управления по амплитуде и фазе.
По данным датчиков ориентации антенны (13, 14, 15) и заданных поляризационных конфигурациях на спутнике связи формируются требуемые значения амплитуд и фаз в поляризационных каналах каждого антенного элемента, обеспечивающие согласование поляризаций на прием и передачу.
В приемной ФАР сигналы от субрешеток (1, 3, 5, 7) разветвляются, часть разветвленных сигналов поступают на сумматор (11), на выходе которого формируется суммарный луч ФАР для приемника информационного сигнала.
Другая часть разветвленного сигнала используется аппаратурой фазового пеленгатора, обеспечивающего фильтрацию сигнала маяка спутника от информационного сигнала, формирование пары сигналов, соответствующих вертикальной и горизонтальной базам (Вх, By). В блоке (12) фазовых детекторов со следящей системой фазовой подстройки частоты (ФАПЧ) осуществляется синхронное детектирование этих двух пар сигналов. Результатом детектирования является низкочастотное напряжение пропорциональное разности фаз между субрешетками, связанной с наклоном фронта падающей на антенну плоской волны. Квадратурные составляющие выходных сигналов в блоке (12) фазовых детекторов подвергаются аналого-цифровому преобразованию и передаче в блок цифровой обработки (18). В блоке цифровой обработки (18) по пеленгационным характеристикам для баз Вх, Ву извлекаются разности фаз, соответствующие угловому рассогласованию оси приемного луча и направления на спутник в антенной системе координат и корректируется угловое направление оси луча. Временная циклограмма работы системы электронной корректировки положения луча будет определяться линейной и угловой скоростью движения транспортного средства, сменой ориентации, временем когерентного накопления сигнала для обеспечения необходимого отношения сигнал/шум в каналах пеленгатора, который и будет, в основном, определять наравне с геометрией пеленгатора точность определения углового положения лучей антенны. С другой стороны, время когерентного накопления в пеленгаторе ограничено доплеровским расширением спектра сигнала. На фиг. 5 представлено результаты моделирования отношения сигнал/шум в каналах приемника ФП в зависимости от времени измерения для разных скоростей движения транспортного средства и угла возвышения направления на спутник. Из приведенных графиков следует, что отношение сигнал/шум улучшается до определенного порога определяемого доплеровским расширением спектра за счет тангенциальной компоненты вектора скорости. На фиг. 6 приведены результаты моделирования точности определения пеленга фазовым пеленгатором в ортогональных сечениях для Ku-диапазона спутниковой связи на ГСО в зависимости от длительности измерения пеленга для различных носителей АЗС в диапазоне скоростей от 0,1 м/с до 222 м/с при углах места от 20 до 40 град (21-32) для неподвижного (21, 26), для наземного автотранспорта (22, 23, 27, 28), для скоростного железнодорожного транспорта (24, 29, 31) и для самолета (30, 32). Электрический размер пеленгационных баз при моделирование принимался Вх=17λ, Ву=4,26λ, ЭИИМ сигнала маяка для спутника на ГСО был равен 12 дБ⋅Вт. Из приведенных материалов моделирования следует, что уровень точности пеленгации и наведения луча для всех видов транспортных средств достигает в горизонтальной (азимутальной) плоскости значений лучше, чем 0,3° и в вертикальной плоскости (угломестной) менее 1°.
| название | год | авторы | номер документа |
|---|---|---|---|
| АБОНЕНТСКАЯ ЗЕМНАЯ СТАНЦИЯ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2816866C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПО РАДИОЛУЧУ | 2003 |
|
RU2249229C2 |
| Спутниковая система связи | 1982 |
|
SU1072274A1 |
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
| СИСТЕМА И СПОСОБ ДЛЯ МОБИЛЬНОЙ СВЯЗИ ПОСРЕДСТВОМ ГЕОСТАЦИОНАРНЫХ СПУТНИКОВ | 2016 |
|
RU2706226C2 |
| Многофункциональная система радиозондирования атмосферы | 2016 |
|
RU2626410C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| ЛИНЗОВАЯ АНТЕННАЯ СИСТЕМА | 2018 |
|
RU2782177C2 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 2006 |
|
RU2321818C1 |
Изобретение относится к антенным системам подвижных средств спутниковой связи и может быть использовано для организации радиолиний при работе через спутники связи, находящихся на геостационарной и высокоэллиптической орбитах в движении. Техническим результатом является упрощение электромеханической части системы слежения антенны, повышение точности наведения и удержания луча на спутнике при минимальной инерционности, максимальном отношении сигнал/шум и максимальной защите от помех с соседними спутниками при обеспечении одновременной электронной подстройки вектора поляризации. Упомянутый технический результат достигается тем, что при слежении за спутником антенной системой земной станции подвижной спутниковой связи предварительное наведение луча антенны осуществляется электромеханическим способом по данным эфемерид спутника, текущему положению абонентской земной станции, исходя из информации приемника ГНСС (глобальной навигационной спутниковой системы), а также датчиков пространственной ориентации и движения; точное наведение и сопровождение в движении происходит за счет двухкоординатного электронного наведения приемного и передающего лучей ФАР (фазированной антенной решетки) с использованием цифровых данных двухканального с ортогональными базами фазового пеленгатора узкополосного радиосигнала маяка спутника; при этом передающий и приемный лучи антенны, по которому передается полезная информация, все время удерживается на спутнике с погрешностью не более 0,3° по азимуту и 1° по углу места в угловом секторе азимут×угол места=±3°×±40°, обеспечивая максимальную энергетику сеанса связи и защиту от помех с соседними спутниками. 2 н. и 2 з.п. ф-лы, 6 ил.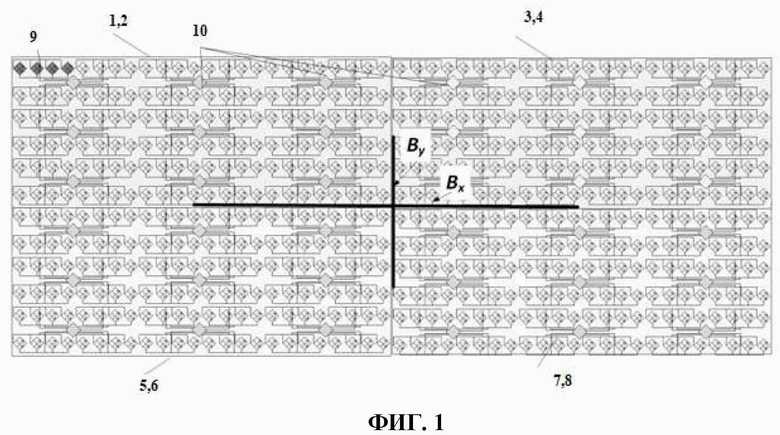
1. Система слежения за спутником антенной системой земной станции подвижной спутниковой связи, содержащая по крайней мере, одну пару приемной и передающей антенн, представляющих собой, соответственно, приемные и передающие фазированные антенные решетки в виде четырех субрешеток, образованных из групповых двухполяризационных антенных элементов, блок цифровой обработки, выполненный с возможностью передачи команд на электромеханические приводы для наведения приемного и передающего лучей антенн и микросхемы формирования диаграммы направленности для изменения по амплитуде и фазе сигнала каждого поляризационного канала групповых двухполяризационных антенных элементов для формирования вектора поляризации и наклона приемного и передающего лучей по результатам обработки цифровых данных от датчиков пространственной ориентации и движения и цифровых данных в блоке фазовых детекторов, при этом приемная и передающая фазированные антенные решетки оборудованы синфазными равно амплитудными сумматорами и делителями сигнала, а приемная фазированная антенная решетка выполнена с возможностью разделения сигнала маяка и передачи одной части сигнала на приемник информационного сигнала, а другой части сигнала на блок фазовых детекторов, выполненный с возможностью фильтрации сигнала маяка спутника от информационного сигнала и формирования пары сигналов, соответствующих вертикальной и горизонтальной базам, с последующим синхронным детектированием и аналого-цифровым преобразованием.
2. Способ слежения за спутником антенной системой земной станции подвижной спутниковой связи, включающий следующие стадии:
- предварительное наведение луча антенн, которое осуществляется электромеханическим способом по данным эфемерид спутника при помощи электромеханических приводов по сигналу от цифровой обработки;
- разделение сигнала маяка спутника в приемной фазированной антенной решетке, одна часть которого поступает на сумматор приемной фазированной антенной решетки, а другая часть в блок фазовых детекторов;
- формирование в блоке фазовых детекторов пары сигналов, соответствующих вертикальной и горизонтальной базам Вх, By и фильтрацию сигнала маяка спутника от информационного сигнала, поступающего с сумматора, последующим синхронным детектированием этих двух пар сигналов для получения низкочастотных напряжений, пропорциональных разности фаз между субрешетками, и получение на выходе блока фазовых детекторов выходных сигналов, квадратурные составляющие которых подвергаются аналого-цифровому преобразованию и передаче в блок цифровой обработки для извлечения разности фаз по пеленгационным характеристикам для баз Вх, By, соответствующих угловому рассогласованию оси приемного луча и направления на спутник в антенной системе;
- обработка с помощью блока цифровой обработки цифровых данных от датчиков пространственной ориентации и движения и цифровых данных, полученных в блоке фазовых детекторов;
- точное наведение луча антенн по команде от блока цифровой обработки с помощью электромеханических приводов на основе скорректированного углового направления оси луча антенн сигнала в блоке цифровой обработки;
- сопровождение спутника за счет двухкоординатного электронного наведения приемного и передающего лучей приемной и передающей фазированной антенной решетки по команде от блока цифровой обработки на контролеры управления фазированными антенными решетками для формирования в микросхемах формирования диаграммы направленности необходимых значений амплитуды и фазы в двухполяризационных антенных элементах приемных и передающих субрешеток, обеспечивающие формирование наклона лучей и вектора поляризации, согласованного с поляризационной комбинацией на спутнике, причем передающий и приемный лучи антенны по которым передается полезная информация, непрерывно удерживаются на спутнике с погрешностью не более 0,3° по азимуту и 1° по углу места в угловом секторе электронного сопровождения - азимут×угол места равен ±3°×±40°.
4. Способ по п. 3, отличающийся тем, что процесс предварительного электромеханического наведения, точное наведение и сопровождение спутника с высокой угловой точностью с использованием двухкоординатного электронного формирования приемного и передающего лучей фазированной антенной решетки осуществляются одновременно и независимо друг от друга.
| US 9952307 B2, 24.04.2018 | |||
| US 9608716 B1, 28.03.2017 | |||
| Способ стабилизации лучей спутниковой многолучевой гибридной зеркальной антенны по сигналам от смещенных наземных маяков | 2019 |
|
RU2727860C1 |
| US 9853356 B2, 26.12.2017 | |||
| КR 102003935 B1, 26.07.2019 | |||
| CN 111030748 B, 22.10.2021 | |||
| Сортировка для мусора | 1938 |
|
SU57517A1 |
| АНТЕННАЯ СИСТЕМА ДВУХКООРДИНАТНОГО ПЕЛЕНГАТОРА | 2008 |
|
RU2349006C1 |
| АНТЕННА | 2002 |
|
RU2225663C1 |
| Y | |||
| Cheng et al | |||
| Satellite ground stations with electronic beam steering, 2012 IEEE First AESS European | |||

