Изобретение относится к области подводной акустики, в частности, к методам пассивного акустического мониторинга подводной среды. Изобретение может быть использовано при проведении морских биологических исследований и промышленного промысла для поиска и оценки скоплений биологических объектов.
Известен способ обработки импульсных сигналов [1], основанный на итеративной оптимизации функции весового суммирования импульсных сигналов сейсмического источника на основе измерения параметров корреляционной взаимосвязи сигналов, принимаемых отдельными каналами пространственно распределенной антенной системы. Данный способ имеет ограниченное применение для негауссовых сигналов гидробионтов ввиду использования корреляционной взаимосвязи.
Известны способ и устройство для автоматического обнаружения морских животных по патенту № ЕР 2546680 А1 [2], математическую основу которых составляет оценка четвертого момента распределений принимаемой сигнальной выборки в пространстве сигнала и его спектрального образа. Данное техническое решение заключается в следующей последовательности действий над принимаемой с помощью антенной системы совокупностью акустических сигналов: спектральное преобразование принятой пространственно-временной выборки с помощью метода Фурье, вычисление энергии сигналов как во временной, так и спектральной области, оценки уровня шума как во временной, так и спектральной области, измерении отношения сигнал/шум, формировании пороговых соотношений и принятия решения о наличии сигнала эмиссии морского животного. Недостатком данного способа является низкая помехоустойчивость, обусловленная медленной сходимостью оценки четвертого момента вероятностного распределения входного сигнала при ограниченной выборке [3] (п. 3.2.2.16, стр. 268-271).
Известна буксируемая пассивная гидролокационная система для обнаружения и пеленгования гидробионтов [4], содержащая основную и вспомогательную антенные решетки, два лучеформирователя, один из которых адаптивный, подключенных к выходам элементов соответствующих антенных решеток, блок компенсации, входы которого соединены с выходами лучеформирователей, а выходы подключены к многоканальному корреляционному приемнику, соединенному с вычислителем пороговых статистик и пеленгатором, выходы которых подключены к блоку управления, отображения и принятия решения. Система позволяет обнаруживать и лоцировать скопления гидробионтов в условиях внешних шумов от судна-буксировщика, благодаря подавлению мешающих сигналов техногенного характера в измерительных каналах приемной антенной решетки путем адаптивной компенсации без участия оператора.
Данный способ имеет ограниченное применение для негауссовых сигналов гидробионтов ввиду использования корреляционной взаимосвязи, имеет малую помехоустойчивость.
Наиболее близким по технической сущности к заявляемому способу является способ обнаружения биоакустических импульсных сигналов на основе измерения статистик высших порядков, предложенный в статье [5].
Данный способ обнаружения физически основан на существенном отличии статистических свойств биоакустических сигналов морских гидробионтов от статистических свойств шумов моря и состоит в измерении коэффициента эксцесса сигнала, принятого одноканальной акустической антенной. Этот способ основан на приеме акустического сигнала эмиссии гидробионтов одноканальным приемным устройством. Устройство, реализующее данный способ, содержит устройство для приема сигнала, набор из N полосовых фильтров, набор из N устройств измерения коэффициента эксцесса путем измерения второго и четвертого центральных моментов статистических распределений сигналов на выходах каждого из фильтров, N пороговых устройств сравнения и решающего устройства.
Недостатком данного способа является: 1) малая помехоустойчивость ввиду медленной сходимости оценки коэффициента эксцесса при ограниченной выборке сигнала и 2) отсутствие возможности определения направления на источник биоакустических шумов.
Технической задачей изобретения является повышение эффективности обнаружения и пеленгации сигналов гидробионтов.
Техническим результатом, достигаемым при использовании изобретения, является повышение эффективности обнаружения и пеленгации сигналов гидробионтов, определение угловых координат скоплений биологических объектов в условиях естественных и техногенных шумов моря для негауссовых сигналов гидробионтов на основе измерения и сравнения характеристической функции статистических распределений принятых акустических сигналов при повышении помехоустойчивости и быстродействия.
Технический результат предложенного способа основан на измерении статистической взаимосвязи высших порядков между сигналами, принимаемыми многоканальной гидроакустической антенной решеткой, и заключается:
1) в многократном, по числу предполагаемых направлений прихода сигнала, взвешенном суммировании принятых сигналов, поэлементно задержанных на время, определенное геометрией расположения элементов антенной решетки,
2) в проведении измерения параметров статистической связи на основе выборочной характеристической функции распределений случайных процессов на выходах антенной решетки,
3) в вынесении решения о наличии сигнала посредством сравнения значений измеренных характеристических функций.
Заявленная группа изобретений поясняется следующими чертежами.
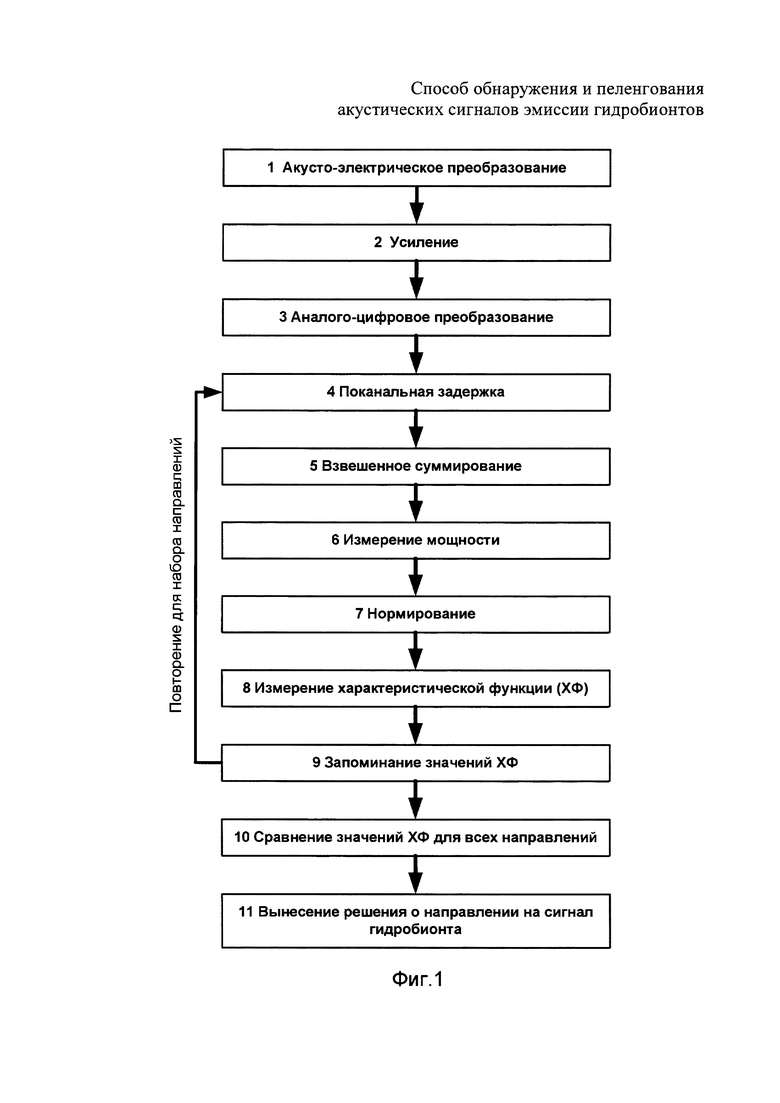
На Фиг. 1 показана функциональная схема, поясняющая последовательность действий над акустическим сигналом эмиссии гидробионтов, принимаемым антенной решеткой.
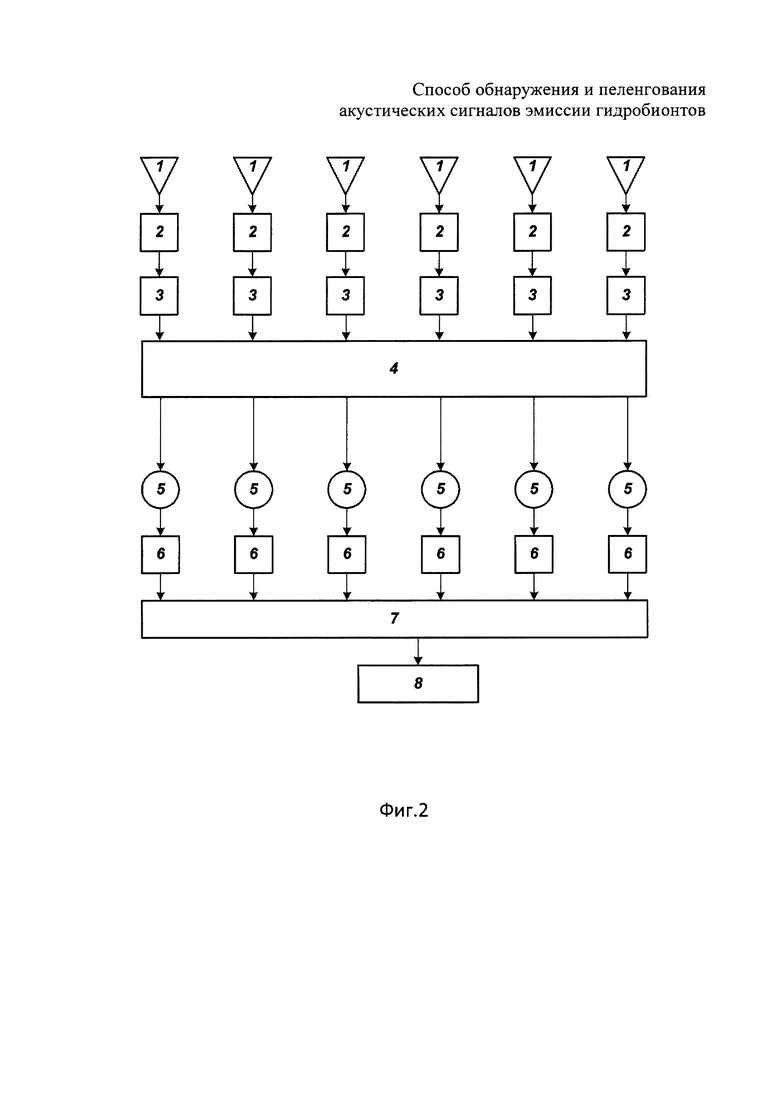
На Фиг. 2 показана схема устройства для осуществления способа обнаружения и пеленгования акустических сигналов эмиссии гидробионтов.
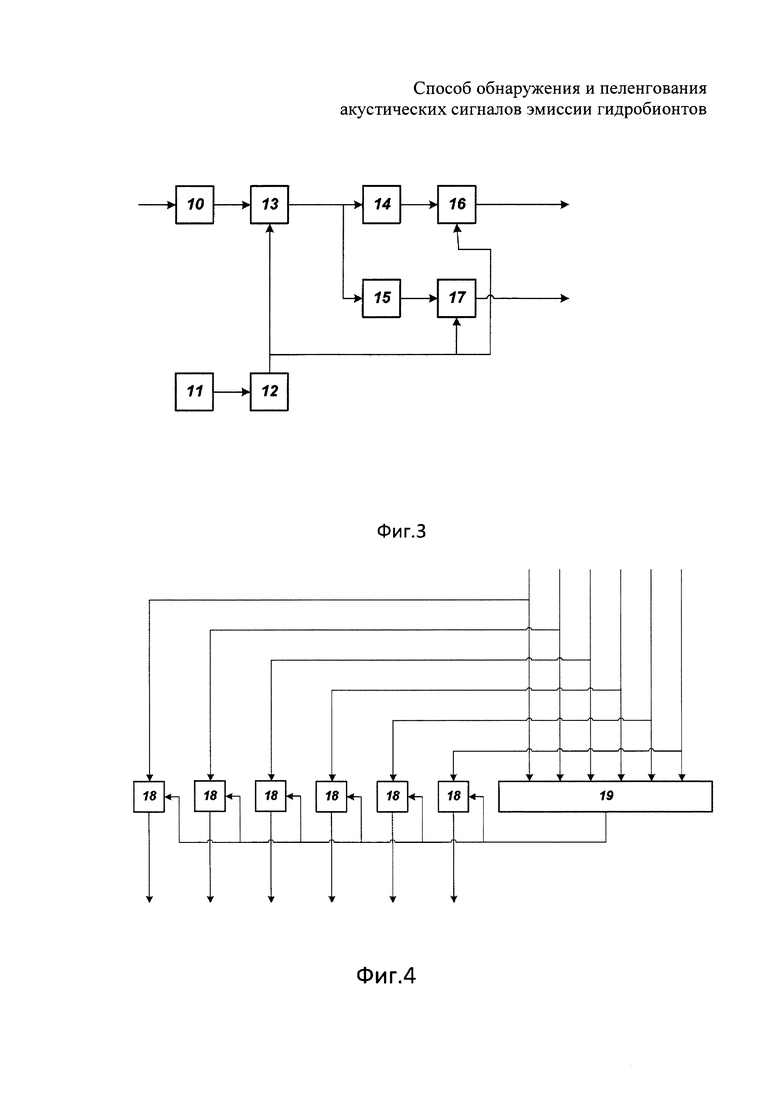
На Фиг. 3 показана функциональная схема блока измерения характеристической функции.
На Фиг. 4 показана схема устройства сравнения характеристических функций.
Способ обнаружения и пеленгования акустических сигналов эмиссии гидробионтов поясняется следующей функциональной схемой (фиг. 1), показывающей последовательность действий над акустическим сигналом эмиссии гидробионтов, принимаемым антенной решеткой.
Акустический сигнал, излучаемый гидробионтом (скоплением гидробионтов), преобразуется в электрический сигнал путем акустоэлектрического преобразования (действие 1), осуществляемого, например, с помощью пространственно разнесенного набора пьезоэлектрических преобразователей с последующим усилением (действие 2) и аналого-цифровым преобразованием (действие 3) для получения дискретной пространственно-временной выборки сигналов:
{sn(tk)}, n=1, …N, tk=kΔt, k=0, …, K-1,
где N - количество акустоэлектрических преобразователей, K - количество временных отсчетов в выборке, sn=sn(tk), k=0, …, K-1 есть вектор сигнала размерности [K⋅1], состоящий из кодов значений сигнала от n-го акустоэлектрического преобразователя в моменты времени tk=kΔt, Δt - интервал дискретизации по времени.
В соответствии с геометрическими положениями акустоэлектрических преобразователей осуществляется групповая задержка (действие 4) (увеличение/уменьшение группового времени запаздывания) полученных электрических сигналов для компенсации запаздывания акустического сигнала гидробионта, приходящего с выбранного предполагаемого направления нахождения источника сигнала. Данное действие может быть осуществлено, например, с использованием техники прямого и обратного дискретного преобразования Фурье над полученной в результате действия 3 дискретной пространственно-временной выборкой сигналов. Для вектора сигнала sk в точке пространства с координатами (хn, yn) после преобразования его в электрический сигнал и аналого-цифрового преобразования вектор Фурье-образа есть
где  есть квадратная матрица дискретного преобразования Фурье.
есть квадратная матрица дискретного преобразования Фурье.
Тогда вектор сигнала, задержанного на время  , соответствующее угловому положению ϕ, есть
, соответствующее угловому положению ϕ, есть

где F+ - матрица дискретного обратного преобразования Фурье, знак + означает эрмитово сопряжение, Е(τ) - матрица фазового сдвига спектральных компонент на время τ:

Таким образом, результатом действия 4 для всех элементов антенной решетки является пространственно-временная выборка сигналов с задержками, соответствующими задержкам сигнала гидробионта, находящегося на выбранном направлении, в соответствии с геометрией расположения элементов.
После компенсации задержек сигнала (действие 4) производится взвешенное суммирование (действие 5) полученных сигналов с помощью набора весовых коэффициентов, предварительно заданных вектором
W={wn}, n=1, …, N,
Результатом действия 5 над принятой пространственно-временной выборкой сигнала {sn} является сигнал с выбранного направления ϕ

где знак 'означает операцию транспонирования, a {sn(ϕ)} - пространственно-временная выборка задержанных сигналов на выходах элементов, образованная из выборок сигналов на выходах элементов антенной решетки, каждый из которых задержан по времени в соответствии с пространственным положением элемента, ⋅ означает скалярное произведение векторов.
Далее производится действие 6, заключающееся в измерении мощности полученного в результате действия 5 сигнала, результатом которого является значение второго центрального момента распределения сигнала y(ϕ)(t), а именно

Действие 7 заключается в нормировании сигнала на величину среднеквадратичного значения выборок сигнала y(ϕ)(kΔt):
Результатом действия 7 является выборка сигнала x(ϕ)(kΔt), k=0, …, K-1 с величиной мощности, равной 1.
Действие 8 состоит в вычислении значений характеристической функции распределения вероятности для некоторого наперед заданного набора из U значений аргумента, а именно:

Полученный набор из U измеренных значений характеристической функции запоминается (действие 8) и последовательность действий 4-9 повторяется для всех интересующих направлений ϕ=ϕ1, ϕ2, ϕ3 …ϕk.
Действием 9 производится сравнение запомненных наборов значений характеристической функции для каждого из направлений, по результатам которого выносится решение о направлении на источник сигнала.
Действие сравнения может быть выполнено на основе следующих положений. Пусть

есть совокупность наборов измеренных значений характеристической функции для всех интересующих направлений. Тогда операция сравнения может быть выполнена, например, с помощью следующих операций:
а) вычисляется набор значений разброса характеристической функции

где ϕl есть некоторое выбранное направление, для которого определяется наличие или отсутствие сигнала гидробионта, а ϕk, k=1, …N; k≠l - все прочие направления, * означает операцию комплексного сопряжения;
б) вычисляется абсолютное значение разброса
Решение о наличии сигнала гидробионтов и его угловом положении делают по превышению абсолютного значения разброса β некоторого наперед заданного порогового значения βth.
Сущность объекта изобретения-устройства, предназначенного для реализации вышеописанного способа, выражается в следующей совокупности существенных признаков, достаточной для достижения указанного выше обеспечиваемого изобретением технического результата. Устройство для осуществления вышеописанного способа обнаружения и пеленгования акустических сигналов эмиссии гидробионтов (Фиг. 2), содержащее последовательно соединенные антенные решетки 1, состоящие из некоторого количества приемных акустоэлектрических преобразователей, усилители 2, аналого-цифровые преобразователи 3, лучеформирующее устройство 4, усилители с автоматической регулировкой усиления 5, устройства измерения характеристической функции случайного процесса 6, соответствующие числу усилителей с автоматической регулировкой усиления 5, причем к каждому из выходов лучеформирователя 4 подключены соответствующие входы усилителей с автоматической регулировкой усиления 5, выходы которых соединены с каждым устройством измерения характеристической функции случайного процесса 6, выходы которых соединены с входами устройства сравнения характеристических функций 7, выходы которых соединены с индикатором 8.
Электроакустические преобразователи антенных решеток 1 могут быть выполнены, например, в виде пьезокерамических ультразвуковых датчиков. Усилители 2 и аналого-цифровые преобразователи 3 могут быть выполнены с использованием стандартных операционных усилителей и АЦП, например, поразрядного уравновешивания.
Лучеформирователь 4 может, например, быть построен на основе известного принципа многоканального согласованного пространственного фильтра. Для каждого из выбранных направлений формируется набор задержек для компенсации задержек фронта плоской волны по элементам антенной решетки. Для каждого из направлений производится амплитудное взвешивание входной выборки в соответствии со значением диаграммы направленности элемента антенной решетки в заданном направлении. Задержка сигнала в каждом из каналов осуществляется или с помощью, например, трансверсального фильтра с необходимой дискретностью задержки или производится путем выполнения дискретного преобразования Фурье над принятыми совокупностями выборок в каждом из каналов и почленным домножением полученного Фурье-образа на вектор комплексной экспоненты с нарастающим фазовым множителем, определенным заданной величиной задержки. Полученные таким образом сигналы суммируются для формирования канала с диаграммой направленности, имеющий максимум в соответствующем направлении.
Усилитель с автоматической регулировкой усиления может быть реализован, например, с помощью усилителя с регулируемым коэффициентом усиления, амплитудного детектора с интегратором.
Функциональная схема возможной реализации блока измерения характеристической функции 6 представлена на Фиг. 3. Блок измерения характеристической функции состоит из входного регистра 10 для выборок приема обрабатываемого случайного процесса, выход регистра 10 соединен с одним из входов перемножителя 13, другой вход которого соединен с выходом накопительного счетчика 12, с которого поступает линейно нарастающий сигнал на вход перемножителя 13, управляемого тактовым генератором 11. Выход перемножителя 13 подключен к адресным входам постоянных запоминающих устройств 14 и 15, в которых занесены коды функций косинуса и синуса соответственно, выходы которых соединены с соответствующими входами цифровых интеграторов 16 и 17. Выходные сигналы последних являются оценками косинусной и синусной части характеристической функции случайного процесса на входе регистра 10.
Устройство сравнения характеристических функций может быть реализовано в соответствии с Фиг. 4. Устройство содержит многоканальный сумматор 19 и набор сумматоров-перемножителей 18. Многоканальный сумматор 19 производит суммирование значений характеристических функций сигналов на его входах в соответствии с формулой
Сумматоры-перемножители 18 производят вычисление разности значения характеристической функции на выходе сумматора 19 и одной их входных характеристических функций и перемножение на эту входную функцию в соответствии с формулой

Значения функции сравнения μ(u) подаются на индикатор 8, где для каждого из угловых положений отображаются набор ее значений. Отличия в отображаемой на экране индикатора сигналограмме позволяют судить о направлении на положение гидробионтов.
Таким образом, изобретение повышает эффективность обнаружения и пеленгования сигналов гидробионтов, определение угловых координат скоплений биологических объектов в условиях естественных и техногенных шумов моря для негауссовых сигналов гидробионтов на основе измерения и сравнения характеристической функции статистических распределений принятых акустических сигналов при повышении помехоустойчивости и быстродействия.
Литература
1. R. Wiggins, "Entropy guided deconvolution of seismic signal," lnt.C1.5: G01V 1/36 №4688198.
2. C. Gervaise, "Method and device for automatically detecting marine animals," Int.cl. G01V 1/00, №2256610, 2014.
3. А.И. Кобзарь. Прикладная математическая статистика. Для инженеров и научных работников. - М: ФИЗМАТЛИТ, 2006. - 816 с.
4. Рогожников А.В. (RU), Новиков С.Е. (RU), Добровольский А.В. (RU), "Буксируемая пассивная гидролокационная система для обнаружения и пеленгования гидробионтов", G01S 15/96 (2006.01), Патент RU 138624, опубликован 20.03.2014.
5. Sylvain Busson, Cedric Gervaise, Amelie Barazzutti, Basile Kinda, Virgine Jaud, Laurent Chauvaud, Anthony Robson High-order statistics for bioacoustics click detection // 10eme Congres Francais d'Acoustique. - Lion, 12-16 Avril 2010.
6. Немкин Ю.О. (RU) Вешкурцев Ю.М. (RU), "Анализатор характеристической функции сигнала," МПК7 G01R 25/00, Патент RU 2231798, июнь 27, 2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645016C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ УГЛОВЫХ КООРДИНАТ РАДИОСИГНАЛА В АМПЛИТУДНЫХ МОНОИМПУЛЬСНЫХ ПЕЛЕНГАЦИОННЫХ СИСТЕМАХ | 2016 |
|
RU2625349C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263327C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ В ВОДНОЙ СРЕДЕ | 2015 |
|
RU2585401C1 |
| ШУМОПЕЛЕНГАТОРНАЯ СТАНЦИЯ | 1988 |
|
SU1840459A1 |
| Способ обнаружения и оценивания характеристик широкополосных сигналов и устройство для его реализации | 2023 |
|
RU2814220C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ ОБЪЕКТОВ ПО ИЗЛУЧЕНИЯМ ИХ ПЕРЕДАТЧИКОВ | 2005 |
|
RU2309423C2 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2434239C1 |
| Способ повышения точности и достоверности пеленгования при накоплении спектральных компонент сигналов источников радиоизлучения | 2019 |
|
RU2696094C1 |
| Способ пеленгации широкополосных сигналов с повышенной разрешающей способностью | 2019 |
|
RU2752878C2 |
Изобретение относится к области подводной акустики, в частности к методам пассивного акустического мониторинга подводной среды и может быть использовано при проведении морских биологических исследований и промышленного промысла для поиска и оценки скоплений биологических объектов. Техническим результатом, достигаемым при использовании изобретения, является повышение эффективности обнаружения и пеленгации сигналов гидробионтов, определение угловых координат скоплений биологических объектов в условиях естественных и техногенных шумов моря для негауссовых сигналов гидробионтов на основе измерения и сравнения характеристической функции статистических распределений принятых акустических сигналов при повышении помехоустойчивости и быстродействия. Способ обнаружения и пеленгования акустических сигналов эмиссии гидробионтов заключается в приеме, усилении и фильтрации сигналов акустической эмиссии посредством набора акустоэлектрических преобразователей с различными характеристиками направленности, нормировке принятых сигналов на величину мощности каждого из принятых сигналов, измерении характеристических функций статистических распределений нормированных сигналов на выходах каждой из антенн, сравнении измеренных характеристических функций распределения для определения наличия биологического объекта и направления на него. Использование в качестве измеряемого параметра сигналов на выходах антенн их характеристических функций с последующим их сравнением коренным образом отличает данный способ от традиционной обработки сигнала антенной решетки, основанной на измерении энергии принятого сигнала. Дана схема устройства для осуществления способа. 2 н.п. ф-лы, 4 ил.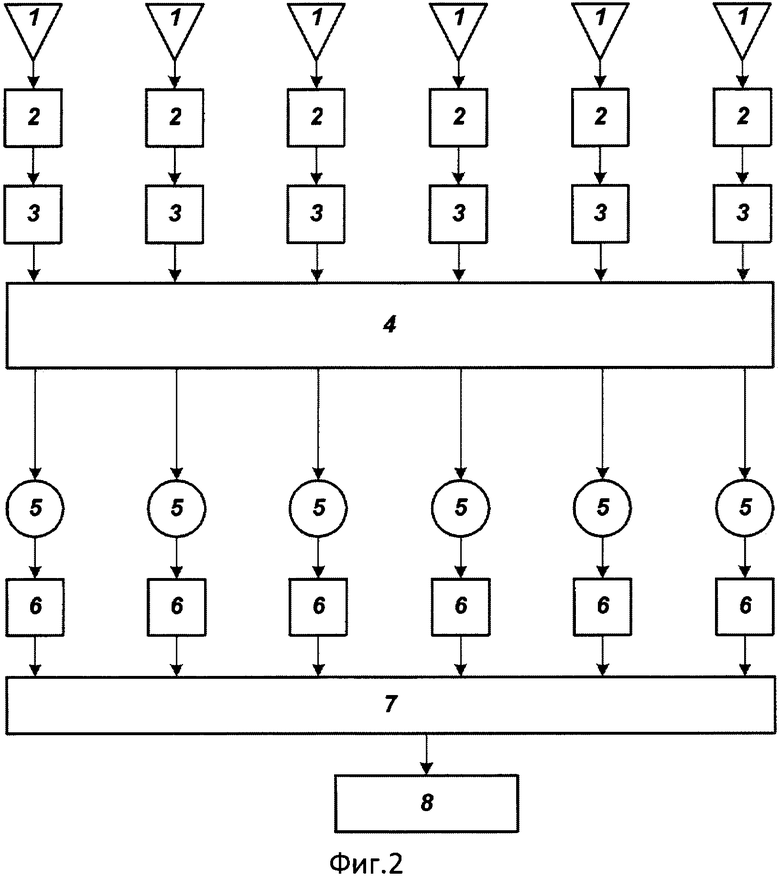
1. Способ обнаружения и пеленгования акустических сигналов эмиссии гидробионтов, состоящий в последовательных приеме акустического сигнала, его преобразовании в электрический сигнал, его усилении, дискретизации, компенсации временного запаздывания для некоторого наперед выбранного направления, суммировании компенсированных по задержке сигналов, и измерении мощности полученного суммарного сигнала, повторении перечисленных действий для некоторого наперед заданного набора направлений, отличающийся тем, что дополнительно производят нормировку суммированного сигнала на значение его среднеквадратического отклонения, измерение значений характеристической функции распределения сигнала для некоторого набора значений ее параметра, сравнение полученных характеристических функций для различных угловых направлений компенсации и вынесение решения о наличии сигнала гидробионта и пеленга по результатам сравнения.
2. Устройство для осуществления способа обнаружения и пеленгования акустических сигналов эмиссии гидробионтов, содержащее последовательно соединенные антенные решетки, усилители, аналого-цифровые преобразователи, лучеформирующее устройство, отличающееся тем, что в него введены усилители с автоматической регулировкой усиления, устройства измерения характеристической функции случайного процесса, соответствующие числу усилителей с автоматической регулировкой усиления, причем каждый из выходов лучеформирующего устройства подключен к соответствующим входам усилителей с автоматической регулировкой усиления, выходы которых соединены с входом каждого устройства измерения характеристической функции случайного процесса, выходы которого соединены с устройством сравнения характеристических функций, соединенным с индикатором.
| СПОСОБ ПЕЛЕНГАЦИИ ГИДРОБИОНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2093856C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ СО СЛОЖНЫМ ЗАКОНОМ МОДУЛЯЦИИ | 2001 |
|
RU2293356C2 |
| Устройство для дистанционного управления приводом стрелки | 1960 |
|
SU143839A1 |
| СПОСОБ ПЕЛЕНГАЦИИ ГИДРОБИОНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2064683C1 |
| US4290125 A1, 15.09.1981 | |||
| US6510107 B2, 21.01.2003. | |||

