Изобретение относится к области гидроакустики и предназначено для использования в гидроакустических станциях с гибкой протяженной буксируемой антенной (ГПБА).
Известны гидроакустические станции с ГПБА (журнал "Судостроение за рубежом", №10, 1984 г. Гидроакустические системы с ГПБА, авторы А.А.Гурвич, Н.М.Гусев, Г.В.Яковлев, стр.34), включающие в себя гибкую протяженную буксируемую антенну, систему уплотнения и передачи сигналов, систему разуплотнения и первичной обработки сигналов, систему индикации и регистрации данных.
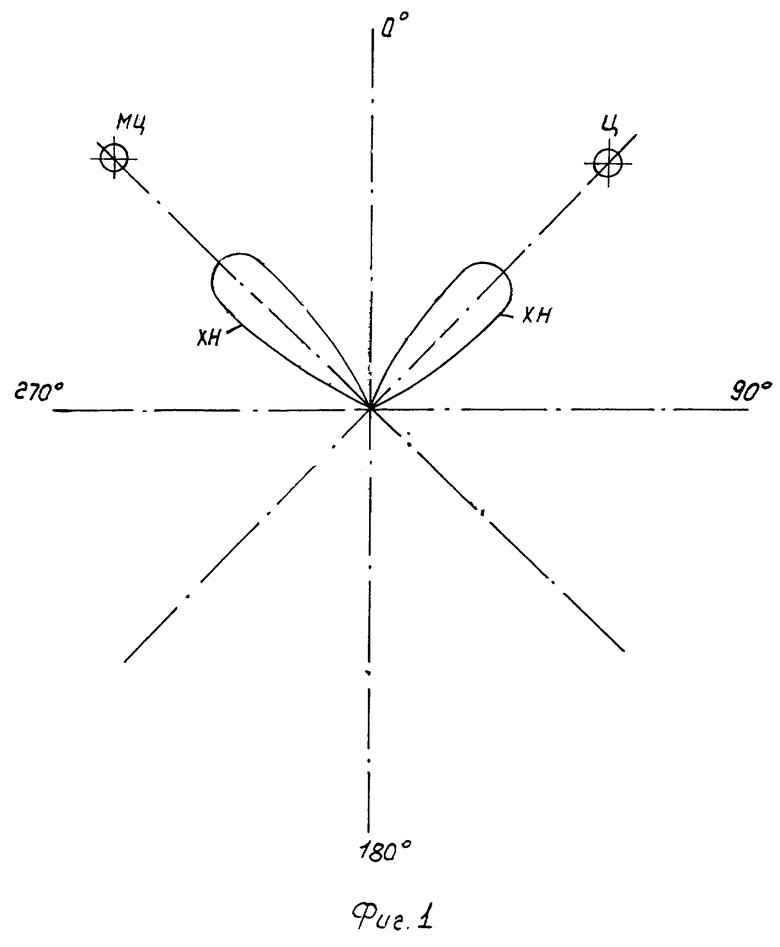
Для решения задачи обнаружения целей в кормовых углах обзора используется полная активная длина ГПБА, обеспечивающая обнаружение и пеленгование в узком кормовом секторе. Для формирования характеристики направленности применяется устройство компенсации фазового сдвига, представляющее собой линию задержки и суммирования сигналов от предварительных усилителей с целью формирования продольной характеристики направленности в узком кормовом секторе. При этом возникает неоднозначность определения пеленга (фиг.1) в горизонтальной плоскости, что является существенным недостатком таких систем. Эта неоднозначность устраняется путем специального маневрирования корабля-носителя ГПБА, что требует весьма большого времени для восстановления рабочего положения антенны после маневра корабля-носителя, определения пеленга на шумящую цель и построения графика курса (около 10-15 мин).
Указанное изобретение решает задачу расширения рабочего диапазона частот и повышения коэффициента концентрации, но проблема неоднозначности пеленгования целей остается. Приемные элементы двух гирлянд антенных решеток, заключенные в одну оболочку, расположены близко друг к другу (рядом) и при этом формируется одна широкая характеристика направленности в продольном кормовом направлении с такой же неоднозначностью пеленгования, как и в случае использования одной антенной решетки.
Другим аналогом к заявленному предмету изобретения является гидроакустическая станция с ГПБА, в которой используется приемная антенна в качестве горизонтально ориентированной системы, буксируемой кораблем или подводной лодкой, содержащая приемники давления и приемники градиента давления, расположенные по длине антенны определенным образом, которая предложена фирмой "Сандерс" - "Комбинация всенаправленной и двунаправленной антенны; однонаправленный прием в широком диапазоне углов в пространстве", патент США №4173148, 1978 г. Указанная система обеспечивает формирование характеристик направленности пространственных каналов антенны в виде кардиоиды и тем самым устраняется неоднозначность пеленгования акустических сигналов шумящих объектов.
Недостатком таких систем является то, что неоднозначность пеленгования удается устранить только в траверзном и близких к траверзному направлениях. Что касается кормового сектора, то неоднозначность пеленгования не устраняется, так как по своей форме кардиоида не обеспечивает пространственного разрешения в кормовых углах.
Известен также патент США №4162474 (НКТ-3406R) "Корабельная гидроакустическая система для сопровождения цели с устройством компенсации ошибок при качке и рыскании корабля", в котором в г/а системе используются две фазированные антенные решетки из гидрофонов, размещенные на фиксированном расстоянии ниже ватерлинии корпуса корабля. Формируется два перекрывающихся друг друга лепестка диаграммы направленности. Сигналы, принимаемые парой антенных решеток, квантуются и селектируются перед измерением взаимной корреляции для определения пеленга цели. При этом в сигнал, принятый одной из антенных решеток, вводится соответствующая временная задержка, с целью получения на входе корреляционного устройства сигналов совпадающих по времени. Указанное изобретение предполагает: во-первых, использование двух антенн, расположенных вдоль корпуса корабля с обоих бортов и не предусматривает использование ГПБА. Во-вторых, при пеленговании узкополосных дискретных составляющих шумоизлучения цели, корреляционная функция получается достаточно широкой и точность определения пеленга оказывается низкой. Кроме того, выделение корреляционной функции по узкополосным ДС дает многозначность пеленгования.
Таким образом, вышеупомянутые аналоги предлагаемого изобретения не способны решить задачу однозначного определения направления на цель в кормовом секторе обзора. Для его определения приходится прибегать к процессу длительного маневрирования ПЛ, что тактически и экономически не оправдано.
Наиболее близким по своей технической сущности к предлагаемому предмету изобретения является тракт шумопеленгаторной станции с гибкой протяженной буксируемой антенной по журналу США JASA v.72, №3, 3, Sept. 1982 г., 983-992 с, а также описанный в статье Гидроакустические системы с ГПБА авт. Гурвич А.А. и др. журнал "Судостроение за рубежом", №10, 1984, стр.34. В этом тракте заложены основные принципы обработки сигналов, принятых ГПБА.
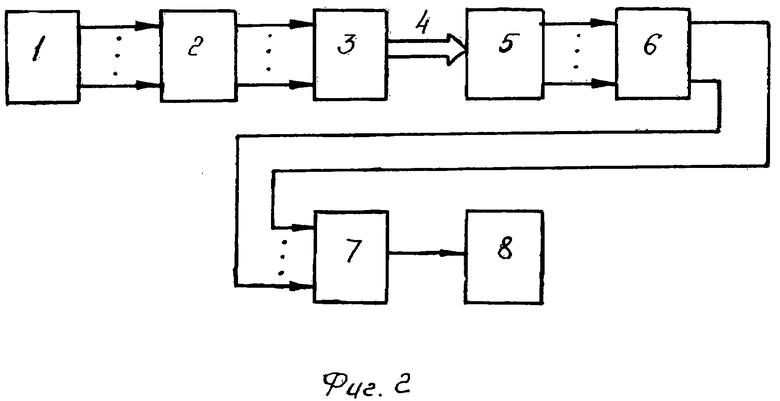
Он выбран нами в качестве прототипа (фиг.2), содержащий наибольшее количество общих признаков с предлагаемым устройством.
Тракт содержит последовательно соединенные ГПБА, сигналы с которой транслируются на корабль по кабель-буксиру, устройство предварительной обработки сигналов, устройство аналого-цифрового преобразования (АЦП) и уплотнения информации, устройство разуплотнения и запоминания информации, спектроанализатор и формирователь характеристики направленности (ФХ), реализованных на спецпроцессорах БПФ, обеспечивающих методом двумерного БПФ узкополосный спектральный анализ и одновременно параллельное формирование веера ХН, перекрывающих сектор курсовых углов от 0 до 180°, устройство временной и пространственной обработки, реализованное на мини-ЭВМ, устройство индикации и регистрации результатов.
Описанный тракт предназначен для обнаружения и пеленгования целей, но не решает задачу устранения неоднозначности пеленгования целей. Определение пеленга осуществляется также как и в упомянутых аналогах с помощью длительного маневрирования ПЛ.
Целью настоящего изобретения является устранение неоднозначности пеленгования объектов в кормовом секторе обзора.
Поставленная цель достигается тем, что в известный тракт гидроакустической шумопеленгаторной станции, состоящей из последовательно соединенных ГПБА, устройства цифро-аналогового преобразования и уплотнения информации, кабель-троса, устройства разуплотнения и запоминания информации, спектроанализатора и формирователя характеристик направленности, устройства временной и пространственной обработки, системы индикации и регистрации сигналов введены новые блоки, а именно, последовательно-соединенные вторая гибкая протяженная буксируемая антенна, второе устройство предварительной обработки сигналов, второе устройство аналого-цифрового преобразования и уплотнения информации, второй кабель-трос, второе устройство разуплотнения и запоминания информации, второй спектроанализатор и m-канальный формирователь характеристик направленности, две линии задержки с n-отводами, где n<m и два n-канальных умножителя соответственно (по половине) 2×n коммутируемых пространственных направлений прихода звуковой волны в кормовом секторе, причем входы первой и второй линии задержки, последовательно соединенных с входами первого и второго умножителей, соединены с выходами первого и второго формирователей характеристик направленности, формирующих характеристику направленности в кормовых углах соответственно, при этом расстояние между антеннами в горизонтальной плоскости определяется соотношением  где d - расстояние между антеннами, L - длина антенны, λ - длина волны, а указанная характеристика скомпенсирована на угол ϕ=90° относительно траверзного направления.
где d - расстояние между антеннами, L - длина антенны, λ - длина волны, а указанная характеристика скомпенсирована на угол ϕ=90° относительно траверзного направления.
Авторам неизвестны технические решения, содержащие признаки, отличающие данное решение от прототипа. Известная ГПБА, выполненная в виде двух гирлянд, не обеспечивает и не может обеспечить заявленный положительный эффект, так как в единой оболочке заявленное расстояние между антеннами не может быть выполнено. Таким образом, выполнение ГПБА в виде 2-х независимых антенн обеспечивает заявленному техническому решению новое свойство (однозначность пеленга в кормовых углах) при этом построение тракта (связи) и признак - расстояние между антеннами вводятся новыми. Все это позволяет считать предложенное решение соответствующим критерию "существенные отличия".
Сущность заявленного технического решения поясняется чертежами:
Фиг.1 - представляет неоднозначность определения пеленга ГАС с ГПБА;
фиг.2 - блок-схему прототипа;
фиг.3 - блок-схему предлагаемого устройства;
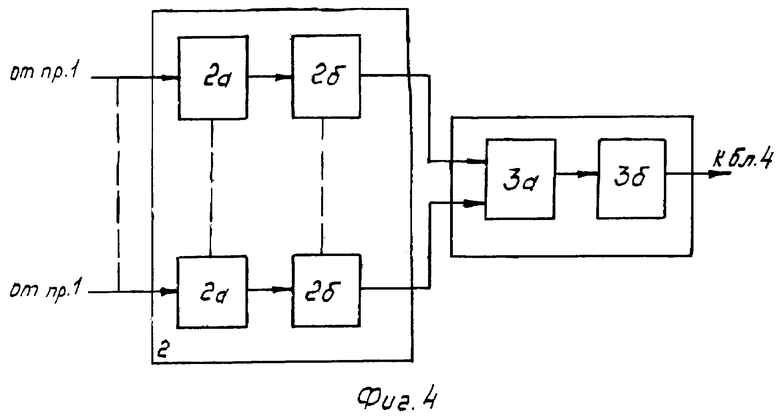
фиг.4 - устройство предварительной обработки информации, блок аналого-цифрового преобразования и уплотнения цифровой информации;
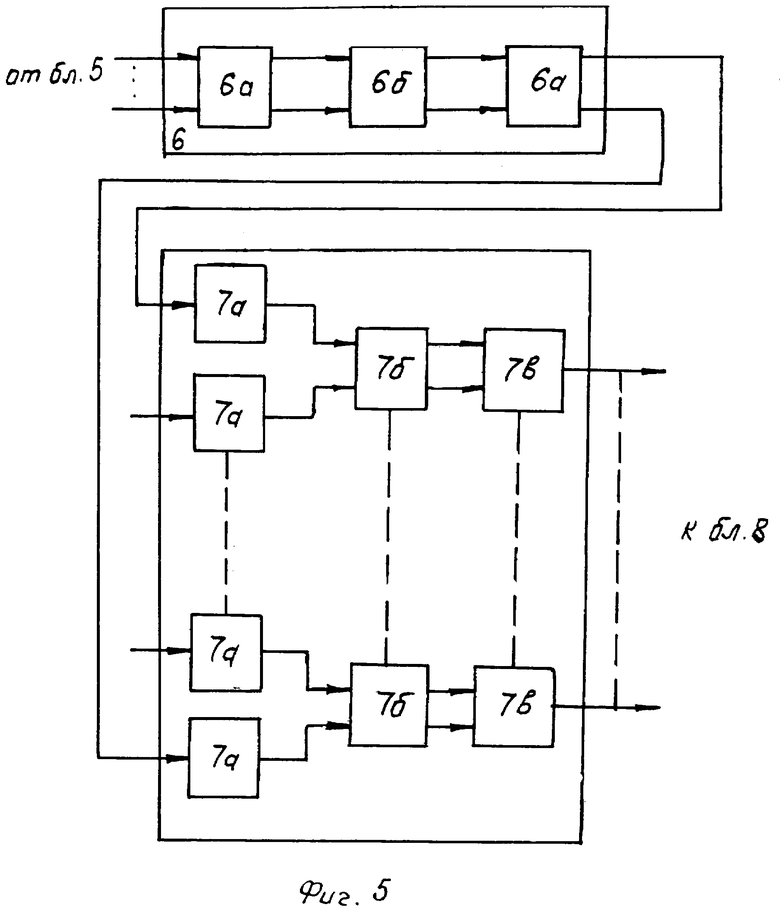
фиг.5 - спектроанализатор и формирователь характеристик направленности, устройство временной и пространственной обработки;
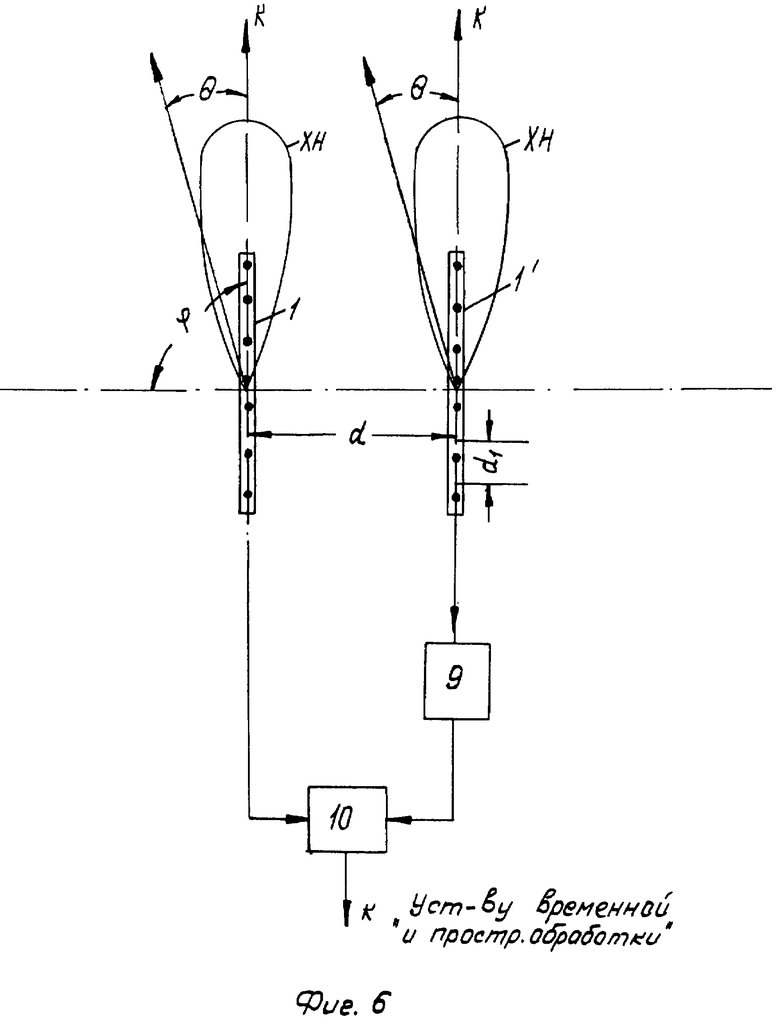
фиг.6 - структурную схему, поясняющую идею использования двух антенн и линию задержки с умножителем;
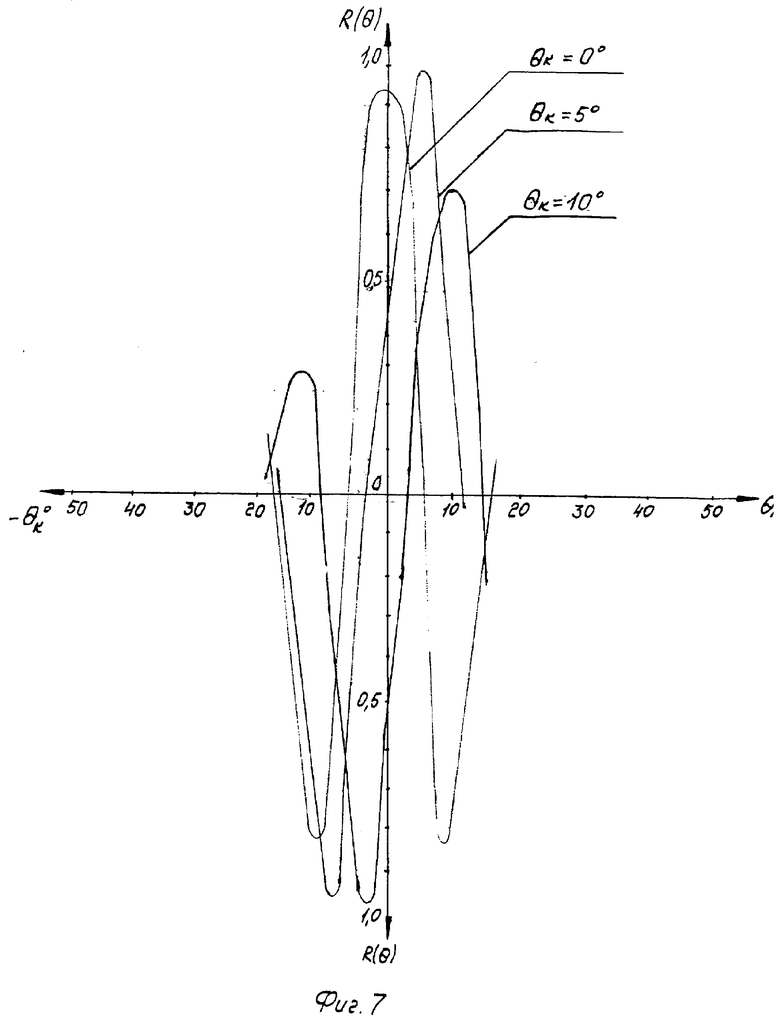
фиг.7 - характеристики направленности совместной работы двух антенн для различных углов компенсации в кормовых углах обзора;
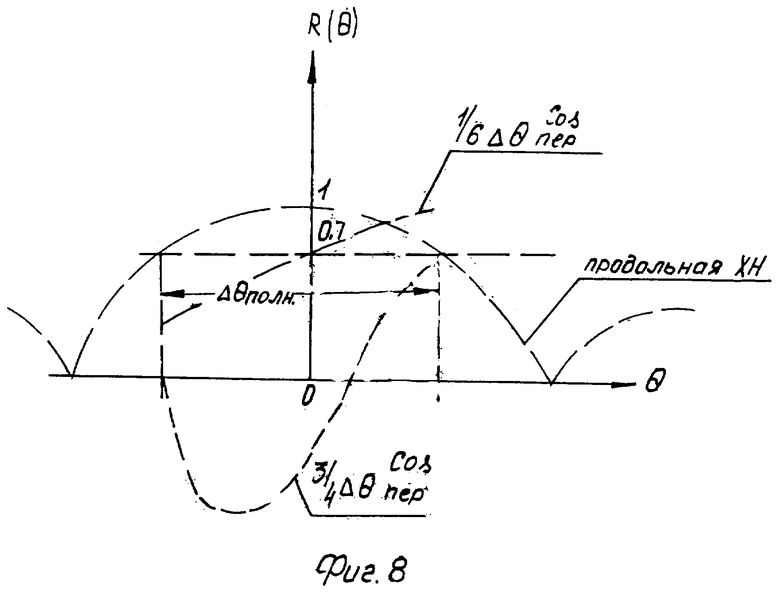
фиг.8 - определение условия однозначности пеленгования в кормовом секторе обзора.
Наименования блоков приведены ниже.
Тракт шумопеленгаторной станции с ГПБА в соответствии с предлагаемым изобретением (фиг.3) содержит две гибкие протяженные буксируемые антенны (1-1'), два устройства предварительной обработки сигналов (2-2'), два устройства цифроаналогового преобразования и уплотнения информации (3-3'), два кабель-троса (4-4'), два устройства разуплотнения и запоминания информации (5-5'), два спектроанализатора и формирователя характеристик направленности (6-6'), устройство пространственной и временной обработки (7), устройство индикации и регистрации сигналов (8), устройство компенсации разности времен прихода звуковых волн, содержащее две линии задержки с n-отводами (9-9'), два n - канальных умножителя (101-10n и 101'-10n'), причем каждая гибкая протяженная буксируемая антенна последовательно соединена со своим устройством предварительной обработки сигналов, устройством цифроаналогового преобразования и уплотнения информации, кабель-тросом, устройством разуплотнения и запоминания информации, спектроанализатором и формирователем характеристик направленности, линией задержки с n-отводами и n-канальным умножителем, а выходы двух n-канальных умножителя последовательно с устройством пространственной и временной обработки и устройством индикации и регистрации сигналов.
Практическое исполнение блоков предлагаемого устройства "Тракт шумопеленгаторной станции с ГПБА" известно из технической литературы.
В частности, особенности построения ГПБА (1-1'), состоящие на вооружении зарубежных стран, изложены в обзорной статье А.А.Гурвич и др. Гидроакустические системы с ГПБА в журнале "Судостроение за рубежом" №10, Л.: Судостроение, 1984, с.34-52.
Устройство предварительной обработки сигналов (2-2') предназначено для многоканального усиления и фильтрации сигналов с приемников ГПБА (фиг.4), реализуется с использованием набора малошумных усилителей на полевых транзисторах и фильтрах нижних частот. Малошумный усилитель (2a) разработан для усиления сигналов в полосе частот 20 Гц-20 кГц от пьезокерамического преобразователя. Такой усилитель имеет высокое входное сопротивление, малые габариты и потребляемую мощность. Схема подобного усилителя приведена в книге: А.Н.Игнатов. Полевые транзисторы и их применение. М.: Радио и связь, 1984, рис.4.11. Фильтры нижних частот (2б) используются в виде аналоговых интегральных микросхем (см. Б.Успенский. "Активные RC-фильтры", сборник: "В помощь радиолюбителю", вып.92, М.: ДОСААФ СССР, 1980)
Блок аналого-цифрового преобразования и уплотнения цифровой информации (3-3') строится с использованием последовательно соединенных аналогового коммутатора (3а) и аналого-цифрового преобразователя (АЦП) (3б). Эти элементы имеются в виде интегральных микросхем в кн. под ред. С.В.Якубовского, М.: Радио и связь, 1985, 357, 371 с.
Устройство разуплотнения и запоминания цифровой информации (5-5') широко используется в цифровой вычислительной технике и является обязательным элементом любой ЭВМ (см., например, кн. "Полупроводниковые запоминающие устройства и их применение" под ред. А.Ю.Гордонова, М.: Радио и связь, 1981, фиг.3.1, 3.5, 3.15).
Спектроанализатор и формирователь характеристик направленности (6-6') фиг.5 реализуется на спецпроцессорах БПФ (блок 6а), а устройство запоминания цифровой информации (6б) аналогично устройству (5). Спецпроцессоры БПФ получили распространение в измерительной технике. Например, устройство типа Брюэль и Къер, Дания (см. кн. А.К.Новиков, "Статистические измерения в судовой акустике". Л.: Судостроение, 1985 г., 157 с). Особенности построения спецпроцессоров БПФ изложены в кн. Л.Робинер, Б.Гоулд. "Теория и применение цифровой обработки сигналов", перевод с англ. М.: Мир, 1978 г., гл.10. Специализированные устройства для выполнения БПФ, блок-схема фиг.10.18, 10.21. Имеются также отечественные образцы аналогичных спектроанализаторов, реализующих указанную функцию средствами цифровой и аналоговой техники (анализатор спектра вычислительный СК4-72/2, ЕЭ1.406.008).
Устройство временной и пространственной обработки (7) (фиг.5) является многоканальным устройством, осуществляющим в каждом канале получение квадрата модуля спектральных составляющих, вычисленных в блоке (6) с помощью квадратов (7а) и сумматоров (7б) и накопление последовательно полученных величин в накапливающих сумматорах (7в). Указанные элементы устройства реализуются с помощью интегральной микросхемотехники (см. справочник "Интегральные микросхемы", под ред. Б.В.Тарабрина, М.: Радио и связь, 1983, 59 с).
Функции блоков (5)-(7) реализуются также средствами программируемой вычислительной техники с использованием миниЭВМ или микропроцессоров, как это сделано в прототипе.
Устройство компенсации разности времен прихода звуковых волн (фиг.3) представляет собой систему формирования и управления характеристикой направленности, состоящую из цифровой линии задержки с n-отводами, предназначенной для задержки сигналов от устройства формирования характеристик направленности одной антенны относительно (9-9') с последующим перемножением этих сигналов в умножителях (101-10n) и (101'-10n'). Построение цифровых блоков управления формированием характеристик направленности рассмотрено в кн.: Л.К.Самойлов. "Электронное управление характеристиками направленности антенн", Л.: Судостроение, с.219-230 §5.5. Синхронные цифровые блоки управления формированием характеристик направленности в приеме, рис.5.11, 5.20. В структуре цифровых блоков управления характеристиками направленности временного типа используются цифровые многоразрядные регистры сдвига и цифровые умножители. Цифровые системы управления формированием характеристик направленности являются специализированными вычислительными устройствами, которые обладают высокой производительностью и выполняются на основе использования ЭВМ (см. кн. У.Титце и К.Шенк: "Полупроводниковая схемотехника", перевод с нем. под ред. А.Г.Алексеенко, М.: Мир, 1983, с.339, рис.19.38).
Тракт шумопеленгаторной станции с ГПБА функционирует следующим образом.
Информация с электроакустических приемников, принятая многоканальной антенной решеткой (1-1'), поступает на систему предварительной обработки (2-2'), где осуществляется усиление и фильтрация сигналов и далее на устройство аналого-цифрового преобразования и уплотнения сигналов (3-3'). Затем по кабель-тросу (4-4'), преобразованная в цифровую форму информация передается на борт корабля, где производится разуплотнение и запоминание информации (5-5'). С выходов устройства разуплотнения и запоминания, информация поступает на спектроанализатор и систему формирования характеристик направленности (СФХН) (6-6'), где на основе двумерного быстрого преобразования Фурье производится спектральный анализ сигналов и формирование веера характеристик направленности одной и другой антенной решетки. С выходов пространственных каналов одной СФХН (6) сигналы поступают на линию задержки с n-отводами (9), осуществляющую компенсацию волнового фронта падающей волны одной антенны относительно другой для одной половины кормовых углов от 0-го направления, а с выходов пространственных каналов другой СФХН (6') сигналы поступают на линию задержки с n-отводами (9'), осуществляющую компенсацию волнового фронта падающей волны другой антенны относительно первой для другой половины кормовых углов от 0-го направления. Нулевое продольное направление подается помимо линий задержек. С отводов линий задержек (9-9') и нулевого направления сигналы подаются на вход двух n-канальных умножителя (101-10n и 101'-10n') и умножитель для 0-го продольного направления (10o), с выходов которых информация поступает на устройство пространственной и временной обработки, в которой осуществляется согласованная фильтрация сигналов и далее на систему индикации и регистрации, где информация регистрируется на экране электронно-лучевой трубки в координатах "курсовой угол - частота" и "курсовой угол - время".
Ниже дается принципиальная оценка возможности устранения неоднозначности пеленгования в корме с помощью предлагаемого устройства.
На фиг.6 показана функциональная схема обработки сигнала в одном канале.
Обозначения на фиг.6:
1-1 - антенны,
ХН1-ХН1' - характеристики направленности одной и другой антенн в кормовом направлении соответственно,
0 - угол прихода звуковой волны относительно нулевого продольного направления,
d - расстояние между антеннами,
d1- расстояние между приемниками антенны,
9 - линия задержки,
10 - умножитель,
L - длина антенны,
ϕ - угол прихода звуковой волны, относительно нормали к антенне,
К - кормовое продольное направление.
Модуль характеристики направленности линейной антенной решетки определяется выражением:
где λ - длина волны

С учетом (1) и (2) и нормирования для модуля характеристики направленности, получим:
где: 
Для двух антенн с учетом разности хода лучей:

где Δ - разность хода лучей,
τ - время задержки,
c - скорость звука, получим,

где θk - угол компенсации.
Таким образом, в результате задержки и умножения сигналов двух антенн с учетом (3) и (5) получим формулу для характеристики направленности:

Из (6) следует:
- при определенной длине антенны L и расстоянии между секциями антенны d1, можно найти такое значение расстояния между двумя антеннами d (в соответствующем диапазоне частот), для которого произведение квадрата характеристик направленности антенн на Cos угла, учитывающего разность хода лучей Δ и запаздывание сигнала во времени τ (одной антенны относительно другой) при определенном угле компенсации θk, дает возможность получить такую характеристику направленности в кормовом направлении, обеспечивающую однозначное определение пеленга на цель.
Это достигается при расстоянии между антеннами ˜9 м для диапазона частот до 375 Гц.
Из (6) определяется условие, при котором выполняется однозначное пеленгование в кормовом секторе (фиг.8).
1. Для продольной характеристики направленности антенн (первый множитель в формуле (6)) по уровню 0,7 имеем:
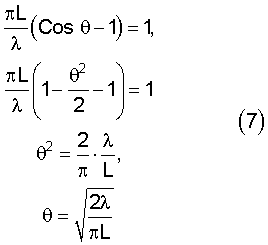
Для полного раствора характеристики направленности антенн по уровню 0,7 имеем:

или
2. Для характеристики направленности антенн (второй множитель в формуле (6)) c учетом целого периода Cos по уровню 0,7 имеем:

Три четверти периода составит:

Из фиг.8 и выражений (8) и (10) получаем, что условие однозначности пеленгования будет соблюдаться при:
или


Это условие должно выполняться на верхней частоте поддиапазона, так как с понижением частоты оно выполняется автоматически, поскольку Δθполн0,7 растет медленнее чем 
Пример: 1) Пусть d=8 м, L=80 м,
тогда 
что соответствует fв=420 Гц
2) d=8 м, L=23 м, 
что соответствует fв=120 Гц.
Нижняя частота поддиапазона определяется из условия (см. фиг.8), чтобы скомпенсированная на край продольной характеристики направленности (ХН) косинусная ХН на этом краю имела бы уровень 1,0, а на другом краю продольной ХН уровень 0,5. При этом произведение продольной ХН на косинусную на одной краю равен 0,35, а на другом 0,7.
Косинусная ХН имеет уровень 0,5 на 1/6 периода косинуса или:
Так как L и d остаются постоянными, отношение λв и λн составляет значение, равное 20 (ср. формулы (11) и (12)). Таким образом, отношение верхней и нижней частоты очень велико.
На нижней частоте пеленгование может осуществляться только при большом отношении сигнал/помеха, но условия однозначности пеленгования будут выполняться.
Технико-экономический эффект от использования предлагаемого изобретения заключается в следующем:
Гидроакустические станции подобного типа предназначены для установки на подводных лодках и надводных кораблях. При этом (за счет использования предлагаемого изобретения) резко возрастают тактические и экономические возможности корабля. Во-первых, однозначное обнаружение целей обеспечит своевременное принятие решения командиром по уклонению или уничтожению противника.
Кроме того, что весьма важно, однозначное пеленгование целей в кормовом секторе приводит к достаточно высокой скрытности плавания ПЛ, так как при этом исключается дополнительное маневрирование, что всегда связано с резким возрастанием шумоизлучения ПЛ, появлением новых дискрет и как следствие повышение возможности обнаружения и классификации ПЛ гидроакустическими средствами противника.
Кроме того, в значительной мере сократит расход горючего, так как исключается необходимость дополнительного маневрирования для определения направления на обнаруженную цель.
В соответствии с формулой (6) произведен расчет характеристик направленности для различных углов компенсации:
θк=0, 5°, 10°.
Расстояние между антеннами d=9 м, длина антенны L=92 м, расстояние между секциями антенны d1=1,92 м, частота fв=375 Гц.
Расчет проводился в секторе, охватывающем кормовые углы ±20°.
Результирующие графики характеристики направленности показаны на фиг.7. Из графиков видно отсутствие появления неоднозначности в определении пеленга в заданных кормовых углах.
Имеется один явно выраженный максимум в направлении угла компенсации.
Из графиков фиг.7 также следует, что раствор характеристики направленности в кормовом направлении при угле компенсации, например 0° на уровне 0,7 равен 6°, что в три раза уже раствора характеристики направленности на уровне 0,7, формируемой одной антенной в продольном направлении.
Таким образом, поставленная цель устранения неоднозначности пеленгования в кормовом секторе обзора при использовании предлагаемого изобретения достигается.
Перечень наименований блоков и обозначений, отображенных на чертежах
Фиг.1 - к неоднозначности определения пеленга ГАС с ГПБА:
Ц - цель;
МЦ - мнимая цель;
ХН - характеристика.
Фиг.2 - блок-схема прототипа:
1 - антенна;
2 - устройство предварительной обработки сигналов;
3 - устройство аналого-цифрового преобразования и уплотнения информации;
4 - кабель-буксир;
5 - устройство разуплотнения и запоминания информации;
6 - спектроанализатор и формирователь характеристики направленности;
7 - устройство временной и пространственной обработки;
8 - устройство индикации и регистрации.
Фиг.3 - блок-схема предлагаемого устройства:
1-1' - две гибкие протяженные буксируемые антенны;
2-2' - два устройства предварительной обработки сигналов;
3-3' - два устройства цифро-аналогового преобразования и уплотнения информации;
4-4' - два кабель-троса;
5-5' - два устройства разуплотнения и запоминания информации;
6-6' - два спектроанализатора и формирователя характеристик направленности;
7 - устройство пространственно-временной обработки;
8 - устройство индикации и регистрации сигналов;
9-9' - две линии задержки с n-отводами;
(101-10n) и (101'-10n') - два n-канальных умножителя.
Фиг.4 - устройство предварительной обработки информации, блок аналого-цифрового преобразования и уплотнения цифровой информации:
2а - малошумный усилитель;
2б - фильтры нижних частот;
3а - аналоговый коммутатор;
3б - аналого-цифровой преобразователь.
Фиг.5 - спектроанализатор и формирователь характеристик направленности, устройство временной и пространственной обработки:
6а - спецпроцессоры БПФ;
6б - устройство запоминания цифровой информации;
7а - устройство вычисления квадратов модулей;
7б - сумматоры;
7в - накапливающие сумматоры.
Фиг.6 - структурная схема, поясняющая идею использования двух антенн и линию задержки с умножителем:
1-1' - антенны;
ХН1-ХН1' - характеристики направленности одной и другой антенн в кормовом направлении;
θ - угол прихода звуковой волны относительно нулевого продольного направления;
d - расстояние между антеннами;
d1- расстояние между секциями антенн;
9 - линия задержки;
10 - умножитель;
L - длина антенны;
ϕ - угол прихода звуковой волны относительно нормали к антенне;
k - кормовое продольное направление.
Фиг.7 - характеристики направленности совместной работы двух антенн для различных углов компенсации в кормовых углах обзора:
θk - угол компенсации;
R(θ) - модуль характеристики направленности.
Фиг.8 - к определению условия однозначности пеленгования в кормовом секторе обзора:
 - раствор характеристики направленности по уровню 0,7 для двух антенн;
- раствор характеристики направленности по уровню 0,7 для двух антенн;
 - три четверти периода косинуса для двух антенн.
- три четверти периода косинуса для двух антенн.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2017 |
|
RU2653956C1 |
| СПОСОБ ИЗМЕРЕНИЯ СОБСТВЕННОГО ПОДВОДНОГО ШУМОИЗЛУЧЕНИЯ И ШУМОИЗМЕРИТЕЛЬ | 1989 |
|
SU1840603A1 |
| ПРИЕМНЫЙ ТРАКТ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ С ЛИНЕЙНОЙ АНТЕННОЙ, УСТРАНЯЮЩИЙ НЕОДНОЗНАЧНОСТЬ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА СИГНАЛА | 2000 |
|
RU2190237C2 |
| Система шумопеленгования гидроакустического комплекса подводной лодки | 2020 |
|
RU2735630C1 |
| Шумопеленгаторная станция для подводной лодки | 2022 |
|
RU2791851C1 |
| Система шумопеленгования гидроакустического комплекса подводной лодки | 2016 |
|
RU2660377C2 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2019 |
|
RU2715409C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ШУМОИЗЛУЧЕНИЯ КОРАБЛЯ | 1982 |
|
SU1840366A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОДВОДНОЙ ШУМНОСТИ КОРАБЛЯ-ЦЕЛИ | 1989 |
|
SU1840512A1 |
| СПОСОБ НАПРАВЛЕННОГО ПРИЕМА ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ | 1990 |
|
SU1840431A1 |
Изобретение относится к области гидроакустики и предназначено для использования в гидроакустических станциях с гибкой протяженной буксируемой антенной. Техническим результатом изобретения является обеспечение однозначности пеленгования в кормовом секторе. Для чего тракт шумопеленгаторной станции с гибкой протяженной антенной содержит вторую гибкую протяженную буксируемую антенну, второе устройство предварительной обработки сигналов и второе устройство аналого-цифрового преобразования и уплотнения информации, второй спектроанализатор и m-канальный формирователь характеристик направленности, две линии задержки с n-отводами и два n-канальных умножителя, компенсирующих пространственное направление прихода звуковой волны в кормовом секторе. Также определено расстояние между антеннами в горизонтальной плоскости. 8 ил.
Шумопеленгаторная станция, содержащая гибкую протяженную буксируемую антенну, подключенную к последовательно соединенным приемному каналу, блоку пространственно-временной обработки и индикатору, причем приемный канал выполнен в виде последовательно соединенных тракта предварительного усиления, спектроанализатора и m-канального формирователя характеристик направленности, отличающийся тем, что, с целью обеспечения однозначности пеленгования в кормовом секторе, в нее введены последовательно соединенные вторая гибкая протяженная буксируемая антенна и второй приемный канал, а также две n - отводные линии задержки, одноканальный и два n - канальных умножителя, где n<m, причем вход первой линии задержки, первый вход одноканального умножителя и первые входы первого n - канального умножителя подключены к выходу нулевого направления первого m-канального формирователя характеристик направленности, вход второй линии задержки, второй вход одноканального умножителя и первые входы второго n -канального умножителя подключены к выходу нулевого направления второго m-канального формирователя характеристик направленности, вторые входы первого и второго n - канальных умножителей подключены соответственно к выходам второй и первой линий задержки, а выходы всех умножителей соединены с входами блока пространственно-временной обработки, при этом гибкие протяженные антенны разнесены в горизонтальной плоскости на расстояние d, определяемое из соотношения d2≤λL/4,5,
где λ - длина волны принимаемого сигнала, мм;
L - длина гибкой протяженной буксируемой антенны, мм.
| Патент США №4173148, НКИ 340-6, 1978 | |||
| Термосно-паровая кухня | 1921 |
|
SU72A1 |

