Изобретение относится к области гидроакустики и гидролокации и предназначено для поиска и обнаружения искусственных подводных объектов, таких как затонувшие корабли, техника, подводные аппараты, трубопроводы и другие искусственные подводные сооружения.
Из анализа уровня техники известен «Гидролокатор обнаружения и классификации подводных и надводных целей для надводных кораблей» [Патент РФ 20389, G01S 15/02, опубликовано 27.10.2001 г.], содержащий многоэлементную акустическую антенну, многоканальные тракты излучения и приема, подключенные к акустической антенне, цифровой вычислительный комплекс, содержащий задающий генератор, подключенный к тракту излучения, устройство цифровой обработки эхо-сигналов, подключенное к выходу приемного тракта, и пульт индикации и управления, отличающийся тем, что в состав устройства цифровой обработки сигналов дополнительно включены устройство формирования классификационного зондирующего сигнала, подключенное ко входу тракта излучения параллельно задающему генератору, и устройство цифровой обработки и классификации эхо-сигнала классификационного зондирующего сигнала, вход которого соединен с выходом устройства пространственно-временной обработки устройства цифровой обработки эхо-сигналов.
Известен также «Способ обнаружения эхосигнала гидролокатора» [Патент РФ 2293358, G01S 15/04, опубликовано 10.02.2007 г.], который содержит излучение зондирующего сигнала, прием в смеси с шумовой помехой эхо-сигнала гидроакустической антенной, дискретизацию электрического сигнала на выходе гидроакустической антенны, набор дискретизированных отсчетов электрического сигнала длительностью Т, получение последовательно, через равные промежутки времени за все время обнаружения наборов дискретизированных отсчетов электрического сигнала и быстрое преобразование Фурье полученных наборов дискретизированных отсчетов, при этом по каждому набору дискретизированных отсчетов электрического сигнала определяют комплексный спектр, сдвиг наборов осуществляют на время 1/8Т<Т<1/2Т, запоминают каждый предыдущий и каждый последующий комплексный спектры, определяют взаимный спектр между каждым предыдущим и каждым последующим наборами, выбирают набор с максимальным энергетическим спектром, по которому принимают решение об обнаружении сигнала.
Все известные выше решения и другие известные существующие обнаружители эхо-сигнала в гидролокаторе сравнивают уровень совокупности шума и сигнала с уровнем шума, и при превышении заданного порога принимается решение, что искомый объект обнаружен [Евтютов А.П., Митько В.Б. Инженерные расчеты в гидроакустике - Л.: Судостроение, 1988. - стр. 34]. Для увеличения дальности обнаружения используется согласованный прием, позволяющий получить на выходе согласованного фильтра более высокое отношение сигнал-помеха (ОСП).
Недостатком такого подхода является тот факт, что существует теоретический предел ОСП, при котором возможно подобное детектирование с заданной вероятностью ложной тревоги. Это приводит к ограничению предельной дальности действия обнаружителя при заданной вероятности ложной тревоги.
Наиболее близким к предлагаемому является «Устройство обнаружения подводных объектов по оценке меры случайности эхо-сигнала гидролокатора» [Патент РФ 83344, G01S 15/04, опубликовано 27.05.2009 г.], содержащее блок приемоизлучателей (гидроакустическую антенну), функцией которого является посылка локационного сигнала и прием эхо-сигнала, блок аналого-цифровых преобразователей (АЦП), блок усилителей и полосовых фильтров, функцией которого является усиление сигнала на выходе гидроакустической антенны до уровней, необходимых для работы АЦП, блок согласованных фильтров, функцией которых является осуществление оптимального приема отраженного эхо-сигнала на фоне помех, генератор сигнала посылки, усилитель мощности, измеритель фрактальной размерности, выполненный с возможностью осуществлять оценку меры случайности амплитуд эхо-сигнала на выходе согласованного фильтра и выражать эту меру в виде числа (фрактальной размерности), детектор, функцией которого является сравнение полученного числа с порогом энергии сигнала и помехи и принятие решения: обнаружен искомый объект локации или нет.
Недостатком данного устройства является то, что измерение фрактальной размерности различных объектов (естественных и искусственных) является неоднозначно решаемой задачей, поскольку нет точного определения самого понятия фрактальной размерности [Мандельброт Б. Фрактальная геометрия природы. - М.: Институт компьютерных исследований, 2002. - Стр. 31; Федер Е. Фракталы: Пер. с англ. - М.: Мир, 1991. - Стр. 19] и, как правило, отсутствует необходимое количество данных. Поэтому фрактальную размерность какого-либо образования измеряют косвенно - по наклону зависимости измеряемого значения от масштаба, что приводит к появлению случайной погрешности при неоднозначности аппроксимации и, как следствие, к размыванию границы порога и возникновению неоднозначности обнаружения.
Техническим результатом применения предлагаемого устройства является уменьшение случайной погрешности и, следовательно, увеличение достоверности обнаружения объекта в присутствии шумов и помех.
Указанный технический результат достигается тем, что в устройстве обнаружения подводных объектов, содержащем блок приемоизлучателей, блок усилителей и полосовых фильтров, блок аналого-цифровых преобразователей, блок согласованных фильтров, соединенный с измерительным устройством, генератор сигнала посылки, усилитель мощности и детектор, согласно заявляемому изобретению, измерительное устройство выполнено с возможностью измерения параметра формы распределения и характеристической частоты эхо-сигнала на выходе согласованного фильтра и соединено с вычислителем отношения параметра формы распределения и характеристической частоты эхо-сигнала, при этом выход вычислителя соединен со входом детектора.
Измерительное устройство содержит блок ранжирования эхо-сигнала по возрастанию, блок вычисления объема выборки эхо-сигнала, первый и второй блоки вычисления отношения средневыпрямленного значения эхо-сигнала к средневыпрямленному значению приращения эхо-сигнала, блок, задающий масштабирующий коэффициент, первый и второй блоки умножения и блок деления, причем измерительное устройство выполнено с возможностью параллельной подачи эхо-сигнала на вход блока вычисления объема выборки эхо-сигнала, вход первого блока вычисления отношения средневыпрямленного значения эхо-сигнала к средневыпрямленному значению приращения эхо-сигнала и вход блока ранжирования эхо-сигнала по возрастанию, к выходу которого подключен второй блок вычисления отношения средневыпрямленного значения эхо-сигнала к средневыпрямленному значению приращения эхо-сигнала, ко входам первого блока умножения подключены выход блока, задающего масштабирующий коэффициент, и выход второго блока вычисления отношения средневыпрямленного значения эхо-сигнала к средневыпрямленному значению приращения эхо-сигнала, выход блока вычисления объема выборки эхо-сигнала и выход первого блока умножения связаны с соответствующими входами второго блока умножения, на выходе которого формируется значение параметра формы распределения эхо-сигнала, при этом выход первого блока вычисления отношения средневыпрямленного значения эхо-сигнала к средневыпрямленному значению приращения эхо-сигнала и выход первого блока умножения связаны с соответствующими входами блока деления, на выходе которого формируется значение характеристической частоты эхо-сигнала. Сущность технического решения поясняется чертежами, где
- на Фиг. 1 показана блок-схема предлагаемого устройства обнаружения подводных объектов;
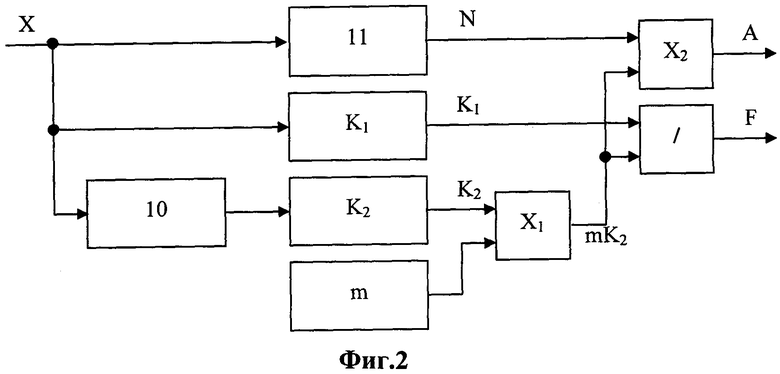
- на Фиг. 2 представлена блок-схема измерительного устройства;
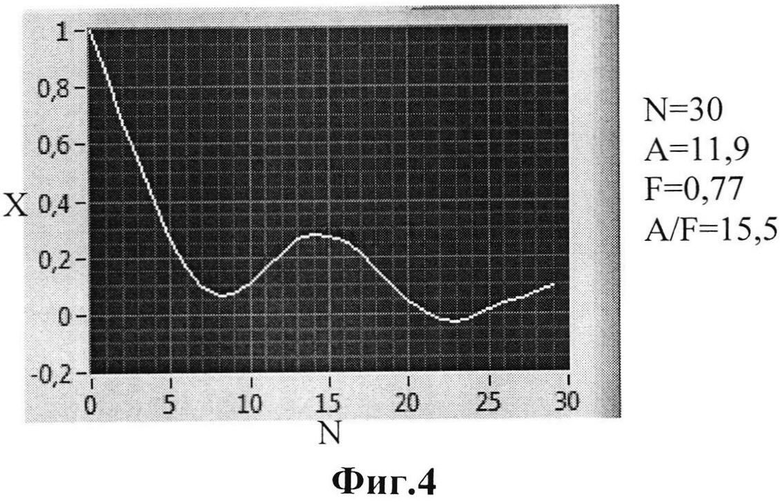
- на Фиг. 3 и Фиг. 4 представлены характерные формы эхо-сигналов и их характеристики на входе измерительного устройства для случая, когда объект не обнаружен (фиг. 3) и обнаружен (фиг. 4).
Устройство обнаружения объектов в водной среде содержит блок приемоизлучателей (гидроакустическую антенну) 1, блок усилителей и полосовых фильтров 2, блок аналого-цифровых преобразователей 3, блок согласованных фильтров 4, генератор сигнала посылки 5, усилитель мощности 6, измерительное устройство 7, вычислитель 8 и детектор 9.
Устройство обнаружения объектов в водной среде может быть выполнено в виде отдельной печатной платы с внешней приемо-передающей антенной, в виде нескольких плат либо в составе гидролокационного комплекса.
Гидроакустическая антенна 1 расположена отдельно от остальных блоков устройства для обеспечения непосредственного контакта с водной средой. В качестве антенны может выступать любая гидроакустическая антенна как пьезоакустическая, так и индукционная, антенная решетка или единый приемоизлучающий элемент.
Блок усилителей и полосовых фильтров 2 и усилитель мощности 6 являются аналоговыми и должны располагаться как можно ближе к антенне для уменьшения электрических шумов в устройстве обнаружения объектов в водной среде.
Усилитель и полосовой фильтр 2 могут быть реализованы на операционных усилителях, состоять из одного или более каскадов, и основное требование к данному блоку состоит в получении на входе блока аналого-цифровых преобразователей (АЦП) 3 эхо-сигнала в заданной полосе частот и с заданным коэффициентом усиления.
Блок аналого-цифровых преобразователей 3 является интерфейсным между аналоговой и цифровой частями платы, и конструктивно располагается на цифровой части. Блок АЦП использует стандартные микросхемы аналогово-цифрового преобразования с требуемой разрядностью, частотой дискретизации и интерфейсом.
Блоки генератора 5, согласованного фильтра 4, измерительного устройства 7, вычислителя 8 и детектора 9 относятся к цифровой части платы и могут быть выполнены в виде процессора или микроконтроллера.
Согласованный фильтр 4 рассчитывается для обнаружения сигнала заранее известной формы, сгенерированной блоком генератора, выходной сигнал фильтра при этом не совпадает по форме ни со входным, ни с сигналом, для обнаружения которого фильтр предназначен. Сигнал, с которым фильтр согласован, однако, при наличии его во входном сигнале с шумом, позволяет получить максимальную амплитуду выходного сигнала фильтра, то есть данный фильтр максимизирует отношение сигнал/помеха для известного сигнала.
Генератор 5 является цифровым, расположенным внутри процессора, и выполняет функцию генерации в заданные моменты времени зондирующего сигнала. Для надежной работы детектора такими сигналами могут быть как простые короткие сигналы, так и сложные сигналы большой длительности.
Усилитель мощности 6 необходим для обеспечения максимальной дистанции обнаружения путем обеспечения максимальной энергии сигнала посылки.
Принципиальным отличием предлагаемого устройства является использование в нем измерительного устройства, измеряющего два параметра - параметр формы распределения эхо-сигнала и его характеристическую частоту, а также вычислителя отношения результатов этих измерений.
Измерительное устройство 7 предназначено для измерения двух параметров эхо-сигнала - параметра формы распределения и характеристической частоты. Эти параметры были впервые использованы в работе [Горшенков А.А, Кликушин Ю.Н. Представление моделей сигналов в системе идентификационных параметров [Электронный ресурс] // Журнал радиоэлектроники. - 2010. - №9. - Режим доступа: http://jre.cplire.ru], для количественной оценки множества отсчетов, из которых состоит любой квантованный и дискретизированный сигнал.
Физический смысл параметра формы А состоит в том, что он численно характеризует форму распределения эхо-сигнала.
Физический смысл параметра F, названного характеристической частотой, состоит в том, что он определяет количество локальных одноименных экстремумов эхо-сигнала за единицу времени. Характеристическая частота для периодических сигналов численно равна их собственной частоте.
Эмпирическим путем авторы работы [Горшенков А.А, Кликушин Ю.Н. Представление моделей сигналов в системе идентификационных параметров [Электронный ресурс] // Журнал радиоэлектроники. - 2010. - №9. - Режим доступа: http://jre.cplire.ru] установили, что параметр формы и характеристическая частота на логическом уровне совместно задают вид распределения случайных сигналов в соответствии с данными таблицы 1.
Таблица 1 называется идентификационной шкалой распределений (ИШ) и связывает параметр формы и характеристическую частоту на выходе измерительного устройства с именами случайных сигналов с двумодальным (2МОД), арксинусным (АРКС), равномерным (РАВН), трапецеидальным (ТРАП), треугольным (СИМП), нормальным (НОРМ), двусторонним экспоненциальным (ЛАПЛ) и Коши (КОШИ) законами распределения. Усреднения проводились по количеству реализаций L=100, объем выборки N=10000, время наблюдения сигнала tн=1 с.
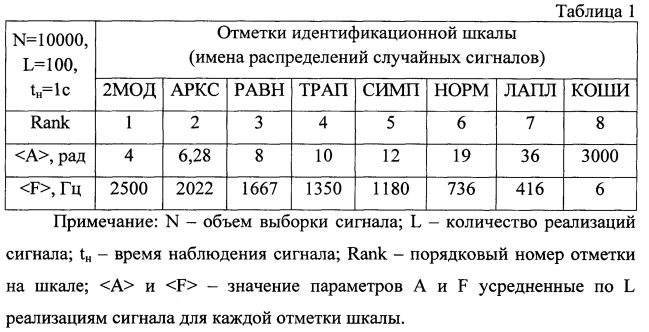
Фундаментальный характер идентификационной шкалы (Таблица 1) состоит в том, что она охватывает полный диапазон всех возможных форм распределений.
Блок-схема измерительного устройства 7 содержит блок ранжирования эхо-сигнала по возрастанию 10, блок вычисления объема выборки эхо-сигнала 11; первый и второй блоки вычисления отношения средневыпрямленного значения эхо-сигнала к средневыпрямленному значению приращения эхо-сигнала, соответственно K1 и K2; блок, задающий масштабирующий коэффициент - «m»; первый и второй блоки умножения «X1» и «X2»; блок деления «/».
Устройство работает следующим образом.
Генератор сигнала посылки 5 посылает импульсный сигнал через усилитель мощности 6 и блок приемоизлучателей 1 (гидроакустическую антенну) в морскую среду. Копия сигнала посылки попадает на блок согласованных фильтров 4, чтобы обеспечить максимальное отношение сигнал-помеха (ОСП) на выходе фильтра. Отраженный от объекта локации эхо-сигнал попадает на гидроакустическую антенну 1, проходит через блок усилителей и полосовых фильтров 2 для уменьшения уровня помех, попадает на блок АЦП 3 и затем - на блок согласованных фильтров 4.
Измерительное устройство 7 измеряет параметр формы А распределения и характеристическую частоту F эхо-сигнала на выходе блока согласованных фильтров 4. Вычислитель 8 вычисляет отношение параметра формы и характеристической частоты. Детектор сравнивает полученное число на выходе вычислителя с порогом и выдает сигнал об обнаружении искомого объекта локации.
Работа измерительного устройства заключается в следующем.
Эхо-сигнал, поступающий с выхода блока согласованных фильтров 4 в измерительное устройство 7 поступает параллельно на вход блока вычисления объема выборки эхо-сигнала 11, вход первого блока вычисления отношения средневыпрямленного значения эхо-сигнала к средневыпрямленному значению приращения эхо-сигнала K1 и вход блока ранжирования эхо-сигнала по возрастанию 10.
В блоке 11 вычисления объема выборки эхо-сигнала, представленного в виде реализации выборочных значений, определяется объем выборки N, который поступает на вход блока умножения «X2».
В блоке «K1» осуществляется вычисление отношения средневыпрямленного значения эхо-сигнала к средневыпрямленному значению приращения эхо-сигнала, значение которого поступает на вход блока деления «/».
В блоке 10 эхо-сигнал ранжируется по возрастанию и поступает на вход второго блока вычисления отношения средневыпрямленного значения эхо-сигнала к средневыпрямленному значению приращения эхо-сигнала K2, которое затем перемножается на масштабирующий коэффициент m в блоке «X1» и поступает на другой вход блока умножения «Х2» и параллельно - на вход блока деления «/».
Блок «m» задает значение масштабирующего коэффициента для согласования значения характеристической частоты F периодических сигналов с их собственной частотой. Экспериментальным путем было найдено значение масштабирующего коэффициента m=2.
Отношение средневыпрямленного значения эхо-сигнала к средневыпрямленному значению приращения эхо-сигнала в блоках «K1» и «K2» определяется аналогичным образом. Рассмотрим работу этих блоков на примере блока «K1».
Пусть на входе блока «K1» имеется дискретный эхо-сигнал X в виде ряда наблюдений {x1, x2, …, xN} объема N. Определяется средневыпрямленное значение эхо-сигнала  и средневыпрямленное значение приращения эхо-сигнала
и средневыпрямленное значение приращения эхо-сигнала  по формулам:
по формулам:
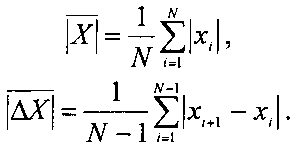
Затем, вычисляется параметр K:
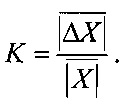
Параметр формы A распределения эхо-сигнала вычисляется путем перемножения объема наблюдений N на mK2 в блоке «Х2», а характеристическая частота эхо-сигнала F находится путем деления K1 на mK2 в блоке «/».
Вычислитель 8 реализует операцию отношения параметра формы А распределения и характеристической частоты F эхо-сигнала:

Детектор 9 реализует сравнение входных данных с пороговым значением:
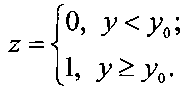
Где z=0 - объект не обнаружен, z=1 - объект обнаружен, y - входные данные, y0 - пороговое значение обнаружения устанавливается на стадии предварительной калибровки.
На фиг. 3 и фиг. 4 представлены примеры эхо-сигналов, действующих на входе измерительного устройства объема выборки N=30 для случая, когда объект не обнаружен (фиг. 3) и обнаружен (фиг. 4), а также приведены соответствующие им значения параметра формы A, характеристической частоты F и их отношения A/F.
Использование двух параметров, характеризующих один объект, дает уменьшение случайной погрешности в  раз [Новицкий П.В., Зограф И.А. Оценка погрешностей результатов измерений. - 2-е изд., перераб. и доп. - Л.: Энергоатомиздат, 1991. - Стр. 141], что, как следствие, приводит к увеличению достоверности обнаружения объекта в присутствии шумов и помех.
раз [Новицкий П.В., Зограф И.А. Оценка погрешностей результатов измерений. - 2-е изд., перераб. и доп. - Л.: Энергоатомиздат, 1991. - Стр. 141], что, как следствие, приводит к увеличению достоверности обнаружения объекта в присутствии шумов и помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645016C1 |
| Способ поиска затонувшего радиационного источника автономным необитаемым подводным аппаратом | 2023 |
|
RU2825830C1 |
| ВПЕРЕДСМОТРЯЩИЙ ГИДРОЛОКАТОР С ПОВЫШЕННЫМ РАЗРЕШЕНИЕМ ПО ДАЛЬНОСТИ | 2023 |
|
RU2802295C1 |
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
| ФАЗОВЫЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 2012 |
|
RU2510045C2 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ УТЕЧЕК ГАЗА | 2015 |
|
RU2592741C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| ВПЕРЕДСМОТРЯЩИЙ ГИДРОЛОКАТОР ГЛУБОКОВОДНОГО НОСИТЕЛЯ | 2019 |
|
RU2699938C1 |
| Гидролокационный способ классификации подводных объектов в контролируемой акватории | 2017 |
|
RU2650419C1 |
| СПОСОБ И УСТРОЙСТВО БЫСТРОГО ВЫЧИСЛЕНИЯ ФУНКЦИИ НЕОПРЕДЕЛЕННОСТИ СИГНАЛА С УЧЕТОМ РЕВЕРБЕРАЦИОННОЙ ПОМЕХИ | 2009 |
|
RU2487367C2 |

Использование: изобретение представляет собой электронное устройство и относится к области гидроакустики и гидролокации. Устройство предназначено для поиска и обнаружения искусственных подводных объектов, таких как затонувшие корабли, техника, подводные аппараты, трубопроводы и другие искусственные подводные сооружения. Сущность: устройство содержит блок приемоизлучателей (гидроакустическую антенну) (1), блок усилителей и полосовых фильтров (2), блок аналого-цифровых преобразователей (АЦП) (3), блок согласованных фильтров (4), генератор сигнала посылки (5), усилитель мощности (6), измерительное устройство (7), вычислитель (8) и детектор (9). Функцией блока согласованных фильтров является осуществление оптимального приема отраженного эхо-сигнала на фоне помех. Функцией измерительного устройства является измерение параметра формы распределения и характеристической частоты эхо-сигнала на выходе согласованного фильтра. Функцией вычислителя является вычисление отношения параметра формы и характеристической частоты эхо-сигнала. Функцией детектора является сравнение полученного числа на выходе вычислителя с пороговым значением и принятие решения: обнаружен искомый объект локации или нет. Технический результат: уменьшение случайной погрешности и увеличение достоверности обнаружения объекта в присутствии шумов и помех. 1 з.п. ф-лы, 1 табл., 4 ил.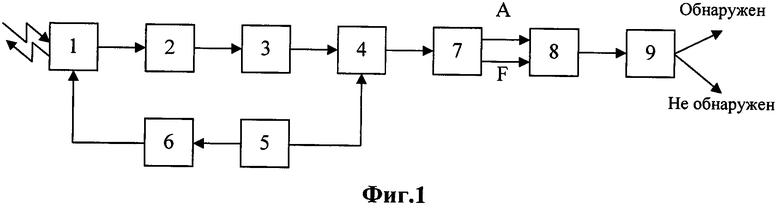
1. Устройство обнаружения подводных объектов, содержащее блок приемоизлучателей, блок усилителей и полосовых фильтров, блок аналого-цифровых преобразователей, блок согласованных фильтров, соединенный с измерительным устройством, генератор сигнала посылки, усилитель мощности и детектор, отличающееся тем, что измерительное устройство выполнено с возможностью измерения параметра формы распределения и характеристической частоты эхо-сигнала на выходе согласованного фильтра и соединено с вычислителем отношения параметра формы распределения и характеристической частоты эхо-сигнала, при этом выход вычислителя соединен со входом детектора.
2. Устройство по п. 1, отличающееся тем, что измерительное устройство содержит блок ранжирования эхо-сигнала по возрастанию, блок вычисления объема выборки эхо-сигнала, первый и второй блоки вычисления отношения средневыпрямленного значения эхо-сигнала к средневыпрямленному значению приращения эхо-сигнала, блок, задающий масштабирующий коэффициент, первый и второй блоки умножения и блок деления, причем измерительное устройство выполнено с возможностью параллельной подачи эхо-сигнала на вход блока вычисления объема выборки эхо-сигнала, вход первого блока вычисления отношения средневыпрямленного значения эхо-сигнала к средневыпрямленному значению приращения эхо-сигнала и вход блока ранжирования эхо-сигнала по возрастанию, к выходу которого подключен второй блок вычисления отношения средневыпрямленного значения эхо-сигнала к средневыпрямленному значению приращения эхо-сигнала, ко входам первого блока умножения подключены выход блока, задающего масштабирующий коэффициент, и выход второго блока вычисления отношения средневыпрямленного значения эхо-сигнала к средневыпрямленному значению приращения эхо-сигнала, выход блока вычисления объема выборки эхо-сигнала и выход первого блока умножения связаны с соответствующими входами второго блока умножения, на выходе которого формируется значение параметра формы распределения эхо-сигнала, при этом выход первого блока вычисления отношения средневыпрямленного значения эхо-сигнала к средневыпрямленному значению приращения эхо-сигнала и выход первого блока умножения связаны с соответствующими входами блока деления, на выходе которого формируется значение характеристической частоты эхо-сигнала.
| RU83344 U1, 27.05.2009 | |||
| СПОСОБ ОБНАРУЖЕНИЯ АНОМАЛИЙ МОРСКОЙ ПОВЕРХНОСТИ | 1997 |
|
RU2109304C1 |
| СПОСОБ СЪЕМКИ НИЖНЕЙ ПОВЕРХНОСТИ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2444760C1 |
| Устройство для протягивания проводов, тросов и т.п. в монтажных трубках | 1960 |
|
SU133504A1 |
| US6868041 B2, 15.03.2005. | |||

