Настоящее изобретение относится к герметизации трещины в стене бассейна атомной электростанции.
Такие трещины могут возникать в стенках бассейна, в частности в сварочных швах футеровки, которая обычно выполняется из стали. Например, внутренние стенки таких бассейнов могут покрываться листами нержавеющей стали, а края листов привариваться друг к другу. Упомянутые трещины часто возникают в местах сварки.
В таких случаях, как это описано в документе FR 2874020, для закрытия трещин в местах сварки используется самоклеящаяся полимерная лента (выполненная, к примеру, из эластомера и/или кремнийорганической смолы с необходимыми добавками).
Клейкий материал имеет защитное покрытие, например, в виде пленки из нержавеющей стали обычно того же сорта, что и стенки бассейна. Например, лента может накладываться вдоль шва между двумя листами стенки для закрытия трещины, которая образовалась между листами (из-за износа, коррозии и т.п.). Такое действие обычно предпринимается в бассейне, заполненном водой, которая может быть загрязнена радиацией от отработавшего ядерного топлива, которое она содержит. Неприемлемо использовать водолаза для герметизации щели. Для наложения на трещину самоклеящейся ленты упомянутого выше типа после предварительной фазы обнаружения и локализации дефекта или трещины можно использовать робот.
Дело можно организовать таким образом, что мобильный робот, оснащенный шарнирно-сочлененной рукой для достижения трещин, располагающихся высоко на вертикальных стенках бассейна, будет находиться на дне бассейна. Такие бассейны глубоки, при этом их глубина типично достигает 14 метров. Даже небольшая угловая ошибка может приводить к недопустимым погрешностям позиционирования при наложении ленты на трещину. В частности, желательны очень небольшие допуски на погрешность позиционирования. Лента имеет ширину приблизительно 40 мм, а сварной шов, трещину в котором необходимо закрыть, может иметь ширину приблизительно 6 мм. Кроме того, требуемый допуск на погрешность позиционирования ленты соответствует 15 мм клейкого вещества за пределами сварного шва, оставляя 2 мм на погрешность позиционирования центра ленты относительно центра сварного шва. Таким образом, допуск на погрешность позиционирования составляет 2 мм при длине шарнирно-сочлененной руки 14 м. Требуемая угловая точность составляет 0,008 градусов, что трудно, если вообще возможно обеспечить на практике (в частности, из-за присущей шарнирно-сочлененной руке механической гибкости).
Настоящее изобретение позволяет исправить ситуацию.
С этой целью в изобретении предлагается способ герметизации шва в стенке бассейна атомной электростанции (такой шов может иметь, а может и не иметь трещины). В частности, данный способ основан на использовании мобильного робота, оснащенного размотчиком самоклеящейся ленты, покрытой защитным материалом (например, нержавеющей сталью). Способ предусматривает выполнение по меньшей мере следующих этапов:
- управление множеством отсасывающих систем, причем размотчик механически интегрирован с первой отсасывающей системой, и
- этап управления перемещением первой системы относительно других систем упомянутого множества отсасывающих систем.
Таким образом, множество отсасывающих систем обеспечивает удержание робота на вертикальной стенке бассейна, например, путем создания разряжения в чашечных присосках, а первая отсасывающая система, к которой крепится размотчик, может перемещаться относительно других чашечных присосок для настройки положения размотчика и тем самым ленты относительно трещины или, в более общем смысле, относительно шва, который необходимо герметизировать.
Вследствие этого становится возможным непрерывно разматывать ленту на большую длину. Кроме того, возможно закрытие всего шва, например шва между двумя листами (обычно на все упомянутые выше 14 метров дины), т.к. такой шов может иметь трещины, при этом не заботясь об их реальном наличии и точном местоположении.
Более того, фазы поиска-локализации трещин становятся излишними. Упомянутый поиск обычно проводится вручную (что порождает проблему защиты оператора от излучения). Кроме всего прочего, поиск остается неточным и ограниченным. Сквозные трещины шириной менее 90 мкм не выявляются. Под термином "сквозная трещина" понимается трещина, проходящая до другой стороны листов, что нарушает их водонепроницаемость.
Данная фаза поиска требует нескольких дней в графике вывода в ремонт, который и без того является очень плотным.
Кроме того, формирование трещины является частью процесса усталостного изменения свойств материала, который не зависит от локальной дозы. Вследствие этого невозможно предсказать места возникновения и количество сквозных трещин.
Настоящее изобретение позволяет преодолеть эти ограничения путем герметизации всех доступных швов, делая фазу поиска-локализации необязательной.
Вышеупомянутый этап управления может осуществляться дистанционно с помощью станции управления, которая, к примеру, получает изображение от камер, установленных на роботе.
В одном из вариантов осуществления изобретения предлагается рама, оснащенная одной или несколькими отсасывающими системами, а также поперечный элемент, установленный на раме с возможностью перемещения и несущий первую отсасывающую систему и размотчик.
В данном варианте осуществления изобретения поперечный элемент может перемещаться посредством смещения вдоль первого направления рамы.
В данном варианте осуществления изобретения поперечный элемент может нести на себе манипулятор, механически интегрированный с размотчиком, и этот манипулятор может быть установлен с возможностью перемещения посредством смещения относительно поперечного элемента по меньшей мере во втором направлении, отличающемся от первого направления перемещения. Такая реализация обеспечивает, к примеру, перемещение в плоскости, параллельной герметизируемой стенке, в упомянутых двух направлениях, определяющих данную плоскость. Конечно, этот манипулятор может также иметь вертикальный вал для настройки высоты расположения головки размотчика и тем самым прижимания намотанной на него ленты к герметизируемому шву.
В одном из вариантов осуществления изобретения размотчик может размещаться вне пределов рамы, что обеспечивает досягаемость для размотчика труднодоступных участков (участков, загроможденных фильтрационным, осветительным или лестничным оборудованием) или, в более общем смысле, участков с неровными контурами, к примеру, если листы сварены угловыми швами. С этой целью предпочтительна сама структура ленты, обладающая необходимой гибкостью для такого нанесения и содержащая покрытый пленкой из нержавеющей стали эластомер.
В одном из общих вариантов осуществления изобретения первая отсасывающая система может быть установлена с возможностью вращения относительно других отсасывающих систем, что позволяет изменять направление перемещения робота или, к примеру, точно выдерживать путь над швом в стенке.
В еще одном варианте осуществления изобретения для перемещения размотчика относительно стенки бассейна требуются сменяющие друг друга этапы, подразумевающие по меньшей мере следующие действия:
- активацию отсасывающих систем с деактивацией первой отсасывающей системы;
- перемещение первой отсасывающей системы относительно других отсасывающих систем в заданном направлении;
- активацию первой отсасывающей системы с деактивацией других отсасывающих систем;
- перемещение первой отсасывающей системы относительно других отсасывающих систем в направлении, противоположном заданному направлению.
В еще одном варианте осуществления изобретения отсасывающие системы содержат чашечные присоски с противотоком текучей среды, управляемые, к примеру, дистанционно. Такой вариант осуществления изобретения позволяет, к примеру, управлять быстрым перемещением размотчика относительно стенки бассейна.
В еще одном варианте осуществления изобретения размотчик имеет головку, которая прижимает ленту к стенке, при этом упомянутая головка может оснащаться сервоприводом. Такой вариант осуществления изобретения позволяет, к примеру, обеспечивать оптимальный прижим во время приклеивания ленты. В качестве альтернативы можно обернуть ленту вокруг ролика, разделенного на две части и установленного на двух пружинах на конце головки размотчика, как это описано ниже со ссылкой на фиг. 3. В виду того, что лента гибкая, она может следовать контуру края или неровной поверхности.
Настоящее изобретение также относится к роботу, включающему в себя рассмотренные выше средства реализации изобретения, в частности к мобильному роботу для герметизации трещин в стенке бассейна для отработавшего топлива, несущему размотчик с самоклеящейся лентой и содержащему:
- множество отсасывающих систем, размотчик, механически интегрированный с первой отсасывающей системой, и
- средство перемещения для перемещения первой системы относительно других систем упомянутого множества отсасывающих систем.
Следует отметить, что упомянутый робот может адаптироваться для работы на открытом воздухе для ремонта любых швов (между любыми облицовками), тем самым делая излишними не только фазы поиска и определения местоположения, но и возведение строительных лесов (например, для проведения работ по техническому обслуживанию уплотнения внутренней металлической футеровки бетонных стен, к примеру, здания реактора).
Настоящее изобретение также относится к системе, содержащей такой робот и средство дистанционного управления отсасывающими системами и имеющимся в роботе приводом.
Понятно, что робот со своей системой перемещения по вертикальным стенкам бассейна с помощью отсасывающих систем может быть автономным на месте работ, несмотря на то, что может дистанционно управляться станцией управления устройства в контексте изобретения. Однако перемещение робота может очень точно контролироваться и в целом позволяет обеспечивать экстремально точное позиционирование головки размотчика относительно трещины, или в целом относительно шва, который необходимо герметизировать. Более того, в одном из предпочтительных вариантов осуществления изобретения для исключения смещения вследствие большой длины наложения ленты робот может оснащаться системой повторной юстировки во время наложения ленты без ее повреждения. Такая повторная юстировка выполняется путем точного позиционирования робота благодаря тому, что приращение позиционирующего двигателя предпочтительно составляет 0,01° при вращении и 0,25 мм при последовательном перемещении.
Другие отличительные признаки и преимущества настоящего изобретения очевидны из рассмотрения приведенных ниже типичных не ограничивающих объем изобретения вариантов его осуществления и прилагаемых к описанию чертежей, на которых показано:
Фиг. 1 - схематичный вид бассейна, имеющего трещину, которую необходимо закрыть клейкой герметизирующей лентой;
Фиг. 2 - схематичный вид сечения такой ленты;
Фиг. 3 - вид размотчика ленты;
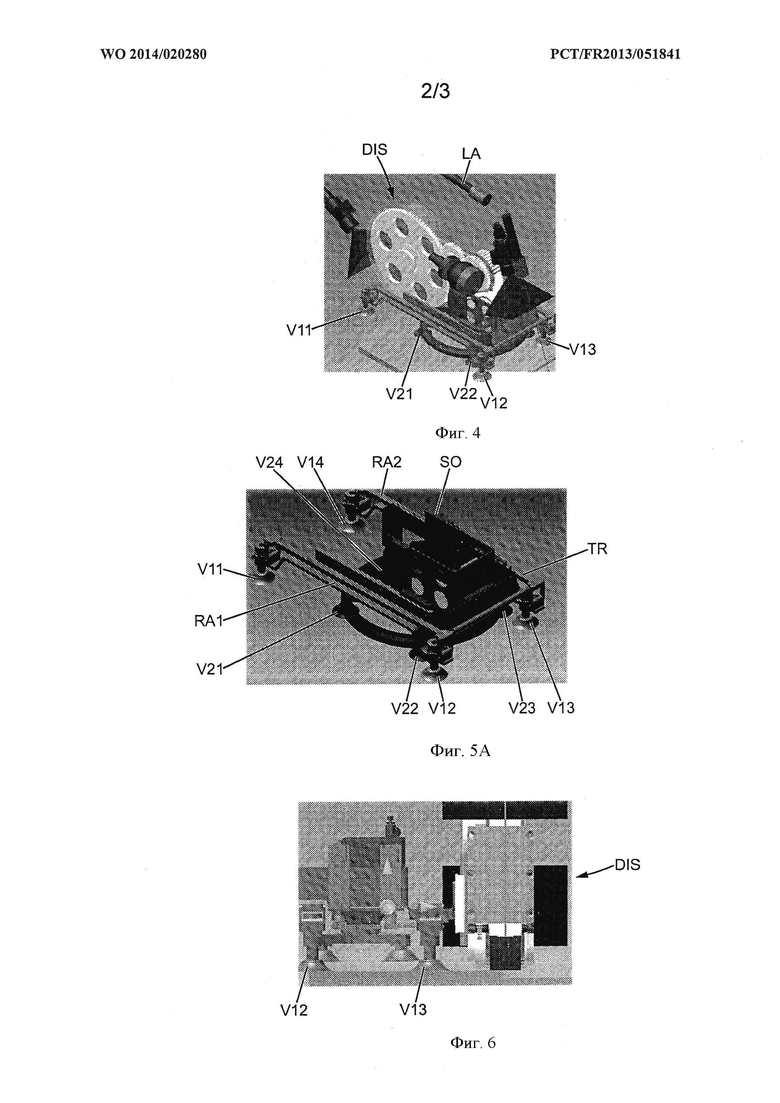
Фиг. 4 - размотчик ленты, установленный на платформе, интегрировано со средством перемещения размотчика, причем средство перемещения на основе системы чашечных присосок;
Фиг. 5A - отдельный вид средства перемещения размотчика, использующего упомянутую систему чашечных присосок;
Фиг. 5B - схематичный вид различных степеней свободы такого средства перемещения;
Фиг. 5C - различные этапы способа перемещения с использованием показанного на Фиг. 5A средства перемещения;
Фиг. 6 - альтернативный вариант осуществления изобретения, в котором размотчик вынесен за пределы механической рамы, несущей систему чашечных присосок.
Для пояснения одного из возможных предпочтительных вариантов использования робота в контексте настоящего изобретения обратимся к Фиг. 1. Здесь в бассейне атомной электростанции (обозначенном ссылочной позицией PI), предназначенном, к примеру, для хранения отработавшего ядерного топлива, образовалась трещина FI. Обычно между стальными стенками бассейна выполняется сварной шов, к примеру, между листами VO нержавеющей стали. В примере, приведенном на Фиг. 1, такие листы представляют собой стальные пластины, установленные на внутренних стенках бассейна.
В целом отмечено, что по мере старения, если трещина появляется, то она начинается от этого сварного шва. Обычно трещину закрывают клейкой лентой BS, часто непрерывной, имеющей вид показанной на Фиг. 2 полосы. Лента, в частности, содержит клейкий полимер EL (к примеру, эластомер), покрытый защитной пленкой IN, к примеру, из нержавеющей стали. Предпочтительно такая структура ленты обладает большой гибкостью, особенно при наложении на края или неровные поверхности, как это было рассмотрено выше.
Из Фиг. 3 видно, что клейкая лента BS обмотана вокруг роликов RO, поддерживающих ленту BS, которая приводится в движение механизмом ME, состоящим из зубчатого венца и зубчатого ведущего колеса, имеющихся в размотчике DIS. В частности, может оказаться предпочтительным использовать по меньшей мере два полуролика RO, смонтированных на отдельных пружинах в головной части размотчика, чтобы позволить наложение ленты на острый край или на две поверхности, если между ними имеется разница по высоте. Имея два независящих друг от друга полуролика, головка может отрабатывать вариации контура в процессе наложения ленты.
Дополнительно или в более сложном варианте выполнения головка размотчика может оснащаться сервоприводом, который изменяет высоту головки в зависимости от сопротивления, которое может встретиться при перемещении по конкретному контуру.
Следует понимать, что головка размотчика может проникать в труднодоступные места бассейна, к примеру под трубы, по которым протекает текучая среда, или под ступеньки лестницы и т.п.
В частности, в контексте настоящего изобретения клейкая лента имеет относительно небольшую толщину (несколько миллиметров) и вследствие этого является гибкой. Поэтому удается наклеивать ленту в вышеупомянутых условиях (труднодоступных местах, на острых краях и т.п.) и делать это на протяженных участках.
Дополнительно робот может перемещаться по вертикальной стенке бассейна, и это может выполняться с очень высокой точностью позиционирования головки размотчика относительно заданной точки на стенке, лента может накладываться вдоль очень длинного сварного шва. Такой вариант осуществления изобретения сокращает время проведения ремонта бассейна с отработавшим топливом за счет исключения фазы поиска дефектов, включая поиск сквозных трещин. В настоящее время ремонт бассейна для выдержки отработавшего топлива требует предварительной фазы поиска. Только после выявления дефектов они могут быть герметизированы. В общем, дефекты выявляются способом измерения полей переменного тока: электрический ток подается помощью зонда вдоль шва, последующий анализ созданного магнитного поля выдает размеры и положение сквозных трещин (трещин, проходящих через всю толщину листа). Показанный на Фиг. 3 вариант осуществления изобретения исключает упомянутую фазу поиска, т.к. он предполагает нанесение ремонтной ленты на большую длину, что возможно благодаря экстремально тонкой ленте и автоматизации процесса ее наложения, которая, таким образом, покрывает всю длину сварных швов, исключая необходимость выявления наличия в данном месте сквозных трещин. Если покрывать таким материалом все доступные сварные швы, то фаза поиска дефектов становится излишней. На практике срок службы ленты может определять график обслуживания стенок бассейна. Например, срок службы ленты может составлять порядок десяти лет, т.е. обслуживание может проводиться каждые десять лет.
Предпочтительно на размотчике DIS устанавливаются фронтальная камера C1 и тыльная камера C2 для контроля его перемещения со станции дистанционного управления (на Фиг. 3 обозначена ссылочной позицией PC) и приближения головки размотчика к герметизируемой щели или, в более общем смысле, к закрываемому шву. Кроме того, имеются источники лазерного излучения (обозначенные на Фиг. 4 ссылочной позицией LA) для оптимальной окончательной настройки положения головки относительно шва.
Из Фиг. 4 видно, что размотчик DIS устанавливается на платформе (обозначенной на Фиг. 5A ссылочной позицией SO), причем упомянутая платформа механически интегрирована с системой перемещения с чашечными присосками V11, V12, V13, V21, V22. Данная система перемещения лучше видна на Фиг. 5A, на которой платформа SO механически интегрирована с поперечным элементом TR, несущим первый комплект чашечных присосок V21, V22, V23, V24. Упомянутый поперечный элемент TR может скользить между двумя рельсовыми направляющими RA1 и RA2, при этом сами рельсовые направляющие несут второй комплект чашечных присосок V11, V12, V13 и V14. Чашечные присоски первого или второго комплекта имеют характеристики, управляемые персональным компьютером PC станции управления, который может активировать отсасывание ими воды с поверхности, чтобы создать эффект "чашечного присоса", или может деактивировать их, чтобы они отсоединились от упомянутой поверхности.
Далее со ссылкой на Фиг. 5B приводится описание возможных перемещений одной системы чашечных присосок относительно другой. В показанном примере первая система чашечных присосок V21-V24 крепится к валу Tz1', выполненному с возможностью перемещения путем смещения (по высоте). В показанном варианте осуществления изобретения к этому валу крепится размотчик DIS (соединение обозначено пунктирной линией). Кроме того, вал Tz1' интегрирован с поперечным элементом TR с возможностью продольного перемещения путем продольного смещения вдоль оси Ту. Сам размотчик может продольно перемещаться вдоль оси Тх и по высоте вдоль своей собственной оси Tz. Вал Tz1' может дополнительно перемещаться путем вращения RZ с целью угловой ориентации первой системы чашечных присосок относительно второй системы чашечных присосок. Дополнительно вторая система чашечных присосок V11-V14 в одном из технически сложных вариантов осуществления изобретения, который ни в коей мере не является обязательным, может перемещаться путем смещения по высоте вдоль вала Tz'2.
Далее со ссылкой на Фиг. 5С приводится описание механизма перемещения и порядка использования системы, подобной показанной на Фиг. 5В.
На первом этапе S1 первая система чашечных присосок опускается вниз посредством смещения вдоль вала Tz'1. Одновременно на этапе S2 активируется первая система чашечных присосок V21-V24, а вслед за этим деактивируется вторая система чашечных присосок V11-V14. Далее чашечные присоски V21-V24 присасываются к поверхности стенки (к примеру, к вертикальной стенке) бассейна, в то время как вторая система чашечных присосок V11-V14 отсоединяется от упомянутой поверхности. На этапе S3 дается команда на смещение вдоль оси Ту, чтобы "продвинуть" систему чашечных присосок V11-V14 относительно первой системы чашечных присосок V21-V24, а также относительно стенки бассейна, т.к. первая система зафиксирована на стенке бассейна. Затем на этапе S4 осуществляется обратный порядок выполнения этапов S1 и S2: вторая система чашечных присосок V11-V14 опускается на этапе S4, и активируются чашечные присоски V11-V14, в то время как первая система чашечных присосок V21-V24 деактивируется. Следует понимать, что в целом робот перемещается посредством осуществляемого на этапе S3 смещения вдоль оси Ту; остается только привести на этапе S6 первую систему чашечных присосок V21-V24 в первоначальное положение, что даст возможность наибольшей амплитуды для последующего смещения, выполняемого на последующей итерации этапа S3.
Перемещение мобильного робота с целью приближения ко шву может контролироваться дистанционно с использованием установленных на роботе (контроль Т7) камер. Перемещение робота продолжается (стрелка КО осуществляемого контроля Т7) до тех пор, пока он не приблизится на требуемое расстояние до шва (стрелка ОК осуществляемого контроля Т7). Когда робот подойдет достаточно близко, то на этапе S8 производится настройка углового положения размотчика DIS путем вращения Rz, а точного положения размотчика DIS в плоскости стенки бассейна посредством смещения вдоль осей Tx и Ty, чтобы расположить размотчик вдоль оси шва. Далее, на этапе S9, раз уж головка размотчика располагается над швом, размотчик может быть опущен вниз посредством смещения вдоль оси Tz, чтобы с усилием прижать накладываемую ленту ко шву. Затем робот может перемещаться (посредством смещения вдоль оси Ty), а размотчик может изменять свое угловое положение посредством вращения Rz и перемещаться в плоскости Tx, Ty стенки бассейна (и при необходимости по высоте Tz), как это описано выше при осуществлении этапов S1-S6.
Более того, чашечные присоски отсасывающей системы робота могут выполняться, к примеру, в виде плунжера, установленного в цилиндре и пригодного для отсоса воды из одной или нескольких следующих одна за другой полостей, обеспечивающего точно настраиваемое прилипание чашечной присоски. Как указано выше, свобода смешения Tz по высоте каждой чашечной присоски предпочтительно обеспечивает стабильность положения робота в плоскости, если на стенке встречаются вышеупомянутые неровности.
Таким образом, можно первоначально разместить робот на боковой кромке бассейна (обычно у поверхности находящейся в нем жидкости) и затем направить его ко шву, причем робот присасывается к стенке и перемещается относительно стенки, пока не достигнет шва.
В данном документе описан вариант осуществления изобретения, в котором размотчик DIS интегрирован с валом Tz1', несущим первую систему чашечных присосок V21-V24. Возможны также другие варианты. Например, размотчик может быть интегрирован не с этим валом, а скорее с валом, параллельным оси продольного смещения Tx (см. Фиг. 5B, без учета соединения, показанного пунктирной линией). Такой вариант осуществления изобретения обеспечивает перемещение подобно описанному со ссылкой на Фиг. 5C, но позволяет размотчику смещаться вбок за пределы зоны, определяемой рельсовыми направляющими RA1 и RA2. Такой вариант показан на Фиг. 6: размотчик находится вне рамы, оснащенной чашечными присосками V11 V14, что обеспечивает непосредственный доступ к трещине без мешающего влияния рельсовых направляющих RA1 и RA2.
В общем, настоящее изобретение естественно не ограничивается описанными выше примерными вариантами его осуществления, но охватывает и другие варианты.
Таким образом, следует понимать, что в самом простом варианте осуществления изобретения общая система перемещения робота может базироваться по меньшей мере на двух отсасывающих устройствах. Действительно, достаточно одному отсасывающему устройству перемещаться посредством смещения относительно другого отсасывающего устройства, чтобы вызвать перемещение предлагаемого в изобретении мобильного робота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс для ремонта облицовки бассейна выдержки | 2020 |
|
RU2751997C1 |
| УПАКОВОЧНОЕ УСТРОЙСТВО И СИСТЕМА СОРТИРОВКИ ДЛЯ НАПРАВЛЕННОГО УПАКОВЫВАНИЯ ПРОДУКТОВ И СПОСОБ УПАКОВЫВАНИЯ | 2017 |
|
RU2721093C2 |
| Устройство для сортировки движущихся компонентов | 2019 |
|
RU2811480C2 |
| АППАРАТ ДЛЯ ЧИСТКИ ЕМКОСТИ И СПОСОБ ОСУЩЕСТВЛЕНИЯ ЧИСТКИ | 2017 |
|
RU2736952C2 |
| УСТРОЙСТВО ДЛЯ РЕМОНТА ПОВРЕЖДЕННОГО МЕСТА НА РАСПОЛОЖЕННОМ ПОД ВОДОЙ УЧАСТКЕ СТЕНКИ РЕЗЕРВУАРА ИЛИ БАССЕЙНА | 2009 |
|
RU2438199C1 |
| УСТРОЙСТВО ДЛЯ РЕМОНТА ОБЛИЦОВКИ БАССЕЙНА ВЫДЕРЖКИ | 2017 |
|
RU2661335C1 |
| УСТРОЙСТВО И СПОСОБ ИЗГОТОВЛЕНИЯ ЛОПАСТИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА (ВАРИАНТЫ) | 1995 |
|
RU2132288C1 |
| СПОСОБ ЛАЗЕРНОЙ РЕЗКИ ХРУПКИХ НЕМЕТАЛЛИЧЕСКИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2528287C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЛИСТОВОГО СТЕКЛА | 2016 |
|
RU2686772C1 |
| Система для ремонта облицовки бассейна выдержки | 2020 |
|
RU2751544C1 |


Изобретение относится к герметизации трещины в стенке бассейна атомной электростанции, а именно способу герметизации шва и мобильному роботу, оснащенному размотчиком клейкой ленты, который содержит головку, прижимающую клейкую ленту к стенке. Для осуществления герметизации шва управляют множеством отсасывающих систем робота, содержащих присоски, причем указанное множество отсасывающих систем содержит первую отсасывающую систему и по меньшей мере вторую отсасывающую систему. При этом размотчик механически интегрирован с первой отсасывающей системой, выполненной с возможностью перемещения относительно второй отсасывающей системы для регулирования положения головки размотчика и клейкой ленты, которую наносят на шов. И управляют перемещением первой отсасывающей системы относительно второй отсасывающей системы. При этом клейкую ленту размотчика наносят на шов при перемещении первой отсасывающей системы относительно второй отсасывающей системы. Изобретение позволяет наклеивать ленту в труднодоступных местах, на острых краях и при этом на протяженных участках. 3 н. и 11 з.п. ф-лы, 8 ил.
1. Способ герметизации шва (FI) в стенке бассейна (PI) атомной электростанции с использованием мобильного робота, оснащенного размотчиком (DIS) клейкой ленты (BS), который содержит головку, прижимающую клейкую ленту к стенке, включающий по меньшей мере этапы, на которых:
управляют (PC) множеством отсасывающих систем мобильного робота, содержащих присоски (V11-V14; V21-V24), причем указанное множество отсасывающих систем включает в себя первую отсасывающую систему (V21-V24) и по меньшей мере вторую отсасывающую систему (V11-V14), при этом размотчик механически интегрирован с первой отсасывающей системой (V21-V24), указанная первая отсасывающая система (V21-V24) выполнена с возможностью перемещения относительно второй отсасывающей системы (V11-V14) для того, чтобы регулировать положение головки размотчика и клейкой ленты, которая наносится на шов, и
управляют перемещением (Ту) указанной первой отсасывающей системы (V21-V24) относительно указанной второй отсасывающей системы (V11-V14) указанного множества отсасывающих систем, при этом клейкая лента размотчика наносится на шов при перемещении первой отсасывающей системы относительно второй отсасывающей системы.
2. Способ по п. 1, в котором используют раму (RA1, RA2), содержащую вторую отсасывающую систему (V11-V14), и поперечный элемент (TR), подвижно установленный на раме и поддерживающий первую отсасывающую систему (V21-V24) и размотчик (DIS).
3. Способ по п. 2, в котором поперечный элемент выполнен с возможностью перемещения вдоль первого направления (Ту) рамы.
4. Способ по п. 3, в котором поперечный элемент поддерживает манипулятор (Тх), механически интегрированный с размотчиком, и указанный манипулятор смонтирован с возможностью перемещения относительно поперечного элемента (TR) по меньшей мере во втором направлении (Тх, Tz), отличающемся от первого направления.
5. Способ по п. 2, в котором размотчик установлен относительно рамы таким образом, что он оказывается вне пределов рамы.
6. Способ по п. 1, в котором первая отсасывающая система (V21-V24) смонтирована с возможностью вращения (Rx) относительно второй отсасывающей системы (V11-V14) указанного множества отсасывающих систем.
7. Способ по п. 1, в котором для перемещения размотчика относительно стенки бассейна выполняют сменяющие друг друга этапы, включающие в себя по меньшей мере этапы, на которых:
включают (S5) отсасывающие системы указанного множества отсасывающих систем, причем выключают первую отсасывающую систему;
перемещают (S6) первую отсасывающую систему относительно второй отсасывающей системы в заданном направлении;
включают (S2) первую отсасывающую систему и выключают вторую отсасывающую систему;
перемещают (S3) первую отсасывающую систему относительно второй отсасывающей системы в направлении, противоположном указанному заданному направлению.
8. Способ по п. 1, в котором отсасывающие системы указанного множества отсасывающих систем содержат присоски с обратным током текучей среды.
9. Способ по п. 1, в котором размотчик содержит головку, которая прижимает ленту к стенке, причем указанная головка оснащена сервоприводом.
10. Способ по п. 1, в котором клейкая лента покрыта защитной пленкой.
11. Способ по п. 10, в котором защитная пленка выполнена из нержавеющей стали.
12. Способ по п. 1, в котором герметизируемый шов представляет собой сварной шов между листами (VO), покрывающими внутреннюю стенку бассейна, причем в сварном шве, возможно, имеется трещина.
13. Мобильный робот для герметизации шва (FI) в стенке бассейна (PI) атомной электростанции, оснащенный размотчиком (DIS) клейкой ленты (BS), который содержит головку, прижимающую клейкую ленту к стенке, характеризующийся тем, что он содержит:
множество отсасывающих систем, содержащих присоски (V11-V14; V21-V24), причем указанное множество отсасывающих систем включает в себя первую отсасывающую систему (V21-V24) и по меньшей мере вторую отсасывающую систему (V11-V14), причем размотчик механически интегрирован с первой отсасывающей системой, указанная первая отсасывающая система (V21-V24) выполнена с возможностью перемещения относительно второй отсасывающей системы (V11-V14) для того, чтобы регулировать положение головки размотчика и клейкой ленты, которая наносится на шов, и
средство перемещения для перемещения указанной первой отсасывающей системы относительно второй отсасывающей системы (V11-V14) указанного множества отсасывающих систем, при этом клейкая ленка размотчика наносится на шов при перемещении первой отсасывающей системы относительно второй отсасывающей системы.
14. Система для герметизации шва (F1) в стенке бассейна (PI) атомной электростанции, включающая в себя мобильный робот по п. 13 и средство (PC) дистанционного управления отсасывающими системами указанного множества отсасывающих систем и средством перемещения, содержащимися в мобильном роботе.
| FR 2874020 A1, 10.02.2006 | |||
| КЛЮЧ ДЛЯ ТРУБ | 1927 |
|
SU10034A1 |
| DE 29822221 U1, 22.05.2003 | |||
| RU 2010118473 A, 20.11.2011. | |||

