Предпосылки к созданию изобретения
Настоящее изобретение имеет отношение к установкам, которые используют при проведении работ на нефтяной скважине. Несмотря на то, что в первую очередь настоящее изобретение имеет отношение к установкам для технического обслуживания и капитального ремонта уже существующих нефтяных скважин, настоящее изобретение может быть адаптировано для использования с установками для бурения новых нефтяных скважин.
В то время, как операцию бурения нефтяной скважины осуществляют автоматически при помощи установки для бурения, имеются операции, связанные с бурением нефтяной скважины или с обслуживанием нефтяной скважины, которые требуют больших трудозатрат и связаны с большой потерей времени. В случае установки для бурения часто необходимо производить подъем (вытягивание) бурильной колонны из скважины, чтобы заменить буровую коронку, после чего необходимо вновь опустить бурильную колонну в скважину. После того, как при помощи установки для бурения пробурена нефтяная скважина, и установлена обсадная колонна скважины, установку разбирают и увозят с буровой площадки. С этого момента для обслуживания скважины обычно используют подвижный ремонтный блок или подвижную установку для подземного ремонта скважин. Обслуживание скважины включает в себя, например, установку (введение) и извлечение (вытаскивание, подъем) внутренних колонн труб, насосных штанг и насосов. Часто необходимо вытаскивать эксплуатационную колонну для проведения обслуживания скважины или скважинного оборудования. В любом случае это приводит к проведению длинного ряда повторяющихся операций, в которых плети труб вытаскивают из скважины (по одной или по две, или три одновременно), разъединяют из резьбовые концы и хранят во время подъема последующих плетей. Этот процесс повторяют в обратном порядке, когда отрезки трубы соединяют вместе и вводят один за другим, чтобы опустить бурильную колонну или эксплуатационную колонну в скважину. Это обычно делают с использованием системы канатного подъемника, которая содержит талевый блок, который поднимает и опускает упомянутые здесь выше колонны насосно-компрессорных труб, насосные штанги и насосы.
Ясно, что при подключении отрезков (плетей) трубы чем больше отрезков трубы вводят в скважину, тем тяжелее становится колонна труб. Это приводит к повышению нагрузки, приложенной к обычным тормозным барабанам системы канатного подъемника, что иногда приводит к выходу из строя тормоза или к снижению эффективности тормоза за счет нагрева при опускании колонны труб в скважину. Установочный (компьютерный) диск позволяет на установках для обслуживания скважин получать с тормозов необходимые сигналы управления и сигналы тревоги (тревожной сигнализации). Так как указанный диск упрощает установку тормозов на модернизированных установках, уже разработаны алгоритмы для управления скоростью во всем диапазоне перемещения блока вниз, однако в настоящее время эти алгоритмы все еще не внедрены в практику. Так как обычные тормозные барабаны являются автономными, их трудно использовать для того, чтобы точно контролировать скорости перемещения блока вниз.
Теплота является злейшим врагом тормоза. По мере того, как нагрузки на крюке становятся тяжелее и блоки движутся быстрее, следует прикладывать большее тормозное действие, чтобы управлять блоками и производить их останов. Останов тяжело нагруженных блоков из положения быстрого движения вниз генерирует энергию, которая в конечном счете рассеивается в виде теплоты. Горячие тормоза создают проблему контроля, вызванную частично растяжением (за счет нагревания) тормозных лент и потерей круглоты барабанов. Распыление воды на тормозных лентах представляет собой одно из решений, которое применяют на практике. В этом случае установка имеет систему сопел для распыления воды на тормозных лентах для их охлаждения, однако эта система также имеет свои проблемы. Теплота и вода в совокупности могут вызывать коррозию, что может приводить к выходу из строя компонентов и к отказу тормоза. Поэтому при проведении бурения и обслуживания скважин стараются избежать чрезмерного нагревания тормозов.
Уже предложено использовать гидродинамический или водяной тормоз. Гидродинамический тормоз обычно представляет собой ничто иное как водяной насос, соединенный с трубным барабаном. Когда нагрузка на крюке становится высокой, гидродинамический тормоз должен входить в зацепление, чтобы замедлить движение и управлять скоростью. Когда тормоз входит в зацепление, тогда энергия падающих блоков и нагрузки на крюке рассеивается за счет накачки насосом воды, что снижает нагрев тормоза трубного барабана. Однако несмотря на то, что система гидродинамического тормоза позволяет снизить износ обычного тормоза, ее следует использовать эффективно. Одним из недостатков гидродинамического тормоза является замедление скорости перемещения блока. Когда энергия движущегося вниз блока передается тормозу, тогда установка прекращает свободное падение и поэтому испытывает замедление. Поэтому оператор или бурильщик не вводит в зацепление гидродинамический тормоз до тех пор, пока это не станет необходимо или когда это предписано стандартными рабочими процедурами. Если он спешит произвести спуск колонны в скважину, то существует вероятность ввода в зацепление тормоза с задержкой. Часто оператор или бурильщик вообще не включает тормоз, и поэтому желательно создать автоматизированную систему, которая будет автоматически включать гидродинамический тормоз, когда это необходимо.
Краткое изложение изобретения
В соответствии с настоящим изобретением предлагается автоматическая система для ввода в зацепление гидродинамического тормоза на установке для бурения или на установке для обслуживания скважины. Эта система производит текущий контроль как нагрузки на крюке, так и скорости перемещения блока и использует электромагнитный клапан (электрический соленоид) для приведения в действие гидродинамического тормоза, когда нагрузка на крюке или скорость вращения барабана превышает максимальное значение, требующее ввода в зацепление гидродинамического тормоза.
Краткое описание чертежей
На фиг.1 показан первый вариант установки для обслуживания скважин.
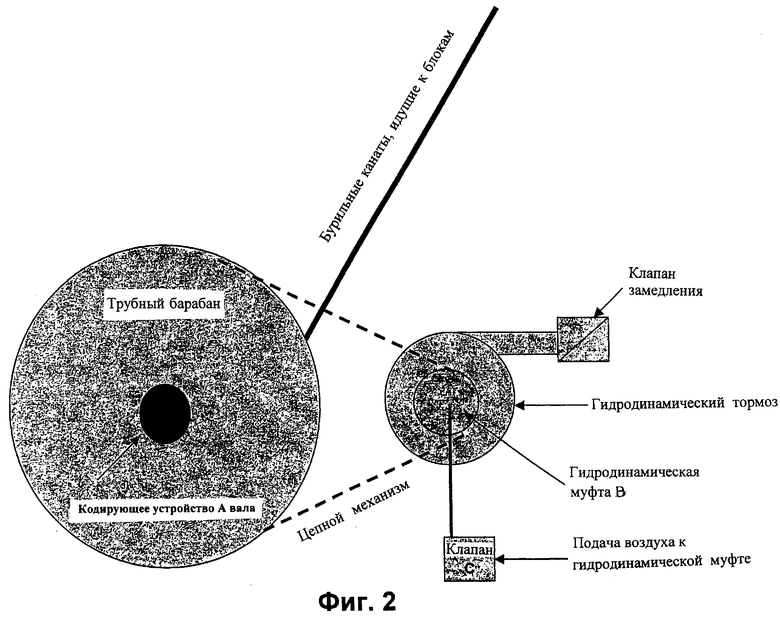
На фиг.2 показан гидродинамический тормоз.
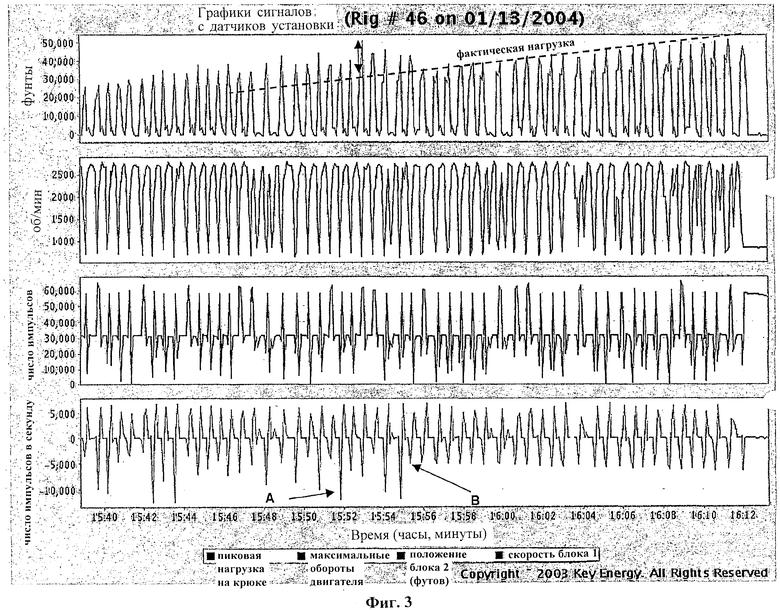
На фиг.3 показаны фактические нагрузка на крюке и скорость перемещения блока, иллюстрирующие необходимость использования настоящего изобретения и результат такого использования.
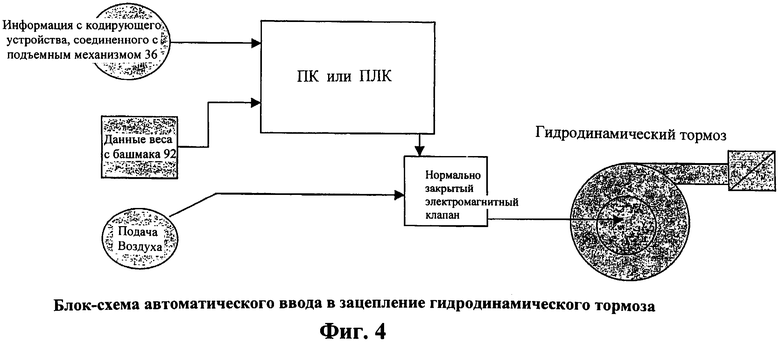
На фиг.4 показана блок-схема одного из вариантов осуществления настоящего изобретения.
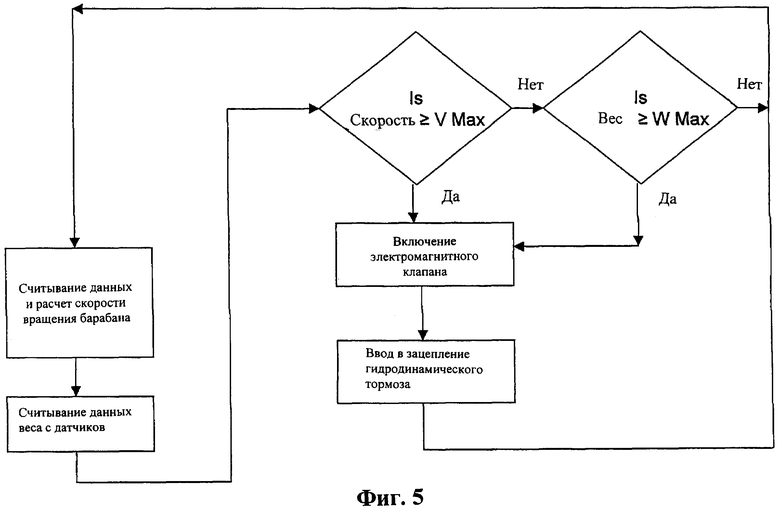
На фиг.5 показана логическая схема одного из вариантов осуществления настоящего изобретения.
Подробное описание изобретения
Обратимся теперь к рассмотрению фиг.1, на которой показана выдвижная автономная установка 20 для подземного ремонта скважин, которая содержит раму 22 тележки, поддерживаемую колесами 24, двигатель 26, гидравлический насос 28, воздушный компрессор 30, первую трансмиссию 32, вторую трансмиссию 34, подъемный механизм 36 переменной скорости, блок 38, расширяемый (удлиняемый) деррик-кран 40, первый гидравлический цилиндр 42, второй гидравлический цилиндр 44, монитор 48 и втяжные стойки 50. Двигатель 26 избирательно подключается к колесам 24 и к подъемному механизму 36 при помощи трансмиссий 34 и 32, соответственно. Двигатель 26 также приводит в действие гидравлический насос 28 через магистраль 29, а также воздушный компрессор 30 через магистраль 31. Компрессор 30 приводит в действие пневматический слип (не показан), а насос 28 приводит в действие набор гидравлических ключей для труб (не показан). Насос 28 также приводит в действие цилиндры 42 и 44, которые удлиняются соответствующим образом и поворачивают деррик-кран 40 так, чтобы избирательно устанавливать деррик-кран 40 в рабочее положение (фиг.1) и во втянутое положение (не показано). В рабочем положении деррик-кран 40 направлен вверх, но его продольная центральная линия (ось) 54 смещена от вертикали на угол 56. Это угловое смещение 56 позволяет блоку 38 иметь доступ в ствол скважины 58 без помех со стороны каркаса деррик-крана и позволяет производить быструю установку и извлечение внутренних трубных сегментов, таких как внутренние колонны труб 62 и/или насосные штанги.
При установке внутренних трубных сегментов индивидуальные трубные сегменты свинчивают вместе с использованием гидравлического ключа для труб (не показан). Гидравлические ключи для труб известны сами по себе, причем этот термин относится к любому гидравлическому инструменту, который позволяет свинчивать вместе две трубы или насосные штанги. Во время операций комплектования блок 38 поддерживает каждый трубный сегмент, в то время как его ввинчивают во введенную в скважину колонну труб. После этого соединения блок 38 поддерживает всю колонну трубных сегментов таким образом, что новый трубный сегмент может быть опущен в скважину. После опускания всю колонну закрепляют, а блок 38 выбирает другой трубный сегмент для соединения со всей колонной. Наоборот, во время операций извлечения блок 38 поднимает всю колонну трубных сегментов из скважины, пока по меньшей мере один индивидуальный сегмент не выйдет на поверхность земли. Колонну закрепляют, и затем блок 38 поддерживает трубный сегмент во время его отсоединения от колонны. Блок 38 затем перемещает индивидуальный трубный сегмент в резервное положение и возвращается для подъема колонны, так чтобы другие индивидуальные трубные сегменты могли быть отделены от колонны.
Обратимся вновь к рассмотрению фиг.1, на которой показано, что вес, приложенный к блоку 38, измеряют, например, при помощи гидравлического башмака 92, который поддерживает вес деррик-крана 40. Обычно гидравлическим башмаком 92 является поршень в цилиндре, но это может быть и диафрагма. Гидравлическое давление в башмаке 92 возрастает при увеличении веса груза на блоке 38, и это давление можно контролировать для оценки веса груза на блоке. Для определения веса груза на блоке могут быть использованы и другие типы датчиков, в том числе канатные индикаторы (индикаторы натяжения бурильных канатов - прим. переводчика), прикрепленные к неподвижному концу талевого каната подъемного механизма, датчики деформации, которые измеряют любые приложенные к деррик-крану силы сжатия, или динамометрические элементы, установленные в разных положениях на деррик-кране или на наголовнике (кронблоке). В то время, как вес груза на блоке может быть измерен любым возможным образом, следует иметь в виду, что точное значение измерения не является критическим в соответствии с настоящим изобретением, однако важно, чтобы вес груза на блоке был измерен.
Подъемный механизм 36 управляет движением каната (троса) 37, который выходит из подъемного механизма 36 поверх верхней части блока 55 колеса наголовника (кронблока), расположенного у вершины деррик-крана 40 и поддерживающего передвижной (подвижный) блок 38. Подъемный механизм 36 наматывает и разматывает трос 37, в результате чего передвижной блок 38 перемещается между его верхним положением у блока колеса 55 наголовника и его нижним положением у настила (пола), которым обычно является положение у ствола скважины 58, но это может быть и положение на высоте поднятой платформы, расположенной над стволом скважины 58 (не показано).
Для определения скорости талевого блока необходимо измерить скорость вращения барабана подъемного механизма 36. Это может быть сделано с использованием магнитного записывающего устройства (магнитного датчика) или датчика другого типа с электрическим выходным сигналом, оперативно расположенного в непосредственной близости от вращающейся детали канатного подъемного механизма 36 или блока 55 колеса наголовника и вырабатывающего электрические импульсы, когда указанная деталь вращается. Альтернативно, может быть использован фотоэлемент для выработки необходимых электрических импульсов. Эти электрические импульсы посылают на электронное оборудование, которое может подсчитать число электрических импульсов в единицу времени. Если используют устройство 4-20 для определения положения блока, то необходимо определять скорость изменения тока в единицу времени, чтобы определить скорость блока, причем ток представляет собой выходной сигнал кодирующего устройства 4-20. Для определения скорости в соответствии с настоящим изобретением могут быть использованы и другие устройства, такие как импульсный датчик положения, оптический датчик положения или другие известные подходящие устройства. Если используют импульсную систему, например такую, в которой применяют импульсный датчик положения или оптический датчик положения, то скорость может быть определена за счет подсчета числа импульсов в единицу времени. В соответствии с настоящим изобретением не столь важно, какие средства используют для определения скорости барабана, однако важно, что положение блока измерено и известно.
Обратимся теперь к рассмотрению фиг.2, на которой показан гидродинамический тормоз. Гидродинамический тормоз на установках для бурения или для технического обслуживания и капитального ремонта обычно представляет собой ничто иное, как центробежный водяной насос. Этим насосом может быть одноступенчатый насос для небольшой установки или многоступенчатый насос для более крупных установок, работающих с тяжелыми нагрузками на крюке. На установке имеется большой водяной бак, причем тормоз всасывает воду из этого бака, а вода с выхода насоса поступает назад в этот бак. Этот тормоз непосредственно связан с трубным барабаном через цепной механизм и муфту. Когда гидродинамическая муфта (В) входит в зацепление, тогда тормоз будет вращаться пропорционально вращению трубного барабана. Когда муфта не имеет зацепления, тормоз отключен от системы, и насос не вращается. Общим объемом воды, проходящей через гидродинамический тормоз, управляют как за счет скорости вращения тормоза, так и за счет открывания клапана замедления, расположенного на выходе насоса.
Задачей гидродинамического тормоза является создание механизма рассеяния кинетической энергии, выделяемой при плавной остановке груза на крюке. Это снимает часть задачи тормозного действия с тормозов барабана и передает указанное действие на насос. Гидродинамический тормоз дополнительно создает механизм ограничения скорости движения вниз нагрузки на крюке и блоков, а также создает механизм обеспечения равномерности торможения. Это осуществлено при помощи тормоза, который отбирает постоянную мощность (л.с.) от трубного барабана. Следует иметь в виду, что тормоза установки не являются совершенно круглыми и подвержены износу, что приводит к некоторой изменчивости тормозной способности для любого данного положения ручки тормоза.
Необходимость в гидродинамическом тормозе иллюстрируется фиг.3. Первая кривая представляет собой кривую веса или нагрузки на крюке. Информация относительно веса может поступать от индикатора бурильных канатов или от индикаторов башмака, показанного на фиг.1. Записанный вес является самым большим (пиковым) во время периода выборки. Вторая кривая представляет собой кривую об/мин двигателя. Третья кривая отображает самое высокое положение блока относительно верхней и нижней точек уставки. Ноль представляет собой нижнюю точку уставки поблизости от пола установки, а более высокие показания получают тогда, когда блоки находятся высоко на деррик-кране. Шкалой является число импульсов кодирующего устройства. Наконец, четвертая кривая отображает скорость вращения трубного барабана или скорость перемещения блоков вверх или вниз. В этом случае шкалой является число импульсов в секунду, поступающих от кодирующего устройства. Ориентировочно имеется 392 импульса на один оборот барабана, то есть 3,920 импульсов в секунду, если барабан вращается со скоростью 10 об/сек. Следует иметь в виду, что эта кривая имеет нулевую линию в центре. Положительные числа соответствуют перемещению блоков вверх на деррик-кране, а отрицательные числа соответствуют перемещению блоков вниз и иногда заходящих в скважину.
Задачей любого оператора, проводящего безопасное бурение или обслуживание, является возможно более плавное перемещение установки, так чтобы не подвергать компоненты установки и скважинные инструменты (деррик-кран, подъемный механизм, бурильные канаты, трубы, буровые штанги и бурильную колонну) нагрузкам, превышающим заданные предельные значения. Как это показано на фиг.3, в точке А имеется ориентировочно 18,000 фунтов разности между кажущейся мгновенной нагрузкой на крюке, составляющей 50,000 фунтов, и фактической нагрузкой на крюке, составляющей 32,000 фунтов. Скорость вращения барабана в точке А превышает 30 об/сек (1,800 об/мин), что является чрезмерно высоким для установки. Если скорость барабана может быть ограничена, то могут быть улучшены условия эксплуатации установки.
Проблема, связанная с кажущейся мгновенной нагрузкой на крюке, создает большую опасность для оборудования и риск травматизма. Повышение кажущейся мгновенной нагрузки ориентировочно на 18,000 фунтов возникает за счет усилия, которое необходимо для остановки движущегося объекта. Чем быстрее останов (чем быстрее торможение), тем больше кажущаяся мгновенная нагрузка на крюке установки. Очевидно, что если реальная нагрузка на крюке близка к пределу прочности при растяжении трубы, и установка перемещает и останавливает груз слишком быстро, то тогда может быть превышен предел прочности при растяжении трубы или бурильной колонны. Когда гидродинамический тормоз входит в зацепление в точке В, тогда исключается проблема, связанная с кажущейся мгновенной нагрузкой на крюке, также как и проблема высокой скорости вращения барабана.
Обратимся теперь к рассмотрению фиг.4, на которой показана блок-схема системы для ввода в зацепление гидродинамического тормоза, в которой показания кодирующего устройства (соединенного с подъемным механизмом 36), соответствующие измеренной скорости вращения барабана, и данные о нагрузке на крюке (данные веса с башмака 92) поступают в компьютер, персональный компьютер, программируемый логический контроллер или в другой электронный контроллер. Такие контроллеры хорошо известны сами по себе. Контроллер предварительно запрограммирован на значения максимальной скорости и максимального веса, так что, если показания кодирующего устройства или данные о нагрузке превышают максимальные значения, то контроллер посылает сигнал на электромагнитный клапан. Этот электромагнитный клапан представляет собой нормально закрытый клапан, причем срабатывание электромагнитного клапана позволяет воздуху проходить и приводить в действие гидродинамический тормоз.
Эта концепция дополнительно иллюстрируется фиг.5, на которой показана логическая схема одного из вариантов осуществления настоящего изобретения. Прежде всего определяют скорость вращения барабана, после чего производят определение нагрузки на крюке. Затем определяют, не превышает ли скорость вращения барабана максимальную допустимую скорость вращения. Если это так, то электромагнитный клапан срабатывает и гидродинамический тормоз входит в зацепление. Если это не так, то определяют, не превышает ли нагрузка на крюке заданный верхний предел нагрузки. Если это так, то электромагнитный клапан срабатывает, и гидродинамический тормоз входит в зацепление. Если это не так, то тогда гидродинамический тормоз не входит в зацепление, и система работает нормально.
Гидродинамический тормоз обычно входит в зацепление только тогда, когда талевый блок движется вниз и может заходить в скважину. Следовательно, в соответствии с некоторыми вариантами гидродинамический тормоз может автоматически выходить из зацепления, когда талевый блок движется вверх. Направление движения талевого блока легко может быть определено за счет контроля изменения числа импульсов в кодирующем устройстве. Например, если полное число импульсов возрастает, то тогда талевый блок движется вверх, и система может автоматически расцеплять гидродинамический тормоз. Если полное число импульсов уменьшается, и талевый блок движется вниз, то гидродинамический тормоз входит в зацепление и работает в соответствии с описанным здесь выше.
В соответствии с некоторыми вариантами настоящего изобретения включают сигнал тревоги, когда гидродинамический тормоз автоматически входит в зацепление, чтобы предупредить об этом оператора. Этим сигналом тревоги может быть звуковой сигнал тревоги или визуальный сигнал тревоги, такой как мигающий свет.
Несмотря на то, что были описаны предпочтительные варианты осуществления изобретения, совершенно ясно, что в него специалистами в данной области могут быть внесены изменения и дополнения, которые не выходят однако за рамки приведенной далее формулы изобретения. Например, многие варианты были описаны применительно к установкам для обслуживания скважин, однако следует иметь в виду, что каждый такой вариант также может быть использован на стандартных установках для бурения и на установках других типов для нефтяных скважин.
Изобретение относится к способу ввода в зацепление гидродинамического тормоза на установке для бурения или обслуживания скважины. Способ по первому варианту заключается в определении скорости вращения барабана, сравнении скорости вращения барабана с максимальным значением скорости вращения, автоматическом вводе в зацепление гидродинамического тормоза, если скорость вращения барабана превышает максимальное значение скорости вращения. Способ по второму варианту заключается в определении нагрузки на крюке установки для нефтяной скважины, сравнении нагрузки на крюке барабана с максимальной величиной нагрузки на крюке, автоматическом вводе в зацепление гидродинамического тормоза, если нагрузка на крюке барабана превышает максимальную величину нагрузки на крюке. Способ по третьему варианту включает операции способов по первому и второму варианту. Технический результат заключается в повышении эффективности тормоза, используемого на установке для бурения или обслуживания скважины. 3 н. и 37 з.п. ф-лы, 5 ил.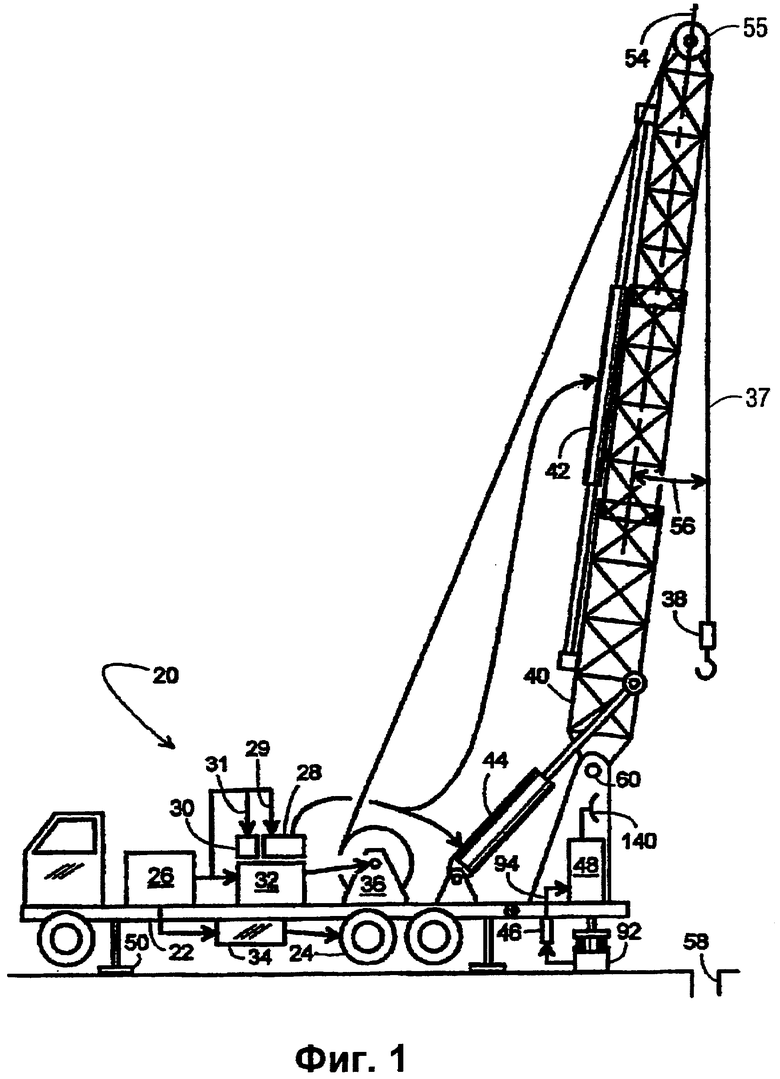
1. Способ автоматического ввода в зацепление гидродинамического тормоза на установке для нефтяной скважины, который включает в себя следующие операции: определение скорости вращения барабана установки для нефтяной скважины, сравнение скорости вращения барабана установки для нефтяной скважины с максимальным значением скорости вращения, автоматический ввод в зацепление гидродинамического тормоза, если скорость вращения барабана установки для нефтяной скважины превышает максимальное значение скорости вращения.
2. Способ по п.1, в котором скорость вращения барабана установки для нефтяной скважины определяют с использованием устройства, выбранного из группы, в которую входят магнитное записывающее устройство, фотоэлемент, импульсный датчик положения и оптический датчик положения.
3. Способ по п.1, в котором гидродинамический тормоз представляет собой центробежный водяной насос.
4. Способ по п.3, в котором центробежный водяной насос выбирают из группы, в которую входят одноступенчатый насос и многоступенчатый насос.
5. Способ по п.1, который дополнительно предусматривает использование электронного контроллера.
6. Способ по п.5, в котором электронный контроллер выбирают из группы, в которую входят компьютер, персональный компьютер и программируемый логический контроллер.
7. Способ по п.5, в котором электронный контроллер предварительно запрограммирован на максимальное значение скорости вращения.
8. Способ по п.7, в котором электронный контроллер производит сравнение скорости вращения барабана установки для нефтяной скважины с максимальным значением скорости вращения.
9. Способ по п.1, в котором гидродинамический тормоз автоматически вводят в зацепление за счет включения электромагнитного клапана, который управляет подачей воздуха в гидродинамический тормоз.
10. Способ по п.1, который дополнительно предусматривает включение сигнала тревоги, когда гидродинамический тормоз автоматически входит в зацепление.
11. Способ по п.10, в котором сигнал тревоги представляет собой звуковой сигнал тревоги или визуальный сигнал тревоги.
12. Способ по п.1, в котором установка для нефтяной скважины представляет собой установку для бурения.
13. Способ по п.1, в котором установка для нефтяной скважины представляет собой установку для обслуживания скважины.
14. Способ автоматического ввода в зацепление гидродинамического тормоза на установке для нефтяной скважины, который включает в себя следующие операции: определение нагрузки на крюке установки для нефтяной скважины, сравнение нагрузки на крюке барабана установки для нефтяной скважины с максимальной величиной нагрузки на крюке, автоматический ввод в зацепление гидродинамического тормоза, если нагрузка на крюке барабана установки для нефтяной скважины превышает максимальную величину нагрузки на крюке.
15. Способ по п.14, в котором нагрузку на крюке установки для нефтяной скважины определяют с использованием устройства, выбранного из группы, в которую входят гидравлический башмак, канатный индикатор, прикрепленный к неподвижному концу талевого каната подъемного механизма, датчик деформации, который измеряет сжимающие усилия, воздействующие на деррик-кран, и динамометрические элементы, установленные на деррик-кране установки для нефтяной скважины, а также динамометрические элементы, установленные на кронблоке установки для нефтяной скважины.
16. Способ по п.14, в котором гидродинамический тормоз представляет собой центробежный водяной насос.
17. Способ по п.16, в котором центробежный водяной насос выбирают из группы, в которую входят одноступенчатый насос и многоступенчатый насос.
18. Способ по п.14, который дополнительно предусматривает использование электронного контроллера.
19. Способ по п.18, в котором электронный контроллер выбирают из группы, в которую входят компьютер, персональный компьютер и программируемый логический контроллер.
20. Способ по п.18, в котором электронный контроллер предварительно запрограммирован на максимальное значение скорости вращения.
21. Способ по п.20, в котором электронный контроллер производит сравнение скорости вращения барабана установки для нефтяной скважины с максимальным значением скорости вращения.
22. Способ по п.14, в котором гидродинамический тормоз автоматически вводят в зацепление за счет включения электромагнитного клапана, который управляет подачей воздуха в гидродинамический тормоз.
23. Способ по п.14, который дополнительно предусматривает включение сигнала тревоги, когда гидродинамический тормоз автоматически входит в зацепление.
24. Способ по п.23, в котором сигнал тревоги представляет собой звуковой сигнал тревоги или визуальный сигнал тревоги.
25. Способ по п.14, в котором установка для нефтяной скважины представляет собой установку для бурения.
26. Способ по п.14, в котором установка для нефтяной скважины представляет собой установку для обслуживания скважины.
27. Способ автоматического ввода в зацепление гидродинамического тормоза на установке для нефтяной скважины, который включает в себя следующие операции: определение скорости вращения барабана установки для нефтяной скважины, определение нагрузки на крюке установки для нефтяной скважины, сравнение скорости вращения барабана установки для нефтяной скважины с максимальным значением скорости вращения, сравнение нагрузки на крюке барабана установки для нефтяной скважины с максимальной величиной нагрузки на крюке, автоматический ввод в зацепление гидродинамического тормоза, если скорость вращения барабана установки для нефтяной скважины превышает максимальное значение скорости вращения, или если нагрузка на крюке барабана установки для нефтяной скважины превышает максимальное значение нагрузки на крюке.
28. Способ по п.27, в котором скорость вращения барабана установки для нефтяной скважины определяют с использованием устройства, выбранного из группы, в которую входят магнитное записывающее устройство, фотоэлемент, импульсный датчик положения и оптический датчик положения.
29. Способ по п.27, в котором нагрузку на крюке установки для нефтяной скважины определяют с использованием устройства, выбранного из группы, в которую входят гидравлический башмак, канатный индикатор, прикрепленный к неподвижному концу талевого каната подъемного механизма, датчик деформации, который измеряет сжимающие усилия, воздействующие на деррик-кран, и динамометрические элементы, установленные на деррик-кране установки для нефтяной скважины, а также динамометрические элементы, установленные на кронблоке установки для нефтяной скважины.
30. Способ по п.27, в котором гидродинамический тормоз представляет собой центробежный водяной насос.
31. Способ по п.30, в котором центробежный водяной насос выбирают из группы, в которую входят одноступенчатый насос или многоступенчатый насос.
32. Способ по п.27, который дополнительно предусматривает использование электронного контроллера.
33. Способ по п.32, в котором электронный контроллер выбирают из группы, в которую входят компьютер, персональный компьютер и программируемый логический контроллер.
34. Способ по п.32, в котором электронный контроллер предварительно запрограммирован на максимальное значение скорости вращения.
35. Способ по п.34, в котором электронный контроллер производит сравнение скорости вращения барабана установки для нефтяной скважины с максимальным значением скорости вращения.
36. Способ по п.27, в котором гидродинамический тормоз автоматически вводят в зацепление за счет включения электромагнитного клапана, который управляет подачей воздуха в гидродинамический тормоз.
37. Способ по п.27, который дополнительно предусматривает включение сигнала тревоги, когда гидродинамический тормоз автоматически входит в зацепление.
38. Способ по п.37, в котором сигнал тревоги представляет собой звуковой сигнал тревоги или визуальный сигнал тревоги.
39. Способ по п.27, в котором установка для нефтяной скважины представляет собой установку для бурения.
40. Способ по п.27, в котором установка для нефтяной скважины представляет собой установку для обслуживания скважины.
| US 4043434 A, 23.08.1977 | |||
| US 5818185 A, 06.10.1998 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ УРОВНЯ ПОЛОЖЕНИЯ ЛИФТА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2184694C2 |
| US 5425435 A, 20.06.1995 | |||
| ГРУЗОВАЯ ЛЕБЕДКА | 2001 |
|
RU2214356C2 |
| JP 8290897 A, 05.11.1996 | |||
| US 3685290 A, 22.08.1972. | |||

