ОБЛАСТЬ ТЕХНИКИ
Изобретение имеет отношение к устройству для вращения объекта на экране. Изобретение также имеет отношение к приспособлению, способу вращения объекта на экране, компьютерному программному продукту и носителю.
Примерами такого устройства являются приспособления управления изображением на основе жестов, например, в области медицины, когда доктор должен оставаться стерильным, или, например, в области управления, когда контроллер выполняет управление перед одним или более экранами, или, например, в области творчества, когда художник занимается творчеством перед одним или более экранами.
УРОВЕНЬ ТЕХНИКИ
US 2009/0021475 A1 раскрывает способ отображения и/или обработки данных изображения медицинского происхождения с использованием распознавания жестов. Этот способ является относительно сложным.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача изобретения состоит в том, чтобы обеспечить относительно простое устройство. Дополнительные задачи изобретения состоят в том, чтобы обеспечить приспособление, относительно простой способ, компьютерный программный продукт и носитель.
В соответствии с первым аспектом обеспечено устройство для вращения объекта на экране, устройство содержит
блок определения для определения оси рук в ответ на первую информацию о трехмерной позиции, имеющей отношение к первой руке пользователя, и в ответ на вторую информацию о трехмерной позиции, имеющей отношение ко второй руке пользователя,
блок обнаружения для обнаружения измененной ориентации оси рук относительно оси трехмерного пространства, и
блок вычисления для вычисления вращения для объекта на экране в ответ на результат обнаружения от блока обнаружения.
Блок определения принимает первую информацию о трехмерной (3D) позиции, имеющую отношение к первой руке пользователя, и вторую информацию о трехмерной позиции, имеющую отношение ко второй руке пользователя, от системы измерения позиции, такой как трехмерная камера, или две двухмерные (2D) камеры, или детекторы системы глобального позиционирования, или детекторы системы локального позиционирования, или детекторы для обнаружения возмущений в электромагнитных полях, или детекторы на основе технологии радара или сонара и т.д. В ответ на первую и вторую информацию о трехмерной позиции блок определения определяет ось рук. Эта ось рук, например, проходит через центры рук, или проходит через кончики конкретных пальцев рук, или проходит через элементы, удерживаемые в руках, и т.д., как обозначено информацией о трехмерной позиции.
Блок обнаружения обнаруживает измененную ориентацию оси рук относительно одной или более осей трехмерного пространства, и блок вычисления вычисляет вращение для объекта на экране в ответ на результат обнаружения от блока обнаружения. В результате посредством применения оси рук было создано относительно простое устройство. Такое относительно простое устройство, например, является более быстрым, более дешевым, более устойчивым, более надежным и более безопасным относительно сбоев.
Ось рук может использоваться для большего количества целей, таких как изменение масштаба. Более длинная ось рук может соответствовать уменьшению масштаба, более короткая ось рук может соответствовать увеличению масштаба, или наоборот.
Вариант осуществления устройства определен посредством того, что измененная ориентация оси рук содержит первое изменение первого угла между осью рук и первой осью трехмерного пространства, второе изменение второго угла между осью рук и второй осью трехмерного пространства и третье изменение третьего угла между осью рук и третьей осью трехмерного пространства. Как только ось рук была определена, полезно определить измененную ориентацию оси рук с точки зрения изменений углов между осью рук и каждой осью трехмерного пространства.
Вариант осуществления устройства определен посредством того, что каждое из первого, второго и третьего изменений является не равным нулю. В этом случае пользователь выполняет или выполнил трехмерное вращение.
Вариант осуществления устройства определен посредством того, что блок обнаружения содержит угловой детектор для обнаружения первого, второго и третьего углов, содержит компаратор для сравнения соответствующих первого, второго и третьего углов с соответствующими первым, вторым и третьим порогами и содержит ослабитель для уменьшения одного или более из соответствующих первого, второго и третьего изменений в ответ на соответствующие первый, второй и третий результаты сравнения. В случае, если первый (второй, третий) угол равен или меньше первого (второго, третьего) порога, первое (второе, третье) изменение может быть уменьшено для улучшения устойчивости.
Вариант осуществления устройства определен посредством того, что один из первого, второго и третьего результатов сравнения указывает, что соответствующий угол является равным или меньше соответствующего порога, и ослабитель уменьшает соответствующее изменение до нуля.
Вариант осуществления устройства определен посредством того, что один из первого, второго и третьего результатов сравнения указывает, что соответствующий угол является равным или меньше соответствующего порога, и ослабитель нагружает соответствующее изменение весовым коэффициентом. Весовой коэффициент при этом обычно составляет от 0% до 100%.
Вариант осуществления устройства определен посредством того, что два из первого, второго и третьего результатов сравнения указывают, что соответствующие углы являются равными или меньше соответствующих порогов, и ослабитель нагружает соответствующие изменения весовыми коэффициентами. Каждый весовой коэффициент при этом обычно составляет от 0% до 100%.
Вариант осуществления устройства определен посредством того, что один или два из первого, второго и третьего изменений являются не равными нулю. В этом случае пользователь выполняет или выполнил одномерное (1D) или двухмерное вращение.
Вариант осуществления устройства определен посредством того, что каждое из первого, второго и третьего изменений является изменением во временном интервале. Большинство систем измерения позиции обеспечивает информацию о позиции во временном интервале, или в кадре, или об изменении во времени.
Вариант осуществления устройства определен посредством того, что первая ось трехмерного пространства является осью X, вторая ось трехмерного пространства является осью Y, и третья ось трехмерного пространства является осью Z. Обычно ось X и ось Y представляют собой в значительной степени горизонтальную и в значительной степени вертикальную оси, параллельные по отношению к передней части системы измерения позиции, и ось Z является осью, в значительной степени перпендикулярной по отношению к этой передней части системы измерения позиции, но может использоваться любая другая система осей.
Вариант осуществления устройства определен посредством того, что первая информация о трехмерной позиции, имеющая отношение к первой руке пользователя, содержит первую абсолютную или относительную трехмерную координату, и вторая информация о трехмерной позиции, имеющая отношение ко второй руке пользователя, содержит вторую абсолютную или относительную трехмерную координату, и ось рук проходит через обе трехмерные координаты.
В соответствии со вторым аспектом обеспечено приспособление, содержащее устройство и дополнительно содержащее систему измерения позиции для обеспечения первой и второй информацию о позиции и/или экран.
В соответствии с третьим аспектом обеспечен способ вращения объекта на экране, способ содержит этапы, на которых
определяют ось рук в ответ на первую информацию о трехмерной позиции, имеющую отношение к первой руке пользователя, и в ответ на вторую информацию о трехмерной позиции, имеющую отношение ко второй руке пользователя,
обнаруживают измененную ориентацию оси рук относительно оси трехмерного пространства, и
вычисляют вращение для объекта на экране в ответ на результат обнаружения.
В соответствии с четвертым аспектом обеспечен компьютерный программный продукт для выполнения этапов способа.
В соответствии с пятым аспектом обеспечен носитель для хранения, содержащий компьютерный программный продукт.
Варианты осуществления способа соответствуют вариантам осуществления устройства.
Суть состоит в том, что для вращения объекта на экране предполагается, что воображаемая копия объекта находится внутри удерживаемого пользователем воображаемого шара, который должен быть повернут. Основная идея может состоять в том, что должна быть определена ось рук между руками пользователя, должна быть обнаружена измененная ориентация оси рук, и в ответ должно быть вычислено вращение для объекта на экране.
Проблема обеспечения относительно простого устройства была решена. Дополнительное преимущество может состоять в том, что такое относительно простое устройство, например, является более быстрым, более дешевым, более устойчивым, более надежным и более безопасным относительно сбоев.
Эти и другие аспекты изобретения будут освещены и понятны со ссылкой на описанные далее варианты осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертежах:
Фиг.1 показывает приспособление, содержащее устройство, и
Фиг.2 показывает ось рук между двумя руками в трехмерном пространстве.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
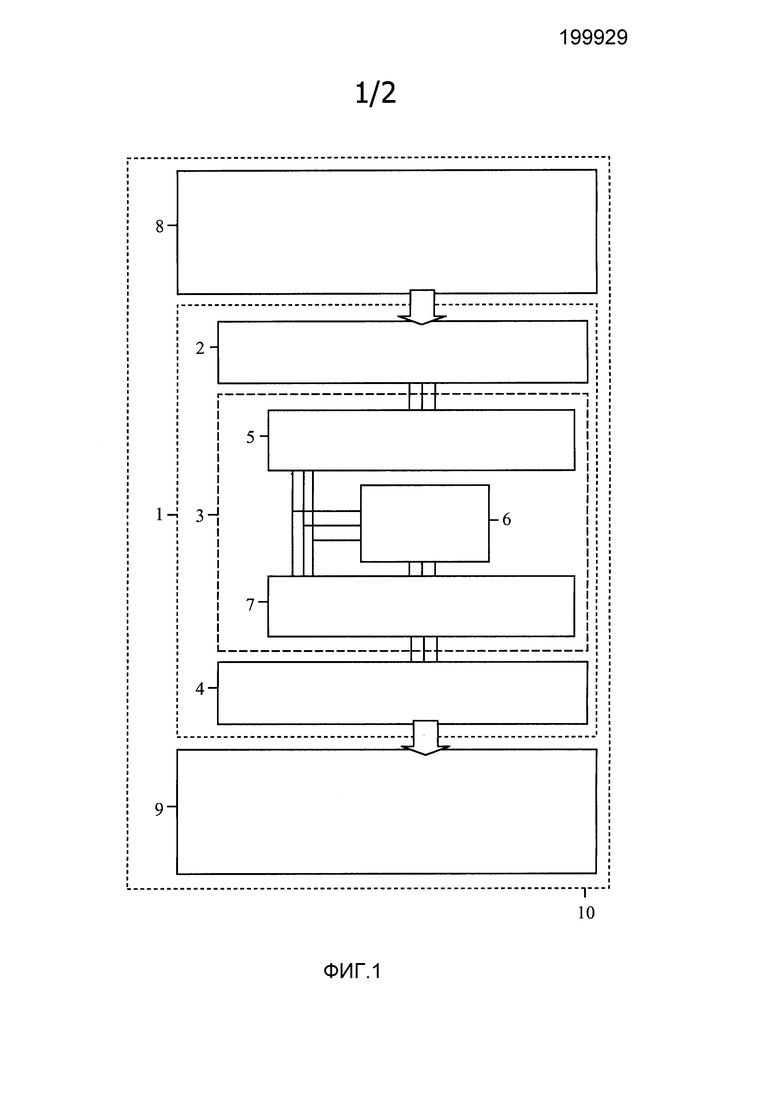
На фиг.1 показано приспособление, содержащее устройство. Приспособление 10 содержит систему 8 измерения позиции для обеспечения первой информации о трехмерной (3D) позиции, относящейся к первой руке пользователя, и второй информации о трехмерной позиции, относящейся ко второй руке пользователя, устройство 1 и экран 9. Устройство 1 для вращения объекта на экране 9 содержит блок 2 определения для определения оси рук в ответ на первую информацию о трехмерной позиции и в ответ на вторую информацию о трехмерной позиции. Устройство 1 дополнительно содержит блок 3 обнаружения для обнаружения измененной ориентации оси рук относительно оси трехмерного пространства и блок 4 вычисления для вычисления вращения для объекта, показываемого на экране 9, в ответ на результат обнаружения от блока 3 обнаружения.
Система 8 измерения позиции может содержать трехмерную камеру, или две двухмерные (2D) камеры, или детекторы системы глобального позиционирования, или детекторы локальной системы позиционирования, или детекторы для обнаружения возмущений в электромагнитных полях, или детекторы на основе технологии радара или сонара и т.д. Устройство 1 может содержать систему определения/обнаружения/вычисления любого вида, такую как один или более процессоров и/или один или более компьютеров и т.д. Экран 9 может содержать экран любого вида, такой как дисплей, или проектор, или традиционный телевизор и т.д.
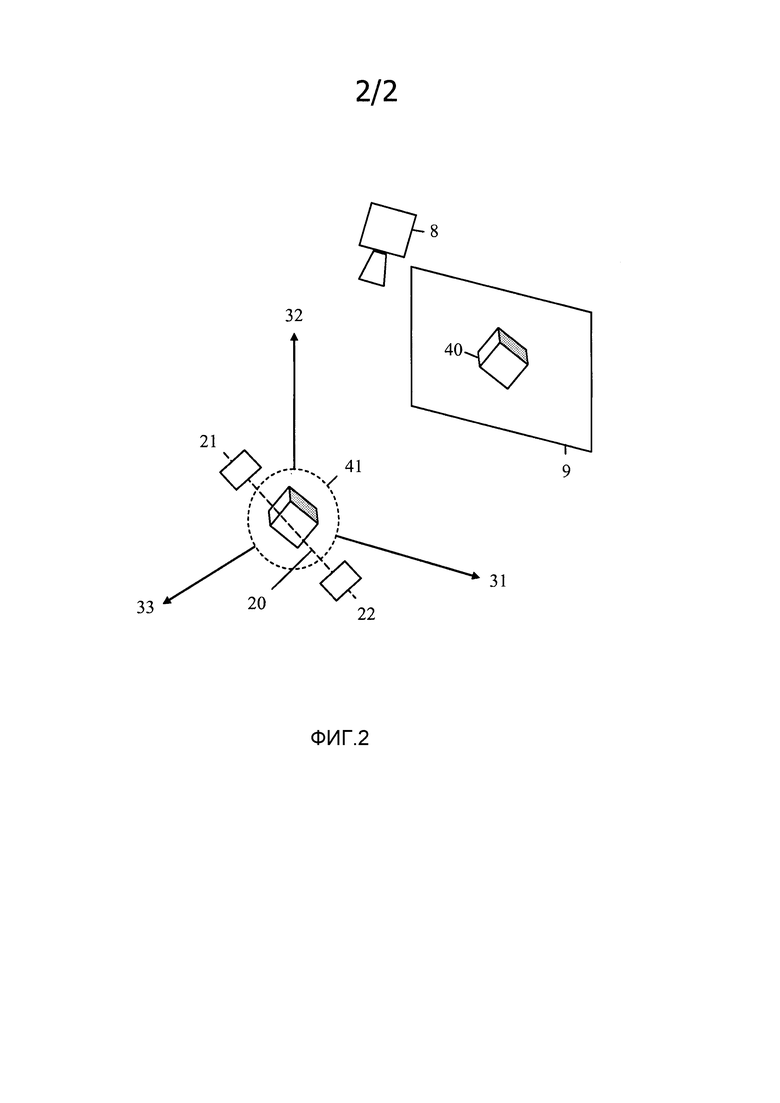
На фиг.2 показана ось рук между двумя руками в трехмерном пространстве. Ось 20 рук между первой рукой 21 и второй рукой 22 пользователя создает первый угол с первой осью 31 трехмерного пространства, например, с осью X, создает второй угол со второй осью 32 трехмерного пространства, например, с осью Y, и создает третий угол с третьей осью 33 трехмерного пространства, например, с осью Z. На фиг.2 также показан экран 9, отображающий объект 40, и система 8 измерения позиции, имеющая здесь вид трехмерной камеры. Руки 21 и 22 виртуально держат воображаемый шар 41, который содержит воображаемую копию объекта 40, отображаемого на экране 9. Когда пользователь двигает своими руками 21 и 22, чтобы повернуть воображаемый шар 41 в трехмерном пространстве на один или более градусов, ось 20 рук изменяет ориентацию (в результате вращения на один или более градусов), и один или более из первого, второго и третьего углов изменяются. Вместо воображаемого шара 41 может использоваться любой другой имеющий форму элемент. Эта ось 20 рук, например, проходит через центры рук 21-22, или проходит через кончики конкретных пальцев рук 21-22, или проходит через элементы, удерживаемые в руках 21-22, и т.д., как обозначено информацией о трехмерной позиции.
Предпочтительно измененная ориентация оси 20 рук может содержать первое изменение первого угла между осью 20 рук и первой осью 31 трехмерного пространства, второе изменение второго угла между осью 20 рук и второй осью 32 трехмерного пространства и третье изменение третьего угла между осью 20 рук и третьей осью 33 трехмерного пространства.
В случае, если пользователь выполняет или выполнил трехмерное вращение, каждое из первого, второго и третьего изменений будут не равны нулю. В этом случае при определенных обстоятельствах трехмерное вращение иногда может становиться нестабильным, посредством чего, например, относительно малое изменение угла между осью 20 рук и одной из первой, второй и третьей осей 31, 32 и 33 трехмерного пространства может привести к относительно большому изменению на экране 9. Чтобы решить эту проблему, как показано на фиг.1, блок 3 обнаружения может быть снабжен угловым детектором 5 для обнаружения первого, второго и третьего углов, компаратором 6 для сравнения соответствующих первого, второго и третьего углов с соответствующими первым, вторым и третьим порогами и ослабителем 7 для уменьшения одного или более из соответствующих первого, второго и третьего изменений в ответ на соответствующие первый, второй и третий результаты сравнения.
Например, в случае, если один из первого, второго и третьего результатов сравнения указывает, что соответствующий угол равен или меньше соответствующего порога, ослабитель 7 может уменьшить соответствующее изменение до нуля. Этот случай соответствует блокированию конкретной одной из первой, второй и третьей осей 31, 32 и 33 трехмерного пространства и соответствует игнорированию угловых изменений между осью 20 рук и этой конкретной одной из осей трехмерного пространства.
Например, в случае, если один из первого, второго и третьего результатов сравнения указывает, что соответствующий угол равен или меньше соответствующего порога, ослабитель 7 может нагрузить соответствующее изменение весовым коэффициентом. Этот случай соответствует ослаблению влияния от конкретной одной из первой, второй и третьей осей 31, 32 и 33 трехмерного пространства и соответствует сокращению угловых изменений между осью 20 рук и этой конкретной одной осью трехмерного пространства. Величина весового коэффициента и величина сокращения могут зависеть или не зависеть от размера соответствующего угла. Соответствующий порог может иметь постоянную величину или может зависеть от скорости вращения, устойчивости пользователя, опыта пользователя, размера другого угла, другого порога и дополнительных признаков и т.д. Аналогичным образом упомянутый весовой коэффициент может зависеть от признаков этого вида и т.д.
Например, в случае, если два из первого, второго и третьего результатов сравнения указывают, что соответствующие углы равны или меньше соответствующих порогов, ослабитель 7 может нагрузить соответствующие изменения весовыми коэффициентами. Этот случай соответствует ослаблению влияния от двух конкретных осей из первой, второй и третьей осей 31, 32 и 33 трехмерного пространства и соответствует сокращению угловых изменений между осью 20 рук и этими двумя конкретными осями трехмерного пространства. Величина весовых коэффициентов и величина сокращения могут зависеть или не зависеть от размеров соответствующих углов. Соответствующие пороги могут иметь постоянную величину или могут зависеть от скоростей вращения, устойчивости пользователя, опыта пользователя, размера другого угла, другого порога и дополнительных признаков и т.д. Аналогичным образом, упомянутые весовые коэффициенты могут зависеть от признаков этого вида и т.д.
В случае, если пользователь выполняет или выполнил одномерное (1D) или двухмерное вращение, одно или два из первого, второго и третьего изменений будут не равны нулю. В этом случае обычно одномерное или двухмерное вращение не будут становиться нестабильными.
Предпочтительно каждое из первого, второго и третьего изменений может являться изменением во временном интервале. Большинство систем 8 измерения позиции обеспечивают информацию о позиции во временном интервале, или в кадре, или об изменении в течение времени.
Предпочтительно первая информация о трехмерной позиции, имеющая отношение к первой руке 21 пользователя, может содержать первую абсолютную или относительную трехмерную координату, и вторая информацию о трехмерной позиции, имеющая отношение ко второй руке 22 пользователя, может содержать вторую абсолютную или относительную трехмерную координату, и ось 20 рук может походить через обе трехмерные координаты.
В итоге устройство 1 для вращения объектов 40 на экранах 9 определяет ось 20 рук в ответ на информацию о трехмерной позиции, относящуюся к рукам 21, 22 пользователя, обнаруживает измененную ориентацию оси 20 рук относительно трехмерного пространства и вычисляет вращение для объекта 40 на экране 9 в ответ на упомянутое обнаружение. Таким образом, для вращения объекта 40 на экране 9 предполагается, что воображаемая копия объекта 40 находится в удерживаемом пользователем воображаемом шаре 41, который поворачивается. Измененная ориентация оси 20 рук содержит изменения углов между осью 20 рук и осями 31, 32, 33 трехмерного пространства. Чтобы улучшить устойчивость в случае, когда каждое из упомянутых изменений не равно нулю, устройство 1 дополнительно обнаруживает углы, сравнивает соответствующие углы с соответствующими порогами и уменьшает или нагружает весовыми коэффициентами соответствующие изменения в ответ на соответствующие результаты сравнения.
Хотя изобретение было подробно проиллюстрировано и описано на чертежах и в предшествующем описании, такая иллюстрация и описание должны рассматриваться как иллюстративные, а не ограничивающие; изобретение не ограничено раскрытыми вариантами осуществления. Другие изменения раскрытых вариантов осуществления могут быть понятны специалистам в данной области техники и реализованы ими при осуществлении заявленного изобретения на основании изучения чертежей, раскрытия и приложенной формулы изобретения. В формуле изобретения слово "содержит" не исключает другие элементы или этапы, и использование единственного числа не исключает множество. Тот лишь факт, что некоторые меры описаны во взаимно различных зависимых пунктах формулы изобретения, не указывает, что комбинация этих мер не может использоваться для получения преимуществ. Любые номера ссылочных позиций в формуле изобретения не должны рассматриваться как ограничение объема.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО ПРЕДОХРАНЕНИЯ ОТ СТОЛКНОВЕНИЙ И СОХРАНЕНИЯ КОМПОЗИЦИИ КАМЕРЫ | 2018 |
|
RU2745828C1 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО С УЗЛОМ ВОСПРИЯТИЯ И СПОСОБ ИНТЕРПРЕТАЦИИ СМЕЩЕННЫХ ЖЕСТОВ | 2010 |
|
RU2546063C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ, СПОСОБ УПРАВЛЕНИЯ И НОСИТЕЛЬ ХРАНЕНИЯ | 2018 |
|
RU2720356C1 |
| СИСТЕМА ДЛЯ РАСПОЗНАВАНИЯ И ОТСЛЕЖИВАНИЯ ПАЛЬЦЕВ | 2012 |
|
RU2605370C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ, ПРОГРАММА И СПОСОБ УПРАВЛЕНИЯ | 2011 |
|
RU2586015C2 |
| РАСПРОСТРАНЯЮЩИЕСЯ ОБНОВЛЕНИЯ ПЛОСКОСТИ РАЗРЫВА | 2013 |
|
RU2594372C1 |
| Способ автоматического определения ориентации надводных судов с использованием оптико-электронной системы беспилотного летательного аппарата | 2023 |
|
RU2830991C1 |
| ИНЕРЦИАЛЬНОЕ УСТРОЙСТВО И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ СИСТЕМАМИ | 2015 |
|
RU2648938C2 |
| АВТОМАТИЧЕСКОЕ ГЕНЕРИРОВАНИЕ ВИЗУАЛЬНОГО ПРЕДСТАВЛЕНИЯ | 2010 |
|
RU2560340C2 |
| ДИСПЛЕЙ, ПОМЕЩАЮЩИЙ ФИЗИЧЕСКИЙ ОБЪЕКТ В ПРЕДЕЛАХ ТРЕХМЕРНОГО ОБЪЕМНОГО ПРОСТРАНСТВА | 2015 |
|
RU2678658C2 |
Изобретение относится к устройству для вращения объекта на экране. Технический результат заключается в повышении скорости ввода данных. Устройство определяет ось рук в ответ на информацию о трехмерной позиции, имеющую отношение к рукам пользователя, обнаруживает измененную ориентацию оси рук относительно трехмерного пространства и вычисляет вращение для объекта на экране в ответ на упомянутое обнаружение. Для вращения объекта на экране предполагается, что воображаемая копия объекта удерживается пользователем в воображаемом шаре, который поворачивается. Измененная ориентация оси рук содержит изменения углов между осью рук и осями трехмерного пространства. Для улучшения устойчивости в случае, когда каждое из упомянутых изменений не является равным нулю, устройство дополнительно обнаруживает углы, сравнивает соответствующие углы с соответствующими порогами и уменьшает или нагружает соответствующие изменения весовыми коэффициентами в ответ на соответствующие результаты сравнения. 4 н. и 9 з.п. ф-лы, 2 ил.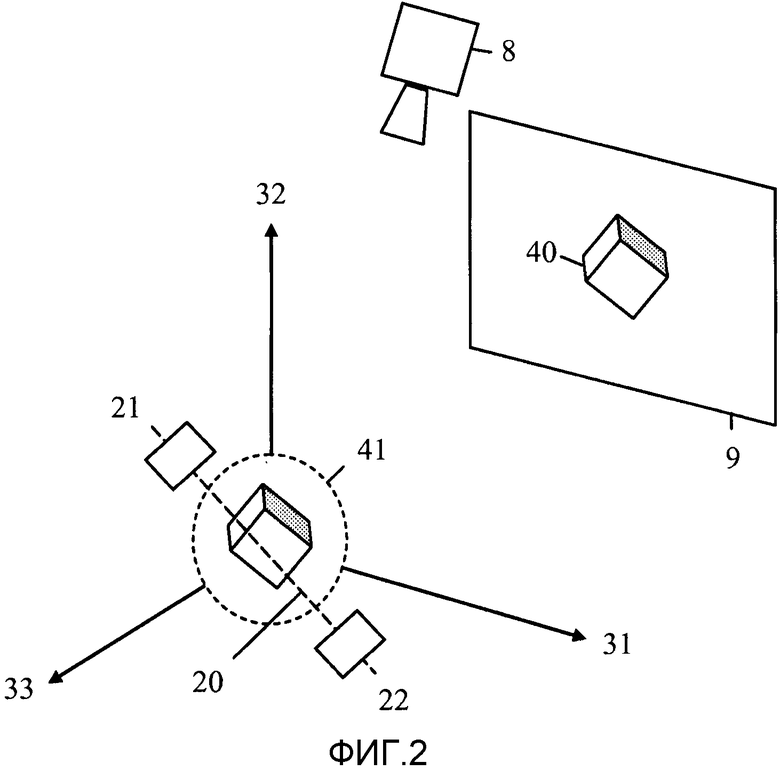
1. Устройство (1) для вращения объекта (40) на экране (9), причем устройство (1) содержит:
блок (2) определения для определения оси (20) рук в ответ на первую информацию о трехмерной позиции, имеющую отношение к первой руке (21) пользователя, и в ответ на вторую информацию о трехмерной позиции, имеющую отношение ко второй руке (22) пользователя,
блок (3) обнаружения для обнаружения измененной ориентации оси (20) рук относительно осей (31, 32, 33) трехмерного пространства, причем измененная ориентация оси (20) рук содержит первое изменение первого угла между осью (20) рук и первой осью (31) трехмерного пространства, второе изменение второго угла между осью (20) рук и второй осью (32) трехмерного пространства и третье изменение третьего угла между осью (20) рук и третьей осью (33) трехмерного пространства, и
блок (4) вычисления для вычисления 3D вращения объекта (40), представленного на экране (9), в ответ на результат обнаружения от блока (3) обнаружения, причем вычисление содержит определение первого угла вращения объекта (40) на основе упомянутого первого изменения первого угла, второго угла вращения объекта (40) на основе упомянутого второго изменения второго угла и третьего угла вращения объекта (40) на основе упомянутого третьего изменения третьего угла.
2. Устройство (1) по п. 1, в котором каждое из первого, второго и третьего изменений является не равным нулю.
3. Устройство (1) по п. 2, в котором блок (3) обнаружения содержит угловой детектор (5) для обнаружения первого, второго и третьего углов, содержит компаратор (6) для сравнения соответствующих первого, второго и третьего углов с соответствующими первым, вторым и третьим порогами и содержит ослабитель (7) для уменьшения одного или более соответствующих первого, второго и третьего изменений в ответ на соответствующие первый, второй и третий результаты сравнения.
4. Устройство (1) по п. 3, в котором один из первого, второго и третьего результатов сравнения указывает, что соответствующий угол является равным или меньше соответствующего порога, и ослабитель (7) сокращает соответствующее изменение до нуля.
5. Устройство (1) по п. 3, в котором один из первого, второго и третьего результатов сравнения указывает, что соответствующий угол является равным или меньше соответствующего порога, и ослабитель (7) нагружает соответствующее изменение весовым коэффициентом.
6. Устройство (1) по п. 3, в котором два из первого, второго и третьего результатов сравнения указывают, что соответствующие углы являются равными или меньше соответствующих порогов, и ослабитель (7) нагружает соответствующие изменения весовыми коэффициентами.
7. Устройство (1) по п. 1, в котором один или два из первого, второго и третьего изменений являются не равными нулю.
8. Устройство (1) по п. 1, в котором каждое из первого, второго и третьего изменений являются изменениями во временном интервале.
9. Устройство (1) по п. 1, в котором первая ось (31) трехмерного пространства является осью X, вторая ось (32) трехмерного пространства является осью Y и третья ось (33) трехмерного пространства является осью Z.
10. Устройство (1) по п. 1, в котором первая информация о трехмерной позиции, имеющая отношение к первой руке (21) пользователя, содержит первую абсолютную или относительную трехмерную координату, и вторая информация о трехмерной позиции, имеющая отношение ко второй руке (22) пользователя, содержит вторую абсолютную или относительную трехмерную координату, и ось (20) рук проходит через обе трехмерные координаты.
11. Приспособление (10) для вращения объекта (40) на экране (9), содержащее устройство (1) по п. 1 и дополнительно содержащее систему (8) измерения позиции для обеспечения первой и второй информации о позиции и/или экран (9).
12. Способ вращения объекта (40) на экране (9), причем способ содержит этапы, на которых:
определяют ось (20) рук в ответ на первую информацию о трехмерной позиции, имеющую отношение к первой руке (21) пользователя, и в ответ на вторую информацию о трехмерной позиции, имеющую отношение ко второй руке (22) пользователя,
обнаруживают измененную ориентацию оси (20) рук относительно осей (31, 32, 33) трехмерного пространства, и
вычисляют 3D вращение объекта (40), представленного на экране (9), в ответ на результат обнаружения,
при этом этап обнаружения измененной ориентации оси (20) рук содержит обнаружение первого изменения первого угла между осью (20) рук и первой осью (31) трехмерного пространства, второго изменения второго угла между осью (20) рук и второй осью (32) трехмерного пространства и третьего изменения третьего угла между осью (20) рук и третьей осью (33) трехмерного пространства, и
при этом этап вычисления 3D вращения объекта (40) содержит определение первого угла вращения объекта (40) на основе упомянутого первого изменения первого угла, второго угла вращения объекта (40) на основе упомянутого второго изменения второго угла и третьего угла вращения объекта (40) на основе упомянутого третьего изменения третьего угла.
13. Носитель для хранения, содержащий компьютерный программный продукт для выполнения этапов способа по п. 12.
| Richard A | |||
| Bolt, Two-handed gesture in multi-modal natural dialog, Massachusetts Institute of Technology, 1992 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199716C2 |

