ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к миниатюрным инерциальным устройствам для дистанционного управления электронными системами, а более конкретно к устройству ввода, выполненному с возможностью обнаружения вращения и с возможностью посылать команды управления на основе вращений, а также к способам дистанционного управления электронными системами с использованием указанного инерциального устройства.
УРОВЕНЬ ТЕХНИКИ
В настоящее время разработаны разнообразные устройства, позволяющие управлять электронными системами и осуществлять ввод информации.
Известны такие устройства ввода информации и взаимодействия с электронными системами, как мыши, джойстики, стилусы, трекболы, которые позволяют пользователю выбирать операции и перемещать курсор на экране дисплея устройства в ответ на перемещение устройства ввода.
Тем не менее, мышь, джойстик и т.д. требуют наличия поверхности, на которой их можно перемещать, например, стола или поверхности сенсорного экрана. Гироскопические указатели, как описано в US 4787051, например, не нуждаются в поверхности, но имеют ограничение свободы действовать, как правило, только на перемещение курсора влево-вправо, вверх-вниз.
Так как компьютеры и другие электронные устройства стремительно развиваются, управление в двух измерениях не является достаточным, и было бы полезно увеличить степень свободы для ввода более широкого спектра информации. Такой контроль, например, будет позволять изменить масштаб или прокрутить страницу на основе движения руки человека или изменить вид приложения. Кроме того, для такого устройства важно иметь привычную и удобную для манипуляции форму, например, карандаша, а также, чтобы ошибки, связанные с неточностью работы датчиков, не приводили к нежелательному ответу на устройстве и нарушениям контроля.
Инерциальная часть устройства ввода обычно состоит из одного, двух или трех акселерометров (или одного 3-осевого акселерометра) и одного, двух или трех гироскопов (или одного 3-осевого гироскопа).
Гироскоп - это устройство, предназначенное для измерения или поддержания ориентации, как правило, путем измерения угловой скорости поворота по отношению к заданной оси. Гироскопы могут быть изготовлены на основе нескольких методов, но выполненные по микроэлектромеханической технологии (MEMS) гироскопы являются самыми популярными, особенно в области бытовой электроники и других не требующих высокой точности крупносерийных приложений из-за своей низкой стоимости, небольших размеров и низкого энергопотребления.
Датчики ускорения или акселерометры предназначены для измерения кажущегося ускорения. Они также могут быть сконструированы на основании MEMS-технологии, но бывают и других типов, например, струнные и маятниковые. MEMS-технология, так же, как и в случае с гироскопами, позволяет снизить стоимость и обеспечить достаточную точность при небольших размерах.
Акселерометр - это устройство, измеряющее проекцию кажущегося ускорения (разности между истинным ускорением объекта и гравитационным ускорением). Как правило, акселерометр представляет собой чувствительную массу, закрепленную в упругом подвесе. Отклонение массы от ее первоначального положения при наличии кажущегося ускорения несет информацию о величине этого ускорения. При нулевом истинном ускорении акселерометр будет измерять проекцию гравитационного ускорения на ось его чувствительности. Таким образом, при помощи трехосевого акселерометра возможно определение его положения по отношению к вектору гравитации.
Известны способы дистанционного управления электронными системами с использованием устройств, имеющих гироскопы и акселерометры, например, как описано в KR 20130095551, KR 20140032782 и в KR 20130115452, который взят нами как прототип.
Как правило, гироскопы и акселерометры в известных устройствах управления используются для определения положения устройства в пространстве.
Известное устройство и способ с его использованием представляет собой устройство дистанционного управления различными телевизионными приемниками и приставками, содержащее в своем составе гироскопы и акселерометры, и используется для управления экранным указателем в соответствии с перемещением устройства в пространстве.
Однако это устройство не использует вращение вокруг своей третьей оси для управления экранным интерфейсом и требует, чтобы оператор держал его определенным образом по отношению к горизонту (в противном случае повороты руки оператора с устройством вокруг вертикальной и горизонтальной оси будут преобразовываться в команды управления курсором с ошибкой).
Заявитель неожиданно обнаружил, что наличие гироскопов и акселерометров в устройстве управления электронными системами, включающем микропроцессор, канал передачи данных, устройство обратной связи, сенсорные датчики прикосновения и источник питания, в сочетании с продолговатой его формой, например, формой продолговатого цилиндра, пишущей ручки или карандаша, позволяет легко и эргономично управлять прокруткой (вверх и вниз) и/или масштабированием, например, содержимого компьютерного экрана, посредством вращения устройства в свободном пространстве вокруг продольной его оси, при этом значение угловой скорости, при превышении которого устройство включает данный режим, легко может быть изменено пользователем, т.е. такие настройки могут быть индивидуальными.
При этом устройство определяет величину поворотов корпуса в горизонтальной и вертикальной плоскостях вне зависимости от угла, на который этот корпус повернут относительно своей продольной оси.
Устройство, описанное в настоящей заявке, в отличие от известного из уровня техники, вне зависимости от его поворота вокруг своей продольной оси, преобразует свою систему координат таким образом, что оси, поворот вокруг которых используется для перемещения курсора экранного интерфейса вверх-вниз и вправо-влево, всегда привязаны к положению горизонта.
Такой подход позволяет, кроме возможности держать устройство в руке, не обращая внимания на его поворот вокруг продольной оси, использовать этот поворот для управления экранным интерфейсом, например реализуя таким способом прокрутку или масштабирование объектов экрана.
Это обеспечивает точную быструю промотку страниц и отсутствие ошибок позиционирования экранного указателя, вызванных наклоном плоскостей поворота устройства по отношению к горизонту.
Далее было также обнаружено, что гироскоп и акселерометр в таком приборе позволяют управлять прокруткой и/или масштабированием в положениях продольной оси корпуса с отклонением от вертикального не более чем на определенную величину, в этом случае все функции, кроме управления прокруткой или масштабированием, отключаются; эта величина также может быть индивидуально задана пользователем.
Кроме компьютеров такой режим позволяет управлять мультимедийным проектором, телевизором, игровой приставкой, дистанционно управляемой игрушкой, музыкальной системой, а так же системами виртуальной и дополненной реальности.
В таком случае, кроме прокрутки или переключения страниц, масштабирования изображения, текста, окна программы, так же легко и удобно можно производить увеличение или уменьшение уровня звука, освещенности или изменение параметров движения, например, дистанционно управляемой игрушки.
Важным свойством представляемого устройства также является то, что оно универсально и может быть использовано в управлении и персональным компьютером и другими приборами без внесения конструктивных изменений в устройство, при этом электронные системы, в которых предусмотрена возможность управления посредством мыши, могут управляться и без установки дополнительного программного обеспечения.
Заявителю не удалось обнаружить в уровне техники известные инерциальные устройства, которые решали бы те же задачи и обладали бы теми же существенными признаками.
Таким образом, изобретение относится к инерциальным устройствам дистанционного управления электронными системами, включающим трехосевой гироскоп, трехосевой акселерометр, микропроцессор, канал передачи данных, устройство тактильной обратной связи, сенсорные датчики прикосновения и источник питания, заключенным в корпус продолговатой формы и определяющим величину поворотов указанного корпуса в горизонтальной и вертикальной плоскостях вне зависимости от угла, на который этот корпус повернут относительно своей продольной оси; где часть функций управления может осуществляться при превышении значения угловой скорости по продольной оси корпуса выше заданной пользователем величины, а часть функций управления может осуществляться в положениях продольной оси корпуса с отклонением от вертикального не более чем на заданную пользователем величину и где управление не требует поверхности.
Также изобретение относится к способу дистанционного управления электронными системами с использованием описанного инерциального устройства, включающему определение величины поворотов корпуса устройства в горизонтальной и вертикальной плоскостях вне зависимости от угла, на который этот корпус повернут относительно своей продольной оси, и дистанционную передачу данных; где часть функций управления может осуществляться при превышении значения угловой скорости по продольной оси корпуса выше заданной пользователем величины; часть функций управления может осуществляться в положениях продольной оси корпуса с отклонением от вертикального не более чем на заданную пользователем величину и где управление не требует поверхности.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Далее описано следующее.
Инерциальное устройство для дистанционного управления электронными системами, включающее:
- по меньшей мере один трехосевой MEMS-гироскоп,
- по меньшей мере один трехосевой MEMS-акселерометр,
- по меньшей мере один микропроцессор,
- по меньшей мере один канал передачи данных,
и источник питания, дополнительно содержащее устройство тактильной обратной связи и по меньшей мере два сенсорных датчика прикосновения и заключенное в корпус продолговатой формы, определяющее величину поворотов указанного корпуса в горизонтальной и вертикальной плоскостях вне зависимости от угла, на который этот корпус повернут относительно своей продольной оси; позволяющее осуществлять часть функций управления при превышении значения угловой скорости по продольной оси корпуса выше заданной пользователем величины; а часть функций управления - в положениях продольной оси корпуса с отклонением от вертикального не более чем на заданную пользователем величину.
В частных случаях указанными частями функций являются прокрутка и/или масштабирование.
В частных вариантах исполнения корпус может иметь форму продолговатого цилиндра, пишущей ручки или карандаша.
В частных вариантах исполнения сенсорные датчики используются для управления графическим интерфейсом, а также один из сенсорных датчиков может использоваться для активации устройства при наличии контакта с ним руки пользователя.
В частных вариантах исполнения канал связи является беспроводным и представляет собой Bluetooth.
Также в настоящем описании рассматриваются способы дистанционного управления электронными системами с использованием инерциального устройства, включающего:
- по меньшей мере один трехосевой MEMS-гироскоп,
- по меньшей мере один трехосевой MEMS-акселерометр,
- по меньшей мере один микропроцессор,
- по меньшей мере один канал передачи данных,
и источник питания, дополнительно содержащего устройство тактильной обратной связи и по меньшей мере два сенсорных датчика прикосновения и заключенного в корпус продолговатой формы, включающий определение величины поворотов корпуса устройства в горизонтальной и вертикальной плоскостях вне зависимости от угла, на который этот корпус повернут относительно своей продольной оси, и дистанционную передачу данных; где часть функций управления может осуществляться при превышении значения угловой скорости по продольной оси корпуса выше заданной пользователем величины и где управление не требует поверхности.
Также часть функций управления может осуществляться в положениях продольной оси корпуса с отклонением от вертикального не более чем на заданную пользователем величину.
В частных случаях управляемое электронное устройство является персональным компьютером (ПК), мультимедийным проектором, телевизором, игровой приставкой, дистанционно управляемой игрушкой, музыкальной системой, системой освещения и т.д., а часть функций управления, которая может осуществляться при превышении значения угловой скорости по продольной оси выше заданной пользователем величины, представляет собой прокрутку или переключение страниц, масштабирование изображения, текста, окна программы; увеличение или уменьшение уровня звука, освещенности или изменение параметров движения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В рамках настоящей заявки под термином "электронные системы" понимается любая электронная система, использующая интерфейс человек-компьютер и имеющая в своем составе какое-либо устройство для визуализации информации и дальнейшего считывания ее человеком. К таким системам, например, относятся: персональные компьютеры, как настольные, так и портативные; телевизоры; медиаплееры; системы, использующие для отображения информации очки виртуальной и дополненной реальности; игровые приставки, смартфоны, планшетные компьютеры, системы, использующие для визуализации информации видеопроекторы или голографические проекторы; системы, использующие визуализацию путем проецирования изображения на стекло транспортного средства.
Под термином "графический интерфейс" в рамках настоящей заявки понимается разновидность пользовательского интерфейса, в котором элементы интерфейса (меню, кнопки, значки, списки и т.п.), представленные пользователю на дисплее, исполнены в виде графических изображений. В таком интерфейсе пользователь имеет произвольный доступ (с помощью устройств ввода - клавиатуры, мыши, джойстика, джестора и т.п.) ко всем видимым экранным объектам (элементам интерфейса) и осуществляет непосредственное манипулирование ими.
Под термином "гироскоп" в рамках настоящей заявки понимается датчик угловой скорости, то есть прибор, измеряющий угловую скорость своего вращения в инерциальном пространстве вокруг одной (одноосевой гироскоп) или нескольких (трехосевой гироскоп) осей чувствительности.
Под термином "акселерометр" в рамках настоящей заявки понимается прибор для измерения кажущегося ускорения направленного вдоль оси (одноосевой) или осей (трехосевой) прибора.
Под термином "микропроцессор" в рамках настоящей заявки понимается программное управляемое устройство для обработки информации, выполненное в виде однокристальной микросхемы и содержащее как АЛУ (арифметико-логическое устройство), так и ОЗУ (оперативное запоминающее устройство), ПЗУ (постоянное запоминающее устройство).
Под термином "канал передачи данных" в рамках настоящей заявки понимается система технических средств, обеспечивающая передачу данных в двух направлениях (от инерциального устройства к электронной системе и от электронной системы к инерциальному устройству) на скоростях не ниже 57600 бит в секунду и использующая проводную или беспроводную среду распространения сигнала. Например, USB в качестве проводного канала или Bluetooth в качестве беспроводного канала связи.
Под термином "источник питания" в рамках настоящей заявки понимается любой источник питания, обеспечивающий автономную работу прибора. Например, гальванический элемент или аккумулятор.
Под термином "устройство тактильной обратной связи" в рамках настоящей заявки понимается любое устройство, позволяющее человеку получать информацию о функционировании прибора через прикосновение, такое как вибромотор или солиноид, способный создавать ощутимые сейсмические импульсы на поверхности прибора.
Под термином "сенсорный датчик прикосновения" в рамках настоящей заявки понимается электрическая площадка, покрытая диэлектриком, изменяющая свою емкость по отношению к корпусу прибора от прикосновения к ней.
Под термином "корпус продолговатой формы" в рамках настоящей заявки понимается такой корпус, который имеет по одному измерению размер, в 4 и более раз превышающий размеры по двум другим измерениям. Примером такой формы является карандаш или пишущая ручка.
Под термином "горизонтальная плоскость" в рамках настоящей заявки понимается любая плоскость, перпендикулярная локальному вектору силы тяжести.
Под термином "вертикальная плоскость" в рамках настоящей заявки понимается любая плоскость, перпендикулярная любой горизонтальной плоскости.
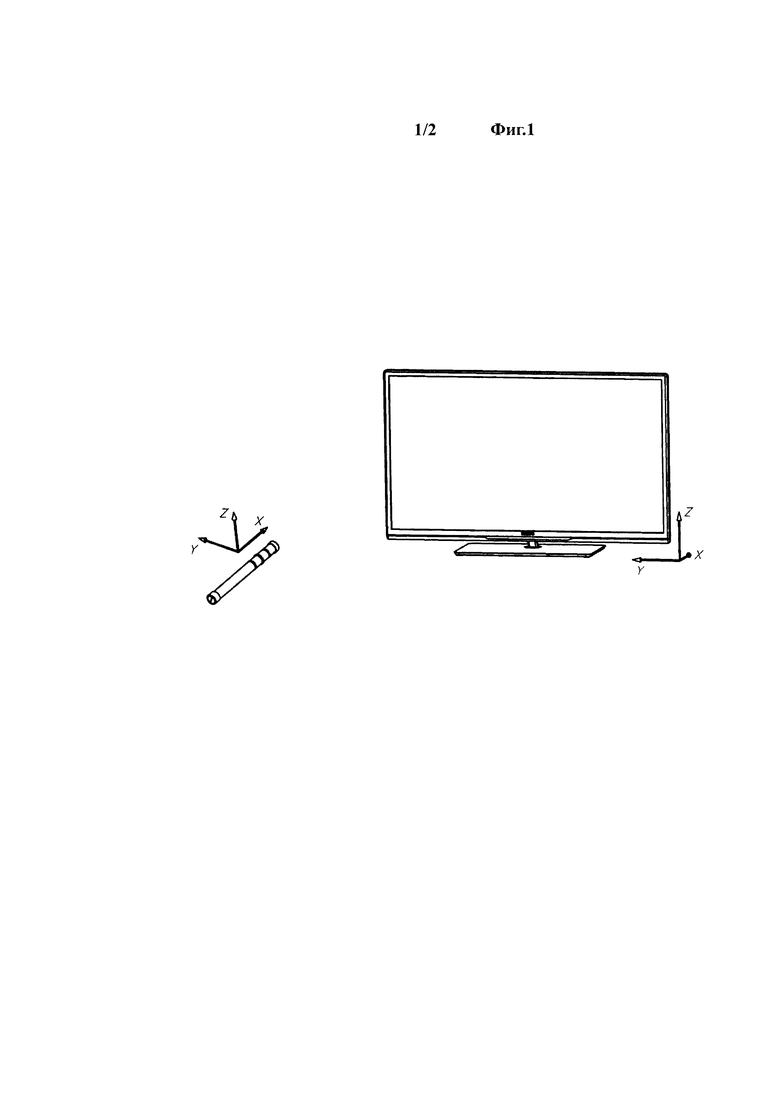
Под термином "продольная ось" в рамках настоящей заявки понимается ось системы координат, связанной с инерциальным устройством, обозначенная на фиг. 1 как X.
Под термином "функции управления" в рамках настоящей заявки понимаются различные варианты и режимы управления электронными системами.
Под термином "угловая скорость" в рамках настоящей заявки понимается величина, характеризующая скорость вращения материальных точек, из которых состоит твердое тело, вокруг оси вращения за единицу времени.
Под термином "ось вращения" в рамках настоящей заявки понимается прямая, перпендикулярная плоскостям, в которых материальные точки твердого тела в процессе вращения описывают круговые траектории.
Под термином "порог угловой скорости" в рамках настоящей заявки понимается заранее заданная величина модуля угловой скорости, при превышении которой меняется алгоритм работы прибора.
Под термином "модуль угловой скорости" в рамках настоящей заявки понимается величина угловой скорости без учета направления вращения.
Под термином "вертикальная ось" в рамках настоящей заявки понимается любая ось вращения, перпендикулярная горизонтальной плоскости.
Под термином "поверхность" в рамках настоящей заявки понимается любое твердое основание, необходимое для функционирования устройства дистанционного управления контактного типа. Например, для устройства типа мышь требуется основание, по которому мышь будет перемещаться в процессе работы.
Под термином "пользователь" в рамках настоящей заявки понимается человек, использующий инерциальное устройство или другое устройство дистанционного управления интерфейсом человек-компьютер.
Под термином "масштабные коэффициенты" в рамках настоящей заявки, понимаются числовые константы, линейно связывающие измеряемые инерциальным устройством угловые скорости и скорости перемещения курсора по экрану или скорость прокрутки и/или масштабирования объектов экранного интерфейса.
Устройство собрано в корпусе, материалом которого может быть металл, пластик, стекло, дерево или комбинация вышеперечисленных материалов.
В некоторых вариантах осуществления корпус может быть покрыт краской, например, soft touch или другим диэлектрическим покрытием.
Для управления режимами работы устройства могут быть предусмотрены емкостные сенсоры, расположенные на поверхности корпуса устройства.
В некоторых вариантах осуществления сенсоры имеют форму колец и могут быть расположены ближе к одному из концов корпуса устройства.
В некоторых вариантах осуществления один или несколько из сенсоров могут использоваться для включения устройства, например, устройство активируется при наличии контакта руки пользователя с одним из сенсорных датчиков прикосновения.
Устройство имеет возможность обнаруживать, когда пользователь прикасается к устройству. Это используется для того, чтобы исключить нежелательное управление курсором, в то время когда устройство не находится в руке. Устройство начинает работать только, когда находится в руке.
Некоторые реализации устройства оборудованы встроенным микрофоном, способным распознавать голосовые команды. Микрофон способен распознавать не только голос, но и характерные щелчки пальцами, «поцарапывание» и «поглаживание».
В некоторых вариантах осуществления устройство имеет несколько сенсоров прикосновения или нажатия. Для повышения эргономических свойств может быть предусмотрена тактильная обратная связь от срабатывания сенсоров, например вибрация. В некоторых вариантах осуществления устройство для этого содержит вибромотор.
В некоторых вариантах осуществления сенсорные датчики прикосновения используются для управления графическим интерфейсом.
В некоторых вариантах осуществления устройство предназначено для управления положением курсора, световой отметки или любого другого графического объекта, спроецированного на экран компьютера, планшета, смартфона, телевизора или любого другого устройства с графическим интерфейсом, путем свободного перемещения устройства в пространстве.
В роли контролируемых устройств могут выступать: персональные компьютеры, смартфоны, системы освещения, мультимедийные проекторы, автомобильные и стационарные аудиосистемы, телевизоры, игровые приставки, дистанционно управляемые игрушки и др.
В некоторых вариантах осуществления при наличии достаточного количества сенсоров устройство может реализовывать функции компьютерной мыши.
Для устройства, выполненного с возможностью погружения в воду, сенсоры управления могут быть выполнены в виде датчиков изменения геометрии поверхности корпуса или корпуса устройства.
В некоторых вариантах корпус выполнен герметичным с защитой от пыли, грязи, песка и воды. В некоторых вариантах устройство может быть выполнено в корпусе, позволяющем погружать устройство в воду.
Устройство содержит микропроцессор, производящий расчеты, необходимые для преобразования данных о движении устройства в команды управления электронной системой.
Устройство содержит канал передачи данных с устройства на управляемое посредством него электронное устройство.
В некоторых вариантах осуществления канал передачи данных является проводным, в других вариантах беспроводным, например, Bluetooth, радиоканалом или оптическим каналом. Предпочтительным вариантом является беспроводной канал, предпочтительно Bluetooth.
В некоторых вариантах осуществления корпус имеет продолговатую форму, например, продолговатого цилиндра, и по форме и размеру выполнен как средняя ручка или карандаш.
Устройство имеет источник питания, например батарею или аккумулятор. Батареей может быть любая батарея, подходящая по форме и размеру, например, AAA для формы пишущей ручки или карандаша.
В случае использования аккумуляторной батареи ее зарядка может производиться с использованием как проводных, так и беспроводных зарядных устройств.
В некоторых вариантах осуществления корпус устройства может иметь крепление или отверстие для крепления, позволяющие поставить устройство на стол, разместить в нагрудном кармане или носить на шее или запястье.
Некоторые параметры системы, а именно:
- порог угловой скорости по продольной оси корпуса для перехода в режим прокрутки
- интервал времени, в течение которого значение данной угловой скорости должно превышать пороговое значение для перехода в режим прокрутки,
- порог отклонения продольной оси корпуса от вертикального положения для перехода в режим прокрутки,
- порог возврата из режима прокрутки,
- интервал времени, в течение которого значение угловой скорости должно быть меньше порогового для возврата из режима прокрутки,
- масштабные коэффициенты пересчета угловых скоростей в перемещение курсора,
- масштабные коэффициенты пересчета угловых скоростей в скорость прокрутки могут быть настроены пользователем при помощи компьютерной программы, которая может быть поставлена вместе с устройством.
Программа для конфигурации может быть выполнена различными способами и иметь как графический, так и текстовый интерфейс.
Например, параметры могут задаваться в виде записей в текстовом файле конфигурации, где вышеперечисленным параметрам будут поставлены в соответствие числовые значения. Впоследствии программа будет считывать значения из данного файла и записывать в память инерциального устройства.
Возможен так же вариант программы конфигурации инерциального устройства с графическим интерфейсом. В этом случае параметры, управляющие режимами работы инерциального устройства, будут вводиться в соответствующих полях программы, а после завершения записываться в память командой.
Программное обеспечение может поставляться в комплекте с устройством на любом подходящем носителе или размещено на сервере компании-производителя для дальнейшего скачивания.
ПРИМЕР
На фиг. 2 представлено устройство, включающее:
1 - трехосевой MEMS-гироскоп,
2 - трехосевой MEMS-акселерометр,
3 - микропроцессор,
4 - Bluetooth-трансивер,
5 - источник питания,
6 - устройство тактильной обратной связи,
7-9 - сенсорные датчики прикосновения,
10 - корпус.
В качестве инерциальных датчиков используется микросхема трехосевого МЭМС гироскопа и акселерометра производства фирмы Maxim Integrated МАХ21100.
В качестве микропроцессора, используемого для проведения расчетов, используется микросхема ATSAMD21E18A производства фирмы Atmel, представляющая собой микромощный микроконтроллер на основе ядра ARM CortexMO.
Для построения радиоканала используется модуль LBCA2HNZYZ производства Murata, реализующий протокол Bluetooth Low Energy.
Питание устройства осуществляется от батарейки с напряжением 1.5 В или от NiMH аккумулятора формата AAA.
Сенсорные датчики прикосновения представляют собой покрытые непроводящей краской латунные кольца, присоединенные к емкостному контроллеру Q-Touch.
Для четкого обозначения срабатывания сенсорных датчиков используется включение на короткое время встроенного вибромотора.
Корпус прибора состоит из металлической тонкостенной трубки, покрашенной краской soft-touch, металлических колец датчиков прикосновения и нескольких пластмассовых деталей, служащих для соединения всех вышеперечисленных элементов.
Вращение устройства вокруг оси, назовем ее ось Z (см. фиг. 1), параллельной проекции вектора силы тяжести на плоскость, перпендикулярную продольной оси устройства, используется для перемещения курсора на экране компьютера влево и вправо. Вращение устройства вокруг оси, перпендикулярной оси Z и лежащей в плоскости, перпендикулярной продольной оси устройства, назовем ее Y, используется для перемещения курсора на экране компьютера вверх и вниз.
Вращение устройства вдоль его продольной оси, назовем ее X, со скоростью больше заранее заданного порога, независимо от ориентации устройства в инерциальном пространстве, переводит устройство в режим прокрутки.
Отображение перемещения устройства ввода в системе координат, связанной с экраном пользовательского интерфейса, происходит при помощи матрицы косинусов размерности 3×3, которая преобразует вектор из системы координат, связанной с рукой пользователя В, в систему координат, связанную с экраном L, по следующей формуле:
где
- mB обозначает вектор в системе координат, связанной с рукой (В);
- mL обозначает вектор в системе координат, связанной с экраном (L);
 - матрица косинусов преобразования из В в L.
- матрица косинусов преобразования из В в L.
Ниже используются следующие определения осей.
Продольную ось устройства будем называть X. Система координат экрана привязана к локальному горизонту, причем ось Z направлена вверх и сонаправлена с локальным вектором силы тяжести. В случае, если устройство находится в покое, акселерометр измеряет ускорение:
где
 - матрица косинусов преобразования из L в В;
- матрица косинусов преобразования из L в В;
 - вектор ускорения свободного падения в системе координат связанной с рукой;
- вектор ускорения свободного падения в системе координат связанной с рукой;
g - ускорение свободного падения;
И искомое преобразование координат будет заключаться в нормализации измеренных ускорений и составлении с их помощью матрицы направляющих косинусов:
 ,
,
где
a 1, а2, а3 - компоненты измеренного кажущегося ускорения свободного падения.
Далее выберем произвольно не диагональный элемент матрицы и обнулим его.
Для получения ортогональной второй строки скалярное произведение второй и третьей строки должно быть равно нулю.
Таким образом получим:
 ,
,
где k служит для нормализации второй строки. Векторное произведение второй и третьей строки дает первую строку.
Это преобразование используется для нахождения проекций угловой скорости, измеренной гироскопом устройства на оси системы координат, связанной с экраном интерфейса:
 ,
,
где
ωL - вектор угловой скорости в системе координат, связанной с экраном;
ωB - вектор угловой скорости в системе координат, связанной с рукой.
Проекция на ось Z используется для перемещения курсора вправо-влево, а на ось Y для перемещения вверх-вниз.
Тогда как угловая скорость по оси X используется для реализации дополнительных функций, таких как прокрутка и навигация по меню.
В положениях, когда ось X устройства отклонена от вертикали на угол меньше заданного пользователем, функция управления курсором отключается и устройство используется только для прокрутки или масштабирования.
При превышении модуля угловой скорости по оси X заранее заданного порога режим работы устройства изменяется. Перемещения курсора по экрану более не производится, а значение X угловой скорости используется для прокрутки или масштабирования объектов экрана. В случае, если значение угловой скорости находится ниже порогового значения в течение заданного промежутка времени, происходит возврат в режим управления положением курсора.
Устройство позволяет легко и эргономично управлять прокруткой (вверх и вниз) и/или масштабированием содержимого компьютерного экрана вращением устройства в свободном пространстве вокруг одной из осей, обычно продольной. Как только устройство начинает вращаться вокруг этой оси, это вращение измеряется гироскопом, и если угловая скорость превышает некоторый заранее определенный пользователем порог, включается специфическая функция (прокрутка/масштабирование). Назовем это «режим прокрутки».
В режиме прокрутки положение курсора «замораживается» и не изменяется даже при изменении положения устройства в пространстве. Когда скорость вращения устройства вокруг продольной оси снижается ниже предопределенного пользователем порога и находится в этом диапазоне в течение отрезка времени больше заданного, устройство возвращается в нормальный режим работы, в котором происходит управление положением курсора по двум осям.
Устройство может однозначно изменить положение курсора на экране слева-направо или вверх-вниз при вращении устройства пользователем в горизонтальной и/или вертикальной плоскостях.
Таким образом, устройство, преобразуя свою систему координат, обеспечивает то, что оси, поворот вокруг которых используется для перемещения курсора экранного интерфейса вверх-вниз и вправо-влево, всегда привязаны к положению горизонта, вне зависимости от поворота корпуса устройства вокруг своей продольной оси.
Вышеописанные свойства позволяют, кроме возможности держать устройство в руке, не обращая внимания на его поворот вокруг продольной оси, использовать этот поворот для управления экранным интерфейсом, например реализуя таким способом прокрутку или масштабирование объектов экрана посредством поворота устройства в руке пользователя или руки пользователя вместе с устройством.
Это обеспечивает точную быструю промотку страниц и отсутствие ошибок позиционирования экранного указателя, вызванных наклоном плоскостей поворота устройства по отношению к горизонту, и, таким образом, повышает точность дистанционного управления электронными системами при отсутствии опорной поверхности.
Описание примера осуществления настоящего изобретения предоставлено для иллюстративных и описательных целей. Оно не является исчерпывающим и не ограничивает изобретение описанными вариантами. Многие модификации и варианты очевидны для специалиста в данной области техники. Конкретные варианты осуществления выбраны и описаны для того, чтобы наилучшим образом объяснить принципы изобретения и его практические применения и, следовательно, обеспечить понимание изобретения в различных вариантах его осуществления и с его различными модификациями, подходящими для предполагаемого использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЕДЕНИЯ ДИАЛОГОВ С ВИРТУАЛЬНЫМИ ПЕРСОНАЖАМИ В ВИРТУАЛЬНОЙ СРЕДЕ | 2020 |
|
RU2747861C1 |
| СПОСОБ И СИСТЕМА ПОВЕДЕНЧЕСКОГО ПРОФИЛИРОВАНИЯ ПОЛЬЗОВАТЕЛЯ НА ОСНОВАНИИ АНАЛИЗА СИГНАЛОВ СЕНСОРОВ МОБИЛЬНОГО УСТРОЙСТВА | 2023 |
|
RU2825109C1 |
| Устройство регистрации двигательной активности | 2016 |
|
RU2663396C2 |
| ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ | 2007 |
|
RU2339543C1 |
| СПОСОБ ЭЛЕКТРОННОЙ СТАБИЛИЗАЦИИ ПОЛЕЙ ЗРЕНИЯ ПРИБОРОВ НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ ВОЕННЫХ ГУСЕНИЧНЫХ И КОЛЕСНЫХ МАШИН | 2020 |
|
RU2796212C2 |
| СПОСОБ ФОРМИРОВАНИЯ РЕГИОНАЛЬНЫХ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ИНФОРМАЦИИ И ТЕЛЕКОММУТАЦИОННАЯ ВОЗДУШНАЯ ПЛАТФОРМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2287910C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В МАЛОГАБАРИТНЫЙ ТЕРМИНАЛ, РАЗМЕЩАЮЩИЙСЯ В РУКЕ ПОЛЬЗОВАТЕЛЯ, В ЧАСТНОСТИ РАДИОТЕЛЕФОННУЮ ТРУБКУ, ПЕЙДЖЕР, ОРГАНАЙЗЕР | 2001 |
|
RU2201618C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЕРЧАТКИ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2017 |
|
RU2673406C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЕРЧАТКИ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ (ВАРИАНТЫ) | 2017 |
|
RU2670649C9 |
Группа изобретений относится к микроэлектронике. Технический результат – дистанционное управление электронными системами, обеспечивающее определение величины поворотов корпуса в горизонтальной и вертикальной плоскостях вне зависимости от угла, на который этот корпус повернут вокруг своей оси. Для это предложено инерциальное устройство, выполненное с возможностью определять величины поворотов корпуса устройства в горизонтальной и вертикальной плоскостях вне зависимости от угла, на который этот корпус повернут относительно своей продольной оси. Также описаны способы управления электронными системами с использованием инерциального устройства. 3 н. и 16 з.п. ф-лы, 2 ил., 1 пр.
1. Инерциальное устройство для дистанционного управления электронными системами, включающее:
- по меньшей мере один трехосевой MEMS-гироскоп,
- по меньшей мере один трехосевой MEMS-акселерометр,
- по меньшей мере один микропроцессор,
- по меньшей мере один канал передачи данных,
и источник питания, дополнительно включающее устройство тактильной обратной связи и по меньшей мере два сенсорных датчика прикосновения и заключенное в корпус продолговатой формы, которое, преобразуя свою систему координат, определяет величину поворотов указанного корпуса в горизонтальной и вертикальной плоскостях вне зависимости от угла, на который этот корпус повернут относительно своей продольной оси; выполненное с возможностью осуществлять часть функций управления при превышении значения угловой скорости по продольной оси корпуса выше заданной пользователем величины; а часть функций управления - в положениях продольной оси корпуса с отклонением от вертикального не более чем на заданную пользователем величину.
2. Устройство по п. 1, где корпус имеет форму продолговатого цилиндра.
3. Устройство по п. 1, где корпус выполнен в форме пишущей ручки или карандаша.
4. Устройство по п. 1, где один из сенсорных датчиков прикосновения используется для активации устройства.
5. Устройство по п. 4, где устройство активируется при наличии контакта руки пользователя с одним из сенсорных датчиков прикосновения.
6. Устройство по п. 1, где устройство обратной связи представляет собой вибромотор.
7. Устройство по п. 1, где канал передачи данных является беспроводным.
8. Устройство по п. 7, где беспроводной канал представляет собой Bluetooth.
9. Устройство по п. 1, где сенсорные датчики прикосновения используются для управления графическим интерфейсом.
10. Устройство по п. 1, где часть функций управления, которая может осуществляться при превышении значения угловой скорости по продольной оси корпуса выше заданной пользователем величины, представляет собой прокрутку.
11. Устройство по п. 1, где часть функций управления, которая может осуществляться в положениях продольной оси корпуса с отклонением от вертикального не более чем на заданную пользователем величину, представляет собой прокрутку.
12. Устройство по п. 1, где часть функций управления, которая может осуществляться при превышении значения угловой скорости по продольной оси корпуса выше заданной пользователем величины, представляет собой масштабирование.
13. Устройство по п. 1, где часть функций управления, которая может осуществляться в положениях продольной оси корпуса с отклонением от вертикального не более чем на заданную пользователем величину, представляет собой масштабирование.
14. Способ дистанционного управления электронными системами с использованием инерциального устройства, включающего:
- по меньшей мере один трехосевой MEMS-гироскоп,
- по меньшей мере один трехосевой MEMS-акселерометр,
- по меньшей мере один микропроцессор,
- по меньшей мере один канал передачи данных,
и источник питания, дополнительно включающего устройство тактильной обратной связи и по меньшей мере два сенсорных датчика прикосновения и заключенного в корпус продолговатой формы, включающий преобразование системы координат, определение величины поворотов корпуса устройства в горизонтальной и вертикальной плоскостях вне зависимости от угла, на который этот корпус повернут относительно своей продольной оси и дистанционную передачу данных; где часть функций управления может осуществляться при превышении значения угловой скорости по продольной оси корпуса выше заданной пользователем величины; часть функций управления может осуществляться в положениях продольной оси корпуса с отклонением от вертикального не более, чем на заданную пользователем величину и где управление не требует поверхности.
15. Способ по п. 14, где электронная система выбрана из группы, включающей ПК, мультимедийный проектор, телевизор, игровую приставку, систему виртуальной или дополненной реальности, дистанционно управляемую игрушку, музыкальную систему, систему освещения и т.д.
16. Способ по п. 15, где часть функций управления, которая может осуществляться при превышении значения угловой скорости по продольной оси выше заданной пользователем величины, представляет собой прокрутку или переключение страниц, масштабирование изображения, текста, окна программы; увеличение или уменьшение уровня звука, освещенности или изменение параметров движения.
17. Способ дистанционного управления электронными системами с использованием инерциального устройства, включающего:
- по меньшей мере один трехосевой MEMS-гироскоп,
- по меньшей мере один трехосевой MEMS-акселерометр,
- по меньшей мере один микропроцессор,
- по меньшей мере один канал передачи данных,
и источник питания, дополнительно включающего устройство тактильной обратной связи и по меньшей мере два сенсорных датчика прикосновения и заключенного в корпус продолговатой формы, включающий преобразование системы координат, определение величины поворотов корпуса устройства в горизонтальной и вертикальной плоскостях вне зависимости от угла, на который этот корпус повернут относительно своей продольной оси, и дистанционную передачу данных; где функция управления частью параметров указанной электронной системы осуществляется при превышении значения угловой скорости по продольной оси корпуса устройства выше заданной пользователем величины и где управление не требует поверхности.
18. Способ по п. 17, где электронная система выбрана из группы, включающей ПК, мультимедийный проектор, телевизор, игровую приставку, систему виртуальной или дополненной реальности, дистанционно управляемую игрушку, музыкальную систему, систему освещения и т.д.
19. Способ по п. 18, где часть функций управления, которая может осуществляться при превышении значения угловой скорости по продольной оси выше заданной пользователем величины, представляет собой прокрутку или переключение страниц, масштабирование изображения, текста, окна программы; увеличение или уменьшение уровня звука, освещенности или изменение параметров движения.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| WO 2013032410 A1, 07.03.2013 | |||
| US 8830172 B2, 09.09.2014 | |||
| 0 |
|
SU80036A1 | |
| РУЧКА ДЛЯ РУКОПИСНОГО ВВОДА ДАННЫХ В КОМПЬЮТЕР | 2001 |
|
RU2235362C2 |

