Настоящее изобретение относится к аэрокосмическим аппаратам или самолетам, а также авионике как средству управления такими летательными аппаратами, а конкретнее к способу и системе для автоматического управления самолетом в случае недееспособности экипажа.
Уровень техники
При некоторых обстоятельствах экипаж или пилоты самолета могут стать недееспособными и не могут управлять самолетом. Одним из примеров, когда экипаж становится недееспособным, может быть разгерметизация кокпита или кабины самолета на высоте, где экипажу необходим кислород, или недостаток кислорода в кокпите или кабине, вызванный некоторыми другими причинами. Гипоксия или недостаток кислорода вызывает снижение дееспособности экипажа и, в конечном итоге, экипаж теряет сознание. При таких обстоятельствах требуется возможность снижения самолета до высоты, где имеется достаточно кислорода для поддержания жизни человека и обеспечения возможного восстановления экипажа, а также возможность безопасного полета самолета, пока экипаж является недееспособным.
Другим примером, когда экипаж может стать недееспособным, является управление самолетом пилотом, не имеющим допуска, или другие противоправные действия экипажа. При таком сценарии полет самолета может происходить неуправляемо с нарушением безопасности или может быть направлен в другой пункт назначения, отличный от запрограммированного или указанного в плане полета. При таких обстоятельствах необходимо восстановить управление самолетом и направить его в безопасное место, где риск повреждения другого самолета или объектов на земле минимален или отсутствует.
Сущность изобретения
В одном варианте осуществления управление самолетом может автоматически взять на себя бортовая система, когда определено отсутствие эвристического поведения члена экипажа или пилота, или когда самолет, по всей видимости, неуправляем или летит непредсказуемым образом или в непредусмотренном направлении. Управление неконтролируемым или непредсказуемым образом возможно либо из-за того, что экипаж может страдать от недостатка кислорода или гипоксии; либо из-за того, что управление самолетом мог взять на себя не имеющий допуска пилот, либо по какой-то другой причине. Если система обнаружит, что самолет не управляется предсказуемым образом (нет ввода данных или необычный ввод данных), система может затребовать от пилота или экипажа ответа на сигнал тревоги, сообщение или другое воздействие. Если надлежащий ответ, такой как код системы безопасности или пароль не получен, система может автоматически принять на себя управление самолетом. Система также может передать информацию или предопределенное сообщение для оповещения наземной станции, такой как авиадиспетчерская служба, диспетчерская вышка или другой объект, о том, что самолет управляется автоматической системой. В случае не имеющего допуска пилота или правонарушений штатного экипажа, если попытки управления приводят к неустойчивому полету самолета или полету в пункт назначения, отличный от запрограммированного или соответствующего плану полета, система запросит ввести перекрывающий код. В случае гипоксии система автоматического управления самолетом подключается к органам управления полетом и к автомату управления тягой двигателя и использует блок облета рельефа местности для снижения до такого уровня высоты, когда кислорода достаточно для существования человека и возможно восстановление экипажа. Система также может направить самолет к ближайшему аэропорту или месту приземления. Система может дать сигнал аэродромной диспетчерской вышке и кружить над пунктом назначения. Если экипаж не отвечает, самолет может быть направлен в безопасное место, такое как океан или другая пустынная область, во избежание повреждения самолета при столкновении с землей до полной выработки топлива.
В одном варианте осуществления способ автоматического управления самолетом в случае недееспособности экипажа может включать определение любой недееспособности экипажа. Способ также может включать передачу сообщения, требующего подтверждения от экипажа, по факту определения недееспособности экипажа. Способ может дополнительно включать в себя подачу команды автопилоту на управление самолетом по факту отсутствия подтверждения от экипажа.
По другому варианту осуществления бортовая система автоматического управления самолетом в случае недееспособности экипажа может содержать процессор и программный модуль, исполняемый процессором, для автоматического управления самолетом в случае недееспособности экипажа. Модуль может быть настроен на определение любой недееспособности экипажа и передачу сообщения, требующего подтверждение от экипажа, по факту определения недееспособности экипажа управлять самолетом. Бортовая система также может включать в себя автопилот для управления самолетом по факту отсутствия подтверждения от экипажа.
По другому варианту осуществления компьютерный программный продукт для автоматического управления самолетом в случае недееспособности экипажа может включать в себя машиночитаемый запоминающий носитель. Машиночитаемый запоминающий носитель может содержать в себе машиночитаемый программный код. Машиночитаемый программный код может включать в себя машиночитаемый программный код, настроенный на определение любой недееспособности экипажа. Машиночитаемый программный код может включать в себя машиночитаемый программный код, настроенный на передачу сообщения, требующего подтверждение от экипажа, по факту определения недееспособности экипажа. Машиночитаемый программный код может дополнительно включать в себя машиночитаемый программный код, настроенный на подачу команды автопилоту на управление самолетом по факту отсутствия подтверждения от экипажа.
Другие объекты и признаки настоящего изобретения, определяемые исключительно формулой изобретения, станут понятны специалистам в этой области техники при рассмотрении следующего неограничительного подробного описания изобретения в сочетании с прилагаемыми чертежами.
Краткое описание чертежей
Следующее подробное описание вариантов осуществления содержит ссылки на прилагаемые чертежи, на которых показаны конкретные варианты осуществления настоящего изобретения. Другие варианты осуществления с другими структурами и операциями не выходят за рамки объема настоящего изобретения.
На фиг.1А и 1Б (вместе фиг.1) показана схема последовательности операций представленного в качестве примера способа автоматического управления самолетом в случае недееспособности экипажа по одному варианту осуществления настоящего изобретения.
На фиг.2 показана блок-схема примера бортовой системы для автоматического управления самолетом в случае недееспособности экипажа по одному варианту осуществления настоящего изобретения.
На фиг.3 показан пример кабинного индикатора, показывающего управление с блокировкой автоматики или автоматическое управление самолетом в случае недееспособности экипажа по одному варианту осуществления настоящего изобретения.
На фиг.4 показан пример кабинного индикатора, показывающего сообщение для подтверждения экипажем возобновления управления самолетом по одному варианту осуществления настоящего изобретения.
Подробное описание
В следующем подробном описании вариантов осуществления представлены ссылки на прилагаемые чертежи, на которых показаны конкретные варианты осуществления настоящего изобретения. Другие варианты осуществления с другими структурами и операциями не выходят за рамки объема настоящего изобретения.
Как очевидно для специалистов в этой области, настоящее изобретение может быть осуществлено в виде способа, системы или компьютерного программного продукта. Соответственно, настоящее изобретение может быть в виде полностью аппаратного варианта осуществления, полностью программного варианта осуществления (включая встроенные программы, резидентное программное обеспечение, набор микрокоманд и т.д.) или варианта осуществления, сочетающего программные и аппаратные аспекты, которые в основном могут быть упомянуты, как "схема", "модуль" или "система". Кроме того, настоящее изобретение может быть в виде компьютерного программного продукта, заключенного на одном или более машиночитаемом запоминающем носителе(ях) со встроенным машиночитаемым программным кодом.
Может быть использована любая комбинация одного или более машиночитаемых носителей. Машиночитаемый носитель может представлять собой машиночитаемый сигнальный носитель или машиночитаемый запоминающий носитель. Машиночитаемый запоминающий носитель может представлять собой, например, электронную, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему, аппарат или устройство или любую подходящую комбинацию вышеуказанного, но не ограничиваться ими. Более конкретные примеры (неполный список) машиночитаемых носителей включают следующее: электрическую схему с одной или более цепями, дискету для переносного компьютера, жесткий диск, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), электрически перепрограммируемое постоянное запоминающее устройство (ЭППЗУ или флэш-память), оптическое волокно, портативное ПЗУ на компакт-диске (CD-ROM), оптическое устройство хранения, магнитное устройство хранения или любую подходящую комбинацию вышеуказанных устройств. В контексте настоящего документа машиночитаемый запоминающий носитель может представлять собой любой материальный носитель, который может содержать или хранить программу для использования посредством или в соединении с системой, аппаратом или устройством для исполнения команд.
Машиночитаемый сигнальный носитель может включать в себя проходящий информационный сигнал с машиночитаемым программным кодом, например, при немодулированной передаче или как часть несущей. Такой проходящий сигнал может принимать любую из множества форм, включая электромагнитный, оптический или любую их подходящую комбинацию, но не ограничиваться ими. Машиночитаемый сигнальный носитель может представлять собой любой машиночитаемый носитель, который не является машиночитаемым запоминающим носителем, и который может сообщать, передавать или пересылать программу для использования посредством или в соединении с системой, аппаратом или устройством для исполнения команд.
Программный код, встроенный в машиночитаемый запоминающий носитель, может быть передан с помощью любого подходящего носителя, включая беспроводную связь, проводную связь, оптический волоконный кабель, РЧ-связь и т.д. или любую их подходящую комбинацию, но не ограничиваться этим.
Компьютерный программный код для выполнения операций для объектов настоящего изобретения может быть записан на любой комбинации одного или более языков программирования, включая язык объектно-ориентированного программирования, такой как Java, Smalltalk, C++ или аналогичный им и обычные языки процедурного программирования, такие как язык программирования "C" или аналогичные языки программирования. Программный код может быть исполнен полностью на компьютере пользователя, частично на компьютере пользователя, в качестве отдельного программного пакета, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. При последнем сценарии удаленный компьютер может быть соединен с компьютером пользователя посредством сети любого типа, включая локальную вычислительную сеть (LAN) или глобальную вычислительную сеть (WAN), или соединение может быть осуществлено с внешним компьютером (например, через Internet с помощью провайдера сети интернет).
Объекты настоящего изобретения описаны далее со ссылкой на схему последовательности операций и/или блок-схемы способов, аппаратов (систем) и компьютерных программных продуктов по вариантам осуществления настоящего изобретения. Очевидно, что каждый блок схемы последовательности операций и/или блок-схем, а также комбинации блоков схемы последовательности операций и/или блок-схем могут быть выполнены посредством команд компьютерной программы. Эти команды компьютерной программы могут быть предусмотрены для процессора компьютера общего назначения, компьютера специального назначения или другого программируемого аппарата для обработки данных, чтобы создать такую машину, в которой команды при исполнении их процессором компьютера или другого программируемого устройства обработки данных, создавали средство выполнения функций/действий, указанных в блоке или блоках схемы последовательности операций и/или блок-схемы.
Эти команды компьютерной программы также могут быть сохранены на машиночитаемом носителе, который управляет компьютером, другим программируемым устройством для обработки данных или другими устройствами для функционирования таким образом, чтобы команды, сохраненные на машиночитаемом запоминающем носителе, создавали продукт, включающий команды, которые исполняют функцию/действие, указанную в блоке или блоках схемы последовательности операций и/или блок-схемы.
Команды компьютерной программы также могут быть загружены на компьютер, другой программируемый аппарат для обработки данных или другие устройства, чтобы привести к выполнению серии рабочих шагов на компьютере, другом программируемом аппарате или других устройствах для выполнения осуществляемого на компьютере процесса и чтобы команды, которые исполняются на компьютере или другом программируемом аппарате, обеспечивали процессы для осуществления функций/действий, указанных в блоке или блоках схемы последовательности операций и/или блок-схемы.
На фиг.1А и 1Б (вместе фиг.1) показана схема последовательности операций примера способа 100 для автоматического управления самолетом в случае недееспособности экипажа по одному варианту осуществления настоящего изобретения. В блоке 102 определение может быть выполнено независимо от того, осуществляется ли ручное управление самолетом экипажем или пилотом, или управление самолетом осуществляется через автопилот. Если экипаж вручную управляет самолетом, способ 100 может осуществить переход в блок 104. В блоке 104 присутствие активного экипажа может быть определено посредством эвристических индикаторов полетных данных. Эвристические индикаторы полетных данных могут без ограничения включать в себя нормальные, или обычные и ожидаемые отклонения органов управления, когда самолет управляется человеком, такие как, например, манипулирование рычагом или штурвалом самолета при управлении элеронами, рулем высоты или другими системами управления полетом, перемещение педалей ножного управления для управления перемещением руля и любые другие действия, которые могут быть предприняты пилотом или вторым пилотом при управлении самолетом вручную. Эти эвристические индикаторы могут быть запрограммированы в системе и способе 100 и сравниваться с фактическими действиями пилота или второго пилота для определения присутствия активного экипажа или пилота.
Определение присутствия активного экипажа также может включать определение того, управляет ли самолетом имеющий допуск пилот или экипаж, или имеется некоторая другая недееспособность или расстройство экипажа или пилота. Например, способ 100 может определять экстремальное, нехарактерное или неэвристическое управление самолетом, траекторию или направление полета, отличные от запрограммированного или запланированного полета или другие аномальные летные характеристики или поведение. Могут быть определены различные летные характеристики, превышающие предопределенные или заданные значения. Летные характеристики могут быть определены различными датчиками и сравниваться с эвристическим данными или индикаторами. Примеры различных летных характеристик, которые могут быть зарегистрированы и оценены для определения присутствия активного экипажа и имеющего допуск экипажа, могут включать, но необязательно ограничиваться этим, крен и скорость крена самолета, тангаж и скорость тангажа самолета, рыскание и скорость рыскания самолета, высоту, направление и скорость самолета, конфигурацию самолета и диапазонов данных, относящиеся к эксплуатационным границам, допускам или другим спецификациям самолета для различных маневров или других действий. Любые из этих различных летных характеристик, находящиеся за пределами нормы, или нехарактерные или превышающие установленные пределы или значения, могут указывать на возможность не имеющего допуск пилота или недееспособного пилота.
В блоке 106 определение может быть выполнено независимо от того, присутствует ли активный экипаж, управляющий самолетом вручную, на основе параметров и определений в блоке 104. Если определено, что присутствует активный экипаж, способ 100 может осуществить возврат к блоку 104. Если определено, что активный экипаж отсутствует, способ 100 может осуществить переход в блок 110.
В блоке 108 определение может быть выполнено независимо от того, управляет ли самолетом не имеющий допуска пилот или недееспособный пилот, или произошли ли другие необычные или экстремальные действия или поведение, на основе анализа в блоке 104. Если в блоке 108 определено, что возможно управление не имеющим допуска пилотом, способ 100 может осуществить переход в блок 110. В противном случае в способе 100 возможен возврат к блоку 104.
В блоке 110 для пилота или экипажа может быть предусмотрено сообщение, сигнал тревоги или другое управляющее воздействие. Сообщение или сигнал тревоги может быть представлен на индикаторе в кокпите, таком как индикатор, связанный с электронной системой бортовой документации (EFB), индикатор, связанный с бортовой ЭВМ системы управления полетом (FMC) или другой индикатор кокпита. Сообщение или сигнал тревоги может потребовать от пилота или экипажа подтверждения присутствия и способности управления самолетом. Сообщение или сигнал тревоги может потребовать, чтобы экипаж или пилот ввел код системы безопасности или пароль, который должен быть известен только имеющему допуск пилоту или члену экипажа. В блоке 112 определение может быть выполнено независимо от того, введено ли в систему подтверждение или правильный код системы безопасности или пароль. Если в блоке 112 получено подтверждение или правильный код, то способ 100 может осуществить возврат в блок 104.
Возвращаясь к блоку 102, если в блоке 102 определено, что самолетом управляет автопилот, способ 100 позволяет осуществить переход в блок 114. В блоке 114 могут контролироваться параметры полета и параметры среды в кокпите или кабине, а также любые другие параметры для определения нормального управления самолетом. Любое экстремальное или неэвристическое управление самолетом, аналогичное описанному в блоке 104, также может быть оценено в блоке 114, чтобы обнаружить возможного не имеющего допуска пилота или экстремальное или недопустимое управление самолетом. Любая потеря давления кабины или кокпита также может быть обнаружена в блоке 114. Регистрация потери давления может включать регистрацию снижения давления быстрее предопределенной скорости.
Аналогично описанному выше, в блоке 108 может быть определено, возможно ли управление самолетом не имеющим допуск пилотом, или имеет ли место другое нештатное или экстремальное управление самолетом. Если нет, то способ 100 может осуществить возврат в блок 114. Если в блоке 108 определено, что возможно управление самолетом не имеющим допуска пилотом, способ 100 позволяет осуществить переход в блок 110, функции блока 110 могут быть выполнены аналогично описанному выше и у пилота запросят ввести код системы безопасности или пароль, чтобы предотвратить управление с блокировкой автоматики или восстановить управление самолетом.
В блоке 116 определение может быть выполнено независимо от того, обнаружена ли потеря давления в блоке 114. Если потеря давления не обнаружена, то способ 100 может осуществить возврат в блок 114. Если в блоке 116 обнаружена потеря давления, способ 100 позволяет осуществить переход в блок 110, и функции блока 110 могут быть выполнены. Если в блоке 112 определено, что подтверждение или код системы безопасности или пароль приняты, то способ 100 может осуществить возврат в блок 114 и способ 100 может быть осуществлен, как указано выше. Если подтверждение или правильный код системы безопасности или пароль не приняты в блоке 112, способ 100 позволяет осуществить переход в блок 118.
В блоке 118 может быть включено управление с блокировкой автоматики и может быть дана команда на управление самолетом через автопилот. Автопилоту может быть дана команда осуществить полет в заданном эшелоне и снизить высоту до запрограммированной. Например, запрограммированная высота может быть высотой менее около 10000 футов или высотой, на которой достаточно кислорода для дыхания экипажа без какого-либо вспомогательного или дополнительного кислорода, и на которой возможно восстановление экипажа страдающего от гипоксии. Пример индикатора 300, который может быть представлен в кокпите самолета для индикации управления с блокировкой автоматики и индикации того, что управление самолетом осуществляется через автопилот, приведен далее более подробно со ссылкой на фиг.3.
В блоке 120 сообщение или сигнал связи может быть автоматически передан на наземную станцию, такую как управление воздушными линиями, авиадиспетчерская служба или другой объект. Сообщение или сигнал связи может позволить направить другой самолет мимо потенциальной траектории полета самолета.
В блоке 122 автопилот может инициировать управляемое снижение до ближайшего места приземления или аэропорта. В блоке 124 автопилот может автоматически ввести самолет в схему полета в зоне ожидания на выбранной высоте по факту достижения места приземления или аэропорта.
В блоке 126 для экипажа может быть предусмотрено другое сообщение или сигнал тревоги. Сообщение или сигнал тревоги может потребовать от экипажа подтверждения присутствия и способности возобновить управление самолетом. Сообщение также может потребовать ввода кода безопасности системы или пароля для подтверждения того, что управление самолетом будет возобновлено имеющим допуск пилотом.
В блоке 128 возможно определение того, что подтверждение было получено и/или правильный код системы безопасности или пароль был введен для возобновления управления самолетом. Пример индикатора 400, содержащего сообщение или сигнал тревоги, требующий от экипажа подтверждения присутствия и ввода кода безопасности системы или пароля, показан на фиг.4. В любой момент во время операций, связанных с блоками 122, 124 и 126, в блоке 128 пилот или экипаж могут подтвердить присутствие и могут возобновить управление самолетом, введя соответствующий код системы безопасности или пароль.
Если выполнено определение в блоке 128 и получено подтверждение или правильный код системы безопасности, способ 100 может осуществить возврат в блок 104, и способ 100 может быть осуществлен аналогично описанному выше. Если подтверждение или правильный код системы безопасности не получен в блоке 128, способ 100 позволяет осуществить переход в блок 130. В блоке 130 могут быть определены ближайшая безопасная зона во избежание повреждения при столкновении с землей и время полета. Затем управление самолетом в безопасной зоне до полной выработки топлива может осуществляться через автопилот. Безопасная зона может быть над океаном или над какой-либо пустынной территорией.
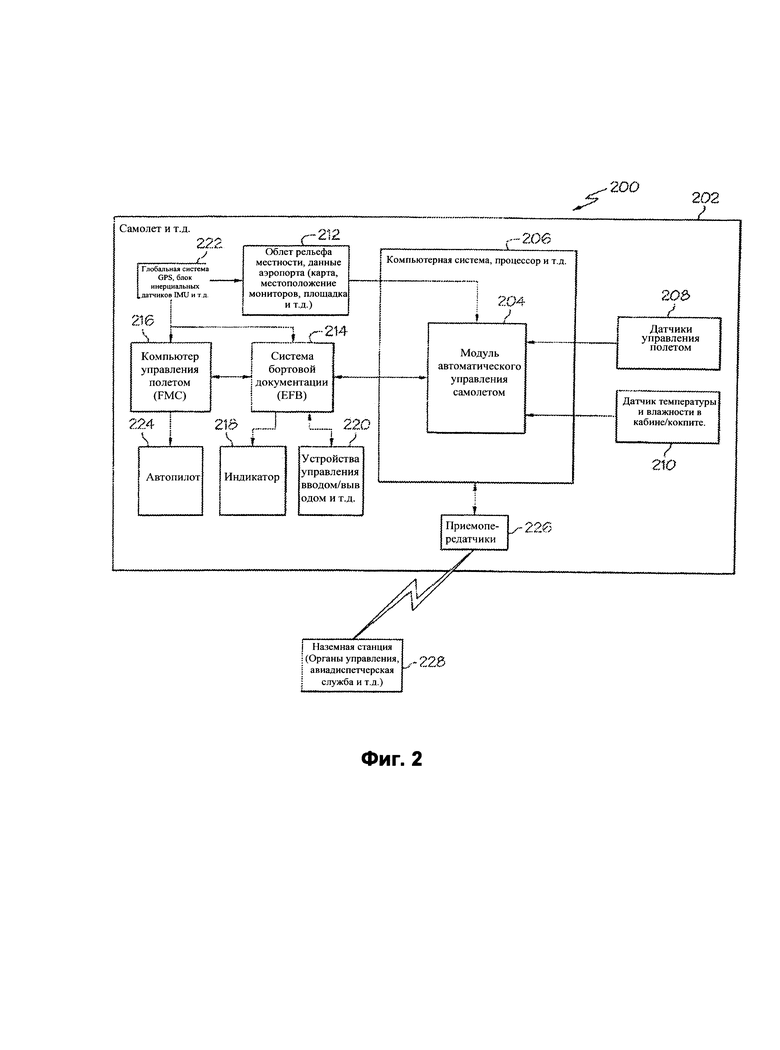
На фиг.2 показан пример структурной блок-схемы системы 200 на борту самолета 202 для автоматического управления самолетом 202 в случае недееспособности экипажа по одному варианту осуществления настоящего изобретения. Способ 100 может быть осуществлен в системе 200. Система 200 может включать модуль для автоматического управления самолетом 202. Модуль 204 автоматического управления может быть сохранен и/или функционировать в компьютерной системе 206 или процессоре. Некоторые или все признаки способа 100 могут быть воплощены и осуществлены модулем 204 автоматического управления. Компьютерная система 206 может быть расположена или смонтирована в самолете 202.
Модуль 204 автоматического управления может принимать данные от датчиков 208 системы управления полетом и датчиков 210 среды в кабине/кокпите. Датчики 208 системы управления полетом могут регистрировать любое предельное или беспорядочное действие органов управления полетом самолета аналогично описанному выше. Датчики 210 среды в кабине/кокпите могут регистрировать любую потерю давления кабины.
Модуль 204 автоматического управления также может принимать информацию или данные от блока облета рельефа местности или блока 212. Блок облета рельефа местности или блок 212 также может включать данные аэропорта и может включать карты географической области вдоль потенциальной траектории полета до ближайшего аэропорта или места приземления.
Модуль 204 автоматического управления также может осуществлять связь или может быть ведущим узлом электронной системы 214 бортовой документации (EFB). EFB 214 представляет собой электронное устройство управления информацией, которое может быть предусмотрено на борту самолета, чтобы помочь экипажу выполнять задания по управлению полетом проще и более эффективно. EFB 214 может представлять собой компьютер общего назначения или вычислительную платформу, предназначенную для сокращения или замены справочных материалов на бумажной основе, ранее содержавшихся в системе бортовой документации пилота. Такие материалы могут включать руководство по управлению самолетом, руководство для летного экипажа, аэронавигационные карты, включая карты для воздушных и наземных операций и другие материалы по управлению полетом. EFB 214 содержит электронные движущиеся карты для наземных и воздушных операций. Кроме того, EFB 214 может быть ведущим узлом программных приложений для конкретных целей, чтобы автоматически выполнять другие операции обычно или ранее выполнявшиеся вручную пилотом, такие как выполнение расчетов взлета и других связанных с полетом задач.
EFB 214 может быть присоединена к бортовой ЭВМ системы 216 управления полетом (FMC). FMC 216 и EFB 214 могут обеспечивать ключевые эксплуатационные параметры самолета и двигателя для модуля 204 автоматического управления, чтобы поддерживать автоматическое управление самолетом, как указано в настоящем документе. FMC 216 может быть частью или встроена в компьютерную систему 206, или модуль 204 автоматического управления самолетом может работать в FMC 216, а не в системе, содержащей отдельную компьютерную систему 206, как показано в примере по фиг.2.
Индикатор 218 и устройства или средства 220 управления вводом/выводом могут быть связаны с EFB 214 или отдельным индикатором, и органы управления могут быть связаны с модулем 204 автоматического управления.
Глобальная система 222 определения местоположения (GPS), блок инерциальных датчиков (IMU) или другое устройство могут обеспечивать информацией о географическом положении FMC 216 и EFB 214 для использования при автоматическом управлении самолетом 202.
Автопилотом 224 можно управлять через FMC 216 посредством модуля 204 автоматического управления, или автопилотом 224 можно управлять напрямую посредством модуля 204 автоматического управления.
Приемопередатчик 226 может быть присоединен к компьютерной системе 206 для связи с наземной станцией и для передачи каких-либо автоматических сообщений аналогично описанному в настоящем документе в отношении самолета, управляемого на автопилоте 224 или в режиме управления с блокировкой автоматики в случае недееспособности экипажа, как указано в настоящем документе.
На фиг.3 показан пример кабинного индикатора 300, показывающего управление с блокировкой автоматики или автоматическое управление самолетом в случае недееспособности экипажа по одному варианту осуществления настоящего изобретения. Индикатор 300 может быть использован в качестве индикатора 218 на фиг.2 и может быть связан с EFB. Индикатор 300, представляющий собой экран 302 управления с блокировкой автоматики, может предоставлять информацию, связанную с управлением с блокировкой автоматики или с автоматическим управлением самолетом через автопилот. Например, экран 302 управления с блокировкой автоматики может содержать первый список 304, показывающий возможные причины управления с блокировкой автоматики или автоматического управления самолетом через автопилот, и второй список возможных действий 306 и текущего состояния 308, связанного с каждым действием 306.
Примеры возможных причин 304, которые могут быть показаны для управления с блокировкой автоматики, приведенные на фиг.3, включают "Sudden Depressurization" (Резкое падение давления), "Sudden Pitch, Roll, Yaw" (Резкий крен, тангаж, рыскание), "Sudden Altitude loss" (Резкую потерю высоты), "Lack of Human Action" (Отсутствие действий человека) и "Pilot Request" (Запрос пилота). Эти возможные причины являются лишь иллюстративными примерами, и другие возможные описания причин для управления с блокировкой автоматики или автоматического управления самолетом могут быть использованы в дополнение к возможным причинам. Причина, зарегистрированная для текущего управления с блокировкой автоматики, может быть подсвечена некоторым образом, чтобы экипаж мог легко увидеть и отличить ее от других причин возможного управления с блокировкой автоматики. Например, текущая причина может быть выделена жирным шрифтом и/или может быть другого цвета, чтобы она выделялась среди других перечисленных причин управления с блокировкой автоматики.
Примеры возможных действий 306, которые могут быть предприняты во время управления с блокировкой автоматики, показанные на фиг.3, могут быть совместными "Alert Base and Engage Auto Pilot" (Предупредить базу и включить автопилот), "Descend to <10,000 ft AGL" (Снижение до высоты <10000 футов над уровнем земли), "Proceed to waypoint" (Перейти к промежуточной точке маршрута), "Holding pattern" (Перейти в схему полета в зоне ожидания) и "Await crew or ditch" (Ожидать экипаж или совершить вынужденную посадку на воду). Текущее действие 306 может быть высвечено или иным образом отличаться от других действий в списке для наглядности и легкого распознавания экипажем. Например, текущее действие может быть выделено жирным шрифтом и/или может быть другого цвета. Кроме того, состояние 308, связанное с текущим действием может быть показано посредством надписи "Current Action" (Текущее действие), как показано на фиг.3, перед действием "Descend to <10,000 ft AGL". Примерами других состояний действий могут быть "Completed" (Завершено) и "Queue Action" (Ожидание действия).
Экран 300 управления с блокировкой автоматики также может содержать блок 310, которым можно управлять для возврата к PW экрану или экрану возобновления управления самолетом имеющим допуск экипажем или пилотом.
На фиг.4 показан пример кабинного индикатора 400, показывающего экран 402, чтобы экипаж мог подтвердить и возобновить управление самолетом по одному из вариантов осуществления настоящего изобретения. Экран 402 может содержать первую область 404 для сообщения о включении управления с блокировкой автоматики. Первая область 404 может также содержать сообщение о необходимости введения пароля для возобновления управления. Индикатор 400 также может включать блок 406 для ввода пароля или кода системы безопасности. Блок 406 для ввода пароля может представлять собой сенсорную клавиатуру или клавиатуру на экране 402, аналогичную показанной на фиг.4, или может представлять собой существующую клавиатуру или клавишную панель или любой другой подходящий механизм. Пароль для возобновления управления самолетом затем может быть введен на клавиатуре или клавишной панели 406 членом экипажа. Когда член экипажа вводит пароль, то этот пароль может появиться во второй области 408 на экране 402 для верификации членом экипажа.
Схема последовательности операций и блок-схемы на чертежах показывают структуру, функциональные особенности и управление возможными вариантами осуществления систем, способов и компьютерных программных продуктов по настоящему изобретению. С этой точки зрения каждый блок схемы последовательности операций или блок-схем может представлять собой модуль, сегмент или часть кода, который содержит одну или более исполняемых команд для выполнения указанной логической функции(й). Также следует отметить, что в некоторых альтернативных вариантах осуществления отмеченные в блоке функции могут быть осуществлены не в порядке, отмеченном на чертежах. Например, два блока, показанные последовательно, в действительности могут быть выполнены по существу одновременно, или блоки иногда могут быть выполнены в обратном порядке, в зависимости от связанной с ними функциональной особенности. Также следует отметить, что каждый блок представленных блок-схем и/или схемы последовательности операций и комбинации блоков представленных блок-схем и/или схемы последовательности операций могут быть выполнены системами аппаратного обеспечения специального назначения для выполнения указанных функций или действий или комбинацией аппаратного обеспечения специального назначения и программных команд.
Терминология, используемая в настоящем документе, предназначена только для целей описания конкретных вариантов осуществления и не подразумевает ограничения настоящего изобретения. Используемые в настоящем документе формы единственного числа подразумевают включение также форм множественного числа, если в контексте явно не указано иного. Также очевидно, что термины "содержит" и/или "содержащий", используемые в этом описании, указывают на присутствие установленных блоков, систем, шагов, операций, элементов и/или компонентов, но не исключают присутствия или добавления одной или более других блоков, систем, шагов, операций, элементов, компонентов и/или их групп.
Хотя в настоящем документе показаны и описаны конкретные варианты осуществления, для специалистов в этой области очевидно, что любой объект предназначенный для достижения той же самой цели, может быть заменен представленными конкретными вариантами осуществления, и что варианты осуществления по настоящему документу в других условиях могут иметь другое применение. Эта заявка предназначена для покрытия любых модификаций или вариантов настоящего изобретения. Следующая формула изобретения никоим образом не ограничивает объем настоящего изобретения описанными в настоящем документе конкретными вариантами осуществления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УСТАНОВЛЕНИЯ ФАКТА ПОТЕРИ СОЗНАНИЯ ЛЕТЧИКОМ В РЕЗУЛЬТАТЕ ВОЗДЕЙСТВИЯ ПЕРЕГРУЗОК | 1992 |
|
RU2072948C1 |
| СИСТЕМА АВТОМАТИЗАЦИИ РАБОТЫ ЛЕТНОГО ЭКИПАЖА | 2017 |
|
RU2732646C2 |
| Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения | 2016 |
|
RU2640076C2 |
| СИСТЕМА С УСТРОЙСТВОМ АВИАЦИОННОЙ ЭЛЕКТРОНИКИ И НАЗЕМНОЙ СТАНЦИЕЙ ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, ОТКЛОНИВШИМСЯ ОТ МАРШРУТА, И ДЛЯ АВАРИЙНОЙ СВЯЗИ | 2003 |
|
RU2318243C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2339547C9 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ СОДЕЙСТВИЯ РЕКОНФИГУРАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА, ЛЕТАТЕЛЬНЫЙ АППАРАТ, ВКЛЮЧАЮЩИЙ В СЕБЯ ТАКОЕ УСТРОЙСТВО | 2014 |
|
RU2673321C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ В СИСТЕМАХ ВОЗДУШНОГО ДВИЖЕНИЯ | 2018 |
|
RU2762151C2 |
| АВТОМАТИЧЕСКАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА ПЕРЕДАЧИ МЕТЕОРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК АЭРОДРОМА И ВВОДА ИХ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2012 |
|
RU2519622C2 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2388663C1 |




Группа изобретений относится к способу и бортовой системе автоматического управления самолетом в случае недееспособности экипажа. Для автоматического управления самолетом в случае недееспособности экипажа определяют недееспособность экипажа путем передачи на индикатор кокпита сообщения, требующего подтверждения экипажем путем введения кода безопасности, подают команду для управления самолетом на автопилот при отсутствии подтверждения от экипажа, управляют самолетом с помощью автопилота к месту приземления, перед приземлением самолета подают другое сообщение, требующее подтверждения от экипажа путем введения кода безопасности, определяют безопасную зону для полета самолета до выработки топлива, производят полет в безопасной зоне до выработки топлива. Бортовая система автоматического управления самолетом содержит процессор, два модуля воздействия на процессор, два автопилота, дополнительный модуль определения безопасной зоны, индикатор кокпита, устройство для ввода подтверждения экипажа, датчик регистрации команд ручного управления, датчик регистрации потери давления в самолете, машиночитаемый носитель со встроенным машиночитаемым программным кодом. Обеспечивается автоматическое управление самолетом в случае недееспособности экипажа. 2 н. и 10 з.п. ф-лы, 5 ил.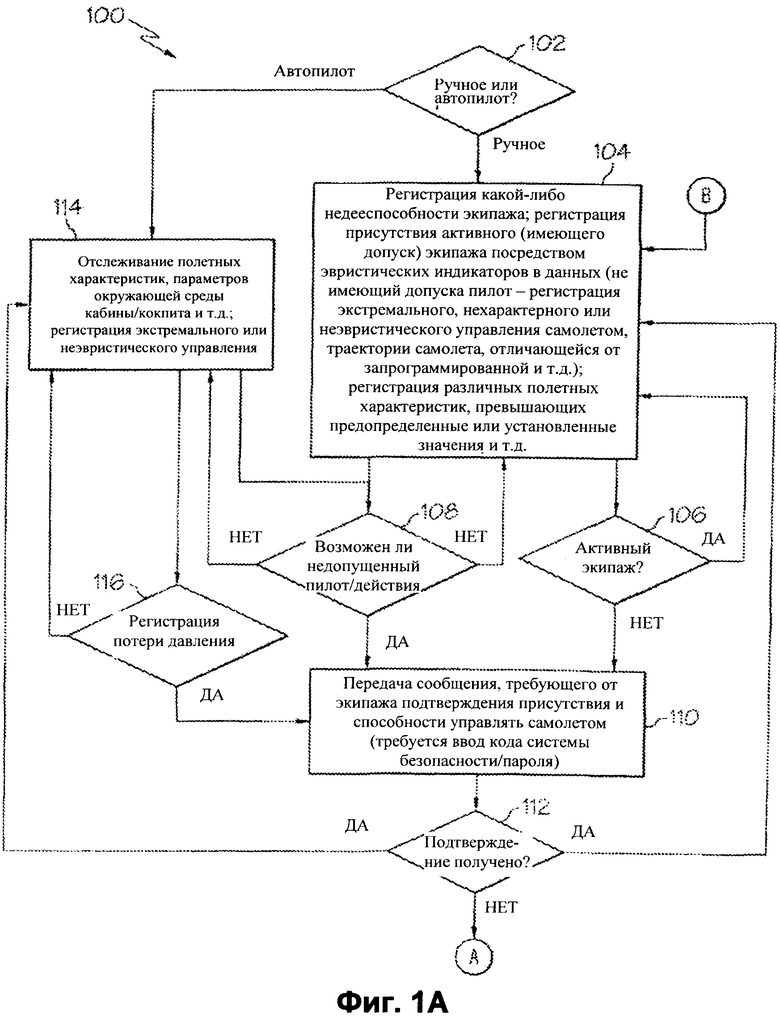
1. Способ автоматического управления самолетом в случае недееспособности экипажа, включающий:
определение недееспособности экипажа;
передачу на индикатор кокпита сообщения, требующего подтверждения от экипажа по факту определения недееспособности экипажа, при этом требование подтверждения от экипажа содержит получение кода системы безопасности, известного только имеющему доступ члену экипажа; и
подачу команды управления самолетом через автопилот по факту отсутствия подтверждения от экипажа;
управление самолетом к месту приземления посредством автопилота в ответ на подачу команды управления самолетом через автопилот;
обеспечение другого сообщения, требующего подтверждения от экипажа, когда самолет достиг места приземления, при этом требование подтверждения от экипажа содержит получение кода системы безопасности;
определение безопасной зоны во избежание повреждения при столкновении с землей и времени полета в безопасной зоне до полной выработки топлива по факту неполучения кода системы безопасности в ответ на другое сообщение; и
полет самолета в безопасной зоне до выработки топлива по факту неполучения кода системы безопасности в ответ на другое сообщение.
2. Способ по п. 1, в котором определение недееспособности экипажа включает определение присутствия активного экипажа посредством оценки эвристических индикаторов полетных данных, соответствующих самолету, управляемому человеком, когда управление самолетом осуществляется вручную.
3. Способ по п. 1, дополнительно включающий:
отслеживание параметров управления полетом для регистрации какого-либо неэвристического управления самолетом; и
отслеживание параметров среды в кокпите для обнаружения потери давления в самолете.
4. Способ по п. 1, в котором определение недееспособности экипажа включает по меньшей мере одну из следующих операций:
регистрацию крена и скорости крена самолета, превышающих предопределенные значения крена и скорости крена;
регистрацию тангажа и скорости тангажа самолета, превышающих предопределенные значения тангажа и скорости тангажа;
регистрацию рыскания и скорости рыскания самолета, превышающих предопределенные значения рыскания и скорости рыскания;
регистрацию высоты, отличной от допустимой или предустановленной высоты;
регистрацию направления, отличного от допустимого или запланированного направления;
регистрацию скорости, отличной от допустимой или предопределенной скорости;
регистрацию конфигурации самолета, отличной от ожидаемой конфигурации для конкретного этапа полета; и
регистрацию данных диапазонов, отличных от ожидаемых диапазонов для конкретного этапа полета.
5. Способ по п. 1, в котором передача сообщения, требующего подтверждения от экипажа, включает передачу сообщения по факту обнаружения потери давления самолета.
6. Способ по п. 1, в котором команда автопилоту на управление самолетом по факту отсутствия подтверждения от экипажа включает подачу команды автопилоту выполнить полет в заданном эшелоне и снизить высоту до предустановленной высоты.
7. Способ по п. 1, дополнительно включающий:
регистрацию управления самолетом не имеющим доступа пилотом;
требование ввода кода системы безопасности; и
команду на управление самолетом через автопилот по факту не принятого кода системы безопасности или принятого неправильного кода системы безопасности.
8. Способ по любому из пп. 1 или 7, дополнительно включающий передачу автоматического сообщения на наземную станцию по факту принятия автопилотом управления самолетом.
9. Бортовая система автоматического управления самолетом в случае недееспособности экипажа, содержащая:
процессор;
модуль воздействия на процессор для автоматического управления самолетом в случае недееспособности экипажа, причем модуль настроен на определение какой-либо недееспособности экипажа и передачу сообщения на индикатор кокпита, требующего подтверждения от экипажа по факту определения недееспособности экипажа, при этом подтверждение от экипажа содержит код системы безопасности, который известен только имеющему доступ члену экипажа;
автопилот для управления самолетом по факту отсутствия подтверждения от экипажа, при этом автопилот выполнен с возможностью управления самолетом к месту приземления по факту подачи команды управления самолетом через автопилот;
другой модуль воздействия на процессор, выполненный с возможностью подачи другого сообщения, требующего подтверждения от экипажа, когда самолет достиг места приземления, при этом требование подтверждения от экипажа содержит получение кода системы безопасности;
дополнительный модуль воздействия на процессор, выполненный с возможностью определения безопасной зоны во избежание повреждения при столкновении с землей и времени полета в безопасной зоне до полной выработки топлива по факту неполучения кода системы безопасности в ответ на другое сообщение; и
автопилот, выполненный с возможностью управления самолетом в безопасной зоне до полной выработки топлива по факту неполучения кода безопасности в ответ на другое сообщение.
10. Бортовая система по п. 9, дополнительно содержащая:
индикатор кокпита, выполненный с возможностью передачи сообщения, требующего подтверждения от экипажа; и
входное устройство для ввода подтверждения экипажем.
11. Бортовая система по п. 9, дополнительно содержащая:
датчик регистрации команд ручного управления, подаваемых экипажем, причем недееспособность экипажа определяется по отсутствию регистрации этим датчиком каких-либо команд ручного управления, подаваемых экипажем, когда самолет находится в режиме ручного управления, или регистрации этим датчиком нехарактерного управления самолетом; и
датчик регистрации потери давления в самолете.
12. Бортовая система по п. 9, дополнительно содержащая компьютерный программный продукт, включающий: машиночитаемый носитель со встроенным машиночитаемым программным кодом, при этом машиночитаемый программный код включает:
исполняемые команды по любому из пп. 1-8.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2370416C1 |
| СПОСОБ ЭЛЕКТРОХИМИЧЕСКОЙ ОБРАБОТКИ ЛОПАТОК МОНОКОЛЕСА | 2008 |
|
RU2381879C2 |
| СПОСОБ УСТРАНЕНИЯ НЕИСПРАВНОСТИ ВРАЩАЮЩЕГОСЯ ВЫПРЯМИТЕЛЯ БЕСЩЕТОЧНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 1992 |
|
RU2050671C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ПОДДЕРЖКИ ДЕЯТЕЛЬНОСТИ ЭКИПАЖА ПО ОБЕСПЕЧЕНИЮ БЕЗОПАСНОСТИ КОРАБЛЯ | 2002 |
|
RU2244343C2 |

