Изобретение относится к приводному устройству для линейного перемещения поршня расположенного на инфузионном насосе инфузионного шприца с основным приводным блоком, который включает в себя основное контактное устройство для создания опоры для поршня инфузионного шприца, фиксирующее устройство для фиксации поршня инфузионного шприца на основном контактном устройстве, а также средства для приведения в действие фиксирующего устройства, и с тяговым устройством для основного приводного блока, которое включает в себя приводимый в движение мотором тяговый шпиндель и составную гайку тягового шпинделя, которая имеет, по меньшей мере, одну подвижную в радиальном направлении створку гайки, причем основной приводной блок дополнительно включает в себя устройство обнаружения для обнаружения поршня инфузионного шприца перед основным контактным устройством.
Кроме того, изобретение относится к инфузионному насосу с основным приводным блоком для перемещения поршня расположенного на инфузионном насосе инфузионного шприца и с тяговым устройством для приведения в действие основного приводного блока.
Помимо этого, изобретение относится к способу для замены инфузионного шприца в инфузионном насосе с основным приводным блоком для линейного перемещения поршня инфузионного шприца, при котором (способе), по меньшей мере, одна подвижная в радиальном направлении створка гайки тягового шпинделя отцепляется в радиальном направлении от тягового шпинделя тягового устройства для приведения в движение основного приводного блока, так что основной приводной блок в осевом направлении может быстро вручную доставляться до пластины поршня инфузионного шприца, и при котором для предотвращения непреднамеренной выдачи разовой дозы пластина поршня обнаруживается при этом контактным элементом, который согласован с основным приводным блоком, до того, как пластина поршня вступает в контакт с основной контактной поверхностью основного контактного устройства основного приводного блока.
В частности соответствующие типу приводные устройства и соответствующие им шприцевые насосы хорошо известны из уровня техники и успешно используются на протяжении длительного времени в инфузионной терапии.
Например, из WO 2011/039250 A1 известен способ для предотвращения непреднамеренной выдачи разовой дозы по отношению к ручному движению доставки устройства перемещения для поршня инфузионного шприца, в частности после смены инфузионного шприца в инфузионном насосе, а также известен соответствующий инфузионный насос для этого. Наряду с устройством перемещения для перемещения поршня инфузионного шприца инфузионный насос имеет в частности приемный элемент инфузионного шприца для фиксации инфузионного шприца, привод, который включает в себя состоящую из двух частей гайку тягового шпинделя, для приведения в движение устройства перемещения, а также устройство для блокировки ручного движения доставки устройства перемещения. При этом привод отличается тяговым шпинделем и тягово-сцепным устройством для соединения устройства перемещения с тяговым шпинделем или для отсоединения устройства перемещения от него, вследствие чего в отсоединенном состоянии тягово-сцепного устройства устройство перемещения предпочтительным образом может быстро и вручную доставляться до поршня вновь вставленного инфузионного шприца. Эта быстрая доставка вручную наиболее предпочтительна в критических ситуациях, если есть необходимость в быстром подведении важной инфузии к пациенту. Однако при этом для возможности сокращения опасности небезопасной непреднамеренной выдачи разовой дозы пациенту инфузионный насос имеет в своем распоряжении устройство блокировки, при помощи которого ручное движение доставки может быстро прерываться, если устройство перемещения было вручную доставлено до поршня инфузионного шприца достаточно близко. В частности устройство блокировки отличается расположенным рядом с тяговым шпинделем контрольным резьбовым валом с неразъемно-сопряженной с ним гайкой резьбового вала и тормозным устройством для контрольного резьбового вала. Гайка резьбового вала прочно соединена с устройством перемещения, так что ручное движение доставки немедленно блокируется, как только тормозное устройство блокирует вращение контрольного резьбового вала. Устройство блокировки управляется согласованным с устройством перемещения сигнальным устройством, которое включает в себя, по меньшей мере, один датчик на устройстве перемещения, который может обнаруживать приближение устройства перемещения к поршню инфузионного шприца, причем тормозное устройство блокирует контрольный резьбовой вал, если достигнуто или превышено определенное приближение поршня инфузионного шприца к устройству перемещения. Вследствие этого в ходе быстрого ручного движения доставки может безопасно предотвращаться непреднамеренное или критическое столкновение с поршнем инфузионного шприца. Для блокировки контрольного резьбового вала устройство блокировки имеет электромагнитный тормоз, который электрически соединен с сигнальным устройством.
Задача данного изобретения сделать замену инфузионного шприца в инфузионном насосе более простой и, тем не менее, более безопасной, в частности с точки зрения опасности непреднамеренной выдачи разовой дозы пациенту.
С одной стороны задача изобретения решается с помощью приводного устройства для линейного перемещения поршня расположенного на инфузионном насосе инфузионного шприца с основным приводным блоком, который включает в себя основное контактное устройство для создания опоры для поршня инфузионного шприца, фиксирующее устройство для фиксации поршня инфузионного шприца на основном контактном устройстве, а также средства для приведения в действие фиксирующего устройства, и с тяговым устройством для основного приводного блока, которое включает в себя приводимый в движение мотором тяговый шпиндель и составную гайку тягового шпинделя, которая имеет, по меньшей мере, одну подвижную в радиальном направлении створку гайки, причем основной приводной блок дополнительно включает в себя устройство обнаружения для обнаружения поршня инфузионного шприца перед основным контактным устройством, причем приводное устройство отличается тем, что устройство обнаружения имеет многопороговый сенсорный блок с, по меньшей мере, двухступенчатым устройством регистрации передней зоны для регистрации различных положений поршня инфузионного шприца перед основным контактным устройством.
Согласно изобретению понятие «многопороговый сенсорный блок» описывает устройство для обнаружения различных положений расположенного перед основным приводным блоком поршня инфузионного шприца, в частности пластины поршня, до того, как поршень инфузионного шприца опирается при помощи пластины поршня на основном контактном устройстве основного приводного блока.
При этом многопороговый сенсорный блок может состоять из нескольких отдельных датчиков, которые расположены на или в основном приводном блоке, и которые там с точки зрения функциональности могут быть соединены друг с другом в сенсорный блок. Или сенсорный блок состоит из единственного конструктивного элемента, в корпусе которого, по меньшей мере, частично размещены, по меньшей мере, два датчика, в зависимости от того, какое конструктивное исполнение может более предпочтительно использоваться в конкретном осуществлении.
Предпочтительным образом благодаря многопороговому сенсорному блоку за счет введения, по меньшей мере, двухступенчатой структуры может автоматизироваться процесс надлежащего ввода в эксплуатацию инфузионного насоса, в частности после смены инфузионного шприца, до того, как основное контактное устройство может вступить в контакт с пластиной поршня инфузионного шприца, вследствие чего ввод в эксплуатацию инфузионного насоса может производиться существенно эффективнее и, кроме того, более безопасно.
С одной стороны это связано с тем, что блокировка ручной доставки основного приводного блока может приводиться в действие при помощи первой ступени устройства регистрации передней зоны, причем дальнейшая доставка затем может непосредственно продолжаться посредством осуществляемой мотором доставки, которая в идеале посредством второй ступени устройства регистрации передней зоны плавно переходит в заданный осуществляемый мотором возврат в исходное положение, при котором тяговый шпиндель осуществляет всего лишь определенное количество оборотов. Вследствие этого основной приводной блок может с одной стороны чрезвычайно быстро, а с другой стороны исключительно точно подводиться к пластине поршня и размещаться на ней в состоянии готовом к использованию.
В этом отношении с другой стороны задача изобретения также решается с помощью способа для замены инфузионного шприца в инфузионном насосе с основным приводным блоком для линейного перемещения поршня инфузионного шприца, при котором (способе), по меньшей мере, одна подвижная в радиальном направлении створка гайки тягового шпинделя отцепляется в радиальном направлении от тягового шпинделя тягового устройства для приведения в движение основного приводного блока, так что основной приводной блок в осевом направлении может быстро вручную доставляться до пластины поршня инфузионного шприца, и при котором для предотвращения непреднамеренной выдачи разовой дозы пластина поршня может при этом обнаруживаться контактным элементом, который согласован с основным приводным блоком, до того, как пластина поршня вступает в контакт с основной контактной поверхностью основного контактного устройства основного приводного блока, причем:
- на первом шаге обнаружения контактный элемент приводит в действие первый сенсорный элемент, вследствие чего доставка вручную основного приводного блока блокируется при помощи гайки тягового шпинделя и самого тягового шпинделя, благодаря тому, что, по меньшей мере, одна подвижная в радиальном направлении створка гайки сцепляется в радиальном направлении с тяговым шпинделем, причем затем при помощи тягового устройства основной приводной блок, будучи приведен в действие мотором, доставляется далее до пластины поршня,
- на втором шаге обнаружения контактный элемент приводит в действие второй сенсорный элемент, вследствие чего инициируется осуществляемый мотором возврат в исходное положение основного приводного блока вплоть до основной контактной поверхности основного контактного устройства, и
- на третьем шаге обнаружения в ходе контакта пластины поршня с основной контактной поверхностью осуществляемый мотором возврат в исходное положение останавливается, и стопорные скобы фиксирующего устройства для пластины поршня закрываются, вследствие чего пластина поршня фиксируется на основном контактном устройстве.
Благодаря этому многократному обнаружению эксплуатационная надежность в инфузионном насосе может повышаться далее, без того чтобы дошло при этом до задержки при замене инфузионного шприца.
Предпочтительным образом доставка вручную основного приводного блока блокируется до того, как контактный элемент приводит в действие второй сенсорный элемент. Вследствие этого может в частности обеспечиваться то, что гайка тягового шпинделя правильно вошла в зацепление с тяговым шпинделем до того, как начинается возврат в исходное положение при помощи второго датчика многопорогового сенсорного блока, как только этот второй датчик соответственно приводится в действие при помощи контактного элемента. Таким образом, может постоянно обеспечиваться точное положение основного приводного блока относительно пластины поршня до того, как начинается возврат в исходное положение.
Предпочтительный вариант способа предусматривает, что осуществляемый мотором возврат в исходное положение выполняется при помощи определенного количества моторных шагов. Благодаря определенному количеству моторных шагов может реализовываться точно предопределенное количество оборотов тягового шпинделя, а с ним также определенный путь доставки для основного приводного блока, в частности на последних миллиметрах, так что основной приводной блок может в любое время особо точно размещаться перед пластиной поршня.
Кроме того, наиболее предпочтительно с точки зрения конструкции, если многопороговый сенсорный блок имеет, по меньше мере, два датчика, которые могут приводиться в действие при помощи единственного сенсорного элемента, причем сенсорный элемент включает в себя контактный элемент, который выступает за основное контактное устройство.
Так как установочные пространства на основном приводном блоке, в частности на основном контактном устройстве для пластины поршня инфузионного шприца, чаще всего рассчитаны очень ограниченными, наиболее предпочтительно, если, по меньше мере, два датчика многопорогового сенсорного блока могут приводиться в действие только единственным сенсорным элементом.
Предпочтительным образом контактный элемент выполнен сразу в виде сенсорного элемента, так что основной приводной блок может создаваться еще более компактным.
Подразумевается, что упомянутые выше, приводимые в действие датчики могут быть выполнены в виде самых разнообразных сенсорных устройств. Например, могут использоваться звуковые датчики.
Наиболее предпочтительный с точки зрения конструкции вариант осуществления предусматривает, что устройство обнаружения предпочтительно включает в себя, по меньше мере, два световых затвора, которые расположены аксиально друг за другом внутри основного приводного блока. В частности оба расположенных таким образом друг за другом световых затвора с точки зрения конструкции могут приводиться в действие наиболее просто при помощи единственного сенсорного элемента.
При этом «в осевом направлении» или «аксиально» по существу означает на одной прямой с движением доставки основного приводного блока, так что ось приведения в действие сенсорного элемента предпочтительно совпадает с осью перемещения поршня инфузионного шприца или расположена параллельно относительно нее. В этом отношении предпочтительным образом сенсорный элемент может быть без проблем выполнен в виде одного конструктивного элемента с контактном элементом.
Дальнейшее конструктивное упрощение в основном приводном блоке может достигаться, если, по меньшей мере, один из обоих световых затворов выполнен в виде вилочного светового затвора.
Сверх этого предпочтительно, если основное контактное устройство имеет мембранную тарелку, которая включает в себя имеющий контактный элемент сенсорный элемент для включения датчиков многопорогового сенсорного блока.
Например, подпружиненная мембранная тарелка является, по меньшей мере, одним конструктивным элементом или группой конструктивных элементов средств для приведения в действие фиксирующего устройства для пластины поршня. В таком случае если в этой подпружиненной мембранной тарелке сразу расположен сенсорный элемент многопорогового сенсорного блока, то устройство обнаружения может далее упрощаться с точки зрения конструкции.
Предпочтительно, если единственный сенсорный элемент многопорогового сенсорного блока расположен внутри средств для приведения в действие фиксирующего устройства, так что в частности основное контактное устройство может создаваться еще более компактным.
Дальнейший наиболее предпочтительный вариант осуществления предусматривает, что единственный сенсорный элемент многопорогового сенсорного блока имеет ход вперед со значением между 2 мм и 10 мм, предпочтительно со значением в 4 мм, до того, как первая ступень двухступенчатого устройства регистрации передней зоны может приводиться в действие единственным сенсорным элементом. Благодаря выбранному таким образом короткому ходу вперед уменьшена опасность того, что при слишком резком ручном движении доставки устройство блокировки не может реагировать достаточно быстро, и пластина поршня опасно ударятся об основное контактное устройство.
Если приводное устройство имеет, по меньшей мере, одно действующее в зависимости от устройства обнаружения общее устройство управления и/или регулировки для автоматического радиального сцепления, по меньшей мере, одной подвижной в радиальном направлении створки гайки с тяговым шпинделем и для инициации возврата в исходное положение основного контактного устройства вплоть до инфузионного поршня, причем возврат в исходное положение может осуществляться при помощи сцепленной в радиальном направлении гайки тягового шпинделя, то совместные действия этих задач (по сцеплению и инициации возврата) могут наиболее предпочтительно объединяться друг с другом.
Чтобы могло наиболее быстро достигаться уменьшение запаса энергии и вместе с ним также уменьшение магнитных полей на обоих удерживающих электромагнитах, предпочтительно, если устройство управления и/или регулировки включает в себя схемный блок сравнения для включения удерживающих электромагнитов.
В этом отношении предпочтительно, если тяговое устройство включает в себя управляемые при помощи устройства обнаружения удерживающие электромагниты для приведения в действие перемещаемых в осевом направлении подвижных втулок для радиального сцепления гайки тягового шпинделя с тяговым шпинделем.
Несмотря на более быструю возможность замены инфузионного шприца в инфузионном насосе, при помощи данного изобретения опасность неконтролируемой инфузии предпочтительным образом может уменьшаться еще значительнее.
Говоря о данном инфузионном насосе, речь в частности идет о шприцевом насосе, в котором может помещаться, по меньшей мере, один инфузионный шприц. Данный инфузионный насос может эксплуатироваться как отдельный насос, так и, будучи объединен в упорядоченной системе или установочной станции (док-станции).
Дальнейшие преимущества, цели и свойства данного изобретения разъясняются посредством приложенного чертежа и последующего описания, на которых в качестве примера изображено и описано приводное устройство с включающим в себя двухпороговый сенсорный блок основным приводным блоком инфузионного насоса. На чертеже:
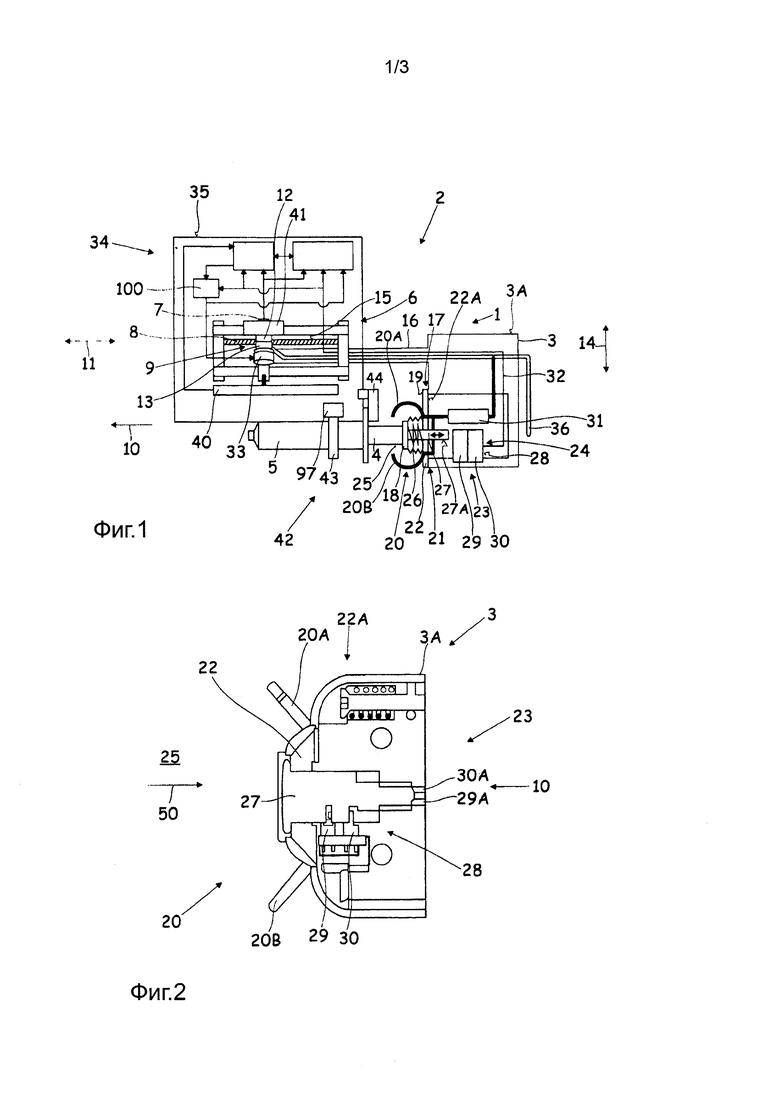
фиг. 1 схематично показывает вид инфузионного насоса, который включает в себя приводное устройство, имеющее основной приводной блок с устройством обнаружения, которое включает в себя двухпороговый сенсорный блок;
фиг. 2 схематично показывает вид в продольном разрезе передней области основного приводного блока;
фиг. 3 схематично показывает вид в перспективе частичного разреза приводного устройства инфузионного насоса из фиг. 1 и 2 с основным приводным блоком и с тяговым устройством для него;
фиг. 4А схематично показывает вид первого рабочего положения приводного устройства из фиг. 1 и 2, при котором (положении) основной приводной блок может вручную доставляться до пластины поршня;
фиг. 4В схематично показывает вид второго рабочего положения, которое продвинуто вперед по отношению к первому рабочему положению из фиг. 4А, и при котором контактный элемент устройства обнаружения в основном приводном блоке привел в действие первое пороговое значение двухпорогового сенсорного блока;
фиг. 4С схематично показывает вид третьего рабочего положения, которое продвинуто вперед по отношению ко второму рабочему положению из фиг. 4В, и при котором контактный элемент привел в действие второе пороговое значение двухпорогового сенсорного блока, и сверх этого приведен в действие датчик давления;
фиг. 5А схематично показывает подробный вид тягового устройства в первом рабочем положении с точки зрения фиг. 4А;
фиг. 5В схематично показывает вид продольного разреза подробного вида из фиг. 5А;
фиг. 6А схематично показывает подробный вид тягового устройства во втором рабочем положении с точки зрения фиг. 4В;
фиг. 6В схематично показывает вид продольного разреза подробного вида из фиг. 6А;
фиг. 7А схематично показывает подробный вид тягового устройства в третьем рабочем положении с точки зрения фиг. 4С;
фиг. 7В схематично показывает вид продольного разреза подробного вида из фиг. 7А.
Показанное на фиг. с 1 по 7 приводное устройство 1 инфузионного насоса 2 по существу включает в себя основной приводной блок 3 для перемещения поршня 4 закрепленного на инфузионном насосе 2 инфузионного шприца 5 и тяговое устройство 6 для основного приводного блока 3.
Тяговое устройство 6 по существу включает в себя тяговый ползун 7, тяговый шпиндель 8, а также составную гайку 9 тягового шпинделя. Сверх этого тяговое устройство 6 включает еще в себя тяговый мотор и соответствующий передаточный механизм, которые, однако, в данном случае не изображены. При помощи тягового устройства 6 осуществляется линейное движение доставки основного приводного блока 3. При помощи тягового ползуна 7 обеспечено линейное перемещение и защита от прокручивания основного приводного блока 3.
При выбранном соответствующим образом направлении вращения тягового шпинделя 8 составная гайка 9 тягового шпинделя или тяговый ползун 7 могут перемещаться вперед в направлении 10 приведения в движение поршня, причем в частности составная гайка 9 тягового шпинделя перемещается аксиально вдоль продольной протяженности 11 тягового шпинделя 8.
При этом составная гайка 9 тягового шпинделя включает в себя первую подвижную в радиальном направлении створку 12 гайки и вторую подвижную в радиальном направлении створку 13 гайки, как будет описано еще более подробно ниже. Так или иначе, подвижные в радиальном направлении створки 12 и 13 гайки могут обеспечивать осевое геометрическое замыкание с тяговым шпинделем 8, а также, однако, отходить от него. Для этого обе подвижные в радиальном направлении створки 12 и 13 гайки расположены в тяговом ползуне 7, будучи установлены с возможностью сцепления и расцепления по отношению к тяговому шпинделю 8.
Понятие «в радиальном направлении» обозначает радиальное направление 14 перемещения по существу поперек продольной протяженности 11 тягового шпинделя 8.
Далее тяговый шпиндель 8 имеет наружную резьбу 15, при помощи которой составная гайка 9 тягового шпинделя может соединяться с геометрическим замыканием.
Основной приводной блок 3 закреплен на тяговом ползуне 7 при помощи опорного кронштейна 16, так что основной приводной блок 3 может перемещаться соответственно в осевом направлении вместе с тяговым ползуном 7.
Кроме того, основной приводной блок 3 имеет основное контактное устройство 17 для создания опоры для пластины 18 поршня 4 инфузионного шприца. Пластина 18 поршня опирается на основное контактное устройство 17, когда поршень 4 инфузионного шприца перемещается от основного приводного блока 3 в направлении 10 приведения в движение поршня. Для этого основное контактное устройство 17 образует основную контактную поверхность 19, на которую опирается пластина 18 поршня.
При этом пластина 18 поршня фиксируется на основном приводном блоке 3 при помощи фиксирующего устройства 20, так что обеспечено соединение с геометрическим замыканием между пластиной 18 поршня 4 инфузионного шприца и основным приводным блоком 3.
При этом фиксирующее устройство 20 оснащено средствами 21 для приведения в действие фиксирующего устройства 20, которые включают в себя мембранную тарелку 22, которая в свою очередь создает датчик 22А давления, при помощи которого может обнаруживаться нажимное или контактное давление относительно пластины 18 поршня перед основным контактным устройством 17. Если регистрируется соответствующее давление, то вызывается движение стопорных скоб 20A и 20В фиксирующего устройства 20, которые (скобы) затем защелкиваются вовнутрь и фиксируют пластину 18 поршня на основной контактной поверхности 19 с геометрическим и силовым замыканием (см. также фиг. 2 и 4).
В то время как средства 21 для приведения в действие фиксирующего устройства 20 в частности посредством своей мембранной тарелки 22 и своего датчика 22А давления могут в целом согласовываться с устройством 23 обнаружения основного приводного блока 3, устройство 23 обнаружения в особенности отличается многопороговым сенсорным блоком 24 для обнаружения поршня 4 инфузионного шприца в передней зоне 25 перед основным контактным устройством 17.
Сверх этого устройство 23 обнаружения имеет сенсорный элемент 27, который подпружинен пружиной 26 и может перемещаться в осевом направлении, для воздействия на многопороговый сенсорный блок 24. При этом сенсорный элемент 27 выполнен конструктивно просто непосредственно за счет контактного элемента 27А основного приводного блока 3, который (контактный элемент) выступает за основное контактное устройство 17 вглубь передней зоны 25.
При этом многопороговый сенсорный блок 2 4 отличается, по меньшей мере, двухступенчатым устройством 28 регистрации передней зоны, которое оснащено первым световым затвором 29 и вторым световым затвором 30, которые расположены в осевом направлении друг за другом, вследствие чего на них обоих конструктивно особенно просто может воздействовать единственный сенсорный элемент 27.
В то время как с одной стороны при помощи датчика 22А давления мембранной тарелки 22 может управляться функция приводного механизма 31 фиксирующего устройства 20, с другой стороны при помощи многопорогового сенсорного блока 24 может оказываться воздействие на функцию тягового устройства 6, как будет описано еще более подробно ниже. Для этого многопороговый сенсорный блок 24 соединен с блоком 33 управления тягового устройства 6 при помощи соответствующего сигнального провода 32.
Предпочтительным образом приводное устройство 1 включает еще в себя вышестоящее (т.е. более высокого уровня), действующее в зависимости от устройства 23 обнаружения, общее устройство 34 управления и регулировки для автоматического радиального сцепления обеих подвижных в радиальном направлении створок 12 и 13 гайки с тяговым шпинделем 8 и для инициации возврата в исходное положение основного контактного устройства 17 вплоть до поршня 4 инфузионного шприца, причем возврат в исходное положение может осуществляться при помощи сцепленной в радиальном направлении гайки 9 тягового шпинделя. Согласно изображению фиг.1 общее устройство 34 управления и регулировки расположено в верхней части корпуса 35 инфузионного насоса 2.
Дополнительно общее устройство 34 управления и регулировки отличается схемным блоком 100 сравнения для включения удерживающих электромагнитов 80 или 81 (см. фиг. 4, 5А и 5В), как это будет описано еще более подробно ниже.
Кроме того, на основном приводном блоке 3 предусмотрен управляемый вручную рычаг 36 управления, при помощи которого вручную могут дополнительно приводиться в действие функции стопорных скоб 20А и 20В, а также тягового устройства 6. Для механического приведения в действие тягового устройства 6 при помощи рычага 36 управления последний направляется от основного приводного блока 3 сквозь опорный кронштейн 16 до тягового устройства 6.
Однако, на устройстве 34 управления и/или регулировки, которое специально представлено на фиг. 1 в схематичном виде, здесь останавливаются подробно только в том случае, если его функции существенны для данного изобретения. Так устройство 34 управления и/или регулировки включает еще в себя, например датчик 40 для установки правильного монтажного положения инфузионного шприца 5 и, например датчик 41 геометрического замыкания для контроля состояния геометрического замыкания между составной гайкой 9 тягового шпинделя и самим тяговым шпинделем 8.
С возможностью доступа снаружи на корпусе 35 инфузионного насоса еще предусмотрен приемный элемент 42 для инфузионного шприца 5, который (элемент) включает в себя зажимную скобу 43 для радиальной фиксации инфузионного шприца 5 и зажимную накладку 44 для осевой фиксации инфузионного шприца 5 на приемном элементе 42 инфузионного насоса 2.
В показанном на фиг. 2 виде основной приводной блок 3 изображен более детально. Можно отчетливо увидеть устройство 23 обнаружения с его многопороговым сенсорным блоком 24 и двухступенчатым устройством 28 регистрации передней зоны, которое, в частности, имеет два расположенных в осевом направлении друг за другом световых затвора 29 и 30 и необходимый для этого, единственный сенсорный элемент 27 для срабатывания обоих световых затворов 29 или 30.
Первый световой затвор 29 электрически соединен с устройством 34 управления и/или регулировки при помощи первого электрического кабельного соединения 29А сигнального провода 32 (см. фиг. 1), а второй световой затвор 30 соответственно при помощи второго электрического кабельного соединения 30А сигнального провода 32.
На этом изображении за счет контакта с не изображенной здесь пластиной 18 поршня сенсорный элемент 27 согласно направлению 50 стрелки настолько далеко смещен вглубь основного приводного блока 3, что он разомкнул уже второй световой затвор 30. В этом отношении приводное устройство 1 находится во втором рабочем положении 61, которое позднее разъяснено еще более подробно.
Можно отчетливо увидеть встроенный в мембранной тарелке 22 с возможностью перемещения сенсорный элемент 27 двухступенчатого устройства 28 регистрации передней зоны, который (элемент) установлен подвижно по отношению к мембранной тарелке 22.
Так как расположенный за мембранной тарелкой 22 датчик 22А давления прижат пластиной 18 поршня еще не достаточно сильно, обе стопорные скобы 20А и 20В фиксирующего устройства 20 находятся еще в открытом положении (см. также фиг. 4В).
В дальнейшем функциональные взаимосвязи данного приводного устройства 1 разъясняются более подробно в частности с точки зрения фиг. 4, 5, 6 и 7. Приводное устройство 1 включает в себя приводимое автоматически в действие при помощи многопорогового сенсорного блока 24 устройство 51 блокировки для блокировки ручного движения доставки основного приводного блока 3 в направлении 10 приведения в движение поршня, причем предпочтительным образом устройство 51 блокировки включает в себя непосредственно составную гайку 9 тягового шпинделя.
Устройство 51 блокировки имеет подвижный в осевом направлении приводной элемент 52, который здесь в качестве примера включает в себя, по меньшей мере, одну подвижную в осевом направлении приводную втулку 53, которая расположена концентрически вокруг обеих створок 12 и 13 гайки 9 тягового шпинделя. При этом приводная втулка 53 установлена радиально снаружи на гайке 9 тягового шпинделя с возможностью перемещения в продольной протяженности 11 тягового шпинделя 8.
Чтобы устройство 51 блокировки могло активироваться предельно быстро, оно располагает средствами 54 для ускорения приводной втулки 53, причем средства 54 ускорения выполнены конструктивно просто в виде спиральной пружины 55, которая в свою очередь установлена радиально снаружи на приводной втулке 53.
Сверх этого приводной элемент 52 располагает еще деблокирующей втулкой 56, которая также может быть расположена с возможностью перемещения в осевом направлении и концентрически вокруг обеих створок 12 и 13 гайки 9 тягового шпинделя.
В этом отношении обе подвижные втулки 53 и 56 установлены также с возможностью осевого перемещения по отношению к продольной протяженности 57 обеих подвижных в радиальном направлении створок 12 и 13 гайки.
Для лучшего понимания принципа действия данного приводного элемента 52 гайки 9 тягового шпинделя, учитывая функцию многопорогового сенсорного блока 24, на фиг. 4А, 5А и 5В в качестве примера показано первое рабочее положение 60 приводного устройства 1, в котором (положении) обе створки 12 и 13 гайки не находятся в зацеплении с геометрическим замыканием с наружной резьбой 15 тягового шпинделя 8. В этом первом рабочем положении 60 основной приводной блок 3 может более быстро вручную перемещаться к пластине 18 поршня при помощи ручного движения доставки в направлении 10 приведения в движение поршня (см. также фиг. 4А). При этом сенсорный элемент 27 находится еще перед обоими световыми затворами 29 и 30. В этом отношении гайка 9 тягового шпинделя еще открыта, как это также схематично представлено справа за пределами изображения согласно фиг. 4А. В частности это рабочее положение 60 может выбираться в том случае, если в инфузионном насосе 2 производится замена инфузионного шприца.
Во втором рабочем положении 61, показанном на фиг. 4В, 6А и 6В в качестве примера, сенсорный элемент 27 смещен уже внутрь первого светового затвора 29, вследствие чего приведено в действие устройство 51 блокировки. Теперь благодаря сцепленной в радиальном направлении гайке 9 тягового шпинделя тяговое устройство 6 само по себе заблокировано, так что ручное движение доставки основного приводного блока 3 в направлении 10 приведения в движение поршня далее не возможно. Вследствие этого в этом отношении исключается опасность того, что мембранная тарелка 22 критично ударится о пластину 18 поршня, и вследствие этого ошибочно произойдет выдача разовой дозы, которая может быть опасной для пациента. Пластина 18 поршня еще не нажимает на датчик 22А давления позади мембранной тарелки 22, так что стопорные скобы 20A и 20В еще открыты.
В конечном счете, в дальнейшем третьем рабочем положении 62, выбранном с точки зрения фиг. 4С, 7А и 7В в качестве примера, приводное устройство 1 находится в основном режиме работы, при котором датчик 22А давления прижат пластиной 18 поршня достаточно сильно, вследствие чего стопорные скобы 20А и 20В закрыты. Теперь основной приводной блок 3 приводится в движение посредством тягового устройства 6 постепенно в направлении 10 приведения в движение поршня. В этом отношении желаемая инфузионная терапия может осуществляться известным самим по себе способом при помощи инфузионного насоса 2.
Если рассматривать теперь изображения всех фиг. 5, 6 и 7, то можно хорошо увидеть, что обе подвижные в радиальном направлении створки 12 и 13 гайки в каждом случае имеют область 64 сцепления для сцепления с наружной резьбой 15 тягового шпинделя 8. В этом отношении может устанавливаться соединение с геометрическим замыканием между створками 12 и 13 гайки 9 тягового шпинделя и наружной резьбой 15 тягового шпинделя 8 при помощи соответствующей области 64 сцепления створок 12 или 13 гайки, когда эта область 64 сцепления надлежащим образом перемещается соответственно удерживается в радиальном направлении тягового шпинделя 8. В таком случае обе створки 12, 13 гайки сцеплены по отношению к тяговому шпинделю 8. Это случается, например, в обоих рабочих положениях 61 и 62. Сверх этого обе подвижные в радиальном направлении створки 12 и 13 гайки имеют еще опорную область 65, при помощи которой створки 12 и 13 гайки могут опираться самое большее радиально на наружную резьбу 15, но не могут достигать зацепления с ней. Область 64 сцепления и опорная область 65 расположены в осевом направлении друг за другом.
Для возможности устанавливать обе подвижные в радиальном направлении створки 12, 13 гайки в каждом случае с обеими подвижными втулками 53, 56 относительно тягового шпинделя 8 в радиальном направлении приблизительно по оси 66 откидывания, которая проходит по существу поперек продольной протяженности 57 соответствующей створки 12 или 13 гайки, обе створки 12 и 13 гайки с конечной стороны 67 установлены в каждом случае на опоре тягового ползуна. Согласно изображению фиг. 5В, 6В и 7В ось 66 откидывания проходит перпендикулярно к плоскости чертежа.
Сверх этого гайка 9 тягового шпинделя имеет головную область и подножную область 70, соответствующие наружные диаметры которых больше, чем расположенная между ними область 71 гайки тягового шпинделя, причем головная область 69 образует рампу 72 для надвигания обеих перемещаемых в осевом направлении подвижных втулок 53 и 56, а подножная область 70 образует контропору 73 для обеих перемещаемых в осевом направлении подвижных втулок 53 и 56.
На противоположном опоре 68 тягового ползуна конце 7 4 гайки тягового шпинделя находится установленное в тяговом ползуне 7 остановочное устройство 75 для деблокирующей втулки 56, причем остановочное устройство 75 размещено в осевом направлении около гайки 9 тягового шпинделя. Если деблокирующая втулка 56 надета на место остановочного устройства 75 и при этом расположена около гайки 9 тягового шпинделя, то деблокирующая втулка 56 находится в открытом положении 76. Это случается в обоих рабочих положениях 60 и 61. В третьем рабочем положении 62 деблокирующая втулка 56 сдвинута на рампу 72, ив соответствии с этим она находится в закрытом положении 77.
В обоих рабочих положениях 60 и 62 в каждом случае приводная втулка 53 находится в своем собственном открытом положении 78, в котором приводная втулка 53 расположена ближе к контропоре 73, чем к рампе 72. Лишь в рабочем положении 61 приводная втулка 53 находится в своем отделенном закрытом положении 79.
Кроме того, тяговое устройство 6 включает в себя первый удерживающий электромагнит 80 и второй удерживающий электромагнит 81, которые в этом примере осуществления расположены над тяговым ползуном 7.
При этом первый удерживающий электромагнит 80 согласован с приводной втулкой 53, и в соответствии с этим он может соответствовать магнитной тарелке 82 приводной втулки 53. Для этого магнитная тарелка 82 размещена перед первым удерживающим электромагнитом 80 и, будучи соединена с приводной втулкой 53, установлена с возможностью перемещения в осевом направлении. В обоих рабочих положениях 60 и 62 первый удерживающий электромагнит 80 находится под напряжением, так что он может удерживать контакт с магнитной тарелкой 82 и тем самым может также удерживать приводную втулку 53 в ее открытом положении 78. Во втором рабочем положении 61 магнитная тарелка 82 расположена на расстоянии от первого удерживающего электромагнита 80, находящегося не под напряжением.
В соответствии с этим второй удерживающий электромагнит 81 согласован с деблокирующей втулкой 56, и он может соответствовать магнитной тарелке 83 деблокирующей втулки 56, причем эта магнитная тарелка 83 размещена для этого перед вторым удерживающим электромагнитом 81. Магнитная тарелка 83 перемещается в осевом направлении совместно с деблокирующей втулкой 56, так как магнитная тарелка 83 соединена с деблокирующей втулкой 56. В этом отношении в рабочих положениях 60 и 61 магнитная тарелка 83 находится в контакте со вторым удерживающим электромагнитом 81, находящимся под напряжением, в то время как в третьем рабочем положении 62 она расположена на расстоянии от второго удерживающего электромагнита 81, находящегося не под напряжением.
Если же теперь есть желание или необходимость замены инфузионного шприца, то инфузия останавливается. Затем на основном приводном блоке 3 приводится в действие рычаг 36 управления. С приведением в действие рычага 36 управления при помощи опорного кронштейна 16, который выполнен в виде трубы 90 (см. фиг. 3), через внутренний фиксирующий вал 91 нагруженная пружиной 92 деблокирующая втулка 56 перемещается в направлении второго удерживающего электромагнита 81. Это приведение в действие дополнительно выявляется микропереключателем, который включает в себя непоказанный здесь датчик, вследствие чего оба удерживающих электромагнита 80 и 81 через соответствующие электрические кабели 93 или 94 нагружаются напряжением, и вследствие этого обе подвижные втулки 53 и 56 отделяются друг от друга. При этом открываются обе створки 12 и 13 гайки. Также открываются стопорные скобы 20A или 20В фиксирующего устройства 20 за счет приведения в действие рычага 36 управления. Геометрическое замыкание между тяговым шпинделем 8 и гайкой 9 тягового шпинделя согласно первому рабочему положению 60 разъединено, и основной приводной блок 3 может доставляться в выдвинутое положение (см. фиг. 4А) против направления 10 приведения в движение поршня.
Затем зажимная скоба 43 открывается и соответствующим образом поворачивается, так что приемный элемент 42 является легко доступным. Смонтированный внутри корпуса 35 инфузионного насоса потенциометр 97 распознает состояние зажимной скобы 43 (см. фиг. 1). Теперь заменяемый инфузионный шприц может извлекаться, а новый инфузионный шприц 5 может вставляться в приемный элемент 42. При этом лопасти вставляемого инфузионного шприца 5 фиксируются в зажимной накладке 44, так что новый инфузионный шприц 5 зафиксирован в осевом направлении на насосе 2 инфузионного шприца. В связи с этим зажимная скоба 43 также снова закрывается, так что инфузионный шприц 5 также зафиксирован в радиальном направлении. При помощи потенциометра 97 на зажимной скобе 43 немедленно измеряется диаметр инфузионного шприца.
Теперь в соответствии с уровнем наполнения инфузионного шприца 5 и тем самым также в соответствии с положением поршня 4 инфузионного шприца основной приводной блок 3 может подводиться к пластине 18 поршня. Чтобы при этом могли более быстро преодолеваться большие расстояния между основным приводным блоком 3 и пластиной 18 поршня, это может совершаться посредством ручного движения доставки в направлении 10 приведения в движение поршня, так как обе подвижные в радиальном направлении створки 12 и 13 гайки не находятся в зацеплении с наружной резьбой 15 тягового шпинделя 8, как это изображено в первом рабочем положении 60 согласно фиг.4А, 5А и 5В. В первом рабочем положении 60 оба удерживающих электромагнита 80 и 81 находятся под напряжением, подвижные втулки 53 и 56 расположены отдельно друг от друга, а обе створки 12 и 13 гайки открыты в радиальном направлении. Кроме того, при этом открыто фиксирующее устройство 20 в основном приводном блоке 3.
Однако, как только контактный элемент 27А вступит в контакт с пластиной 18 поршня (см. фиг. 4В), в частности сенсорный элемент 27 перемещается вовнутрь в основной приводной блок 3. Внутри корпуса 3А основного приводного блока сенсорный элемент 27 последовательно проходит через два световых затвора 29 и 30 многопорогового сенсорного блока 24.
При проходе через первый световой затвор 29 (см. далее фиг.4В) прерывается подача напряжения первому удерживающему электромагниту 80, и приводная втулка 53 пружинит при помощи дальнейшей пружины 92 по рампе 72 обеих подвижных в радиальном направлении створок 12 и 13 гайки, вследствие чего при помощи области 64 сцепления гайка 9 тягового шпинделя мгновенно входит в зацепление с геометрическим замыканием с наружной резьбой 15 тягового шпинделя 8. При этом блокируется тяговое устройство 6, как это изображено во втором рабочем положении 61 согласно фиг. 4В, 6А и 6В. Вследствие этого ручное движение доставки в направлении 10 приведения в движение поршня мгновенно прерывается.
Однако теперь тяговое устройство 6 перемещается далее автоматически, до тех пор, пока сенсорный элемент 27 не пройдет через второй световой затвор 30 (см. в частности фиг. 4С). При этом второй световой затвор 30 необходим, так как изменение положения закрытых в радиальном направлении и таким образом сцепленных в радиальном направлении створок 12 и 13 гайки при помощи их областей 64 сцепления по отношению к тяговому шпинделю 8 зависит от скорости реакции первого удерживающего электромагнита 80 и скорости перемещения основного приводного блока 3 до пластины 18 поршня. Кроме того, существует возможность того, что при закрытии гайки 9 тягового шпинделя обе подвижные в радиальном направлении створки 12 и 13 гайки лежат лишь на боковых поверхностях наружной резьбы 15, и таким образом область 64 сцепления гайки 9 тягового шпинделя сцеплена не эффективно с наружной резьбой 15. Тем не менее, посредством короткой операции гайка 9 тягового шпинделя может надлежащим образом входить в зацепление с тяговым шпинделем 8 до второго светового затвора 30. В этом случае при достижении второго светового затвора 30 линейное положение приводного устройства 1 определено.
Согласно изобретению при этом возврате в исходное положение тяговое устройство 6 находится во втором рабочем положении 61, в котором первый удерживающий электромагнит 80 обесточен, а второй удерживающий электромагнит 81, тем не менее, находится под напряжением. Обе подвижные втулки 53 и 56 сдвинуты влево в тяговом ползуне 7, а обе створки 12 и 13 гайки закрыты в радиальном направлении. Фиксирующее устройство 20 на основном приводном блоке 3 еще открыто (см. фиг. 4В).
Основной приводной блок 3 проходит спланированный путь от второго светового затвора 30 до мембранной тарелки 22 и расположенного за ней датчика 22А давления, при помощи которого обнаруживается и сигнализируется правильное прилегание пластины 18 поршня к основной контактной поверхности 19 на основном приводном блоке 3 (см. фиг. 4С).
Второй удерживающий электромагнит 81 обесточивается, деблокирующая втулка 56 перемещается в свое закрытое положение 77 (см. в частности фиг. 7А и 7В), фиксирующее устройство 20 закрывается и стопорные скобы 20A или 20В прикладываются к пластине 18 поршня инфузионного шприца 5 с геометрическим и силовым замыканием. Теперь инфузионный шприц 5 зафиксирован надежно и без зазора (см. фиг. 4С).
При помощи зажимной скобы 43 и потенциометра 97 диаметр инфузионного шприца уже был измерен, так что на (непоказанном здесь) дисплее инфузионного насоса 2 предлагается выбор соответствующих инфузионных шприцев 5. После подтверждения верного инфузионного шприца 5 могут вводиться данные о желаемой инфузионной терапии, и инфузия может теперь запускаться, причем основной приводной блок 3 и тяговое устройство 6 находятся в третьем рабочем положении 62 согласно фиг. 4С, 7А и 7В. Таким образом, в третьем рабочем положении 62 тяговое устройство 6 заблокировано. Это означает, что оба удерживающих электромагнита 80, 81 обесточены.
Наиболее предпочтительно то, что при этом существует обесточенное состояние с точки зрения обоих удерживающих электромагнитов 80, 81, так что действие третьего рабочего состояния 62 может также обеспечиваться без подачи напряжения удерживающим электромагнитам 80, 81. Обе подвижные втулки 53, 56 сдвинуты направо внутри тягового ползуна 7, так как дальнейшая пружина 92 рассчитана более сильной, чем спиральная пружина 55. Обе створки 12 и 13 гайки остаются закрытыми в радиальном направлении, равно как и закрыто фиксирующее устройство 20 на основном приводном блоке 3.
Чтобы удерживающие электромагниты 80, 81 могли обесточиваться наиболее быстро, приводное устройство 1 предпочтительным образом включает еще в себя схемный блок 100 сравнения (см. фиг. 1). Так как соответствующее магнитное поле удерживающих электромагнитов 80 и 81 создается при помощи подачи напряжения, предпочтительно, если для быстрого спада подачи напряжения допускается кратковременное повышенное напряжение. При помощи схемного блока 100 сравнения достигается наиболее быстрый спад запаса энергии в соответствующем удерживающем электромагните 80 или 81, так что время реакции для блокировки тягового устройства 6 можно сокращать еще больше.
Подразумевается, что, говоря о разъясненном выше примере осуществления, речь идет лишь о первом варианте осуществлении соответствующего изобретению приводного устройства. В этом отношении вариант осуществления изобретения не ограничивается этим примером осуществления.
Все раскрытые в материалах заявки признаки заявляются как существенные для изобретения, если они по отдельности или в сочетании друг с другом являются новыми по сравнению с уровнем техники.
Список ссылочных позиций
1 приводное устройство
2 инфузионный насос
3 основной приводной блок
3А корпус основного приводного блока
4 поршень инфузионного шприца
5 инфузионный шприц
6 тяговое устройство
7 тяговый ползун
8 тяговый шпиндель
9 составная гайка тягового шпинделя
10 направление приведения в движение поршня
11 продольная протяженность
12 первая створка гайки
13 вторая створка гайки
14 радиальное направление перемещения
15 наружная резьба
16 опорный кронштейн
17 основное контактное устройство
18 пластина поршня
19 основная контактная поверхность
20 фиксирующее устройство
20А первая стопорная скоба
20В вторая стопорная скоба
21 средства для приведения в действие
22 мембранная тарелка
22А датчик давления
23 устройство обнаружения
24 многопороговый сенсорный блок
25 передняя зона
26 пружина
27 сенсорный элемент
27А контактный элемент
28 устройство регистрации передней зоны
29 первый световой затвор
29А первое кабельное соединение
30 второй световой затвор
30А второе кабельное соединение
31 приводной механизм
32 сигнальный провод
33 блок управления
34 общее устройство управления и/или регулировки
35 корпус инфузионного насоса
36 рычаг управления
40 датчик для установки
41 датчик геометрического замыкания
42 приемный элемент
43 зажимная скоба
44 зажимная накладка
50 направление стрелки
51 устройство блокировки
52 приводной элемент
53 приводная втулка
54 средства ускорения
55 спиральная пружина или пружина приводной втулки
56 деблокирующая втулка
57 продольная протяженность
60 первое рабочее положение
61 второе рабочее положение
62 третье рабочее положение
64 область сцепления
65 опорная область
66 ось наклона
68 опора тягового ползуна
69 головная область
70 подножная область
71 область гайки тягового шпинделя
72 рампа
73 контропора
74 конец гайки тягового шпинделя
75 остановочное устройство
76 открытое положение
77 закрытое положение
78 дальнейшее открытое положение
79 дальнейшее закрытое положение
80 первый удерживающий электромагнит или магнит приводной втулки
81 второй удерживающий электромагнит или магнит деблокирующей втулки
82 первая магнитная тарелка
83 вторая магнитная тарелка
90 труба
91 фиксирующий вал
92 дальнейшая пружина или пружина деблокирующей втулки
93 первый электрический кабель
94 второй электрический кабель
97 потенциометр
100 схемный блок сравнения
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНФУЗИОННЫЙ НАСОС С ПРИВОДНЫМ УСТРОЙСТВОМ И БЛОКИРОВОЧНЫМ МЕХАНИЗМОМ ДЛЯ ПРИВОДНОЙ ГОЛОВКИ ПОРШНЯ ИНФУЗИОННОГО ШПРИЦА | 2012 |
|
RU2619999C2 |
| ИНФУЗИОННАЯ СИСТЕМА И ЕЕ КОМПОНЕНТЫ | 2018 |
|
RU2757312C2 |
| ИНФУЗИОННЫЙ НАСОС | 2003 |
|
RU2325927C2 |
| ДЕТЕКТОРНЫЕ УЗЛЫ ДЛЯ ИНФУЗИОННЫХ ПОМП | 2019 |
|
RU2800893C2 |
| ИНФУЗИОННЫЙ НАСОСНЫЙ УЗЕЛ | 2008 |
|
RU2510758C2 |
| УСТРОЙСТВО И ФУТЛЯР ДЛЯ ИНФУЗИОННОЙ АППАРАТУРЫ | 2011 |
|
RU2567820C2 |
| АМБУЛАТОРНОЕ ИНФУЗИОННОЕ УСТРОЙСТВО | 2017 |
|
RU2754196C2 |
| Инфузионный прибор для управления инъекционными шприцами | 1979 |
|
SU969274A1 |
| ИНФУЗИОННЫЙ НАСОС С ДОЗИРУЮЩИМ УСТРОЙСТВОМ ЦИЛИНДР-ПОРШЕНЬ И ОПТИЧЕСКИМ ДЕТЕКТИРОВАНИЕМ ПОЛОЖЕНИЯ ПОРШНЯ | 2012 |
|
RU2575307C2 |
| ИНИЦИАЛИЗАЦИЯ АМБУЛАТОРНОЙ ИНФУЗИОННОЙ СИСТЕМЫ | 2017 |
|
RU2755697C2 |


Группа изобретений относится к медицинской технике. Приводное устройство для линейного перемещения поршня расположенного на инфузионном насосе инфузионного шприца с основным приводным блоком, который включает в себя основное контактное устройство для создания опоры для поршня инфузионного шприца, фиксирующее устройство для фиксации поршня инфузионного шприца на основном контактном устройстве, а также средства для приведения в действие фиксирующего устройства, и с тяговым устройством для основного приводного блока, которое включает в себя приводимый в движение мотором тяговый шпиндель и составную гайку тягового шпинделя, которая имеет по меньшей мере одну подвижную в радиальном направлении створку гайки. Основной приводной блок дополнительно включает устройство обнаружения для обнаружения поршня инфузионного шприца перед основным контактным устройством. Устройство обнаружения имеет многопороговый сенсорный блок с, по меньшей мере, двухступенчатым устройством регистрации передней зоны для регистрации различных положений поршня инфузионного шприца перед основным контактным устройством. Раскрыты инфузионный насос и способ замены инфузионного шприца, использующие приводное устройство для линейного перемещения поршня. Группа изобретений позволяет повысить безопасность замены инфузионного шприца в инфузионном насосе. 3 н. и 11 з.п. ф-лы, 7ил.
1. Приводное устройство (1) для линейного перемещения поршня (4) расположенного на инфузионном насосе (2) инфузионного шприца (5) с основным приводным блоком (3), который включает в себя основное контактное устройство (17) для создания опоры для поршня (4) инфузионного шприца, фиксирующее устройство (20) для фиксации поршня (4) инфузионного шприца на основном контактном устройстве (17), а также средства (21) для приведения в действие фиксирующего устройства (20), и с тяговым устройством (6) для основного приводного блока (1), которое включает в себя приводимый в движение мотором тяговый шпиндель (8) и составную гайку (9) тягового шпинделя, которая имеет по меньшей мере одну подвижную в радиальном направлении створку (12, 13) гайки, причем основной приводной блок (3) дополнительно включает в себя устройство (23) обнаружения для обнаружения поршня (4) инфузионного шприца перед основным контактным устройством (17), отличающееся тем, что устройство (23) обнаружения имеет многопороговый сенсорный блок (24) с, по меньшей мере, двухступенчатым устройством (28) регистрации передней зоны для регистрации различных положений поршня (4) инфузионного шприца перед основным контактным устройством (17).
2. Приводное устройство (1) по п. 1, отличающееся тем, что многопороговый сенсорный блок (24) имеет по меньшей мере два датчика (29, 30), которые выполнены с возможностью приведения в действие при помощи единственного сенсорного элемента (27), причем сенсорный элемент (27) включает в себя контактный элемент (27А), который выступает за основное контактное устройство (17).
3. Приводное устройство (1) по п. 1 или 2, отличающееся тем, что устройство (23) обнаружения включает в себя по меньшей мере два световых затвора (29, 30), которые расположены аксиально друг за другом внутри основного приводного блока (3).
4. Приводное устройство (1) по п. 3, отличающееся тем, что по меньшей мере один из обоих световых затворов (29, 30) выполнен в виде вилочного светового затвора.
5. Приводное устройство (1) по п. 1 или 2, отличающееся тем, что основное контактное устройство (17) имеет мембранную тарелку (22), которая включает в себя имеющий контактный элемент (27А) сенсорный элемент (27) для включения датчиков (29, 30) многопорогового сенсорного блока (24).
6. Приводное устройство (1) по п. 2, отличающееся тем, что единственный сенсорный элемент (27) многопорогового сенсорного блока (24) расположен внутри средств (21) для приведения в действие фиксирующего устройства (20).
7. Приводное устройство (1) по п. 2, отличающееся тем, что единственный сенсорный элемент (27) многопорогового сенсорного блока (24) имеет ход вперед со значением между 2 мм и 10 мм, предпочтительно со значением в 4 мм до того, как первая ступень двухступенчатого устройства (28) регистрации передней зоны имеет возможность приведения в действие единственным сенсорным элементом (27).
8. Приводное устройство (1) по п. 1 или 2, отличающееся тем, что приводное устройство (1) имеет по меньшей мере одно действующее в зависимости от устройства (23) обнаружения общее устройство (34) управления и/или регулирования для автоматического радиального сцепления упомянутой по меньшей мере одной подвижной в радиальном направлении створки (12, 13) гайки с тяговым шпинделем (8) и для инициации возврата в исходное положение основного контактного устройства (17) вплоть до поршня (4) инфузионного шприца, осуществляемого при помощи сцепленной в радиальном направлении гайки (9) тягового шпинделя.
9. Приводное устройство (1) по п. 8, отличающееся тем, что общее устройство (34) управления и/или регулирования включает в себя схемный блок (100) сравнения для включения удерживающих электромагнитов (80, 81).
10. Приводное устройство (1) по п. 1 или 2, отличающееся тем, что тяговое устройство (6) включает в себя управляемые при помощи устройства (23) обнаружения удерживающие электромагниты (80, 81) для приведения в действие перемещаемых в осевом направлении подвижных втулок (53, 56) для радиального сцепления гайки (9) тягового шпинделя с тяговым шпинделем (8).
11. Инфузионный насос (2) с основным приводным блоком (3) для перемещения поршня (4) расположенного на инфузионном насосе (2) инфузионного шприца (5) и с тяговым устройством (6) для приведения в действие основного приводного блока (3), отличающийся тем, что инфузионный насос (2) включает в себя приводное устройство (1) по одному из пп. 1-10.
12. Способ замены инфузионного шприца (5) в инфузионном насосе (2) с основным приводным блоком (3) для линейного перемещения поршня (4) инфузионного шприца, при котором по меньшей мере одну подвижную в радиальном направлении створку (12, 13) гайки (9) тягового шпинделя отцепляют в радиальном направлении от тягового шпинделя (8) тягового устройства (6) для приведения в действие основного приводного блока (3), так что обеспечивается возможность доставки основного приводного блока (3) в осевом направлении вручную к пластине (18) поршня (4) инфузионного шприца, и при котором для предотвращения непреднамеренной выдачи разовой дозы обнаруживают пластину (18) поршня контактным элементом (27А), который согласован с основным приводным блоком (3), до того, как пластина (18) поршня вступает в контакт с основной контактной поверхностью (19) основного контактного устройства (17) основного приводного блока (3), отличающийся тем, что:
- на первом шаге обнаружения контактный элемент (27А) приводит в действие первый сенсорный элемент (29), вследствие чего доставка вручную основного приводного блока (3) при помощи гайки (9) тягового шпинделя и самого тягового шпинделя (8) блокируется за счет того, по меньшей мере одна подвижная в радиальном направлении створка (12, 13) гайки сцепляется в радиальном направлении с тяговым шпинделем (8), причем затем основной приводной блок (3) доставляют далее до пластины (18) поршня с помощью тягового устройства (6) с приведением в действие мотором,
- на втором шаге обнаружения контактный элемент (27А) приводит в действие второй сенсорный элемент (30), вследствие чего инициируется осуществляемый мотором возврат в исходное положение основного приводного блока (3) вплоть до основной контактной поверхности (19) основного контактного устройства (17), и
- на третьем шаге обнаружения в ходе контакта пластины (18) поршня с основной контактной поверхностью (19) осуществляемый мотором возврат в исходное положение останавливают и закрывают стопорные скобы (20A, 20В) фиксирующего устройства (20) для пластины (18) поршня, вследствие чего пластина (18) поршня фиксируется на основном контактном устройстве (17).
13. Способ по п. 12, отличающийся тем, что доставку вручную основного приводного блока (3) блокируют до того, как контактный элемент (27А) приводит в действие второй сенсорный элемент (30).
14. Способ по п. 12 или 13, отличающийся тем, что осуществляемый мотором возврат в исходное положение выполняют при помощи определенного количества шагов мотора.
| US 5879360 A, 09.03.1999 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Сплав на основе алюминия | 1958 |
|
SU514907A1 |
| Устройство для резки труб | 1982 |
|
SU1110569A1 |
| УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ ЛЕКАРСТВЕННЫХ ПРЕПАРАТОВ | 1991 |
|
RU2012358C1 |

