Уровень техники
Настоящее изобретение, в общем, относится к технологиям, в которых используются текучие среды, и датчикам, использующимся для измерения переменных величин процесса, таких как давление, температура, уровень и расход. Конкретнее, изобретение относится к термокарманам, использующимся для считывания температуры текучих сред. Однако изобретение можно применять для любого зонда, содержащего датчик, расположенный в корпусе, предназначенном для размещения в потоке технической текучей среды. Термокарманы традиционно содержат трубку, проходящую через стенку трубопровода для текучей среды, например трубу, так что наружная часть трубки находится в тепловом контакте с технологической текучей средой. Датчик температуры, например термопара или резистивный температурный датчик (RTD), находится в тепловом контакте с внутренней частью трубки для измерения температуры технологической текучей среды. Проводка, проходящая через трубку, соединяет датчик температуры с электронными устройствами передатчика, которые обычно соединены электронными средствами связи с сетью управления технологическим процессом посредством проводной или беспроводной сети. В связи с этим температуру, считанную с датчика температуры, можно обрабатывать и передавать на рабочую станцию в пункт управления технологическим процессом.
Трубка датчика в трубопроводе для текучей среды подвергается воздействию сил, возбуждаемых потоком текучей среды. В частности, трубка датчика подвергается некоторому количеству факторов, вызывающих напряжения, включая колебания, возбуждаемые потоком жидкости. Колебания, возбуждаемые потоком текучей среды, обычно возникают в результате вихревого потока и других эффектов поля турбулентного потока, которые периодически создают знакопеременные силы, вызывающие резонанс трубки датчика. Эти силы побуждают трубку качаться назад и вперед или колебаться, увеличивая механическое напряжение и сокращая срок службы как трубки датчика, так и связанного с ней датчика. Колебания, возбуждаемые потоком текучей среды, крайне нежелательны, если они возникают возле собственных резонансных частот, создавая усиленные резонансные колебания, в результате которых теоретически может произойти внезапный отказ, например, от повторяющегося усталостного напряжения. Даже относительно небольшие колебания также могут быть проблемой, особенно в сочетании с другими напряжениями, такими как силы лобового сопротивления, или градиентами статического давления, коррозией, усталостью или эрозией конструкции трубки датчика.
Для скоростей потока, при которых можно использовать конкретные термокарманы во избежание резонансных частот, генерирующих значительные вибрационные нагрузки, приняты рекомендации, например, описанные в ASME PTC 19.3. Проблемы, относящиеся к колебаниям трубки датчика, прежде всего, касаются увеличения прочности трубки датчика. При таком подходе к решению проблемы требуются более толстые стенки трубки или специальная конструкция, что повышает стоимость, увеличивает размер и вес корпуса устройства, снижает чувствительность и увеличивает время отклика. В качестве альтернативы трубки датчика сконфигурированы для уменьшения вихревого потока (который вызывает колебания, возбуждаемые потоком текучей среды), например, посредством введения в состав элементов для разрыва потока, которые вызывают отделение граничного слоя над трубкой для уменьшения сплошности вихревого потока. Например, в документе США № 7836780, выданного Garnett и др., переуступленного Rosemount Inc., описывается использование спирального элемента для изменения потока. Однако даже при таком подходе к уменьшению колебаний датчик в трубке все еще подвергается нагрузке, достаточно высокой для возможного повреждения датчика после продолжительного использования. Таким образом, существует необходимость в дальнейшем снижении нагрузки, особенно колебательной, на таких трубках, которые используются в термокарманах и датчиках для измерения средней скорости потока трубкой Пито.
Сущность изобретения
Настоящее изобретение относится к сенсорному зонду для считывания характеристик текучей среды, протекающей в трубопроводе для текучей среды. Сенсорный зонд содержит трубку, чувствительный элемент и поглощающую массу. Трубка предназначена для размещения в потоке технологической текучей среды в трубопроводе для текучей среды и содержит первый торец для соединения с трубопроводом для текучей среды и второй торец для помещения в поток технологической текучей среды. Чувствительный элемент соединен с трубкой. Поглощающая масса соединена с трубкой и сконфигурирована для демпфирования колебаний трубки при ее помещении в поток технологической текучей среды.
Краткое описание графических материалов
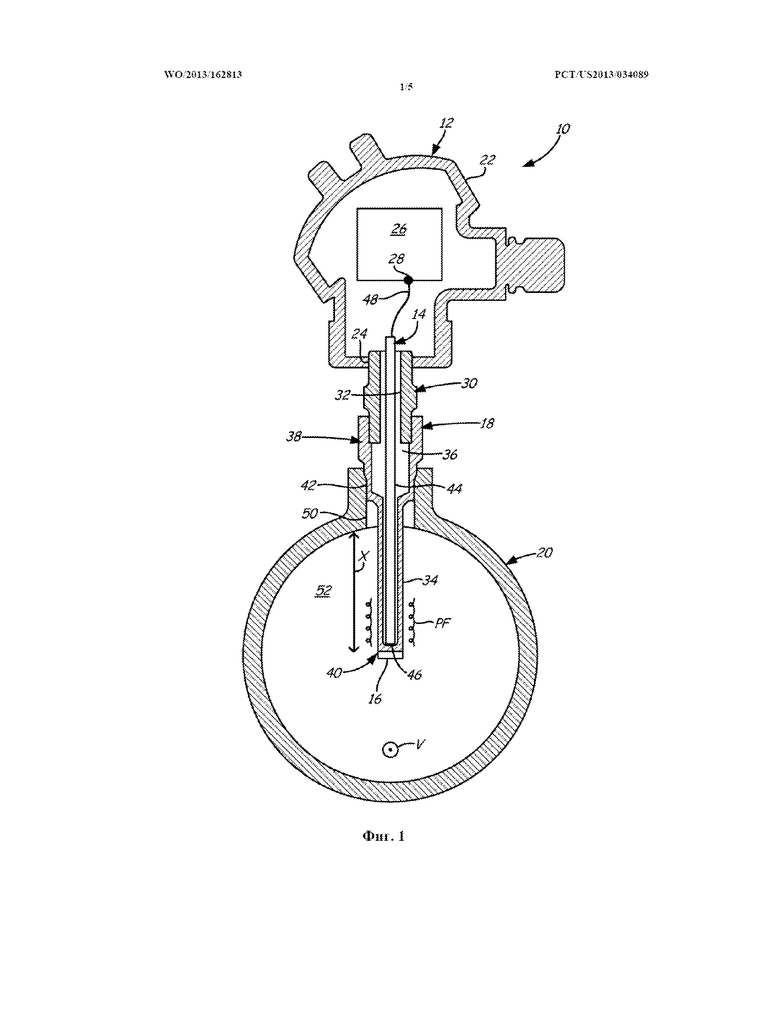
На фиг. 1 представлен схематический вид поперечного сечения промышленного передатчика, содержащего датчик температуры и массу для поглощения колебаний, соединенную с термокарманом, помещенным в промышленный трубопровод для текучей среды.
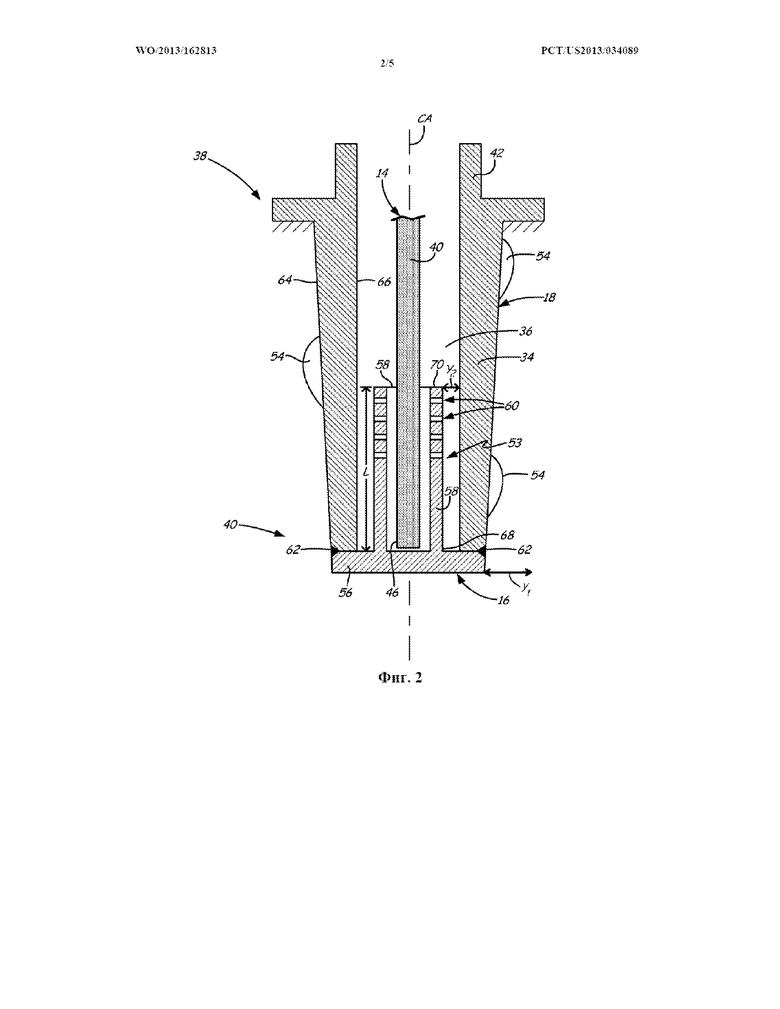
На фиг. 2 представлен вид поперечного сечения по продольной оси термокармана по фиг. 1, в котором масса для поглощения колебаний содержит консольную балку, закрепленную с внутренней стороны.
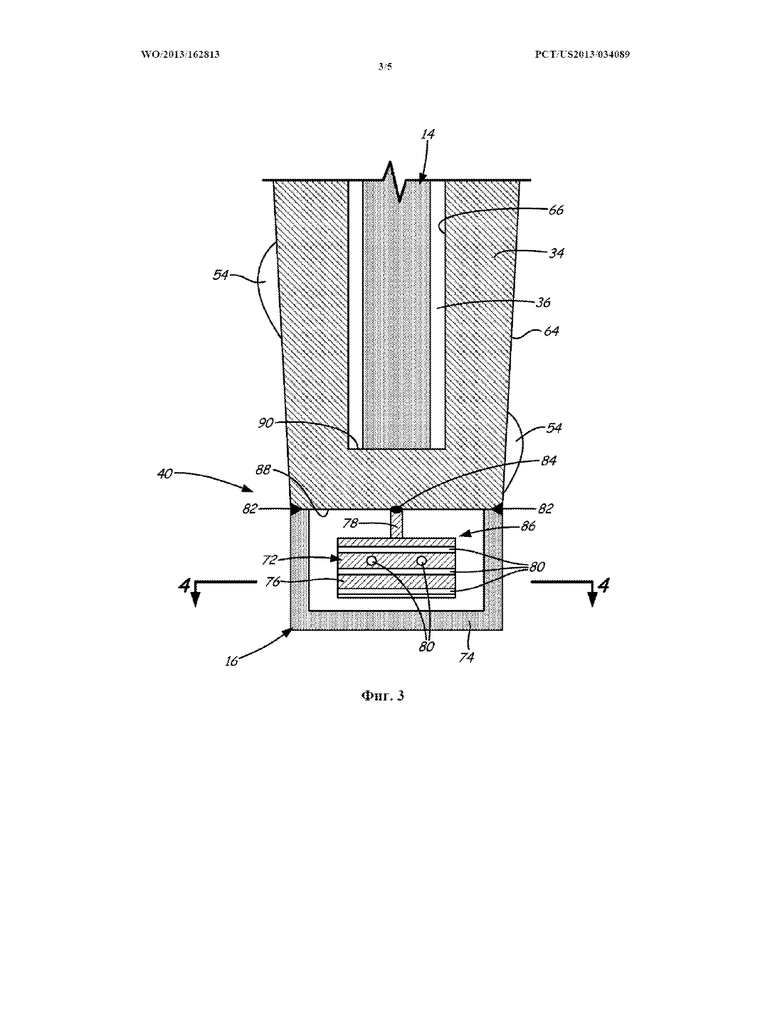
На фиг. 3 представлен вид поперечного сечения по продольной оси термокармана по фиг. 1, в котором масса для поглощения колебаний содержит маятник, установленный снаружи.
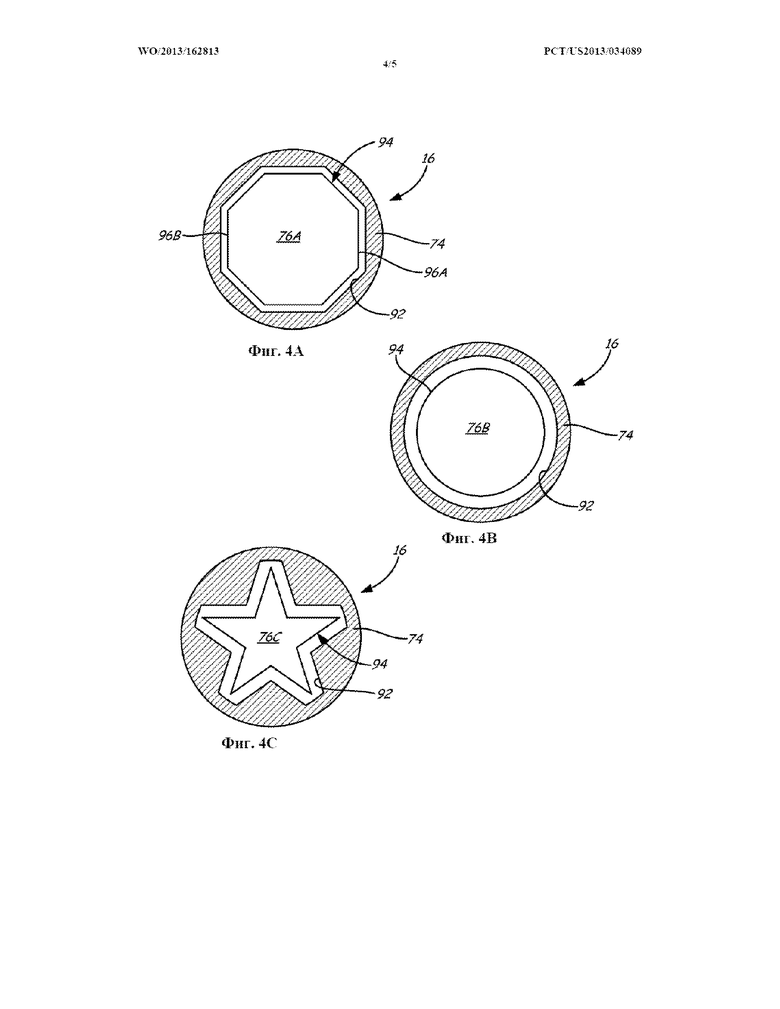
На фиг. 4A – 4C представлены поперечные сечения боковой части термокармана по фиг. 3, где различные формы масс для поглощения колебаний сконфигурированы для дополнительного осуществления демпфирования за счет сжатой пленки.
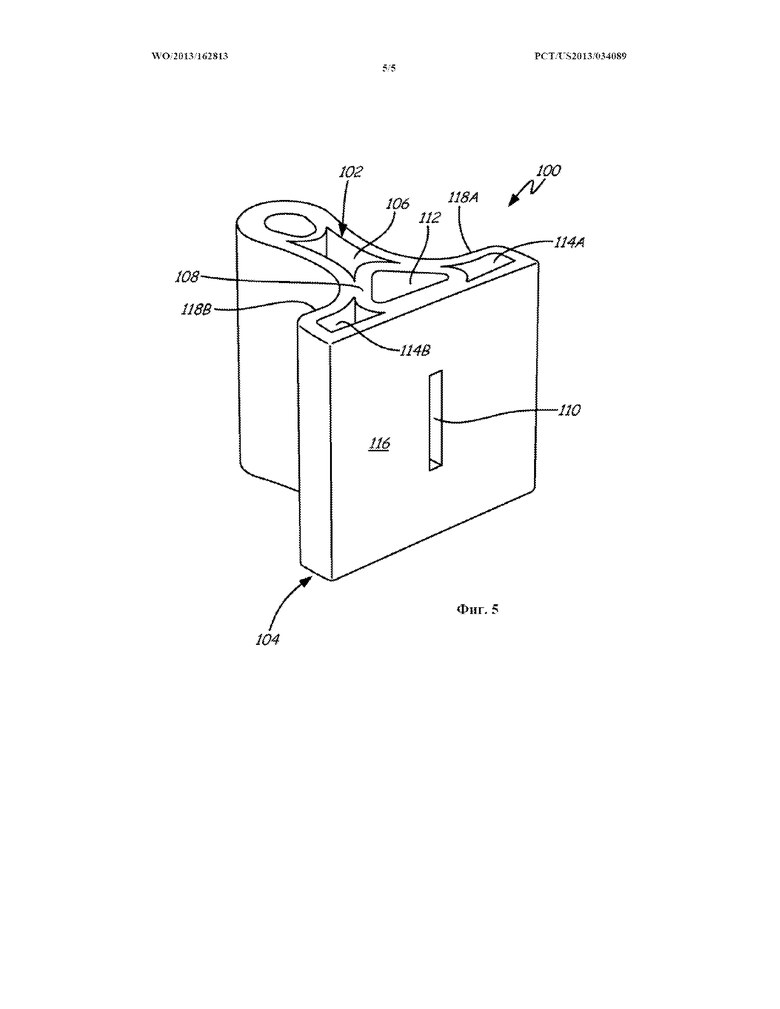
На фиг. 5 представлен частичный вид в перспективе другого варианта осуществления изобретения, в котором корпус датчика содержит датчик для измерения средней скорости потока трубкой Пито, к которому может быть прикреплена масса для поглощения колебаний.
Подробное описание изобретения
На фиг. 1 представлен схематический вид одного варианта осуществления изобретения, на котором показан промышленный передатчик 12, содержащий датчик 14 температуры и массу 16 для поглощения колебаний, соединенную с термокарманом 18, который помещен в трубу или трубопровод 20 с технологической текучей средой. Передатчик 12 также содержит корпус 22 передатчика, сквозное отверстие 24 в корпусе, схему 26 передатчика, вход 28 датчика температуры и соединительный элемент 30 термокармана с каналом 32. Термокарман 18 содержит трубку 34, высверленную полость 36 для термокармана, первый торец 38, второй торец 40 и часть 42 технологического соединения. Датчик 14 температуры содержит защитную трубку 44, наконечник 46 датчика температуры и вывод 48 датчика температуры. Термокарман 18, содержащий датчик 14 температуры и трубку 34, содержит зонд для помещения в поток технологической текучей среды.
В корпус 22 передатчика помещены внутренние составные части передатчика 12, включая схему 26 передатчика. Схема 26 передатчика содержит вход 28 датчика температуры, который электрически соединен с датчиком 14 температуры через вывод 48 датчика температуры. Как известно из уровня техники, в различных вариантах осуществления изобретения датчик 14 температуры содержит любое чувствительное к изменению температуры устройство. Например, датчик 14 температуры может содержать термопару или резистивный температурный датчик (RTD). В других вариантах осуществления изобретения в трубку 34 могут помещать другие типы датчиков, например датчики давления, датчики уровня или датчики потока. Датчик 14 температуры помещен в длинную, цилиндрическую защитную трубку 44. Вывод 48 датчика температуры содержит несколько проводов для создания нескольких электрических соединений с несколькими узлами на каждом из входов 28 датчика температуры в схеме 26. Как известно из уровня техники, схема 26 передатчика может быть соединена с пунктом управления, при этом можно контролировать выход датчика температуры 14, посредством, либо проводного контура управления, либо беспроводной сети.
В соответствии с данным вариантом осуществления первый торец соединительного элемента 30 термокармана помещают в сквозное отверстие 24 корпуса 22, а второй торец соединительного элемента 30 термокармана помещают в термокарман 18. Первый торец 38 термокармана 18 вмещает соединительный элемент 30, и при этом данный термокарман соединен с трубой 20 с технологической текучей средой посредством соединительной части 42, которая расположена между торцами 38 и 40. Второй торец 40 помещен в сквозное отверстие 50 в трубе 20 с технологической текучей средой. Канал 32 соединительного элемента 30 термокармана соединяет внутреннюю часть корпуса 22 с высверленной полостью 36 для термокармана в термокармане 18. Трубка 44 датчика 14 проходит от внутренней части корпуса 22 через канал 32 в высверленную полость 36 для термокармана. Трубка 44 может не соприкасаться с термокарманом 18, но в различных вариантах осуществления это может реализовываться для увеличения теплообмена между двумя телами, как показано на фиг. 3. Термокарман 18 помещают в проточный канал 52 в трубе 20, так что второй торец 40 находится на пути турбулентного потока технологической текучей среды PF. В альтернативных вариантах осуществления труба 20 может представлять собой любой трубопровод, в котором потоки технологической текучей среды вызывают колебания трубки 34.
Для изображенного варианта осуществления технологическая текучая среда PF протекает через трубу 20 в осевом направлении, перпендикулярно плоскости фиг. 1, как показано вектором скорости V. Термокарман 18 проходит в поперечном направлении x, перпендикулярно осевому направлению, как указано стрелкой X. Термокарман 18 также может проходить в трубе 20 под углом относительно осевого направления или поперечного направления. Термокарман 18 не имеет конкретной направленности относительно вращения вокруг поперечной оси и поэтому может быть установлен в сквозное отверстие 50 в любом направлении вращения. В любом случае вектор скорости V технологической текучей среды PF достаточно велик для возбуждения колебаний трубки 34.
В показанном варианте осуществления термокарман 18 содержит удлиненную трубку 34 с высверленной полостью 36, открытой на первом торце 38 и закрытой на втором торце 40. Трубка 34 содержит корпус датчика для вмещения датчика 14 температуры или других датчиков. Трубка 34 может содержать другие отверстия для доступа в соответствии с требованиями для размещения датчика давления, датчика уровня или датчика потока. Например, трубка 34 может содержать герметичный патрубок для обеспечения возможности осуществлять считывание давления датчиком давления непосредственно от технологической текучей среды. В варианте осуществления по фиг. 1 трубка 34 содержит цилиндр, имеющий площадь поперечного сечения в виде круга, с постоянным диаметром по поперечной длине трубки. Таким образом, трубку 34 равномерно вращают вокруг поперечной оси, так что расстояние между наружным диаметром трубки 34 и трубки 44 является одинаковым по поперечной длине трубки 34. Трубка 34 может содержать другие типы вращаемых цилиндрических тел, которые находятся не на одинаковом расстоянии от поперечной оси, проходящей через трубку 44. Как показано на фиг. 2 и 3, трубка 34 термокармана 18 может иметь более широкий диаметр возле первого торца 38 и более узкий диаметр возле второго торца 40 для того, чтобы иметь конусообразную форму. В других вариантах осуществления трубка 34 может быть ступенчатой в поперечном направлении, а не конусообразной. В других вариантах осуществления трубка 34 может иметь не круглое поперечное сечение, включая, кроме прочего, поперечные сечения в виде прямоугольников, овальные поперечные сечения и Т-образные поперечные сечения.
Часть 42 технологического соединения термокармана 18 соединена со сквозным отверстием 50 в трубе 20. В изображенном варианте осуществления часть 42 технологического соединения имеет резьбу для ввинчивания в сопряженную резьбу в сквозном отверстии 50 трубы 20, но для закрепления термокармана в трубе может быть использовано много других видов приспособлений. Часть 42 технологического соединения способствует герметизации промышленного процесса, так что технологические текучие среды не вытекают из канала 52 к наружной трубе 20. Часть 42 технологического соединения также отделяет задействованную в технологическом процессе сторону термокармана 18 от стороны термокармана 18, не задействованной в технологическом процессе. Сторона термокармана 18, не задействованная в технологическом процессе, содержит все части термокармана 18, которые изолированы от технологической текучей среды, например высверленную полость 36, проходящую через внутреннюю часть термокармана 18, и наружную часть первого торца 38, а также часть 42 технологического соединения. Высверленная полость 36 имеет размеры, позволяющие вмещать датчик 14 температуры таким образом, чтобы наконечник 46 датчика температуры находился возле второго торца 40. Улучшенного теплообмена между наконечником 46 датчика и термокарманом 18 можно достичь заполнением трубки 34 текучей средой-теплоносителем или соприкосновением наконечника 46 датчика с термокарманом 18, как показано на фиг. 3. Часть задействованной в технологическом процессе стороны термокармана 18 подвергается воздействию потока технологических текучих сред в трубе 20, особенно возле отдаленного наконечника второго торца 40 в канале 52.
Осевой поток технологической текучей среды над задействованной в технологическом процессе стороной термокармана 18 образует различные усилия, которые локализированы напротив термокармана 18. Для сравнения, скорость осевого потока является функцией положения поперек потока x (измеренного перпендикулярно трубе 20), а средняя скорость потока V находится напротив технологической структуры потока. Эти эпюры скоростей являются характеристиками турбулентного потока, который включает неоднородные поля потока, проходящие в осевом направлении и наклоненные к осевому направлению. Таким образом, турбулентные поля потока образуют два источника входного потока, который вызывает колебания термокармана 18. Во-первых, турбулентный поток содержит энергию, которая распределяется по широкому спектру частот. Во-вторых, взаимодействие конструкции термокармана с турбулентным потоком текучей среды вызывает когерентные явления в текучей среде на определенных частотах.
Были предприняты значительные усилия для снижения колебаний от турбулентного потока путем уменьшения вихревого потока посредством способов, которые вызывают отделение граничного слоя в различных положениях по длине термокармана. Это снижает когерентность вихрей и амплитуду усилий, прикладываемых к термокарману со стороны турбулентного потока. Как указано, в документе США №7836780, который включен в данный документ посредством ссылки, описываются различные изменения, которые можно производить с формой и наружной поверхностью термокармана 18 с целью уменьшения вихревого потока до приемлемых уровней.
Тем не менее является желательным дальнейшее уменьшение колебаний термокармана 18 для исключения возможности появления колебаний с резонансной частотой, которые могут появиться в результате широкого спектра частот, которым подвергается трубка 34. Например, даже после проведения регулировки для уменьшения вихревого потока, в технологической текучей среде останется достаточно энергии для возбуждения термокармана на его резонансной частоте. Возбуждение механических резонансов за счет энергии в турбулентном потоке описано автором Uriel Fisch в «Turbulence: The Legacy of A.N. Kolmogorov» («Турбулентность: Теория А.Н. Колмогорова»), Cambridge University Press, 1995, где также описаны сложности в устранении резонансных колебаний. В настоящем изобретении масса 16 для поглощения колебаний расположена на термокармане 18 для уравновешивания сил вибрации от турбулентного потока технологической текучей среды с целью снижения максимальных амплитуд по диапазону частот. В частности, параметры массы, коэффициента упругости и коэффициента затухания массы 16 для поглощения колебаний могут быть выбраны для уменьшения амплитуды в выбранном диапазоне вероятных частот. Отношения массы, коэффициента упругости и демпфирование для стандартных тел были описаны автором J.P. Den Hartog в «Mechanical Vibrations», 4-е издание, J.P. Den Hartog, McGraw Hill Book Company, 1956, где также описывается взаимосвязанное уменьшение амплитуды для оптимального выбора параметра. В настоящем изобретении эти отношения были адаптированы и применены к термокарману 18 и массе 16 для поглощения колебаний с целью исключения колебаний резонансной частоты термокармана 18 для выбранных полей потока.
В соответствии с одним вариантом осуществления фиг. 2 представляет собой вид поперечного сечения по продольной оси термокармана по фиг. 1, в котором масса 16 для поглощения колебаний содержит консольную балку 53, закрепленную с внутренней стороны. Термокарман 18 также содержит трубку 34, высверленную полость 36 для термокармана, первый торец 38, второй торец 40, часть 42 технологического соединения и элемент 54 для изменения потока. Консольная балка 53, закрепленная с внутренней стороны, преимущественно содержит плиту 56, полый цилиндр 58 и сквозные отверстия 60. Поглощающая масса 16 присоединена к трубке 34 сварным соединением 62.
Часть 42 технологического соединения соединена с корпусом 22 передатчика (фиг. 1) посредством, например, резьбового соединения. Часть 42 технологического соединения также может содержать уплотнение, например уплотнительное кольцо, для установки вокруг трубки 40 датчика в части 42. Таким образом, полость 36 отделена от потока технологической текучей среды, тогда как наружная часть трубки 34 подвергается турбулентному потоку текучей среды. Трубка 40 датчика 14 температуры проходит от корпуса 22 передатчика (фиг. 1) в полость 36 трубки 34, так что наконечник 46 располагают в непосредственной близости к поглощающей массе 16 на втором торце 40. Как отмечалось выше, наконечник 46 датчика может быть сконфигурирован для соприкосновения со вторым торцом 40. В показанном варианте осуществления второй торец 40 трубки 34 открыт, тогда как плита 56 герметично закрывает отверстие второго торца.
Трубка 34 и трубка 40 датчика температуры проходят в целом вертикально от корпуса 22 параллельно центральной оси CA. Центральная ось CA проходит поперек осевому потоку текучей среды. В конкретном варианте осуществления по фиг. 2 наружная поверхность 64 трубки 34 постепенно сужается от первого торца 38 ко второму торцу 40 относительно центральной оси CA. Таким образом, стенки трубки 34 толще на первом торце 38, чем на втором торце 40. Тем не менее внутренняя поверхность 66 проходит в целом вертикально, параллельно центральной оси CA. Другими словами, наружная поверхность 64 наклонена относительно внутренней поверхности 66. Как описано выше, при необходимости могут использоваться другие формы трубки 34, например округлый цилиндрический корпус, для уменьшения гидродинамического сопротивления, увеличения скоростного напора уменьшенного вихревого потока. В качестве примера элемент 54 для изменения потока расположен на наружной поверхности 64 для уменьшения вихревого потока. В описанном варианте осуществления элемент 54 для изменения потока содержит спиральное ребро, которое обвивает наружную поверхность 64, как описано в вышеупомянутом патенте Garnett и др. Следует принять во внимание, что трубка 34 может использовать поглощающую массу без использования элемента для изменения потока.
В данном варианте осуществления плита 56 поглощающей массы 16 закрывает второй торец 40 для сохранения полости 36 в изолированном от потока технологической текучей среды состоянии. Таким образом, в показанном варианте осуществления плита 56 имеет такой же внешний диаметр, что и наружная поверхность 64 трубки 34. Полый цилиндр 58 содержит продолговатое кольцеобразное тело или трубку с боковой стенкой, которая непрерывно окружает трубку 40 датчика. Цилиндр 58 может иметь круглую, т.е. кольцеобразную, или прямоугольную, т.е. коробчатую, площадь поперечного сечения A0. Полый цилиндр 58 проходит в полость 36 от плиты 56 так, чтобы располагаться концентрически вокруг трубки 40 датчика. Полый цилиндр 58 проходит перпендикулярно от плиты 56 соосно центральной оси CA по длине L. Однако цилиндр 58 может быть расположен в другом направлении. Закрепленный торец 68 присоединен к плите 56, тогда как свободный торец 70 является незакрепленным для того, чтобы иметь возможность перемещаться в полости 36 на расстояние y2. Таким образом, цилиндр 58 также параллелен как внутренней поверхности 66, так и трубке 40. В других вариантах осуществления поглощающая масса 16 может содержать одну или несколько консольных балок сплошного сечения, проходящих от плиты 56 к окруженной с промежутками трубке 40 датчика. Например, четыре балки, имеющие сплошную, квадратную площадь поперечного сечения, могут быть разнесены на девяносто градусов по периметру трубки 40 датчика.
Плита 56 и полый цилиндр 58 преимущественно изготовлены как одно целое из одинакового материала, чтобы образовать цельное изделие. В других вариантах осуществления они могут быть выполнены в виде отдельных изделий, соединенных вместе любыми подходящими средствами, например сваркой или посредством резьбового соединения. Для более простого выполнения сварного соединения 62 поглощающая масса 16 может быть выполнена из того же материала, что и трубка 34. Однако в других вариантах осуществления поглощающая масса 16 выполнена из другого материала. В одном варианте осуществления поглощающая масса 16 и трубка 34 выполнены из нержавеющей стали. В другом варианте осуществления поглощающая масса 16 прикреплена к трубке 34 посредством других механических приспособлений, например при помощи использования резьбового соединения между плитой 56 и трубкой 34.
Так как термокарман 18 подвергается воздействию турбулентного потока, например, от технологической текучей среды PF (фиг. 1), то трубка 34 колеблется с определенными частотами и амплитудами, которые зависят от скорости потока технологической текучей среды и физических свойств трубки 34. Колебания трубки 34 приводят к колебаниям с частотами ω и амплитудами a. Слабое демпфирование осуществляется за счет технологической текучей среды или других факторов. Колебания термокармана 18 с таким слабым демпфированием описаны дифференциальным уравнением второго порядка. Термокарман 18 колеблется в соответствии с уравнением (1), где M – масса термокармана 18, C – коэффициент затухания термокармана 18, K – коэффициент упругости термокармана 18, y1 – отклонение термокармана 18, t – время и P0 sin(ωt) – движущая сила входного потока, определенная амплитудой a и частотой ω колебаний.
Термокарман 18 сам по себе функционирует как система второго порядка (коэффициент упругости K и коэффициент затухания C) с одной степенью свободы. Слабое демпфирование, естественно создаваемое консольной балкой в текущей текучей среде, равно коэффициенту затухания C, значительно меньшему чем 0.1. При таком слабом демпфировании колебание термокармана 18 на резонансной частоте многократно усиливается и вызывает знакопостоянные циклы напряжений, которые могут приводить к механическому отказу.
В настоящем изобретении поглощающая масса 16 присоединена к термокарману 18 для уравновешивания колебательного движения термокармана 18, таким образом, функционируя как демпфер. Поглощающая масса 16 согласно настоящему изобретению может достигать намного больших коэффициентов затухания, таким образом, уменьшая максимальную амплитуду отклонения при резонансе. Например, колебание термокармана 18 на втором торце 40 вызывает соответствующее движение закрепленного торца 68 балки 58, что вызывает смещение свободного торца 70 на расстояние y2. Характеристики балки 58, такие как модуль упругости E, момент инерции I, длина l и площадь поперечного сечения A0 обуславливают поглощающую массу 16, имеющую конкретную массу m, коэффициент упругости k и коэффициент затухания c, которые обеспечивают демпфирующее или поглощающее тело, которое уравновешивает колебания термокармана 18. Поглощающая масса 16 и термокарман 18 колеблются в соответствии с уравнениями (2) и (3), где сила входного потока P0 sin(ωt) является движущей силой, определяемой амплитудой a и частотой ω колебаний.
Увеличение поглощающей массы 16 приводит к системе второго порядка (коэффициенты упругости K и k, а также коэффициенты затухания C и c) с двумя степенями свободы. Отметим, что в уравнениях (2) и (3) демпфированием, обусловленным массой M, пренебрегают, так что уравнение, выражающее коэффициент затухания C, опускают для упрощения. Используя известные соотношения, выбирают массу m, длину l, площадь поперечного сечения A0, момент инерции I и модуль упругости E массы 16 для поглощения колебаний, например, балки 53, для более точного совпадения с резонансной частотой трубки 34. Выбранная таким образом балка 58 прикладывает положительную и отрицательную силу, вызывающую колебательное движение, к термокарману 18 для демпфирования колебаний, сообщенных от потока технологической текучей среды. Поведение данной системы таково, что амплитуда на резонансной частоте трубки 34 значительно уменьшена, таким образом снижая уровни напряжения и улучшая и повышая ее сопротивление усталостным отказам.
Для дополнительного способствования в осуществлении демпфирования колебаний термокармана 18 поглощающей массой 16 трубка 34 может быть заполнена текучей средой, например жидкостью или газом, для достижения необходимого коэффициента затухания c балки 53. В частности, в балке 53 предусмотрены сквозные отверстия 60, через которые текучая среда имеет возможность перетекать при движении балки. Движение балки 53 в текучей среды вызывает силу торможения, которая пропорциональна скорости балки, таким образом, обеспечивая необходимое значение коэффициента затухания c. Как показано, сквозные отверстия 60 проходят радиально сквозь цилиндр 58 так, чтобы быть ориентированными в различных направлениях относительно центральной оси CA. Для достижения необходимого коэффициента затухания могут быть выбраны текучая среда, количество сквозных отверстий и размер сквозных отверстий. При движении текучей среды возле балки 53 к балке 53 без сквозных отверстий также будут приложены демпфирующие силы. Как известно из уровня техники, текучая среда также может быть подобрана для увеличения теплообмена между термокарманом 18 и наконечником 46 датчика.
В соответствии с другим вариантом осуществления, фиг. 3 представляет собой вид поперечного сечения по продольной оси термокармана по фиг. 1, в котором масса 16 для поглощения колебаний содержит маятник 72, установленный снаружи. Термокарман 18 также содержит трубку 34, высверленную полость 36 для термокармана, второй торец 40 и элемент 54 для изменения потока, как описано выше. Поглощающая масса 16 содержит крышку 74, диск 76, стрежень 78 и сквозные отверстия 80. Крышка 74 присоединена к трубке 34 посредством сварного соединения 82, а стрежень 78 присоединен к трубке 34 посредством сварного соединения 84. Между трубкой 34 и крышкой 74 образована внутренняя область 86.
В варианте осуществления по фиг. 3 трубка 34 полностью закрыта на втором торце 40. Конкретнее, наружная поверхность 64 трубки 34 присоединена к торцевой поверхности 88. Аналогично внутренняя поверхность 66 присоединена к внутренней поверхности 90. Таким образом, высверленная полость 36 для термокармана изолирована от наружной части термокармана 18 посредством материала, составляющего одно целое с остальной частью трубки 34.
Стержень 78 преимущественно выполнен из того же материала, что и трубка 34, для облегчения формирования сварного соединения 84. Аналогично крышка 74 выполнена из того же материала, что и трубка 34 для облегчения формирования сварного соединения 82. В одном варианте осуществления крышка 74 и стержень 78 изготовлены из нержавеющей стали. В других вариантах осуществления крышка 74 и стержень 78 выполнены из материалов, отличных от тех, из которых выполнена трубка 34. В других вариантах осуществления крышка 74 и стержень 78 прикреплены к трубке 34 посредством других механических средств, например, посредством использования резьбового соединения. Например, стержень 78 может быть ввинчен в поверхность 88, тогда как крышка 74 может быть навинчена на наружную поверхность 64. Крышка 74 образует удлинение трубки 34. Диск 76 выполнен из любого подходящего материала, например такого же материала, что и стержень 78, или другой нержавеющей стали, и может быть прикреплен к стержню 78 посредством любых подходящих средств, например сварки, пайки или механического крепления.
В данном варианте осуществления крышка 74 проходит в осевом направлении вниз от поверхности 88 трубки 34. Крышка 74 содержит дискообразное цилиндрическое тело, которое устанавливают для образования внутренней области 86. Другими словами крышка 74 содержит плоскую, круглую торцевую стенку, окруженную боковой стенкой в форме тора. Однако крышка 74 может иметь другие формы для достижения необходимых результатов, например быть бочкообразной для снижения гидродинамического сопротивления. Крышка 74 имеет приблизительно такой же диаметр, что и торец 40 трубки 34 в изображенном варианте осуществления. Тем не менее крышка 74 может иметь другие размеры, например, меньшие, чем диаметр трубки 34. Внутренняя область 86 имеет размеры, обеспечивающие достаточную площадь для диска 76 для движения в крышке 74 при колебаниях. Поэтому крышка 74 достаточно глубокая для вмещения стержня 78 и диска 76, а также для обеспечения смещения диска 76.
Стержень 78 проходит в осевом направлении вниз от второго торца 40 трубки 34, обычно коаксиально датчику температуры 14. Однако стержень 78 может быть расположен в других направлениях. В одном варианте осуществления стержень 78 расположен по центру торцевой стороны 88 трубки 34. Стержень 78 имеет постоянное поперечное сечение для обеспечения равномерного во всех направлениях отклонения и коэффициента затухания c. В описанном варианте осуществления стержень 78 содержит цилиндрическое тело с плоскими торцевыми поверхностями для присоединения диска 76 и поверхности 88. Как показано, длина стержня 78 может быть больше диаметра стержня 78 для снижения коэффициента упругости k и увеличения маятникового эффекта. Однако для придания диску 76 маятникового эффекта, достаточного для обеспечения демпфирования, эта длина не должна быть больше диаметра. В показанном варианте осуществления диск 76 содержит цилиндрическое тело с плоскими торцевыми поверхностями. Диаметр диска 76 превышает высоту диска 76 для обеспечения компактного центра тяжести массе m для присоединения к стержню 78, таким образом, уменьшая опорную поверхность поглощающей массы 16 в потоке технологической текучей среды.
Колебания термокармана 18 вызывают перемещение стержня 78 и диска 76. Как и в случае варианта осуществления по фиг. 2, характеристики маятника 72 выбирают для поглощения колебаний термокармана 18, таким образом, предотвращая колебания при резонансе и накопление повторяющихся усталостных напряжений. Тем не менее маятник 72 содержит более сложную систему, в которой параметры как стержня 78, так и диска 76 могут быть изменены для создания необходимого демпфирования. Например, длина и диаметр стержня 78 будут особенно влиять на коэффициент упругости k, тогда как размер диска 76 будет особенно влиять на массу m маятника 72. Коэффициент затухания c исходит из силы затухания пропорционально скорости маятника 72 в условиях текучей среды.
Дополнительно диск 76 может преимущественно содержать отверстия 80, которые обеспечивают возможность текучей среды во внутренней области 86 воздействовать на коэффициент жесткости пружины k и коэффициент затухания c маятника 72. Отверстия 80 проходят сквозь диск 76 в различных направлениях для обеспечения демпфирования во множестве направлений. Например, по фиг.3 три отверстия проходят горизонтально по ширине диска 76, тогда как два отверстия показаны проходящими непосредственно в диске 76. Аналогично диск 76 может быть выполнен в виде пористого тела с сетью извилистых каналов, выполненных как одно целое в теле. В одном варианте осуществления пористое тело выполнено в виде спеченного металлического тела. Согласно варианту осуществления по фиг. 2, в диске 76 не нужно предусматривать никакие отверстия для текучей среды для обеспечения эффекта демпфирования, например, когда текучая среда движется вдоль диска 76. Текучая среда может быть жидкостью или газом и выбирается для сохранения свойств текучей среды, особенно вязкости, по всему диапазону температур, которым подвергается термокарман 18.
Фиг. 4A – 4C представляют собой поперечные сечения боковой части поглощающей массы 16 по фиг. 3, при этом диски 76 различной формы сконфигурированы для дополнительного осуществления демпфирования за счет сжатой пленки. На фиг. 4A показан диск 76A многоугольной формы. На фиг. 4B показан диск 76B круглой формы. На фиг. 4C показан диск 76C звездообразной формы. Демпфирование за счет сжатой пленки происходит, если две поверхности находятся в непосредственной близости друг к другу и при этом между ними расположена текучая среда. Поверхности располагают так близко друг к другу, что текучая среда может быть “сжатой” и “растянутой” для медленного перемещения поверхностей относительно друг друга. Демпфирование за счет сжатой пленки эффективно, если имеется большое соотношение площади поверхности к ширине зазора. Необходимый эффект демпфирования за счет сжатой пленки для настоящего изобретения может быть достигнут при ширинах зазора вплоть до приблизительно одного миллиметра для амортизирующих текучих сред, например силиконового масла. Однако для других амортизирующих текучих сред могут быть эффективны другие ширины зазора.
В контексте настоящего изобретения поверхности являются концентрическими при постоянном объеме текучей среды, заключенной между ними. Внешняя концентрическая поверхность является внутренней стороной 92 крышки 74, а внутренняя концентрическая поверхность является внешней стороной 94 диска 76. Когда диск 76 колеблется с приближением к крышке 74, поверхность 94 сжимает и растягивает текучую среду по поверхности 92 в стороны, противоположные направлению движения. В особенности, ссылаясь на фиг. 4A, внешняя поверхность 94 диска 76A содержит восьмиугольник, имеющий поверхности 96A и 96B. Как только поверхность 96A приближается к внутренней поверхности 92, текучая среда выталкивается (путем сжатия) из области между крышкой 74 и диском 76, тогда как текучая среда втягивается (путем расширения) в область между поверхностью 96B и внутренней поверхностью 92. Вязкость текучей среды в сжатом состоянии ограничивает скорость, с которой текучая среда будет вытекать из области между поверхностями 92 и 96A. Аналогично вязкость текучей среды в расширенном состоянии будет ограничивать скорость, с которой текучая среда будет затекать в область между поверхностями 92 и 96B. Сжатие и расширение создают обратное давление между поверхностями, в результате чего происходит демпфирование. Демпфирование более эффективно при увеличенных площадях поверхности. Таким образом, поверхности дисков 76A и 76C многоугольной и звездообразной формы позволяют растягивать и сжимать большее количество текучей среды по сравнению с круглым диском 76B. Может использоваться диск 76 любой формы, который независим от направления вращения диска 76 с крышкой 74. Например, могут использоваться многоугольники и звездочки, приведенные на фиг. 4A и 4C, с большим или меньшим количеством сторон. Демпфирование за счет сжатой пленки также может быть осуществлено в варианте осуществления по фиг. 2, где цилиндр 58 размещен в непосредственной близости к внутренней поверхности 66 трубки 34, так что расстояние y2 является малым.
Фиг. 5 представляет собой частичный вид в перспективе другого варианта осуществления изобретения, в котором корпус датчика содержит датчик 100 для измерения средней скорости потока трубкой Пито, к которому может быть прикреплена масса для поглощения колебаний. Датчик 100 для измерения средней скорости потока трубкой Пито содержит верхнюю часть 102, нижнюю часть 104, внутреннюю полость 106, разделитель 108, первое отверстие 110, первый отсек 112, вторые отсеки 114A и 114B, первую плоскость 116 и вторые плоскости 118A и 118B. Датчик 100 для измерения средней скорости потока трубкой Пито содержит сегмент с более длинной трубкой, который присоединен к корпусу передатчика, например корпусу 22 по фиг. 1. Верхняя часть 102 обращена к корпусу 22, при этом датчик для измерения средней скорости потока трубкой Пито 100 присоединен к сквозному отверстию 50 (фиг. 1). Нижняя часть 104 обращена к технологической текучей среды PF (фиг. 1). Дифференциальный датчик давления присоединен к верхнему торцу датчика 100 для измерения средней скорости потока трубкой Пито в корпусе 22 для того, чтобы находится в электронной связи со схемой 26 (фиг. 1) и в гидравлическом соединении с внутренними полостями 112, 114A и 114B. Например, датчик 100 для измерения средней скорости потока трубкой Пито может быть использован в сочетании с индустриальным промышленным передатчиком Emerson ® 3051S Ultra.
Разделитель 108, который содержит первый отсек 112, проходит во внутреннюю полость 106 для образования вторых отсеков 114A и 114B. Первое отверстие 110 проходит через первую плоскость 116 датчика 100 для измерения средней скорости потока трубкой Пито для соединения с первым отсеком 112. Первое отверстие 110 может быть выполнено в виде единственной прорези, как показано на фиг. 5, нескольких прорезей, проходящих по поверхности 116 единственного отверстия, например сквозного отверстия, по первичной плоскости 116 или ряда отверстий по первичной плоскости 116. Вторые плоскости 118A и 118B содержат вторые отверстия (не показаны) для соединения со вторыми отсеками 114A и 114B соответственно. Вышеуказанный дифференциальный промышленный передатчик присоединен к датчику 100 для измерения средней скорости потока трубкой Пито для того, чтобы иметь одну мембрану, подверженную воздействию первого отсека 112, и вторую мембрану, подверженную воздействию вторых отсеков 114A и 114B, как известно из уровня техники. В одном варианте осуществления датчик 100 для измерения средней скорости потока трубкой Пито содержит Rosemount 485 Annubar ®, имеющийся в продаже от Rosemount Inc., Eden Prairie, MN. В другом варианте осуществления датчик 100 для измерения средней скорости потока трубкой Пито содержит Rosemount 585 Annubar ®, коммерчески доступный от Rosemount Inc., Eden Prairie, MN. Первая плоскость 116 сталкивается с потоком технологической текучей среды, таким образом, передатчик может считывать давление торможения, тогда как вторые плоскости 118A и 118B отвернуты от потока технологической текучей среды, таким образом, передатчик может считывать давление спутного потока. Несмотря на то что описанное относится к датчику для измерения средней скорости потока трубкой Пито с трубкой T-образного поперечного сечения, можно использовать другие формы трубок для датчиков для измерения средней скорости потока трубкой Пито. Например, датчик 100 для измерения средней скорости потока трубкой Пито 100 может иметь ромбовидную форму или прямоугольную форму. Кроме того, в датчике 100 для измерения средней скорости потока трубкой Пито 100 не обязательно наличие плоских поверхностей, и он может иметь круглое или овальное поперечное сечение.
Массы для поглощения колебаний согласно настоящему изобретению могут быть присоединены к нижнему торцу датчика 100 для измерения средней скорости потока трубкой Пито. Например, нижняя часть 104 может быть закрыта, так что крышка, стержень и диск, аналогично указанным крышке 74, диску 76 и стержню 78 по фиг. 3, могут быть присоединены к наружной части датчика 100 для измерения средней скорости потока трубкой Пито. Кроме того, нижняя часть 104 может быть открытой, так что консольная балка, например балка 53 по фиг. 2, может быть помещена во внутреннюю полость 106 и закрыта плитой, например плитой 56 по фиг. 2. Установленные таким образом массы для поглощения вибраций могут быть сконфигурированы для снижения или устранения колебаний датчика 100 для измерения средней скорости потока трубкой Пито, как было описано выше.
В настоящем изобретении предлагается способ и устройство для снижения колебаний корпусов сенсорного зонда, которые при эксплуатации располагают в потоках технологической текучей среды. Для данного корпуса датчика, сконфигурированного для размещения в конкретной области турбулентных потоков технологической текучей среды, определены резонансные частоты для этого корпуса датчика в такой области. Поглощающая масса выполнена соответствующим образом для колебаний в области потока с достаточной силой с целью демпфирования резонансных колебаний корпуса датчика. В некоторых вариантах осуществления изобретения поглощающая масса содержит тело, закрепленное с одной стороны. Коэффициент жесткости пружины, коэффициент затухания и величина массы тела, закрепленного с одной стороны, выбирают для обеспечения демпфирования, необходимого для снижения максимальных колебаний корпуса датчика. Снижение уровня колебаний корпуса датчика продлевает срок службы корпуса, а также расположенного в нем чувствительного элемента. Корпус датчика, например, трубки термокармана для считывания температуры технологической текучей среды и трубки Пито или датчики для измерения средней скорости потока трубкой Пито для считывания давления технологической текучей среды могут быть использованы совместно с поглощающей массой согласно настоящему изобретению.
Поглощающую массу прикрепляют к внутренней или внешней части корпуса датчика. В одном варианте осуществления поглощающая масса содержит консольную балку, например, в виде полого цилиндра, проходящую в корпус датчика для окружения датчика. В другом варианте осуществления поглощающая масса содержит консольный маятник, например, в виде диска, подвешенного за стержень, проходящий от наружной части корпуса датчика. Однако эти свойства могут быть достигнуты при других размещениях. Поглощающая масса гасит максимальную амплитуду колебаний корпуса датчика. Поглощающая масса может содержать внутренние каналы, например отверстия или пористые канавки, и может быть погружена в текучую среду, например воздух или текучая среда, для дополнительного создания механизма для демпфирования. Кроме того, поглощающая масса может быть сконфигурирована как демпфер на основе сжатой пленки, в котором текучая среда расположена между двумя площадями поверхности, расположенными в непосредственной близости. Кроме того, поглощающая масса может быть связана с элементами для изменения потока для принудительного отделения граничного слоя технологической текучей среды. При использовании таких деталей, отдельно или в сочетании, может быть существенно увеличена усталостная долговечность корпуса датчика. Демпфирующие и поглощающие характеристики каждой конкретной поглощающей массы могут быть индивидуально просчитаны и выбраны для корпусов датчика, которые будут использованы в известных системах управления технологическими процессами, в которых технологическая текучая среда протекает с предопределенными скоростями потока, вызывающими известные турбулентные силы. Например, свойства поглощающей массы могут быть отрегулированы или изменены во время изготовления для создания корпусов датчика, выполненных согласно требованиям заказчика.
Несмотря на то что изобретение было описано со ссылкой на примерный вариант (варианты) осуществления, специалистам в области техники следует понимать, что могут быть внесены различные изменения, а эквиваленты могут быть заменены на такие же элементы, не выходя за пределы объема изобретения. Кроме того, могут быть внесены различные модификации для адаптации конкретного расположения или материала к идее изобретения, не выходя за пределы его основного объема. Таким образом, следует подчеркнуть, что изобретение не ограничено конкретным описанным вариантом (вариантами) осуществления, но что изобретение включает все варианты осуществления, попадающие в объем прилагаемой формулы изобретения.
Изобретение относится к технологиям, в которых используются текучие среды, и датчикам, использующимся для измерения переменных величин процесса, таких как давление, температура, уровень и расход. Сенсорный зонд содержит трубку, чувствительный элемент и поглощающую массу. Трубка предназначена для размещения в потоке технологической текучей среды в трубопроводе для текучей среды и содержит первый торец для соединения с трубопроводом для текучей среды, а также второй торец для помещения в поток технологической текучей среды. Чувствительный элемент соединен с трубкой. Поглощающая масса соединена с трубкой и предназначена для демпфирования колебаний трубки при ее помещении в поток технологической текучей среды. Датчик расположен внутри защитной трубки, а защитная трубка расположена внутри трубки, при этом чувствительный элемент соединен с трубкой. Поглощающая масса присоединена снаружи трубки и расположена так, чтобы поток технологической текучей среды окружал и обтекал поглощающую массу, и при этом поглощающая масса имеет массу, коэффициент затухания и коэффициент упругости, которые выполнены с возможностью снижения максимальных амплитуд в диапазоне частот, создаваемых технологическим потоком. 2 н. и 21 з.п. ф-лы, 5 ил.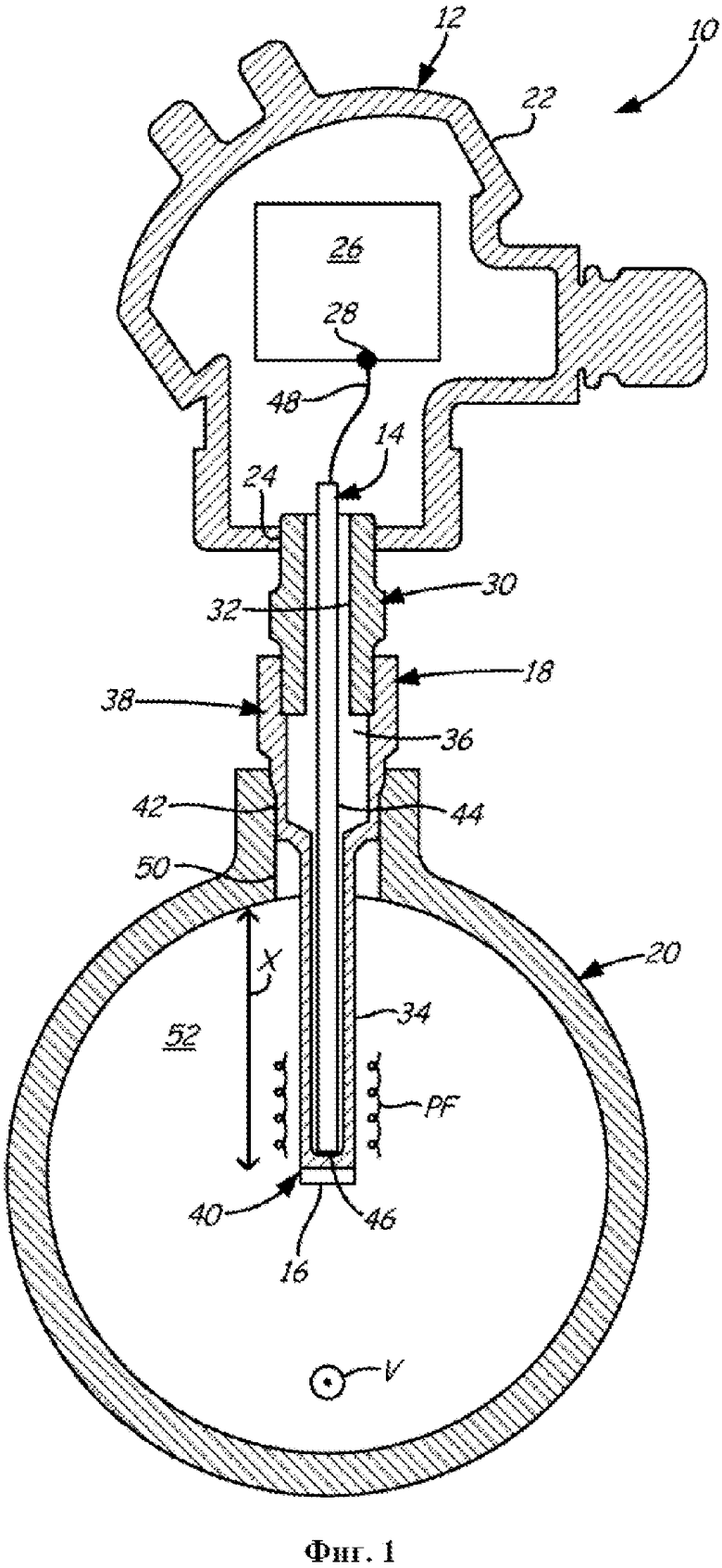
1. Сенсорный зонд, содержащий:
трубку для размещения в потоке технологической текучей среды в трубопроводе для текучей среды так, чтобы трубка находилась в прямом контакте с технологической текучей средой, при этом трубка содержит:
первый торец для соединения с трубопроводом для текучей среды; и
второй торец для помещения в поток технологической текучей среды;
чувствительный элемент, содержащий датчик и защитную трубку, при этом датчик расположен внутри защитной трубки, а защитная трубка расположена внутри трубки, при этом чувствительный элемент соединен с трубкой; и
поглощающую массу, сконфигурированную для демпфирования колебаний трубки при помещении в поток технологической текучей среды, при этом поглощающая масса присоединена снаружи трубки и расположена так, чтобы поток технологической текучей среды окружал и обтекал поглощающую массу, и при этом поглощающая масса имеет массу, коэффициент затухания и коэффициент упругости, которые выполнены с возможностью снижения максимальных амплитуд в диапазоне частот, создаваемых технологическим потоком.
2. Сенсорный зонд по п. 1, отличающийся тем, что поглощающая масса содержит:
ряд сквозных отверстий, проходящих через поглощающую массу.
3. Сенсорный зонд по п. 2, отличающийся тем, что разные сквозные отверстия из ряда сквозных отверстий проходят через поглощающую массу в разных направлениях.
4. Сенсорный зонд по п. 2, отличающийся тем, что поглощающая масса содержит пористое тело.
5. Сенсорный зонд по п. 1, отличающийся тем, что поглощающая масса содержит демпфер на основе сжатой пленки.
6. Сенсорный зонд по п. 5, отличающийся тем, что поглощающая масса имеет профиль поперечного сечения, выбранный из группы, содержащей: многоугольник, звезду или круг.
7. Сенсорный зонд по п. 1, отличающийся тем, что трубка содержит:
элемент для изменения потока, проходящий от наружной части трубки для снижения вихревого потока технологической текучей среды, протекающей вдоль трубки.
8. Сенсорный зонд по п. 1, отличающийся тем, что поглощающая масса прикреплена одним концом к трубке.
9. Сенсорный зонд по п. 8, отличающийся тем, что:
первый торец трубки является открытым;
второй торец трубки является закрытым; и
сенсорный элемент проходит в первом торце трубки.
10. Сенсорный зонд по п. 9, отличающийся тем, что поглощающая масса расположена на закрытом втором торце трубки для того, чтобы закрыть трубку.
11. Сенсорный зонд по п. 10, отличающийся тем, что поглощающая масса содержит:
плиту, закрывающую второй торец трубки; и
консольную балку, проходящую от плиты в трубку.
12. Сенсорный зонд по п. 11, отличающийся тем, что консольная балка содержит:
полое цилиндрическое тело, окружающее чувствительный элемент.
13. Сенсорный зонд по п. 12, отличающийся тем, что дополнительно содержит:
текучую среду, помещенную между консольной балкой и трубкой;
при этом данная балка расположена в непосредственной близости от трубки для достижения эффекта демпфирования за счет сжатой пленки.
14. Сенсорный зонд по п. 9, отличающийся тем, что поглощающая масса расположена на трубке, снаружи закрытого второго торца.
15. Сенсорный зонд по п. 14, отличающийся тем, что поглощающая масса содержит:
торцевую крышку, присоединенную к трубке; и
маятник, проходящий от закрытого второго торца к торцевой крышке.
16. Сенсорный зонд по п. 15, отличающийся тем, что маятник содержит:
стержень, содержащий:
первый торец, проходящий от закрытого второго торца к торцевой крышке; и
второй торец; и
цилиндрический диск, присоединенный ко второму торцу стержня.
17. Сенсорный зонд по п. 15, отличающийся тем, что дополнительно содержит:
текучую среду, помещенную между маятником и трубкой;
при этом балка расположена в непосредственной близости от трубки для достижения эффекта демпфирования за счет сжатой пленки.
18. Сенсорный зонд по п. 1, отличающийся тем, что чувствительный элемент содержит датчик температуры.
19. Способ поглощения колебаний в корпусе датчика, предназначенного для размещения в потоке технологической текучей среды в трубопроводе для текучей среды, при этом способ включает:
определение характеристик потока технологической текучей среды;
определение резонансной частоты корпуса датчика, который будет размещен в потоке технологической текучей среды и присоединен к трубопроводу для текучей среды;
выбор конфигурации поглощающей массы для возбуждения колебания резонансной частоты корпуса датчика, соответствующего характеристикам потока, и их демпфирования;
прикрепление поглощающей массы к наружной поверхности корпуса датчика; и
помещение корпуса датчика в прямой контакт с потоком технологической текучей среды.
20. Способ по п. 19, отличающийся тем, что дополнительно включает:
выбор коэффициента упругости, коэффициента затухания и величины массы поглощающей массы для обеспечения поглощающей массой необходимой силы для демпфирования корпуса датчика.
21. Способ по п. 20, отличающийся тем, что дополнительно включает:
прохождение текучей среды вокруг поглощающей массы для дополнительного демпфирования колебаний корпуса датчика.
22. Способ по п. 19, отличающийся тем, что дополнительно включает:
прохождение технологической текучей среды через элемент для изменения потока, расположенный на наружной части корпуса датчика для принудительного отделения граничного слоя технологической текучей среды.
23. Способ по п. 19, отличающийся тем, что дополнительно включает:
демпфирование за счет сжатой пленки текучей среды между поглощающей массой и корпусом датчика.
| Способ получения магнитной жидкости | 1981 |
|
SU1074825A1 |
| Электролит для химического источни-ка тока с литиевым анодов | 1973 |
|
SU508832A1 |
| US 2004114665 A1, 17.06.2004 | |||
| Частотно-фазовый дискриминатор | 1980 |
|
SU936376A1 |
| US 8215193 B2, 10.07.2012. | |||

