Данное изобретение относится к захватному устройству и к способу захвата листового материала, прежде всего стопки листового материала, а также к установке, которая имеет захватное устройство.
Для транспортировки стопки листового материала из начального положения в целевое положение известны стационарные транспортные устройства, которые отправляют всю стопку из начального положения в целевое положение. Альтернативно, также известно извлечение отдельных листов по отдельности поочередно из стопки листового материала в начальном положении и отправка их в целевое положение, а также, при известных обстоятельствах, последующее складывание их там.
Поскольку такие устройства являются дорогостоящими и негибкими относительно переменного начального положения и целевого положения, соответствующая стопка листового материала транспортируется в некоторых приложениях человеком вручную. Однако также известно использование на месте производимой вручную транспортировки захвата, который может захватывать стопку листового материала и транспортировать ее в целевое положение. Захват сжимает стопку листового материала на ее верхней стороне и нижней стороне для достижения захватного зажима стопки листового материала. Прежде всего, такие захваты могут использоваться для извлечения стопки листового материала из контейнера и для размещения изъятой стопки листового материала в желаемом целевом положении.
Для обработки ценных документов применяются, например, контейнеры, которые могут быть открываемы или постоянно открыты на одной своей стороне, и в которые могут быть вложены одна или несколько стопок ценных документов, образованные из свободных листов ценных документов. Для извлечения ценных документов контейнер расположен, как правило, таким образом, что его открытая сторона обращена вверх, и ценные документы стоят в контейнере на их продольных кромках.
Если в контейнере несколько стопок ценного документа должны сохраняться разделено друг от друга, например для обеспечения возможности различения друг от друга отдельных стопок, контейнер может быть снабжен разделительными элементами, которые подразделяют контейнер на несколько подобластей, ср. фиг. 1A. Как внутренняя стенка контейнера, так и разделительные элементы имеют на их обращенных к поверхностям ценных документов сторонах, как правило, поверхность, выполненную в форме меандра, образованного несколькими выступами и выемками. Для автоматического извлечения захватом стопки ценных документов из контейнера может применяться захват с несколькими захватными пальцами, которые погружаются сверху в выемки выполненной в форме меандра поверхности. В соответствии с этим, выемки контейнера и захватные пальцы захвата приспособлены друг к другу по своему расположению и величине. Захват имеет, например, два подобных граблям захватных элемента, образованные несколькими захватными пальцами, которые могут быть перемещены друг к другу и друг от друга для захвата стопки ценных документов, как только захватные пальцы погружены вертикально в выемки контейнера. Таким образом, с помощью захвата желаемая стопка ценных документов может быть захвачена, изъята из контейнера и уложена на отдалении от контейнера или вложена в установку для обработки ценных документов.
Безотказное извлечения стопки листового материала из контейнера удается производить таким способом, тем не менее, только при таких стопках листового материала, в которых число листов не слишком велико. Это вызвано тем, что большие стопки склонны за счет их большей массы и более неблагоприятной геометрии к выпадению при извлечении стопки из захватного зажима захвата. Кроме того, надежное извлечения смешанных стопок листового материала различной величины особенно затруднено, поскольку это приводит к неравномерным механическим свойствам стопки листового материала. Другое затруднение происходит из того, что сила, которую захват должен приложить к поверхности стопки для удержания стопки против действия силы тяжести и сил ускорения, зависит от трения между захватом и находящимся на поверхности стопки листом, а также от трения между листами стопки, и из того, что эти силы трения варьируются в зависимости от вида и состояния листов. Поэтому до сих пор надежное и безотказное извлечение стопок листового материала возможно только для заданных видов стопок листового материала.
Целью данного изобретения является создание улучшенного решения для изъятия из контейнера находящейся в контейнере стопки листового материала посредством захвата и удержания ее захватным зажимом против силы тяжести.
Эта цель достигнута посредством признаков независимых пунктов формулы изобретения. Другие преимущества данного изобретения получены из зависимых пунктов формулы изобретения.
При очень больших стопках листового материала было замечено, что прикладываемая для захвата сила должна выбираться достаточно большой для обеспечения упругой деформации захватных пальцев под действием силы реакции стопки. За счет деформирования захватных пальцев наружу захватное усилие действует, прежде всего, только преимущественно на края листового материала таким образом, что стопка листового материала может выпасть из захватного зажима.
Захватное устройство согласно изобретению имеет по меньшей мере два захватных элемента для захвата расположенной между захватными элементами стопки листового материала. Захватные элементы могут перемещаться друг к другу для захвата стопки листового материала, и перемещаться друг от друга для последующего освобождения стопки листового материала. Для этого один из захватных элементов может быть выполнен подвижным, а другой быть фиксированным, или оба они могут быть выполнены подвижными. Для достижения захватного зажима стопки листового материала на обоих концах стопки, захватное устройство захватывает стопку таким образом, что оно сжимает стопку на обоих концах стопки в направлении стопки. Захватные элементы имеют в каждом случае по меньшей мере один захватный палец. Захватные пальцы могут прикладываться к конечному листу стопки захватываемой стопки листового материала, который находится на обращенном к соответствующему захватному элементу конце стопки листового материала. Согласно изобретению по меньшей мере один из захватных пальцев одного из захватных элементов является наклоняемым из его исходного положения, в котором он ориентирован по существу параллельно поверхности обращенного к нему конечного листа стопки, в наклоненное положение, в котором он наклонен относительно поверхности обращенного к нему конечного листа стопки. Предпочтительно, все захватные пальцы по меньшей мере одного из захватных элементов выполнены таким образом наклоняемыми. Также и второй захватный элемент может иметь наклоняемые захватные пальцы.
В исходном положении, в котором наклоняемый захватный палец не наклонен, он может погружаться вертикально в выемки выполненной в форме меандра поверхности боковой стенки контейнера. Это выгодно по сравнению с постоянно наклоненными захватными пальцами, поскольку они, если они должны погружаться в такие выемки, вследствие своего наклонного положения нуждаются в большем месте, что идет в ущерб для принимаемого в контейнере объема листового материала.
Наклон захватного пальца согласно изобретению переносит точку приложения, в которой захватное усилие захватного пальца преимущественно воздействует на стопку листового материала, к захватному местоположению, которое располагается теперь не на краю, но, прежде всего, в срединной области стопки листового материала. Наклон захватного пальца противодействует ослабеванию захватного зажима, которое возникает вследствие упругой деформации захватного пальца. Тем самым делается возможным уверенный захват и транспортировка очень больших стопок листового материала и смешанных стопок из листового материала различной величины. При этом захватное устройство согласно изобретению очень гибко в применении относительно захватываемой стопки листового материала. Это вызвано тем, что посредством того же захватного устройства как очень большая стопка листового материала, так и стопка из очень немногих отдельных листов или даже единственный лист могут быть надежно изъяты из контейнера без необходимости предпринимать изменение захватного устройства.
Предпочтительно, каждый захватный элемент имеет в каждом случае по меньшей мере два захватных пальца, которые простираются параллельно друг другу и расположены с удалением друг от друга. Захватные элементы позиционированы, прежде всего, по отношению друг к другу таким образом, что захватные пальцы захватных элементов расположены со смещением друг относительно друга, то есть, захватные пальцы одного из захватных элементов совпадают в каждом случае с промежутками, которые располагаются между захватными пальцами другого захватного элемента. Один или несколько наклоняемых захватных пальцев захватного элемента наклоняются таким образом, что они исполняют в их наклоненном положении захватный зажим стопки, который достаточен для удержания стопки листового материала против ее силы тяжести, и, прежде всего, также против необходимых для транспортировки стопки листового материала сил ускорения. Наклон обеспечивает удержание стопки листового материала только захватным зажимом без необходимости в подпоре стопки листового материала на ее нижней стороне против силы тяжести, то есть без укладывания стопки на опоре.
Захватное устройство подвижно в пространстве и поэтому приспособлено для транспортировки стопки листового материала из начального положения в целевое положение. Захватное устройство может быть укреплено с этой целью, например, на шарнирно-сочлененной руке робота-манипулятора для обеспечения возможности трехмерных перемещений захватного устройства в пространстве (линейных перемещений и перемещений вращения). Например, захватное устройство может быть использовано для изъятия стопки листового материала из контейнера и последующей укладки изъятой стопки листового материала в желаемом целевом положении. Альтернативно, с помощью захватного устройства также возможно извлечение стопки листового материала из произвольного места складирования или из выпускного короба установки для обработки листового материала.
Соответствующий наклоняемый захватный палец выполнен с возможностью наклона вокруг оси, которая ориентирована примерно параллельно обращенной к захватному пальцу поверхности конечного листа стопки, и которая образует с направлением захватного пальца отличный от нуля угол, составляющий, например, 90° или располагающийся близко к 90°. Захватный палец выполнен с возможностью наклона таким образом, что он наклонен в его наклоненном положении вдоль направления, перпендикулярного поверхности обращенного к нему конечного листа стопки (в дальнейшем обозначаемой также как «поверхность стопки»). Внешний конец наклоняемого захватного пальца, который обращен от крепления наклоняемого захватного пальца на захватном элементе, наклоняем к поверхности стопки. В наклоненном положении внешний конец наклоняемого захватного пальца смещается перпендикулярно поверхности стопки относительно тех участков наклоняемого захватного пальца, которые располагаются ближе, чем внешний конец к креплению наклоняемого захватного пальца в захватном элементе. В исходном положении наклоняемого захватного пальца, тем не менее, внешний конец наклоняемого захватного пальца и участки наклоняемого захватного пальца, которые располагаются ближе, чем внешний конец к креплению наклоняемого захватного пальца в захватном элементе, имеют вдоль направления, перпендикулярного поверхности стопки, одинаковое положение. В его исходном положении захватный палец может быть наложен на конечный лист стопки, прежде всего, таким образом, что захватный палец плоско соприкасается с конечным листом стопки, по меньшей мере, на протяжении одной четверти длины, а предпочтительно, по меньшей мере, на протяжении половины длины конечного листа стопки вглубь, причем длина конечного листа стопки рассматривается в направлении, в котором указывает захватный палец. Относительно его исходного положения захватный палец в его наклоненном положении получает острый угол наклона. Этот острый угол наклона составляет, прежде всего, 1°-20°, например 2°-5°.
За счет наклона наклоняемого захватного пальца достигают того, что захватное усилие, которое наклоняемый захватный палец прикладывает в его наклоненном положении к стопке листового материала, передается на стопку листового материала, прежде всего, внешним концом наклоняемого захватного пальца, который обращен от крепления наклоняемого захватного пальца на захватном элементе. В наклоненном положении внешний конец наклоняемого захватного пальца прикладывает захватное усилие к стопке листового материала на конечный лист стопки в захватном местоположении, которое располагается не в пограничной области, а в срединной области стопки листового материала. В качестве срединной области стопки листового материала обозначена та область, которая, при рассмотрении вдоль направления захватного пальца, отдалена от обоих краев стопки листового материала по меньшей мере на 30% ширины стопки листового материала, которую стопка листового материала имеет в направлении захватного пальца. Предпочтительно, захватное местоположение располагается вдоль этого направления, примерно в середине стопки листового материала. Захватное местоположение, в котором захватный палец по существу удерживает стопку листового материала в его наклоненном положении, представляет собой, например, контактную точку, причем, за счет эластичности стопки листового материала, также и в наклоненном положении возможно плоскостное соприкосновение конечного листа стопки с захватным пальцем. Преимущество захватного зажима в срединной области состоит в том, что при транспортировке стопки листового материала посредством захватного устройства ни сила тяжести, ни сила инерционности стопки (при перемещении стопки в пространстве) не могут создавать крутящий момент на стопке, при этом независимо от направления, в котором стопка удерживается. Является наиболее предпочтительным, когда по меньшей мере один из захватных элемента имеет по меньшей мере два вышеуказанных наклоняемых захватных пальца, которые расположены по обе стороны от середины стопки листового материала, прежде всего, расположены примерно симметрично относительно середины стопки листового материала. В каждом случае внешний конец наклоняемого захватного пальца прикладывает в его наклоненном положении захватное усилие к стопке листового материала в захватном местоположении в срединной области стопки листового материала. Оба захватных местоположения расположены по обе стороны от середины стопки листового материала, причем они предпочтительно располагаются симметрично относительно середины стопки листового материала. В случае смешанной стопки листового материала с листами различной величины, которые выровнены односторонне по одной кромке листового материала, захватные местоположения захватных пальцев выбираются, предпочтительно, симметрично относительно середины самого маленького листа стопки листового материала.
В улучшенном варианте осуществления захватные пальцы по меньшей мере одного из захватных элементов выполнены для осуществления выравнивающего перемещения, которое позволяет приспосабливать положение захватных пальцев к неравномерным стопкам листового материала. Это может быть тот же захватный элемент, который имеет также наклоняемые захватные пальцы и/или другой захватный элемент, который не имеет наклоняемого захватного пальца. Для осуществления выравнивающего перемещения захватные пальцы укреплены на захватном элементе таким образом, что они являются перемещаемыми в различные друг от друга положения относительно захватного элемента вдоль направления, перпендикулярного поверхности стопки стопки листового материала. Выполненные для осуществления выравнивающего перемещения захватные пальцы укреплены на захватном элементе таким образом, что они способны к отклонению относительно захватного элемента вдоль направления, перпендикулярного поверхности стопки против действия силы упругости. Вследствие того, что оба захватных пальца являются перемещаемыми в различные друг от друга положения перпендикулярно поверхности стопки, положение каждого из захватных пальцев автоматически приспосабливается к локально различным силам реакции захваченной стопки листового материала, которые имеют разные величины в различных местах на поверхности стопки. Это выравнивающее перемещение захватных пальцев является независимым от вышеназванного наклоняющего перемещения для наклона захватного пальца.
Способность к перемещению захватных пальцев в различные положения перпендикулярно стопке банкнот приводит к тому, что положение соответствующего захватного пальца, которое он получает в момент захватного зажима стопки относительно захватного элемента, варьируется в зависимости от локальной высоты стопки и/или в зависимости от локальных механических свойств стопки. Благодаря данному выравнивающему перемещению захватных пальцев предотвращена существенная неравномерность в распределении захватного усилия между захватными пальцами. Без выравнивающего перемещения, на захватный палец, который захватывает в области большей высоты стопки, приходится очень большой компонент захватного усилия, в то время как на другой захватный палец, который захватывает в области менее значительной высоты стопки, приходится незначительное захватное усилие. При существенно различном распределении усилий возникает опасность того, что стопка выскользнет под воздействием силы тяжести из захватного зажима другого захватного пальца, и что стопка подвергнется повороту образующимся крутящим моментом вокруг захватного местоположения вышеназванного захватного пальца. За счет выравнивающего перемещения захватных пальцев достигают выравнивания друг относительно друга приложенного для захватного зажима захватного усилия захватных пальцев, когда захватывается стопка банкнот с локально различной высотой стопки и/или локально различными механическими свойствами. Например, оба захватных пальца прикладывают примерно одинаковое усилие к стопке. Тем самым также могут быть надежно захвачены и неравномерные стопки листового материала.
Например, два захватных пальца захватного элемента образованы вилкой, которая для осуществления выравнивающего перемещения выполнена с возможностью поворота вокруг оси, которая ориентирована примерно параллельно захватным пальцам и расположена, предпочтительно, примерно на медиатрисе между обоими захватными пальцами. При повороте вилки вокруг оси захватные пальцы перемещаются по отношению друг к другу во встречных направлениях. Если один из захватных пальцев окажется отклонен от поверхности стопки, другой захватный палец автоматически окажется отклонен навстречу поверхности стопки. Вращательное движение вокруг оси вилки захватного пальца происходит против действия силы упругости.
Захватное устройство, предпочтительно, имеет остановочный механизм для выключения привода, который приводит в действие относительное перемещение захватных элементов, и тем самым для автоматической остановки относительного перемещения захватных элементов в тот момент, как только созданная при захватном зажиме сила реакции стопки листового материала превосходит заданную величину. Тем самым достигают того, что на стопку листового материала воздействует предварительно заданное захватное усилие захватного устройства, которого достаточно для надежного захвата, но не повреждения стопки.
В одном варианте осуществления захватное устройство имеет ремень, который механически соединен с одним из захватных элементов для перемещения захватного элемента посредством перемещения ремня относительно другого захватного элемента захватного устройства, и для захвата расположенной между обоими захватными элементами стопки листового материала посредством захватного зажима. Захватный элемент механически выполнен таким образом, что привод перемещения ремня предоставляет также усилие для наклона наклоняемого захватного пальца. При этом наклон вызван силой реакции сжатой стопки листового материала. Поэтому выгодным образом для наклона захватного пальца не требуется использования какого либо иного привода или приводного устройства. Однако относительное перемещение захватных элементов может быть получено и без использования ремня.
В данном варианте осуществления для остановочного механизма натяжение ремня может контролировать, например, датчик, который выполнен для того, чтобы останавливать привод перемещения ремня при превышении заданного натяжения ремня. Предпочтительно, датчик для механического контроля натяжения ремня расположен на том участке вдоль ремня, на котором в случае захватного зажима стопки листового материала производится за счет силы реакции стопки листового материала повышенное натяжение ремня при последующем действии захватного элемента. Прежде всего, датчик имеет ролик, который для контроля натяжения ремня (посредством, например, силы упругости) прижат к ремню, и отклоняется за счет повышенного натяжения ремня в случае захватного зажима стопки листового материала при последующем действии захватного элемента. Отклонение ролика контролирует, например, датчик приближения объекта, который контролирует положение ролика. Если заданное отклонение ролика превышено, датчик выключает двигатель перемещения ремня.
Захватное устройство, прежде всего, выполнено для извлечения стопки листового материала из контейнера, который имеет боковые стенки с поверхностью, выполненной в форме меандра. Боковая стенка с выполненной в форме меандра поверхностью может быть образована размещенным в контейнере разделительным элементом или непосредственно внутренней стенкой контейнера. Предпочтительно, захватное устройство имеет два захватных элемента в каждом случае двумя захватными пальцами, которые выполнены для погружения в выемки выполненной в форме меандра поверхности боковой стенки контейнера, в котором размещена стопка листового материала. Когда контейнер расположен таким образом, что его открытая сторона обращена кверху и листовой материал стоит в контейнере на его кромках, захватное устройство может захватывать стопку листового материала и извлекать ее из контейнера навстречу действию силы тяжести.
Боковая стенка контейнера, которая имеет выполненную в форме меандра поверхность, имеет в некоторых контейнерах свободный от выступов участок, то есть участок, на котором не имеется в наличии каких либо выступов на боковой стенке в форме меандра. Обращенный к этой боковой стенке конечный лист стопки размещенной в контейнере стопки листового материала может выгибаться к боковой стенке на этом свободном от выступов участке. Поэтому, в таком случае является предпочтительным заострение по меньшей мере одного из захватных пальцев, который предусмотрен для погружения при захвате стопки листового материала в этот свободный от выступов участок боковой стенки, на его внешнем конце таким образом, что он может погружаться между выгнутым к боковой стенке конечным листом стопки и свободным от выступов участком. Внешний конец этого захватного пальца, который располагается на обращенной от крепления захватного пальца стороне захватного пальца, заострен таким образом, что толщина захватного пальца убывает вдоль указывающего к середине свободного от выступов участка направления. Тем самым выгнутый конечный лист стопки также может быть надежно захвачен захватным устройством, и полная стопка свободно от повреждений изъята из контейнера.
Изобретение также включает в себя установку для обработки листового материала, прежде всего ценных документов, которая имеет захватное устройство согласно изобретению. Установка может быть представлена установкой обработки ценных документов, которая имеет вводной короб для ценных документов, транспортную систему для транспортировки ценных документов, датчики для проверки ценных документов и один или несколько выпускных коробов для ценных документов. Однако установка может представлять собой по существу только захватное устройство и быть выполненной для встраивания в такую установку обработки ценных документов, или быть предусмотренной для применения совместно с такой установкой обработки ценных документов. Захватное устройство установки может быть выполнено для вкладывания захваченной стопки ценных документов во вводной короб установки для обработки ценных документов и/или для изъятия захваченной стопки листового материала из выпускного короба установки для обработки ценных документов.
Изобретение относится также к способу захвата стопки листового материала посредством захватного устройства. При этом производится относительное перемещение захватных элементов друг к другу за счет относительного перемещения захватных элементов для сжатия расположенной между обоими захватными элементами стопки листового материала и захвата ее захватным зажимом. При этом по меньшей мере один из захватных пальцев наклоняется от его исходного положения в его наклоненное положение. Наклон захватного пальца может быть выполнен уже до начала относительного перемещения или во время относительного перемещения. Относительное перемещение захватных элементов автоматически останавливается, как только захватный зажим достигнут, прежде всего, как только созданная при захватном зажиме сила реакции стопки листового материала превосходит предварительно заданное значение. После чего, захваченная захватным зажимом стопка листового материала транспортируется посредством захватного устройства. Относительное перемещение захватных элементов предпочтительно не производится после остановки относительного перемещения в течение определенного времени ожидания, а после истечения этого времени ожидания выполняется последующий захват стопки листового материала, при котором возобновляется относительное перемещение захватных элементов друг к другу для установления уверенного захватного зажима стопки листового материала также и в случае релаксации напряжений стопки листового материала. Вновь запущенное относительное перемещение захватных элементов автоматически останавливается снова, прежде всего, как только созданная при возобновленном захватном зажиме сила реакции стопки листового материала вновь превзойдет предварительно заданное значение.
Прежде всего, способ выгоден при извлечении стопки листового материала из контейнера посредством захватного устройства. Наклон захватных пальцев производится в таком случае, например, после погружения захватных пальцев в выемки боковой стенки в форме. Шаг транспортировки захваченной захватным зажимом стопки листового материала посредством захватного устройства содержит в этом случае действие по изъятию захватным зажимом захваченной стопки листового материала из контейнера.
Захватное устройство выполняет последующий захват, в то время как оно транспортирует стопку листового материала, прежде всего, после изъятия захватным устройством стопки листового материала из контейнера. В ходе последующего захвата требуемое захватное усилие задается вновь, например, примерно того же значения, как и при первом захватном зажиме. С помощью последующего захвата достигают уверенного захвата также и таких стопок листового материала, которые подвержены релаксации напряжений. Релаксация напряжений стопок листового материала может происходить вследствие пластической деформации стопки листового материала в результате сжатия при захвате, например, в результате незначительных позиционных смещений между листами листового материала. Время ожидания выбирается таким образом, что у стопки листового материала есть достаточное время, чтобы под воздействием захватного усилия, силы тяжести и, при известных обстоятельствах, силы ее инерционности, достигнуть релаксации напряжений после достижения захватного зажима. Например, время ожидания между автоматической остановкой относительного перемещения и последующим захватом составляет несколько десятых долей секунды.
В дальнейшем изобретение описано на примере банкнот в качестве ценных документов. Тем не менее, изобретение не ограничено этим, а подходит, в общем, для листового материала, прежде всего для любых видов ценных документов. Изобретение делает возможным, например, автоматическую обработку большого количества банкнот, причем банкноты сначала подготавливаются для обработки и загружаются в контейнеры. Изъятие банкнот из контейнера и помещение изъятых из контейнера банкнот во вводной короб установки обработки банкнот с помощью захватного устройства, а также обработка банкнот в установке может производиться в таком случае абсолютно автоматически, без производимых вручную манипуляций со стороны обслуживающего лица.
В последующем изобретение разъясняется в качестве примера посредством последующих чертежей. Показано на:
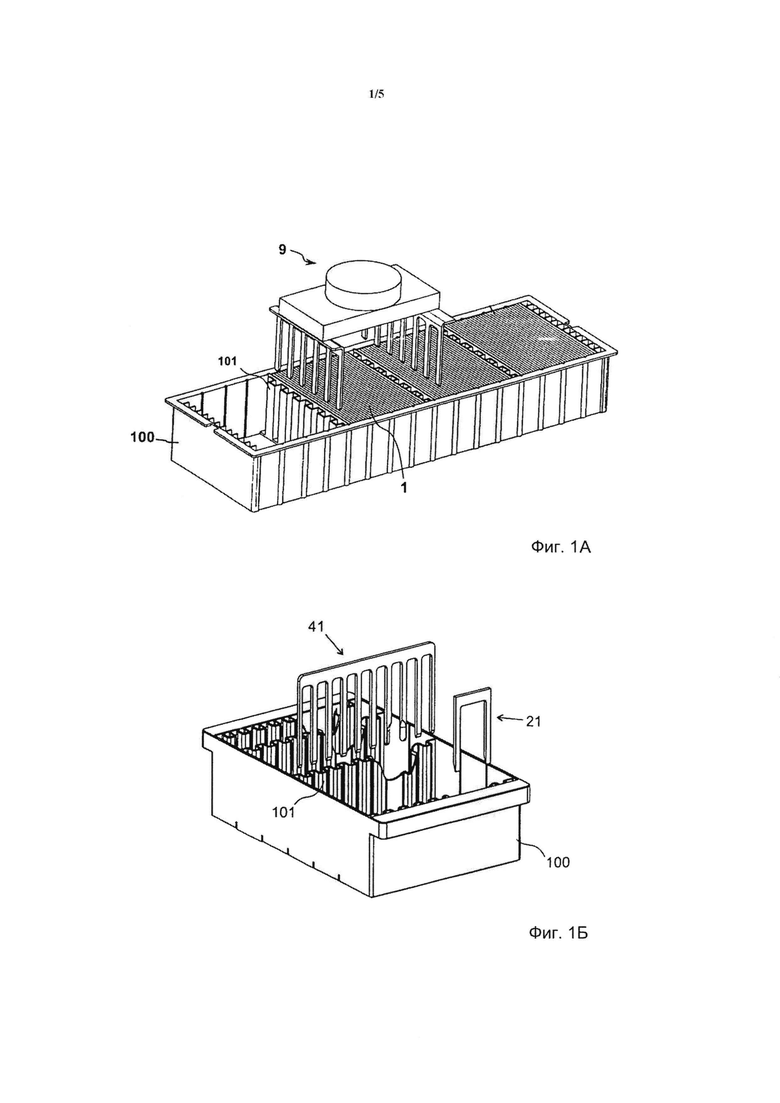
Фиг. 1А-Б - частично заполненный банкнотами контейнер совместно с известным по существу захватом (фиг. 1А) и контейнер совместно с захватными элементами захватного устройства согласно изобретению (фиг. 1Б),
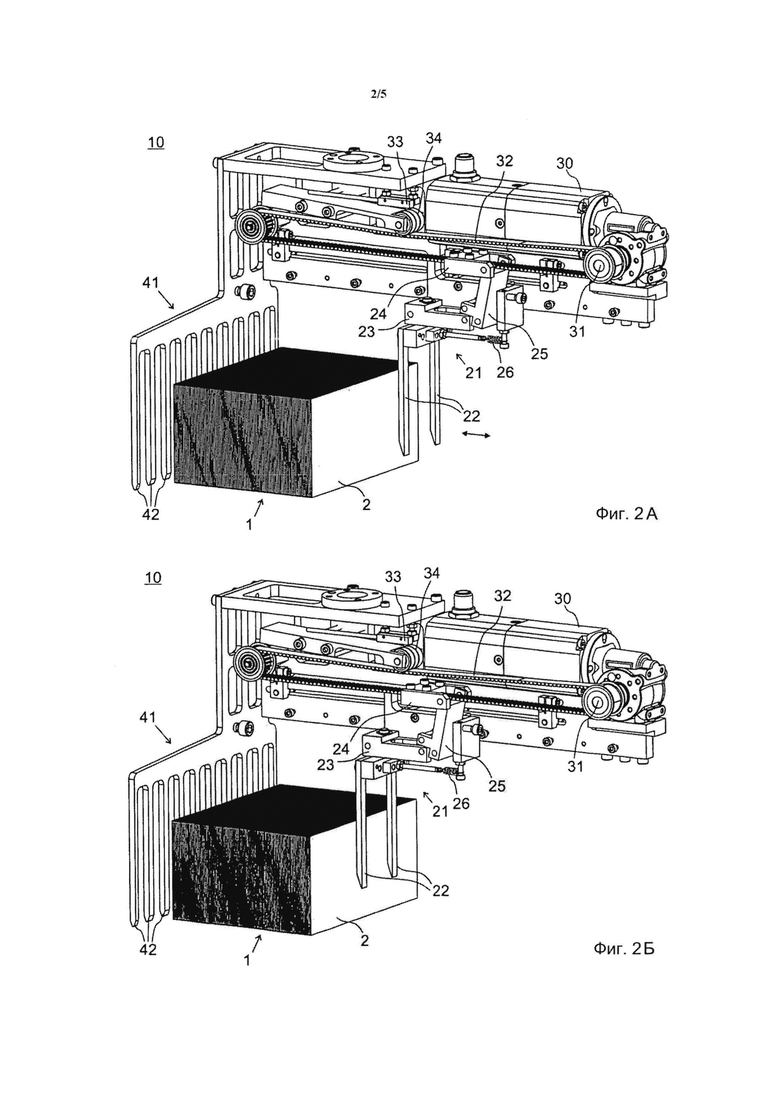
Фиг. 2А-Г - захватное устройство согласно изобретению в различные моменты времени, когда один из захватных элементов перемещается к другому,
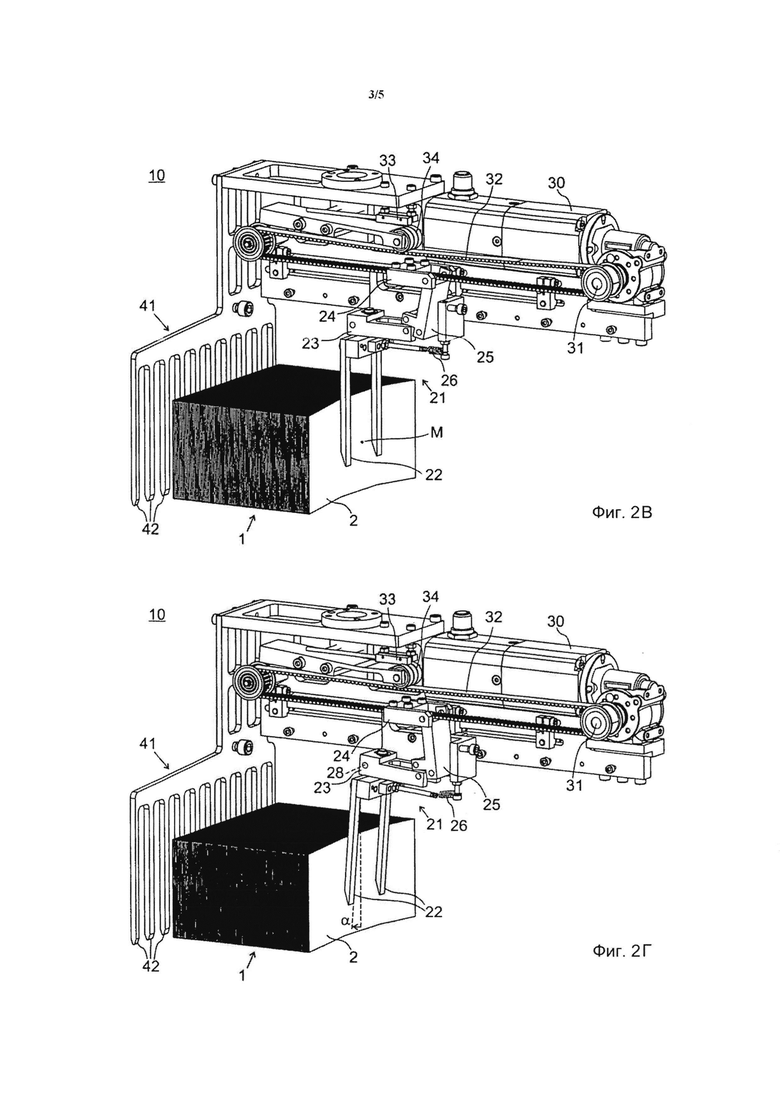
Фиг. 3А-Б - захватное устройство при захвате податливой слева стопки банкнот (фиг. 3А) или же при захвате податливой справа стопки банкнот (фиг. 3Б),
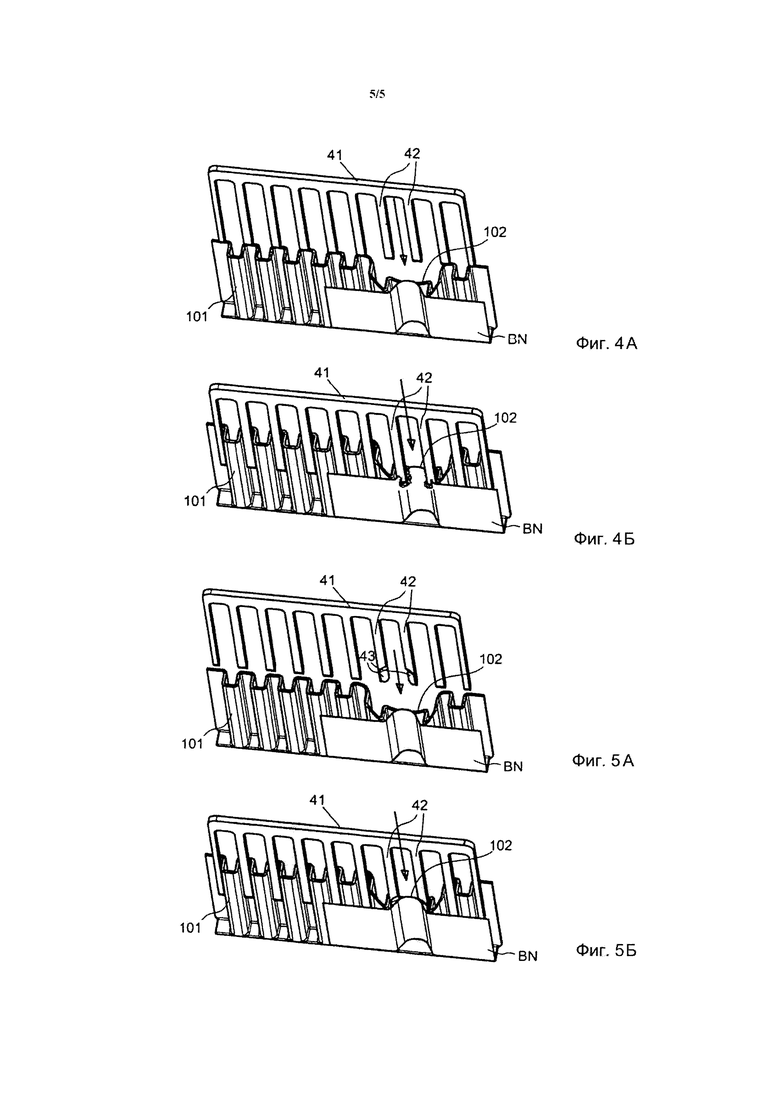
Фиг. 4А-Б - захватный элемент с обычными захватными пальцами, и
Фиг. 5А-Б - специально выполненный захватный элемент для надежного захвата банкнот.
Фиг. 1А показывает частично заполненный банкнотами контейнер 100 совместно с известным по существу захватом 9. Контейнер 100 образован закрытым последовательно с пяти сторон корпусом, который имеет несколько подразделений, которые могут сменным образом принимать разделительные элементы 101. Между разделительными элементами 101 в форме меандра могут быть размещены стопки 1 банкнот. Банкноты при этом размещаются таким образом, что они стоят на их продольных кромках в контейнере 100. Тем самым сделано возможным надежное и эргономически благоприятное наполнение контейнера. Для автоматического извлечения банкнот из контейнера 100 захват 9 опускается в контейнер 1, причем его захватные элементы погружаются в выемки разделительных элементов 101. После опускания два захватных элемента захвата 9 перемещаются один к другому для захватывания стопки 1 банкнот и извлечения ее из контейнера.
Также на фиг. 1Б представлен контейнер 100 для приема стоящих на их продольных кромках банкнот (стопка банкнот 1 не показана на фиг. 1Б). Для извлечения банкнот используется захватное устройство 10 согласно изобретению с двумя захватными элементами 21,41, которые могут быть перемещены друг к другу и друг от друга. Захватные элементы 21,41 являются частью захватного устройства 10, которое подробно описывается посредством фиг. 2А-Г, и из которого на фиг. 1Б показаны лишь оба захватных элемента 21, 41. Для обеспечения возможности надежного захвата и последующей укладки находящейся в контейнере стопки 1 банкнот по меньшей мере один из захватных элементов простирается по существу на протяжении всего внутреннего габарита контейнера 100. Дополнительно, захватное устройство 10 для позиционирования захватных элементов 21,41 может иметь датчики, сигналы которых оцениваются аппаратурой управления для того, чтобы управлять перемещением захватного устройства 10.
Например, в каждом контейнере все банкноты выровнены по их боковыми кромками по одной и той же боковой стенке соответствующего контейнера 100. Тем самым достигнуто, что захватные элементы 21, 41 могут захватывать соответствующую стопку 1 банкнот, без приспособления латерального положения захватных элементов 21,41, всегда в одних и тех же захватных местоположениях (относительно стопки банкнот). Латеральное положение захватного элемента 21 на фиг. 1Б находится, например, справа от середины контейнера и избрано таким образом, что два захватных местоположения расположены двусторонне и симметрично в середине самого маленького возможного формата банкнот в том случае, когда банкноты выровнены по правой боковой стенке контейнера 100. Если банкноты всегда выровнены по правой боковой стенке, эти захватные местоположения относительно самого маленького возможного формата банкнот располагаются в том же самом положении для каждой стопки банкнот.
Разделительные элементы 101 оснащены с двух сторон поверхностью в форме меандра, благодаря чему захватные элементы 21,41 могут заданным образом погружаться между находящимися в контейнере 100 банкнотами для захвата стопки банкнот и изъятия ее из контейнера 100. Устройство и протяженность захватных пальцев захватных элементов 21, 41 приспособлены к форме меандра разделительных элементов 101 таким образом, что они могут погружаться в выемки выполненной в форме меандра поверхности. Наряду с разделительными элементами также передняя и задняя внутренние стенки контейнера имеют выполненную в форме меандра поверхность с выступами и выемками, которая также делает возможным погружение захватных пальцев захватных элементов.
Изъятая из контейнера 100 посредством захватного устройства 10 стопка банкнот 1 затем направляется на обработку, например, посредством установки обработки банкнот. Для этого захватное устройство 10 вкладывает стопку банкнот во вводной короб установки обработки банкнот, из которого банкноты посредством отсекателей отводятся по отдельности. Захватное устройство 10 располагается с этой целью в области вводного короба установки обработки банкнот, что позволяет ему вкладывать изъятые из контейнера 100 банкноты во вводной короб. В пределах дальности действия захватного устройства 10 может быть предусмотрено подходящее приемное устройство для одного или нескольких контейнеров 100. Затем банкноты обрабатываются в установке обработки банкнот, передаются в выпускной короб установки обработки банкнот и подсчитываются.
Фиг. 2А показывает захватное устройство 10 согласно изобретению с двумя захватными элементами 21 и 41. Для захвата стопки 1 банкнот подвижный захватный элемент 21 перемещается к фиксированному захватному элементу 41. Захватный элемент 21 захватного устройства 10 имеет ползун 24, который механически соединен с ремнем 32 захватного устройства 10. Захватный элемент 21 может быть линейно перемещен за счет перемещения ремня 32 к захватному элементу 41 и от него. Ремень 32 перемещается посредством двигателя 30, который приводит в действие приводной ролик 31 ремня 15. Фиксированный захватный элемент 41 имеет несколько захватных пальцев 42, которые распределены по всей длине стопки банкнот. Фиксированный захватный элемент может, однако, альтернативно иметь, меньшее число захватных пальцев. Подвижный захватный элемент 21 имеет в данном примере лишь два захватных пальца 22. Альтернативно, для подвижного захватного элемента, однако, вместо двух захватных пальцев 22 может быть использован также единственный широкий захватный палец или большее двух число захватных пальцев. Также подвижный захватный элемент 21 может иметь несколько захватных пальцев 22, которые распределены по всей длине стопки банкнот.
На фиг. 2А-Г захватное устройство 10 показано в различные моменты времени в процессе непрерывного или пошагового перемещения захватного элемента 21 к другому захватному элементу 41 для захвата стопки 1 банкнот. На фиг. 2А захватный элемент 21 перемещен к конечному листу 2 стопки стопки 1 банкнот, однако он еще не касается его. На фиг. 2Б представлен момент соприкосновения между захватным элементом 21 и конечным листом 2 стопки. Фиг. 2B показывает момент времени, в который стопка 1 банкнот уже прижата посредством захватного элемента 21 к захватному элементу 41, а захватный палец 22, однако, находится еще в его ненаклоненном исходном положении А.
Фиг. 2Г показывает захватное устройство, после того, как захватные пальцы 22 были наклонены в их наклоненное положение К, а стопка банкнот 1 была захвачена.
Захватные пальцы 22 захватного элемента 21 наклоняемы к стопке 1 банкнот посредством механического механизма наклона, которым оснащен захватный элемент 21. Функционирование механизма наклона понятно из сравнения фиг.2 В и 2Г. Исходя из фиг. 2B, на которой захватные пальцы 22 находятся в их ненаклоненном исходном положении А, ползун 24 захватного элемента 21 перемещается посредством ремня 32 далее влево. При продвижении захватного элемента 21 стопкой 1 банкнот создается сила реакции на захватные пальцы 22, которая удерживает захватные пальцы 22 и тем самым соединенную с ними нижнюю часть 23 захватного элемента 21 от следования за перемещением влево ползуна 24. Дальнейшее перемещение ползуна 24 влево и сила реакции со стороны стопки 1 банкнот на захватные пальцы 22 и на нижнюю часть 23 приводят к возникновению крутящего момента на боковой стойке 25 захватного элемента 21, которая соответствующим образом закреплена на ползуне 24 и нижней части 23. Боковая стойка 25 поворачивается вследствие этого на угол против часовой стрелки. За счет поворота боковой стойки 25 нижняя часть 23 захватного элемента, которая закреплена на ее левой стороне, поворачивается по часовой стрелке. Захватные пальцы 22, которые укреплены на нижней части 23, наклоняются за счет поворота нижней части 23 в их наклоненное положение К, например, на угол наклона а величиной несколько градусов вокруг оси 28, ср. фиг. 2Г. Повороту нижней части 23 противодействует сила пружины 26, которая напрягается в результате поворота нижней части 23. Для освобождения стопки 1 банкнот захватные элементы 21, 41 перемещаются вновь друг от друга. Как только противодействие стопки банкнот 1 устранено, захватный элемент 21 силой пружины 26 возвращается вновь в его первоначальное состояние, причем захватные пальцы 22 возвращаются в их ненаклоненное исходное положение А.
Дополнительно или альтернативно к вышеописанному чисто механически управляемому механизму наклона также возможно электронное приведение в действие и управление механизмом наклона захватных пальцев, например, с помощью соответствующих приводных устройств для наклона захватных пальцев, и датчиков. Для этого могут быть использованы датчики, которые обнаруживают положение подвижного захватного элемента и/или обнаруживают силу реакции стопки при сжатии стопки банкнот для приведения в действие наклона захватных пальцев и остановки относительного перемещения захватных элементов.
Если подлежащая захвату стопка банкнот находится в контейнере, как например, в контейнере 100 на фиг. 1Б, подвижный захватный элемент 21 перемещается в приподнятом положении захватного устройства 10 к фиксированному захватному элементу 41 (фиг. 2А, фиг. 2Б), то есть, прежде чем захватные элементы будут опущены в контейнер 100. Только после занятия обоими захватными элементами 21, 41 правильного положения для погружения их в выемки соответствующей выполненной в форме меандра поверхности, захватное устройство 10 опускается в контейнер 100. Это опускание происходит между моментами времени, представленными на фиг. 2Б и 2B. После того, как захватные пальцы погружены в выемки разделительных элементов 101 или же внутренней стенки контейнера 100, подвижный захватный элемент 21 перемещается далее к захватному элементу 41 для сжатия стопки 1 банкнот (фиг. 2B) и для установления наклона захватных пальцев 22 (фиг. 2Г). Таким образом, стопка 1 банкнот захватывается и затем может быть надежно извлечена из контейнера 100.
Захватное устройство 10 имеет, например, механически управляемый остановочный механизм для автоматической остановки перемещения захватного элемента 21, как только созданная при захватном зажиме сила реакции стопки 1 листового материала превосходит заданную величину. В механически управляемом остановочном механизме ременное натяжение ремня 32 контролирует датчик. Датчик для контроля натяжения ремня расположен на том участке вдоль ремня 32, на котором производится повышенное натяжение ремня за счет силы реакции стопки 1 листового материала в случае захватного зажима стопки листового материала при продвижении захватного элемента 21. На фиг. 2А-Г это - участок ремня 32, который располагается вдоль направления движения ремня между ползуном 24 захватного устройства 21 и приводным роликом 31.
Датчик имеет ролик 34, который прижат пружиной к ремню для контроля натяжения ремня. В случае захватного зажима стопки 1 листового материала натяжение ремня в области ролика 34 повышается при продвижении захватного элемента 21 за счет действия силы реакции стопки 1 листового материала и движущей силы приводного ролика 31. За счет повышенного натяжения ремня ролик 34 отклоняется под действием ремня 32, преодолевая силу упругости пружины (по сравнению с фиг. 2B ролик 34 на фиг. 2Г несколько отклонен кверху). Отклонение ролика 34 контролируется, например, датчиком 33 приближения объекта, который контролирует положение ролика, например, индуктивным или емкостным способом. При превышении заданного отклонения ролика 34 датчик 33 приближения объекта выключает используемый для привода ремня двигатель 30 таким образом, что перемещение захватного элемента 21 автоматически останавливается. Двигатель 30 предпочтительно представлен двигателем с самотормозящимся передаточным механизмом, что позволяет сохранять захватный зажим стопки 1 банкнот также при отключенном двигателе 30. При относительном перемещении захватных элементов 21, 41 ролик 34 под влиянием противодействующей отклонению силы упругости пружины вновь прижимается к ремню 32, как только натяжение ремня снова становится нормальным.
В стопках банкнот пленочные элементы банкнот, например размещенные на банкнотах защитные элементы, могут привести к неравномерной высоте стопки и/или к неравномерным механическим свойствам стопки 1 банкнот. Это вызвано тем, что пленочные элементы могут привести к локальной выпуклости банкнот в заданной области или к увеличению локальной толщины банкнот. При наличии нескольких банкнот в стопке банкнот получаются в сумме стопки банкнот с косой или волнистой поверхностью, или стопки, которые в зависимости от положения вдоль поверхности стопки, имеют различную эластичность, и поэтому, предоставляют локально различную силу реакции, ср. фиг. 3А-Б.
Для надежного захвата также и таких стопок банкнот в предпочтительном варианте осуществления по меньшей мере один из захватных элементов (тот же, который имеет наклоняемые захватные пальцы и/или другой захватный элемент) выполнен для осуществления выравнивающего перемещения, которое позволяет производить приспособление захватного элемента к неравномерным стопкам листового материала. Это разъяснено в дальнейшем на примере захватного элемента 21. Для захвата стопки банкнот два захватных пальца 22 захватного элемента 21 расположены с двух сторон от середины М стопки 1 банкнот, ср. фиг. 2B. Захватные пальцы 22 закреплены на нижней части 23 захватного элемента 21 таким образом, что они являются перемещаемыми относительно нижней части 23 вдоль направления, перпендикулярного поверхности стопки стопки 1 листового материала, в различные друг от друга положения. Это выравнивающее перемещение захватных пальцев производится независимо от показанного на фиг. 2В-Г наклоняющего перемещения для наклона захватных пальцев.
В примере на фиг. 3А-Б захватные пальцы 22 образованы вилкой. Эта вилка поворотно-подвижно закреплена на оси 27, которая ориентирована примерно параллельно захватным пальцам 22 и которая расположена примерно на медиатрисе между обоими захватными пальцами, ср. фиг. 3А-Б. Поэтому оба захватных пальца 22 отклоняемы в различные положения перпендикулярно поверхности стопки. Поэтому при захвате стопки, которая имеет неравномерную высоту или неравномерные механические свойства, захватные пальцы перемещаются навстречу друг другу. Поворот захватных пальцев 22 вокруг оси 27 действует против силы упругости пружины 26. На фиг. 3А захватное устройство 10 захватывает стопку 1 листового материала, левая сторона которой имеет большую эластичность, чем ее правая сторона, таким образом, что захватные пальцы 22 при сжатии стопки автоматически немного поворачиваются против часовой стрелки вокруг оси 27. На фиг. 3Б захватное устройство 10 захватывает другую стопку листового материала 1, правая сторона которой имеет большую эластичность, чем ее левая сторона, таким образом, что захватные пальцы 22 немного поворачиваются по часовой стрелке вокруг оси 27.
На фиг. 4А-Б показан захватный элемент 41 в ходе его погружения в выемки выполненной в форме меандра поверхности содержащегося в банкнотном контейнере 100 разделительного элемента 101. Для облегчения производимого вручную извлечения и производимого вручную помещения стопки банкнот в контейнер 100, разделительный элемент 101 имеет свободный от выступов участок 102, на котором прервана форма меандра, и который имеет захватные выемки. Банкнота BN, например конечный лист 2 стопки размещенной в контейнере стопки 1 банкнот, может выгнуться в этот свободный от выступов участок 102, ср. фиг. 4А. Поэтому, при опускании захватного элемента 41 возникает опасность того, что оба попадающих на свободный от выступов участок 102 захватных пальца 42 не погружаются в зазор между банкнотой BN и разделительным элементом 101, а наталкиваются на торец банкноты BN и повреждают его, ср. фиг. 4Б.
На фиг. 5А-Б показан улучшенный в этом отношении вариант осуществления захватных пальцев. Два захватных пальца 42, которые предусмотрены при захвате стопки листового материала для погружения в свободный от выступов участок 102, заострены на их внешних концах. Скос выполнен таким образом, что толщина захватного пальца, которую он имеет перпендикулярно направлению захватного пальца, убывает вдоль направления, указывающего к середине свободного от выступов участка 102. Тем самым эти захватные пальцы могут погружаться без проблем между выгнутой банкнотой BN и свободным от выступов участком 102, ср. фиг. 5Б. Таким образом, также в случае выгибания банкноты в свободный от выступов участок, эта банкнота или же стопка будут надежно захвачены без повреждения банкнот.
Группа изобретений относится к области манипулирования листовыми материалами. Захватное устройство имеет по меньшей мере два захватных элемента для захвата стопки листового материала. Захватные элементы выполнены с возможностью перемещения друг к другу для захвата стопки листового материала. По меньшей мере один захватный палец одного из захватных элементов выполнен с возможностью наклона из исходного положения в наклонное положение. В исходном положении палец ориентирован по существу параллельно поверхности стопки. В наклоненном положении палец расположен наклонно по отношению к поверхности стопки. Обеспечивается возможность надежного и безотказного извлечения из контейнера и удерживания стопок листового материала против действия силы тяжести. 3 н. и 12 з.п. ф-лы, 12 ил. 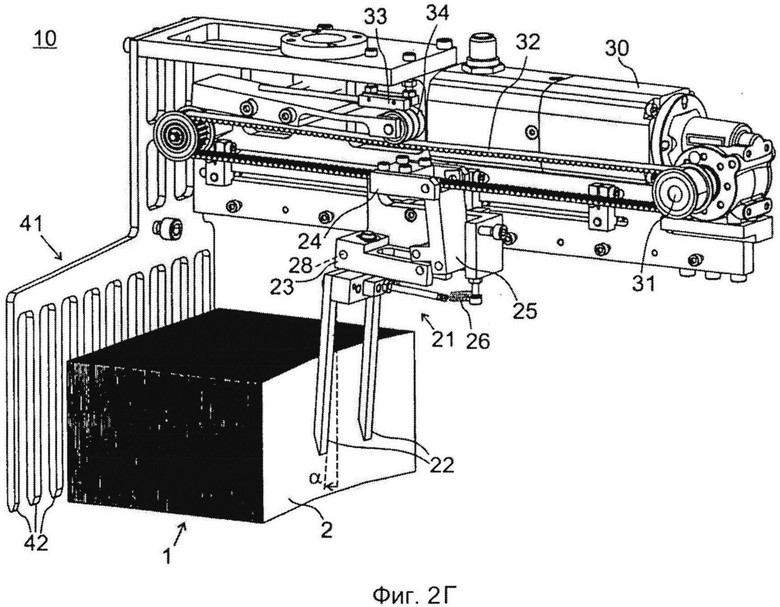
1. Захватное устройство для захвата и транспортировки стопки листового материала, которое имеет по меньшей мере два захватных элемента (21, 41) для захвата расположенной между захватными элементами стопки (1) листового материала, которые выполнены с возможностью перемещения друг к другу для захвата стопки (1) листового материала посредством захватного зажима, причем захватные элементы (21, 41) имеют в каждом случае по меньшей мере один захватный палец (22, 42), который является прикладываемым к конечному листу стопки, находящемуся на том конце стопки листового материала, который обращен к соответствующему захватному элементу (21, 41), так, что захватный палец (22, 42) плоскостно касается соответствующего конечного листа стопки, отличающееся тем, что по меньшей мере один из захватных пальцев (22) по меньшей мере одного из захватных элементов (21) выполнен с возможностью наклона из исходного положения (A), в котором захватный палец (22) ориентирован по существу параллельно поверхности обращенного к нему конечного листа (2) стопки, в наклоненное положение (K), в котором захватный палец (22) расположен наклонно по отношению к поверхности обращенного к нему конечного листа (2) стопки.
2. Захватное устройство по п. 1, отличающееся тем, что наклоняемый захватный палец (22) выполнен с возможностью наклона таким образом, что внешний конец наклоняемого захватного пальца, который обращен от крепления наклоняемого захватного пальца на захватном элементе (21), за счет наклона к поверхности обращенного к наклоняемому захватному пальцу (22) конечного листа (2) стопки располагается под наклоном.
3. Захватное устройство по п. 1, отличающееся тем, что наклоняемый захватный палец выполнен с возможностью наклона вокруг оси (28), которая ориентирована примерно параллельно поверхности обращенного к захватному пальцу конечного листа (2) стопки и которая образует с направлением захватного пальца (22) отличный от нуля угол.
4. Захватное устройство по п. 1, отличающееся тем, что наклон захватного пальца (22) смещает место приложения захватного усилия наклоняемого захватного пальца к захватному местоположению, которое располагается в срединной области стопки (1) листового материала.
5. Захватное устройство по п. 1, отличающееся тем, что, когда один или несколько наклоняемых захватных пальцев (22) находятся в наклоненном положении (K), захватные элементы (21, 41) выполняют захватный зажим стопки (1) листового материала, который достаточен для удержания стопки листового материала посредством захватного зажима против ее силы тяжести.
6. Захватное устройство по п. 1, отличающееся тем, что захватный элемент (21), который имеет наклоняемый захватный палец (22), механически соединен с ремнем (32) для перемещения посредством перемещения ремня захватного элемента (21) относительно другого захватного элемента (41) захватного устройства и для захвата расположенной между обоими захватными элементами (21, 41) стопки (1) листового материала посредством захватного зажима, причем захватный элемент (21) механически выполнен таким образом, что привод перемещения ремня предоставляет также усилие для наклона наклоняемого захватного пальца.
7. Захватное устройство по п. 1, отличающееся тем, что захватные пальцы (22, 42) по меньшей мере одного из захватных элементов (21, 41) выполнены для осуществления выравнивающего перемещения, которое позволяет приспосабливать положение захватных пальцев (22) к неравномерным стопкам листового материала, причем захватные пальцы (22, 42) закреплены на захватном элементе (21, 41), прежде всего, таким образом, что они являются перемещаемыми в различные друг от друга положения относительно захватного элемента вдоль направления, перпендикулярного поверхности стопки (1) листового материала.
8. Захватное устройство по п. 7, отличающееся тем, что захватный элемент имеет два захватных пальца (22), которые образованы вилкой, которая для осуществления выравнивающего перемещения выполнена с возможностью поворота вокруг оси (27), которая ориентирована примерно параллельно захватным пальцам (22) и, предпочтительно, расположена примерно на медиатрисе между обоими захватными пальцами (22).
9. Захватное устройство по п. 1, отличающееся тем, что захватное устройство имеет остановочный механизм для остановки относительного перемещения захватных элементов (21, 41), посредством которого автоматически выключается привод (30) относительного перемещения, как только созданная при захватном зажиме сила реакции стопки (1) листового материала превосходит заданную величину.
10. Захватное устройство по п. 9, отличающееся тем, что захватное устройство имеет ремень (32), который механически соединен с одним из захватных элементов (21) для перемещения посредством перемещения ремня этого захватного элемента относительно другого захватного элемента (41) захватного устройства и для захвата расположенной между обоими захватными элементами стопки (1) листового материала посредством захватного зажима, причем остановочный механизм содержит функцию контроля натяжения ремня посредством датчика (33), который выполнен для остановки привода перемещения ремня при превышении заданного натяжения ремня.
11. Захватное устройство по п. 1, отличающееся тем, что захватное устройство выполнено для извлечения стопки листового материала из контейнера, который имеет по меньшей мере одну боковую стенку с выполненной в форме меандра поверхностью и что захватное устройство имеет два захватных элемента (21, 41), выполненных в каждом случае по меньшей мере с двумя захватными пальцами (22, 42), которые выполнены для погружения в выемки выполненной в форме меандра поверхности боковой стенки контейнера.
12. Захватное устройство по п. 11, отличающееся тем, что боковая стенка контейнера, которая имеет выполненную в форме меандра поверхность, имеет свободный от выступов участок (102) так, что конечный лист стопки размещенной в контейнере стопки листового материала может оказаться выгнутым на этом свободном от выступов участке (102) к боковой стенке, и что по меньшей мере один из захватных пальцев, который предусмотрен при захвате стопки листового материала для погружения в этот свободный от выступов участок боковой стенки, на его внешнем конце заострен таким образом, что он может погружаться между выгнутым к боковой стенке конечным листом (2) стопки и свободным от выступов участком (102).
13. Установка для обработки листового материала, прежде всего ценных документов, которая имеет захватное устройство (10) по одному из пп. 1-12, причем захватное устройство (10) выполнено для укладывания захваченной стопки (1) листового материала во вводной короб установки и/или захватное устройство выполнено для извлечения захваченной стопки листового материала из выпускного короба установки.
14. Способ захвата стопки листового материала посредством захватного устройства (10) по одному из пп. 1-12, например для извлечения стопки листового материала из контейнера (100), с шагами:
- относительное перемещение захватных элементов (21, 41) друг к другу за счет относительного перемещения захватных элементов для сжимания расположенной между обоими захватными элементами стопки (1) листового материала и для захвата ее захватным зажимом, причем по меньшей мере один из захватных пальцев захватных элементов (21, 41) наклоняют из его исходного положения (A) в его наклоненное положение (K), и
- автоматическая остановка относительного перемещения захватных элементов (21, 41), как только захватный зажим достигнут, прежде всего, как только созданная при захватном зажиме сила реакции стопки (1) листового материала превосходит предварительно заданную величину, и
- транспортировка захваченной захватным зажимом стопки (1) листового материала посредством захватного устройства (10), причем захватный зажим изымает захваченную стопку листового материала (1), например, из контейнера (100).
15. Способ по п. 14, отличающийся тем, что относительное перемещение захватных элементов (21, 41) остается на протяжении определенного времени ожидания остановленным после остановки относительного перемещения, и что после времени ожидания выполняют последующий захват стопки (1) листового материала, при котором возобновляется относительное перемещение захватных элементов (21, 41) друг к другу для установления надежного захватного зажима стопки листового материала также и в случае релаксации напряжений стопки (1) листового материала.
| US 5425565 A, 20.06.1995 | |||
| КОРМОВЫЕ КОМПОЗИЦИИ ДЛЯ ДОМАШНИХ ЖИВОТНЫХ | 2016 |
|
RU2740439C2 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПАКЕТОВ БЛАНКОВ ЦЕННЫХ БУМАГ ИЗ ПАЧЕК БЛАНКОВ ЦЕННЫХ БУМАГ | 1994 |
|
RU2121453C1 |
| DE 4401818 A1, 27.07.1995. | |||

